Volume19, No2, December 2014, pp. 125-145
1國立成功大學測量及空間資訊學系 碩士 收到日期:民國 103 年 03 月 21 日
2國立成功大學測量及空間資訊學系 博士 修改日期:民國 103 年 05 月 07 日
3國立成功大學測量及空間資訊學系 教授 接受日期:民國 103 年 05 月 21 日
4 國立成功大學測量及空間資訊學系 助理教授
*通訊作者, 電話: 06-2383876 ext. 852, E-mail: [email protected]
全波形空載光達資料之波形特徵分析與分類
洪宇佳
1*王正楷
2曾義星
3朱宏杰
4摘 要
隨著光達技術的發展,近年來商業型的空載光達系統已經能夠記錄雷射與地物交會之完整的反射強 度變化,稱為全波形(full waveform)空載光達系統。相較於傳統光達僅能記錄少數的回波響應值(echoes),
全波形光達可完整地記錄雷射光行經物體間的反射強度(intensity),且所記錄的波形除了可推算反射物距 離外,亦隱含了反射物的物理性質,因此全波形光達具有更深遠的應用和潛力。地物表面的反射性質、
幾何結構和粗糙度皆會影響雷射的反射波形,因此透過對全波形光達資料所記錄的波形進行分析,有助 於解讀地物表面的型態,這些性質也提供了地物分類之依據。本研究針對從波形資料中偵測得之所有地 物響應波形,分析各類地物響應波形特徵的特性,並交叉比對不同地物類別之波形特徵的可區分性,以 利於選擇有效的分類特徵,並依據其分析成果,設計一套以波形為主的全波形光達資料分類方法與流程。
實驗資料包含三個廠牌之儀器(Leica、Riegl 及 Optech),根據實驗區的主要地物類別,從正射影像挑 選出欲分類目標類別,即植被、道路、裸露地、建物、草地農地等五類,並針對這些類別進行樣本選取 與波形分類特徵分析。根據單響應及多響應的波形特徵分析結果,選擇適合的分類特徵,接著將選取的 特徵輸入支持向量機(SVM)進行監督式分類。本研究之實驗方法分為三種,包含以響應為基礎、以波形為 基礎與以波形為基礎並加入影像的分類法。實驗成果顯示相較於以響應為主的分類法,以波形為主的方 法能提升約 20%的分類精度,且加入影像後整體精度最高可達 86%,對於地物的三維分類具有相當之潛 力。
關鍵詞:空載光達、全波形光達、波形特徵分類
1. 前言
1.1 研究背景
空 載 光 達 (Airborne Light Detection and Ranging, Airborne LiDAR),亦被稱為空載雷射掃描 系統(Airborne Laser Scanner, ALS),為一主動式的 遙測技術。透過搭載於飛行載具上之雷射掃描儀,
記錄雷射發射訊號與接收之物體反射回傳訊號之 時間差,來計算載具與地物之間的相對距離,並透 過定位定向系統(Position and Orientation System, POS)紀錄飛機之動態軌跡,以直接地理定位的方
式快速獲取高精度之地物三維空間資訊,其資料可 視為對地表面進行密集的三維點取樣之成果,通稱 為點雲(Point Cloud),是現今製作數值高程模型 (Digital Elevation Model, DEM)、數值地表模型 (Digital Surface Model, DSM)、城市模型模塑及森 林調查等應用的重要來源之一(Means et al., 1999;
Rottensteiner, 2003)。光達點雲的分類不僅可用於 地表覆蓋分類,更有利於地表模型的重建、建物偵 測、植物分類等用途。傳統的光達點雲分類,多是 利用其隱含之地物幾何來進行。然而,不同的地物 仍有許多相似之幾何情形,使得分類效果有限,亦 有學者透過光達系統尚提供地物之反射雷射光強
度資訊之輔助進行分類(Song et al., 2002),然其值 可能受到外在因素影響,並不穩定,仍無法得到滿 意之自動分類成果。而全波形資料的出現使我們有 更多指標以區分不同種類地物,對不同類型的地物 更有區別能力。近年來,隨著技術發展,光達系統 已進化成能以密集取樣訊號強度之方式,將地物背 向散射訊號波形完整記錄下來,又稱為全波形光達。
此回傳訊號之波形會根據地物性質而改變,如地表 粗糙程度、反射情形等,故根據地物性質的不同波 形也會隨之改變。全波形光達資料為一連串強度資 訊,使用者必須透過響應偵測及擬合等方式將波形 中隱含之特性萃取出來,並透過分析波形資料特徵,
來解讀地物表面的型態,其中,波形特徵也提供我 們更多的指標來區分不同種類的地物,對不同類型 的地物更有區別能力,因此我們能夠進一步使用此 資訊來進行地物分類。
全波形光達資料大部分應用於森林區及都市 區的地物分類,相較於傳統光達分類,其特性為擁 有波形特性來分辨不同型態或材質的地物。森林區 之應用大部分為樹種分類、立木位置的偵測或是森 林相關參數的計算。另一方面亦被應用於樹種分類 或分辨針、闊葉林等用途上。Neuenschwander et al.
(2009)透過全波形光達資料進行樹種分類,並與多 光譜影像分類之成果進行比較,結果顯示全波形光 達資料之分類結果精度較多光譜影像多 15%,表示 全波形資料特徵有助提升分類精度。此外也有文獻 透過組合不同全波形資料特徵進行分類,其實驗對 於針闊葉林之分類精度可達到約 90%(Liang et al., 2007;Heinzel and Koch, 2011)。Mallet et al. (2011) 比較傳統波形與全波形資料特徵用於地物分類之 能力,實驗中針對地面、建物及植物進行分類,成 果證明全波形對於點雲之萃取能力是優於傳統多 回波光達。Lin et al. (2009)透過波形上之波寬特徵,
改善過濾方法之成果,以提升 DEM 產製品質。此 外,此特徵也被利用於分辨植物及非植物區,並獲
得不錯之成果(Wagner et al., 2008;Alexander et al., 2010)。綜合以上文獻討論,可發現全波形光達之 資訊,如,響應波寬、cross-section、響應振幅等 等參數,對於地物之分類確實有幫助,且其效果優 於傳統光達。
1.2 動機
由於全波形光達資料能反映不同地物之特性,
因此反過來可推論出,回波波形中隱含之特徵能夠 用以表示不同地物類別。根據文獻回顧發現,大部 分所使用之特徵乃針對各個響應所訂定,相當於將 傳統多回波光達之資料點增加額外屬性以提供作 為分類特徵使用,較少人討論到以一整條波形為分 類目標。然而,完整波形中,可能含有光達訊號穿 透過程之資訊,對於地物可以有更多的了解,因此,
本研究即根據全波形之資料特性,對於各地物類別 完整波形形狀做觀察。接著萃取其中所隱含之特徵,
交叉比對不同地物類別之波形特徵的可區分性,以 利於選擇有效的分類特徵,並依據其分析成果設計 一套合適的流程方法,最後以此分類方法進行區分 地物類型,並評估其分類精度,用以驗證全波形光 達特徵是否可區分不同地物。
1.3 研究方法與流程
本研究透過以波形為單元進行觀察,研究方法 流程如圖 1 所示,主要分成四個步驟:資料前處理、
波形特徵萃取、波形特徵分析、地物分類。波形資 料是由多個地物回訊所組成,可視為多個響應疊加 而成,因此前處理之目的是為了要找出各響應於波 形上之位置,並以數學函式擬合,將波形資料以數 學參數描述,以利後續波形特徵之萃取。研究中透 過小波轉換為基礎的波形偵測器進行響應偵測,並 以高斯函數進行波形之擬合,以數學函數模型描述 各響應。
