行政院國家科學委員會補助專題研究計畫
□成果報告
■期中進度報告
半導體微影覆蓋誤差先進製程批次控制開發研究(1/2)
計畫類別:□個別型計畫 ■ 整合型計畫
計畫編號:
NSC97-2221-E-009-070-MY2
執行期間:
97 年 8 月 1 日 至 99 年 7 月 31 日
計畫主持人:李安謙 教授
共同主持人:
計畫參與人員:郭子瑋、馬宗廷、謝宗翰
成果報告類型(依經費核定清單規定繳交):■精簡報告 □完整報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計畫、列管計畫
及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年■二年後可公開查詢
執行單位:國立交通大學機械工程學系
中 華 民 國 98 年 5 月 30 日
行政院國家科學委員會專題研究計畫期中報告
半導體微影覆蓋誤差先進製程批次控制開發研究(1/2)
Advanced Process Control: Run-to-Run Control of Lithography Overlay
Process in Semiconductor Manufacturing (1/2)
計畫編號:NSC97-2221-E-009-070-MY2 執行期限: 97 年 8 月 1 日 至 99 年 7 月 31 日 主持人:李安謙 交通大學機械系 Email: [email protected] 共同主持人: 研究人員:郭子瑋、馬宗廷、謝宗翰
一、中文摘要
本計畫為兩年期計畫,整個計畫目標在完成 半導體微影覆蓋誤差先進製程批次控制開發研 究。其發展內容包含:黃光微影製程(Lithography Overlay Process)之批次控制(Run-to-Run Control) 控制器開發,第一年研究首先將針對微影製程情 況為:單一機台、單一產品以及單一製程(Layer) 之製程干擾開發一套適應性干擾觀測器(Adaptive Disturbance Observer)並上機實驗驗證;此外,在 第二年擬對於黃光微影混貨(Mixed Product)製程 (多部機台、多樣產品及多道製程),延伸第一年 計畫所開發之製程控制理論與方法,建構一套以 機台為基底之適應性干擾估測器(Tool-based Adaptive Disturbance Estimation, TBADE),並且於 半導體廠內實作及驗證。應用本計畫所開發之成 果,將預期達成減少人力資源浪費、降低重工率、 減少晶圓在製造過程中的損壞,進而提高產品良 率、增加產量以及技術之提升。 在今年計畫中,對於微影製程首先探討單一 機台、產品以及曝光層的情況,以便分析製程特 性,並對其開發一套適應性干擾觀測器,使其觀 測器能夠隨著製程特性改變時,自我調適,以確 保製程之穩定。 關鍵詞:先進製程控制、批次控制、覆蓋誤差、 微影、適應性干擾估測器、混貨、TBADEAbstract
This is a two-year project. The aim of the whole
project is to develop an Advanced Process Control (APC): Run-to-Run (RtR) Control of Lithography Overlay process in semiconductor manufacturing. The content involves the following subjects:
Run-to-Run process control using adaptive
disturbance observer for one tool, one product and one layer in lithography overlay processes for the first year, and the Tool-based Adaptive Disturbance Estimation (TBADE) for lithography overlay control process for mixed product, multiple tools, products and layers for the second year. All of these research results will be implemented and verified in the semiconductor fabrication company. By applying the results of this project, we expect that the human resources, the rework rate and the damage of wafers during processing can be reduced, and meantime the product yield, throughput and the productive techniques can be improved.
The focus of this year will develop a lithography overlay process controller. Considering the overlay processes characteristics, we constructed an adaptive disturbance observer which can tune the model coefficients itself as well as observing the processes disturbance being changed and also generate a new recipe for the process input to improve the response characteristics.
