國 立 交 通 大 學
機 械 工 程 學 系
碩士論文
定壓型並聯離心式流體機械之節能設計
Optimalization of Constant Pressure Centrifugal
Machines in Parallel
研究生:林佑璁
指導教授:傅武雄 博士
中華民國一百年六月
定壓型並聯離心式流體機械之節能設計
Optimalization of constant pressure centrifugal machines
in parallel
研 究 生:林佑璁 Student: Yu-tsung Lin
指導教授:傅武雄 Advisor: Wu-Shung Fu
國立交通大學
機械工程學系
碩士論文
A Thesis
Submitted to Department of Mechanical Engineering
College of Engineering
National Chiao Tung University
in Partial Fulfillment of the Requirements
for the Degree of
Master of Science
in
Mechanical Engineering
June 2011
定壓型並聯離心式流體機械之節能設計
研究生:林佑璁 指導教授:傅武雄 博士
國立交通大學機械工程學系
摘要 本文主要目的為採用多台不同型式之離心式流體機械的並聯方式,進行複雜 管路流量計算。對於複雜管路系統,單台離心式流體機械往往無法提供龐大的流 量需求,必須採用多台並聯的方式處理,故要找出不同形式離心式流體機械並聯 之性能曲線和阻抗曲線組合圖。 本文另一目的是利用上述結果,將定壓型流體機械並聯系統配合複雜管路系 統模擬不同負載下的最佳並聯台數與各台之最佳操作條件含壓力與轉速的組合 狀態。接著將各種負載不同台數的情況依序記下,並繪製出總耗能曲線做成資料 庫,而達成客製化的結果。Optimalization of constant pressure centrifugal machines in parallel
Student:Yu-tsung Lin Advisor:Wu-Shung Fu Department of Mechanical Engineering
National Chiao Tung University
Abstract
The aim of this study is to solve the complex piping problems and obtain the optimal situation with the differences of centrifugal machineries in parallel. In order to provide huge mass flow rate, the centrifugal machineries in parallel are necessary, so we need to find the combination sketch of performance curve and impedance curve of different centrifugal machineries in parallel.
The other aim of this study is to use the above-mentioned result to simulate the best combination condition of different number of centrifugal machineries in parallel and operating condition of different loads. Then take down all data of combination conditions and plot the total curve of energy consumed. After that, we can obtain the optimization curve and reach the result of customization.
致 謝
目錄
中文摘要……… I 英文摘要……… II 致謝……… III 目錄……… IV 表目錄……… V 圖目錄……… VI 照片目錄……… Ⅸ 符號說明……… X 第一章 緒論……… 1 第二章 物理模式………. 7 第三章 數值方法……… 46 第四章 結果與討論……… 53 第五章 結論……… 124 參考文獻……… 125表目錄
表 4-1 系統各管段與工作流體資料………... 56 表 4-2 並聯兩台動力源系統及各管段與工作流體資料……… …...74 表 4-3 一台泵浦在手動模式下各頻率之壓差值和總功率……… ….97 表 4-4 兩台泵浦在手動模式下各頻率之壓差值和總功率……… ….99 表 4-5 三台泵浦在手動模式下各頻率之壓差值和總功率……… …...101 表 4-6 四台泵浦在手動模式下各頻率之壓差值和總功率……… …...103 表 4-7 五台泵浦在手動模式下各頻率之壓差值和總功率………105 表 4-8 在自動模式 0.06bar 下各台數之頻率和總功率……… …..107 表 4-9 在自動模式 0.04bar 下各台數之頻率和總功率……… …..108 表 4-10 在自動模式 0.02bar 下各台數之頻率和總功率……… ……109 表 4-11 五台泵浦總負載時最高頻率之結果圖……… ….110 表 4-12 五台泵總流量降至 300CMH 之結果圖……… ….111 表 4-13 五台泵總流量降至 200CMH 之結果圖……… ….112 表 4-14 五台泵總流量降至 100CMH 之結果圖……… …113 表 4-15 四台泵總流量調升至 300CMH 之結果圖(僅模擬其結果) ………… ….114 表 4-16 四台泵總流量降至 200CMH 之結果圖………. 115 表 4-17 四台泵總流量降至 100CMH 之結果圖……… ….116 表 4-18 三台泵總流量降至 200CMH 之結果圖………117 表 4-19 三台泵總流量降至 100CMH 之結果圖……… ….118 表 4-20 二台泵總流量降至 100CMH 之結果圖……… ….119 表 4-21 三台泵總流量降至 120CMH 之結果圖 ……… ….123圖目錄
圖 1-1 固定轉速(1750rpm)之某工業用泵浦曲線資料圖……….…..6 圖 2-1 物理模式示意圖……… ….15 圖 2-2 某泵浦轉速 1750rpm 資料圖………. …….16 圖 2-3 資料點與二次多式式曲線圖……….… 17 圖 2-4 90 度圓形彎角……….…..18 圖 2-5 其它角度彎角……… ...19 圖 2-6 三管相連接………. 20 圖 2-6 三管相連接(續)……… …..21 圖 2-7 風門與損失係數……… ….22 圖 2-8 管路突擴與突縮損失係數……… ….23 圖 2-9 單台、兩台與三台動力源並聯的性能曲線……… …..30 圖 2-10 某動力源性能曲線與系統阻抗曲線……… …...31 圖 2-11 轉速N 和O N 之性能曲線與系統阻抗曲線……… …. 32 R 圖 2-12 某 A 型與 C 型性能曲線與不同之操作點……… …. 33 圖 2-13 某 A 型與 B 型性能曲線與近似之相同操作點……… … 34 圖 2-14 某 A 型與 B 型並聯後之性能曲線……… ..35 圖 2-15 取三個操作點利用二次曲線近似之性能曲線……… … ..36 圖 2-16 兩台離心式流體機械並聯模式之物理模式圖……… …. ..37 圖 2-17 泵浦直徑之修正圖………....…. 42 圖 2-18 以二次多項式表示效率曲線……… ...…43 圖 2-19 以三次多項式表示效率曲線……… ……44 圖 2-20 以四次多項式表示效率曲線……… ...…45 圖 4-1 管路結構……… ….