Volume 23, No.4, 2018, pp. 257-271 DOI:10.6574/JPRS.201812_23(4).0003
1國立臺灣師範大學地理學系 碩士生 收到日期:民國 106 年 09 月 18 日
2國立臺灣師範大學地理學系 副教授 修改日期:民國 107 年 02 月 12 日
3國立臺灣師範大學地理學系 碩士 接受日期:民國 107 年 11 月 20 日
*通訊作者, 電話: 02-77341683, E-mail: [email protected]
手持式三維掃描儀於坑道測量之可行性分析
洪翎嘉
1王聖鐸
2*黃傳楷
3摘要
過去受限於技術與設備,只能將三維空間資訊投影在二維地圖上展現;近年來拜電腦軟硬體突飛猛 進之賜,三維空間資訊的展現已經可以用虛擬實境(Virtual Reality, VR)甚至擴增實境(Augmented Reality, AR)的方式展現,不僅更直覺,也更詳實而精確。坑道測量受限於封閉環境,過去僅以平板儀或經緯儀測 繪平面圖表示。以近景攝影測量測繪坑道三維模型,必須大量佈標、廣設控制點及光源,需大量人力且花 費時間。地面光達(Light Detection and Ranging, LiDAR)搭配相機攝像,可以快速獲取坑道三維點雲(Point Cloud),是最適合坑道三維測量的選項。但地面光達所費不貲,且彎彎曲曲的坑道必須分別設站掃描,再 將各場景連接起來,需要高階的電腦及專業的人力才能處理。近來有廠商推出手持式三維掃描儀,採用結 構光(Structured Light)原理,可快速擷取近距離(約 4 m 內)三維點雲,理應相當適用於坑道三維測量。因 此本研究採用 DotProduct 公司出品的 DPI-8 手持掃描儀作為實驗組,並以 FARO 公司出品的 Focus3D 地 面光達作為對照組,於花蓮七星潭四八高地下方坑道進行測量。將兩者所得的三維點雲,透過開源軟體 Recap360 以及 CloudCompare 進行三維資料的比較,了解手持掃描儀於狹小且缺乏光源的坑道中進行測 量工作的可行性。
關鍵詞:手持式三維掃描儀、地面光達、坑道測量
1. 前言
2005 年 Google Earth 推出後,使一般大眾對 於三維數位城市更加了解(蔡富安、陳良健,2010),
空間資訊也漸漸從平面延伸至立體,立體不僅相對 於平面的呈現方式較貼近現實生活中的實際狀況,
且立體的展示較為直觀,也易於大眾觀看,如:下 水道管線圖的建立;更能將立體模型用於必要的模 擬分析,如:大樓火災逃生模擬等。三維模型的建 立取決於三維資料的獲取,然而光達是擷取現實中 三維資料的儀器之一,近年也廣泛應用於各領域,
如:古蹟建物數位典藏(Allen et al., 2003)、橋梁監 測等,但光達具有攜帶便利性較低、價格昂貴、點 雲資料龐大、一般電腦較不易處理等問題,一直使 光達無法普及。因此近來有廠商以結構光原理開發
出手持式三維掃描儀,如:美國 DotProduct 公司所 生產的 DPI-8,相較於光達而言,機器較輕便且點 雲資料小較容易處理。本研究以地面光達和手持式 三維掃描儀進行坑道掃描,試圖了解手持式三維掃 描儀於燈光昏暗及空間狹小的坑道中進行測量之 可行性。
2. 坑道測量
坑道異於平面道路,無法透過衛星影像明顯的 辨識坑道的位置以及坑道內的路徑變化,因此要透 過衛星影像直接在地圖上繪製有其困難性。一般大 眾常使用的網際網路地圖也幾乎沒有標示完整的 坑道路徑,地圖上坑道的所屬位置經常是一個點圖 徵來代表該坑道。而若要將坑道的路徑完整繪製於 地圖上,需進行坑道測量,但坑道測量也異於一般
道路外業測量,坑道內無法藉由全球導航衛星系統 (Global Navigation Satellite System, GNSS)得知絕對 坐標,故獲取坑道內坐標的方式,僅有利用坑道外 的已知坐標引測進入坑道內,再進行特定點坐標值 之計算,但坐標之準確度(Accuracy)則會受到測點 數量的多寡而影響,準確度也會隨著誤差傳播而降 低,再加上坑道內部狹小彎曲以致於各站之間無法 通視,也無法進行多餘觀測。除了坐標準確度外,
在坑道內進行測量時,僅能依靠人為架設光源以利 坑道作業的進行,此時更加造成測量工作之不易。
若採用三維掃描儀進行坑道外業測量,可以不受限 於光線的問題,三維掃描儀也可透過架站的數量解 決坑道狹小彎曲,以及點雲與點雲之間可能不易銜 接等問題,三維掃描儀也可快速獲取掃描區域的三 維資料,比起一般的平面測量,可獲得較符合真實 現況且完整的資料。目前在坑道測量中,光達扮演 坑道安全性監測的角色,測量坑道結構的變形程度 (陳國永,2004),光達的使用可使坑道變形監測更 加的具有效率且精準(Han et al., 2013a、Han et al., 2013b)。
