Volume17, No2, August 2013, pp. 95-114
1逢甲大學都市計畫與空間資訊學系 副教授 收到日期:民國 101 年 02 月 09 日
2嶺東科技大學資訊管理學系 教授 修改日期:民國 101 年 11 月 09 日
3逢甲大學都市計畫與空間資訊學系 碩士 接受日期:民國 101 年 11 月 25 日
4逢甲大學環境資訊科技碩士學位學程 碩士
5群立科技股份有限公司 專案經理
*通訊作者, 電話: 04-24517250 ext.3357, E-mail: [email protected]
建立航測影像稻作坵塊物件生成與時空變化模式之 研究
雷祖強
1*萬絢
2黃政翊
3李哲源
4歐陽志豪
5摘 要
水稻為台灣主要糧食作物之一,政府每年投入大量資源進行水稻坵塊面積調查,調查成果將進行農 業管理上之依據。但調查過程多以人工圈選方式進行向量圖檔之建立,此過程耗時甚鉅,因此如何快速 地從高解析度數值航照影像中獲取地理空間訊息,進而達到農業資訊化管理之目的,基本上就是一個重 要的研究課題。本研究欲發展一個結合坵塊尺度資訊與熵分類器(Entropy Base Classifier, EBC)的區塊物件 化熵分類器(Region Object-oriented Entropy Based Classifier, ROEBC),並與傳統逐像元概念之最大概似分 類器(Maximum Likelihood Classifier, MLC)來進行比較。研究成果顯示,使用 ROEBC 分類器可在各別波 段產生切割點後並計算出個別屬性的資訊增益(Information Gain, IG)值。並且可以使用 IF…THEN 法則成 功的將複雜的影像資訊的分類問題,轉化成一階邏輯概念的程序表達形式,這個形式會比傳統的統計參 數式分類法則(如 MLC 法),更有效的表達出影像之知識內涵。此外物件導向分類器就點檢核與面檢核的 觀點來看,均同時顯示優於逐像元式分類器之成果,這也顯示本研究所使用的物件導向分類器在製作水 稻主題圖上,要比傳統逐像元的方式更為理想與成功。最後,本研究以坵塊化概念呈現了本研究成果與 其他GIS 資料整合分析的可行性,以及同時提供了轉作休耕田與外業調查人力投入度策略之分析成果。
關鍵詞:農業資訊管理、水稻萃取、最大概似分類器、熵分類器
1. 前言
台灣地區地狹人稠,土地資源極為有限,由於 台灣內部社經結構變遷快速及各項產業發展對土 地利用需求甚高的情況下,導致農地面積日趨減少 且分布零碎。在因應環境永續發展之國際潮流的形 勢下,農業生產環境維護及農地資源合理管理之利 用已經是一件克不容緩的目標。基本上農政管理單 位對於農地基礎資料、農地利用現況以及農田作物 栽培等資料需詳實瞭解後,方能合理的規劃農業發 展地區與建立資源保育等制度,進而符合現行國土 利用與資源保育的政策與方向。然而欲達到上述課 題訴求就需持續建立數位化的農田坵塊資訊,因為
農田坵塊資料為農地管理的基礎,而地政管理單位 所提供之農田地籍圖通常在部分地區存在者與現 況使用出入過大等各種問題而不易解決,因此如何 利用及時性高的影像資訊,來達到農田坵塊資訊化 並提高農田坵塊的生產效率,基本上就是一個重要 的研究課題。為達到農田坵塊資訊化管理之目的,
在國內已有許多學者多應用衛星遙測資料來調查 水稻田坵塊之建置問題,如利用多時段影像法(鄧 敏松,1997、蕭國鑫等,2004)、紋理資訊增揚 (雷 祖強等,2007) 、空間知識挖掘 (Lei et al., 2008) 與 類神經網路分類法 (Wan et al., 2010) 等,進而改 進影像中水稻分類判釋成果。但目前在國內的水稻 坵 塊 圖 是 經 由 人 工 數 化 航 空 照 片 後 所 產 生 之
1/5000 比例尺大小的 GIS 圖檔,而衛星資料則多 是 從 中 解 析 度( 如 SPOT) 到 所 謂 高 解 析 度 ( 如 Quickbird)的衛星資料,這與目前所需 1/5000 比例 尺大小的規格仍有所差距,結果則會導致兩種差異 極大尺度的資料(衛照與航照)在整合與管理上產 生極高的困難度。因此使用具有RGB 波段與近紅 外光(Near infrared , NIR) 波段資訊的高解析度數 值航照影像,應當就是一個不錯的選擇。但欲直接 應用如此高解析度數值航照影像的同時,首要面臨 的就是豐富資訊處理困難(空間解析度 25 公分)、
大量雜訊不易移除(所謂的椒鹽效應)與地物間容 易發生誤判等相關問題,因此在影像處理程序當中 若以區塊為基礎(Region-based)的萃取方法,就是 另一個適當的新選擇。
從學理面上來說,以區塊物件為基礎的分類方 法 可 包 含 兩 個 步 驟 : 首 先 是 影 像 分 割(Image Segmentation)過程而其次是分割後坵塊(Parcel)的 影像分類(Image Classification)過程(Wang et al., 2004;Lu and Weng, 2007)。在影像分割方面,又 分成兩大關鍵步驟,首先是物件導向資訊(Object Oriented Information, OOI) 的 提 供 ( 以 下 簡 稱 OOI),其次是影像分割模式的使用。在物件導向 資訊建立的部分,多數學者綜合使用顏色(Color)、
圖案(Prints)、紋理(Texture)與形狀(Shape)來表達影 像的內容、屬性與知識規則(Haralick et al., 1973;
Thomas et al., 2003;Gitas et al., 2004; Walter, 2004;Magnussen et al., 2004)。此外上述資訊確立 後,則是使用何種影像分割模式來達到目的。基本 上影像分割模型可視為一種空間資料的尺度轉換 過程,這種模型可將原本影像當中的像元(Pixel)尺 度,轉換成坵塊(Parcel)的尺度,進而達到同質化 空間物體的效果。更進一步地來說,經過影像分割 的影像,吾人可以使用更為適當的空間尺度來觀察 地物結構(例如本研究所探討之農地耕作行為),進 而獲得理想的地物分類成果。而影像分割方式主要 可以區分為四大類:1. 門檻值 (Threshold) 法、2.
