國立臺灣大學醫學院暨工學院醫學工程學研究所 碩士論文
Institute of Biomedical Engineering College of Medicine and Engineering
National Taiwan University Master Thesis
動態式脊椎固定器之測試方法設計 Development of Hybrid Testing Apparatus
for Dynamic Spine Stabilizer
王朝何 Wang, Chau-Ho
指導教授:王兆麟 博士 Advisor: Wang, Jaw-Lin Ph.D.
中華民國 97 年 7 月
July, 2008
中文摘要
背景:動態穩定系統是近年來改善脊椎融合術併發症的有效方法之一,為了測試 動態穩定系統的有效性,有必要建立一套測試系統。
目的:以混成測試法為基礎,建立一可執行扭矩控制與角度位移控制的連續式彎 矩測試機台,接著以混成測試法,測試新型的動態穩定系統(Prototype of Dynamic Stabilizer,PDS)效能,並探討桿件的剛性與長度,對PDS系統效能的影響。
材料與方法:混成法測試機台,可測試單節或多節脊椎運動單元。機台利用馬達 作動力輸出,藉由伸縮導桿組和上夾具傳達扭矩予試樣產生連續式純彎矩負載;
LabVIEW 程式即時監控扭力計與角度計訊號,控制馬達動力輸出方向、停止;CCD 連續拍攝旗標上反光點的移動,藉由直接線性轉換法求得椎骨運動角度。機台完 成後,選用一副人的腰椎(L1-L4),先施予± 8Nm 的純彎矩,量測該試樣的總活動
度(tROMintact)及各節椎骨活動度(iROMintact)。接著在 L2-3 節依序進行椎間盤傷
害,植入 Dynesys 與 PDS 等裝置,然後對試樣施予純彎矩,直到試樣彎曲至與未 受處置前的總活動度(tROMintact)為止,紀錄此時各節椎骨活動度(iROMconstruct)。替 換 PDS 系統的桿件材質以及長度,重複測試步驟。
結果:CCD 量測的精度為(±0.12°);系統中扭力與角度位移控制精度為(±0.1Nm、
±0.2°)。腰椎(L1-L4)在前彎後仰的總活動度為 28.9°。L2-3 椎間盤受損並裝上 Dynesys 後,L2-3 及 L1-2 (上鄰近椎節)活動度減少(51.1%,42.5%),L3-4 (下鄰近 椎節)活動度增加(42.3%)。若改換 PDS 系統,各椎節活動度的增、減趨勢與 Dynesys 相同,分別為 L2-3 減少(21.5%),L1-2 減少(55.7%),L3-4 增加(22.8%)。短桿件對 不穩定椎節的固定效果比長桿件好,但會增加上鄰近椎節的活動度。
結論:本實驗成功架構一混成測試機台,能有效探討脊椎運動元在不同手術處置 後,各椎節的活動度變化。本實驗發現:(1)Dynesys 雖比 PDS 系統較更能重建 不穩定椎節的穩定度,但卻會提高下鄰近椎節提早退化的風險;(2)PDS 系統的 效能可藉由提高桿件的剛性、降低桿件的長度來改善。
【關鍵詞】腰椎、混成法、動態穩定系統、生物力學、剛性、椎弓螺絲
ABSTRACT
Objective. To establish a hybrid testing apparatus that provides “moment-control mode”
and “angular-displacement-control mode”. The effect of the rod stiffness and that of the rod length on a prototype of dynamic stabilizer (PDS) were investigated using the current testing apparatus.
Summary of Background Data. Dynamic spine stabilizer is a newly developed method to diminish the prevalence of early degeneration in adjacent levels. To estimate the effect of dynamic spine stabilizer, it is necessary to establish a testing apparatus.
Methods. Using the established testing apparatus, a prototype of dynamic spine
stabilizer(PDS)was tested on a cadaver lumbar spine (L1-L4). Following the hybrid testing protocol, the specimen was applied with a sagittle bending moment of± 8Nm to obtain the range of motion (ROM) of the whole specimen (tROMintact) and the ROM of each individual level (iROMintact) included in the whole specimen. The L2-3
intervertebral disc was damaged at the outer anular fibrosus using a scapal, and then implanted with Dynesys and the PDS. The specimen was sagittaly bended to the ROM which was obtained with the application of ± 8Nm in the first place. The ROM of each individual level (iROMconstruct) was measured simultaneously. The hybrid testing
protocol was repeated while the PDS was replaced with other rods of with different stiffness and different length.
Results. The angular measured precision of the current apparatus is ±0.12°.The precision of system in“moment-control mode"and“angular-displacement-control mode"is ± 0.5Nm and ± 0.2° .Dynesys restored the stability of the injuried L2-3 by 51.1%. The ROM of L1-2 (upper adjacent level) decreased by 42.5% and the ROM of L3-4 (lower adjacent level) was increased by 42.3%. The change of ROM of each individual level after implantation of PDS was in the similar pattern to that of Dynesys, with L2-3 decreased 21.5%,L1-2 decreased 55.7%,and L3-4 increased 22.8%. The
stability of the L2-3 was increased with higher rod stiffness and shorter rod length.
Conclusion. A hybrid testing apparatus that is able to perform hybrid testing protocol is successfully developed. Using the established testing apparatus, the present study reveals that 1) Dynesys reduced more ROM of damaged level than the PDS does, but increased the risk of early degeneration in the lower adjacent level; 2) the efficiency of the PDS can be improved by the rod with higher stiffness and shorter length.
