Volume 20, No.4, 2016, pp. 231-250 DOI:10.6574/JPRS.2016.20(4).1
1 國立屏東科技大學生物資源研究所 博士 收到日期:民國 104 年 02 月 09 日
2 國立屏東科技大學森林系 教授 修改日期:民國 105 年 01 月 29 日
* 通訊作者, E-mail: cct @gisfore.npust.edu.tw 接受日期:民國 105 年 03 月 23 日
光達技術應用於人工林之經營與監測
魏浚紘
1陳朝圳
2*本研究利用地面光達探討如何以非破壞性方式,調查及監測森林樣區之立木三度空間資訊,及如何 應用光達系統所量測之資訊應用於人工林經營。以自動化方式獲取疏伐作業所需之林分性態值資料,包 括樹高、胸高直徑、樹冠高、立木位置圖等資料,並評估地面光達於人工林測計之可行性。結果顯示,
透過地面光達系統確實可正確獲得立木資訊,對於永久監測樣區而言,以光達系統之不同拍攝位置,可 消除掃瞄的遮蔽效應,藉由高密度的點雲資料,可直接測量立木樹高與不同樹幹位置之直徑,而單位體 積之點雲資料量不同,會影響立木直徑推估之結果。而地面光達所獲得之樹高與樹徑之 3D 資料,可進行 非破壞性之區分材積估算,並建立立木材積式。光達點雲資料之空間分布,所推估之樹冠高程模型,以 樹冠高度之灰階值統計,藉由二值法所訂之閥值,可將林木與地表背景分離,獲取林冠孔隙之平面及垂 直資料,此一林冠孔隙資訊可供為孔隙動態監測研究。地面光達所建立之林木測計、立木競爭指標、林 冠孔隙及與疏伐監測資訊,可更準確的量化疏伐效益及增加林木狀態變化之資訊,對於人工林經營可提 高森林資源調查效率,及擴充森林資源監測資訊。
關鍵詞:森林經營、疏伐作業、地面光達、三維雷射掃瞄、林分性態
1. 前言
全球利用天然林生產木材已日益減少,木材生 產朝向以人工林為主,而集約的人工林經營必須以 撫育技術與疏伐作業,來達成林木生產的目標。傳 統疏伐作業,係根據人工林之經營目標,進行林分 密度管理,以達成疏伐效益,並透過林分之定性與 定量兩種方式,訂定疏伐木選定之位置與數量的作 業準則,篩選出符合生產目的的留存木,但現地作 業時,常因疏伐木之選定無法即時量化,因此很難 控制疏伐強度,故僅能以單位面積株數、胸高斷面 積或蓄積量為標準,來表示疏伐強度,而疏伐效益 之監測,則須由疏伐試驗,以長時間定期的樣區資 料收集分析,才能研判不同疏伐強度對林木生長的 影響(Emmingham and Elwood, 2010)。
而如何準確有效率的收集疏伐監測樣區之立 木生長資料,為疏伐效益評估的基礎,傳統森林測 計必須利用直徑尺、測高器,進行立木生長資料的
測計(Measurement),而準確的立木材積推估,則必 須藉由伐倒標準樣木,以樹幹解析(Stem analysis) 取得林木的材積及生長量,此種傳統的森林測計方 法,必須進行破壞性的立木伐倒,費時費力,或因 測計儀器本身之量測精度,其量測誤差高於林木短 時間內的生長量,因此無法準確的顯示林木疏伐的 生長效益。近年來由於光達系統(Light Detection and Ranging, LiDAR)的發展,其對於單株林木的測 計,及大面積森林蓄積量調查,帶來新的量測模式 (Maltamo et al., 2004;魏浚紘、等,2010)。地面光 達在森林測計上,可具有較高精度的單木測計準確 度(Omasa et al., 2002; Urano and Omasa, 2003),亦 可用於樹冠動態變化監測(Hosoi and Omasa, 2006;
魏浚紘、等,2012)與立木位置及林木競爭(魏浚紘、