邊 緣 為 主 (Edge-Based) 、 3. 區 塊 為 主 (Region-Based) 和 4. 集水區法(Watersheds)(Sonka et al., 1998; Soille, 1999)。而影像分割最大優勢就
是分割後影像會形成一個個孤立的坵塊,可以清楚 表達出該坵塊內的屬性資訊,如此方能進行所謂的 農田坵塊的物件化管理。此時上述作法已經將影像 中目標地物轉換成有意義的空間尺度,不再是原來 一 個 個 像 元 的 結 構 形 式(Blaschke and Strobl, 2001),而下一個問題就是如何的分類。
基本上知識的表達方式有很多種形式,例如物 件 表 達 法 (Object Representation) 、關聯表達法 (Association Representation) 、 程 序 表 達 法 (Procedural Representation)、類神經表達法 (Neural Network)與統計性方法 (Statistic Method)等各種形 式(Zhu and Davidson, 2007)。其中在影像分類上經 常被拿來討論的方法有類神經表達法與統計性方 法,而統計性方法就是我們經常使用的機率表達方 式 , 也 就 是 所 謂 的 最 大 概 似 分 類 法(Maximum Likelihood Classifier, MLC)。由於統計性的方式多 是使用參數推估的概念,其必須假設抽樣樣本會符 合常態機機率密度的假說,但現實上仍有其困難 性。另一方面伴隨着資料挖掘技術逐漸成熟,若能 透過合理且有效率的資訊簡化模式,事實上不必然 需要使用統計性的方式來達到分類目的,因此本研 究嘗試發展一個以資料挖掘概念為基礎的區塊物 件 化 熵 分 類 器 (Region Object-oriented Entropy Based Classifier, ROEBC)模式來達到影像分類之 目的。所謂ROEBC 模式是結合 Shannon 所提出的 資訊熵(Information Entropy)與影像物件化概念後 所發展出來的一種新的物件化分類器。基本上 Shannon 在 1948 將 Entropy 觀念用於解決資訊理 論(Information Theory)的問題,成為以數學工具來 度量生活中不確定性問題的方法之一,其連結了熱 力學與資訊理論中的Entropy 概念來闡述資訊離散 程度,可找出合宜的分割點位,進而達到分群或分 類的目的。目前已有許多學者利用 Entropy 的概 念,運用於各類型的支援決策之研究課題上面,如 文字辨識、人臉辨識與土石流分群等決策支援屬性 之建立 (Liu et al., 2005,Maruyama et al., 2005;
Magimai-Doss et al., 2007;Salvi, 2006;黃沛羣,
2008;Wan, 2009;萬絢及閻嘉義,2009;Xia et al., 2011),但尚未有學者直接應用在遙測影像分類的
相關課題。由於遙測影像資料多半乃是以0-255 灰 階的方式儲存資料,使用此方法可將影像資料經由 Entropy 功能將資料離散化後,除了可簡化資料尺 度之外,亦可萃取出資料屬性與決策間的關聯性,
也就是說,可用程序表達法概念(IF THEN)來呈現 影像資訊,相對於統計概念的參數型分類器,程序 表達法之概念是一個真正能夠挖掘出空間影像資 訊意義的理想方法。
綜觀前述幾項議題再加上數值影像新時代的 來臨,本研究嘗試討論出更多的影像空間分類方 式,來改進上述新型態影像在分類上所帶來之問 題,因此本研究之目的有三:1. 發展出結合坵塊 尺度與資料挖掘技術的新分類器,首先將影像透過 區塊化方式分割成塊狀結構。其次再使用ROEBC 分類模式進行影像分類,進而形成水稻田物件的基 本型態。最後其資訊內容可大幅簡化遙測影像複雜 且不易處理訊息之問題 2. 比較與討論區塊化分類 後影像(ROEBC)與逐像元分類(MLC)成果兩者間 之差異性。3. 探討物件化後的坵塊在農業管理上 的應用策略。
2. 研究地區、材料與流程
本章將討論研究地區、材料與流程等,內容介 紹如下:
2.1 研究地區與影像資料
本研究所使用影像資訊為ADS-40 數值航照,
影像拍攝時間為2008 年 5 月 18 日。實驗地區位於 雲林縣東勢鄉,空間樣區大小為2402*2702,此地 區之地表物包含了水稻、大蒜、花生、草地與道路、
裸露地、水池等六大主要類別及少數的建物與樹 林,圖1 為實驗地區之區位與影像。
2.2 水稻田之現地向量資料
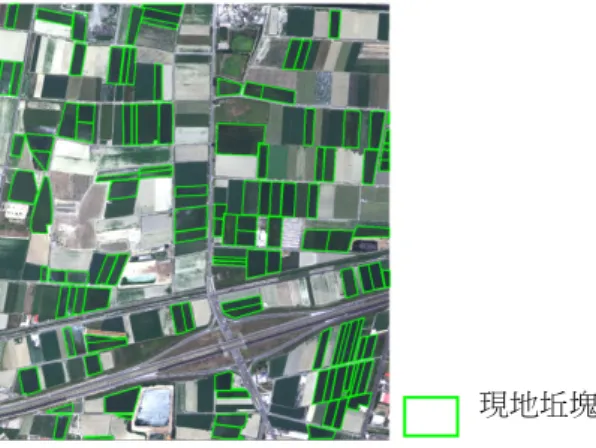
向量資訊包含了當年當期的水稻田種植情況 調查成果 (簡稱現地坵塊圖),本研究所使用之 2008 年水稻二期作耕地坵塊圖做為地眞檢核資 料,該資料為行政院農業委員會農糧署所提供的向 量檔,製作方式乃是透過當期航照影像拍攝後,利 用地籍圖層為基礎,並以人工判釋方式判別某一農 田坵塊是否為當期水稻田。在此同時本研究也至實 驗地區進行稻田種植情形之現地調查成果後,結合 兩項資訊進行數化編修後所產生的向量資訊成果 檔。現地坵塊之調查時間為2008 年 7 月 5 日。調 查後之成果將會透過 GIS 軟體進行數化的動作,
本研究使用ArcMAP 9.2 進行數化的工作,圖 2 是 根據現調結果進行數化之成果,現調成果中之水稻 田坵塊數為84 塊,水稻耕作面積約為 24.5 公頃,
佔樣區總面積約21.8%。
圖1 研究區位與影像資料
圖 2 現地調查成果數化結果
2.3 研究流程
本研究研究流程如圖3 中所示,而其內容分述 如下,首先是ADS-40 影像之收集,其次是影像增 益資訊(Ancillary Information)的計算,此部分是使 用 灰 階 共 發 生 矩 陣 (Grey Level Co-occurrence Matrix, GLCM) 之同質紋理 (Homogeneity Texture) 資訊的概念來計算各光譜值的紋理資訊(Haralick et al., 1973) , 也 就 是 圖 3 當 中 的 B-HOM. 、
G-HOM.、R-HOM.以及 IR-HOM.等資訊。此外也 同 時 計 算 常 態 化 差 異 植 生 指 標 (Normalized Difference Vegetation Index, NDVI)來做為另一項 影像增益資訊,而上述的資訊會提供給逐像元分類 器與物件導向式分類器共同使用。在逐像元式分類 法方面,是以最大概似法進行影像中像元的分類。
同時在 ROEBC 分類模組方面(流程圖中紅色虛線 部分),本研究又可分成兩大區塊,那就是淺綠色 虛線的分割模組與深藍色虛線的分類模組。其中分 割模組部分,透過合適 OOI 的提供,本研究發展 出一個空間映射轉換模組,將多維空間轉換成單一 尺度,以方便影像分割,分割後的影像就完成物件 外部資訊的產生。其後帶入到分類模組當中,因為 影像已經區塊化了,在此本研究使用ROEBC 方式 進行區塊化後的影像分類課題探討,更進一步的分 別比較兩種不同分類方法所產出水稻田坵塊主題 圖的差異性。
圖3 本研究流程 現地坵塊
3. 研究方法
3.1 計算影像 OOI 資訊
基本上空間物件資訊的提供,就決定物件分割 的品質,也就是說影像分割的好壞,是端賴於使用 者提供何者資訊給機器進行分類學習。在本研究的 課題當中,研究的標地物是水稻坵塊田,不同於其 他的植生作物,水稻在影像當中會呈現某一程度的 均質性,因此本研究使用灰階共發生矩陣與常態化 差異植生指標來表示水稻之OOI 資訊。