圖 1 研究流程
全波形資料 波形特徵
萃取 波形特徵 資料前處理 萃取
資料前處理 波形特徵 分類成果
分析 波形特徵
分析 地物分類 地物分類
特徵萃取包含三類,分別為響應特徵、整波形 特徵及考慮其空間局部範圍內特徵之平均及標準 偏差等統計特性。響應特徵用以描述各個響應之型 態,此特徵可由擬合之數學參數計算而得,如振幅、
波寬等等。而整波形特性為波形當中各響應之間的 關係,如前後重疊面積、響應之間時間差等等。最 後透過計算空間局部範圍內特徵來了解波形與其 鄰近波形間之關聯性。
接著透過特徵分析,對道路、植被、草地農地、
裸露地及建物等定義之地物類別波形進行特徵分 析。分析方法可分成三個部分進行探討,第一部分 為繪製各類別一維特徵分佈區間以檢視各地物類 別特性間相似性以及特徵之值域,第二部份由三維 特徵空間散佈圖,觀察選定之三特性區分各類別之 成果於空間中之分佈,第三部分為分離度之計算,
將特徵對於各類別之區分性進行量化比較。
根據分析結果提出以波形為基礎之分類方法,
此方法分別考慮單響應與多響應之波形之差異,將 其分開進行分類後,才合併輸出成定義類別。並與 一 般 研 究 文 獻 常 見 以 響 應 為 基 礎 之 分 類 方 法 (Wagner et al., 2008;Alexander et al., 2010;Heinzel et al., 2011)進行比較。另外,波形為基礎加上影像 輔助之分類方法則是用以比較額外特性對於分類 幫助之提升效果。
2. 波形特徵性質
2.1 全波形空載光達系統
光達回波訊號如圖 2(a)所示,為一連續的訊號,
傳統光達記錄上,只偵測出各響應(echo)波峰的位
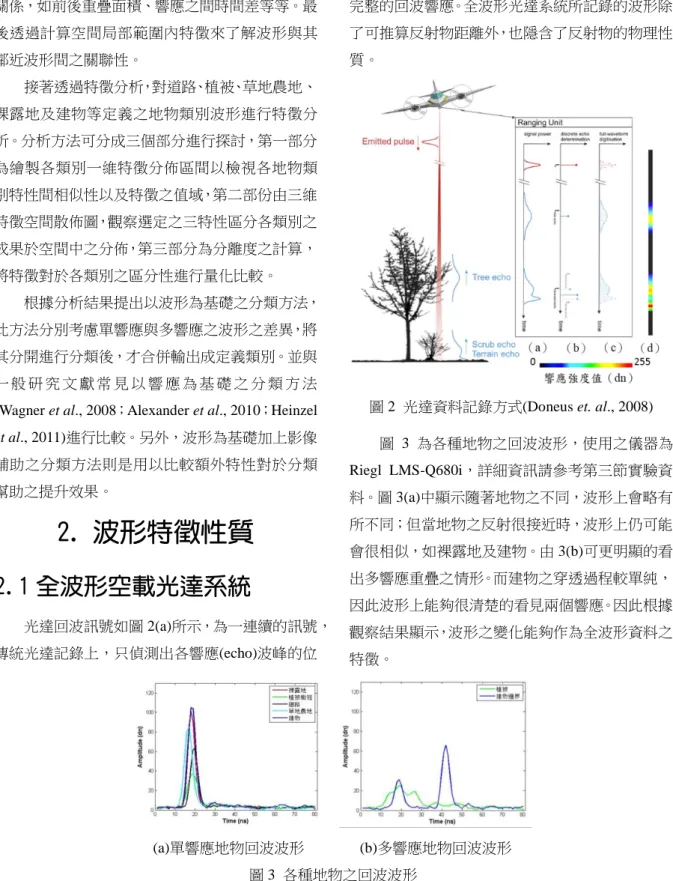
置及其反射強度值(圖 2(b)),通常最多記錄四個回 波。而全波形光達系統則完整記錄回波訊號,連續 密集取樣回波強度值(圖 2(c)),通常其取樣間距為 1 奈秒(nano second, ns)。因此回傳之響應數量較不 受限制,且能自訂響應偵測及擬合方式,來得到更 完整的回波響應。全波形光達系統所記錄的波形除 了可推算反射物距離外,也隱含了反射物的物理性 質。
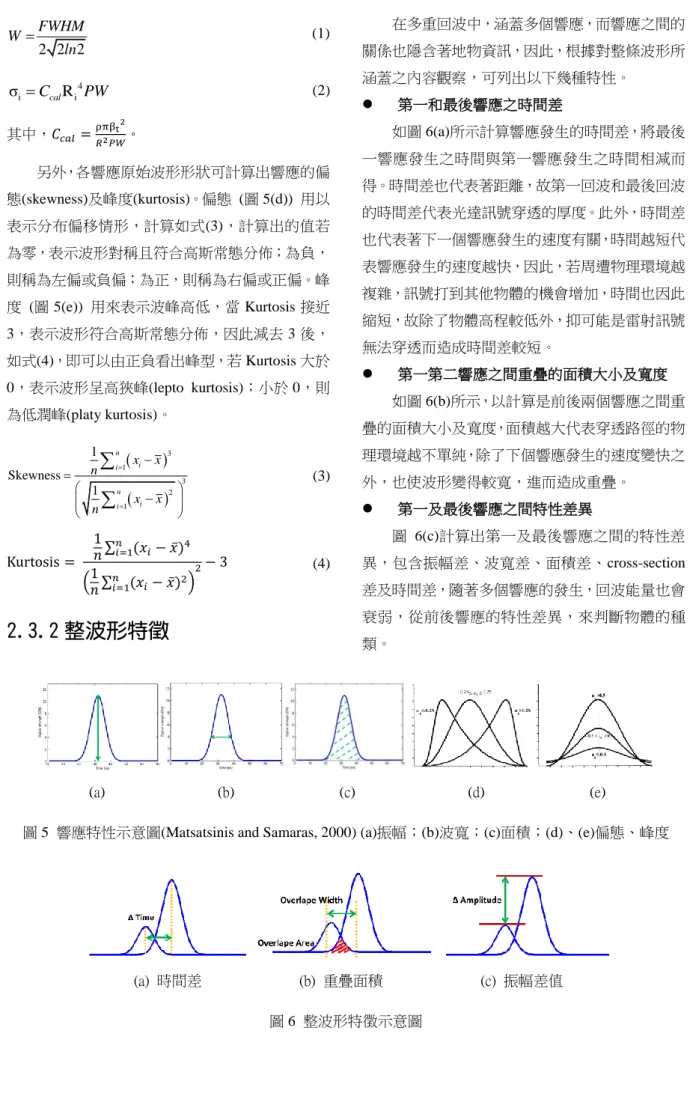
圖 2 光達資料記錄方式(Doneus et. al., 2008) 圖 3 為各種地物之回波波形,使用之儀器為 Riegl LMS-Q680i,詳細資訊請參考第三節實驗資 料。圖 3(a)中顯示隨著地物之不同,波形上會略有 所不同;但當地物之反射很接近時,波形上仍可能 會很相似,如裸露地及建物。由 3(b)可更明顯的看 出多響應重疊之情形。而建物之穿透過程較單純,
因此波形上能夠很清楚的看見兩個響應。因此根據 觀察結果顯示,波形之變化能夠作為全波形資料之 特徵。
(a)單響應地物回波波形 (b)多響應地物回波波形 圖 3 各種地物之回波波形
2.2 波形響應偵測與分解
在進行特徵萃取前,需進行波形的偵測和波形 擬合,從波形資料中尋找地物響應在波形中的位置,
並由選定的數學函數來描述波形中各個響應。分解 的好處乃是這些波形所隱含的資訊,可表現在這些 函數參數上,在分類的應用上,是即為重要的資訊。
波形偵測採用的是以小波轉換為基礎的波形偵測 器(Wang, 2012),如圖 4(a) 和圖 4(b) 。此偵測器 之原理是在小波轉換中運用適當的尺度計算小波 和全波形資料之間的相似性,相似性最高的尺度參 數代表了波峰的位置,如此,即可找出了每一個響 應(Echo)的位置,如圖 4(a)。而每一個響應代表 的是每一個地物的坐標點位。此方法的優點是能夠 找出重疊或是訊號較弱的響應,因此,可以更完整 地找出全波形光達隱含的資訊。波形擬合是透過高 斯函數來模擬波形,原理是將波形的資料套入高斯 函數,並用最小二乘法進行解算,最後找出誤差最 小的套和結果,當作是最佳的擬合解算。圖 4(b) 即為解算成果展示,其中藍線代表原始波型資料扣 掉雜訊的結果,紅線展示擬合後的成果。
2.3 波形特徵性質
波形資料及響應資料當中隱含著豐富之地物 資訊。波形中可透過響應之間的關係來觀察地物之 穿透情形,而響應中可顯示每樣地物對原始訊號所 產生之影響。最後透過計算空間局部範圍內之平均 值及標準偏差為特性,以了解波形之鄰近關係是否 因地物種類而異。因此本節將全波形光達資料中所 隱含之特徵分成三種類:響應特徵、整波形特徵及 空間局部範圍內統計特性,並對於其中各項特徵之 定義、計算方式及其性質做討論,其項目如表 1
所示。
表 1 波形特徵測試項目列表
特徵 項目
響應特徵 振幅、波寬、面積、Cross-section、
偏態、峰度 整波形
特徵
第一響應和最後響應之時間差、面積 差、振幅差、波寬差、Cross-section 差、第一回波第二響應重疊面積、重 疊寬度、波形內響應數
空間局部 範圍內統 計特性
空間局部範圍內振幅、波寬、面積、
Cross-section 和整波形特徵之平均 值及標準偏差
2.3.1 響應特徵
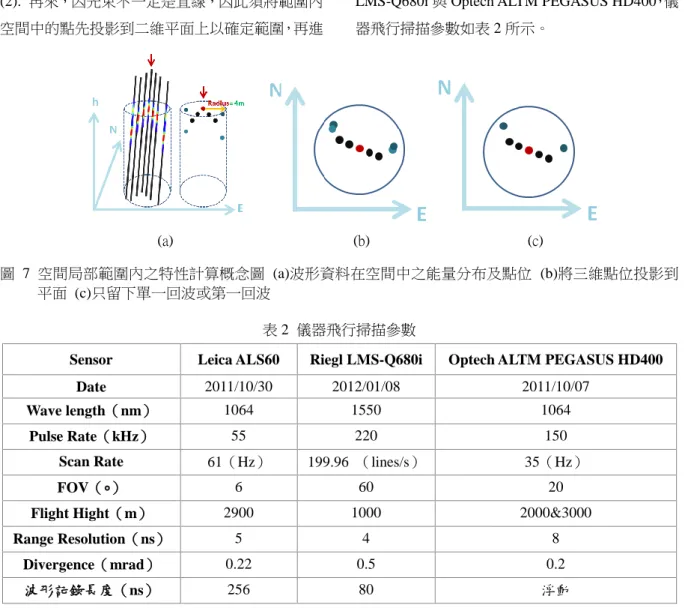
響應特徵由波形擬合後所得之高斯擬合參數 而得,此類特徵可用來描述響應每個響應中的物理 特性與幾何特性。振幅為響應的能量最大值,可用 以表示響應的強度,如圖 5(a)。波寬透過響應的半 高寬度(Full width at half maximum, FWHM)帶入 式(1)計算而得(Alexander et al., 2010),如圖 5(b)。
面積如圖 5(c)所示,代表訊號和地物作用過程產生 的能量累積。Cross-section 由式(2)算出,此特性與 掃描起到物體的距離 R、振幅 P、波寬 W、光速發 散寬度(divergence angle) 及地物反射率 有相關,
可反映出地物和訊號之間作用面積(Wagner et. al., 2008)。式(2)中Ccal為一常數值,其中反射率會根據 不同波長之訊號而產生改變,通常透過測定實驗區 內柏油路之反射率來得到(Wagner et al., 2006;
Alexander et al., 2010)。實驗所使用的儀器廠牌為 Leica、Riegl 及 Optech,其中,Leica 和 Optech 儀 器 波 長 皆 為 1064nm , 柏 油 路 之 反 射 率 透 過 PSR-1100 光譜儀測定,得其值為 0.17,Riegl 之儀 器 波 長 為 1550 nm , 根 據 文 獻 中 測 定 之 結 果 (Alexander et al., 2010),以 0.25 帶入計算Ccal。
(a) 以小波轉換為基礎的波形偵測器(Wang, 2012) (b) 高斯函數波形擬合成果 圖 4 波形響應偵測與分解
2 2 2 W FWHM
ln
(1)
4
i i
σ CcalR PW (2)
其中,𝐶𝑐𝑎𝑙=ρπ 𝑅 𝑃𝑊。
另外,各響應原始波形形狀可計算出響應的偏 態(skewness)及峰度(kurtosis)。偏態 (圖 5(d)) 用以 表示分布偏移情形,計算如式(3),計算出的值若 為零,表示波形對稱且符合高斯常態分佈;為負,