Keywords: Advance Process Control, Run-to-Run,
Lithography Overlay, Adaptive Disturbance Observer, Mixed Product, TBADE
二、計畫緣由及目的
短小、多功能的方向持續發展。因此,導致半導 體製程的複雜度不斷增加,製程控制也愈趨困 難。在半導體製程中,有幾百個製程步驟的情況 下,穩定的製程就顯得格外重要。而良率的提升, 不但可以減少檢測成本,及重工、修復等不必要 成本,更重要的是品質的提升,增加了產品形象 及競爭優勢。所以,當半導體的市場愈形激烈時, 如何改善製程的品質,以提高晶圓的良率,已成 為晶圓廠最重要的課題之一,而製程控制技術即 提昇品質的關鍵因素之一。 先進製程控制結合了統計製程管制與回饋控 制(Feedback control),如圖 1 所示,利用過去製程 的資料來預測下一批製程的參數設定,可以降低 因為機台老化、化學品的消耗、周圍環境條件的 改變(如溫度、溼度)所造成的製程變異,因此先 進製程控制是未來製程控制的發展趨勢。 對所有半導體製程而言,微影製程的技術是 決定晶片線寬尺吋是否能持續縮小最重要的關鍵 之一,而微影製程的穩定性亦是相對的重要。因 此本計畫主要目的是設計一套適用於微影製程之 覆蓋誤差(Overlay Error)的先進製程控制方法,藉 以改善並增進微影製程之穩定性,更可進一步提 供下一世代之微影製程的控制基礎。
三、研究方法
干擾觀測器透過所設計的Q -filter,使控制器 具有即時補償製程干擾的能力;適應性控制則透 過所設計的參數調整律,能作模型參數的調變, 藉由調變模型參數來提升系統的工作效能。本計 畫第一年目的是結合干擾觀測器和適應性控制, 發展出適應性干擾觀測器,藉由參數調整律來更 新系統增益與Q -filter 係數,使得系統存在模型 誤差與面對各種型態的干擾時,更能穩健的運 行。設計一階Q -filter 時,透過數學演算法,證 明在不同型態的干擾下,參數的收斂行為;並計 算出在不同型態的干擾下,Q -filter 所對應的最 佳係數值。設計二階Q -filter 時,將干擾觀測器 結合單一神經元,透過類神經網路學習法則,用 以尋求二階Q -filter 係數較佳的起始狀態,以解 決二階Q -filter 係數會因為初始值選擇不當而造 成效能不彰的問題。並透過模擬各種型態的干擾 輸入,進一步驗證數學理論與展現此控制方法的 控制能力及其效益。最後,利用半導體廠內所提 供的微影製程歷史資料,針對 Overlay 所建立的 模型與產生的干擾,透過適應性干擾觀測器的模 擬控制,驗證控制器的可行性。 Run-to-Run 干擾觀測器架構 考慮一個單輸入單輸出(SISO)的線性靜態模 型如下[1]: ( ) ( ) ( ) y k pu k d k (1) 其中 ( )y k 為系統輸出值, ( )u k 為系統輸入 值,p是系統增益, ( )d k 為製程干擾,k表示批 次。架構如圖 2 所示。基於批次控制下之 Run-to-Run (RtR)干擾觀測器架構,因此將有 unitdelay operatorz1在迴路中與Q -filter 合併在一
起,並且有別於任何其它外加的 delay 項。則輸 出轉移函數則可表示為 (1 ) ( ) ( ) ( ) n n n n n n n p Q p y T d p p p Q p p p Q pQ n p p p Q (2) 同樣地,若在低頻時設計Q1,輸出可表示為 ( ) ( ) y k T n k 。 Q-filter 設計架構 半導體製造屬於批次過程,所以將根據離散 系統下設計干擾觀測器架構,Q -filter 也同為離 散架構。 一階 ( )Q z 定義 假設一階 Q(z)形式如下: 1 1 ( ) b Q z z a (3) 即 1 1 ( ) b z Q z z a ,其中a1與b1為所要調整的參 數。已知Q -filter 設計需滿足直流增益等於 1,即 1 1 1 lim 1 z b z a 。所以a1、b1係數之間要有所限制, 即 1 1 1 b a (4) 由此可知,在一階Q -filter 設計中,只有一個係 數供調整。在本計畫中利用終值定理(Final Value Theorem),探討在干擾觀測器控制架構下,位移 及漂移干擾對系統輸出轉移函數的影響。 在不考慮量測雜訊的情形下,將輸出轉移函 數改寫為 (1 ) 1 ( 1) 1 ( 1) Q y T d Q Q (5)