3.1.1 灰階共發生矩陣
灰階共發生矩陣是一種二階統計方式,其主要 統計每一對可能的灰階值出現在特定相關位置上 的頻率,其中需設定距離 (Distant) 與角度 (angle) 兩參數。
( , ) ( , )
( ( , ))
ij i j
C d P d
S u m P d
(1) 式 (1) 中之Pij(d,θ)為灰階值i 的像元位於灰 階值為j 的像元之相對位置距離 (d) 與角度 (θ) 上的次數。若影像灰階值之範圍為0~N ,則Pij(d, θ) 矩陣之維度為(N+1)×(N+1)。在本研究中使用之距 離為1,以0、45、90、135、180 等角度進行紋理 之計算。而Cij(d, θ)表示影像中灰階值i與j出現在相 對位置上的聯合機率(Joint Probability),其中的 距離與角度值與Pij中所設定的值是相同的。
灰階共發生矩陣提供了影像中灰階值空間分 佈情形的資訊,但我們尚需將其進一步量化為單一 數值的形式,方能提供電腦直接分析使用。由於同 質紋理資訊在同質性高的區塊表達上有較高的能 力(例如水稻坵塊),因此本研究採用灰階共發生矩 陣之同質紋理資訊以加強水稻田坵塊資訊,其計算 方法如式 (2) 所示。
2
0 0
1 1 ( )
N N
ij
i j
Homo C
i j
(2)3.1.2 常態化差異植生指標
常態化差異植生指標NDVI 是由 Rouse 等人在
1973 年 所 提 出 之 影 像 植 生 計 算 概 念 (Rouse, 1973)。NDVI 主要是利用可見光中之紅光輻射值(R) 與近紅外光輻射值(NIR)進行計算,NDVI 之數值 分佈於-1~1 之間,在擁有植被反應處具有較高之 近紅外光波段反射值與較低之紅光波段反射值,故 其NDVI 值會大於 0,而 NDVI 值越高表地表植被 越茂密、生長狀況越好,公式 (3) 為其計算方式。
NIR R NDVI NIR R
(3)
3.1.3 空間映射轉換模組
當進行影像資訊計算後將會產生多維度的影 像資訊,本研究使用色彩特徵空轉換模式是為了將 多維的影像資訊合併成一維影像資訊。降低影像資 訊維度之目的在於減少後續區域成長法計算時所 需處理的影像資訊量,以加快分割速度。在進行影 像維度壓縮步驟前,需進行紋理資訊的選取再進行 影像維度壓縮,這是由於波段之間的資訊在進行影 像維度壓縮時會有互相干擾之情形發生,使影像維 度壓縮結果中萃取目標物與其他地物的混淆,將會 影響影像切割的結果,為了將影響降至最低,故需 要進行紋理資訊的選取,經由波段選取後所得的紋 理資訊將會進行影像維度壓縮的動作,影像維度壓 縮之計算方式如式 (4)。式 (4) 能夠將多維特徵向 量轉換為一個特徵向量,此方法能夠保留各分量原 始的強度,並強化具有較顯著特徵部分(李建德及 黃鐘賢,1999)。
1
( , ) ( , ) n b( , ) (1 b )
b
AmountPC i j F i j PC i j
N
PCb(i,j):為波段 b 影像中像元平面坐標 (i, j) 的值。
AmountPCb(i,j):為波段 b 平面上,具有與像元坐 標 (i, j) 相同灰度值之像元總數量。
N:為波段 b 影像之總像元個數。
3.1.4 影像分割
本 研 究 使 用 種 子 區 域 成 長 法(Seed Region Growth) 作 為 影 像 分 割 之 方 法 (Adams et al., 1994),種子區域成長法是在影像分割中最常使用 的方法之一,由於區域成長法之像元合併概念只須 (4)
設 定 相 似(Similarity) 及 面 積 (Area) 兩 個 門 檻 值 (Espindola et al., 2006),因此本研究選定其為影像 區塊化工具。區域成長法屬於二階段合併法,合併 的依據是根據上述兩個門檻值進行像元和區塊的 合併。第一階段是根據相似門檻值進行像元與像元 間的合併動作,當合併完之後,再透過第二階段的 合併將各個區塊進行合併的動作,其合併之依據是 以區域門檻值進行區塊間之灰階值距離的判斷進 行合併動作,灰階值距離計算公式為歐幾里德距離 公式,如式 (5) 所示。
( , ) ( )
G ray i j i j (5) 區域成長法一般需要進行種子點(seed)的設 定,本研究指定影像左上方之像元作為起始種子點 位進行起始分割,分割完畢後再指定下一個未被分 割的像元為起始點位,指定方式為由左而右,由上 而下的逐一掃瞄,重覆以上之動作直到所有點位都 歸類於某區塊為止。
3.2 影像分類器
影像分類才能將影像當中之水稻坵塊萃取出 來,本研究探討兩種分類器的差異性以及可能引發 之問題,其內容分述如下:
3.2.1 逐像元分類器
最大概似分類法是一種監督性分類法,假設各 分類之特徵值為常態分佈,再由訓練樣本計算每一 類別之平均向量及共變異矩陣。換言之,是先從已 知各類別之資料中建立出屬於各類別的高斯分佈 模型,再將未知的資料套入各類別的模型中,選出 在各類別的模型裡算出最大的事後機率,就是該未 知資料的類別。以高斯機率分佈建立出來的模型 中,主要的參數是平均值跟變異數,這種方法的好 處在於,不需儲存太多已知類別的資料,就能保留 類別的分佈特性,但如果資料分佈特性與高斯分佈 相差太多,亦或是類別間重疊性太高,這樣可能就 無法適用,必須先經過處理資料或是修正演算法 則。另一方面最大概似分類法精度高且最為被普遍
應用,但缺點是計算量大。
3.2.2 物件導向型分類器
前一階段影像透過區域成長法已產生區塊化 後之空間結構,此結構乃是根據影像中表達水稻最 佳資訊的條件下而切割出來的形式,也就是已經形 成表達水稻坵塊的理想尺度結構,但上述的結構僅 有形式而尚未分類,因此下一個階段的工作則是需 要進行結構上的分類。在此本研究則是使用資料挖 掘概念的ROEBC 方法,來進行坵塊尺度的資料分 類。所謂的ROEBC 分類器,基本的想法則是建立 在坵塊形狀結構與Entropy 這個物理量的表達形式 之上,所謂Entropy 是用以描述一個系統凌亂程度 之度量模型。這個方法首先需對於原始資料進行離 散化之動作,即尺度上的壓縮,再藉由壓縮後資料 分析原始資料與目標決策之間的關係,進而建立出 分類成果。
為進一步瞭解ROEBC 分類器的價值,本研究 將以下表1 來說明 ROEBC 分類器之功用。若我們 透過空間結構化後的影像資料取出兩種形式的樣 本共有10 筆(x1到x10),其屬性資料如表 1 所示,
其中決策1 的有 6 筆,決策 2 的有 4 筆。而 ROEBC 其分析流程依序表2 當中所示:
表1 樣本資料
資料 屬性 決策
x
1 115 1x2 151 1
x3 172 1
x
4 173 1x
5 187 1x
6 255 1x
7 33 2x
8 36 2x
9 145 2x
10 178 21. 首先將資料依屬性值由小至大(或由大至小)
排列如步驟(a)。
2. 依序假設任兩筆相鄰屬性值的中點為候選的 切割點FCP
t (Fictitious Cutting Point)值(如 步驟(b)),其中 t 為各切割點的代號。然後依序 計算出個別資料間的FCP
t 值,依據不同的
tFCP 可各別將屬性資料進行二類分類,也就 是小於門檻值的為一群,而大於門檻值的為另 一群。為求後續便於了解,本研究以FCP
t3