則稱為左偏或負偏;為正,則稱為右偏或正偏。峰 度 (圖 5(e)) 用來表示波峰高低,當 Kurtosis 接近 3,表示波形符合高斯常態分佈,因此減去 3 後,
如式(4),即可以由正負看出峰型,若 Kurtosis 大於 0,表示波形呈高狹峰(lepto kurtosis);小於 0,則 為低潤峰(platy kurtosis)。
3 1
3 2 1
1 Skewness
1
n i i
n i i
x x n
x x n
(3)
Kurtosis =
𝑛 ∑1 𝑛𝑖=1(𝑥𝑖− 𝑥̅)4
(1
𝑛 ∑𝑛𝑖=1(𝑥𝑖− 𝑥̅)2)2
− 3 (4)
2.3.2 整波形特徵
在多重回波中,涵蓋多個響應,而響應之間的 關係也隱含著地物資訊,因此,根據對整條波形所 涵蓋之內容觀察,可列出以下幾種特性。
第一和最後響應之時間差
如圖 6(a)所示計算響應發生的時間差,將最後 一響應發生之時間與第一響應發生之時間相減而 得。時間差也代表著距離,故第一回波和最後回波 的時間差代表光達訊號穿透的厚度。此外,時間差 也代表著下一個響應發生的速度有關,時間越短代 表響應發生的速度越快,因此,若周遭物理環境越 複雜,訊號打到其他物體的機會增加,時間也因此 縮短,故除了物體高程較低外,抑可能是雷射訊號 無法穿透而造成時間差較短。
第一第二響應之間重疊的面積大小及寬度 如圖 6(b)所示,以計算是前後兩個響應之間重 疊的面積大小及寬度,面積越大代表穿透路徑的物 理環境越不單純,除了下個響應發生的速度變快之 外,也使波形變得較寬,進而造成重疊。
第一及最後響應之間特性差異
圖 6(c)計算出第一及最後響應之間的特性差 異,包含振幅差、波寬差、面積差、cross-section 差及時間差,隨著多個響應的發生,回波能量也會 衰弱,從前後響應的特性差異,來判斷物體的種 類。
(a) (b) (c) (d) (e)
圖 5 響應特性示意圖(Matsatsinis and Samaras, 2000) (a)振幅;(b)波寬;(c)面積;(d)、(e)偏態、峰度
(a) 時間差 (b) 重疊面積 (c) 振幅差值 圖 6 整波形特徵示意圖
2.3.3 空間局部範圍內統計特性
透過統計鄰近空間局部範圍內響應特性和整 波形特性之平均和標準偏差來做為範圍內統計特 徵。此特性之計算方式由圖 7 所示: (1).首先決定一 點作為起始圓心,並決定合適的半徑,以計算一個 圓柱範圍內波形資料的特性。圖 7(a)左邊圓柱中的,
線條代表每一個光達訊號的光束,彩色的部分為響 應強度值,紅色最強,越接近藍色,其能量逐漸變 弱,黑色代表能量為零。又每個響應可透過波形偵 測找出地物坐標點,故每個響應可視為一個點位,
同理,圖 7(a)左邊圓柱之能量可視為右邊圓柱之點 位。圖中紅點代表起始圓心,半徑定義為最小地物 類別範圍邊長的一半,經人工觀察後,選定實驗區 中建物屋頂為最小範圍之地物類別,故定義屋頂最 小寬度的一半作為半徑,經人工測量後訂為四公尺。
(2). 再來,因光束不一定是直線,因此須將範圍內 空間中的點先投影到二維平面上以確定範圍,再進
行進一步的計算,如圖 7(b)。(3). 最後,因我們無 法得知光達穿透的情形,只能透過影像來推測光達 最先打到的物體,也就是單一回波或第一回波打到 的位置,其餘的多重回波則難以確定打到的是何種 物體,故計算上只選擇單一回波或多重回波的第一 回波點,做為每條波形的代表,來計算範圍內之特 性,如圖 7(c)。最後,逐一的計算空間局部範圍內 響應特徵和波形特徵之平均值及標準偏差作為範 圍內之統計特性及平均回波數,此特性可用以了解 波形與其空間局部鄰近波形特性之關聯性,如樹林 區之穿透性較高,則其空間局部範圍內之平均回波 數會大於建物區。
3. 實驗資料
實驗區研究資料乃使用三種廠牌型號之全波 形光達系統 掃描而 得, 即 Leica ALS60 、Riegl LMS-Q680i 與 Optech ALTM PEGASUS HD400,儀 器飛行掃描參數如表 2 所示。
(a) (b) (c)
圖 7 空間局部範圍內之特性計算概念圖 (a)波形資料在空間中之能量分布及點位 (b)將三維點位投影到 平面 (c)只留下單一回波或第一回波
表 2 儀器飛行掃描參數
Sensor Leica ALS60 Riegl LMS-Q680i Optech ALTM PEGASUS HD400 Date 2011/10/30 2012/01/08 2011/10/07
Wave length(nm) 1064 1550 1064
Pulse Rate(kHz) 55 220 150
Scan Rate 61(Hz) 199.96 (lines/s) 35(Hz)
FOV(∘) 6 60 20
Flight Hight(m) 2900 1000 2000&3000
Range Resolution(ns) 5 4 8
Divergence(mrad) 0.22 0.5 0.2
波形記錄長度(ns) 256 80 浮動
此實驗區為山區聚落,地形包含山地平坦地及 河流,山區之地物大部分為植被,平坦地因有人群 居住,因此地物涵蓋多元。由於缺乏現地調查,能 了解之細節有限,從本研究所使用之光達解析度約 為 0.6~1.2 公尺,又點雲密度約為 1.1~4.2 點每平方 公尺,因此面積太小或是高程差異不大之物體皆不 容易分辨。綜合以上,我們定義出道路、植被、草 地農地、裸露地及建物等五種地物類別,進行後續 之探討。若波形資料中只有一個響應,則為單響應 波形;若含二個以上之響應,則稱為多響應波形。
在實驗中,多響應波形之類別由波形內第一個響應 所接觸到之地物作為代表,如第一回波接觸到建物 邊界,則整條波形資料之類別即為建物邊界,如第 一回波接觸到植被,則整條波形資料之類別即為植 被。Jutzi and Stilla (2003)指出,多響應的點絕大多 數落在建物邊界和植物上,因此資料中具有多響應 特性之點,在分類的策略上僅分成建物和植被二 類。
4. 全波形特徵分析
4.1 特徵分析方法
在分類中,通常可以依照地物(欲分類之物體) 所具有的各個特徵,展繪在特徵空間(Feature Space) 上,將特徵空間想像成 n 維直角座標系統,此時若 假設各特徵之間為等權不相關,則每筆資料均可以 表示成特徵空間中的一個向量或坐標點,並可用多
維度直角座標系統來表示。其中,為了便於分析並 簡化圖形,通常只顯示到三維(包順安,1999)。如 圖 8 (a)所示,可用任三種特徵組成三維空間來表示 點位散佈圖,圖中各點表示各資料點在特徵空間中 的位置,顏色代表不同地物類別。再者,可針對每 一項特性,描繪各類在每一個特徵下的機率密度分 佈圖(圖 8 (b) )以觀察地物在各特徵之分佈情形。
由圖 8 可知,在特徵空間中各類別之間並非完 全獨立分離的,各類別之間多少會發生重疊交錯之 情形,透過計算分離度來量化特性間分佈之距離,
能客觀估算特徵對於各類別之間的分離性是如何。
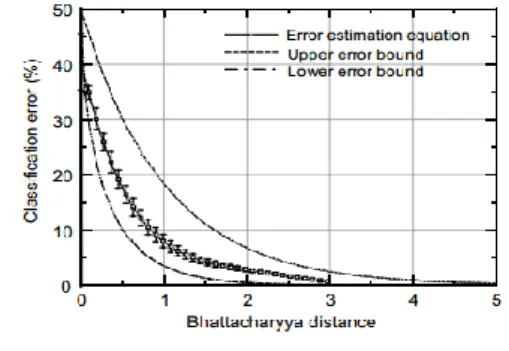
其概念為計算兩類別間最小錯誤機率等價的最大 機率距離量(徐百輝及曾義星,2000)。研究中採用 Bhattacharyya distance (B-distance) 來 進 行 實 驗 (Landgrebe and Biehl, 1997)。B-distance 是根據貝式 誤差(Bayes Error)推導之產物,定義為式(5),其中 Mi及 Ci分別為樣本 xi之平均值向量及協變方矩陣。