其中 n p p ,將(3)式代入(5)式中,並且分別計算 當干擾為位移和漂移干擾時,輸出值所對應的終 值。 1. 位移干擾( ( ) 1 z d z z )對系統輸出的終值: 1 1 1 ( ) lim(1 ) ( ) 0 1 ( 1) ( ) z Q z z d z Q z (6) 2. 漂移干擾( ( ) 2 ( 1) z d z z )對系統輸出的終值: 1 1 1 1 ( ) lim(1 ) ( ) 1 ( 1) ( ) (1 ) z Q z z d z Q z a (7) 由(6)式和(7)式可知一階Q -filter 可以完全補償位 移干擾,但是對於漂移干擾,系統輸出卻存在偏 移量。因此,必須再設計一更高階數的Q -filter 以補償漂移干擾。 二階 ( )Q z 定義 假設二階 Q(z)形式如下: 1 2 2 1 2 ( ) b z b Q z z a z a (8) 直流增益同樣地需等於 1,因此係數a1、a2、b1 和b2有所限制如下: 1 2 1 1 2 b b a a (9) 其次討論二階Q -filter 在位移和漂移干擾情形 下,終值分別為: 1. 位移干擾( ( ) 1 z d z z )對系統輸出的終值: 1 1 ( ) lim( 1) ( ) 0 1 ( 1) ( ) z Q z z d z Q z (10) 2. 漂移干擾( ( ) 2 ( 1) z d z z )對系統輸出的終值: 1 2 1 1 2 2 2 1 1 1 2 2 1 ( ) lim( 1) ( ) 1 ( 1) ( ) [ ( ) ( )] lim { [ ( 1) ] [ ( 1) ]}( 1) z z Q z z d z Q z z a b z a b z a b z a b z (11) 為了能完全的補償漂移干擾,使終值為零,係數 1 a 、a2、b1和b2必須滿足以下二個限制: 1 1 2 b a 2 2 1 b a (12) 根據以上設計,在二階 Q-filter 設計中,共有二個 係數可供調整,將(12)式代入(8)式可改寫為 1 2 2 1 2 ( 2) ( 1) ( ) a z a Q z z a z a (13) 如此二階Q -filter 便能同時消除位移和漂移干擾 的影響 適應性控制 在適應性控制法則部分,本計畫是利用遞迴 最小平方法來達成估計參數的目的。以下將介紹 二種常見的參數估計法[2]-[3] 1. 遞迴最小平方演算法 定義一成本函數(cost function)為
2 1 1 ˆ ˆ ( , ) ( ) ( 1) ( ) 2 k T i J k y i i i
(14) 利用此成本函數作為估計參數的準則。為了最小 化成本函數,運算可得以下參數調整律:
ˆ( ) ˆ( 1) ( ) ( ) ˆT( 1) ( ) k k K k y k k k 1 ( ) ( ) ( ) ( 1) ( ) T( ) ( 1) ( ) K k P k k P k k I k P k k
1 ( ) ( 1) ( ) T( ) ( 1) ( ) T( ) ( 1) P k P k I k I k P k k k P k (15) (15) 公 式 即 為 遞 迴 最 小 平 方 (Recursive Least-Squares)演算法。其中 ( )P k 為 ( ) k 之共變異數矩陣(covariance matrix) 之逆矩陣(inverse matrix)。 2. 遺忘因子遞迴最小平方演算法 定義成本函數如下:
2 1 1 ˆ ˆ ( , ) ( ) ( 1) ( ) 2 k k i T i J k y i i i
(16) 稱為 forgetting factor,為介於0 ~ 1的值。可得 參數調整律如下:
ˆ( ) ˆ( 1) ( ) ( ) ˆT( 1) ( ) k k K k y k k k 1 ( ) ( ) ( ) ( 1) ( ) T( ) ( 1) ( ) K k P k k P k k I k P k k
1 1 ( ) ( 1) ( ) T( ) ( 1) ( ) T( ) ( 1) P k P k I k I k P k k k P k (17) (17)式為 Recursive Least-Squares with Forgetting Factor 演算法。根據(17)式參數調整律,最近的時 態的資料給予權重為 0 1 ,即完全採納此資料 的訊息,而n 步之外的舊資料權重即為n ,即資 料被採納的比例就下降。若選擇為 1,則為一 般 RLS 演算法 參數收斂性