(即值 130.0 的位置)做為因子計算的說明範 例,接著令屬性值小於FCP
t (在此為 130.0) 之資料屬性類別為1(即 j1),反之屬性值大 於FCP
t 之資料屬性類別為2(即j2) 。3. 在實際的狀況中,相同屬性類別的資料往往包 含不同決策之結果,即無法準確判別該屬性類 別與決策之間的關係。因此,不同的屬性類別 各有不同的Entropy 值以量化各屬性類別與決 策之間的凌亂程度。依據下列 (6)的公式,計 算基於所假設切割點FCP
t 下,不同屬性類 別之entropy
t j如步驟 (d):
2
1
2 |
log
|
i
j j
j pi t pi t
t
entropy (6)
其中
i :決策類別(於本範例中為 1 或 2)
j:屬性類別(基於所假設切割點 而分類之 結果)
P(i|t)j:在屬性類別為 的資料中,決策類別為 所佔的比例如步驟(c)。(詳例請參閱 附錄)
經由上述的步驟,可動態求得在不同的
tFCP 下,j1及 j2各自的Entropy 值,
此值在此將介於0 到 1.0 之間,如在FCP
t3
位置上, j1及 j2各自的 Entropy 值為 0.92 與 0.86。當 Entropy 值為 0 時,表示屬性 資料類別與決策類別完全一致,意即屬性與決 策之間的關連並無凌亂;反之,當Entropy 值 為1.0 時,表示屬性資料類別與決策之間的關 係最為凌亂。
4. 資訊增益(IG)是對於 Entropy 的使用一個概 念,IG 的計算依據下列公式:
j 1.0
jig t entropy t (7) 參考entropy
t j的公式可求得ig(t)j如步 驟(e),在FCP
t3
位置上, j1及 j2各 自的ig(t)j值為0.08 與 0.14,ig(t)j介於0 到 1.0 之 間 。 但 是 對 比 於 Entropy , 且 依 舊 參 照 Entropy 的屬性類別趨勢。5. 藉由給定的 FCP(t)可以推導出各屬性類別的 比例。將各屬性類別的比例乘以 ig(t)j的計算 可得到IG(t)如步驟(g),公式如下:
其中
2
1
| j
j
IG t p j t ig t
(8) P(j|t)為在切割點下資料屬性 j在整體的所佔 比例如步驟(f)。例如在FCP
t3
時,j1的 P(j|t)值為 310
,而 j2的P(j|t)值為7
10。 6. 公式中之特例,為當p
i|t j 0時,在Entropy計算時會出現0 log 0 2 之無法計算之狀況,因 此在最後決策時不列入考慮。
7. 檢視IG t 相對應於切割點
FCP
t 的所有可 參考值,在FCP
t3
時IG t 為 0.12,其對
應之FCP
t 值為 130.0,較大的IG t 表示
tFCP 也 較 佳 。 計 算 每 一 列 的 IG t , 將
IG t 中的最大值視為屬性與決策之間最佳 切割點,如下表中最後的0.29 所對應之FCP
t 值為148.0,為本範例中之最佳切割點。從結果中對應到原資料屬性與決策,在
4
FCP t (即值 148.0)時,其目標決策上誤漏 判筆數皆只有一筆,相對於其他結果,是本次 示範資料中最佳之狀況。
4. 實驗與討論
本研究根據前述目標與分析項目可獲得下面 之五大成果:1. 影像 OOI 資訊與空間映射轉換成 果。2. 影像分割結果。3. 影像分類結果。4. 分類 成果比較以及 5. 稻作坵塊物件化管理範例等,內 容如下所述:
表2 ROEBC 分類器決策程序 資
料 屬 性
決
策 t FCP
t p |
i t j entropy
t jig t ( )
jp j t | IG t
1
j j2
x
7 33 2 i1 i2 i1 i2 j1 j2 j1 j2 j1 j21 34.5 0.00 1.00 0.67 0.33 -- 0.92 -- 0.08 0.1 0.9 --
x
8 36 22 75.5 0.00 1.00 0.75 0.25 -- 0.81 -- 0.19 0.2 0.8 -- x1 115 1
3 130.0 0.33 0.67 0.71 0.29 0.92 0.86 0.08 0.14 0.3 0.7 0.12
x
9 145 24 148.0 0.25 0.75 0.83 0.17 0.81 0.65 0.19 0.35 0.4 0.6 0.29 x2 151 1
5 161.5 0.40 0.60 0.80 0.20 0.97 0.72 0.03 0.28 0.5 0.5 0.15 x3 172 1
6 172.5 0.50 0.50 0.75 0.25 1.00 0.81 0.00 0.19 0.6 0.4 0.08
x
4 173 17 175.5 0.57 0.43 0.67 0.33 0.99 0.92 0.01 0.08 0.7 0.3 0.03
x
10 178 28 182.5 0.50 0.50 1.00 0.00 1.00 -- 0.00 -- 0.8 0.2 --
x
5 187 19 213.5 0.56 0.44 1.00 0.00 0.99 -- 0.01 -- 0.9 0.1 --
x
6 255 1步驟(a) 步驟(b) 步驟(c) 步驟(d) 步驟(e) 步驟(f) 步驟(g)
4.1 影像 OOI 資訊與空間映射 轉換成果
首先本研究中使用 R、G、B、NIR 四個原始 波段進行同質紋理資訊的計算,各波段之同質紋理 如圖4 的(a)至(d)所示,其次再計算 NDVI 指標(如 圖 4(e))。最後再將各項紋理及 NDVI 的植生指標 透過空間映射轉換模組將多波段資訊空間進行影 像資訊壓縮,以利下一節的影像分割,其結果如圖 4(f)所示。
4.2 影像分割結果
在進行影像切割時,需設定區域成長法中的相
似與面積兩參數的像元數門檻值,該參數設定主要 是根據「以能夠切割出萃取目標形狀特徵」之想法 進行測試後所得的數據,在本研究區域成長法的參 數設定為25(相似參數)、25(面積參數)。
影像切割主要在於取得物件外部結構的特徵 (圖 5(a)),無歷史 GIS 坵塊輔助之區塊則是由區域 成長法直接由影像維度壓縮之成果中切割出來,故 在外觀上會相當地崎嶇不平(圖 5(b)),經過上述的 處理過程後,本研究獲得稻作坵塊146815 個,最 小面積的坵塊為 1 Pixel,最大面積坵塊為 37225 Pixel,後續要將上述資訊提供給物件導向型分類器 使用。
(a) R 波段同質紋理資訊 (b) G 波段同質紋理資訊
(c) B 波段同質紋理資訊 (d) IR 波段同質紋理資訊
(e) NDVI 植生指標 (f) 影像維度壓縮
圖4 同質紋理資訊、植生指標與影像維度壓縮成果
(a) (b) 影像分割之區塊
圖5 區塊化農田物件(a)整體圖與(b)局部放大圖
4.3 影像分類結果
4.3.1 逐像元分類器結果
本研究使用 ERDAS IMAGINE 9.2 軟體中所 提供之最大概似法進行逐像元類別的分類,藉以取 得所有像元的類別再進行後續類別的判釋。圖 6 為最大概似法之分類成果,此成果將會後續區塊類 別判釋的結果進行比較。
4.3.2 物件導向型分類器結果
經由4.2 節影像切割程序可得到影像坵塊結構 的資訊後,本研究從坵塊內部提出影像所有資料數 據,在此分成水稻樣區與非水稻樣區各為63 個與 44 個,整理後得到該坵塊之屬性類別資料和決策