【Keywords】hybrid testing protocol、Dynesys, dynamic spine stabilizer
目錄
口試委員會審定書... I
中文摘要...II
英文摘要... III
第一章 序論...1
1-1 脊椎之基本構造... 1
1-2 動態穩定系統... 1
1-3 新式動態穩定系統... 2
1-4 文獻回顧... 3
1-4-1 脊椎穩定度簡介 ... 3
1-4-2 穩定度的量測方式 ... 4
1-5 研究目的... 6
第二章 實驗機台設計 ...7
2-1 混成法測試機台... 7
2-1-1 致動模組 ... 8
2-1-1-1 伸縮導桿組 ... 9
2-1-1-2 上夾具 ... 9
2-1-2 控制模組 ... 10
2-1-2-1 單軸扭力計及校正 ... 10
2-1-2-2 扭矩控制程式 ...11
2-2-2-3 角度位移控制程式 ...11
2-1-3 量測模組 ... 12
2-1-3-1 CCD即時錄影程式 ... 12
2-1-3-2 CCD及影像校正 ... 13
2-1-3-3 運動分析 ... 14
2-1-3-4 運動追蹤程式 ... 15
第三章 材料與方法...17
3-1 實驗材料... 17
3-2 實驗設計... 17
3-3 實驗流程... 18
第四章 實驗結果...20
4-1 系統精度測試... 20
4-2 負載-位移曲線圖 ... 21
4-3 破壞當節椎骨於穩定系統植入前、後的活動度測試結果... 21
4-3-1 新型穩定系統的桿件剛性對椎骨穩定度的影響 ... 23
4-3-2 新型穩定系統的桿件長度對椎骨穩定度的影響 ... 24
第五章 討論...26
5-1 混成法測試機台... 26
5-2 傷害模擬... 26
5-3 PDS系統與Dynesys比較... 27
5-4 影響穩定系統設計的參數... 27
5-4-1 桿件剛性對穩定度的定量 ... 27
5-4-2 桿件長度對穩定度的影響 ... 27
5-5 實驗限制... 28
參考文獻...29
附錄A CCD錄影程式碼 ...31
附錄B 扭矩控制程式碼...32
附錄C 角度位移控制程式碼...35
圖目錄
圖 1- 1 Dynesys穩定系統 ... 2
圖 1- 2 負載-位移曲線圖22... 4
圖 1- 3 活動度、中性區與穩定度之關係20... 4
圖 1- 4 純彎矩負載與側向力負載之差異... 5
圖 2- 1 混成法測試機台主體... 7
圖 2- 2 機台前視圖... 8
圖 2- 3 機台後視圖... 8
圖 2- 4 致動模組(紅色) ... 9
圖 2- 5 伸縮導桿組... 9
圖 2- 6 上夾具... 10
圖 2- 7 扭力計校正平台及線性校正公式... 10
圖 2- 8 扭矩控制程式...11
圖 2- 9 角度位移控制程式... 12
圖 2- 10 CCD即時錄影程式... 13
圖 2- 11 讀取影像至校正程式 ... 13
圖 2- 12 圈選方格的邊緣... 14
圖 2- 13 影像校正前後(校正前/校正後)... 14
圖 2- 14 定位板建立之量測空間... 15
圖 2- 15 A-D運動追蹤程式分析 ... 16
圖 3- 1 PDS結構參數 ... 17
圖 4- 1 扭矩控制... 20
圖 4- 2 角度位移控制... 21
圖 4- 3 負載-位移曲線圖 ... 21
圖 4- 4 新穩定系統與Dynesys活動度表現 ... 22
圖 4- 5 穩定系統與Dynesys 之ALE影響 ... 22
圖 4- 6 桿件剛性對椎骨活動度實驗結果... 23
圖 4- 7 各桿件剛性之ALE影響 ... 24
圖 4- 8 桿件長度對椎骨活動度實驗結果... 25
圖 4- 9 桿件長度對ALE之影響 ... 25
表目錄
表 3- 1 各材料結構剛性... 19
表 4- 1 CCD量測精度... 20
表 4- 2 各種條件下各節椎骨活動度... 23
表 4- 3 各種桿件剛性下之各節椎骨活動度... 24
表 4- 4 不同長度下之各節椎骨活動度... 25
第一章 序論
1-1 脊椎之基本構造
人體的脊柱 (Vertebral column) 有三十三塊脊椎,其中頸椎 (Cervical vertebrae) 七塊、胸椎 (Thoracic vertebrae) 十二塊、腰椎 (Lumbar vertebrae) 五塊、薦骨 (Sacrum) 一塊(由五塊薦椎合成)及尾骨 (Coccyx)一塊(由四塊尾椎合成)。腰 椎具前凸曲度,頂端在第三、四腰椎體前面。此前凸為人類所特有,是在幼兒站 立後才逐漸形成,其成因是因椎體為背負重物而造成椎體及椎間盤前實後薄(尤 其是椎間盤)的特殊外型,是一種續發性的曲度1。
脊椎的主要功能在保護脊髓與神經根、維持身體平衡、吸收能量及抵擋外來 衝擊。除了本身要支撐人體頭部、軀幹及四肢等重量之外還必須得承受外來的荷 重;在日常生活或是工作上的運動功能,脊椎的活動性扮演了相當重要的地位。
腰椎相對於其他椎節所承受的負荷相當大,尤其在人體背、抬、搬、推重物等活 動時,腰椎所承受的負荷則更大,尤其是腰椎下部。因此,腰椎比其它關節較易 早期發生退化性改變,特別是椎間盤內髓核的退化。
椎間盤位於兩脊椎骨的交接處,具有黏彈性性質(visco-elastic properties),主 要由外圍的椎間環(Annulus fibrososus)及中央的椎間核(Nucleus pulposus)組合 而成。其功能為吸震與緩衝,更由於椎間核 90%以上的成分是水,具不可壓縮的 特性,可將脊椎所承受的壓力傳遞至椎間環,由外椎間環提供拘束,使得椎間盤 可以承受壓力。椎間盤約佔脊椎總長度四分之ㄧ。
1-2 動態穩定系統
在近幾十年來,脊椎融合術(spinal fusion)在治療椎骨的畸形(spinal deformity)、運動單元不穩定(Segmental Instability)或狹窄症(stenosis)所引起的疼 痛有非常高的成功率。其原理是將不穩定的椎節固定起來,達到減壓、舒緩疼痛 的目的。但有許多臨床研究指出,就長期影響而言,脊椎融合術會加速鄰近椎節
的退化4,9,10。根據生物力學研究發現,起因是傳統的脊椎固定系統過度限制手術椎
節的活動度,導致鄰近椎節產生應力集中(stress concentration),以及活動度增加 的代償作用。近年來有越來越多的動態穩定系統(dynamic stabilization system)逐 漸發展出來,目的是希望在重建手術椎節的穩定度之餘,尚能容許該椎節有少許
的活動度,藉以避免臨近椎節產生應力集中,產生代償性的過度活動,以改善傳 統穩定系統所造成的臨近節椎間盤提早退化的現象。
Dynesys是目前普遍使用的動態穩定系統之一,具有增進脊椎穩定度,並容許 手術椎節有少許活動度的效果。Dynesys由椎弓螺絲(pedicle screw)、間隔柱