探討適應性控制參數的收斂行為時,本計畫 利用兩個重要的定義,分別是Lyapunov 穩定性[2], [4]-[6]及持續激發(Persistent Excitation, PE)條件 [3]。以下將介紹其原理。 1. Lyapunov 定理 考慮一個離散線性非時變系統 ( 1) ( ) x k Ax k (18) 其中 ( )x k 為系統狀態,A為方陣。定義一個二次
式(quadratic form)的正定 Lyapunov 函數
( ( )) T( ) ( ) V x k x k Px k ,在離散系統中,利用差分方 程式 V V x k ( 1)V x k( ) 討論其穩定度。 對於一個零輸入系統x k( 1) Ax k( ) ( 1) ( ) V V x k V x k ( 1) ( 1) ( ) ( ) T T x k Px k x k Px k Ax k( )TPAx k( ) xT( )k Px k( ) ( ) ( ) ( ) ( ) T T T x k A PAx k x k Px k
( ) ( ) ( ) ( ) T T T x k A PA P x k x k Qx k (19) 對於一個線性非時變系統,系統漸進穩定的充要 條件為對任意選擇正定矩陣QQT 0 存在滿足 (19)式的特殊解正定矩陣PPT 0,來滿足 0 T A PA P 或是A PA PT Q,即代表矩陣A的 特徵值小於 1,為穩定系統。2. 持續激發(Persistent Excitation, PE)條件
考慮一個有限脈衝響應(finite impulse
response, FIR)模型且 ( )u k 為平穩型(stationary)訊
號,可表示如下: 1 2 ( ) ( 1) ( 2) ( ) ( ) n T y k b u k b u k b u k n k (20) 1 2 T n b b b ( )k u k( 1) u k( 2) u k( n)T 其中輸入訊號 ( )u k 將決定參數的收斂性。輸入訊 號被稱為具有階數(order) n 的持續激發(PE)條 件,需滿足以下關係: 定義一個輸入訊號的經驗共變異矩陣(empirical covariance)Cn: (0) (1) ( 1) (1) (0) ( 1) (0) n c c c n c c c n c C (21) 其中Cn為一個n n 方陣,Cn方陣中每一個元素 定義如下: 1 1 ( ) lim ( ) ( ), 0 ~ 1 k k i c j u i u i j j n k
(22) 若Cn為n n 的非奇異(nonsingular)正定矩陣,則 輸入訊號 ( )u k 即為滿足階數n 的持續激發條 件。亦即一個系統有n 個參數需要估計,則輸入 訊號至少要滿足 PE 階數n ,才能使n 個系統參 數收斂至真實值。 適應性干擾觀測器。 RtR DOB 雖可補償干擾,但是必須在製程干 擾模型與模型誤差已知的情形下,才能設計出最 佳的控制參數;而一般的適應性控制在系統有外 來干擾時,常常會影響參數收斂的正確性。所以 二種控制方法皆有其優缺點,因此將結合上述二 種控制法則,發展一控制架構,稱之為適應性干 擾觀測器(Adaptive Disturbance Observer, ADOB)。在本計畫所建立的控制架構中,主要有二個 重要的系統參數,分別是Q -filter 的係數和系統 增益值,適應性控制正是要調整這二種重要的參 數。結合前述之 RtR DOB 架構與適應性控制, 可得適應性干擾觀測器控制方塊圖,如圖 3 所示。 根據所設計的適應性干擾觀測器,輸出轉移 函數改寫為: ˆ (1 ) ˆ ( ˆ) ˆ ( ˆ) p Q p y T d p Q p p p Q p p (23) 在 ADOB Q-filter 部分可分為一階與二階之情 況,以下分別詳述之。 1. 一階 Q-filter 干擾適應性控制器設計 考慮一階Q -filter 形式((3)式),經由推導之 後,可得以下參數調整律: ˆ( )k ˆ(k 1) K k e k( ) ( ) 1 ( ) ( ) ( ) ( 1) ( ) T( ) ( 1) ( ) K k P k k P k k I k P k k