類別資料,在此決策類別1 是水稻而 2 是非水稻(如 表3)。後續再利用 ROEBC 分類器分別計算出各個 波段最佳切割點值 (如表 4),並以切割點值進行各 類別之分類計算(如表 5)。
現地水稻坵塊 圖6 最大概似法分類結果 表3 影像區塊資料轉換成數據 (部分)
Grid
code R G B IR NDVI R-Homo G-Homo B-Homo IR-Homo Decision
… … … … … … … … … … 1
68923 10.46 12.95 14.97 41.92 180.28 165.63 177.17 200.23 143.12 1 69309 6.99 10.25 12.55 54.65 232.19 221.41 206.80 232.67 133.66 1 80256 8.37 11.52 12.72 43.68 203.07 197.94 193.43 203.19 115.66 1 81474 7.01 10.27 12.39 49.70 226.42 242.47 219.27 223.53 144.59 1 91285 7.00 10.25 12.69 58.03 235.97 236.08 218.44 233.03 148.25 1 96475 11.00 12.20 15.40 35.80 159.00 86.20 83.80 139.20 27.20 1 97790 7.24 10.59 12.65 52.41 227.40 219.81 200.00 205.64 73.13 1
… … … … … … … … … … 1
… … … … … … … … … … 2
70345 8.01 11.92 13.98 62.97 232.90 242.53 226.29 242.82 115.57 2 74499 10.45 13.81 15.20 46.76 188.66 123.77 195.39 197.41 23.32 2 75262 9.89 13.74 15.03 49.86 200.04 149.91 203.01 237.80 29.140 2 90777 8.92 13.21 14.91 67.41 230.35 213.49 213.16 230.55 96.47 2 90798 8.41 12.39 13.73 57.70 223.67 171.02 205.29 222.28 48.47 2 92006 9.41 11.72 14.38 39.00 183.00 134.84 129.82 193.62 53.08 2 106081 10.52 14.35 14.96 50.20 195.01 122.08 173.94 189.84 28.07 2 115657 8.44 12.23 13.88 55.16 220.01 148.79 182.64 209.77 31.67 2
… … … … … … … … … … 2
表4 各別影像最佳切割點值
R G B IR NDVI R-Homo G-Homo B-Homo IR-Homo FCP(t) 7.99 11.63 13.64 57.12 227.99 154.90 197.63 195.78 85.89
表5 熵分類器切割坵塊後結果 (部分) Grid
code R G B IR NDVI R-Homo G-Homo B-Homo IR-Homo Decision
… ... … … … … … … … … 1 68923 1 1 1 0 0 1 0 1 1 1 69309 0 0 0 0 1 1 1 1 1 1 80256 1 0 0 0 0 1 0 1 1 1 81474 0 0 0 0 0 1 1 1 1 1 91285 0 0 0 1 1 1 1 1 1 1 96475 1 1 1 0 0 0 0 0 0 1 97790 0 0 0 0 0 1 1 1 0 1
… … … … … … … … … … 1
… … … … … … … … … … 2
70345 1 1 1 1 1 1 1 1 1 2 74499 1 1 1 0 0 0 0 1 0 2 75262 1 1 1 0 0 0 1 1 0 2 90777 1 1 1 1 1 1 1 1 1 2 90798 1 1 1 1 0 1 1 1 0 2 92006 1 1 1 0 0 0 0 0 0 2 106081 1 1 1 0 0 0 0 0 0 2 115657 1 1 1 0 0 0 0 1 0 2
… … … … … … … … … … 2
在各別波段產生切割點後可根據公式(8)計算 出每個屬性的IG 值 (如圖 7),從圖上可看到其 IG 值最高值為IR-Homo,其次為 B,再其次為 G,….。
基本上IG 值代表資訊的分類能力(Maruyama et al., 2005;Wan, 2009;萬絢及閻嘉義,2009),在此 IG 值愈大代表影像分類的能力愈高,如同一般合理的 看法,在本研究中的 IR-Homo 值則代表者較高的 水稻類別資訊分類能力。但從另外一方面來說,IG 值除了可以鑑別個別資訊量的差異之外,累積的
IG 數值也代表對某些事物的知識表達能力,因此 本研究除了在各別產生其切割點後計算出每個屬 性的 IG 值之外,並利用 IG 值計算出各波段間重 要性百分比與累積百分比(如表 6)。
由於在影像分類中,並非只要考慮單一個波段 資訊影像便可將影像直接進行分類,但太多的資訊 又會產生誤判問題。因此本研究以圖7 所獲得之排 序成果以逐一加入資訊的方式來呈現分類結果,其 目標則是在使用最小資訊量就能表達最大分類能
力的考量之下,本研究發現只要選擇使用累積 IG 百分比大於 60% 為門檻值(如表 6 底下實線部分) 的資訊量,就可獲得極為理想的分類結果,也就是 說僅使用IR-Homo、B、G 與 IR 等 4 個波段(這也 就是所謂的特徵萃取),就能清楚表達出本研究所 需的分類目的。下一步則利用上述4 個波段並藉由 波段組合的方式,產生之知識規則生成影像結果 圖,建立的知識規則(如公式(9))與結果圖(如圖 8) 如下。
圖 8 為物件導向型分類器之水稻田坵塊萃取 結 果 , 就 結 果 而 言 , 逐 像 元 分 類 器 是 利 用 Pixel-based 的概念進行分類,而物件導向型分類器 則是利用Regional-based 的概念進行影像分類,因 此在結果上無點狀雜訊之情形(椒鹽效應),且從影 像結果上可看出,物件導向型分類器採用區塊結合 生成的關係,也就是說,將外部的結構與內部數值 結合後取出平均值。由於區塊化的關係,除了可降 低了像元式分類中的椒鹽效應的可能性,亦較容易
分析出區域之間的判斷,減少面積上的損失(如圖 6 與 8)。由此可知區塊式的分類方法比傳統像元式 分類方法更容易取得完整之坵塊結構資訊,這樣的 觀 點 也 與 許 多 學 者 的 研 究 成 果 相 似( 莊 政 斌 , 2004;雷祖強等,2007;鄭雅文等,2008;雷祖強 等,2009;Kamagata et al., 2006; Murakami et al., 2010)。最後綜觀公式 9 與圖 8 當中我們可以發現,