Bhattacharyya Distance 不具任何單位,其值介於 0 到無窮大。B-distance 越大,表示特性之區別性越 好,使得分類誤差下降,整體精度提升(Choi and Lee, 2003),如圖 9 所示,圖中 X 軸為 B-distance;
Y 軸為分類錯誤比例,隨著 B-distance 增加,其誤 差比例也逐漸下降,當 B-distance 大於 0.8 後,其 分類錯誤之比例已低於 10%,且其下降速率也趨於 和緩。當 B-distance 大於 5 後,分類誤差比例已趨 近於 0,這表示特徵可將類別完全區分開來。
(a)特徵空間三維點位散佈圖 (b)一維特徵機率密度分佈圖 圖 8 單響應特徵分析示意圖
1
1/2
1 1 / 2
8 2 2
T i j i j
ij i j i j
i j
C C C C
B M M M M ln
C C
(5)
圖 9 Bhattacharyya Distance 與分類精度之關係圖 (Choi and Lee, 2003)
4.2 單響應波形特徵分析
單響應波形所涵蓋之類別為道路、植被樹冠、
草地農地、裸露地及建物,而其特徵包含響應特徵 外,另加入空間局部範圍內之平均回波數之特性。
由於一個單響應之波形皆只代表一樣地物,因此,
若平均可能會影響其特性反映,而平均回波數並不 影響其物理性質。故除了空間局部範圍內之平均回 波數之特性外,沒有考慮其餘響應特徵之空間局部 範圍內統計特性。以下即透過特徵分析方法對每項 地物之波形特性進行單響應波形特徵分析。
4.2.1 各類別一維特徵機率密度分 佈圖
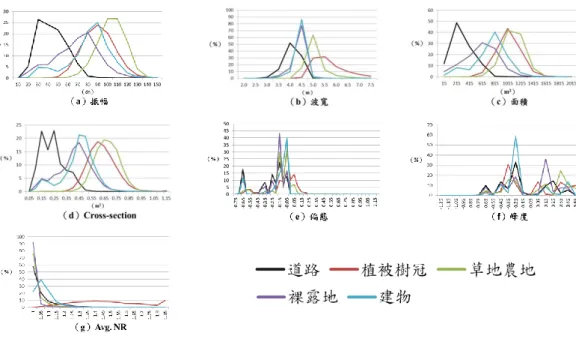
圖 10(a)~(g)為單響應之一維特徵機率密度分 佈圖,其中 X 軸為特徵值,Y 軸為機率。以下透 過各類別之峰值位置、分佈範圍及與各類別之間重 疊比例之多寡三項指標做說明:
峰值位置代表的是每樣地物最可能出現之值,
其位置偏左代表地物於該特徵之值較小,偏 右則代表特徵值較大。理論上同種類樣本之 峰值應只有一個,若出現兩個峰值則表示樣 本可能內存在兩種類型之地物。
分佈範圍用以表示地物類別於某特徵軸向所 分佈範圍,分佈範圍越廣代表特性之分佈範 圍較不集中,也就是該地物樣本之特徵較不 一致且物理性質不穩定,容易使得其特徵分 佈與其他地物類別重疊部分增加,降低區別 效果。反之,若分佈範圍很小,則代表其樣 本峰值很一致,
重疊比例可表示地物類別間特徵分佈範圍相 同之比例多寡。重疊比例越高,代表特徵分 佈越相似,故若兩類別之間重疊率越高,越 不容易區分此兩類別,反之,重疊比例越少 則代表兩類別之物理特性相差甚遠,區分效 果較顯著。圖 10(a)-(g)為單響應特徵分布圖,我們依據以 上三項指標來分析判斷各特性之有效性。在響應振 幅(a)的部分,顯示了道路與草地農地兩類別之區分 性較高,而裸露地、建物與植被樹冠之區分性則較 低。在響應波寬(b)中,該特性對於區分植物與非 植物最有幫助,而於道路與非道路間有些許區分作 用。相較於響應振幅(a),響應面積(c)在建物與植 被樹冠類別之重疊比例下降,稍稍提高可分辨性。
Cross-section(d)中可發現道路、裸露地與建物類 別之分佈中出現兩個峰值,表示此三類別樣本中可 能皆具有兩種不同類型的地物存在。Cross-section 對於道路與植物類別之區分性較高,對於裸露地與 建物類別之區分性則較低。
圖 10(e)、(f)為各類別峰度及偏態之一維特徵 機率密度分佈圖,兩特徵皆與響應形狀有關。圖中 兩特性對於區別這五類樣本的效用較不顯著,大部 分的波形為右偏,峰度都符合標準高斯分布波形的 範圍內,雖然看不出各類別之間原始回波形狀的明 顯差異,卻能用以證明透過高斯方式來擬合光達之 波形是合理的。
圖 10(g)為各類別之空間局部範圍內平均回波 數之一維特徵機率密度分佈圖,由分布範圍來看,
道路、裸露地及草地農地周圍區域內多為單響應,
其平均數多為 1。建物區之邊界有機會出現多響應,
因此,其類別中部分樣本之空間局部範圍內平均回 波數高於 1。植被樹冠之空間局部範圍內平均回波 數分布區間最廣,因其根據不同植被密度或樹種變 化等等因素都可能造成回波數之變化,故其空間局 部範圍內平均回波數之值偏高且較不穩定。於此特 性中,對於區別植被樹冠及草地農地有一定之幫助,
且對於區別裸露地及建物也有一定之效果。
圖 10 單響應特徵分布 (a)~(f)地物響應特徵分布圖;(g)空間局部範圍內之平均回波數
4.2.2 各類別特徵空間三維點位散 佈圖
經一維特徵機率密度分佈分析之結果,選擇響 應波寬、cross-section 及空間局部範圍內平均響應 個數來繪製特徵空間散佈圖。圖 11 為各類別特徵 空間中波寬、cross-section 及空間局部範圍內平均 回波數之散佈圖。圖中顯示,特徵空間中波寬、振 幅及 cross-section 之散佈情形,圖中顯示植物(植被 樹冠、草地農地)與其他類別(道路、裸露地、建物) 可以很容易的區別開來。此外,透過範圍內平均回 波數可提高植被樹冠及草地農地之可區分性。而道 路與建物之間也有相同之情形,且裸露地之特徵點 散佈於道路與建物之間,使得此三種種類之樣本特 徵點不易區分開來。反之較能清楚分辨的為植物與 非植物。其餘三種非植物類別則不易分辨,可能是 地形較複雜之緣故,造成波形變化起伏較多。再者 可能因為裸露地包含了河床及土壤地,在本質上即 有些許差異,造成裸露地的分布較為分散,又有些 裸露地類別的材質和柏油路類似,因此造成其與有 部分重疊之結果。而建物和道路具有不錯的分離程 度,建物之振幅值雖與道路有重疊的部分但大部分 之值都較大,唯獨其仍與裸露地有部分的重疊。就 各類別特徵空間三維點位散佈圖而言,三維展示較 一維更能了解特徵之分佈情形及使區別能力之優
劣視覺化,而分析結果與一維特徵機率密度分佈分 析之結果相同。
●:道路 ●:植被樹冠 ●:草地農地
●:裸露地 ●:建物屋頂
圖 11 特徵空間中波寬、空間局部範圍內平均回波 數及 Cross-section 分布圖
4.2.3 各類別特徵分離度
將所有特徵都用以計算 B-Distance,如表 3,
成果顯示道路與裸露地區分性較低(接近於 1),而 道路與建物屋頂、植被樹冠與草地農地、及裸露地 與建物屋頂之區分性次之(約低於 2),其他地物間 的區分性皆相當好,表示使用這些特徵對於區分本 文所定義的類別是有效的。
4.3 多響應波形特徵分析
多響應波形類別為建物及植被兩類,其特徵包
含了響應特徵、整波形特徵及以上特徵之空間局部 範圍內之平均值及標準偏差。多響應特徵以波形中 第一回波之響應為代表,因其他回波之響應可能有 重疊的情形,造成看不出原始響應的波形,因此沒 有針對多響應計算波形進行響應偏態及峰度。故響 應特性為響應振福、波寬、面積及 cross-section。
由於多響應特徵較多種,故我們以下先以一維特徵 機率密度分佈圖觀察波形特徵區分此兩類別之效 用,再透過計算分離度及相關係數,找出區分性較 高之特性展示特徵空間三維點位散佈圖,以進行特 徵分析。
4.3.1 一維特徵機率密度分佈圖