1 ( ) ( 1) ( ) ( ) ( 1) ( ) ( ) ( 1) T T P k P k I k I k P k k k P k (24) 其中 ˆ ( ) ( ) [ ( ) ( 1) ( )] ( 1) ( ) T T T e k y k T p k k k p k k (25) 1 2 3 ˆ( 1) ˆ( 1) ˆ ( 1) ˆ ( 1) T k k k k (26)ˆ ˆ ( ) ( 2) ( 2) T k T d k k (27) (24)式即為適應性干擾觀測器所利用的參數調整 律。最後利用上述的參數調整律與 1 1 1 2 3 ˆ ˆ 1 ˆ ˆ ˆ ˆ ˆ ˆ T T a b p p p 的關係式,可估計 出系統增益 ˆp 和Q -filter 係數ˆa1,ˆb 。 1 2. 二階 Q-filter 干擾適應性控制器設計 考慮二階 Q-filter 形式((8)式),其參數調整律 經由推導後形式如下: ˆ( )k ˆ(k 1) K k e k( ) ( ) 1 ( ) ( ) ( ) ( 1) ( ) T( ) ( 1) ( ) K k P k k P k k I k P k k
1 ( ) ( 1) ( ) ( ) ( 1) ( ) ( ) ( 1) T T P k P k I k I k P k k k P k (28) 其誤差函數和參數誤差分別為 ˆ ( ) ( ) [ ( ) ( 1) ( )] ( 1) ( ) T T T e k y k T p k k k p k k (29) ˆ( 1)k (k 1) (30) 利用所定義的誤差函數與參數誤差,代入(28)式 參數調整律中,更新估計參數ˆ,可估計出下一 步的ˆp,ˆa1,ˆa2,ˆb1,ˆb2。 然而,設計二階Q -filter 目的是為了消除漂 移干擾,根據前述,可知當二階Q -filter 滿足係 數限制b1 a1 2,b2a21時,可使漂移干擾對 系統輸出的終值為零,所以需加入係數限制以改 寫參數調整律。因此ˆ( 1)k 與( )k 加入限制條件 後其形式為: 1 2 1 2 3 ˆ ˆ 1 ˆ( 1) ˆ( 1) ˆ( 1) ˆ( 1) ˆ ˆ ˆ T T a a k k k k p p p (31) ˆ ˆ ˆ ˆ ( ) 2 ( 2) ( 3) ( 2) ( 2) ˆ ˆ ( 3) ( 3) T k T k k d k k d k k (32) 估計參數由 5 個變為 3 個,決定ˆa1,ˆa2後即可求 得ˆb1,ˆb2。將所定義的估計參數 ˆ( 1)k 與( )k 向 量代入(28)式參數調整律中,即可得到所欲估計 的參數ˆp,ˆa1,ˆa2。3. Single Neuron Based 干擾觀測器
針對製程有漂移干擾情形下,結合干擾觀測
器與單一網路神經元,使 DOB 具備類神經網路 的學習功能,以提供適應性干擾觀測器的更精確 之起始狀態。
類神經網路學習機制[7]
考慮二階Q -filter time domain 形式:
1 2 1 2 ˆ( ) ˆ( 1) ˆ( 2) ˆ( 1) ˆ( 2) d k a d k a d k b k b k (33) 差分形式的Q -filter 輸出d kˆ( )為 ˆ( ) ˆ( ) ˆ( 1) d k d k d k 1 ˆ( 1) 2 ˆ( 2) 1 ˆ( 1) 2 ˆ( 2) a d k a d k b k b k (34) 將以差分後的 DOB 訊號作為類神經的輸入訊 號, ( )Q z 係數a1,a2,b1,b2作為類神經的加 權係數。輸入訊號可表示如下 1 2 3 4 ˆ ( ) ( 1) ˆ ( ) ( 2) ˆ ( ) ( 1) ˆ ( ) ( 2) x k d k x k d k x k k x k k (35) 加權係數則表示如下 1 1 2 2 3 1 4 2 a a b b (36) 則d kˆ( )即為神經元輸出 ( )z k ,則神經元數學模 型表示如下 4 1 ( ) i i i z k x
(37) 藉由神經網路訓練方法,學習神經元加權係數, 進而求得二階 ( )Q z 係數。 類神經網路更新機制[7] 本計畫中之 single neuron 利用監督式學習演 算法建立更新加權係數的演算法。定義一成本函 數如下 2 1 ( ) 2 J Ty k (38) 為了最小化成本函數,減少輸出值與目標值的誤 差,利用 gradient descent method 求得類神經學習 演算法為 i i i J (39) 其中利用連鎖律求 i J ,可得學習演算法為 ˆ ˆ i i i i i J y d T y x y d (40)