透過資料挖掘法的概念(在本研究是使用 ROEBC 法)可以成功的將複雜的影像資訊問題,轉化成一 階 邏 輯 概 念 的 程 序 表 達 形 式 , 也 就 是 所 謂 的 IF…THEN 法則,這個形式會比傳統的統計參數式 分類法則(如 MLC 法)更能有效的表達出影像的知 識內涵,也可避免統計參數式分類器不可避免的統 計分佈假說。因此相對於傳統統計參數式的知識表 達概念,本研究提出了新的觀點與方向,也成功的 解決像元式分類概念在高解析度影像上所造成之 椒鹽效應。下一節本研究將從數值上的誤漏判率來 討論兩種概念分類器所造成之差異。
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
IR- Homo
B G IR R R-
Homo G- Homo
B- Homo
NDVI
圖7 各波段 IG 門檻值 表6 影像中的資訊貢獻度
波段 IR-Homo B G IR R R-Homo G-Homo B-Homo NDVI
IG 值 0.4576 0.3476 0.3343 0.2664 0.2391 0.2120 0.1531 0.0809 0.0539
累積IG 百分比 21.33% 37.54% 53.13% 65.55% 76.69% 86.58% 93.72% 97.49% 100.00%
IF IR57.12 and IR-Homo85.89 Or
IF G<11.63 and B<13.64 and IR-Homo85.89 (9) Then Decision= 1 (水稻)
IF IR-Homo< 85.89
Then Decision= 2 (非水稻)
現地水稻坵塊 圖8 知識規則所建立之結果
4.4 分類成果比較
在分類成果精準度比較方面,本研究又可分成 兩大部分,首先是利用ERDAS 工具進行點檢核的 比較,其次再利用水稻田 GIS 地真資料進行面檢 核的比較。
4.4.1 點檢核精度成果
在點檢核的部分,本研究以隨機方式檢核350 個點位其成果如下表7 所示。點檢核的成果顯示,
就表7 而言,物件導向式分類器之點檢核精度結果 (整體精度:92.29%、Kappa 統計:0.8426)的確高 於逐像元分類器之精度結果(整體精度:88.57%、
Kappa 統計:0.7655),這也表示物件導向式分類器 之分類結果優於逐像元分類器之分類結果。雖然兩 者在整體精度上僅有約有4 個百分比上的差異,兩 者間的差異並不大,不過這是統計抽樣的分析結 果,因此本研究後續進行所謂的面檢核程序。
4.4.2 面檢核精度成果
面檢核的方式就是將圖6 與圖 8 與地真之 GIS 資料相互套疊(圖 3),再彼此檢視在水稻田資訊能 力上的呈現度(如表 8)。由表中的數據顯示,逐像 元 式 分 類 器 在 目 標 分 類 上 的 整 體 正 確 率 為 94.48% , 誤 判 率 與 漏 判 率 分 別 為 13.47% 與 11.90% ; 而 物 件 導 向 分 類 器 的 整 體 正 確 率 為 97.09%,誤判率與漏判率分別為 5.15%與 8.54%。
表示物件導向分類器不管是在整體影像主題圖繪 製目標上或在水稻物件錯判與遺漏的控制上,皆會 優於逐像元式分類器成果。不過另一方面,圖 8 當中仍然存在一些誤漏判問題(如圖 8 當中的 A 區 與B 區),本研究仔細檢視上述發生的原因,發現 上述問題的誤判多是因為區塊在生成過程中樣本 之光譜、紋理等屬性過於相近,造成目標物與非目 標物聚合在一起而造成結果上的誤判。而漏判原因 則是目前的知識供給程度只用了四個波段,對於上 A
B
述漏判區塊的知識表達能力不夠,因此會造成漏判 結果。回到一個最根本的原因還是一個明確且理想 的知識供給,方能產生理想的分類成果,而航照的 限制則是針對水稻這個議題,其知識供給並非是完 整而且理想,基本上來說航照的空間解析力相對理 想但其時間與波長解析力就不一定理想,這部分還
有待後續的研究持續努力來解決問題。不過整體而 言,本研究所使用之物件導向式分類器其整體精度 較高,而其個別的誤漏判機率比較低而且也比較相 近(見表 8 與表 9),這也顯示本研究所使用的物件 導向分類器在製作水稻主題圖上要比傳統逐像元 的方式更為的理想與成功。
表7 逐像元式與物件導向分類器在面積檢核結果矩陣 (a)逐像元分類
單位:Pixel 水稻 非水稻 總和 使用者精度
水稻 127 16 143 88.81%
非水稻 24 183 207 88.41%
總和 151 199 350
生產者精度 84.11% 91.96% 88.57%
Kappa 統計 = 0.7655 (b)物件導向分類
單位:Pixel 水稻 非水稻 總和 使用者精度
水稻 137 13 150 91.33%
非水稻 14 186 200 93.00%
總和 151 199 350
生產者精度 90.73% 93.47% 92.29%
Kappa 統計 = 0.8426
4.5 稻作坵塊物件化管理範例
本研究針對稻作坵塊物件化管理範例,提出以 下二點應用方式:
4.5.1 稻作坵塊 NDVI 數值之紀錄
由於本研究已將稻作坵塊區塊化了,因此就能 紀錄該坵塊的 NDVI 值 (如圖 9),其中圖 9 的(a) 與(b)的部分乃是個別坵塊屬性欄位的增減,而圖 9(c)則是將農田坵塊內的 NDVI 值個別取出,並記 錄至稻作坵塊資料庫當中,因為NDVI 值所代表的 意義為目前水稻生長狀況的之一種資訊坵塊,未來 若能配合現地濕穀樣本的採樣,我們就可建立光譜 影像與水稻產量的關係公式,這個公式可進行水稻 產量預估之用,而表 9 則是實證區內稻作坵塊的
NDVI 數值特性表。
4.5.2 稻作坵塊時空變化度之分析
由於農田坵塊每年的變動性質不一且極不穩 定,為推求稻作坵塊時空變動資訊以利未來估算稻 作產量,本研究將透過歷史稻作坵塊資訊與現況稻 作坵塊套合之結果,進行稻作坵塊時空變化度之分 析,進而了解現況稻作坵塊在歷史時間軸上之變化 程度。本研究收集實證地區94 年、95 年之歷史稻 作坵塊與97 年現調稻作坵塊萃取結果,透過稻作 坵塊組合邏輯分析後(如表 10),將其成果相互套疊 討論,並依稻作坵塊組合邏輯分析成果,將稻作坵 塊以高、中、低變動性的方式來呈現稻作坵塊時空 變化之情形(如圖 10)。
經由稻作坵塊時空變化度分析成果顯示,坵塊
穩定性資訊可用來輔助外業調查資料,其中,高度 穩定常態水稻坵塊以及非現況水稻之坵塊,其外調 特徵為無需外調或是較低機率之外調抽樣,而且非 現況水稻坵塊多是轉作休耕田;但在中低度穩定常 態水稻坵塊或新增坵塊等變動性較大之區域,本研 究建議要增加外調抽樣機率。這樣的判釋邏輯推論 是根據資訊理論當中的Entropy 概念轉化而來的,
由於在97 年當中明確是水稻與明確不是水稻的坵
塊田,在資訊透露的觀點上來看是確定性最高的結 果,這部分是最不需要人工介入查核的坵塊,反倒 是那些不確定性高的水稻坵塊,是需要高度人工介 入來進一步檢核其精準度。最後透過本研究之成 果,可提供四群不同之外調機率,可大幅減少外調 人員之工作數量,並從作物穩定性分析當中,了解 到土地變動情形,進而做到農田坵塊之有效管理。
表8 逐像元式與物件導向分類器在面積檢核結果矩陣 (a)逐像元分類
單位:Pixel 水稻 非水稻 總和 使用者精度
水稻 1,232,098 166,476 1,398,574 88.10%
非水稻 191,802 4,899,828 5,091,630 96.23%
總和 1,423,900 5,066,304 6,490,204
生產者精度 86.53% 96.71% 94.48%
(b)物件導向分類
單位:Pixel 水稻 非水稻 總和 使用者精度