3. 三維掃描儀
本研究所採用的三維掃描儀分別為雷射掃描 以及影像式紅外線感測兩者不同感測器。雷射掃描 是主動式光源,有利於光線不足的場所進行掃描,
掃描所得的結果會依據掃描前所設定的參數,以等 距離間隔的方式排列,在險峻的環境中,三維雷射 掃描儀只需要一個立基點,即可快速地達到工程測 量所需之精度,相對於傳統的測量工具而論,不僅 快速又安全(曾義星、史天元,2003)。影像式紅外 線感測,透過相機偵測影像,感測器是採用紅外線 進行周遭物體的感測,此次實驗採取以雷射光為感 測器的 FARO Focus3D 地面光達以及影像式紅外 線感測的 DPI-8 手持式三維掃描儀。
3.1 FARO Laser Scanner Focus3D 地面光達
FARO Laser Scanner Focus3D 地面光達利用 紅外線雷射光發射至物體,再經由物體反射光回接
收器,計算時間差來進行三維點位的獲取(圖 1)。
根據 FARO 公司所提供的資訊,其掃描範圍為 0.6 m 到 153.49 m,掃描的誤差在反射率 10%至 90%
條件下,10 m 到 25 m 時誤差為 ±2 mm,內建相 機為 7000 萬畫素且利用自動亮度調整的方式,電 池續航力約五個小時,可更換電池,儀器總重量為 4.5 kg。在執行光達掃描時,因其視野角度水平為 360 度,垂直為 305 度,所以儀器下方有 55 度的 範圍是無法獲取任何點雲資料。地面光達的掃描成 果檔案較大,不同參數的掃描,有大略不同的大小,
操作光達時,切記周遭人員眼睛勿直視光達之雷射 光,因光達被設為 Class3R 等級的儀器,若眼睛直 視雷射光可能導致眼睛受傷,故在光達的操作手冊 規 範 中 有 規 定 不 同 參 數 的 危 險 距 離 (Nominal Ocular Hazard Distance, NOHD)(FARO, 2011)。光達 可使用範圍廣,於室內外都可以進行掃描,但於室 外使用時,可能因霧、雨、動物等外在因素,會導 致該次掃描之結果有較多雜點,在內業處理時,就 需處理點雲雜訊之部分。進行內頁處理時,FARO 所自行配合的軟體「Scene」可以做為內業使用,包 括場景的銜接以及三維絕對坐標的布置等都可於 其軟體進行處理。
圖 1 光達原理圖(FARO, 2011)
地面光達在執行掃描前,須設定參數,其有四 種基本的模式可以挑選,分別為室外 20 m 以外及 以內,室內 10 m 以外及以內,在不同的場域則挑 選合適之參數(圖 2),參數會影響掃描後點雲結果 之精密度,而隨著參數設定的不同所需的時間也會 有所差異。除了光達參數的設定之外,共軛球 (Reference Sphere) 或 是 棋 盤 標 (Checkerboard
target)(圖 3)的布置也是極其重要的環節,六顆共 軛球需有高低差且不能佈置於同一象限,若共軛球 數目不足,可以增貼棋盤標輔助,以利後續各場景 銜接使用。
目前已有眾多文獻針對 FARO Focus 3D 進行 研究,如幾何校正(García-San-Miguel and Lerma, 2013),也有多篇研究採用 FARO Focus 3D 掃描之 成果作為參考值,再與其他三維掃描成果進行比較 (Thoeni et al., 2014、Thomson et al., 2013),本研究 後續會採用 Focus 3D 所掃描成果作為實驗之參考 值。
圖 2 光達參數挑選圖(FARO, 2011)
圖 3 共軛球以及棋盤標
3.2 DPI-8 手持式三維掃描儀
DPI-8( 圖 4) 手持 式三 維 掃描 儀是 採 用安 卓 (Android)系統的平板並加裝紅外線感測之儀器,採 用結構光光斑圖形(speckle pattern)的原理(Kersten et al., 2016),搭配平板內已安裝的應用程式—Phi- 3D 進行實體空間的三維資料獲取。根據 DotProduct 公司所提供之資訊,掃描範圍為 0.6 m 至 4 m,點 密度則在 1 m 的距離可小於 1.7mm。掃描準確度 會受到當下的氣溫、掃描距離、掃描角度、環境亮 度、物體反射率……等所影響(Ahern and Spring, 2015),掃描範圍小於 1 m,準確度可達 99.8%。水 平視野角度(Horizontal FOV) 為 57.5 度,含有 16GB 的儲存空間,最多可容納 5000 次的掃描檔 案,DotProduct 公司也建議使用者每個掃描檔的大 小盡量維持在 20MB 左右。掃描後可利用 USB 或 是 Wifi 進行檔案的存取,DP 格式檔可於 ReCap™、