等 ,2013; Sanz et al., 2013)等。地面光達高精度的 測量技術亦用於樹幹測量,透過實際測量的結果與 地面光達所萃取到的資料相較之下,其結果與均方 根誤差範圍約為 1.5 cm 至 3.3 cm(Hopkinson et al.,
2004)。除上述應用外,國外已發展出應用光達點 雲資料,進行森林生態系永續經營的應用,如應用 地面光達永久記載林木結構,透過其參數測量森林 立木結構(Hopkinson et al., 2004);單木葉子面積密 度的推估(Hosoi and Omasa, 2007);測量林木冠層 以及孔隙分布(Danson et al., 2007);利用地面光達,
重建樹幹與枝條(Pfeifer et al., 2004;Cheng et al., 2007;Côté et al., 2009)等。
因地面光達系統可獲得細緻的地物三維資訊,
本研究試圖利用三維雷射掃瞄系統(三維雷射掃瞄 儀 3D Laser Scanner),亦稱光達系統,配合傳統地 面調查資料,發展自動化處理光達點雲資料技術;
以地面光達進行單木或林分的測計調查,探討其調 查精度是否可準確的掌握疏伐前後之林木生長資 訊;並討論如何以光達系統應用於人工林疏伐監測 資訊的取得,提升疏伐作業效益之量化評估效能。
2. 材料與方法
2.1 研究區位置
針葉樹試驗樣區位於屏東林管處荖濃溪事業 區六龜工作站,小關山林道之紅檜(Chamaecyparis formosensis Matsum)人工林疏伐樣區。闊葉林試驗 樣區,位於屏東老埤農場之臺糖平地造林地之大葉 桃 花 心 木 (Swietenia macrophylla King) 、 白 楊 (Populus davidiana Dode) 、 白 雞 油 (Fraxinus griffithii C. B. Clarke) 、 櫸 (Zelkova serrata (Thunb.) Makino)人工純林及大葉 桃花心木與台灣欒樹(Koelreuteria henryi Dummer) 人工混淆林,如圖 1 所示。
圖 1 研究區位置圖
2.2 研究材料
2.2.1 地面光達點雲資料
本研究以高精度、高解析度之 Trimble GS 200 系列地面光達為資料收集工具,以地面控制點進行 林木光達點雲的掃瞄。每個樣區至少設置 6 個均勻 分布在掃瞄範圍內的共軛點,以供點雲資料的接 合 ,並以均方根誤差(Root Mean Squared Error, RMSE)控制林木位置誤差在 5 cm 以下。
由於 CCD 所拍攝原始影像之點雲染色為二維 資料,因此必須藉由共線式如式(1)、式(2)轉換成 三維座標(趙鍵哲、彭念豪,2005),計算方式係以 點雲之(X, Y, Z)為內外方位參數,將點雲對應於影 像上形成點雲的染色;重建完成的彩色三維點雲資 料,可供為量測物體的剖面測量、體積與高度測量 等。
...(1)
{
𝑋𝐿= 𝑝 + 𝑧 × 𝑎 𝑌𝐿= 𝑞 + 𝑧 × 𝑏
𝑍𝐿= 𝑧 ………..…………(2)
其中,X0, Y0, Z0與 XL, YL, ZL為空間直線上兩點,dX, dY, dZ 為方向向量,a, b, p, q 為三維直線參數,t, z 為三維直線上之變數。
2.2.2 試驗樹種樣區概況
針葉樹種以六龜地區小關山林道之紅檜疏伐 人工林為對象,地面光達之掃瞄樣區為 20 m×30 m ,共選定兩個樣區,兩樣區相鄰約 10 m,此處 均有撫育作業,地表適合架設地面光達,共進行三 次掃瞄分別為疏伐前(2009 年)、疏伐後當年(2009 年)、疏伐後四年(2013 年)。
闊葉樹種以大葉桃花心木、白雞油、櫸、白楊 與台灣欒樹人工林為對象,大葉桃花心木試驗地之 栽植距離為 2.2 m×3.3 m,其試驗面積為 0.825 ha,
1
0 0
0 0