整理以上各式,可得 single neuron based DOB 演 算法為 4 1 1 1 1 1 2 2 2 2 3 3 3 3 4 4 4 4 ˆ( ) ˆ( 1) ( ) ( ) ( 1) ( ) ( ) ( ) ( 1) ( ) ( ) ( ) ( 1) ( ) ( ) ( ) ( 1) ( ) ( ) ( ) i i i d k d k k x k k k T y k x k k k T y k x k k k T y k x k k k T y k x k
(41) 其所對應的控制架構圖 4 所示,其中 single neuron based DOB 的控制流程由圖 5 所示。此設計原則 乃是針對漂移干擾下,尋找適應性干擾觀測器的 起始狀態。因此為了使 single neuron based DOB同樣的能補償漂移干擾,需將 ( )Q z 係數限制考慮 其中,將(41)式改寫為 2 1 1 1 1 1 2 2 2 2 ˆ( ) ˆ( 1) ( ) ( ) 2 ˆ( 1) ˆ( 2) ( 1) ( ) ( ) ( ) ( 1) ( ) ( ) ( ) i i i d k d k k x k k k k k T y k x k k k T y k x k
(42) 其 中 輸 入 訊 號 x1 d kˆ( 1) ˆ(k1) , 2 ˆ( 2) ˆ( 2) x d k k ;加權係數與Q z( )係數 關係為1 a1,2 a2。當求得係數a1,a2 時,由於係數限制之故,即可同時計算出b1和 2b。而 single neuron 目的為提供二階Q -filter 係數
起始狀態,所以使用 single neuron 過程並無調變 估計增益 ˆp 。
透過 single neuron based DOB 架構,經由學 習製程干擾特性,提供適應干擾觀測器的起始狀 態,以減少因為人工給予不良的初始值,而造成 系統效能不彰。
四、目前成果
根據半導體廠所收集的歷史資料,定義歷 史資料中輸入參數為 uhis,輸出量測值為 yhis,將 每一批次 yhisuhis 所得到的值視為該批次的製 程干擾項 dhis,再將這些干擾值依批次加入控制 系統內,以此來檢驗控制器的效能。 為了比較模擬的結果,將採用業界常用的 pk C 作為各個參數製程能力的指標來判斷製程的 效能。Cpk的計算方式如下: LSL USL min , 3 3 pk C (43) 其中 USL 及 LSL 代表製程上下限,及 代表 輸出值的平均值與標準差。然而,若只利用Cpk指 標作為判斷製程能力尚且不夠完整。由Cpk公式 可發現Cpk只能解釋為系統輸出變異程度,並無 將輸出值與目標值之間的偏移考慮其中。因此利 用另一個統計製程指標Cpm: 2 2 6 ( ) pm USL LSL C T (44) 其中T 為目標值。因此Cpm除了考慮輸出變異 ,同時也考慮了目標值T 與輸出平均值值之 間的 bias。故在此次黃光製程模擬中,同時以Cpk 與Cpm值作為評斷效能的指標。兩項指標越大則 代表控制器的效能越好。 此次模擬主要選定兩組單一個機台,單一個 產品,單一 layer 歷史製程資料進行模擬。第一組 為 Tool 4 機台,Product A,Layer C 的歷史資料。 模擬主要是比較適應性 DOB、固定參數 DOB 以 及歷史資料彼此效能的優劣,藉此突顯即時調整 參數的好處。主要有四個控制器,分別是一階Q -filter DOB(簡稱為 1st DOB),一階Q -filter
Adaptive DOB(1st ADOB),二階Q -filter DOB(2nd
DOB)和二階Q -filter Adaptive DOB(2nd ADOB)。
由於資料筆數太少,所以並無將 single neuron + 2nd ADOB 的控制方法加入製程模擬中。另外,在 設計一階Q -filter 時,若干擾型態為隨機非平穩 型干擾,將可能使得系統輸出偏離目標值且輸出 變異發散,所以 1st ADOB 加入係數限制以確保在 微影製程干擾的模擬下,控制器能穩健運行,2nd ADOB 也同樣加入係數限制進行模擬。各控制器 參數如表 1 所示。由表 1 可知,由於假設真實系 統增益為 1,而估計系統增益pˆ1,故模型誤差 1 ,所以藉由減少模型誤差以增進效能的好處 在製程資料模擬無法實現出來。 圖 6 為各個控制器在相同的歷史資料下進行 模擬,得到的Cpk值所繪成的長條圖,圖中由左 而右依序為紫色代表歷史資料計算得到的Cpk 值,以 HIS(History)簡稱,而歷史資料並非完全無 控制,是利用 MA(3)的方法進行補值;藍色為 1st DOB 模擬結果之Cpk值;綠色為 2nd DOB 模擬結 果之Cpk值;紅色為 1st ADOB 模擬結果之Cpk