CloudCompare™等軟體進行後續內業操作,除了 DP 之檔案類型外,仍有 PTS、PTX、PLY、PTG、
E57 等格式可選擇匯出(DotProduct, 2017b)。
圖 4 DPI-8 手持式三維掃描儀
掃描前須先預想掃描路徑,選擇一條適合的路 徑,起始點選擇固定不動、有高辨識度且有明顯具 有三個維度的特徵物為佳,例如:牆角、桌子或樓 梯等。若該次掃描路徑沒有明顯的特徵物,則會建 議掃描前先於掃描路徑上布置數個由 DotProduct 公司所提供的四月標(April Tags)(圖 5)以便於各掃 描檔之間的銜接或是單次閉合掃描起訖之使用,大 約有 99 張圖案皆不相同的四月標,故在執行掃描
時,不會有因四月標重複而導致掃描檔銜接錯誤之 問題,但放標時須將四月標置於掃描期間不會移動 且表面平坦的物體上,以利掃描後之正確性較高。
除了布置四月標之外,若要於掃描檔設置絕對坐標,
需在掃描前布置棋盤標,掃描結束後,即可於手持 式三維掃描儀上直接輸入棋盤標之三維坐標。
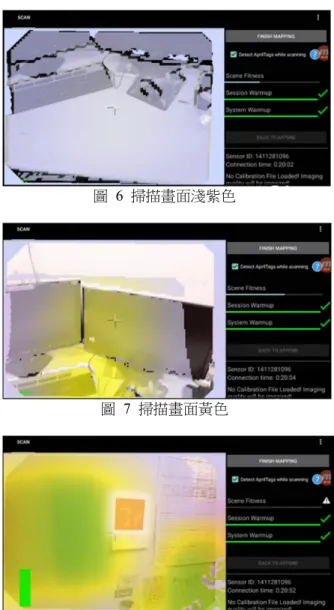
開機進行掃描前需暖機 15 分鐘,暖機過後即 可立即進行掃描,進行掃描時,平板上的畫面會隨 著得到的點雲資料的多寡呈現不同的顏色,如圖 6,
此畫面有部分為淺紫色,淺紫色部分代表無任何點 雲資料,此時有可能因掃描者離掃描物體過遠或過 近,掃描者可緩慢前進或退後再進行掃描解決此狀 況。畫面也可能如圖 7,此畫面為黃色,代表點雲 資料仍有不足之處,掃描者應稍作等待,使手持式 三維掃描儀可以感測更多的點,等待點雲資料較為 足夠後,再進行移動,但不同的掃描主題,有不同 的精度需求,掃描者可視當下情況而決定每個範圍 需掃描之時間。最後此畫面為綠色,如圖 8,代表 點雲資料已足夠,可以移動下一區域再進行掃描。
掃描的過程中,建議先讓畫面覆蓋大部分欲掃描之 範圍,再慢慢地靠近,仔細地進行細部掃描,此掃 描方式可避免掃描儀移動時,因掃描者移動過快或 是掃描區域景色過於單一且特徵物缺乏,例如:一 大面的白色牆壁,而導致出現警告失去路徑(圖 9) 之畫面,或者可以擺放特徵物或是貼一個四月標以 利辨識,增加掃描的成功率。大範圍之掃描須分段 進行,因 DPI-8 僅有 2G 記憶體(RAM)(圖 10),故 進行閉合掃描時,需要注意剩餘之記憶體是否足夠 可以執行閉合掃描。分段掃描時,一段掃描結束後,
再進行下一段掃描前,手持式三維掃描儀可以選擇 上一段之特徵場景或是四月標為下一段掃描之起 始點(圖 11),當掃描結束時,內部軟體會自動進行 銜接,掃描結束可以設定三維坐標系(圖 12),並可 以輸入三維坐標。
手持式三維掃描儀除記憶體可能不足之限制 外,其無法於室外有強光的狀態下進行掃描,也不 適合在透明與半透明的物體上進行掃描,掃描時僅 靠平板提供感測器電力,導致整體可執行掃描時間 僅只有兩個小時,亦無法使用外接式行動電源,但
益處為輕便攜帶,易於行動,可以掃描任何想掃描 的區域,也可直接在儀器上執行各段掃描檔銜接以 及建立三維絕對坐標系,不僅節省處理點雲內業時 間,若對於掃描檔之銜接若有問題,可以立即再進 行一次掃描,節省內外業需往返之時間。
圖 5 April tags(DotProduct, 2017a)
圖 6 掃描畫面淺紫色
圖 7 掃描畫面黃色
圖 8 掃描畫面綠色
圖 9 失去路徑之警示
圖 10 掃描時記憶體使用狀況
圖 11 場景銜接—特徵場景選擇之畫面
圖 12 設定三維坐標系
4. 實際案例
4.1 實驗區
本次研究透過實驗的方式,利用不同的儀器於 同一個場域進行三維掃描,選定花蓮七星潭社區的 軍事坑道—四八高地戰備坑道為本次實驗的場域,
該坑道經國防部同意以不影響戰備任務為原則,進 行有限度地開放地方政府做為觀光使用,近年皆由 七星潭社區發展協會積極的規劃(花蓮縣新城鄉七 星潭社區發展協會,2015),不過四八高地戰備坑道 目前仍尚未對外開放,社區發展協會努力將軍事坑 道進行活化,也希望作文史保存,故本次實驗則有 良好的場域,可進行實驗。從七星潭社區喻為「出 賣日出」之處的木棧道為起始點,緊接著進入砲陣 地,一直至四八高地戰備坑道中的東 13 入口處(圖 13)為此次的實驗範圍,該坑道寬度最小僅約 90 cm,
坑道不僅狹小,再加上燈源部分較不充足,更加劇 此次測量的困難度。
圖 13 實驗場域(截取自 OpenStreetMap)
4.2 施測流程