水稻 1,279,168 119,406 1,398,574 91.46%
非水稻 69,520 5,022,110 5,091,630 98.63%
總和 1,348,688 5,141,516 6,490,204
生產者精度 94.85% 97.68% 97.09%
表9 稻作坵塊 NDVI 數值特性
稻作坵塊最大值 稻作坵塊最小值 稻作坵塊平均值 整體標準差
NDVI 值 0.658 0.416 0.525 0.084
表10 坵塊組合表
坵塊套疊組合 重疊部分 穩定坵塊定義
1
94 年水稻歷史坵塊存在 95 年水稻歷史坵塊存在 97 年水稻現況坵塊不存在
將成果進行套疊,而萃 取出資訊重疊之部分
非現況水稻坵塊
2
94 年水稻歷史坵塊不存在 95 年水稻歷史坵塊存在 97 年水稻現況坵塊存在
中、低度穩定常態水稻坵塊
3
94 年水稻歷史坵塊存在 95 年水稻歷史坵塊存在 97 年水稻現況坵塊存在
高度穩定常態水稻坵塊
4 其他 97 年水稻現況坵塊 無成果重疊部分 新增水稻坵塊
(a)稻作坵塊屬性資料新增前(部分) (b)稻作坵塊屬性資料新增後(部分)
(c) 稻作坵塊圖形資料 圖9 稻作坵塊屬性資料與圖形資料
新增 水稻坵塊
高度穩定常態 水稻坵塊
中、低度穩定常態 水稻坵塊
非現況 水稻坵塊 圖10 稻作坵塊時空變化度分析
5. 結論與建議
本研究欲發展一套結合坵塊尺度與資料挖掘 技術的新分類器。首先將影像透過區塊化方式分割 成塊狀結構。其次再使用ROEBC 分類模式進行影 像分類,進而形成水稻田物件的基本型態。最後再 比較與討論區塊化分類後影像(ROEBC)與逐像元 分類(MLC)成果兩者間之差異性。研究成果顯示,
使用ROEBC 分類器可在各別波段產生切割點後並 計算出每個屬性的 IG 值。基本上 IG 值代表資訊 的分類能力,在此IG 值愈大代表影像分類的資訊 能力愈高。本研究選擇使用累積 IG 百分比大於 60% 為門檻值,可得到 IR-Homo、B、G 與 IR 等 4 個波段後,利用上述 4 個波段並藉由波段組合的 方式建立出所謂的分類知識規則。此項分類知識規 則可以成功的將複雜的影像資訊問題,轉化成一階 邏輯概念的程序表達形式,也就是所謂的 IF…
THEN 法則,這個形式會比傳統的統計參數式分類 法則(如 MLC 法)更能有效的表達出影像的知識內 涵,也可避免分類樣本通常會不符合統計參數式分 類器所需要統計分佈假說的問題。就結果而言,逐 像元分類器是利用 Pixel-based 的概念進行分類,
而物件導向型分類器則是利用Regional-based 的概 念進行影像分類,因此在結果上無點狀雜訊之情形 (椒鹽效應),且從影像結果上可看出,物件導向型 分類器採用區塊結合生成的關係,也就是說,將外 部的結構與內部數值接合後取出平均值。由於區塊 化的關係,除了可降低了像元式分類中的椒鹽效應 的可能性,亦較容易分析出區域之間的判斷,減少 面積上的損失,由此可知物件導向式的分類方法比 傳統逐像元式分類方法更容易取得完整之坵塊結 構資訊。
另一方面,本研究從點檢核與面檢核的觀點來 討論兩種概念分類器所造成之差異。就點檢核的成 果顯示,物件導向式分類器之點檢核精度結果 (整 體精度:92.29%、Kappa 統計:0.8426)的確高於逐 像元分類器之精度結果(整體精度:88.57%、Kappa 統計:0.7655)。而面檢核的數據顯示,逐像元式分 類器在目標分類上的整體正確率為 94.48%,誤判
率與漏判率分別為13.47%與 11.90%;而物件導向 分類的整體正確率為 97.09%,誤判率與漏判率分 別為5.15%與 8.54%。表示物件導向分類器不管是 在整體影像主題圖繪製目標上或在水稻物件錯判 與遺漏的控制上,皆會優於逐像元式分類成果。不 過另一方面,物件導向分類器的成果當中仍然存在 一些誤漏判問題,本研究仔細檢視上述發生的原 因,發現上述問題的誤判多是因為區塊在生成過程 中樣本之光譜、紋理等屬性過於相近,造成目標物 與非目標物聚合在一起所造成的誤判。以及目前的 知識供給程度只用了四個波段,因知識表達能力不 夠所造成之漏判結果。由於航照在知識供給上並非 是完整而且理想(其空間解析力理想但時間與波長 解析力就不一定理想),這部分還有待後續的研究 持續努力解決問題。不過整體而言,本研究所使用 之物件導向式分類器其整體精度較高,而其個別的 誤漏判機率比較低而且也比較相近,這也顯示本研 究所使用的物件導向式分類器在製作水稻主題圖 上要比傳統逐像元的方式更為的理想與成功。
致謝
本文特別感謝行政院農糧署提供相關之研究 經費,行政院農糧署黃淑娟技正提供水稻調查基礎 資料。農林航空測量所吳水吉副所長提供研究材 料、諮詢與許多相關之協助。此外兩位匿名審查的 委員,也提供許多寶貴的意見給本文作者進一步的 參考,本文作者在此特別感謝它們無私的貢獻與協 助。
附錄
表2 步驟(c)的詳細說明:例如
1| 3
1 13 p i t j 表 示,當切割點為FCP
t3
時, j1(屬性值小於 130)的資料 (包含x7、x8及x1)中,i 1
(決策類 別 為 1) 的 資 料 所 佔 的 比 例 為 13 ,
2 | 3
1 23
p i t j 表示,當切割點為FCP
t3
時, j1的資料中,i2(決策類別為 2)的資料所 佔的比例為 ;
1| 3
2 57
p i t j 表示,當切割點 為FCP
t3
時, j2(屬性值大於 130)的資料 (包含x9、x2、x3、x4、x10、x5和x6)中,i1(決 策 類 別 為 1) 的 資 料 所 佔 的 比 例 為 57 ,
2 | 3
2 27
p i t j 表示,當切割點為FCP
t3
時,j2的資料中,i2(決策類別為 2)的資料所 佔的比例為 2
7。
參考文獻
李建德、黃鐘賢 (1999) Fuzzy C-means 演算法於彩 色影像自動分割之研究,全國計算機會議,頁 C99-C106。
莊政斌(2004)影像分割技術於高解析衛星影像分 類之應用,國立中央大學土木工程研究所碩士 論文。
黃沛羣(2008) 以資訊探勘技術改進隔震設計參數 之策略,國立中興大學土木工程學系所博士論 文。
萬 絢 、 閻 嘉 義 (2009) 以 亂 數 基 礎 分 類 法 和 Fuzzy-C-means 分群法分析土石流判釋問題,
水保技術,4(1):37-46。
雷祖強、周天穎、鄭丁元 (2007) 應用半變異元模 式於QuickBird 影像中植生類別分類特性之研 究,航測與遙測學刊,12 (1) :1-16。
雷祖強、李哲源、葉惠中、萬絢 (2009) 以區塊化 物件分類法萃取ADS-40 影像中水稻田坵塊資 訊之研究,航測與遙測學刊,14 (2): 127-140。
鄧敏松 (1997) 結合多時段遙測影像、耕地坵塊與 領域知識之區域式影像辨識法於水稻田耕作 調查之應用,國立成功大學測量工程研究所碩 士論文。
蕭國鑫、劉治中、徐偉城 (2004) 不同影像分類方 法應用於水稻辨識之探討,航測與遙測學刊,
9 (1) :13-26。
鄭雅文、史天元、蕭國鑫(2008)物件導向分類於高 解析度影像自動判釋,航測及遙測學刊,
13(4):273-284。
Adams, R., Bischof, L., (1994) Seeded Region Growing, IEEE Trans. Pattern Anal. Mach.