b a z q p dZ dY dX t Z Y X Z Y X
L L L
合計 77 株林木,分別於 2010 年、2011 年與 2013 年三個不同時期進行地面光達掃瞄。白楊試驗樣區 其試驗樣區面積為 0.5 ha,每 3 週進行林木樹高、
胸徑、地徑與存活率調查,地面光達共掃瞄兩次,
間隔時間為 3 週。闊葉樹種混植之試驗研究樣區,
其栽植方式為四行,分別為大葉大葉桃花心木兩行 內側(15 株),台灣欒樹兩行外側(14 株,部分林木 有雙岔或三岔),樣區大小為 31 m×20 m 栽植距離 為 4.8 m×4.9 m,於 2010 年與 2013 年進行地面光 達掃瞄。
2.3 研究方法
地面樣木之胸徑量測真值係以有效數字一位 之直徑尺,於林木 1.3 m 位置進行測量,樹高則以 有效數字一位之測高器,進行樹高量測,樹高為樹 頂至地表之高度。
2.3.1 光達點雲資料推估胸徑之準 確性評估
將立木點雲資料,以 0.1 m×0.1 m 之運算視窗 尋範圍內之高程最低點的點雲,視為地面點,以地 面高度為基準(0 m),向上延伸 1.3 m 切取光達點雲 厚度 10 cm 的橫切面,供為量測立木之胸徑,為探 討如何以光達點雲資料量測胸徑,本研究提出最大 外切圓擬合法與鄰近點相連法之兩種電腦自動化 處理方法,透過兩種自動擬合演算法與直接測量 法 ,進行胸高直徑量測,並以 F 檢定探討地面光 達量測林木胸徑與實地量測胸徑之差異性,以評估 地面光達量測林木胸徑之準確度。
2.3.1.1 直接測量法
利用上述所切取離地 1.3 m 處之光達點雲橫切 面,並以輪尺測計原理,以目視方式直接測量圓盤 直徑。
2.3.1.2 以點雲資料利用演算法自動量測 立木胸徑
2.3.1.2.1 最大外切圓擬合法
已知的各項座標值(X, Y),求空間中未知三點 a1、a2、a3 座標,以線性代數,分離未知點及已知 點,再用最小平方迴歸法,求出擬合 a1、a2、a3,
擬合圓中心後,再求各點半徑最大值,即可求出最 大外切圓。本研究透過上述概念修正擬合方程式,
以 Taubin (1991)所發展出之運算法,進行點雲資料 之最大外切圓,擬合林木圓盤周緣求解周長,並以 圓周長公式推估直徑如式(3)。
2.3.1.2.2 鄰近點相連法
以圓盤上任一點 a,進行環域分析(Buffer),以 不斷擴張方式,當環域範圍碰到第一點 b,即連接 ab 兩點,接續進行 b 點環域分析,以不可逆向連 接方式,尋找下一個更接近之點位,直到封閉為止。
透過封閉線段長(周長)以圓周長公式推估直徑如 式(3)。
R=P/π ………(3)
其中, P 為周長,π、R 各為圓周率及直徑。
由於在測量立木胸徑,影響最大的變數,為點 雲密度與點雲分布形式,故本研究以 30 株點雲密 度最高,且點雲平均分布之點雲比例 100%樣木,
並將胸徑範圍分成 0-10 cm 與 11-20 cm 兩個區間,
分別進行變異數同質性檢定,檢定變異數是否相 同 , 若 相 同 則 以 單 因 子 變 異 數 分 析 (One-way ANOVA)與 Tukey 法,進行事後檢定,若檢定後變 異數不相等,則以 Brown-Forsythe 未假設變異數相 同進行分析,後續檢定則以Dunnett’s T3 檢定,探 討三種不同演算法,對立木胸徑量測準確度的差異 性。另為探討地面光達掃瞄之遮蔽效應,對立木胸 徑量測的影響,以遮蔽概念分別將點雲密度依比例 減少 50%以及減少 75%後,再進行立木胸徑的量 測,並檢測其對胸徑擬合量測的準確度。
2.3.2 應用地面光達測計不同形態 人工林的立木胸徑與樹高
