行政院國家科學委員會專題研究計畫 成果報告
順應性微致動器之設計與分析
計畫類別: 個別型計畫 計畫編號: NSC93-2212-E-151-007- 執行期間: 93 年 08 月 01 日至 94 年 07 月 31 日 執行單位: 國立高雄應用科技大學機械工程系 計畫主持人: 黃世疇 計畫參與人員: 藍志傑、李季旻 報告類型: 精簡報告 報告附件: 出席國際會議研究心得報告及發表論文 處理方式: 本計畫涉及專利或其他智慧財產權,1 年後可公開查詢中 華 民 國 94 年 9 月 20 日
行政院國家科學委員會專題研究計畫成果報告
順應性微致動器之設計與分析
計畫編號:NSC 93-2212-E-151-007 執行期限:93 年 8 月 1 日至 94 年 7 月 31 日 主持人:黃世疇 國立高雄應用科技大學 機械工程系 計畫參與人員:藍志傑、李季旻 國立高雄應用科技大學機械工程系 一、中文摘要 本計畫是使用拓樸最佳化之撓性機構 結合電熱式 V 型懸樑微致動器設計一種新 式微夾爪,此微夾爪與其它微夾爪相較, 具有驅動容易、適合於微製程、可依設計 目標得到最佳化機構之優點。所謂的撓性 機構是指利用結構本身的變形來產生一般 的機構運動,而不是利用一般機構中的轉 動接頭產生運動,所以撓性機構只是同一 平面的二維結構,此一優點符合微製程中 不易製作複雜結構的特性。此撓性機構的 設計是使用拓樸最佳化的理論得到,拓樸 最佳化是指在一個設計區域內所有可能之 拓樸形狀中,依照機構性能的需求定義, 在設計區域中找出符合設計定義的最佳拓 樸形狀,在拓樸最佳化過程中會使用到有 限元素分析作結構分析,而最佳化理論則 是用來定義問題並使用連續線性規劃法求 解問題。本計畫利用電熱式 V 型懸樑微致 動器結合拓樸最佳化撓性機構設計微夾 爪,並分析電熱式 V 型懸樑微致動器不同 參數下的性能與拓樸最佳化過程中各種參 數對拓樸結果之影響。 關鍵詞:微夾爪、電熱式 V 型懸樑微致動 器、拓樸最佳化、撓性機構 AbstractThis project describes the new way that using topology optimum compliant mechanism and V-shape electrothermal microactuator to design a microgripper. The advantages of present design are easily manufacturing and driving. This microgripper has more compact and optimum
structure than other microgripper. The compliant mechanism is a two-dimension structure, and it employs flexibility to generate movement without any hinge, therefore, it is suitable for Microelectromechanical Systems (MEMS) manufacture. The compliant mechanism is designed by topology optimization theory. The topology optimization means to define a design domain that has infinite possible shape. We can obtain the optimum shape according to the definition of requirements. In the topology optimization procedure the finite element method would be used to analyze the design domain structure and the optimization theory to solve the problem. This project combines with the topology optimum compliant mechanism and the electrothermal microactuator to design the microgripper and analyze the effects for result with different parameters in topology optimization.