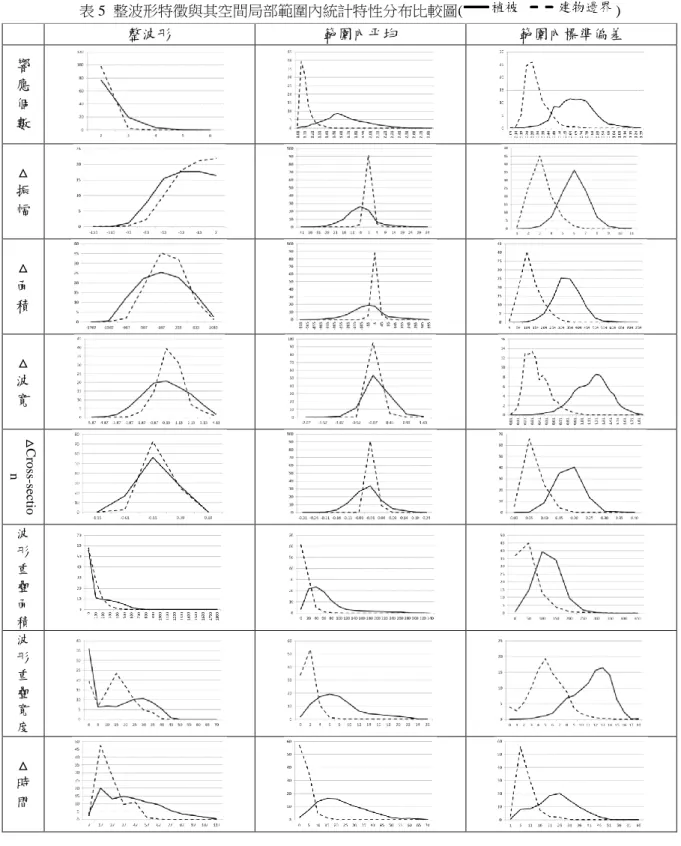
多響應之波形特徵分別列於表 4 及表 5,表中
欄代表特性類型,列代表計算之特性。第一欄分別 為響應特徵及整波形特徵,第二欄為第一欄特性空 間局部範圍內之平均,第三欄為第一欄特性範圍內 之標準偏差。表 4 為波形響應特性及其空間局部範 圍內統計特性,表中可看出第一欄響應特徵特性分 佈區間重疊性很高,其中分離度最高為響應波寬,
其重疊比例仍超過 50%,因此,響應特徵對於此兩 類別之區分性不高。第二欄可看出計算空間局部範 圍內之平均有助於增加某些特徵之區別性,如響應 波寬,但對於區分性不高之特性,如響應振福及響 應面積,則幫助不大,區分性提升效果較不顯著。
第三欄中可看出計算特徵範圍內之標準偏差對於 所有特徵之區別性皆有提升之作用,使兩類之間重 疊性降低。
表 3 整合所有單響應特徵之 B-Distance
表 4 響應特徵與其空間局部範圍內特計統特性分布比較圖( )
波形 範圍內平均 範圍內標準偏差
振 幅
面 積
波 寬
Cross-section
單響應特徵 道路 植被樹冠 草地農地 裸露地 建物屋頂
道路 0 7.458 7.191 1.151 1.873
植被樹冠 0 1.948 5.994 5.548
草地 0 4.419 5.227
裸露地 0 1.983
建物屋頂 0
表 5 為波形整波形特性及其空間局部範圍內 統計特性。表中第一欄為整波形特徵特性分佈區間,
可發現兩類別間之特性分佈重疊性也很高,此外建 物邊緣之特徵值分佈較樹林區集中,這代表樹林區 之特徵變化較多。因此推論植被之樣本種類較多,
因此特徵值分佈較廣,而建物邊緣樣本間相似性較 高,其特徵值分佈也較集中。植被區有部分特性與 建物邊緣類似,因此造成分佈區間之重疊。在第一 欄中,無區分性特別顯著之特徵。第二欄為空間局 部為範圍內特徵之平均值,其中某些特性,如響應 前後重疊面積、重疊寬度、時間差及回波數之範圍 內平均值等,特徵分佈區間較集中,尤其是建物邊 界,且兩類樣本特性分佈區間之重疊性降低。第三 欄為空間局部範圍內之特徵標準偏差,其特徵區分 性皆有明顯之提升,且分佈皆很相似,為建物邊界 之特性空間局部範圍內標準偏差小於值被之特性 空間局部範圍內標準偏差,這是合理的延續第二欄 之計算,平均值分佈較集中也因此標準偏差較低。
4.3.2 特徵分離度
由章節 4.3.1 可發現,多響應之特徵個數很多,
且每個特徵之分佈區皆很類似,因此,由特性分佈
圖不易找出最有效之特徵,故透過計算 B-Distance 以篩選出最具效果之特徵,以進行三維之特徵分析。
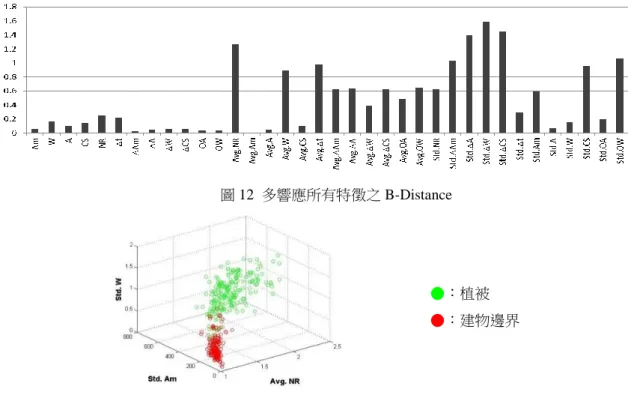
圖 12 為建物邊界及植被於各特徵中之 B-Distance,
X 軸為特徵名稱,Y 軸為 B-Distance。圖中可看出 大 部 分 以 範 圍 內 作 為 統 計 算 出 的 特 徵 其 B-Distance 明顯大於整波形特性及響應特性。根據 圖 9,以門檻 0.8 做為區分效果顯著與否之判斷(如 圖 13 中虛線所示),最後選出效果較顯著之特徵為:
Avg. NR、Avg. W、Avg. 、Std. 、Std. 、 Std. 、Std. C 、Std. CS 及 Std. Ow。由此九個 特徵算出之 B-Distance 為 7.485,具有顯著之區分 效果。最後,將這九個特徵當作是特徵選取之結果,
並使用於後續之多響應資料分類。
4.3.3 特徵空間三維點位散佈圖
根據 4.3.2 所選出之效果較顯著之特徵進行三 為點為散佈圖之繪製,經由測試選出分離效果最佳 之組合,如圖 13 所示,圖中三軸分別為範圍內平 均回波數、範圍內面積差值標準偏差及範圍內波寬 差值標準偏差,其中植被樹冠為綠色點,建物邊界 為紅色點,圖中顯示大部分之兩類樣本皆可清楚被 區別。
圖 12 多響應所有特徵之 B-Distance
●:植被
●:建物邊界
圖 13 特徵空間中空間局部範圍內之平均回波數、面積差值標準偏差及波寬差值標準偏差分佈圖
5. 分類方法與分類器
5.1 分類器
根據特徵分析結果,部分波形特徵對於區別不 同地物類別明顯具有幫助,因此將這些特徵,透過 分類器進行分類,以分類成果精度優劣來驗證波形 特徵對於區別地物類別之有效性。在研究中選用之 分 類 器 為 支 持 向 量 機 (Support Vector Machine, SVM),其原理為透過最佳化工具找出高維度向量 空間中最佳的超平面(optimal separating hyperplane, OSH ),使類別間區分距離最遠,以達到最佳分類 效果。SVM 又可分為線性及非線性,在研究中我 們使用的是非線性之 SVM,其透過核函數(kernel)
將資料投射到更高為度的特徵空間,用以解決更複 雜的分類問題,研究中所使用之核函數為 RBF 核 函數。
5.2 分類方法
研究中嘗試比較分析三種分類方法:方法一是 以響應為主(echo based)的分類方法,是研究文獻常 見的分類方法(Wagner et al., 2008;Alexander et al., 2010;Heinzel et al., 2011);方法二是本研究提出 的新方法其概念是以完整波形做考量(waveform based) ;方法三則為方法二加上影像之 RGB 資料 輔助分類。而在各分類方法中所使用之樣本皆相同,
並根據不同方法選用不同的特性,經由分類器進行 分類,最後輸出的成果包含道路、植被樹冠、草地 農地、裸露地及建物屋頂等五類別如圖 14 所示。
以下依序介紹三種分類方法及其選用之特徵。
方法一:以響應為基礎
以響應為基礎之分類方法,是以響應偵測時所 找出的每個響應作為分類單元以進行分類並不包 含波形之間的關係,因此,我們訂定其分類時所使 用的特性為響應特性,然而多響應中之波形為每個 響應疊加之成果,因此無法計算每個響應之峰度及 偏態。因此為了使特性一致,方法一用以分類之特 性為振幅、波寬、面積及 cross-section,不使用峰 度及偏態。由於每個響應又相當於一回訊點,因此,
方法一之分類方式可視為對三維點雲進行分類,又 被稱為三維分類(3D classification),其中響應特性 可視為每個點所增加之特徵。此方法是研究文獻常 見的分類方法(Wagner et al., 2008;Alexander et al., 2010;Heinzel et al., 2011) 。在此研究中,方法一 之分類流程如圖 14(a)所示,首先將全波形資料進 行響應偵測與分解,並進行波形特徵萃取計算所需 之特性,選定樣本輸入分類器進行監督式分類。最 後輸出結果為道路、植被、裸露地、建物與草地農 地等五類。
方法二:以波形為基礎
根據特徵分析結果可知,單響應與多響應中除 了波形上有明顯差異外,其波形資料中所涵蓋之性 質並不相同,如多響應波形多了其波形中響應之間 的關係,因此在研究中採取將單響應與多響應之波 形分開來進行分類之策略。此方法之分類單元為波 形資料中所記錄之一條條波形。其中,單響應波形 於分類中所使用特徵分別為響應特性及空間局部 範圍內平均回波數。若為多響應之資料,則以該波 形中之第一響應作為代表,其特性如章節 4.3.2 最後選出效果較顯著之特徵分別為 Avg. NR、Avg.