(spacer)、軸索(cord)三個主要元件構成(圖1-1)。間隔柱為材質為聚碳酸酯氨 基鉀酸酯(PCU, polycarbonaturethane)8,軸索則是以聚對苯二甲酸乙二醇酯(PET, polyethylene terephthalate)所構成,勁度為鈦合金螺桿的1/40023。由於其不可拉伸 的特色,故能抵抗手術椎節做前彎的動作。由於間隔柱及軸索的勁度較低,所以 可以在手術椎節被固定於稍微後仰的姿勢之下,尚能做小幅度的後仰活動13,15。 Dynesys的固定效果,手術成功率與傳統的固定式穩定系統相當。Grob等人5調查31 個病人在接受Dynesys植入2年後背痛與下肢疼痛的改善程度,結果顯示20%的病人 認為背痛完全解除,47%的病人覺得背痛減輕。Bothmann 等人11針對50個接受 Dynesys動態脊椎穩定系統植入手術作調查,在術後16個月時,有73%的病人認為 疼痛有減輕。目前Dynesys的專利權掌握在外商公司手中,費用十分昂貴,故無法 在國內普及。目前國內已有研究單位自行發展新的動態穩定系統,若該系統的性 能可以優於Dynesys,則對國人而言不啻是一大福音。本實驗室基於學術研究與產 業的可利用性,與該研究單位著手研究發展該新式穩定系統。
圖 1- 1 Dynesys 穩定系統 1-3 新式動態穩定系統
本研究所測試之新型動態穩定系統(簡稱PDS),以不鏽鋼金屬材料製造,其元 件包含椎弓螺絲、盤型彈簧(剛性約150 N/mm),以及上、下兩個同軸軸件。同軸
軸件特殊的幾何形狀設計,拘束了椎骨在前彎運動時的活動度,置於上、下同軸 軸件之間的彈簧,可在椎骨作後仰動作時產生壓縮變形,並提供手術椎節部分活 動度。抵抗前彎,容許部份後仰的特殊設計,可降低椎間盤因脊椎前彎時產生變 形,擠壓到脊椎神經(spinal cord)而產生疼痛。彈簧可以藉由尺寸的選擇,提供 不同的剛性而有不同之最大變形量,影響椎骨活動度的大小。相較於Dynesys,此 PDS系統中,椎弓螺絲與上、下同軸桿件特殊的固定方式(將桿件夾置於椎弓螺絲
頭部,再以止付螺絲固定桿件),可讓醫師在手術的過程中快速地裝置或拆卸,減
少手術時間,降低病人在手術時受感染的機率。
1-4 文獻回顧
1-4-1 脊椎穩定度簡介
根據Panjabi等人在2003年所提出的理論,組成脊椎穩定度的三要件為:脊柱
(spinal column)、肌肉力量及神經控制元(neural control unit)。脊柱本身的結構,
可以限制不同節段的脊椎於特定方向的活動度,例如:腰椎前彎時的活動度大於 後仰或側轉時的活動度;包覆在脊柱外圍的肌肉群,可藉由本身的主動收縮或張 力,增加脊柱的剛性(stiffness),讓脊柱可以承受較多的軸向壓力而不會產生挫曲
(buckling);神經控制元可以在脊柱運動時,讓部分肌肉做等長收縮提供脊椎適 當的穩定度,讓大肌肉群去執行目標動作。當三者中有一功能有所缺損時,將造 成椎體不穩定20,而產生後背痛。失去穩定度的椎骨,可能會因為活動度過大,而 在作動時壓迫神經,使背部產生疼痛或者出現神經官能不全的症狀。White和 Panjabi等人,在臨床上,對於脊椎不穩定的定義為:在沒有神經缺陷、椎骨畸形 或者肌肉疼痛等情形下,在正常生理負荷(physiologic load)下,脊椎失去維持正 常運動的能力20。
在離體(in-vitro)實驗中,常以活動度(Range of Motion, ROM)及中性區
(Neutral Zone, NZ)作為脊椎穩定度的指標22。中性區的定義為:當脊椎不受負載 或僅承受些微負載時,所產生的角度變化量。活動度的定義為:脊椎承受固定負 載時,產生的最大角度變化量。如圖1-2所示,縱軸為純彎矩大小,橫軸則是脊椎 所對應出的角度變化量。
圖 1- 2 負載-位移曲線圖22
活動度、中性區及椎體穩定度的關係,可以用一顆球在碗裡(ball-in-bowl)
的運動行為來比喻20。只要受到微小的推力,球即可在碗的底部輕易的移動,如同 離體實驗中定義的中性區;但若要讓球往更邊緣的地方移動,就需要更大的推力 才行。脊椎在固定彎矩下的活動度曲線好比是容器的底部形狀,若如同紅酒杯,
則代表脊椎較穩定;若像湯碗,則表示穩定度下降(圖 1-3)。
圖 1- 3 活動度、中性區與穩定度之關係20 1-4-2 穩定度的量測方式
脊椎穩定度的量測是將椎體一端固定,對自由端施予外部負載。當負載形式 為位移大小時,量測試樣所受到的力量及力矩值,並建立力量/力矩-位移的關係 者,稱為「剛性測試」(Stiffness Test)。若是對自由端施予外部負載後觀察椎體的 活動度,則稱為「撓度測試」(Flexibility Test)。在離體生物力學測試中,所提供 的外部負載通常以純彎矩(pure moment)為主,雖不全然符合日常生活中脊椎的 受力情形,但可確保試樣的每一部分受到相同的彎矩值。如圖 1-4 所示,對試樣施
予側向力時,試樣越接近固定端的部分所承受之力矩值越大,但若施予純彎矩,
則試樣各節所承受之力矩值則相同。
圖 1- 4 純彎矩負載與側向力負載之差異 1-4-2-1 混成測試法
病人在從脊椎手術(如:脊椎融合術、人工椎間盤置換術)回到日常生活作息 後,仍然會因為某些需要而使脊椎維持在某些姿勢,例如:綁鞋帶、彎腰提重物…
等;這些動作可能因為病人施行手術的椎骨活動度的增加/減少,造成鄰近節椎骨 的活動度改變,或應力重新分配,造成鄰近椎骨產生不正常的生理變化(例如:提早 出現退化現象),因此研究病人在手術後各節椎骨的力學性質是必要的。Panjabi 等 人在 2006 年所提出「混成測試法」 (hybrid test),用以探討脊椎手術後,「固定節」
與「鄰近節」的生物力學表現21。混成測試法的最大的特色在於,將彎矩負載的兩 種形式--扭矩控制(Moment Control)與角度位移控制(Displacement Control),整 合於同一實驗平台,於實驗時全程對試樣使用純彎矩負載,使試樣的每一部分皆
受到相同的彎矩值。測試法包含三大步驟:(1)先以扭矩控制模式,對多節脊椎
運動單元進行撓度測試(Flexibility Test),得到該脊椎運動單元的總活動度,以及 各椎節的活動度;(2)對該脊椎運動單元施與特殊處置;(3)使用角度位移控制 模式,逐步對該脊椎運動單元增加純彎矩,直到脊椎運動單元位移至未受處置時 的總活動度,即步驟(1)時所測得的總活動度。以量測系統計錄此時該脊椎運動單
元的各節椎骨的活動度。事後分析受測脊椎運動單元在處置後的角度變化量,以 評估欲探討的處置方式對脊椎運動元的影響。
1-5 研究目的
根據文獻回顧,傳統的椎骨後固定器雖然能增強椎骨的穩定度,卻會改變鄰 近節椎骨的活動度或使應力重新分配,加速鄰近椎骨的退化。Dynesys雖具有良好 的穩定效果,成功率與傳統的固定式骨固定器相仿,但缺點是費用昂貴以及在植 入脊椎後,容易發生骨釘鬆脫的現象。雖然國內目前已有單位正在開發一新式動 態穩定系統(PDS),但其效能能否與Dynesys匹敵仍是未知數,本實驗室基於學術 研究與產業的可利用性,與該研究單位一起著手研究發展該新式穩定系統,以期 加速該穩定系統的開發完成。因此,本研究的目的有二:一、以Panjabi等人在所 提出的混成測試法為基礎,建立一可執行扭矩控制與角度位移控制的連續式彎矩 測試機台;2、以混成測試法,驗證該新式動態穩定系統的效能,並探討桿件的剛 性以及長度,對新式動態穩定系統效能的影響。
第二章 實驗機台設計 2-1 混成法測試機台