…57圖 4-2 某廠商用 A 型泵浦與 B 型泵浦以二次多項式表示之性能曲線……… …58 圖 4-3 A 型泵浦 1750 轉於圖 4-1 之系統流量分佈………59 圖 4-4 A 型泵浦對應圖 4-1 及圖 4-3 系統的性能曲線及阻抗曲線………… ……60 圖 4-5 A 型泵浦 2304rpm 在圖 4-1 之系統流量分佈……… ……61 圖 4-6 A 型泵浦對應圖 4-1 及圖 4-5 系統的性能曲線及阻抗曲線………… ……62 圖 4-7 B 型泵浦 1750rpm 在圖 4-1 之流量分佈……… …..63 圖 4-8 B 型泵浦對應圖 4-1 及圖 4-7 之系統的性能曲線及阻抗曲線……… ……64 圖 4-9 B 型泵浦 2515rpm 在圖 4-1 之系統流量分佈……… …..65 圖 4-10 B 型泵浦對應圖 4-1 及圖 4-9 之系統的性能曲線及阻抗曲線……..……66 圖 4-11 兩台並聯動力源形式之管路系統……… …...67 圖 4-12 相同 A 型泵浦 1750rpm 並聯對應圖 4-11 系統之流量分佈………….…..68 圖 4-13 相同 A 型泵浦並聯對應圖 4-12 個別之阻抗曲線及性能曲線……….….69 圖 4-14 相同 A 型泵浦調至每個出口流量相同……… ..…70 圖 4-15 相同 A 型泵浦調至每個出口流量相同之個別之阻抗曲線及性能曲線…71 圖 4-16 相同 A 型泵浦 1750rpm 並聯調至所需流量 3000CMH………...72 圖 4-17 相同 A 型泵浦 1750rpm 並聯調至所需流量 3000CMH 之阻抗曲線及性能 曲線……… ...73 圖 4-18 不同型動力源並聯管路系統之型式………75 圖 4-19 一 A 一 B 型泵浦 1750rpm 並聯對應圖 4-18 系統之流量分佈………….76 圖 4-20 一 A 一 B 型泵浦並聯對應圖 4-18 個別之阻抗曲線及性能曲線…… ….77 圖 4-21 一 A 一 B 型泵浦並聯所對應之阻抗曲線及性能曲線………78 圖 4-22 五台泵浦輸入物理模式示意圖………86 圖 4-23 廠商使用之泵浦性能曲線示意圖………87 圖 4-24 廠商使用之泵浦效率曲線示意圖………88 圖 4-25 等壓條件下改變轉速之方法示意圖………89 圖 4-26 現場所使用之 PLC 控制介面………92
圖 4-27 五個平衡閥全開(上圖)和只開三個平衡閥(下圖)之比較………...96 圖 4-28 一台泵浦在手動模式下之示意圖………... 98 圖 4-29 兩台泵浦在手動模式下之示意圖………..100 圖 4-30 三台泵浦在手動模式下之示意圖………..102 圖 4-31 四台泵浦在手動模式下之示意圖………..104 圖 4-32 五台泵浦在手動模式下之示意圖………..106 圖 4-33 三台、四台和五台在所需流量 200 CMH 之總功率比較圖………….…120 圖 4-34 兩台、三台、四台和五台在所需流量 100 CMH 之總功率比較圖… …121 圖 4-35 各台泵浦在操作範圍內之流量對功率圖………...122
照片目錄
照片 4-1 現場實驗機台之陳設情況……… 93 照片 4-2 泵浦之入口閘門關閉情形……… 94 照片 4-3 平衡閥區及壓力測詴計……… 95
符號說明
n A 管路編號 n 的截面積 [m2 or inch2] sn A A 型動力源性能曲線方程式在初始轉速(或直徑)的 各項係數值 sn B B 型動力源性能曲線方程式在初始轉速(或直徑)的 各項係數值 O BHP 離心式流體機械在初始轉速(或直徑)時的功率 [W or HP] R BHP 離心式流體機械在變更轉速(或直徑)時的功率 [W or HP] b C 彎角損失常數 c b C , 三管連接流經子管與連管損失常數 n C 出入口兩端壓力相差值 [Pa(帕)or Ft(水頭)] c s C , 三管連接流經主管與連管損失常數 Sn C 性能曲線方程式在初始轉速(或直徑)的各項係數值 Sn C 性能曲線方程式在變更轉速(或直徑)的各項係數值 n D 管路編號 n 的管徑 [mm or inch] O D 離心式流體機械的原始直徑 [mm or inch] R D 離心式流體機械的變更直徑 [mm or inch] i E 效率曲線方程式在初始轉速(或直徑)的各項係數值 i E 效率曲線方程式在變更轉速(或直徑)的各項係數值 n e 管路編號 n 的壁面絕對粗糙度 [mm or inch] Ef 離心式流體機械效率值 O Ef 離心式流體機械在初始轉速(或直徑)的效率值 R Ef 離心式流體機械在變更轉速(或直徑)的效率值 n f 管路編號 n 的摩擦因子n G 管路編號 n 離心式流體機械配方衍生項(兼 A 型動 力源) n H B 型動力源管路編號 n 離心式流體機械配方衍生項 n K 管路編號 n 的壓力損失係數 sys K 系統需求常數,等於 2 sys sys Q P n L 管路編號 n 的長度 [m or Ft] O N 離心式流體機械的初始轉速 [rpm] R N 離心式流體機械的變更轉速 [rpm] JP Q J 台並聯的總流量 [CMS or GPM] n Q 管路編號 n 的流量 [CMS or GPM] sys Q 系統需求流量 [CMS or GPM] n Re 管路編號 n 流體的雷諾數 i S 功率曲線方程式在初始轉速(或直徑)的各項係數值 n P 節點編號 n 流體的全壓值 [Pa(帕)or Ft(水頭)] sys P 系統所需克服的壓力 [Pa(帕)or Ft(水頭)] c v P, 流體之動壓值 [Pa(帕)or Ft(水頭)] n V 管路編號 n 流體的平均速度 [m/s or Ft/s] n P 流體流經管路編號 n 的壓損值 [Pa(帕)or Ft(水頭)] 流體密度 [kg/m3 or lbm/Ft3] 流體黏滯係數 [kg/m〃s or lbf〃s/Ft2]
第一章 緒論
近十幾年來,工業成長迅速,台灣半導體產業更加蓬勃發展,量產技術不斷 提昇,廠房也日益擴大。然而其所造成的環境汙染及能源消耗的問題日益嚴重, 因此如何減少能源無謂的浪費乃是各界努力追求的方向。金融風暴過後,景氣不 斷回甦加溫,許多廠商也陸續新增廠房,對此台灣的就業率大幅提升, 然而在 製造過程中,許多產業常常使用有害人體健康的化學物質,這意味著若沒有良好 的製程排氣系統設計,將對工作環境品質及其操作員的健康造成莫大的傷害,所 以複雜管路系統計算方法的探討與研究,為目前急需解決的問題。 複雜管路系統實際應用範圍十分廣泛,不論是工業的排氣系統、大樓的通風 管路,亦或流體輸送系統等,所使用之基本理論是一樣的,包含管段所造成的摩 擦損失(從 Moody diagram 得來,即 Darcy-Weisbach 公式),其它設計配件所造成 的全壓損失(通稱 Minor Loss)所累加之阻抗曲線,配合所使用風機或泵浦的性能 曲線,求得壓力和流量關係。在複雜管路系統設計上,必需考慮傳送流量和流速 的限制,以及系統壓力平衡性、噪音、空間配置及系統造價成本的問題。進行管 路系統設計時,必需知到的條件通常有:配件及設備資料、設計限制及參數資料、 系統資料和管段資料。待求的設計項目有:各管段的直徑大小和全壓損失,並決 定出適當風機或泵浦的全壓。縱使在設計中已考慮到許多物理因素,但設計出的 管路系統,在壓力的平衡性效果常常不好。以下將會介紹出常見的管路系統設計 方法,並探討其優缺點。 目前常見複雜管路的設計方法主要有五種[1]:速度法(Velocity Method)、等 摩擦法(Equal Friction Method)、靜壓再得法(Static Regain Method)、T-最佳化設計 方法(T-Method Optimization)和 T 模擬方法。速度法的設計原理,是先設定系統中所有管段之流速,然後再依該管段之流 率與流速進行尺寸設計。又可分成等速度法(Constant Velocity Method)和速度遞 減法(Velocity Reduction Method)。為了控制噪音問題,會有速度的上限;為了避