W、Avg. ∆T、Std. ∆Am、Std. ∆W、Std. ∆A、Std.
∆CS、Std. CS 及 Std. Ow。分類流程如圖 14(b)所 示,首先將全波形資料進行響應偵測與分解,並進 行波形特徵萃取計算所需之特性。在此先不加入影 像資訊,因此下一步為將波形資料區分為單響應與 多響應之波形,分別選定樣本並進行訓練。由於將 這兩類型資料分開處理,我們可以獲得更仔細之類 別,如建物之單響應為建物屋頂,多響應則為建物 邊界,而植被之單響應及多響應之第一回波則稱為 植被樹冠,多響應之其餘響應則為植被下層,如此 之分類結果對於找尋建物邊界或是計算植被厚度 之應用可提供額外之資訊。最後將多響應及單響應 之分類結果合併,建物邊界與建物屋頂合併為建物,
植被樹冠及植被下層則合併為植被,則最後輸出類 別與方法一相同,分別為道路、植被、裸露地、建 物與草地農地等五類。
表 5 整波形特徵與其空間局部範圍內統計特性分布比較圖( )
整波形 範圍內平均 範圍內標準偏差
響 應 個 數
△ 振 幅
△ 面 積
△ 波 寬
△Cross-section
波 形 重 疊 面 積 波 形 重 疊 寬 度
△ 時 間
方法三:以波形為基礎並加入影像輔助 以方法二之分類方式加上影像色彩資訊(R、
G、B),進行影像輔助之分類。由於缺少方位資 訊,因此研究僅以內插方式由正射影像獲取色彩資 訊,此正射影像為廠商所提供,是以光達掃描時所 拍之航照影像後製而成。
5.3 地真資料
由於測試區廣大且包含的地物類型相當廣泛,
我們在測試區內人工選取部分資料當作地真資料,
由於並未進行現地調查,地真資料為參考光達掃描 時拍攝影像後製之正射影像並經由人工判釋選取,
統稱為檢核樣本,並隨機選取檢核樣本內 1%作為 訓練樣本,作為分類器之分類依據。檢核樣本用以 檢驗分類器之分類成果精度,所選取之各廠牌儀器 資料之檢核樣本分佈如表 6 所示。其中,Optech 廠牌之資料因缺少正射影像,故由掃描日期最接近 之 Leica 資料所產製的正射影像作為參考,進行樣 本選取。在三家廠牌資料的選取部分,各類別樣本 於資料中的分佈大致上相同,表示各廠牌之資料樣 本所對應之地物並不會相差太多,因此,可用以比 較不同廠牌資料間最後之分類成果。
(a) 以響應為基礎(方法一)
全波形資料
特徵萃取特徵萃取
單響應 多響應
分類器 分類器
響應類別 道路 建物屋頂
草地農地 裸露地 植被樹冠
輸出類別
裸露地 道路 草地農地 建物
建物屋頂 建物邊緣
植被 植被樹冠 植被下層
響應類別 波形類別
植被 建物邊緣
植被樹冠 植被下層 影像資訊
(RGB) 資料前處理 資料前處理
(b) 以波形為基礎(方法二&方法三) 圖 14 分類流程圖(a、b 圖)
6. 研究成果與分析
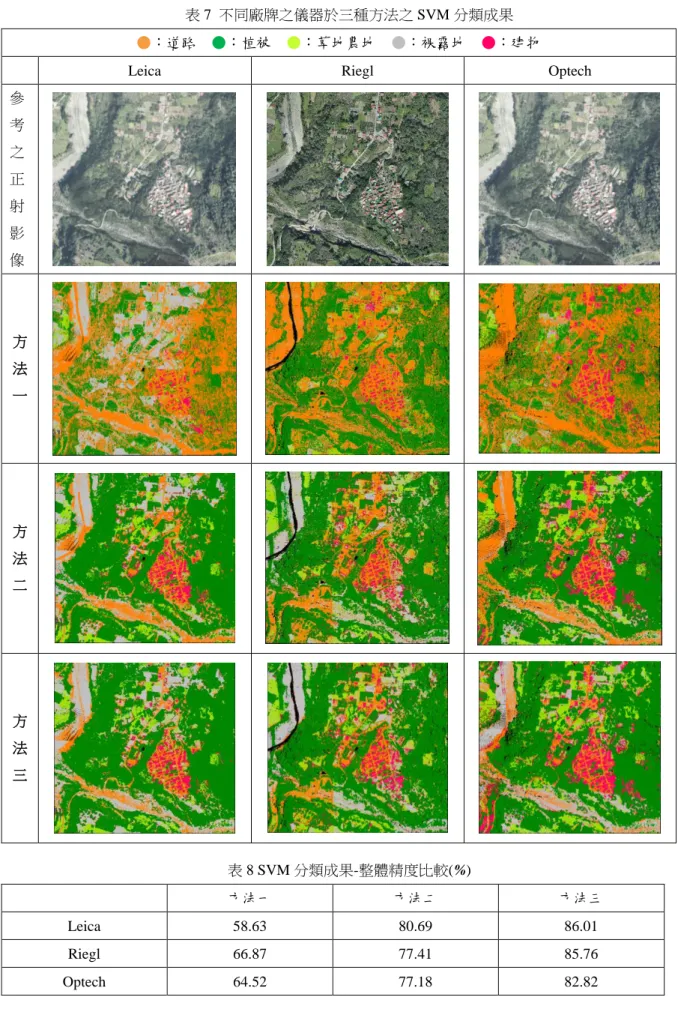
實驗成果如表 7 所示,其內容為不同廠牌之儀 器資料於三種方法下使用分類器進行分類,其中三
種 廠 牌 儀 器 分 別 為 Leica ALS60 、 Riegl LMS-Q680i 及 Optech ALTM PEGASUS HD400。方 法 一 、 方 法 二 及 方 法 三 分 別 為 echo-based 、 waveform-based 及 waveform-based 加上色彩資訊 輔助分類。使用之分類器為 SVM。成果精度如表 8 所示。
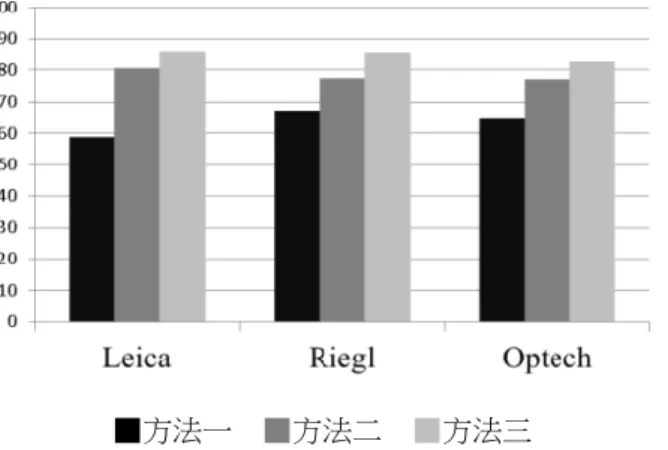
由圖 15 中可以發現,隨著方法改變,各廠牌 資料之分類精度改變趨勢皆相同,其中,方法二及 方法三相對於方法一精度明顯有顯著提升,而相較 於 NBC 分類器,SVM 之成果皆能達 80%,也應證 了其非線性分類的可靠度。方法一的整體精度較差,
平均約為 60%,其中精度較高的為 Optech 於 SVM 分類器及 Riegl 於 NBC 分類器之成果,可達 67%,
但精度仍遠低於方法二及方法三。故整體來說,此 結果驗證了透過波形為基礎的分類方式之分類效 果,較以響應為基礎之分類方法來的好。此外,加 入影像資訊對於提升分類結果也有一定之幫助,我 們可以看到在 SVM 之分類成果中(表 8),其顯示無 論何種儀器對於方法三之精度皆有效提升,而其中 Riegl 提升最多,約為 8%。
接下來,我們針對整體成果精度最佳之 Leica 儀器資料使用 SVM 分類器之分類成果,進一步分 析方法二與方法三中各類地物之分類情形。表 9 為方法一之成果精度,在 4-2 節單響應特性分析中,
我們發現響應特徵能夠將植物與非植物做分別,從 各類別的使用者與生產者精度可以看出,裸露地、
道路與建物間容易被分類錯誤,是因為其材質廣泛,
會有相似的情況發生,如:道路與建物皆有可能為 水泥材質。而少了波形特性中之回波數這個重要的 指標,造成建物邊界不容易被偵測,且植被與草地 農地也容易有混淆之情形。
表 10 為方法二之成果精度,其中,根據使用 者與生產者精度我們可以發現其植被之分類成果 最好,皆達 95%以上,而草地農地次之,精度達 80%,而裸露地精度較差。其中裸露地與道路易有 誤判之情形,其誤判比例為 29.82%,其餘較多部 分則誤判為草地農地,比例為 7.2%,造成錯誤分 類的原因可能為,裸露地與道路之材質相近,如水 泥路與河床石塊,故其散射情形也會很類似,進而 最後輸出
草地農地 裸露地 道路
植被 建物
全波形資料
特徵萃取特徵萃取 資料前處理 資料前處理
分類器
造成誤判之情形。而裸露地錯誤分類之原因可能是 裸露地樣本中多少含有植物,如河床石縫中之雜草,
亦或是枯黃雜草在影像上不易辨識,造成裸露地錯 分為草地農地之情形。另外,可以發現建物之生產 者精度也稍微偏低,這可能是因為建物屋頂之材質 相當多元,因此這些材質當中可能有部分與道路及
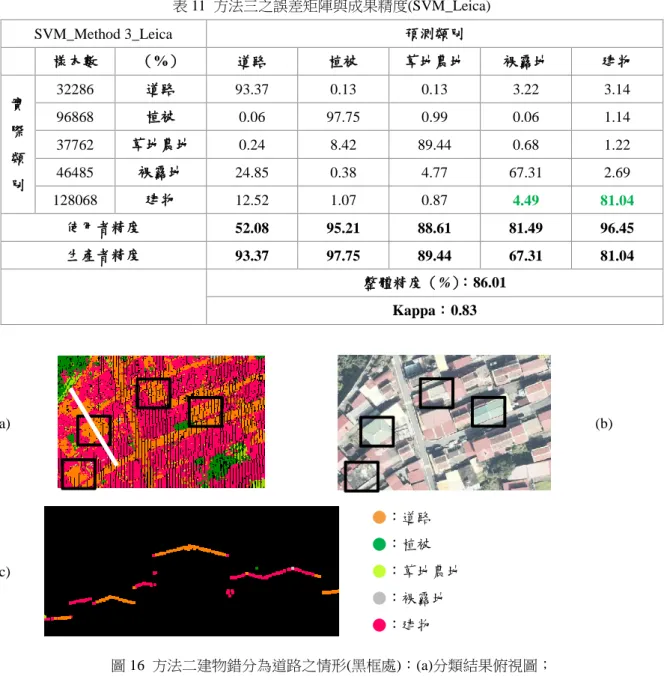
裸露地類似,進而造成錯誤分類之結果,由圖 16 中可看出建物類別被錯分之屋頂材質多為綠色鐵 皮及水泥材質。此外,可發現分錯建物樣本點中之 建物邊界是分對的,是因為建物邊界為多響應,在 方法二中與單響應是分開分類,也證明了此種分類 法其較響應為基礎的方法來得好。
表 6 各廠牌儀器資料之檢核樣本分佈
●:道路 ●:植被 ●:草地農地 ●:裸露地 ●:建物
Leica Riegl Optech
參 考 之 正 射 影 像
單 響 應 檢 核 樣 本
多 響 應 檢 核 樣 本
檢 核 樣 本 波 數
單響應(波數=響應數) 道路:32286
植被:67733 草地農地:37762 裸露地:46485 建物:120570 多響應(波數/響應數) 植被:29135/37099 建物:7498/15165
單響應(波數=響應數) 道路:16214
植被:42590 草地農地:15058 裸露地:18765 建物:78402
多響應(波數/響應數) 植被:14030/29016 建物:6207/12577
單響應(波數=響應數) 道路:7061
植被:10936 草地農地:7537 裸露地:9209 建物:37084
多響應(波數/響應數) 植被:5979/12905 建物:2219/4466
表 7 不同廠牌之儀器於三種方法之 SVM 分類成果
●:道路 ●:植被 ●:草地農地 ●:裸露地 ●:建物
Leica Riegl Optech
參 考 之 正 射 影 像
方 法 一
方 法 二
方 法 三
表 8 SVM 分類成果-整體精度比較(%)
方法一 方法二 方法三
Leica 58.63 80.69 86.01
Riegl 66.87 77.41 85.76
Optech 64.52 77.18 82.82
表 11 為方法三之成果精度,其中顯示了加入 影像後所有類別之分類成果精度皆略有提升,其中 精度提升最多之類別為建物,其生產者精度提升
11%,主要差異為減少了建物錯分為裸露地的情形,
如圖 17 所示(b),可明顯看出加入色彩資訊後其 建物分類之正確比例提升。
▓方法一 ▓方法二 ▓方法三
圖 15 各廠牌儀器資料於各方法之分類精度直方圖(單位:%) 表 9 方法一之誤差矩陣與成果精度(SVM_Leica)
SVM_Method 1_Leica 預測類別
樣本數 (%) 道路 植被 草地農地 裸露地 建物
實 際 類 別
32286 道路 96.04 0.75 0.11 2.59 0.51 133967 植被 14.69 79.83 2.87 1.59 1.01 37762 草地農地 0.21 57.48 37.47 2.79 2.06 46485 裸露地 43.98 3.04 7.25 40.45 5.28 135735 建物 25.58 3.96 6.38 23.17 40.91
使用者精度 29.27 78.82 47.06 34.65 92.11 生產者精度 96.04 79.83 37.47 40.45 40.91
整體精度(%):58.63 Kappa:0.54
表 10 方法二之誤差矩陣與成果精度(SVM_Leica)
SVM-Method 2-Leica 預測類別
樣本數 (%) 道路 植被 草地農地 裸露地 建物
實 際 類 別
32286 道路 94.96 0.14 0.07 2.25 2.58 96868 植被 0.07 97.88 0.94 0.05 1.06 37762 草地農地 0.10 8.12 87.77 1.13 2.87 46485 裸露地 29.82 0.42 7.20 58.96 3.59 128068 建物 16.25 0.91 2.14 10.82 69.89