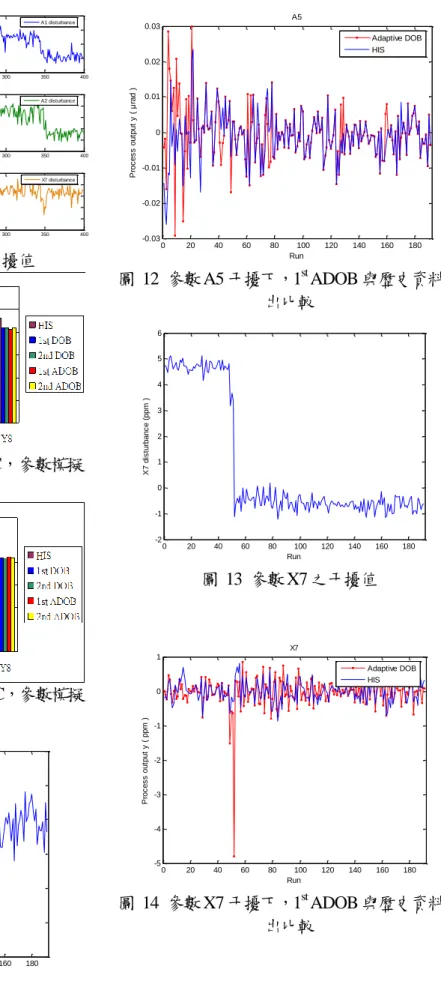
值;’黃色代表 2nd ADOB 模擬結果之Cpk值。圖 7 亦然。由圖 6 與圖 7 可知,紅色部分 1st ADOB 控制器效能比起其他架構較佳,而 2nd ADOB 效 能不顯著是因為微影製程的 10 個參數無明顯漂 移的現象。 其次探討在 1st ADOB 控制架構下,微影製程 的干擾訊號對控制效能的影響。從圖 6 和圖 7 可 知,在 1st ADOB 控制下,參數 A1,A2 和 X7 效 能與固定參數 DOB 相比,無明顯改善,這是由 於這三種參數的干擾訊號型態,傾向非平穩型干 擾之故,圖 8 即為參數 A1,A2 和 X7 的干擾訊 號,由於非平穩干擾不滿足 PE 條件,以致效能 提升不顯著。而其餘參數效能改善較顯著是因為 干擾型態較接近平穩型干擾,能逼近使誤差減小 的真實參數。 接下來選定另一筆資料:Tool 5 機台, Product B,Layer C 的歷史資料進行模擬。其各參 數Cpk與Cpm長條圖如圖 9 與圖 10 所示。由圖 9 與圖 10 可知,除了 A1,A2,A4 和 Y7 有些許改 善外,其餘參數相較於歷史資料的Cpk值與Cpm則 較低。為了分析效能偏低原因,首先探討參數 A5 的干擾型態,如圖 11 所示。 圖 12 為 1st ADOB 與歷史資料的比較,可以 看出在系統暫態時,干擾值的變異過大,導致控 制器效能不彰,原因為來自前層的變異過大,可 能為 CMP 或是蝕刻製程所造成[8];且歷史資料 中,得知有許多人為因素的介入調變,歷史資料 並非只有 MA(3)的方法進行補值。種種因素下使 得模擬結果不能正確的反應製程現況,導致 1st ADOB 效能較差。參數 B5Cpk偏低的原因與 A5 相同。再來探討參數 X7 的干擾項,如圖 13 所示。 由於長時間無 Run 此貨的緣故,導致圖 13 中第 52 批次與第 53 批次間隔時間超過 2 個月,半導 體廠內進行 Pilot 導致製程參數發生相當大的改 變,且廠內未將 Pilot 後較差的輸出值紀錄於歷史 資料中,導致控制器的Cpk值低於歷史資料。 圖 14 即為 1st ADOB 與歷史資料的輸出比 較,由於這筆跳點並未反映在歷史資料的輸出 上,導致控制器效能較差。參數 Y8Cpk值偏低的 原因與 X7 相同,都有不正常的跳點產生。 目前結果討論: 由以上二筆資料模擬可知,第一筆資料的整 體效能優於第二筆資料,這是因為第一筆資料:
Tool 4 機台,Product A,Layer C 歷史資料較為連 續,無長時間沒有 run 貨的情形和較少人為因素
的介入,所以資料型態就較為平穩,1st
ADOB 對 於系統效能的改善較為顯著。反觀第二筆資料: Tool 5 機台,Product B,Layer C,由於長時間無 run 此貨或是缺少前道製程的資訊以及人為介入 等種種因素,無法反映真實製程現況,導致控制 器多個參數的效能比歷史資料還差。 若不考慮跳點,人為介入和其他資料點異常 等現象,所有的參數資料就短期而言,比較偏向 平穩型干擾的型態,由於 1st ADOB 參數收斂的特 性,若微影製程套用此控制架構,製程效能相信 將有所改善。
五、預期成果
今年度計畫成果如下列所示: (1) 已分析黃光製程之特性。 (2) 建立微影製程覆蓋誤差之製程模型。 (3) 完成Run-to-Run干擾觀測器架構。 (4) 完成適應性干擾觀測器架構及其理論推導。 (5) 針對製程有漂移干擾情況時,完成Single Neuron Based干擾觀測器架構。 (6) 建立一套完整黃光微影之單一機台、單一產品 以及單一曝光層先進製程控制機制。六、文獻回顧
[1] 謝明宗,干擾觀測器架構應用在半導體製造批次控 制,國立交通大學機械工程學系碩士論文,2007。 [2] P. A. Ioannon and J. Sun, Robust Adaptive Control. UpperSaddle River, NJ: Prentice-Hall, 1996.