免污染物堆積,造成管路堵塞的問題,會有速度的下限。速度法是目前所有設計 方法中最簡單的,然而系統壓力不易平衡,設計後須花費額外的時間和成本進行 壓力調整平衡。 等摩擦法是假設系統中所有管段的單位長度全壓損失都相同,此處所指的長 度,是管段本身的長度再加上屬於該管段配件的等效長度。利用迭代的計算程 序,取得新的等摩擦率,將其應用在原先壓降較小的路徑,透過減小下游管段的 尺寸,以改良壓力的平衡。然而在系統中若存在各個路徑,其總長度相差極大, 壓力的平衡性會出問題,因此等摩擦法通常適用在對稱性系統,或是系統中各路 徑總長度接近。 靜壓再得法是將 Bernoulli 方程式及 Borda 方程式結合後推導出靜壓再得計 算公式,並在風管系統中利用動壓損失所轉換之靜壓再得(static regain)來節省能 源。但從流體力學的觀點上,靜壓再得法理論的不適用性包含有: (1)Bernoulli 定律不適用於分歧的樹狀管路系統 (2)靜壓再得法無法真正使系統壓力平衡 (3)靜壓再得因子的不確定性 (4)不可能利用動能轉換為靜壓再得的過程達到節省能源的目的。 T-最佳化設計方法以管路系統的生命週期成本(包含風機運轉所消耗的能源 成本及管路系統建構成本)為基礎,在嚴謹的數學模式下,使用迭代的計算程序 及成本最佳化理論,除了使生命週期成本最小化之外,並在各路徑上都有相同的 全壓損失,不必花多餘時間及成本進行系統的壓力平衡工作。設計的過程包含系 統收縮、風機選擇與系統展開這三個步驟,T-最佳化設計方法的缺點在於流速控 制性較差。 T 模擬方法(T-Method Simulation)是用來針對一個已經設計完成的管路系 統,利用系統收縮、選取風機操作點和系統展開的三步驟,求取系統管段內的流 量分配,可以其發現計算流程和 T-最佳化設計方法十分相似,都是屬於 T 方法 理論。
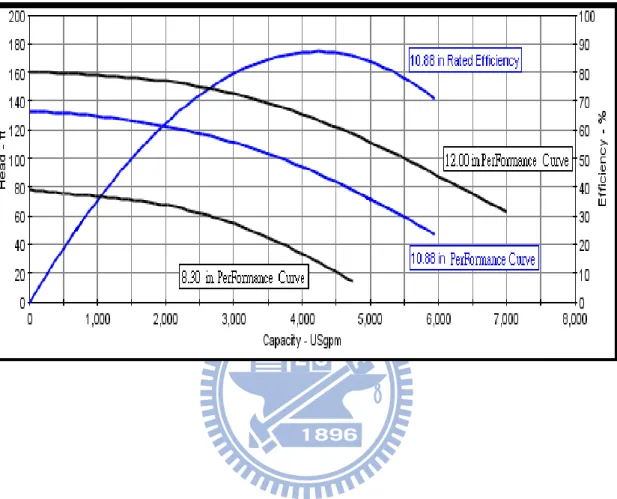
雖然目前發展出許多套設計方法,但是設計與實際運作中,仍然會有些許的 差距,此時必須依靠其它裝置來進行調整。經這些更動之後,常常會影響到其它 管路流量的大小。常見工廠管路系統變更的方式有:改變風門(damper)檔板的角 度、改變管段的尺寸與性質、增加工作區與配件、對風機作變頻控制、更換風機、 風機的串並聯等等。然而在半導體廠房裡,在沒有任何的評估之下,憑經驗來做 手動操作是很大膽的行為,若是操作不當,很容易造成管路系統完全癱瘓,甚至 危害到員工的生命安全。因此必需借助模擬的方式,針對實際的管路配置與風機 條件,著手進行計算,來達到改進的要求。因此模擬出實際管路系統的運作情況, 扮演著極重要的地位。 Jeepson[3]利用克西赫夫(Kirchhof)的第一、第二定律,在節點處建立連續方 程式和以迴圈為基礎的能量方程式,得到足夠的方程式,求得複雜管路系統內部 流體流量及流動的情形,雖然可以求得多台泵浦同時存在的情況,然而對並聯形 式的例子卻沒有說明。而 Osiadacz[4]在管路系統建立方程式的演算法,有詳盡的 說明。 林[5]將 Jeepson 和 Osiadacz 的理論結合後,求出複雜管路內的流量分佈情 形,並從中知道,進行管路系統模擬時,離心式流體機械的性能曲線可以由二次 多項式表示,此二項式和原性能曲線極為吻合。其餘各管路元件的壓力損失係 數,皆可在 ASHRAE 的手冊[6]查表求得。 對於複雜的管路系統計算,離心式流體機械是影響流量最重要的因素,然而 廠商所提供的離心式流體機械,只有在某固定轉速下的性能曲線和機械效率曲線 等相關資料如圖 1-1,對於其它未知轉速下的資料,必需靠其它相關的公式求得。 在調整轉速方面,文獻[7][8]說明了風機定律,指出風機轉速與流量、壓力和功 率之間的關係式;而文獻[9]說明了泵浦的相似定理,其轉速與流量、壓力和功 率之間的關係式,均與風機定律相同,此外也提供了泵浦變更的直徑時,直徑與 流量、壓力和功率的關係式,當變更直徑與原提供直徑相差愈大,計算出來的誤 差也愈大,因此理想的使用範圍為變動直徑不小於原直徑的 70%。文獻[10]更是
提出泵浦的相似定理,在直徑上的修正方法。 文獻[11]同樣使用 Darcy-Weisbach equation 來進行複雜管路的數值模擬計 算,然而在分離變數、矩陣畫分等條件的不同,所以可以得到一套新的分析方式, 而文獻最後有提出幾個問題可得到近似的解答。文獻[12]將複雜管路運算應用到 大型渦輪船的引擎室,使用控制原理,將管路、閥、管接點和離心式泵浦等各構 造的摩擦因子做串聯或並聯的運算,最後在用矩陣疊代運算得出結果。 在複雜管路系統環境下,單台離心式流體機械往往難以提供龐大的需求流 量,為了使總流量提高,最常使用的方法為使多台離心式流體機械並聯運作。而 林[5]指出當多台相同之離心式流體機械並聯時,可以將其等效於單台離心式流 體機械。即假設每台離心式流體機械所分配的流量相同,所提供的壓力也相同, 因此可以看成有一台離心式流體機械在運作時,與並聯時對系統造成的影響相 同,此台假想之離心式流體機械提供的流量和並聯時的總流量相同,而提供的壓 力是實際上單台所提之壓力。此方法也是在目前管路系統設計或模擬上,最常用 的方法。而施[13]將並聯相同型式離心式流體機械每一台實際上的流量分配完整 求出,進而使流量均勻分配,並計算在所需流量和壓力的條件下,找出最省功率 的並聯方式。張[14]模擬多台且不同形式之離心式流體機械並聯的管路系統,求 得每根管段與每台流體機械的實際流量。並探討每台之性能曲線與系統阻抗關 係,且由計算結果分析出最省能的並聯台數。然而在廠房所使用之流體機械皆為 定壓模式,對此未有完整說明,而這也是目前業界所需解決的問題。 為確保生產所需流體的供應量不致中斷及降低成本考量,提供供應量的流體 機械也都採用複數台並聯式供應系統而不採用單機系統。由於所需流體為屬大流 量與中低靜壓,因此以離心式流體機械為主,而非軸流式流體機械。廠房所需流 體機械台數與總流量的採用標準約為生產滿負載(100%)加某程度的安全裕度下 的最佳配置。此時通常為效率最高的狀態,但當負載因某些因素而調整時(通常 負載低於 100%狀況),則原最佳配置狀態將改變,而有它種形式之最佳狀態存 在。亦即原最佳配置狀態為過量供應,浪費額外能源。惜至今尚未見到實務的方
法,能有效解決在各負載下台數最佳配置的方法。 因此本文之目的在於將定壓型流體機械並聯系統配合複雜管路系統模擬不 同負載下的最佳並聯台數與各台之最佳操作條件含壓力與轉速的組合狀態,在數 值分析中能和泵浦隨機所附的性能曲線和效率曲線吻合,因此可以得到良好的結 果。接著將各種負載不同台數的情況依序記下,並繪製出總耗能曲線做成資料 庫,如此便能達成客製化的目的。最後將此套結果套用在實驗上以做進一步確認。 由於實驗設備為閉環管路,使用可編程控制器(PLC)來實現 PID 控制。PID 控制具有穩定性好、工作可靠、調節方便且結構相當簡單等優點,在工業控制中 受到相當廣泛的使用,透過其簡單的操作介面,能快速擷取所需的資料點,進而 和模擬結果做比對,比較兩者的趨勢,若能相互吻合,即代表數值模擬結果有相 當高的可靠度。不再使用人工一一調整各機台,而是事先使用數值方法得到最佳 模式,進而達到節能減碳的目的。
第二章 物理模式
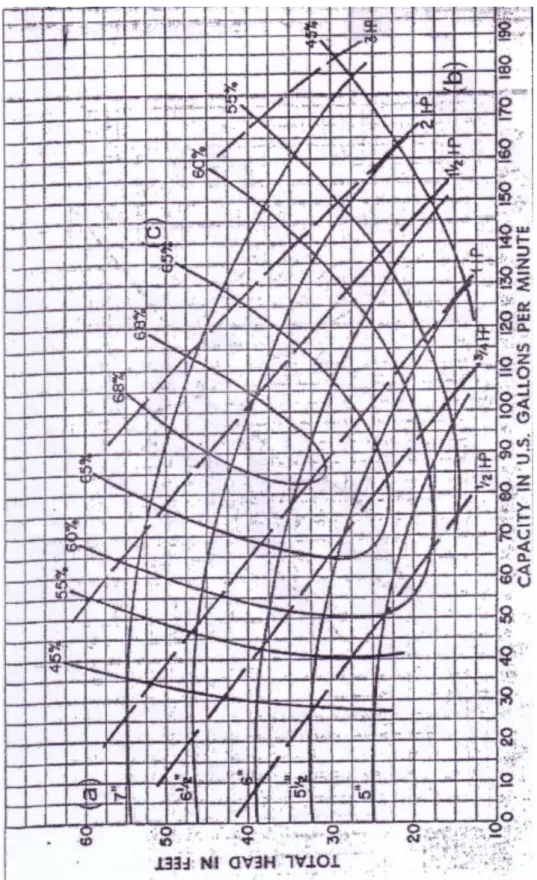
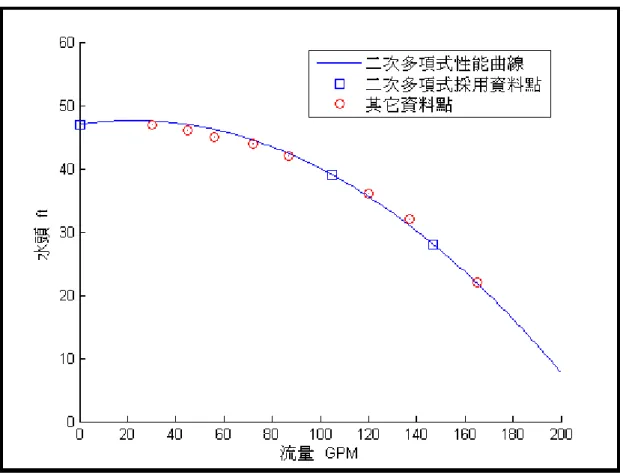
本研究在探討多台離心式風機或泵浦(之後通稱動力源)並聯時,對複雜管路 系統的流量造成的影響,並進一步探討並聯動力源在定壓時的情況。為了模擬實 際管路,先從單一動力源的數值計算進行探討,再推導系統阻抗曲線、操作點、 動力源並聯之性能曲線等相關數學模式,藉此說明單一動力源並無法作龐大流量 的供給,必須採用多機系統,進而求得並聯形態所需之方程式。再來計算方式將 多台不同的動力源等效於單台動力源,求出單台虛擬動力源在系統中所造成的總 流量,再將總流量分配於各台動力源。然而利用這種方法,常常每台動力源所分 配的流量相差甚多,和實際應用等壓的情況亦有所差距,因此本文借助這兩種方 法的比較,探討動力源並聯流量分配的情形。 首先單台動力源之管路系統如圖 2-1 所示,圖中有圓圈○的數字是管路編 號,沒有圓圈的數字是節點(管路交接處)編號,線段代表管路, 代表動力源。 動力源的性能曲線由廠商提供圖示,為了計算上的方便,必須把動力源的性能曲 線用數學式表示。不同型號的動力源,性能曲線亦隨之不同,圖 2-2 為某泵浦在 轉速 1750rpm 的不同尺寸葉扇(impeller)性能曲線(圖上 7〞、6 1/2〞,標示為 a 之 曲線)、等功率線(圖上 2HP、11/2HP,標示為 b 之曲線)與等效率線(圖上 68%、 65%,標示為 c 之曲線)。為了方便計算上的執行,可將性能曲線表示成多項式。 以圖面上葉扇尺寸 6 1/2〞的性能曲線為例,從圖上可取得流量為 0,30,45,56, 72,87,105,120,137,147,165 GPM(加侖/分),泵浦所提供的水頭分別為 47,47,46,45,44,42,39,36,32,28,22 FT(呎,水頭單位),總共 11 個 資料點,也因此多項式可使用的最高次數為 10 次,可寫成