Keywords: microgripper, V-shape electrothermal microactuator, topology optimization, compliant mechanism
二、緣由與目的 由於現今高科技的發展,對於產品性 能的提升、產品尺寸的縮小,已經成為必 然趨勢,加上半導體技術在二十世紀的發 展,一種微小尺寸、性能優異的產品隨之 而 生 , 稱 為 微 機 電 系 統(Micro Electro
Mechanical System, MEMS)。
微機電產品是一種可以將常尺寸下的 元件縮小整合成一個可能只有幾微米的晶 片。且由於尺寸的縮小,微機電產品可以
達到某些常尺寸產品無法達到的性能,例 如反應速度快、頻率高等特性。或許尺寸 的縮小可能也代表更高的生產成本,但微 機電產品卻是相反的,因為微機電產品是 以現存的半導體技術將產品批次生產,也 就是一個晶圓上可能有著數百、數千、甚 至數萬個產品,所以一個晶圓、一次製程 便可生產非常多的數量。由於數量的提 高,生產成本也相對的降低,所以對微機 電系統而言,這是非常有利的之處。 由於微小技術之發展,不論是在微產 品生產中之微加工、微組裝與定位等,或 者是醫療上微手術方面之需要,對於微小 物體的夾持與移動等方面的處理愈來愈重 要,所以微夾爪(Microgrippers)的設計與改 良具有相當大的發展空間。 首先在尺寸方面,若要將常尺寸中之 夾爪機構縮小至微尺寸,則一些轉動接頭 (Hinge)的製作將會變的非常困難,並不適 合以此種方法設計微夾爪。目前解決接頭 製程困難之方法,最主要是使用較小斷面 積之結構,利用材料的撓性(Flexibility)來 取代轉動接頭之功能,又稱為材料之順應 性(Compliance)。但此種直覺式的設計方法 對於機構設計上之考量較不周全,對於撓 性機構之外形與尺寸並無最佳化之設計。 另外,對於驅動源之設計方面,設計適合 的微致動器作為微夾爪之驅動源對於微夾 爪尺寸之縮小、性能與成本之改善將有相 當大之幫助。 三、結果與討論 3.1 定義設計區域 本計劃是利用拓樸最佳化的撓性機構 應用於微夾爪機構之設計,設計區域的意 思是定義一個區域形狀,在這個區域裡的 撓性機構外形暫時是未知的,必需經由拓 樸最佳化的過程找出在這區域中最適合的 撓性機構形狀。設計區域的定義包括區域 形狀與尺寸、使用材料、邊界條件、有限 元素分割的大小與輸入和輸出的數量、位 置、方向與大小、輸出部的彈簧係數,此 彈簧主要是用來決定指定輸出部結構的剛 性,其方向與指定欲輸出的方向相同。本 文對於微夾爪之設計區域定義如圖 1 所 示,材料是使用厚膜光阻SU-8 作為微夾爪 機構,SU-8 的彈性模數 E=4.4GPa、浦松比 ν=0.22。而其它詳細的定義列於表 1。 圖1 微夾爪之設計區域定義 表1 設計定義詳細資料 區域大小 夾爪大小 分割元素大小 800×800µm 100µm 20µm 輸出部彈簧係數 輸入力量 厚度 100N/m 6000µN 50µm 3.2 拓樸最佳化設計微夾爪撓性機構 本 計 劃 使 用 撓 性 機 構 (Compliant mechanism)來取代一般之機構,撓性機構 是利用材料本身的變形來取代一般機構中 之轉動接頭。而設計此微夾爪撓性機構的 方法為拓樸最佳化設計,此機構之驅動則 使用電熱式V 型懸樑微致動器。 撓性機構的拓樸最佳化設計在求解過 程中會用到結構分析與求解最佳化工具, 在結構分析方面是使用 ANSYS 有限元素 分析軟體、求解最佳化工具是使用數值軟 體MATLAB 中的最佳化工具箱。利用拓樸 最佳化撓性機構的方法設計微夾爪機構, 可得到表 1 設計定義下的結果,如圖 2 所 示,圖中元素網格顏色愈接近白色代表其 正常化密度ρ 愈接近 0,則此元素可以被去 除;元素網格顏色愈接近黑色代表其正常 化密度愈接近1,則此元素需被留下。流程 如圖3 所示。 在使用連續線性規劃法求解拓樸最佳 化過程中,設計變數起始值 ρi0為 0.3,大 約經過二十次的迭代後,目標函數將會達
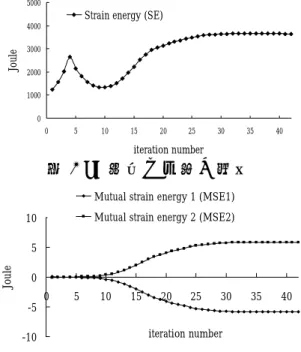