[3] L. Ljung, System Identification: Theory for the User. Englewood Cliffs, NJ: Prentice-Hall, 1987.
[4] G. Tao, Adaptive Control Design and Analysis. New York: Wiley, 2003.
[5] E. Mosca, Optimal, Predictive, and Adaptive Control. Englewood Cliffs, NJ: Prentice Hall, 1995。
[6] F. Ding , Y. Shi and T. Chen, “Performance analysis of estimation algorithms of non-stationary ARMA processes,”
IEEE Trans. Signal Process., vol. 54, no. 3, pp. 1041–1053,
Mar. 2006.
[7] C.-T. Lin and C. S. G. Lee, Neural Fuzzy Systems Englewood Cliffs, NJ: Prentice-Hall, 1996.
[8] 張仲豪,以卡曼濾波器及最小變異控制器實現微影製 程控制,國立交通大學工學院半導體材料與製程產業 研發碩士專班碩士論文,2007。
六、圖表
表 1 控制器相關設定
1st DOB 2nd DOB 1st ADOB 2nd ADOB 控 制 器 參 數 1 1 -filter: 0.5 n p Q a 1 2 1 -filter: 1.49 0.5 n p Q a a 1 ˆ 1 -filter: ˆ (0) 0.5 p Q a 1 2 ˆ 1 -filter: ˆ (0) 1.49 ˆ (0) 0.5 p Q a a 圖 1 APC 系統控制流程圖 _ + ( ) y k + _ + + + + p ( ) d k 1 n p T ( ) n k ( ) u k ˆ( )k ˆ( 1) d k 1 z Q z( ) ( ) Q z ˆ( ) d k 圖 2 等效 Run-to-Run 干擾觀測器架構 _ + ( ) y k + _ + + p ( ) d k 1 ˆp T u k( ) Adaptive law ( ) e k + _ ( ) Q z ˆ( 1) d k ˆ( )k 圖 3 適應性干擾觀測器架構圖
Single neuron based DOB _ + ( ) y k + _ + + p ( ) d k 1 ˆp T u k( )
圖 4 Single Neuron based DOB 架構圖
1
z
S ta te tr an sf o rm er 1 x 3 x 4 x 2 x ˆd
Single neuron based DOB
Learning rule
i
圖 5 Single Neuron based DOB 架構圖
圖 6 5.2 Tool 4 機台,Product A,Layer C,參數
模擬結果Cpk值
圖 7 圖 Tool 4 機台,Product A,Layer C,參數模
0 50 100 150 200 250 300 350 400 -0.07 -0.06 -0.05 -0.04 -0.03 ( μ m ) 0 50 100 150 200 250 300 350 400 -0.015 -0.01 -0.005 0 0.005 0.01 ( μ m ) 0 50 100 150 200 250 300 350 400 -2 -1.5 -1 -0.5 0 0.5 Run ( p p m ) A1 disturbance A2 disturbance X7 disturbance 圖 8 參數 A1,A2 和 X7 之干擾值
圖 9 Tool 5 機台,Product B,Layer C,參數模擬
結果Cpk值
圖 10 Tool 5 機台,Product B,Layer C,參數模擬
結果Cpm值 0 20 40 60 80 100 120 140 160 180 -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 Run A 5 d is tu rb a n c e ( μ ra d ) 圖 11 參數 A5 之干擾值 0 20 40 60 80 100 120 140 160 180 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 Run P ro c e s s o u tp u t y ( μ ra d ) A5 Adaptive DOB HIS 圖 12 參數 A5 干擾下,1st ADOB 與歷史資料輸 出比較 0 20 40 60 80 100 120 140 160 180 -2 -1 0 1 2 3 4 5 6 Run X 7 d is tu rb a n c e ( p p m ) 圖 13 參數 X7 之干擾值 0 20 40 60 80 100 120 140 160 180 -5 -4 -3 -2 -1 0 1 Run P ro c e s s o u tp u t y ( p p m ) X7 Adaptive DOB HIS 圖 14 參數 X7 干擾下,1st ADOB 與歷史資料輸 出比較