10 0 n n nQ a H (2-1) 有 11 個未知係數(a,0 a,1 a,2... a, 10),因此需要 11 個方程式求解。將已知的 11 個 資料點分別帶入(式 2-1)可得到所需的 11 個方程式,聯立後可寫成1 11 1 11 10 1 0 11 11 10 2 10 2 22 . . . 47 47 . . . 165 . . . 165 165 1 . . . . . . . . . . . . . . . 30 . . . 30 30 1 0 . . . 0 0 1 a a a (2-2) 下標表示該矩陣的行和列。(2-2)為一線性聯立方程組,可使用高斯消去法求解, 得到多項式的係數。由(2-2)可知,有 m 個資料點時,最高次方為 m-1 次。當多 項式的最高次方過大時(如 10 10 165 30 , ),極易求出係數不準確。為了避免上述 的情形,採用二次多項式來表示性能曲線,僅需要圖上的三個資料點。圖 2-3 為 11 個資料點與二次多項式曲線的比較圖,可發現相似性極大。 圖 2-1 為單台動力源的管路系統,共有 9 根管段和 10 個節點(包含流體出入 口與合流點,即所有管段的兩端點)。其中節點 1、2、4、6、7 為支管出口,節 點 9 和 10 為總入口。在管 9 上有一個動力源,圖上的箭頭符號(<)為程式內定計 算所假設的方向,並不代表實際流體流動的方向。整個系統所待求的是各個管段 流量Q ,下標 n 為管路編號,代表不同管路的流量。因為有 9 個未知數n (Q1 , Q2 , ... , Q9),需要 9 個線性獨立方程式求解。利用節點處流量守恆 建立的連續方程式,如節點 3,管 3 的流量等於管 1 和管 2 的流量和。可表示成 (式 2-3) 0 3 2 1Q Q Q (2-3) 同理,節點 5、8、9 可寫出(2-4)、(2-5)和(2-6)三個流量守恆方程式 0 5 4 3 Q Q Q (2-4) 0 8 7 6 Q Q Q (2-5) 0 9 8 5 Q Q Q (2-6) 其它的節點(節點 1、2、4、6、7 和 10)並沒有流量守恆的關係,因此無法寫出可
用來求解的流量方程式。 求解所需的另外 5 個方程式可由能量守恆的概念求得。考慮管 3,兩端的節 點分別為節點 5 和節點 3,若流量從節點 5 流向節點 3,表示節點 5 比節點 3 有 較大的全壓值,而流體流經管 3 會因為摩擦或管路結構造成全壓損失,表示成 3 P ,節點 3 和節點 5 的全壓分別表示成P 和3 P ,則兩節點關係可寫成 5 3 5 3 P P P (2-7) 管 3 的全壓損失P3又可表示成 2 3 3Q K (本章後面會有解說),其中K 表示管 3 的3 全壓損失係數,所以(2-7)可寫成 3 5 2 3 3Q P P K (2-8) 各管路有不同的結構與裝置,所以會有不同的全壓損失係數,以下標區分不同管 段全壓損失係數。(2-8)等號左邊含有未知數Q ,而等號右邊的未知數則為3 P 和3 9 P ,如此一來增加一個方程式,但卻多了兩個未知數。假設所有進出口的全壓 條件已知(也就是節點 1、2、4、5、7 和 10),當流體是從節點 10 流進,流經管 9、管 5、管 3 和管 1,最後從節點 1 流出,利用(2-7)的原理可寫成 PP10P1 (2-9) 其中P為各管段全壓損失與動力源所改變的全壓總合,以數學式表示為 9 9 5 3 1 P P P PS P P (2-10) 其中PS9為離心式流體機械的全壓值,稍後會提到如何處理PS9。將(2-10)代入 (2-9),整理後可寫成 1 1 10 1 3 5 9 9 P P P P P P C PS (2-11) 因為P 和 為已知,因此10 P1 C1為一常數。最後將P換成KQ 的型式,可得到2 1 2 1 1 2 3 3 2 5 5 2 9 9 9 K Q K Q K Q KQ C PS (2-12)
其它的方程式同理可得,分別為 2 2 10 2 2 2 2 3 3 2 5 5 2 9 9 9 K Q K Q K Q K Q P P C PS (2-13) 3 4 10 2 4 4 2 5 5 2 9 9 9 K Q K Q K Q P P C PS (2-14) 4 6 10 2 6 6 2 8 8 2 9 9 9 K Q K Q K Q P P C PS (2-15) 5 7 10 2 7 7 2 8 8 2 9 9 9 K Q K Q K Q P P C PS (2-16) (2-12)~(2-16)的路徑,均從含動力源管段的出口節點(節點 10),走向各個吹出口 節點(節點 1、2、4、6 和 7)。此時方程式共有 9 個,而多一個未知數PS9。 (2-1)式代表離心式流體機械的性能曲線方程式,先前提過用二次多項式來表示已 十分吻合,因此可將離心式流體機械在某固定轉速下的性能曲線寫成 3 9 2 2 9 1 9 S S S S C Q C Q C P (2-17) 其中C 、S1 C 和S2 C 皆為常數,下標 S 表示離心式流體機械。(2-11)式~(2-16)式S3 等號左邊的每一項(除了PS9),均為一全壓損失係數乘上管路流量的平方。因此 為了將PS9併入方程組計算,將(2-15)式利用配方法寫成 1 2 2 3 2 1 2 9 1 2 2 9 1 9 4 ) 2 ( S S S S S S S S S C C C C C Q C C Q C P 1 2 2 3 2 1 2 9 1 4 2 S S S S S S C C C C C Q C 4 2 9 1 S S G C C (2-18) 其中 1 2 9 9 2 S S C C Q G 且 1 2 2 3 4 4 S S S S C C C C 。將(2-18)式代入(2-11)式,整理過後可以 得到 CS1 G92 K9Q92 K5Q52 K3Q32 K1Q12 C1CS4 (2-19)
同理,(2-13)~(2-16)式也可以將(2-18)式代入 CS1 G92K9Q92K5Q52K3Q32K2Q22 C2CS4 (2-20) CS1 G92 K9Q92 K5Q52 K4Q42 C3 CS4 (2-21) CS1 G92 K9Q92 K8Q82 K6Q62 C4 CS4 (2-22) 2 5 4 7 7 2 8 8 2 9 9 2 9 1 S S G K Q K Q K Q C C C (2-23) 此時未知數PS9轉換成未知數G ,同樣多出一未知數9 G ,不過可由(2-16)式的9 配方過程,再取得一方程式 1 2 9 9 2 S S C C Q G (2-24) (式 2-19)~(式 2-23)的K (n=1、2、…、9)均為已知數,此為管路的全壓損失n 係數,這包含兩個部分,一是流體流經管路因摩擦所造成的損失,二是管路系統 中所安裝各式設備(equipment)及配件(fitting),所造成的次要損失(Minor Loss)。 以下將介紹如何處理這部分。 (1) 摩擦損失 流體流經管路會因為摩擦而造成全壓損失,不同材質、管徑和長度的管路損 失,可用 Darcy-Wesbach 公式[3]來計算 2 2 n n n n n V D L f P (2-25) 下標 n 表示不同管路有不同長度(L )、管徑(n D )與材質,在不同的平均速度時n (V ),會有不同的全壓損失。n f 稱為摩擦因子(friction factor),與雷諾數(Reynolds n number, VnDn ,μ為流體黏滯係數,為流體密度)和管路相對粗糙度有關, 可由 Colebrook 的公式[6]求得
) Re 51 . 2 7 . 3 ( log 2 1 10 f D e f Re > 4000 (2-26) 其中