以紅檜人工純林、大葉桃花心木人工純林及白 楊人工純林及台灣欒樹與大葉桃花心木人工混淆 林,四種不同人工林狀態為研究試驗樣區,以現地 量測及利用光達掃瞄樣區之立木樹高、胸徑,以相 關分析探討實測值與光達測量值兩者間差異性,討 論不同樹種對於地面光達測計立木胸徑、樹高時所 造成的影響。
2.3.3 以光達掃瞄資料量測人工林 之立木材積
於針葉樹人工林樣區中選取 11 株紅檜標準 木 ,在闊葉樹之大葉桃花心木、白雞油、櫸人工 林各選取 10 株標準木,先以地面光達進行立木掃 瞄,以非破壞性量測法,及利用破壞性之伐倒方式,
由 1.3 m 為基準,每 2 m 為單位分段量測圓盤直徑 與樹高,並以區分求積法(Sectional measurement) 如式(4)與式(5),獲得立木地面光達量測材積與伐 倒木之實測材積(楊榮啟、林文亮,2003),以平均
偏差=
i i i
V V V
,評估地面光達對於立木材積量測 之可行性。
V=(gi+gi+1)/2×Li ………(4)
Vt=1/3×gn×Ln………...……(5)
其中,V 為段木材積;Vt為梢端材積;gi為第 i 段 之斷面積;gi+1為第 i+1 段之斷面積;Li為第 i 之段 長度;gn為梢端之斷面積;Ln為梢端材積之長度。
2.3.4 以光達點雲資料自動化偵測 林冠孔隙之空間分布與動態 變化
本研究將林冠孔隙定義為調查範圍內林冠高 程模型(Canopy Height Model, CHM),CHM 在分析
前先利用地理圖層將已知為非林地之位置去除;以 疏伐前後地面光達所產生之 CHM,藉由影像處理 並依照二值法(Fu and Mu, 1981;Sahoo et al., 1988;
Horng et al., 2002)定義其門檻值,透過式(6)進行門 檻值快速區分為兩類型。
}
T y) , (x if 0
T y) , (x if { 1 ) ,
(
f y f
x f h
…….………(6)
本研究以紅檜人工林疏伐樣區(40 m × 50 m) 為試驗材料,探討疏伐前、疏伐後當年與疏伐後四 年,地面光達所量測之林冠孔隙分布與現場調查之 孔隙位置進行比對,以檢核孔隙量測之準確度。
2.3.5 應用地面光達進行疏伐作業 模擬與碳吸存推估
本研究以 Bailey (1974)之最大概似法與牛頓 疊 代 法 , 求 解 Weibull 機 率 密 度 函 數 (Weibull Distribution)(式 8),將地面光達所量測之胸徑代入,
並設定最小胸徑(a),求解 b、c 參數,瞭解林分狀 態與疏伐時機。
x a bc
x
f( )1exp / ………...…… (7)
𝐷𝑛+= 𝑀𝑎𝑥
1≤𝑖≤𝑛{𝐹𝑖− 𝐹̂} 𝑖
𝐷𝑛−= 𝑀𝑎𝑥1≤𝑖≤𝑛{𝐹𝑖−1− 𝐹̂}………..(8) 𝑖
𝐷𝑛= 𝑀𝑎𝑥{𝐷𝑛+, 𝐷𝑁−}
D n
2 2 ln 1
………(9)
其中,Dn:臨界值;
:顯著水準;n:林木株數。疏伐前、疏伐後當年與疏伐後四年之胸徑資 料 ,以 Weibull 三介量之機率密度函數,模擬疏 伐前後之徑級分布狀態,以 Kolmogorov-Smirnov
檢定(K-S Test)檢核模擬效果。
以地面光達所建立的紅檜立木材積式,計算各 疏伐階段的林分蓄積量,並以全株碳蓄積公式如式 (10),進行蓄積量與生物量之轉換,並以式(11)計 算地上部碳蓄積量,進行碳蓄積空間分布圖繪製。
以多期樣區掃瞄資料,可進行 CO2蓄積量如式(12) 與式(13)的推估,並依照林齡計算其 C、CO2年吸 存量的變化,如式(14)與式(15)。
Cplant = Vstem × Vwhole/stem ×𝑊𝑉0
𝑔 × Ccon………...(10)
Above_Cplant = Vstem ×𝑊𝑉0
𝑔 × Ccon…………..……...(11)
CO2plant = Vstem × Vwhole/stem ×𝑊𝑉0