DPI-8 手持式三維掃描儀因無法於強光的室外 進行掃描,因此從內部的砲陣地開始進行掃描。掃 描前,因坑道內部場景較單一,為了避免掃描時會 不斷遇到失去路徑之狀況,故需先將四月標貼於坑 道中,以利掃描時容易辨識,除了四月標之外,也 需黏貼棋盤標,以利後續設定絕對坐標使用,但因 坑道較昏暗,為了避免掃描時較難辨識,此次掃描 有配置人員進行燈照的工作。每一次掃描的範圍依 據當下記憶體的狀況而定,所以事前無法準確預估 架站的數量,再進行下一次掃描時,利用場景銜接
的功能直接點選明顯的特徵物後,再進行下一次的 掃描,讓各掃描檔之間可直接進行場景銜接。
將各掃描檔銜接完成後,即可設置絕對坐標,
本次皆採用各掃描儀公司所提供之軟體進行絕對 坐標之設置,但 DotProduct 的「Phi-3D」軟體中設 置絕對坐標時,僅能輸入一點坐標,在軟體中輸入 原先於場景中所設置棋盤標的三維坐標後,掃描的 場景會從圖 14 (b),轉變成片狀如圖 14 (a)所示,
圖 15 為從砲陣地內部,輸入絕對坐標後,也成為 片狀,不再為原本的樣貌,這因素可能與其軟體一 個坑道掃描檔僅能輸入一點三維坐標有關,因一個 三維坐標無法進行平差計算,軟體可能直接利用該 點三維坐標進行其他點雲之坐標計算,才會導致計 算完之掃描檔呈現片狀。
Focus3D 地面光達從出賣日出的木棧道開始 進行掃描,將本次實驗場域分成八站進行掃描,
室外木棧道 1 站、砲陣地 2 站,坑道範圍以轉彎 處作為劃分共分為 5 站,架站時還需顧及站與站 之間需要有重疊區,故須確保下一站可以看到前
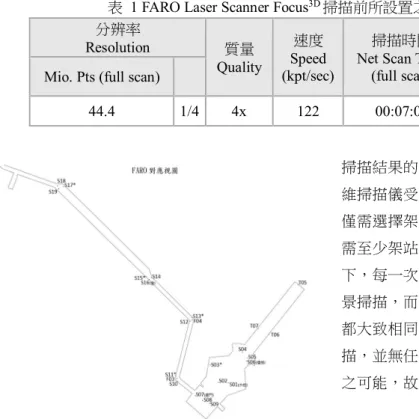
一站所設置的共軛球且不能被任何物體遮蔽,以 利後續掃描檔銜接。光達掃描前,將儀器的掃描 參數設定為分辨率為 1/4,質量為 4X,每次掃描 大約需七分鐘(表 1)。移站進行掃描前,需先布 置共軛球,共軛球將是內業作業銜接各站點雲資 料的依據,且為給定坐標的特徵物,圖 16 為此 次實驗設置的所有共軛球之點位,也是本研究之 實驗範圍。
掃描結束後,利用各儀器所提供的內業軟體 進行操作,銜接各掃描檔,並且設置絕對坐標。
將各自掃描檔處理結束後,地面光達以及手持式 三 維 掃 描 儀 之 掃 描 檔 都 先 匯 入 免 付 費 軟 體 CloudCompare,以地面光達所掃描之點雲資料作 為參考值,將手持式三維掃描儀之點雲資料與之 進行比較,比較不同掃描儀器掃描結果之點雲差 異,最後再利用一樣為免付費軟體的 Autodesk Recap360 內進行展示,並量測數個特徵物之長度,
進行準確度比較。
(a) 已設置絕對坐標 (b) 未設置絕對坐標 圖 14 DPI-8 手持式三維掃描儀設置絕對坐標(側面)
(a) 已設置絕對坐標 (b) 未設置絕對坐標 圖 15 DPI-8 手持式三維掃描儀設置絕對坐標(內部)
表 1 FARO Laser Scanner Focus3D掃描前所設置之參數(FARO, 2011) 分辨率
Resolution 質量 Quality
速度 Speed (kpt/sec)
掃描時間 Net Scan Time
(full scan)
pt/360°
危險距離 NOHD [m]
Mio. Pts (full scan) 軸向
axial 逕向 radial 44.4 1/4 4x 122 00:07:09 10,240 10.61 3.24
圖 16 實驗範圍以及地面光達共軛球點位示意圖
5. 實驗成果分析
5.1 點雲結果
手持式三維掃描儀與地面光達的點雲各自透 過軟體銜接每一站的掃描檔,圖 17 和圖 18 分別 為銜接完成之坑道圖,採用每一個坑道片段掃描 檔案呈現不同顏色之對應視圖,從兩張對應視圖 中,可以清楚發現手持式三維掃描儀以及地面光 達使用者須採行的掃描行為有所差異。手持式三 維掃描儀會依照現地的狀況不同,而掃描的路徑、
範圍以及檔案大小則不同,有時可能因記憶體不 足之因素或特徵物缺乏等,在一段坑道中只能先 掃描坑道的一部分,例如:圖 17 中 Scan_3 至 Scan_6 掃描檔看似為同一區域,但每一個掃描檔 之掃描重點略有所差異,三個掃描檔才順利建構 出一個完整的坑道入口以及坑道第一個轉彎處,
但會需要掃描三次,乃因該區域相較於砲陣地較 於昏暗且特徵物嚴重缺乏,一直產生失去路經需 重新掃描之情況,除掃描環境因素外,儀器使用 者對於手持式三維掃描儀使用的熟悉度也會影響
掃描結果的成敗。同一個坑道掃描相較手持式三 維掃描儀受限於掃描環境的不確定性,地面光達 僅需選擇架站位置,依據坑道每一次的轉折,則 需至少架站乙次,在未調整掃描角度範圍之情況 下,每一次進行掃描皆為以儀器為中心,進行環 景掃描,而同一個參數設定每次掃描檔案之大小 都大致相同,在掃描過程中只需等待儀器完成掃 描,並無任何如同手持式三維掃描儀會失去路徑 之可能,故在缺乏光源掃描環境相對單一筆直的