到收斂,如圖4,並得到圖 2 之拓樸最佳化 結果。另外 SE、MSE1與 MSE2在求解過 程中變化之趨勢如圖5、圖 6 所示,SE 最 後約收斂在3600 左右,代表此夾爪機構在 承受負載下之應變能為 3600µN‧µm;因 MSE1 與 MSE2 為夾爪之輸出位移,所以 其值相等但方向相反,約收斂在6µm 左右。 圖2 拓樸最佳化結果 圖 3 拓樸最佳化撓性機構設計流程圖 -200000 -100000 0 100000 200000 0 5 10 15 20 25 30 35 40 iteration number Jo ul e/ Jo u le
Objective function value
圖 4 目標函數收斂過程 0 1000 2000 3000 4000 5000 0 5 10 15 20 25 30 35 40 iteration number Jo ul e
Strain energy (SE)
圖5 SE 與迭代次數之關係 -10 -5 0 5 10 0 5 10 15 20 25 30 35 40 iteration number Joul e
Mutual strain energy 1 (MSE1) Mutual strain energy 2 (MSE2)
圖6 MSE1、MSE2 與迭代次數之關係 由本計劃對於在拓樸最佳化過程中有 許多設計參數,這些設計參數包括輸出位 置的彈簧常數與設計區域的材料厚度,在 此,將討論這些設計參數對於拓樸最佳化 結果的影響。 指定輸出位置上不同彈簧常數的拓樸 最佳化結果如圖 7 所示,不同彈簧常數對 於拓樸最佳化結果的影響如圖 8、圖 9 所 示 , 圖 8 中 可 發 現 愈 大 的 彈 簧 常 數 則 MSE1、MSE2 隨著變小,但彈簧常數的增 加量遠大於MSE 的減少,且因輸出部上的 抵抗力會等於輸出部彈簧常數乘上MSE, 所以在拓樸最佳化的過程中,輸出部的抵 抗力愈小,便使得微夾爪機構前端之爪子 部分材料分佈較小(較軟),換句話說,此彈 簧常數最主要的目的是為了決定在指定輸 出位置上的材料大小,也決定了此夾爪機 構之輸出力,所以夾爪之輸出力會隨的彈 簧常數的變大而增加。但我們發現,當彈 簧常數大於100N/m 後,夾爪之輸出力會維 持在600µN 左右,這是因為微夾爪之兩個 爪子部分的材料使用量已經達到上限,所 以再大的彈簧常數也不會改變夾爪之輸出 力。另外在此機搆的應變能方面與彈簧常 數的關係如圖 8 所示,愈大的彈簧常數會 使得機構的應變能增加,代表此機構的剛 性變差,這是因為隨著彈簧常數的增加, 夾爪的右半邊爪子部分提高了剛性,但卻 使得夾爪左半邊用來承受輸入力的部分剛
性變差。另外,關於夾爪輸出與彈簧常數 間的關係,由於此微夾爪之應變能會隨著 彈簧常數的變大而增加,代表此機構之剛 性變差,相對的撓度將會變大,所以夾爪 之輸出位移將會隨著彈簧常數的變大而增 加如圖 9 所示。所以在拓樸最佳化的過程 中,可以經由改變不同的彈簧常數的方 式,來得到不同輸出性能的微夾爪機構。 在相同的設計區域定義下,不同設計 區域厚度的拓樸最佳化結果如圖10 所示, 而厚度與SE、MSE 的關係如圖 11 所示, 隨著厚度的增加,SE 與 MSE 也隨著降 低。乃因厚度的增加,則此機構之剛性會 隨著提高(SE 變小),所以此夾爪之輸出位 移也會隨著厚度增加而減小,如圖 11 所 示。此外,因 MSE 隨著厚度的增加而變 小,所以在其它設計參數不變的條件下, 且彈簧常數固定,MSE 減小代表此夾爪機 構之前端爪子部分材料分佈較小(較軟),則 此夾爪機構之輸出力會隨著厚度的增加而 減少,如圖12 所示。 綜合以上所述,可以發現較大的彈簧 常數會使得經由拓樸最佳化設計的微夾爪 機構之輸出力與輸出位移增加,但會使得 此微夾爪機構之剛性減低。雖然增加彈簧 常數所設計出的微夾爪機構會使得輸出性 能提升,但是材料的破壞性質將是需要被 考慮的問題。另外在拓樸最佳化過程中, 對於設計區域的厚度也應該被考慮到,對 於厚度較大之設計區域雖然降低了夾爪機 構之輸出性能,但卻可以得到更多的剛性。 (a). K=100N/m (b). K=75 N/m (c). K=35 N/m (d). K=10 N/m 圖 7 不同彈簧常數之拓樸最佳化結果 0 200 400 600 0 50 100 150 200 250 spring constant k (N/m) SE × 0.1(Joule) MSE × 10(Joule) Output force (µN) 圖8 不同彈簧常數對拓樸最佳化結果的影 響 0 15 30 3500 4500 5500 6500 SE(Joule) (µ m ) Output displacement (µm) 圖9 應變能(SE)與夾爪尖端輸出位移之關 係 (a). t=12.5µm (b). t=50µm (c). t=100µm (d). t=150µm 圖10 不同設計區域厚度之拓樸最佳化結 果 0 10 20 30 0 50 100 150 200 Thickness (µm) SE × 0.01 (Joule) MSE (Joule) 圖11 不同設計區域厚度與 SE、MSE 的關 係
0 300 600 900 0 50 100 150 200 MSE (Joule) Displacement × 10 (µm) Output force (µN) 圖12 相互應變能(MSE)與輸出力、位移之 關係 3.3 微夾爪實作與量測 本文在微夾爪機構部分是使用 SU-8 厚膜光阻來作為結構材料,因為SU-8 有較 大的彈性變形區域,比起其它材料可以提 供較小的彈性模數來供撓性機構使用。而 微致動器因需要利用電流通過 V 型懸樑產 生熱膨脹變形,所以使用金屬材料鎳來作 為致動器結構。微夾爪撓性機構部分是直 接以SU-8 厚膜光阻微影得到,微致動器也 是使用 SU-8 厚膜光阻經曝光顯影得到光 刻模,利用電鑄技術將鎳沉積於光阻模 內,最後將微致動器電鑄結構釋放,可得 到此微致動器之結構。圖13 為拓樸最佳化 微夾爪撓性機構 SEM 圖片,圖 14 為微致 動器結構SEM 圖片。 圖13 K=200N/m 之拓樸最佳化微夾爪撓性 機構SEM 圖片 圖14 雙 V 型組合懸樑電熱式微致動器 SEM 圖片 在量測方面是量測微致動器尖端最高 溫度與致動位移量等,再以電熱式V 型懸 樑微致動器驅動微夾爪撓性機構,並量測 組合後的夾爪輸出位移等性能,組合後的 微夾爪SEM 圖如圖 15。 圖15 微夾爪 SEM 圖片 在微致動器的量測上,是將微致動器 在無輸出負載的狀態下施加電壓負載,量 測得到微致動器輸出位移與尖端最高溫度 等數值,而不同驅動電壓與微致動器尖端 輸出位移與最高溫度之關係,如圖 16、圖 17 所示。 將 微 致 動器與微夾爪撓性機構組合 後,量測得到微夾爪之輸出位移數值,不 同驅動電壓與微夾爪輸出位移關係,如圖 18 所示。 在量測的過程中,發現在微致動器的 最高溫度要比分析時的最高溫度高出許 多,而且電壓負載超過1.2V 後,溫度開始 劇烈的上升,在1.5V 後便因溫度過高使得 微致動器斷裂。會產生此種誤差的原因, 最主要是因微致動器在電鑄時難免會有雜 質的滲入,造成微致動器材料實際電阻值 與理論值的誤差,使得微致動器的電阻值 過高,產生的熱也愈多。所以本文之微致
動器在無輸出負載下,容許最高輸出位移 約為42µm,而微夾爪之最高輸出位移約為 43µm。 在微夾爪輸出位移的量測中發現,當 微致動器的溫度高於約120℃時,與光阻結 構接觸時會有軟化光阻的現象,所以在施 加1V 的電壓時,微致動器便有些微的軟化 光阻現象,並使得微致動器的尖端插入微 夾爪光阻結構中,造成量測的誤差。 0 5 10 15 20 25 30 35 40 45 50 0.4 0.6 0.8 1 Voltage (V) (µ m)
Microactuator output displacement (µm)
圖16 不同驅動電壓與微致動器尖端輸出 位移關係 0 25 50 75 100 125 150 0.4 0.6 0.8 1 Voltage (V) (℃ ) Temperature(℃) 圖17 不同驅動電壓與微致動器尖端最高 溫度關係 0 10 20 30 40 50 0.4 0.6 0.8 1 Voltage (V) (µ m)
Microgripper output displacement (µm)