𝑔× Ccon × (CO2/C) …..(12)
Above_CO2plant = Vstem ×𝑊𝑉0
𝑔 × Ccon × (CO2/C) ……...(13)
Above_Cplant_year = ﹝Vstem ×𝑊𝑉0
𝑔× Ccon﹞/years ……...(14)
Above_CO2plant_year =
﹝V𝑠𝑡𝑒𝑚 ×𝑊0
𝑉𝑔 × C𝑐𝑜𝑛 × (CO2/C)﹞
𝑦𝑒𝑎𝑟𝑠 ...…(15)
其中,Cplant:單株 C 蓄積量,CO2plant:單株 CO2
蓄積量,Above_Cplant:單株地上部 C 蓄積量,
Above_CO2plant: 單 株 地 上 部 CO2 蓄 積 量 , Above_Cplant_year: 單 株 地 上 部 C 吸 存 量 , Above_CO2plant_year:單株地上部 CO2吸存量,Vstem: 幹材材積,Vwhole/stem:全株材積與幹材材積轉換係 數,W0/Vg:重量與材積轉換係數,本研究依照馬 子斌、等(1992)所建立之紅檜重量與材積轉換係數 (0.333),Ccon:碳含量轉換係數,碳含量轉換係數 則是參考林裕仁、等(2002)所建立係數(0.4864),
CO2/C:二氧化碳與碳轉換係數,CO2分子量為 44,
C 分 子 量 為 12 , years : 林 齡 ( 修 改 自 IPCC http://www.ipcc.ch/index.html)。
3. 結果與討論
3.1 以不同圓周擬合法探討地 面光達對立木胸徑量測的 準確性
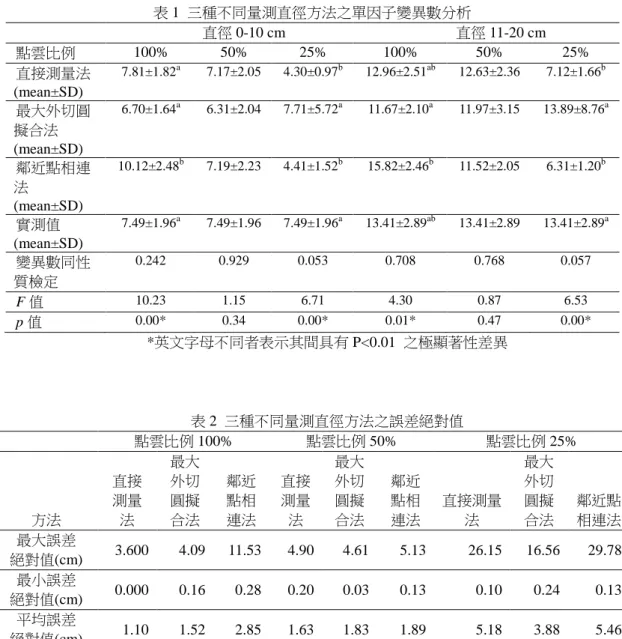
利用 1.3 m 位置不同點雲密度(100%, 50%, 25%)資料,以直接測量法、最大外切圓擬合法及 鄰近點相連法進行量測,並於現地利用直徑尺進行 對應實測以供為地真資料,評估地面光達量測立木 胸徑之準確度,其結果如表 1 所示。由表 1 可知,
在兩種胸徑大小範圍之三種計算方法,對於無遮蔽 圓盤(點雲比例 100%)之胸徑量測具有顯著差異 (P<0.01);對於圓盤僅有 50%點雲密度之胸徑量測,
無顯著差異(P>0.05);對於圓盤僅有 25%點雲密度 之胸徑量測有顯著差異(P<0.01)。由於點雲比例 100%與 25%分別在兩組區間及三種方法間,對圓 盤直徑量測具有顯著差異,故透過 Tukey 法進行測 量測方法間的差異性檢定,結果顯示當點雲密度完 整時,胸徑大小範圍 0-10 cm 及 11-20 cm 之實測值、
直接測量法與最大外切圓擬合法三種量測方法無 顯著差異,但與鄰近點相連法則呈現顯著性差異,
顯示當點雲密度完整時鄰近點相連法,在任何胸徑 大小其量測效果差;而當點雲密度降為 25%時,不 同的胸徑大小範圍,其實測值與最大外切圓擬合法 無顯著差異,而另外兩種量測方法則與實測法,呈 現顯著性差異,顯示當點雲密度低時,以最大外切 圓擬合法可正確的量測立木胸徑,以地面光達量測 立木胸徑之三種量測方法與實測法之誤差絕對值 如表 2 所示。由表 2 可知,點雲密度為 100%以及 50%時,以地面光達量測立木胸徑之三種量測方法 的平均誤差絕對值均小於 3 cm,但當點雲密度降 為 25%時,三種量測方法之平均誤差絕對值均大於 3 cm,顯示當點雲資料不足時,胸徑量測誤差將會 提昇。
表 1 三種不同量測直徑方法之單因子變異數分析
直徑 0-10 cm 直徑 11-20 cm
點雲比例 100% 50% 25% 100% 50% 25%
直接測量法 (mean±SD)
7.81±1.82a 7.17±2.05 4.30±0.97b 12.96±2.51ab 12.63±2.36 7.12±1.66b 最大外切圓