圖 17 DPI-8 手持式三維掃描儀各掃描檔對應視圖
圖 18 FARO Focus3D 地面光達各掃描檔對應視圖
坑道內,地面光達所需的外業時間比手持式三維 掃描儀少,但若坑道彎曲情況較多,則地面光達 會因每次轉折處需架站掃描,而花費較多的時間。
銜接完成的掃描檔案,本研究利用 Recap360 進行特徵物的擷取,再將擷取後的掃描檔匯入 CloudCompare 進行點雲的比較。特徵物擷取會分 為兩部分,其一是小範圍的坑道入口鐵門(圖 19),
其二是大範圍的坑道砲陣地(圖 22),試圖釐清不 同範圍下,各範圍的精度。地面光達在進行掃描 時,因離鐵門的距離較遠且鐵門的連接處前方可 能有遮蔽物,故造成鐵門的點雲有部分缺失,點 雲數量也低於手持式三維掃描儀,兩者數量相差 快至一倍。在軟體中以地面光達的點雲為比較的 參考依據,將手持式三維掃描儀的每一個點與地 面光達的點雲進行距離的比較,計算各點與相對 應參考點的距離,圖 20 為比較結果的示意圖,
除了鐵門的連接處外,其餘鐵門的主體與地面光 達所測得的點雲並無差異太大,手持式三維掃描 儀有 80%的點與地面光達相差之距離小於 3 cm,
從表 2 點雲比較的統計值中,兩者最大的錯誤率 約為 0.8%。
表 2 鐵門點雲比較統計值 手持式三 維掃描儀 (Compared)
地面光達 (Reference) 點雲數量 157689 89234 最 小 殘 差 距 離
(Min dist.) 0 m 最 大 殘 差 距 離
(Max dist.) 0.202 m 平 均 殘 差 距 離
(Avg dist.) 0.020 m 標準偏差
(Sigma) 0.033 最大錯誤
(Max error) 0.008
(a)手持式三維掃描儀 (b)地面光達 圖 19 坑道入口之鐵門點雲
圖 20 鐵門點雲比較示意圖
圖 21 鐵門點雲殘差直方圖
第二部分為大範圍的坑道砲陣地,砲陣地是 邊長以及高度皆約為 4 m 的六角形,手持式三維 掃描儀掃描範圍的極限為 4 m,再加上砲陣地為半 室外空間,當天測量時間約接近中午,陽光強烈 照射砲陣地導致掃描檔有一部分是沒有點雲的情
況。兩者掃描檔大致擷取大致相同的範圍進行比 較,以地面光達之點雲為比較的參考依據,圖 23 為手持式三維掃描儀之點雲與地面光達比較後之 結果,圖中右上角為點雲之間差異較大之處,乃 因於該處地面光達因架站問題,該處被牆角遮蔽,
點雲較為稀疏甚至缺乏,故兩者比較之差異甚大。
從圖 24 的殘差直方圖中,手持式三維掃描儀約有 90%的點與地面光達的點距離小於 30 cm,則表 3 的統計值中,最大殘差距離為 1.9 m,平均殘差約 為 6.9 cm,範圍越大可能造成的誤差就越大。
(a) 手持式三維掃描儀 (b)地面光達 圖 22 砲陣地點雲示意圖
圖 23 砲陣地點雲比較差異俯視圖
圖 24 砲陣地點雲殘差直方圖
表 3 砲陣地點雲殘差統計值
上述兩者比較點雲的方式皆以手持式三維掃 描儀之點雲為基準,在對照地面光達資料為參考 值,圖 25 則以手持式三維掃描儀為參考值,從 圖中即可立即看出在砲陣地中,手持式三維掃描 儀與地面光達點雲分布之差異,手持式三維掃描 儀在砲陣地屋頂的部分幾乎沒有足夠的點雲資料,
故該處的差值可將近 2 m 的差異。
圖 25 DPI-8 手持式三維掃描儀與 Focus 3D 地面 光達之差異示意圖
5.2 掃描細部差異比較
三維掃描儀兩者因掃描的方式不同,而導致 點雲的分布樣態略有不同。手持式三維掃描儀進 行掃描時,較無掃描死角,掃描的點雲範圍取決 於使用者掃描之路徑,反之地面光達進行掃描時,
則無法針對單一需細部掃描之處,只能再多架設 一站,補足使用者欲細部掃描之區域;如:進坑
手持式三維 掃描儀 (Compared)
地面光達 (Reference) 點雲數量 14157502 20883029 最 小 殘 差 距 離
(Min dist.) 0 m 最 大 殘 差 距 離
(Max dist.) 1.925 m 平 均 殘 差 距 離
(Avg dist.) 0.069 m 標準偏差(Sigma) 0.227 最 大 錯 誤 (Max
error) 0.054