使用者精度 46.85 95.50 82.51 64.55 95.10 生產者精度 94.96 97.88 87.77 58.96 69.89
整體精度(%):80.69 Kappa:0.77
表 11 方法三之誤差矩陣與成果精度(SVM_Leica)
SVM_Method 3_Leica 預測類別
樣本數 (%) 道路 植被 草地農地 裸露地 建物
實 際 類 別
32286 道路 93.37 0.13 0.13 3.22 3.14 96868 植被 0.06 97.75 0.99 0.06 1.14 37762 草地農地 0.24 8.42 89.44 0.68 1.22 46485 裸露地 24.85 0.38 4.77 67.31 2.69 128068 建物 12.52 1.07 0.87 4.49 81.04
使用者精度 52.08 95.21 88.61 81.49 96.45 生產者精度 93.37 97.75 89.44 67.31 81.04
整體精度(%):86.01 Kappa:0.83
(a) (b)
(c)
●:道路
●:植被
●:草地農地
●:裸露地
●:建物
圖 16 方法二建物錯分為道路之情形(黑框處):(a)分類結果俯視圖;
(b)對照影像;(c)分類結果側視圖圖(白線處剖面情形)
(a) (b) (c) (d)
●:道路 ●:植被 ●:草地農地 ●:裸露地 ●:建物 圖 17 方法三建物精度提升之情形(黑框處):(a)整區參考影像;
(b)局部參考影像;(c)方法二局部分類結果;(d)方法三局部分類結果;
7. 結論
全波形光達較傳統光達保留了更多資訊,研究 中透過對不同地物進行波形分析,並訂定了一套對 於全波形光達資料的分類流程,來驗證波形特徵是 否足以反映不同型態的地物。研究中,我們以五類 地物樣本即植被、建物、草地農地、裸露地及道路 為主進行特性統計,波形特性包含響應特徵、整波 形特徵及空間局部範圍內統計特性,經由各樣本繪 製之一維特徵機率密度圖與三維特徵空間散佈圖,
以及各類樣本間分離度計算來進行特徵分析,分析 結果顯示波形特徵能夠有效地區分不同地物類別。
實驗中使用了三家廠牌儀器(Leica、Optech、Riegl)、
三種分類方式(方法一:以響應為基礎;方法二:
以波形為基礎;方法三:以波形為基礎並加入影 像) ,最後,以 SVM 進行分類,透過誤差矩陣評 估成果。結論如下:
I. 單響應波形特徵統計分析中顯示響應振幅能 區分道路與草地農地兩類別,而響應波寬對 於區分植物與非植物最有幫助,
Cross-section 對於道路與植物類別之區分性 較高。對應方法一之成果顯示,植物與非植 物類別雖具可區分性,但因缺少整波形特性 與鄰近空間局部範圍內統計特性,草地農地 與高植被容易混淆,導致成果精度下降,且 具有多回波特性之建物邊緣也不易被偵測。
而裸露地、道路與建物等類別則因部分材質 相似的關係,造成誤判情形。
II. 在多響應特徵中,利用分離度挑選出九個較 具區分性之特徵,以觀察植被與建物邊界的 區別性。分析結果顯示該兩類別在這些特徵 中能被清楚區別。方法二即是以整條波形為 主並加入選取之多響應特徵進行分類,其分 類整體精度較方法一有大幅提升,也證明了 加入多響應特性後植被與草地農地類別能順 利區別,而建物邊界亦能正確分類,且裸露 地的分類精度也明顯上升。
III. 分類方法中,當使用 Leica 資料與 SVM 分類 器時其整體精度最高,可達 80.69%,kappa
值為 0.77。方法三之整體精度可達 86.01%,
kappa 值為 0.83。由方法三的誤差矩陣可看 出,加入影像對於改善建物類別分類成果最 為顯著,對裸露地之效果則較不顯著,因裸 露地大部分錯分為道路是因其兩者顏色相近 之緣故。
IV. 成果顯示研究中提出以波形為基礎的分類法 較以響應為基礎的分類法好上許多,其主要 原因為,在多響應波形中,每個響應之性質 可能受到較多因素之影響,若將每個響應皆 視為一單元比較,會忽略了訊號穿透時所受 到之影響,進而造成多響應中各個響應的特 性無法與單響應波形之特性進行比較。另一 方面,由於無法得知其穿透過程所接觸到之 地物,故亦無法確定多響應中第二回波以上 之波形類別。因此,在定義波形類別過程中 可能有定義錯誤的情形發生,造成原本正確 的分類被誤判為錯誤的分類。故檢核資料的 誤差可能使方法一精度下降。然各類別樣本 數相當大,故推測下降幅度並不足以影響整 體的分類成果。
致謝
本研究承蒙國科會部份經費補助(計畫編號 NSC 101-2221-E-006-181- MY3),特此致謝。
參考文獻
包順安,1999。高光譜影像平滑與特徵萃取對分類 精度之影響,國立成功大學測量工程研究所碩 士論文。
徐百輝、曾義星,2000。高光譜影像特徵萃取方法 之探討,航測與遙測學刊,第五卷第二期,1-14 頁。
Alexander, C., Tansey, K., Kaduk, J., Holland, D., Tate, N.J., 2010. Backscatter coefficient as an attribute for the classification of full-waveform airborne laser scanning data in urban areas.
ISPRS Journal of Photogrammetry and Remote Sensing, 65, pp. 423-432.
Choi, E. and Lee, C(2003), Feature extraction based on the Bhattacharyya distance. Pattern Recognition, 36,1703 – 1709.
Doneus, M., Briese,C., Fera,M. and Janner,M.,2008.Archaeological prospection of forested areas using full-waveform airborne laser scanning, Journal of Archaeological Science,Vol. 35, 882-893.
Heinzel, J., Koch, B., 2011. Exploring full-waveform LiDAR parameters for tree species classification.
International Journal of Applied Earth Observation and Geoinformation, 13, pp.
152-160.
Landgrebe, D. and Biehl, L.,1997. An Introduction to Multispec.
Liang, X., Hyyppa,J., Matikainen, L., 2007.
Deciduous-coniferous tree classification using difference between first and last pulse laser signatures. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Vol. 36, pp. 253-257.
Lin, Y.C., Mills, J., 2009. Integration of full-waveform information into the airborne laser scanning data filtering process.
International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences 36 (Part 3/W8), 224–229.
Mallet, C., Bretar, F., Roux, M., Soergel, U., Heipke, C., 2011. Relevance assessment of full-waveform lidar data for urban area classification. ISPRS Journal of Photogrammetry and Remote Sensing.
Matsatsinis, N.F., Samaras, A.P., 2000. Brand choice model selection based on consumers’
multicriteria preferences and experts’ knowledge.
Computers & Operations Research(27), pp.
689-707.
Means, J.E., Acker, S.A., Harding, D.J., Blair, J.B., Lefsky, M.A., Cohen, W.B., Harmon, M.E., McKee, W.A., 1999. Use of large-footprint scanning airborne lidar to estimate forest stand characteristics in the western cascades of Oregon. Remote Sensing of Environment, Volume 67, issue 3, pp. 298-308.