e
為管壁的絕對粗糙度(absolute roughness),單位為長度單位。 D e 稱為相對 粗糙度。由於 Colebrook 求解時較為困難,因此可以用 Altshul-Tsal 方程式[6]來 求得 f 值,為 25 . 0 Re 68 11 . 0 D e f (2-27) 若 f0.018:f f 若 f0.018:f 0.85f0.0028 只要知道相對粗糙度和雷諾數,便可以直接求得 f 值。 將(2-25)的速度項改成流量,可寫成 2 2 ) ( 2 1 n n n n n n n n K Q A Q D L f P (2-28) 而K 即為管路的全壓損失係數,n A 為管路截面積。 n (2) 次要損失(Minor Loss) 管路系統中,常見造成次要損失的原因有彎管(Bend)、風門(Damper)、不同 管路的連接等。次要損失與動壓呈成現正比關係,其通式可寫成 PCcpv,c (2-29) 其中pv,c代表動壓,C 代表損失係數,下標cc
代表連管(connecting tube)。其中動 壓等於 2 2 , n c v V p ,因此(式 2-29)可寫成 2 2 n c V C P (2-30) (i)、彎管(Bend): 實際管路結構中常受限於廠房現場的配置,在同一段管路中常會有許多轉彎 的部分即稱為彎角。如圖 2-4 和圖 2-5 分別為 90 度彎角和其它角度彎角的結構與損失係數。經過彎角的全壓損失為 2 2 n b V C P (2-31) b C 為彎角損失係數,可從圖 2-4 和圖 2-5 上依據不同管路條件得到。V 是該管路n 管內流體的平均速度。因此(2-31)也可以將速度轉換成流量。若一管路有一彎角, 則包括摩擦所造成的全壓損失可寫成 2 2 2 2 2 2 ) 2 1 2 1 ( 2 2 n n n n b n n n n n b n n n n n Q K Q A C A D L f V C V D L f P (2-32) 其中全壓損失係數K 包括因摩擦和彎角所造成的損失。 n (ii)、三管路相接 三管相連接(Wye)分別為主管(main, straight-through),子管(branch)和連管 (common branch)。如圖 2-6 為一主管和連管管徑相同,且子管與主管角度為 30 度的結構圖與損失係數。圖中標示 s 即為主管,b 即為子管,而 c 為連管。從主 管到連管的全壓損失用Pb,c。從主管流經連接處到連管的全壓損失為 2 2 , , c c s c s V C P (2-33) 而從子管流經連接處到連管的全壓損失為 2 2 , , c c b c b V C P (2-34) 其中Cs,c和Cb,c可由圖 2-6 的表格查得。式(2-33)與(2-34)都是乘上連管平均速的 平方,而非主管或子管的。建立方程式時,需要依照經過的路徑來計算三管連接 處所造成的全壓損失。考慮圖 2-1 之路徑管 6→管 5 和管 6→管 4,管 6 為連管, 管 4 為子管,管 5 為主管,比較式(2-21)與(2-22),當兩方程式皆通過節點 6 時, 所造成的全壓損失各不相同。因此建立方程式時,每條路徑各自計算經過節點連 接處時的全壓損失。
(iii)、其它
除了(i)和(ii)之外,尚有風門(圖 2-7)與管路突擴與突縮(圖 2-8)所造成的次 要損失,其公式皆與(2-29)相似,更詳細的資料可以由文獻[6]中找到。
Coefficients for 90。 Elbows r/D 0.5 0.75 1.0 1.5 2.0 2.5 b C 0.71 0.33 0.22 0.15 0.13 0.12
Angle Correction Factors K (Idelchik 1986, Diagram 6-1)
0 20 30 45 60 75 90 110 130 150 180
K 0 0.31 0.45 0.6 0.78 0.9 1 1.13 1.2 1.28 1.4
, deg 20 30 45 60 75 90
b
C 0.08 0.16 0.34 0.55 0.81 1.2
Reynolds Number Correction factors:M/hc
Re 4 10 1 2 3 4 6 8 10 14 K 1.4 1.26 1.19 1.14 1.09 1.06 1.04 圖 2-5 其它角度彎角
Branch Cb,c c b A A / c b Q Q / 0.1 0.2 0.3 0.4 0.6 0.8 1.0 0 -1 -1 -1 -0.9 -0.9 -0.9 -0.9 0.1 0.21 -0.46 -0.57 -0.51 -0.53 -0.54 -0.54 0.2 3.1 0.37 -0.06 -0.16 -0.23 -0.24 -0.28 0.3 7.6 1.5 0.5 0.15 -0.04 -0.06 -0.08 0.4 14 3.0 1.2 0.42 0.19 0.13 0.12 0.5 21 4.6 1.8 0.53 0.24 0.19 0.15 0.6 30 6.4 2.6 0.77 0.35 0.28 0.17 0.7 41 8.5 3.4 0.99 0.42 0.28 0.22 0.8 54 12 4.2 1.2 0.47 0.29 0.25 0.9 58 14 5.3 1.4 0.49 0.29 0.22 1.0 84 17 6.3 1.6 0.49 0.21 0.15 圖 2-6 三管相連接
Branch Cs,c c b A A / s b Q Q / 0.1 0.2 0.3 0.4 0.6 0.8 1.0 0 0 0 0 0 0 0 0 0.1 0.02 0.11 0.13 0.15 0.16 0.17 0.17 0.2 -0.33 0.01 0.13 0.19 0.24 0.27 0.29 0.3 -1.1 -0.25 -0.01 0.1 0.22 0.3 0.35 0.4 -2.2 -0.75 -0.3 -0.05 0.17 0.26 0.36 0.5 -3.6 -1.4 -0.7 -0.35 0 0.21 0.32 0.6 -5.4 -2.4 -1.3 -0.7 -0.2 0.06 0.25 0.7 -7.6 -3.4 -2.0 -1.2 -0.5 -0.15 0.1 0.8 -10 -4.6 -2.7 -1.8 -0.9 -0.43 -0.15 0.9 -13 -6.2 -3.7 -2.6 -1.4 -0.8 -0.45 1.0 -16 -7.7 -4.8 -3.4 -1.9 -1.2 -0.75 圖 2-6 三管相連接(續)
, degrees 0 / D D 0 10 20 30 40 50 60 70 75 80 85 0.5 0.19 0.27 0.37 0.49 0.61 0.74 0.86 0.96 0.99 1.0 1.0 0.6 0.19 0.32 0.48 0.69 0.94 1.2 1.5 1.7 1.8 1.9 1.9 0.7 0.19 0.37 0.64 1.0 1.5 2.1 2.8 3.5 3.7 3.9 4.1 0.8 0.19 0.45 0.87 1.6 2.6 4.1 6.1 8.4 9.4 10 10 0.9 0.19 0.54 1.2 2.5 5.0 9.6 17 30 38 45 50 1.0 0.19 0.67 1.8 4.4 11 32 113 -- -- -- -- 圖 2-7 風門與損失係數
, degrees 1 0/ A A 10 15 20 30 45 60 90 120 150 180 0.06 0.21 0.29 0.38 0.6 0.84 0.88 0.88 0.88 0.88 0.88 0.1 0.21 0.28 0.38 0.59 0.76 0.8 0.83 0.84 0.83 0.83 0.25 0.16 0.22 0.3 0.46 0.61 0.68 0.64 0.63 0.62 0.62 0.5 0.11 0.13 0.19 0.32 0.33 0.33 0.32 0.31 0.3 0.3 1 0 0 0 0 0 0 0 0 0 0 2 0.2 0.2 0.2 0.2 0.22 0.24 0.48 0.72 0.96 1.0 4 0.8 0.64 0.64 0.64 0.88 1.1 2.7 4.3 5.6 6.6 6 1.8 1.4 1.4 1.4 2.0 2.5 6.5 10 13 15 10 5.0 5.0 5.0 5.0 6.5 8.0 19 29 37 43 圖 2-8 管路突擴與突縮損失係數