道前的牆壁,圖 26 (a)為手持式三維掃描儀掃描 結果,圖 26 (b)為地面光達掃描結果,因地面光 達架站之處,圖中紅框處為光達掃描之死角,點 雲資料也較少,但手持式三維掃描儀則能進行較 細部的掃描。圖 27 為坑道內文字,手持式三維 掃描儀在進行掃描時,因掃描者欲使文字清楚地 並完整的保留,故利用燈具進行照射並仔細的進 行細部掃描,也讓該處的點雲資料相對於其他區 域呈現較密集之樣貌,如圖 27 (a)。地面光達在進 行掃描時,並無法在掃描過程中針對單一區域變 更點雲密度,且當時為了維持坑道之一致性,並 無對該段文字進行燈光照射,所以文字的部分並 不明顯。此外,手持式三維掃描儀無法於強光下 進行掃描,圖 28 為坑道入口處照明燈兩者掃描之 結果,圖 29 為測量當天所拍攝的照片,測量時該 盞照明燈有開啟,地面光達的點雲檔仍完整呈現 照明燈的樣貌,但手持式三維掃描儀則無法掃描,
故該處幾乎沒有點雲產生。
(a)手持式三維掃描儀 (b)地面光達 圖 26 掃描檔局部比較
(a)手持式三維掃描儀 (b)地面光達 圖 27 重點掃描
(a)手持式三維掃描儀 (b)地面光達 圖 28 掃描檔局部比較—照明燈圖
圖 29 現地照片
5.3 量測精度分析
光達之掃描精度目前可達厘米等級,為了試 圖了解手持式三維掃描儀實際的精度為何,本次 實驗將手持式三維掃描儀以及地面光達的掃描檔 案分別匯入 Autodesk Recap360 進行特徵物的長度 量測。表 4 為本研究以砲陣地為範圍,量測七個 明顯的特徵地物示意圖,從最小特徵物 A4 紙之紙 張寬度、門、樓梯,最大特徵物為六邊形的砲陣 地其中一個邊的牆面,進行量測比較之結果。量 測結果會受到三維掃描儀本身之掃描精密度外,
亦然包含直接利用點雲資料進行量測的人為點選 誤差,故為了降低人為點選所造成的誤差,每個 量測的目標物皆會進行 5 次量測並取平均值,平 均值為實驗的量測結果。
表 4 手持式三維掃描儀及地面光達長度量測比較表
說明 手持式三維掃描儀 地面光達
1 A4 紙寬度
2 四月標長度
3 坑道入口鐵門寬度
4 坑道入口處牆壁寬度
5 坑道入口寬度
6 砲陣地鐵樓梯寬度
7 砲陣地一邊牆面
表 5 各量測結果比較表(單位:m)
表 5 為 7 項特徵地物量測 5 次的平均結果,
再將手持式三維掃描儀與地面光達進行差值比較,
利用地面光達所得之量測結果視為真值,手持式 三維掃描儀以及地面光達兩者所量測結果之差值 皆於兩公分以內。精度為差值之絕對值與地面光 達之比值,7 項特徵地物量測精度平均可達 1.11%,
亦為量測 100 cm 會有約 1 cm 之誤差,因掃描結 果隱含人為點選誤差,故每次點選所量測之結果 不盡相同,雖採用多次量測欲降低人為誤差,但 量測範圍越小,則人為點選誤差影響程度越大。
手持掃描儀以及地面光達皆是獲取三維資料 的儀器,但兩者因儀器的操作方式不同,而造成 掃描的點雲結果略有不同,手持式掃描儀為手持 掃描,具有重量輕盈、可單手掃描……等優勢,
掃描時可無死角的掃描任何一個場域,不會如同 地面光達有因遮蔽而無法獲取遮蔽物後方點雲的 問題。手持掃描使用者可依據自己所需之區域,
而加強掃描,但地面光達無法,地面光達每一個 掃描檔所有的點雲是呈現均勻分布,但也因為兩 者感測三維資料的方式不同,故可掃描的範圍則 有所差異,手持式三維掃描儀無法進行長距離的 掃瞄,所以相較於此,手持式三維掃描儀適合小 範圍空間的掃描。除了掃描範圍有所差異外,相 對於地面光達,手持式三維掃描儀較容易受限於 環境因素,而導致無法獲取點雲的可能性較高,
例如:無燈光、強光、氣溫過於嚴峻、環境單一 缺乏特徵物……等皆可能導致無法獲取三維資料 的。手持掃描儀所產製的點雲資料,進行量測長
度的結果與地面光達之誤差小於 2.5%,但軟體上 進行點選量測,隱含著人為點選可能造成的誤差。
6. 結論與建議
手持式三維掃描儀相對於地面光達而言,不 僅手持輕便且內業處理快速,其應用彈性也較高,
可依照使用者的需求,移動至任何一個角落,或 決定當下的點雲數量獲取的多寡,但其仍受限於 環境以及使用者操作的技術性影響。如本研究於 昏暗的坑道中進行掃描,手持掃描儀掃描期間需 要外加燈光的輔助,在強光的室外或是燈光不足 的場域皆無法進行掃描。且手持掃描儀受限於結 構光原理及儀器功率大小,僅適合掃描近距離、
小範圍的場域,無法進行長距離的掃描,以至於 分站次數繁多;但地面光達可於參數進行調整後,
進行大範圍室內或室外掃描。於本實驗中,兩者 在長度量測的差異約為 1.1%,使用者可依照該次 進行三維掃描的使用目的,考慮容許誤差,再選 用適合的三維掃描儀。例如進行橋梁監測的工程 測量,仍應選擇誤差為 mm 等級且可固定架站進 行掃描的光達較適合;若為了文資數位典藏,或 建置提供民眾觀看的三維模型,手持式三維掃描 儀應已足可達成目的。亦或兩種三維掃描儀應相 輔相成,視目的以及掃描區域而選擇不同的儀器,