Intell, 16 (6):641–647.
Blaschke, T., and Strobl, J., (2001) What’s wrong with pixels? Some recent developments interfacing remote sensing and GIS, GeoBIT/GIS, 6:12-17.
Espindola, G. M., Camara, G., Reis, I. A., Bins, L. S., and Monteiro, A. M (2006) Parameter selection for region growing image segmentation algorithms using spatial autocorrelation, International Journal of Remote Sensing, 27:3035-3040.
Gitas, I. Z., Mitri, G. H., and Ventura, G., (2004) Object-based image classification for burned area mapping of Creus Cape Spain, using NOAA-AVHRR imagery, Remote Sensing of Environment, 92:409-413.
Haralick, R.M., Shaunmmugam, K. and Dinstein, I., (1973) Textural Features for Image Classification, IEEE Transaction System, Man, and Cybernetics, 67:786-804.
Kamagata N., Hara K., Mori M., Akamatsu Y., Li Y.
and Hoshino Y., (2006) A new method of vegetation mapping by object-based classification using high resolution satellite data, Japan Socity of Photogramm Remote Sensing, 45:43–49 (in Japanese with English abstract) Lei, T. C., Wan, S., and Chou, T. Y., (2008) The
comparison of PCA and discrete rough set for feature extraction of remote sensing image classification – a case study on rice classification, Taiwan, Computational Geosciences, 12:1-14.
Liu, W, Wu, Z., and Pan, G., (2005) An Entropy-Based Diversity Measure for Classifier Combining and Its Application to Face Classifier Ensemble Thinning, Lecture Notes in Computer Science, 2005, Volume 3338:439-516.
Lu, D., and Weng, Q., (2007) A survey of image classification methods and techniques for improving classification performance, International Journal of Remote Sensing, 28:823-870.
Magimai-Doss, M., Hakkani-Tur, D., Cetin, O., Shriberg, E., Fung, J. and Mirghafori, N., (2007) Entropy Based Classifier Combination for Sentence Segmentation, ICASSP 2007, 4:189-192.
Magnussen, S., Boudewyn, P., and Wulder, M., (2004) Contextual classification of Landsat TM images to forest inventory cover types, International Journal of Remote Sensing, 25:2421-2440.
Maruyama, T., Kawachi, T. and Singh, V. P., (2005) Entropy-based assessment and clustering of potential water resources availability, Journal of Hydrology, 309:104-113.
Murakami T., Onishi N., Kajisa T., Mizoue N., Yoshida S., (2010) Examination of the optimum segmentation in the object-based image analysis for forest stand type classification, Japan Socity of Photogramm Remote Sensing, 49:159–165 (in Japanese with English abstract)
Rouse J. W. , Haas R. H., Schell J. A. and Deering, D.
W., (1973) Monitoring vegetation systems in the great plains with ERTS, In Third ERTS Symposium, NASA SP-351, Washington, DC.
1:309-317.
Salvi, G., (2006) Segment boundary detection via class entropy measurements in connectionist phoneme recognition, Speech Communication, 48, pp.1666-1676.
Sonka M., Hlavac V. and Boyle, R., (1998) Image processing: analysis and machine vision, Introduction to Transportation Engineering (ITE), United States of America, 2nd. ed.
Soille P., (1999) Morphological image analysis:
Principles and applications, Springer-VerlagTelos, ISBN-3540656715.
Thomas, N., Hendrix, C., and Congalton, R.G., (2003) A comparison of urban mapping methods using high-resolution digital imagery, Photogrammetric Engineering and Remote Sensing, 69:963-972.
Walter, V., (2004), Object-based classification of remote sensing data for change detection, ISPRS Journal of Photogrammetry & Remote Sensing, 58: 225-238.
Wan, S., Lei, T. C., Chou, T. Y., (2010) An enhanced supervised spatial decision support system of image classification: consideration on the ancillary information of paddy rice area, International Journal of GIS, 24(4):623-642.
Wan, S., (2009) A spatial decision support system for extracting the core factors and thresholds for landslide susceptibility map, Engineering Geology, 108:237-251.
Wang, L., Sousa, W. P., and Gong, P., (2004) Integration of object-based and pixel-based classification for mapping mangroves with IKONOS imagery, International Journal of Remote Sensing, 25(24):5655–5668.
Xia, R., Zong, C., and Li, S., (2011) Ensemble of feature sets and classification algorithms for sentiment classification, Information Sciences, 181:1138-1152.
Zhu, X. Q., and Davidson, I., (2007) Knowledge Discovery and Data Mining: Challenges and Realities. Hershey, New York.
ISBN 978-159904252-7.
1 Associate Professor, Department of Urban Planning and Spatial Information, Received Date: Feb. 09, 2012 1 Feng Chia University Revised Date: Nov. 09, 2012 2 Professor, Department of Information Management, Ling Tung University Accepted Date: Nov. 25, 2012 3 Master, Department of Urban Planning and Spatial Information, Feng Chia University
4 Master, Department of Environmental and Spatial Information Science and Technology. Feng Chia University
5 Project Management, Geoforce Techniques Co. Ltd.
*.Corresponding Author, Phone: 886- 4-24517250 ext.3357, E-mail:[email protected]
Paddy Rice Objects Generating and Mapping Model Using Aerial Digital Image Data
Tsu-Chiang Lei
1*Shiuan Wan
2Cheng-Yi Huang
3Che-Yuan Li
4Chih-Hao Ou-Yang
5ABSTRACT
Paddy rice is one of the major food crops in Taiwan. The government investigated the paddy rice area through aerial photography every year. However, paddy rice thematic maps require using much manpower which is very time-consuming and funding. How to quickly obtain this geo-information through very high-resolution aerial photographs is an important research issue. In this study, we want to develop a novel decision model (Region Object-oriented Entropy Based Classifier, ROEBC) which integrates the patch-scale information and Entropy Base Classifier. It also compares these results of traditional concept of pixel-based classifier by Maximum Likelihood Classifier (MLC). The ROEBC categories decision model can find the ideal cutting point from each spectral band through the value of attributes on Information Gain (IG). Based on these IG values, we can obtain rules from image information successfully. This method can clearly show the differences on image knowledge rule content by the traditional statistical parameter classifier (such as MLC). After that, in this study, we check the point accuracy and area accuracy at paddy rice thematic maps with MLC and ROEBC methods, respectively. It shows that the regional based classifier of ROEBC methods is better than those of the pixel based classifier of MLC. Finally, this study discussed the feasibility of paddy rice object results combine with other GIS data on the agriculture information management issues of future projects.