本研究以混成法(hybrid method)為基礎,發展一套可提供轉矩控制(Moment Control)與角度位移控制(Angular-Displacement Control)的連續式純彎矩負載測 試平台。機台主體架構由鋁擠型組成(長 150 公分 x 寬 100 公分 x 高 115 公分)
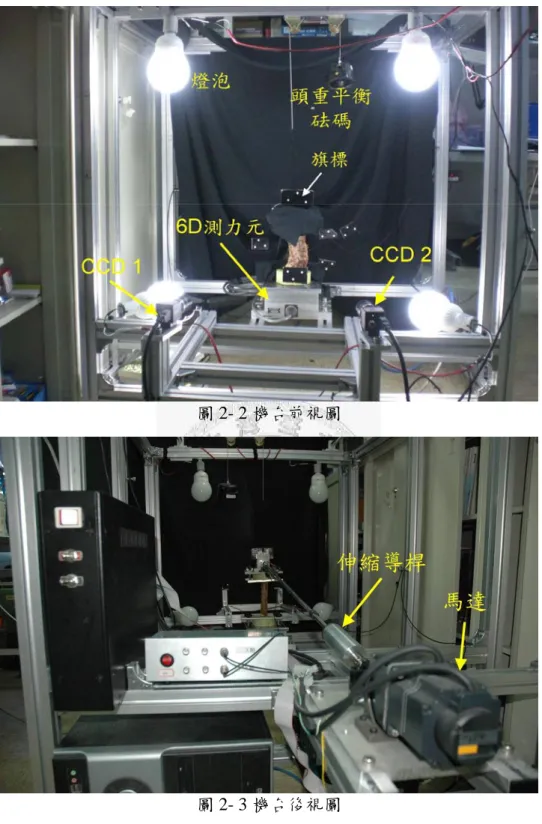
(圖 2-1~2-3),包含致動模組、控制模組與量測模組三部份。馬達為動力輸出來源,
藉由伸縮導桿組傳動負載至試樣頂端,施予試樣純彎矩負載。利用 LabVIEW (由 National instrument 公司所發行之軟體)程式擷取系統中各感測器訊號,並搭配二 台 CCD 紀錄椎骨連續式運動。藉由機器視覺的直接線性轉換法(Direct Linear Transformation,DLT)原理,將連續的二維影像轉換成三維空間中廣義座標的三 維旋轉量,以分析試樣的運動情形。
圖 2- 1 混成法測試機台主體
圖 2- 2 機台前視圖
圖 2- 3 機台後視圖 2-1-1 致動模組
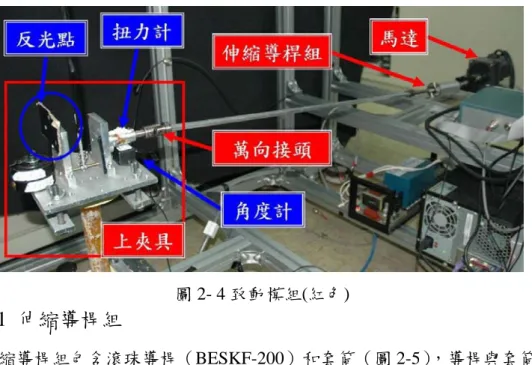
如圖 2-4,致動模組包含馬達(東方馬達公司,BX460AM-200)、伸縮導桿組,
以及一上夾具。伸縮導桿全長 90 公分,有 10 公分的伸縮行程。前端為長度 70 公 分的鋁桿,後端以高剛性聯軸器串聯相接具有 10 公分伸縮行程的伸縮套筒。
圖 2- 4 致動模組(紅色) 2-1-1-1 伸縮導桿組
伸縮導桿組包含滾珠導桿(BESKF-200)和套筒(圖 2-5),導桿與套筒可以 前後滑動不相對旋轉的機構設計讓伸縮導桿只傳送扭矩而不產生軸向推力。另 外,導桿的前後端各接上萬向接頭,使導桿可隨試樣移動而跟隨不受拘束。導桿 可傳達馬達輸出的扭矩到試樣端,並使試樣在受到負載後保持在主平面(principle plane)上運動。
圖 2- 5 伸縮導桿組 2-1-1-2 上夾具
上夾具有頭重平衡裝置,可平衡夾具重量,夾具上置有單軸扭力計與雙軸角 度計(如圖 2-6)。上夾具全重約 1.5 公斤,夾具重心位在平板中心上方約 0.5 公分處。
為了不讓上夾具重量直接施加於受測試樣上,影響椎骨運動表現,所以在上夾具 重心處吊起 1.5 公斤的砝碼,繞過頭重平衡裝置平衡上夾具重量。上夾具的功能主 要是固定受測試樣的頂端,並且傳達純彎矩負載予試樣。夾具上有單軸扭力計以 及雙軸角度計,透過 LabVIEW 程式可以即時(real time)存取監控單軸扭力計和 雙軸角度計輸出的類比電壓,控制馬達運轉方向或停止運轉。
2-1-2 控制模組
控制模組訊號來源為夾具上之單軸扭力計以及角度計,藉由此訊號,可控制馬達 的輸出扭力或角度。
2-1-2-1 單軸扭力計及校正
單軸扭力計主要監測馬達輸出扭矩,當測試機台在扭矩控制模式下時,馬達固定 速度運轉施予扭矩,LabVIEW 程式同步監測並儲存扭力計輸出的類比電壓,套入 校正公式轉換成真實扭矩。扭力計的校正方法如下;先將扭力計固定於校正平台 上(圖 2-7),前端架上力臂,在左右兩端懸吊砝碼產生順/逆時針扭矩,控制輸入 扭矩,計錄扭力計輸出之電壓。最後將扭矩值與電壓值作線性迴歸,計算校正公 式(圖 2-7)。
圖 2- 6 上夾具
圖 2- 7 扭力計校正平台及線性校正公式
2-1-2-2 扭矩控制程式
首先設定數據的擷取頻率,輸入馬達的順、逆時針扭矩值及扭力計校正公式,
選擇是否存檔(圖 2-8)。記錄的參數主要為扭力計、角度計和 6D 測力元的電壓值。
試樣從中立姿勢(neutral position)出發,完成前彎-後仰後再回到中立姿勢後,視為 一個完整循環負載,每次測試執行三個循環。當啟動鈕觸發馬達運轉後, LabVIEW 每 0.5 秒收集一次扭力計電壓值判斷,當電壓達到所設定之電壓值時,LabVIEW 再發送一訊號使馬達改變轉動方向或停止。
圖 2- 8 扭矩控制程式 2-2-2-3 角度位移控制程式
設定數據的擷取頻率,輸入馬達在正、負轉向時試樣所需達到之角度值,選 擇是否存檔(圖 2-9)。試樣從中立姿勢(neutral position)出發,完成前彎-後仰後再 回到中立姿勢後,視為一個完整循環負載,每次測試執行三個循環。按下啟動鈕 觸發馬達運轉後,馬達即以固定轉速轉動,此時 LabVIEW 每 0.5 秒會收集一次角 度計電壓值判斷,當電壓達到所設定之電壓值時,LabVIEW 再發送一訊號使馬達 改變轉動方向或停止。
A. 擷取頻率 B. 輸入扭矩 C. 存檔鈕 D. 緊急停止鈕
圖 2- 9 角度位移控制程式 2-1-3 量測模組
量測模組由二台 CCD 攝影機構成,CCD 攝影機可連續記錄旗標上反光點的移 動,利用「直接線性轉換法」(Direct Linear Transformation,DLT),將相機所記錄 的二維座標轉換為三維座標,再運算得到椎體的三維運動度變化。試樣下方的 6D 測力元可量測到試樣底部所受到的三軸軸向力量以及三軸力矩。
2-1-3-1 CCD 即時錄影程式
此 CCD 即時錄影程式介面是由軟體 LabVIEW 所撰寫,首先設定影像存檔的 路徑(左右兩邊 CCD 需設定不同存檔路徑),輸入影像每秒存取張數(fps),選擇是 否存檔即將錄影之影像,按下啟動扭程式後,即開始錄影,若欲停止錄影時按下 停止鈕即可。圖 2-10 中,G 處的地方會即時顯示出目前 CCD 所拍攝到之影像。
A. 擷取頻率 B. 輸入角度 C. 存檔鈕 D. 緊急停止鈕
圖 2- 10 CCD 即時錄影程式 2-1-3-2 CCD 及影像校正
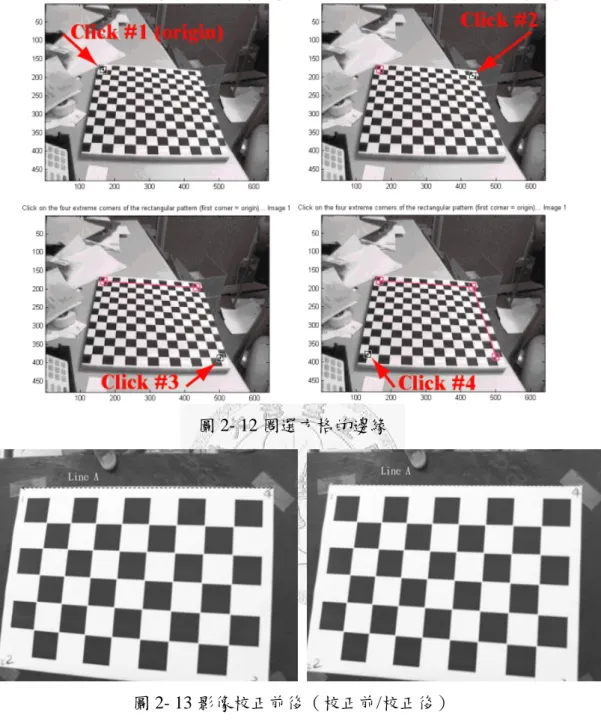
CCD 是選用 Guppy F-033C 系列機,其特色為支援 1394 高速傳輸介面,相較 於 CMOS 有較高之影像擷取頻率、高影像品質及較佳的暗處感光度和銳利度。由 於 CCD 影像會有扭曲失真的情形,因此必須藉由程式來進行影像校正,其校正方 法如下(圖 2-11、2-12):(1)首先印出一張由黑白方格所組成的 A4 紙,將其貼在 平面木板上,固定 CCD 位置及焦距(2)在 CCD 的視野內,拍攝 A4 紙在各個位 置與角度的影像(3)讀取影像至影像校正程式中(4)圈選影像中黑白方格的邊 緣,共四點(5)得到影像校正方程式(6)輸入公式校正影像(圖 2-13)2。
圖 2- 11 讀取影像至校正程式
A. 存檔路徑 B. 每秒存取張數 C. 觸發模式 D. 擷取頻率 E. 存檔 F. 停止鈕 G. 即時影像
圖 2- 12 圈選方格的邊緣
圖 2- 13 影像校正前後(校正前/校正後)
2-1-3-3 運動分析
利用兩台 CCD,連續拍攝各個旗標(marker flag)上反光點的移動,藉由程 式分析可得知椎骨在三維空間中的運動變化。程式分析的部份,則是利用『直接 線性轉換法』(Direct Linear transformation,DLT),將 CCD 所拍攝到的二維影像座 標轉換為三維座標,進而求出椎骨在三維空間中的運動變化。
『直接線性轉換法』,必須建立影像中二維座標與空間中三維座標的直接線性 關係;因此,必須固定 CCD 的焦距以及兩 CCD 之間的距離。空間中的一點可由 左右 CCD 所拍攝到的照片同時呈現,並提供二個方程式,因此必須再藉由空間中
已知座標的六個控制點(control point)所提供的十二條方程式來滿足轉換關係的 矩陣計算,進行空間座標定位7。