例如利用地面光達先進行大範圍的掃描,細部範 圍區域則用手持式三維掃描儀進行重點式的細部 掃描。手持式三維掃描儀掃描的檔案較小,因此 內業的處理時間也快,且掃描結束的當下,即可
說明 手持式三維掃描儀 地面光達 差值 精度
1 A4 紙寬度 0.206 0.211 -0.005 2.4%
2 四月標寬度 0.160 0.163 -0.003 1.8%
3 坑道鐵門寬 0.937 0.932 0.005 0.5%
4 坑道入口處牆壁寬度 0.567 0.568 -0.001 0.2%
5 坑道入口寬度 0.903 0.911 -0.008 0.9%
6 樓梯寬度 0.896 0.911 -0.015 1.6%
7 砲陣地牆壁寬度 4.894 4.876 0.018 0.4%
透過平板電腦觀看掃描結果,並判斷是否能與上 一個掃描順利銜接,可大幅節省節省內業處理點 雲資料的工作,以及降低掃描失敗須回到外業現 場重測之機率。
本研究採用開源軟體進行坑道測量的可行性 分析比較,但目前的開源軟體並未提供三維點雲 幾何對位的平差計算功能,而 DotProduct 公司所 提供之軟體又僅能輸入一個控制點的坐標,導致 掃描的點雲輸入坐標後,呈現錯誤的片狀分布。
故後續研究建議可採用處理點雲的專業商用軟體,
如:TerraScan 或 SolidWorks 進行幾何對位後,再 進行精度比較。
致謝
本研究承蒙科技部專題計畫(NSC 102-2511-S- 003-035-MY4)補助得以完成,謹申謝忱。
參考文獻
花蓮縣新城鄉七星潭社區發展協會,2015。花蓮縣 新 城 鄉 七 星 潭 社 區 農 村 再 生 計 畫 , https://ep.swcb.gov.tw/ep/File/REGENERATIO N/%E4%B8%83%E6%98%9F%E6%BD%AD
%E7%A4%BE%E5%8D%80%E8%BE%B2%E 6%9D%91%E5%86%8D%E7%94%9F%E8%A 8%88%E7%95%AB_201512081513552712.pdf , 引 用 2018/02/12 。 [Ci Sing Tan Community Development Association, 2015. Rural Rejuvenation Project of Ci Sing Tang Community, Sin Cheng Township, Hualien County, Available at:
https://ep.swcb.gov.tw/ep/File/REGENERATIO N/%E4%B8%83%E6%98%9F%E6%BD%AD
%E7%A4%BE%E5%8D%80%E8%BE%B2%E 6%9D%91%E5%86%8D%E7%94%9F%E8%A 8%88%E7%95%AB_201512081513552712.pdf , Accessed February 12, 2018. (in Chinese)]
陳國永,2004。3D 雷射掃描技術應用於隧道變形 量測之研究,國立中興大學土木工程學系碩士
論文。[Chen, K.Y., 2004. Application of Using 3D Laser Scanning Technology to Analyze the Deformation of Tunnel, Master Thesis, National Chung Hsing University, Taiwan, ROC.(in Chinese)]
曾義星、史天元,2003。三維雷射掃描儀-新一代測 量利器,科學發展月刊,365:16-22。[Tseng, Y.H., and Shih, T.Y., 2003. 3D Laser Scanner – a new generation cutting-edge measuring tool, Science Development, 365: 16-22.(in Chinese)]
蔡富安、陳良健,2010。三維數位城市之建置及應 用,國土資訊系統通訊, 73:18-30。 [Tsai, F.A., and Chen, L.C., 2010. The Reconstruction and Applications of an 3D Digital City Model, National Geographic Information System Communication, 73: 18-30. (in Chinese)]
Ahern, C., and Spring, R, 2015, Handheld 3D Capture, GeoInformatics, 18(2): 18-19.