圖18 不同驅動電壓與微夾爪輸出位移關 係 四、計畫成果自評 本計劃利用拓樸最佳化的方法設計微夾 爪之撓性機構,並以電熱式V 型懸樑微致 動器作為驅動源,在實作上主要是使用 SU-8 厚膜光阻技術與微電鑄技術來製作微 夾爪撓性機構與微致動器。並利用有限元 法ANSYS 分析軟體,分析本計劃利用拓樸 最佳化得到的撓性夾爪的可行性。並完成 微夾爪的組裝和測試。在輸入電壓1V 時, 位移量為43µm,達到微夾爪設計目標。 五、成果發表
Shyh-Chour Huang, Chien-Ching
Chiu,”Design of Microgripper with Topology Optimal Compliant Mechanism”, ASME, International Mechanical Engineering Congress & Exposition, Anaheim, Nov.13-19, 2004. (NSC 92-2212-E-151-002)
六、參考文獻
[1]. P. B. Chu and K. S. J. Pister, “Analysis of Closed-loop control of Parallel-Plate Electrostatic microgripper”, Proceedings of the IEEE International Conference on Robotics and Automation, Vol. 1, 8-13 May 1994, pp.820-825
[2]. N. Mita, H. Kawara, H. Toshiyoshi, M. Ataka and H. Fujita, “An electrostatic 2-dimensional micro-gripper for nano structure”, Solid-State Sensors, Actuators and Microsystems, 12th Innational Conference on, Vol. 1, 2003, pp.272 – 275
[3]. W. Nogimori, K. Irisa, M. Ando and Y. Naruse, “A Laser-Powered Microgripper”, Micro Electro Mechanical Systems MEMS '97 IEEE Proceedings, Tenth Annual International Workshop on , 26-30 Jan. 1997, pp.267-271
[4]. M. Kohl, B. Krevet and E. Just, “SMA microgripper system”, Sensors and Actuators, A 97-98, 2002, pp.646-652
[5]. B. Sebastian, S. Volker and B. Stephanus, “Novel micro-pneumatic actuator
for MEMS”, Sensors and Actuators, A 97-98, 2002, pp.638-645
[6]. Yong-Mo Moon, Brian Patrick Trease, Sridhar Kota, “Design of Large-Displacement complinat joints”,
Proceedings of DETC’02, MECH 27th
Biennial Mechanisms and Tobotics Conference, Sep 29- Oct 2, 2002, Montreal, Canada
[7]. Larry L. Howell, “Compliant
Mechanism”, Hardcover, USA, 2000, pp308-329
[8]. A. Saxena and G. K. Ananthasuresh, “On an optimal property of compliant topologies”, Struct Multidisc Opim. 19, 2000, pp.36-49
[9]. Jasbir S,Arora, “Introduction to
Optimum Design”, McGraw-Hill Series in Mechanical Engineering, USA, 1989