我們製作一 33.5 公分 x 30 公分 x 30 公分的定位板(圖 2-14),作為已知座標 定位的方式。定位板中設置 12 個座標控制點供使用者在操作時自由選取,控制點 的選取原則以可能包含待測物的最大運動範圍為主。
圖 2- 14 定位板建立之量測空間 2-1-3-4 運動追蹤程式
主要執行步驟如下:首先,在事先建立好的三維空間座標系統中選取參考點 並輸入參考點的座標值於撰寫好的運動分析程式中(圖 2-15A),接著選取旗標上的 反光點,三個反光點構成一組運動分析單位(圖 2-15B)。程式會自動追蹤所選取的 反光點直到運動結束(圖 2-15C),最後由座標間的反運算求得標的物的三維運動情 形(圖 2-15D)
(A)三維空間座標系統 (B)三個反光點構成一組運動分析單位
(C)程式會自動追蹤所選取的反光點 (D)標的物三維運動分析 圖 2- 15 A-D 運動追蹤程式分析
第三章 材料與方法
3-1 實驗材料
試樣準備:本實驗使用一副人的腰椎(L1-L4,男性、86 歲、55 kg、BMD=0.656 g/cm^2、T-score=-3.1),清除椎體周邊的肌肉、韌帶等週邊組織,將 L1 及 L4 節包 埋於補土,補土與 L2-3 的椎間盤位置相互平行,L2-3 的椎間盤處於水平位置時定
義為椎骨的「中立姿勢」。最後將試樣覆蓋上沾溼生理食鹽水的紗布,放入雙層密
封袋裡,保存於恆溫攝氏零下 20 度 C 的冷凍冰箱中。在實驗前,試樣由冷凍冰箱 中取出放置於攝氏 25 度 C 的室溫下退冰至少 6 小時。等試樣完全退冰之後,將試 樣架設於測試系統中。固定試樣的上、下補土於機台夾具上,並且觀察上下補土 與 L2-3 的椎間盤是否皆維持水平位置。實驗過程中,定時對試樣噴灑食鹽水,避 免水分的流失造成試樣的材料性質改變,影響實驗結果。
3-2 實驗設計
實驗設計分成兩階段,第一階段為前導實驗,藉著量測正常腰椎於固定彎矩 下的活動度,與文獻上的資料做比較,以驗證量測系統的正確性。接著將試樣中 的一個椎間盤進行人為破壞後,並分別植入現有的 Dynesys 穩定系統以及尚在研 發階段的 PDS 系統,驗證 PDS 系統的效能是否提供椎骨足夠的穩定度,以及是否 與 Dynesys 在效能上有所差異。第二階段進一步討論,PDS 系統的桿件剛性
(stiffness)與桿件長度對手術當節與鄰近節穩定度的影響(圖 3-1)。
圖 3- 1PDS 結構參數
3-3 實驗流程
正常椎骨曲性測試(flexibility test):在矢狀面(sagittal plane)上對試樣施予純彎 矩負載,量測正常腰椎的中性區(NZ, neutral zone)、總活動度(total range of motion,
intact
tROM )及各節椎骨活動度(iROMintact)。中性區的定義為在負載開始與終止時,
試樣的角度位移量,總活動度的定義為在試樣受到最大負載時所相對應的最大角 度位移量。上補土在水平位置時為負載的起始與結束位置。馬達以每秒 4.2 度的速 率運轉,負載邊界值為±8Nm。負載方向為:中立Æ前彎Æ後仰Æ前彎Æ中立。實 驗開始之前,先對試樣進行兩次的預負載(precondition load)。從第三次負載開始,
並重複進行六次,以計算平均值及標準差。實驗過程中每隔五分鐘對試樣噴灑生 理食鹽水,保持試樣溼度。
手術模擬及穩定度測試:首先以手術刀劃傷腰椎 L2-3 間的椎間環,以模擬退 化後的椎間盤,接著對試樣進行純彎矩負載,負載邊界值為上述由曲性測試獲得 的正常腰椎總活動度(tROMintact),並於負載過程中紀錄各節椎骨的活動度
(iROMinjury)。接著先後在 L2、L3 椎骨植入 Dynesys 穩定系統以及 PDS 系統。之
後,再對試樣作一次穩定度測試,穩定系統的植入由有經驗的外科醫師操作。
接著使用不同材質、不同長度的桿件來替換 PDS 系統原有的桿件。各替換桿 件的材質與剛性如表 3-1 所示,當測量桿件剛性對腰椎穩定度的影響時,使用的桿 件大小與原始桿件一致(直徑 5.5 公釐,長度 3.5 公分的圓棒)。當替換不同桿件長 度時,桿件長度由脊椎外科醫師決定,以讓試樣維持在中立姿勢的間距為基準(左 側長度 22 公釐,右側長度 18 公釐),增加 4 公釐定義為長桿件,減少 4 公釐為短 桿件。每替換一種桿件後,即對試樣進行一次穩定測試,測試方式如前所述。
表 3- 1 各材料結構剛性
數據分析與統計:各節椎骨於椎間盤破壞以及各穩定系統植入後的活動度變 化(ALE,adjacent level effect)依下列公式計算。活動度變化的顯著性則使用重覆量數 分析法(repeated measures analyze)來評估。
ALE(%) = 100*(iROMconstruct –iROMintact)/ iROMintact 材料 結構剛性 (N/mm)
鐵氟龍 368 塑鋼 2118 鋁 45160 鈦金屬 83154
第四章 實驗結果
4-1 系統精度測試
CCD 精度量測是藉由已知精度為±0.02 度的分度盤為基準,旋轉分度盤的角度 讓 CCD 拍攝並分析,計算角度輸入、輸出值及誤差。由表 4-1 得知 CCD 量測精 度約為±0.12 度。另外,分別設定系統中扭矩控制及角度位移控制程式的扭矩、角 度輸入值,重複動作系統數次紀錄其控制精度及重現性;得知系統控制精度約為
±0.1Nm、±0.2°。
CCD 量測精度
分度盤 0 5 10 20 40 60
CCD 0 4.88 9.92 19.9 39.68 59.95
誤差 0 0.12 0.08 0.1 0.32 0.05
分度盤 0 -5 -10 -20 -40 -60
CCD 0 -4.84 -9.88 -19.85 -39.95 -59.59
誤差 0 0.16 0.12 0.15 0.05 0.41
誤差:±0.12 度
表 4- 1CCD 量測精度
圖 4- 1 扭矩控制
圖 4- 2 角度位移控制 4-2 負載-位移曲線圖
圖 4-1,為試樣在±8Nm 負載下的負載-位移曲線圖,縱軸表示腰椎的角度,曲 線趨近於”S”型。因為生物試樣具有黏彈性的特質,隨著負載的循環,試樣的移動 角度不會在同一條曲線上,而有遲滯區。試樣前彎-後仰的總活動度=28.9°,Panjabi 等人在有跟隨力(follower load)時所量測到的腰椎活動度為 26 度19,兩者十分接 近,由此可看出本實驗機台具有高度的可信度。
圖 4- 3 負載-位移曲線圖
4-3 破壞當節椎骨於穩定系統植入前、後的活動度測試結果
與正常椎骨相比,L2-3 椎間盤受損後,該節穩定度變差,活動度增加 68.7%,
上鄰近節椎骨(L1-2)活動度減少 42.5%;下鄰近節(L3-4)活動度沒有顯著性變化,
僅增加 0.8%。當 L2-3 裝上 Dynesys 穩定系統後,穩定度提高,活動度減少 51.1%,
上鄰近節椎骨(L1-2)活動度減少 42.5%,下鄰近節(L3-4) 增加 42.3%。PDS 系統效 果不如預期,L2-3 活動度只減少 21.5%,上鄰近節椎骨(L1-2)減少 55.7%,下鄰近節 (L3-4)活動度增加 22.8%。(圖 4-2、圖 4-3、表 4-1)
圖 4- 4 新穩定系統與 Dynesys 活動度表現
L2-3 Injury Flexion/Extension