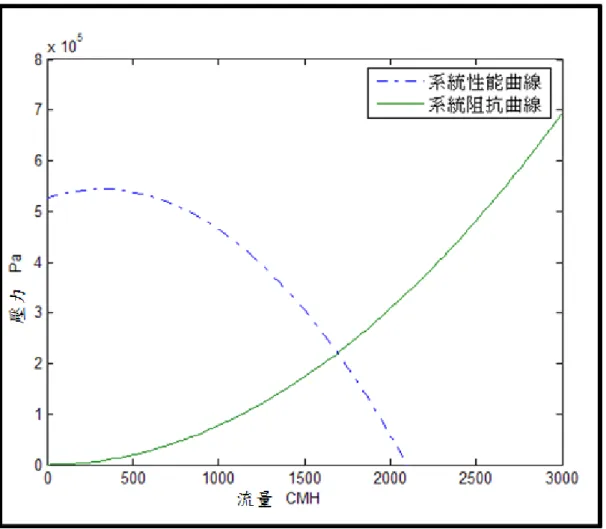
一個複雜的管路系統,若系統設定不變,則系統的全壓損失與總流量的平方 成正比,畫成PQ圖為一條曲線,稱為系統阻抗曲線。可寫成 2 sys sys sys K Q P (2-35)
其中Ksys為固定常數,Q 為系統的總流量,sys Psys為系統的全壓損失。因此在系
統不變的條件下,已知系統的在某流量時的壓力,則可求出系統的阻抗曲線。圖 2-10 為系統阻抗曲線與單台動力源的交叉點,該點所對應的流量與壓力,即為系 統的總流量與系統的全壓損失,因此稱為操作點。在單台動力源的管路系統中, 若動力源的性能曲線和系統阻抗曲線已知,由於系統的全壓損失等於動力源所提 供的壓力,系統的總流量等於動力源的流量,(2-32)代入(2-36)得(2-37) 2 2 3 1 S S S Q C Q C C P (2-36) CS1Qs y s2 CS2Qs y sCS3 Ks y sQs y s2 (2-37) 利用公式法可求得兩曲線的交點(操作點)流量Qsys
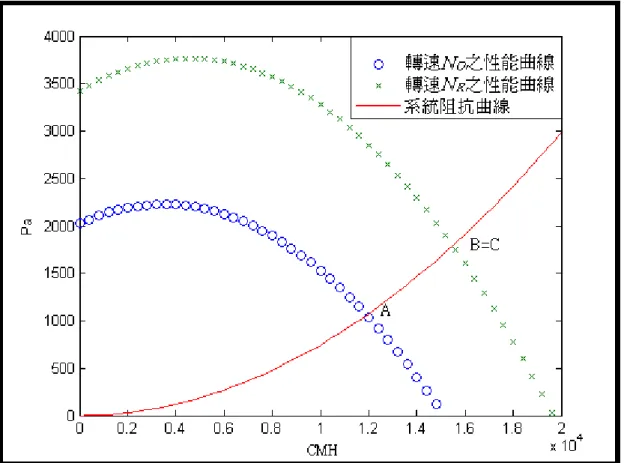
s y s S S s y s S S S s y s K C C K C C C Q 1 3 1 2 2 2 4 (2-38) 某固定轉速之動力源,裝置於管路系統中,流量可由(2-38)求得。若求出的 流量並非所需求,可變更動力源之轉速來調整。動力源的轉速不同時,動力源的 性能曲線會有所不同,操作點也隨之改變。動力源的性能曲線可由相似定理 (Affinity Law)[9]計算,其流量與轉速、壓力與轉速、功率與轉速的關係為: R O R O N N Q Q (2-39) 2 2 R O R O N N P P (2-40) 3 3 R O R O N N BHP BHP (2-41)其中Q表示流量, N 表示轉速,P表示壓力,BHP(Brake Horse Power)表示所 需功率,下標 O 代表原始轉速N 時的狀態,而下標 R 代表變更轉速O NR時的狀 態。圖 2-11 為某離心式流體機械在轉速為N 和O NR的性能曲線之示意圖,圖中 A 和 B 點分別為在固定的系統下,不同轉速時的操作點。(2-35)式可以求得 A、 B 兩點的關係式為 2 2 2 2 B A B s y s A s y s B A Q Q Q K Q K P P (2-42) 這也代表有相異兩點均在系統阻抗曲線上,其關係式必滿足(2-42)之型式。 若直接將 A 點由(2-39)式與(2-40)式計算,把轉速調高至NR,所求得的值為 C, 其關係式可表示為 R O C A N N Q Q (2-43) 2 2 R O C A N N P P (2-44) 將(2-43)式代入(2-44)式 2 2 C A C A Q Q P P (2-45) (2-45)式指出 C 在系統阻抗曲線上,即 B 點和 C 點同一點。也就是已知操作點 A, 即可利用相似定理計算出不同轉速性能曲線與系統阻抗曲線的操作點 B。若 B 點為系統的目標流量與壓力(即QB Qsys和PB Psys),但不知離心式流體機械所 需轉速(NR Nsys)為多少,由(2-35)式可以計算出參數Ksys,可寫成 2 s y s s y s s y s Q P K (2-46) 離心式流體機械轉速N 時的性能曲線方程式如(2-36)式所示,將(2-36)式與(2-46)O
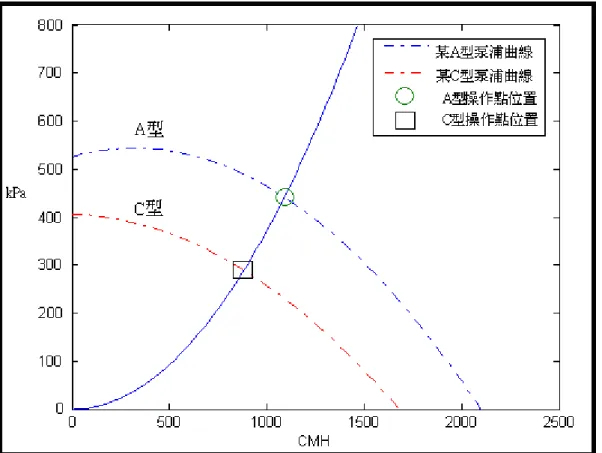
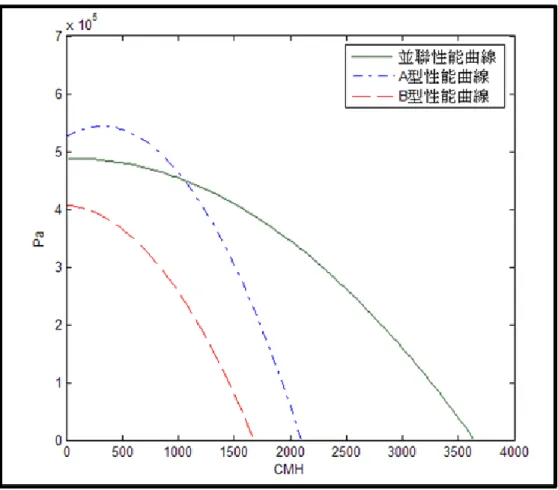
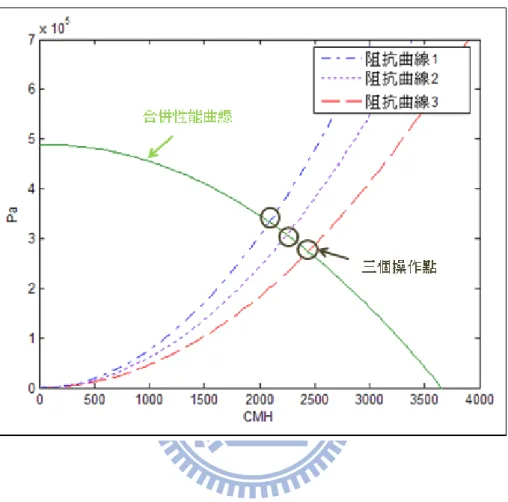
式所需係數代入(2-38)式,求得系統流量QA。再利用(2-39)式求得Nsys A sys O sys Q Q N N (2-47) 將原本的離心式流體機械轉速調至Nsys,即可得到所需的流量。利用(2-39)式和 (2-40)式,離心式流體機械調整轉速後的方程式為 2 3 2 S1 2 2 C sys S sys O S sys sys O sys O C Q N N C Q N N P N N (2-48) 將係數移項整理後可得到 3 2 2 1 2 3 2 2 S1 C S sys S sys S O sys S sys O sys S sys C Q C Q C N N C Q N N C Q P (2-49) 其中CS1 CS1、 O sys S N N C 2 S2 C 和 2 3 S3 C O sys S N N C ,(2-49)式即為變更轉速後 之性能曲線方程式。 而當同樣型號的離心式動力源並聯在一起,性能曲線的流量隨並聯動力源的 數目增加若壓力相同會以倍數增加[11]。但是在不同型號的情況下,這種情形就 不一定。因為不同型號的離心式動力源所屬的性能曲線必不相同,故並聯時操作 點所對應到的各流量和壓力也不一定相同。若要達成倍數成長的條件就是不同型 號的離心式動力源之各性能曲線要趨近相同,且要在正確的操作點(壓力流量兩 者相同)上才會有倍數增長的情況。如圖 2-9 即某動力源在固定轉速時,不同數 目相同泵浦並聯的性能曲線。比較圖面上單台和兩台泵浦並聯的性能曲線,提供 相同壓力的條件下,兩台泵浦並聯所提供的流量是單台的兩倍。同樣的,三台泵 浦並聯在同樣壓力的條件下,提供三倍的流量。而由圖 2-12 兩種不同型號之泵 浦兩者性能曲線差異極大並聯後由於兩者對應操作點不相同則壓力及流量不同 故無法達到倍數關係。而圖 2-13 則是兩種不同型號之泵浦性能曲線接近相同且
兩者操作點也近似相同則壓力及流量也近似相同,故可以達到並聯之後有倍數關 係存在。至於不同形式泵浦並聯之結果,可見合併性能曲線如圖 2-14 所示,綜 合兩泵浦之性能曲線而得其並聯性能曲線,透過改變流道之阻抗而可以得到不同 的操作點數據,如圖 2-15 所示三條阻抗曲線由左至右各段管長分別為 25、20、 15m,因此我們可以得到 3 個不同的操作點,取三個點而可使用前章所說明的二 次曲線近似法,將這些點依序描出而可以得到並聯性能曲線。 考慮圖 2-16 兩台不同型號並聯之系統,每台離心式流體機械的性能曲線分 別為 3 2 2 1 S S S Q A Q A A P (2-50) 以及 PBS1Q2 BS2QBS3 (2-51) 其中A 、S1 A 、S2 A 及S3 B 、S1 B 、S2 B 分別為不同性能曲線之常數。然而此並S3 聯系統共有 11 個流量未知數(Q1、Q2、…、Q11),因此需 11 個線性獨立方程式。 流量守恆方程式為建立在非出入口之節點上,其中 4 個節點(即節點 3、5、8 和 9)與(2-3)式~(2-6)式相同,再多加節點 11 的流量守恆 0 11 10 9 Q Q Q (2-52) 共 5 條流量守恆方程式。能量守恆方程式依之前的原理,只要從某一出入口走向 另一出入口即可,也就是節點 1 分別走向節點 2、4、6、7、01 和 12,節點 2 走 向節點 4、6、7、10 和 12,節點 4 走向節點 6、7、10 和 12,節點 7 走向節點 10 和 12,以及節點 10 走向節點 12。因此在這個系統中,總共可以找出 21 條路 徑。然而剩下所需之方程式只需 6 條,若選擇不當,會造成方程式此線性相依, 解出無限多組解。為了避免這種情況發生,用以下規則找尋最後的方程式。若系 統有 M 台動力源並聯,需要 N 條能量守恆方程式,最方便的能量守恆路徑選法 如下:
步驟 1:先選定某一固定動力源(比如管 10 上的動力源)的出口為起點,走向各個 吸入口節點,可找出 N-M+1 個方程式。 步驟 2:剩下 M-1(即剩下動力源的數量)的方程式,以其它某一動力源(如管 11 的動力源)的出口為起點,走向任一吸入口節點(如節點 1),便可再找到 一條方程式。 步驟 3:若有三台動力源,再以剩下的動力源的出口為起點,同步驟 2 再找出一 條方程式。 這也表示說其中一台動力源,會提供 N-M+1 個方程式,其它動力源各提供 1 方 程式,至於動力源的同型與否並不影響其算法。 故根據以上步驟可以由步驟 1 得到 5 條方程式: 4 1 2 1 1 2 3 3 2 5 5 2 9 9 2 10 10 2 10 1 S S G K Q K Q K Q K Q KQ C A A (2-53) 4 2 2 2 2 2 3 3 2 5 5 2 9 9 2 10 10 2 10 1 S S G K Q K Q K Q K Q K Q C A A (2-54) 4 3 2 4 4 2 5 5 2 9 9 2 10 10 2 10 1 S S G K Q K Q K Q K Q C A A (2-55) 4 4 2 6 6 2 8 8 2 9 9 2 10 10 2 10 1 S S G K Q K Q K Q K Q C A A (2-56) AS1G102 K10Q102 K9Q92 K8Q82 K7Q72 C5 AS4 (2-57) 再根據步驟 2 得到最後一個方程式 4 6 2 1 1 2 3 3 2 5 5 2 9 9 2 11 11 2 11 1 S S H K Q K Q K Q K Q KQ C B B (2-58) 其中G 和10 H11與(2-18)式的原理相同,是由性能曲線配方法得到,因此最後必須 增加的方程式為 1 2 10 10 2 S S A A Q G (2-59) 1 2 11 11 2 S S B B Q H (2-60)
此時如果再添加一方程式,其路徑為節點 12 走向節點 2,方程式為 4 7 2 2 2 2 3 3 2 5 5 2 9 9 2 11 11 2 11 1 S S H K Q K Q K Q K Q K Q C B B (2-61) 將(2-53)式減去(2-54)式,以及(2-58)式減去(2-61)式,都可得到(2-62)式 1 2 2 1 1 2 2 2Q KQ P P K (2-62) 這也代表路徑選擇過多或是不當時,會造成方程式線性相依的問題。以上雙機並 聯需要的方程式,包含 5 個流量守恆方程式(2-3)式~(2-6)式和(2-52)式,6 個能量 守恆方程式(2-53)式~(2-58)式,以及因性能曲線增加的 2 個方程式(2-59)式和(2-60) 式,總共 13 個方程式。這樣就可以計算出並聯系統的流量計算。
同理對於已經可以完整計算不同形式流體機械的流量計算,但達到最省能源 的並聯台數,必須得知系統所需之總功率。離心式流體機械之功率公式為 Ef Z P Q BHP (2-63) 其中BHP代表功率,Q代表流量,P代表壓力,Ef 代表效率,Z代表單位轉 換常數。隨著流量與壓力單位使用的不同,Z值也隨之改變。以一般泵浦而言, 流量的單位為 GPM ,而壓力使用單位為FT ,所以Z值為 3960。從(2-63)式中 可以得知,除了流量與壓力外,效率值Ef 也會影響到功率值的大小。 廠商給的離心式流體機械的資料圖包含等效率曲線,那麼只要知道離心式 流體機械操作時的壓力和流量,則可直接查出效率值。如圖 2-2 之不同直徑泵浦, 像 U 字型之(C)曲線為等效率曲線。若葉片直徑為 7 英吋,在流量 120 GPM 與壓 力 45FT 時,其效率值約為 66%,那麼所使用功率為 2.06HP;若葉片值徑為 6 英吋,在流量 120 GPM 與壓力 27FT 時,其效率值約為 61%,使用功率為 1.34HP。又如圖 1-1 所示泵浦,假使廠商給的資料為在固定及尺寸(10.88 英吋) 轉速下之效率曲線(Ef ,也就是機械效率)或功率曲線(BHP,即制動馬力),當 轉速變更時,其曲線也必定隨之改變,因此無法從查表中求得,只得借助數學轉 換公式逼近。 n R O R O D D Q Q ) ( (2-64) m R O R O D D P P (2-65) k R O R O D D B H P B H P (2-66) 以泵浦而言,其n1,m2,k 3[9];若以風機而言n3,m2, 5 k [7]。文獻[9]提到當泵浦變動直徑與原提供直徑相差愈遠時,其計算求得的 誤差值也愈大,因此變動直徑以不小於原直徑之 70%為原則。文獻[10]提供泵浦 直徑計算的修正圖,如圖 2-17 所示,可以使(2-64)式~(2-66)式所計算的誤差值減
少。其中橫軸代表欲求之直徑比,而縱軸代表修正後計算的直徑比,例如原直徑 O D 為 7〞,提供的流量Q 為 100 GPM ,欲求直徑O DR為 6〞時之流量,實際直徑 比為 0.857,從橫軸找到 0.857 的值,對應縱軸的值約為 0.839,因此要利用(2-64) 式~(2-66)式公式計算時,在直徑比所代入的值應為 0.839,所求之QR為 83.9GPM 。 若廠商給的離心式流體機械的資料圖包含等效率曲線,那麼只要知道離心 式流體機械操作時的壓力和流量,則可直接查出效率值。效率曲線可和性能曲線 一樣,可利用多項式表示。先前性能曲線採用二次多項式表示,是由於能量守恆 方程式流量均為二次式,會比較方便計算。而在效率曲線方面,由於是獨立出來 的計算式,因此可採用更高次之多項示表示。因此效率曲線可寫成
j i i iQ E Ef 0 (2-67) 其中 j代表最高次項,E 為係數。圖 2-18 到圖 2-20 分別是以二次、三次以及四i 次多項式,所呈現圖 1-1 泵浦之效率曲線圖。可以發現二次多項式和三次多項式, 與原資料點有較大的差異,而四次多項式較為相近,這也代表不同之曲線圖,可 以採用較符合之多項式表示達到實際上近似的需求。 以下也是利用(2-64)式到(2-66)式,証明當轉速變更時,其效率曲線的變化情 況。從(2-62)式可得知效率與流量、壓力和功率之相關式 O O O O B H P Z P Q Ef (2-68) 下標 O 代表原轉速為D 。如今將轉速由O D 調成O DR時,效率值EfR為 R R R R B H P Z P Q Ef (2-69) 因為Q 和O QR、P 和O PR以及BHP 和O BHPR必需滿足相似定理,因此將(2-64)式 ~(2-66)式代入(2-69)式得到O k m n O R O O O k m n O R O O R O O R O O R R Ef D D BHP Z P Q D D BHP N N Z P N N Q N N Ef ) ( ) ( 2 (2-70) 因此若Ef 之多項式為 O
j i i O i O EQ Ef 0 (2-71) 所以EfR之多項式應為將(2-70)代入(2-69) i O j i i k m n O R O k m n O R R EQ D D Ef D D Ef
0 (2-72) 最後將Q 轉換成O QR,可得到
j i i R i i R k m n R O j i i i R R O j i i k m n O R R Q EQ D D E Q D D E D D Ef 0 0 0 (2-73) 其中 k m n R O n n D D E E ,而in。 同理轉速變更時,可利用(2-73)式求解。當轉速不同時,其n1,m2,k 3, 求出之EfR為
j i i R i R O i R Q N N E Ef 0 (2-74) 利用以上之效率曲線轉換公式,再配合(2-63)式,即可求出不同轉速(或直徑)時 的功率值。 若功率曲線也為已知,以多項式表示為
j i i O i O SQ B H P 0 (2-75) 因此利用(2-64)~(2-66)式,一樣可求出不同直徑時之功率曲線。將這兩式代入 (2-75)式為
j i i R R O i R k R O Q D D S B H P D D 0 (2-76) 而 in,將(2-76)式整理可得
j i i R k R O i R Q D D S B H P 0 (2-77) 同理轉速變更時,可利用(2-76)式求解。當轉速不同時,其n1,m2,k 3, 求出之BHPR為
j i i R i R O i R Q N N S B H P 0 3 (2-78)第三章 數值方法