Allen, P.K., Stamos, I., Troccoli, A., Smith, B., Leordeanu, M., and Hsu, Y.C., 2003. 3D modeling of historic sites using range and image data, 2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422), Taipei, Taiwan.
DotProduct, 2017a. Download Targets, Available at:
https://www.dotproduct3d.com/targets.html , Accessed February 12, 2018.
DotProduct, 2017b. DPI-8 Kit, Available at:
https://www.dotproduct3d.com/ , Accessed February 12, 2018.
FARO, 2011. FARO® Laser Scanner Focus3D Manual,
Available at:
https://doarch332.files.wordpress.com/2013/11/e 866_faro_laser_scanner_focus3d_manual_en.pdf, Accessed February 12, 2018.
García-San-Miguel, D., and Lerma, J.L. , 2013.
Geometric calibration of a terrestrial laser scanner with local additional parameters: An automatic strategy, ISPRS Journal of
Photogrammetry and Remote Sensing, 79: 122- 136, DOI: 10.1016/j.isprsjprs.2013.02.007.
Han, J.-Y., Guo, J., and Jiang, Y.-S., 2013a. Monitoring tunnel deformations by means of multi-epoch dispersed 3D LiDAR point clouds: An improved approach, Tunnelling and Underground Space Technology, 38: 385-389, DOI:10.1016/j.tust.2013.07.022.
Han, J.-Y., Guo, J., and Jiang, Y.-S., 2013b.
Monitoring tunnel profile by means of multi- epoch dispersed 3-D LiDAR point clouds, Tunnelling and Underground Space Technology, 33: 186-192, DOI:10.1016/j.tust.2012.08.008.
Kersten, T.P., Przybilla, H.-J., and Lindstaedt, M., 2016. Investigations of the geometrical accuracy
of handheld 3D scanning systems, Photogrammetrie Fernerkundung Geoinformatio, 5-6: 271-283, DOI:10.1127/pfg/2016/0305.
Thoeni, K., Giacomini, A., Murtagh, R., and Kniest, E., 2014. A comparison of multi-view 3D reconstruction of a rock wall using several cameras and a laser scanner, ISPRS Technical Commission V Symposium, 23 - 25 June 2014, Riva del Garda, Italy.
Thomson, C., Apostolopoulos, G., Backes, D., and Boehm, J., 2013. Mobile laser scanning for indoor modelling, ISPRS Workshop Laser Scanning 2013, 11 - 13 November 2013, Antalya, Turkey.
1Master Student, Department of Geography, National Taiwan Normal University Received Date: Sep. 18, 2017
2.Associate Professor, Department of Geography, National Taiwan Normal University Revised Date: Feb. 12, 2018
3.Master, Department of Geography, National Taiwan Normal University Accepted Date: Nov. 20, 2018
*Corresponding Author, Tel: 886-2-77341683, E-mail: [email protected]
Feasibility Analysis of the Handheld 3D Scanner in 3D Tunnel Survey
Ling-Chia Hung
1Sendo Wang
2*Chuan-Kai Huang
3Abstract
Traditionally, 3D spatial information can only be projected on the 2D maps for visualization due to the limitation of equipment and technology. Benefit from the rapid development of computer hardware and software, 3D visualization of the 3D spatial information can be achieved either by virtual reality (VR) or by augmented reality (AR). The 3D visualization is not only much more ocular for human, but also much more detailed and accurate. Due to the close environment and the spatial limitation, the tunnel survey is usually carried out by the plan table or the theodolite. The 3D tunnel is projected on the 2D map. Although close-range photogrammetry can be used to reconstruct the 3D model and to survey 3D coordinates of the tunnel, it requires many artificial targets as control points. Additional light sources are also necessary for shooting clear photographs. These requirements leads to huge labor work and consumes time. The terrestrial light detecting and ranging (LiDAR) integrated with a camera is capable of acquiring 3D point cloud in an efficient way, and therefore, is very suitable for tunnel survey.
However, the terrestrial LiDAR is too expensive to be adopt by non-surveyors. In addition, due to the winding design of the military tunnel, it will require much more station setups to scan the whole tunnel. The connection of every scanning scene requires a powerful computer and professional human interaction. Recently, the handheld 3D scanners are developed based on the structured light approach, which can rapidly scan 3D point cloud within a short distance (within 4 meters). In this study, we apply a DotProduct DPI-8 handheld 3D scanner and a FARO Focus3D terrestrial LiDAR in the tunnel survey under the 48 Highland in Ci Sin Tan, Hualien. We compare the requirements, the operating procedures, and the results of the handheld 3D scanner and of the terrestrial LiDAR.
The results show that the handheld 3D scanner is very suitable for the tunnel survey.