-100 -80 -60 -40 -20 0 20 40 60 80 100
L3-4 L2-3 L1-2
Intervertebral level
Changes in iROM (%) -42.5
0.8
68.8
L2-3 Injury Flexion/Extension
-100 -80 -60 -40 -20 0 20 40 60 80 100
L3-4 L2-3 L1-2
Intervertebral level
Changes in iROM (%) -42.5
0.8
68.8
L2-3 Dynesys Flexion/Extension
-100 -80 -60 -40 -20 0 20 40 60 80 100
L3-4 L2-3 L1-2
Intervertebral level
Changes in iROM (%) -42.3
44 17.6
L2-3 Dynesys Flexion/Extension
-100 -80 -60 -40 -20 0 20 40 60 80 100
L3-4 L2-3 L1-2
Intervertebral level
Changes in iROM (%) -42.3
44 17.6
L2-3 New design Flexion/Extension
-100 -80 -60 -40 -20 0 20 40 60 80 100
L3-4 L2-3 L1-2
Intervertebral level
Changes in iROM (%) -55.8
22.8 47.2
L2-3 New design Flexion/Extension
-100 -80 -60 -40 -20 0 20 40 60 80 100
L3-4 L2-3 L1-2
Intervertebral level
Changes in iROM (%) -55.8
22.8 47.2
圖 4- 5 穩定系統與 Dynesys 之 ALE 影響
各節椎骨於前彎-後仰時的活動度 (iROM) (角度)
L1-2 L2-3 L3-4
正常的椎骨 11.31±0.22 9.1±0.43 7.44±0.20
椎間盤退化 6.41±0.20* 14.87±0.14* 7.67±0.15
Dynesys 6.53±0.25* 10.36±0.32* 10.86±0.30*
PDS 5.01±0.05* 12.97±0.17* 9.26±0.15*
*表示與正常椎骨活動度有顯著性差異(P<0.05)
表 4- 2 各種條件下各節椎骨活動度 4-3-1 新型穩定系統的桿件剛性對椎骨穩定度的影響
手術節 L2-3 的穩定度隨著桿件剛性的增加而漸增,與未被破壞時相比,各種 桿件對手術節的活動度皆顯著性減少(平均減少 26.15%)。使用鈦合金桿件時,上 鄰近節 L1-2 活動度較與未被破壞時相比有顯著性的增加,其餘材質的桿件則不會 改變 L1-2 活動度。使用各種材質的替換桿件時,下節鄰近椎骨 L3-4 的活動度皆有 顯著性的增加(平均增加 36%)。(圖 4-4、圖 4-5、表 4-2)
圖 4- 6 桿件剛性對椎骨活動度實驗結果
鐵氟龍 Flexion/Extension
-100 -80 -60 -40 -20 0 20 40 60 80 100
L3-4 L2-3 L1-2
Intervertebral level
Changes in iROM (%) -0.8
32.2 -18.7
鐵氟龍 Flexion/Extension
-100 -80 -60 -40 -20 0 20 40 60 80 100
L3-4 L2-3 L1-2
Intervertebral level
Changes in iROM (%) -0.8
32.2 -18.7
塑鋼 Flexion/Extension
-100 -80 -60 -40 -20 0 20 40 60 80 100
L3-4 L2-3 L1-2
Intervertebral level
Changes in iROM (%) -0.8
34.1 -22.2
塑鋼 Flexion/Extension
-100 -80 -60 -40 -20 0 20 40 60 80 100
L3-4 L2-3 L1-2
Intervertebral level
Changes in iROM (%) -0.8
34.1 -22.2
鋁 Flexion/Extension
-100 -80 -60 -40 -20 0 20 40 60 80 100
L3-4 L2-3 L1-2
Intervertebral level
Changes in iROM (%)
0.7
38 -29.2
鋁 Flexion/Extension
-100 -80 -60 -40 -20 0 20 40 60 80 100
L3-4 L2-3 L1-2
Intervertebral level
Changes in iROM (%)
0.7
38 -29.2
鈦合金 Flexion/Extension
-100 -80 -60 -40 -20 0 20 40 60 80 100
L3-4 L2-3 L1-2
Intervertebral level
Changes in iROM (%) 2.9
39.8 -34.6
鈦合金 Flexion/Extension
-100 -80 -60 -40 -20 0 20 40 60 80 100
L3-4 L2-3 L1-2
Intervertebral level
Changes in iROM (%) 2.9
39.8 -34.6
圖 4- 7 各桿件剛性之 ALE 影響 前彎-後仰:不同剛性下之各節椎骨活動度 (iROM) (角度)
L1-2 L2-3 L3-4
正常的椎骨 11.31±0.22 9.1±0.43 7.44±0.20
椎間盤退化 6.41±0.20* 14.87±0.14* 7.67±0.15
鐵氟龍 11.22±0.25 7.40±0.33* 9.83±0.36*
塑鋼 鋁 鈦合金
11.22±0.22 11.39±0.34 11.64±0.06*
7.08±0.20*
6.45±0.10*
5.95±0.20*
9.97±0.23*
10.27±0.13*
10.40±0.15*
*表示與正常椎骨活動度有顯著性差異(P<0.05)
表 4- 3 各種桿件剛性下之各節椎骨活動度 4-3-2 新型穩定系統的桿件長度對椎骨穩定度的影響
短桿件相對於長桿件在手術當節椎骨有較佳的活動度表現(有顯著性差異),但 會增加下鄰近椎骨 L3-4 的活動度(增加 45.4%)。長桿件會使上鄰近節椎骨(L1-2) 有較大之活動度變化(增加 10.9%)。(圖 4-6、圖 4-7、表 4-3)
圖 4- 8 桿件長度對椎骨活動度實驗結果
Long Flexion/Extension
-100 -80 -60 -40 -20 0 20 40 60 80 100
L3-4 L2-3 L1-2
Intervertebral level
Changes in iROM (%) 10.9
36.1 -45.9
Long Flexion/Extension
-100 -80 -60 -40 -20 0 20 40 60 80 100
L3-4 L2-3 L1-2