Neuenschwander, A.L., Magruder, L.A., Tyler, M., 2009. Landcover classification of small-footprint, full-waveform lidar data.
Journal of Applied Remote Sensing, Vol. 3, 033544.
Rottensteiner, F., 2003. Automatic generation of high-quality building models from LIDAR data.
Computer Graphics and Applications, 23 (6), pp.
42–50
Song, J.H., Han, S.H., Yu, K., Kim, Y.I., 2002.
Assessing the possibility of land-cover
classification using LiDAR intensity data International Archives of Photogrammetry, Remote Sensing, and Spatial Information Sciences, 34 (Part 3B), pp. 259–262.
Wagner, W., A. Ullrich, V. Ducic, T. Melzer, N.
Studnicka, 2006. Gaussian Decomposition and Calibration of a Novel Small-Footprint Full waveform Digitising Airborne Laser Scanner.
ISPRS Journal of Photogrammetry and Remote Sensing, No. 2, pp. 100-112.
Wagner, W., Hollaus, M., Briese, C.,Ducic,V., 2008.
3D vegetation mapping using small-footprint full-waveform airborne laser scanners.
International Joutnal of Remote Sensing 29 (5), pp.1433-1452
Wang, C.K., 2012, Exploring weak and overlapped returns of a LiDAR waveform with a wavelet-based echo detector. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XXXIX-B7.
1 Master, Department of Geomatics, National Cheng Kung University Received Date: Mar. 21, 2013
2 Ph.D, Department of Geomatics, National Cheng Kung University Revised Date: May. 07, 2013
3 Professor, Department of Geomatics, National Cheng Kung University Accepted Date: May. 21, 2013
4 Assistant Professor, Department of Geomatics, National Cheng Kung University
*.Corresponding Author, Phone: 886-6-2383876 ext. 852, E-mail:[email protected]
Waveform Feature Analysis and Classification of Airborne LiDAR Data
Yu-Chia Hung1 Cheng-Kai Wang2* Yi-Hsing Tseng3 Hone-Jay Chu4
ABSTRACT
Thanks to the development of LiDAR technology, recording full waveform information of return laser signal has become available. Compared with the conventional LiDAR system, waveform LiDAR further encodes the intensity of return signal along the time domain, which enables the users to utilize the continuous return signal for the interpretation of ground objects. Potential of more applications than the use of traditional LiDAR can be expected with the use of full waveform LiDAR. A LiDAR waveform is a recorded energy of the backscattered laser pulse along the time domain. The shape of a waveform is formed according as the characteristics surface reflectance, geometric structure and roughness of the laser footprint. It would be possible to extract the information of surface characteristics from waveform data, and this information can be used for the classification of ground surface. This study focuses on the analysis of LiDAR full-waveform data. The effects of various ground objects and surfaces on the waveform data will be analyzed, and the reparability of waveform features among categories of ground objects will be identified. Based on this analysis, a classification approach is developed for LiDAR full-waveform data. The estimation of classification accuracy will be reported as well.
The experiment data were collected with three airborne LiDAR systems of different brands, namely Leica、
Riegl and Optech. The land cover objects of the experimental area are mainly categorized into road, canopy, grass & crop, bare ground and buildings. Waveform features were analyzed with respect to the single and multiple return laser paths samples, and waveform classification features were selected according to the analysis.
Then, the supervised classification by using Support Vector Machine (SVM) was performed in three defined methods which include echo-based, waveform-based and waveform-based with images. The experiment results show that the overall accuracy of waveform-based method increases about 20% comparing to echo-based method and it can achieve 86% with the images. This study reveals the potential of 3D object classification using airborne LiDAR waveform data.