由前章物理模式可得到所有管路計算所需的方程式,而怎樣把方程式完整的 解出則要利用數值方法。首先我們考慮如圖 2-14 的管路,計算其效率及功率部 分,公式建立與求解的過程可分為下列六個步驟: (1) 輸入資料:輸入所有管段的相對資料,包含各管段的長度、直徑和粗糙 度、管路元件(風門、合流管和彎管等),工作流體密度與黏滯係數,系 統所有出入口的全壓值,不同形式離心式流體機械性能曲線、效率曲線 和所在管段與流向。 (2) 建立預設流量方向:由於輸入資料中,並沒有給定流向值,在此要先決 定各管段流量的方向性。 (3) 建立方程式:求出連續及能量守恆方程式以及加入性能曲線轉換後的方 程式。 (4) 非線性方程式轉換成線性方程式:將能量守恆所建立的非線性方程組轉 換成線性方程組。 (5) 解線性聯立方程組與誤差設定:利用線性法求解流量未知數,並設定合 理之誤差值,使得流量與各管段壓損值達到收斂條件。 (6) 效率與功率之設定:將計算出的流量在帶入效率曲線方程式與功率式 (2-63)得到功率與效率值。 (1) 輸入資料 輸入的方法採用綜合法(Combined Representation, [5]),由 3 個一維陣列 表示其管路結構的相對位置。考慮圖 2-12 的管路,輸入的 3 個向量 元素對應的節點 1,2,3,4,5,6,7,9,10,11,12 位置向量 T:[1 2 3 6 7 10 11 12 15 18 19 22] 相連接管路向量 AT:[1 2 1 2 3 4 3 4 5 6 7 6 7 8 5 8 9 10 9 10 11 11] 相連接節點向量 TL:[3 3 1 2 5 5 3 4 9 8 8 6 7 9 5 8 11 11 9 10 12 11]T 是位置向量,用來對應每一個節點在其它兩個向量開始的位置。AT 是相 連接管路向量,用來記錄與節點相連接的管路。TL 是相連接節點向量,用來記 錄與節點相連接的節點。如 T 向量第 1 個元素 1 代表在 AT 和 TL 中,與節點 1 有關的資料從第 1 個元素開始,也就是說 AT 向量記錄與節點 1 相連接的管路是 管路 1,TL 向量記錄與節點 1 相連接的節點是節點 3;而 T 向量第 5 個元素就代 表節點 5 相關的資料從第 7 個算起,意即與節點 5 相連接的管路是管 3、管 4 和 管 5,相鄰的節點是節點 3、節點 4 和節點 9。同理,與節點 9 相連接的管路有 管 5、管 8 和管 9,與節點 7 相鄰的節點有節點 5、節點 8 和節點 11,其它的節 點可以依此類推。此外,尚需要輸入每根管路的長度、直徑、粗糙度與工作流量 的密度,用來計算摩擦的全壓損失,粗糙度與管路材質有關。其它元件包括風門, 多管連接的結構或其它會造成全壓損失的元件。除了這些輸入的資料外,尚需動 力源所在的管段、流體推動方向和性能曲線。 (2) 建立方程式 由於綜合法並沒有輸入流體的流向,可依系統的需求假設初始流向,若系統 為排氣系統,則流體從吹出口(圖 2-14 的節點 10 和 12)流向出口點(節點 1、2、4、 6 和 7)。因此我們可以採用樹狀圖的方式,將流向先做初步假設。建立樹狀結構 的步驟為 1. 以最外側離心式流體機械的入口節點(也就是節點 12)為參考起點,將此 點設為目標點(存入於目標點向量中),同時將目標點也存入已搜尋向量。 2. 找出與目標點相連接的節點,判別此節點是否存在於已搜尋向量,若尚 未存在,則將方向設為相鄰節點流向目標點,並將資料記錄下來,反之 則跳過。 3. 此時將有設定方向之相鄰節點,存入下次目標點向量與已搜尋向量中, 待目標點向量內之所有目標點用完,下次目標點向量取代目標點向量。 4. 若已搜尋過向量的節點數目等於管路的節點數則程式結束,否則持續步 驟 2 和步驟 3。
5. 最後判別離心式流體機械之流向是否與所在管段流向相同,如果不同則 更正為離心式流體機械之流向。 以圖 2-14 為例,起始目標點為節點 12,找到相鄰點為節點 11,此點並不存 在於已搜尋向量中,因此管 11 之流量尚未決定,將流量設為節點 12 流向節點 11,也就是管 11 之流向是朝著節點 11。此時設立管段對應節點之矩陣,縱軸為 管段編號,橫軸為節點編號,在矩陣位置(11,12)定義為-1,代表是管 11 流向節 點 12 為負向;在矩陣位置(11,10)為 1,代表管 11 流向節點 11 為正向,其它不存 在之位置,用 0 表示。待方向記錄完成後,將節點 11 設為目標點,存入下次目 標點向量以及已搜尋向量。由於原目標點向量中,只有節點 12,其相鄰管段之 流量全設定完成,因此這時可將下次目標點向量取代原目標點向量,再由新的目 標點向量開始搜尋。新的目標點只有節點 11,此時相鄰節點中,節點 12 存在於 已搜尋向中,所以跳過不計,而節點 10 和節點 9 尚未存在,因此分別將管 9 和 管 10 流向定義完成後,將下次目標點向量更新為節點 9 和節點 10,同時也將兩 節點存入已搜尋向量。此時再更新目標點向量,此時目標點為節點 9 和節點 10, 由於節點 11 已搜尋過,也代表節點 10 找不到下次的目標點,而節點 9 則可找到 節點 5 和節點 8,因此下次的目標點只有節點 5 和節點 8。利用以上的原理,可 一直往下找尋,直到所有節點已被搜尋過後,才算流向設定完成。 以上之步驟為步驟 1 到步驟 4 的過程,其結果為(3-1)式所示 1 -1 0 0 0 0 0 0 0 0 0 0 0 1 -1 0 0 0 0 0 0 0 0 0 0 1 -0 1 0 0 0 0 0 0 0 0 0 0 0 1 -1 0 0 0 0 0 0 0 0 0 0 0 1 -1 0 0 0 0 0 0 0 0 0 0 1 -0 1 0 0 0 0 0 0 0 0 1 -0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 1 -1 0 0 0 0 0 0 0 0 0 0 1 -0 1 0 0 0 0 0 0 0 0 0 0 0 1 -1 0 0 0 0 0 0 0 0 0 0 1 -0 1 (3-1) 若是系統只有單一流體機械,只需執行步驟 1 到步驟 4 即可。但以圖 2-14 之二
機並聯的例子,可發現管 10 流向不合,因此再執行步驟 5,矩陣變為(3-2)式 1 -1 0 0 0 0 0 0 0 0 0 0 0 1 1 -0 0 0 0 0 0 0 0 0 0 1 -0 1 0 0 0 0 0 0 0 0 0 0 0 1 -1 0 0 0 0 0 0 0 0 0 0 0 1 -1 0 0 0 0 0 0 0 0 0 0 1 -0 1 0 0 0 0 0 0 0 0 1 -0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 1 -1 0 0 0 0 0 0 0 0 0 0 1 -0 1 0 0 0 0 0 0 0 0 0 0 0 1 -1 0 0 0 0 0 0 0 0 0 0 1 -0 1 (3-2) 在矩陣位置(10,10)和(10,11)正負號均改變。如此一來,管路系統之流量方向設定 完成。 (3) 建立方程式 當初步流向設定完成時,接著是找出系統所需的方程式。質量守恆方程式可 利用(3-2)式求得,(3-2)式之第 n 行代表節點而第 m 列代表管段 m。因此第 1 行 代表節點 1,可觀察出除了矩陣位置(1,1)不為 0 外,(2,1)到(11,1)均為 0,這也代 表節點 1 是出口或入口節點,不會有質量守恆方程式。而從第 3 行中,發現(1,3)、 (2,3)和(3,3)均不為 0,所以節點 3 有質量守恆方程式,依此方法可找出所有含連 續方程式的節點,並將方程式建立出來。 接著是求出能量守恆方程式,方程式的路徑皆由入口節點走向出口節點,因 此需將出入口節點求出。出入口節點可由(3-2)式中求得,在第 1、2、4、6、7、 10 和 12 行的所有元素中,只有一個元素不為 0,這也代表這些節點為出入口節 點,而節點 10 和 12 不為 0 的元素為-1,代表這些節點為入口節點,而節點 1、2、 4、6 和 7 為不為 0 的元素為-1,代表出口節點。 出入口節點區分完成後,開始著手能量守恆方程式的建立。選取任一出口節 點為起始節點,走向其它入口節點,建立同入口節點數量的方程式,同樣以圖 2-14 為例,就是第一個出口節點要找出兩組方程式。假設起始節點 1,接著利用 (3-2)式找尋節點 1 的上游管段和節點。從第 1 行中的元素中,找出值為 1 之位置