Intervertebral level
Changes in iROM (%) 10.9
36.1 -45.9
Short Flexion/Extension
-100 -80 -60 -40 -20 0 20 40 60 80 100
L3-4 L2-3 L1-2
Intervertebral level
Changes in iROM (%) -0.1
45.4 -34.6
Short Flexion/Extension
-100 -80 -60 -40 -20 0 20 40 60 80 100
L3-4 L2-3 L1-2
Intervertebral level
Changes in iROM (%) -0.1
45.4 -34.6
圖 4- 9 桿件長度對 ALE 之影響 前彎-後仰:不同長度下之各節椎骨活動度 (iROM) (角度)
L1-2 L2-3 L3-4
正常的椎骨 11.31±0.22 9.1±0.43 7.44±0.20
椎間盤退化 6.41±0.20* 14.87±0.14* 7.67±0.15
短間距 11.3±0.25 5.95±0.25* 10.81±0.30*
長間距 12.55±0.18* 4.93±0.21* 10.12±0.06*
*表示與正常椎骨活動度有顯著性差異(P<0.05)
第五章 討論
5-1 混成法測試機台
脊椎融合術可能造成鄰近椎節退化,改變椎骨的生物力學表現;而動態穩定 系統的設計即是希望減緩或消除傳統式穩定系統的副作用。目前已有許多針對穩 定系統的離體研究,但在測試方法及結論差異大,甚至互相矛盾。目前測試脊椎 穩定度的兩種方法為:撓度測試與剛性測試。撓度測試主要是對試樣施予不受拘 束的固定純彎矩,觀察其角度位移變化。施予純彎矩的特性是能讓整副試樣皆受 到相同的負載,然而並無法有效探討各別鄰椎骨的活動度變化。剛性測試為輸入 角度位移量,量測試樣所受到的力量及力矩值並建立兩者的關係。當我們要對試 樣作角度位移控制時,必須先定義旋轉軸,然而生物椎體的自然旋轉軸(nature axis of rotation)位置無法在實驗前得知,且會隨著試樣的變形而改變。例如:本實驗 的試樣裝上穩定系統後,椎骨的狀態被改變,生物椎體的自然旋轉軸也隨之改變。
基於這些原因,剛性測試很少使用到。
Panjabi 在 2002 年提出的混合測試法,結合撓度與剛性測試的實驗概念,先對 未做處置的脊柱做撓度測試,了解待測試樣在特定彎矩負載下的總活動度及各節 椎骨的活動度。對待測試樣進行處置後,使試樣彎屈至的總角度位移量與未受處 置前相同,進而比較各節椎骨的角度變化。此方法是目前唯一完整定義探討鄰近 椎節角度變化的測試方法。
混成法測試機台的扭力輸出極限為 16Nm,有效包含目前研究生物力學實驗中 常用的 10Nm 負載19。角度量測方面,測試機台的最佳角度量測範圍為±80 度,有 效包含臨床及生物力學實驗中量測到的腰椎活動度(約為 46 度)18。
5-2 傷害模擬
以往在活體 (in vivo)研究中,所使用的退化椎間盤模型,包括穿刺模型 (stab model) 24,椎間環傷害模型 (annular tear model) 14,椎間盤內注射模型 (disc injection,包括注射酵素 3或是氮氣 17),和施以連續性的屈曲-伸展或是軸向負載 的疲勞破壞模型 (fatigue model) 6。然而上述方法成本都相當高、花費時間長、執 行上也較為困難。本實驗退化椎間盤模型設計只想顯著表現出在不穩定椎骨與正 常椎骨活動度上的變化差距,故選擇操作方法較容易且效益高的椎間環傷害模型。
5-3 PDS 系統與 Dynesys 比較
Dynesys 對能有效重建受傷椎節的穩定度,使其回復至與正常椎節差不多的活 動度(增加 1.26 度),但會使下鄰近椎節 L3-4 的活動度顯著增加(增加 3.42 度),
顯然也有加速下鄰近椎節退化的風險。回顧 Wilke 在 2003 年對植入 Dynesys 的多 節脊椎運動元使用撓度測試,發現 Dynesys 能恢復退化椎節的穩定度(減少 4.2 度),
但又能容許該椎節有少許的活動度,而且不會影響鄰近椎節的活動度25。該實驗與 本實驗在鄰近節椎骨活動度的量測上有所差異,推測是僅對多節脊椎運動元做撓 度測試的缺點。
PDS 系統無法有效重建受傷椎節的穩定度,與 Dynesys 相較下,穩定效果明 顯較差。在鄰近椎節的表現上,兩者都有造成下鄰近椎骨退化的風險,但在下鄰 近椎骨 L3-4 出現的活動度代償現象較 Dynesys 少。
5-4 影響穩定系統設計的參數 5-4-1 桿件剛性對穩定度的定量
由實驗結果可推斷出,穩定系統結構的剛性約落在 368~2118 N/mm 之間,即 可對不穩定椎節提供足夠的穩定度。近來逐漸被使用的醫療級 polyetheretherketone
(PEEK),剛性約 840 N/mm 落於區間內,可做為臨床材料設計時的參考。目前脊 椎融合術使用的支撐桿件多以不鏽鋼金屬或鈦合金製造,因此本實驗在作材料剛 性挑選時,特別放入鈦合金材料。實驗結果顯示,手術節的穩定度會隨著桿件剛 性提高而增加,但並非呈線性變化;挑選高剛性結構雖然能大幅增加不穩定椎節 的穩定度,但卻可能引發鄰近椎骨過度代償,加速鄰近椎骨退化12,18,19。
5-4-2 桿件長度對穩定度的影響
臨床上,外科醫師在脊椎手術中並不會特別考慮桿件長度對椎骨穩定度的影
響,在實驗設計中,我們認為桿件長度會顯著性影響手術節椎骨的穩定度,因此 定義兩種不同長度的桿件,探討其對椎骨活動度的影響。實驗結果也如預期,桿 件長度會顯著性的影響手術椎節的穩定度,短桿件可提供的穩定度較佳,但上鄰 近椎節確有活動度增加的疑慮。
5-5 實驗限制
(1)樣本數不足。由於人的屍體(cadaver)試樣昂貴且腰椎取得不易,在此階段 仍屬開發與了解穩定系統中各參數對椎骨活動度的影響,因此不做多副腰椎 測試。
(2)本實驗視做傷害模擬前的椎節為正常的椎節,並以此為比較基準;然而,本 實驗用的試樣是老年人的椎骨,椎節本身即存在「退化」的因素,可能影響 對實驗結果的判斷。
參考文獻
1. http://www.naw1.com/organic/waist.htm.
2. http://www.vision.caltech.edu.
3. Antoniou J, Mwale F, Demers CN, et al. Quantitative magnetic resonance imaging of enzymatically induced degradation of the nucleus pulposus of intervertebral discs.
Spine 2006;31:1547-54.
4. Axelsson P, Johnsson R, Stromqvist B. The spondylolytic vertebra and its adjacent segment. Mobility measured before and after posterolateral fusion. Spine
1997;22:414-7.
5. Bothmann M, Kast E, Boldt GJ, et al. Dynesys fixation for lumbar spine degeneration. Neurosurg Rev 2008;31:189-96.
6. Callaghan JP, McGill SM. Intervertebral disc herniation: studies on a porcine model exposed to highly repetitive flexion/extension motion with compressive force.
Clin Biomech (Bristol, Avon) 2001;16:28-37.
7. Chen PJ. Effect of cervical muscle dysfunction on the spine stability. 2007.
8. Freudiger S, Dubois G, Lorrain M. Dynamic neutralisation of the lumbar spine confirmed on a new lumbar spine simulator in vitro. Arch Orthop Trauma Surg 1999;119:127-32.
9. Frymoyer JW, Hanley EN, Jr., Howe J, et al. A comparison of radiographic findings in fusion and nonfusion patients ten or more years following lumbar disc surgery. Spine 1979;4:435-40.
10. Goffin J, Geusens E, Vantomme N, et al. Long-term follow-up after interbody fusion of the cervical spine. J Spinal Disord Tech 2004;17:79-85.
11. Grob D, Benini A, Junge A, et al. Clinical experience with the Dynesys semirigid fixation system for the lumbar spine: surgical and patient-oriented outcome in 50 cases after an average of 2 years. Spine 2005;30:324-31.
12. Lee CK. Accelerated degeneration of the segment adjacent to a lumbar fusion.
Spine 1988;13:375-7.
13. Mulholland RC, Sengupta DK. Rationale, principles and experimental evaluation of the concept of soft stabilization. Eur Spine J 2002;11 Suppl 2:S198-205.
14. Natarajan RN, Andersson GB, Patwardhan AG, et al. Effect of annular incision type on the change in biomechanical properties in a herniated lumbar intervertebral disc.
J Biomech Eng 2002;124:229-36.
15. Nockels RP. Dynamic stabilization in the surgical management of painful lumbar spinal disorders. Spine 2005;30:S68-72.
16. Nordin M FV. Basic Biomechanics of The Musculoskeletal Systemed. 2003.
17. Oliphant D, Frayne R, Kawchuk G. A new method of creating intervertebral disc disruption of various grades. Clin Biomech (Bristol, Avon) 2006;21:21-5.
18. Panjabi M, Henderson G, Abjornson C, et al. Multidirectional testing of one- and two-level ProDisc-L versus simulated fusions. Spine 2007;32:1311-9.
19. Panjabi M, Malcolmson G, Teng E, et al. Hybrid testing of lumbar CHARITE discs versus fusions. Spine 2007;32:959-66; discussion 67.
20. Panjabi MM. Clinical spinal instability and low back pain. J Electromyogr Kinesiol 2003;13:371-9.
21. Panjabi MM. Hybrid multidirectional test method to evaluate spinal adjacent-level effects. Clin Biomech (Bristol, Avon) 2007;22:257-65.
22. Panjabi MM, Goel VK, Takata K. Physiologic strains in the lumbar spinal
ligaments. An in vitro biomechanical study 1981 Volvo Award in Biomechanics. Spine
23. Rohlmann A, Burra NK, Zander T, et al. Comparison of the effects of bilateral posterior dynamic and rigid fixation devices on the loads in the lumbar spine: a finite element analysis. Eur Spine J 2007;16:1223-31.
24. Rousseau MA, Ulrich JA, Bass EC, et al. Stab incision for inducing intervertebral disc degeneration in the rat. Spine 2007;32:17-24.
25. Schmoelz W, Huber JF, Nydegger T, et al. Dynamic stabilization of the lumbar spine and its effects on adjacent segments: an in vitro experiment. J Spinal Disord Tech 2003;16:418-23.
附錄 A CCD 錄影程式碼
附錄 B 扭矩控制程式碼
附錄 C 角度位移控制程式碼