擬合法 (mean±SD)
6.70±1.64a 6.31±2.04 7.71±5.72a 11.67±2.10a 11.97±3.15 13.89±8.76a
鄰近點相連 法
(mean±SD)
10.12±2.48b 7.19±2.23 4.41±1.52b 15.82±2.46b 11.52±2.05 6.31±1.20b
實測值 (mean±SD)
7.49±1.96a 7.49±1.96 7.49±1.96a 13.41±2.89ab 13.41±2.89 13.41±2.89a 變異數同性
質檢定
0.242 0.929 0.053 0.708 0.768 0.057
F 值 10.23 1.15 6.71 4.30 0.87 6.53
p 值 0.00* 0.34 0.00* 0.01* 0.47 0.00*
*英文字母不同者表示其間具有 P<0.01 之極顯著性差異
表 2 三種不同量測直徑方法之誤差絕對值
點雲比例 100% 點雲比例 50% 點雲比例 25%
方法
直接 測量 法
最大 外切 圓擬 合法
鄰近 點相 連法
直接 測量 法
最大 外切 圓擬 合法
鄰近 點相 連法
直接測量 法
最大 外切 圓擬 合法
鄰近點 相連法 最大誤差
絕對值(cm) 3.600 4.09 11.53 4.90 4.61 5.13 26.15 16.56 29.78 最小誤差
絕對值(cm) 0.000 0.16 0.28 0.20 0.03 0.13 0.10 0.24 0.13 平均誤差
絕對值(cm) 1.10 1.52 2.85 1.63 1.83 1.89 5.18 3.88 5.46
試驗結果顯示當點雲資料分布均勻且單位體 積內點雲密度高時,地面光達量測立木胸徑,各種 方法無顯著性差異,顯示高密度的點雲資料,無論 使用何種量測方式均接近真值,其研究結果與 Bucksch et al.(2009)的試驗結果一致,所有有關地 面光達對於立木胸徑測計準確度的影響(Watt and Donoghue, 2005; Moskal and Zheng, 2012),皆認為 地面光達掃瞄的遮蔽效應(Occlusion effect),是造 成立木胸徑量測準確度下降的主要因素,但對於不
同的立木圓周擬合方法,是否造成立木胸徑量測準 確度的影響,其研究較少,本研究試驗發現最大外 切圓擬合法量測時,當點雲密度完整其平均誤差絕 對值為 1.52 cm,而當點雲不足時其平均誤差絕對 值為 1.83 cm,其誤差變異不大,所量測的胸徑值 與實測值最為接近,但當點雲密度由 100%降為 50%及 25%時,胸徑量測之準確亦會隨之下降如圖 2。
註:X 軸為 X 座標,Y 軸為 Y 座標(相對座標),單位 m
圖 2 以最大外切圓擬合法量測五株不同光達點雲密度下之立木直徑
圖 3 點雲數量下降時鄰近點相連法造成扇形角加大而影響直徑量測的誤差量
0 50 100 150 200 250 300 350 400
0 1 2 3 4 5 6 7
直徑(cm) 未遮蔽角度(o )
100
%
50
%
25
%
而另外兩種方法則有明顯低估現象,其主要原 因在於點雲數量不足時,直接測量法會因人為判斷 的錯誤而低估;鄰近點相連法則因以弧長與最外側 兩點距離,進行周長計算,而餘弦定律透過兩邊與 一夾角,可求第三邊長度如式(16),本試驗依據此 概念修正公式如式(17),依據(17)計算如點雲密度 完整時,若胸徑為 15 cm 其周長為 15π cm,若點 雲密度降為 50%時,則周長變為(7.5π+15) cm,若 點雲密度再降為 25%時,則周長為 7.5(
2
+π/2) cm,由此可知,當點雲數量越少時,造成扇形角 度縮小,量測直徑的誤差越大呈現對數下降趨勢,如圖 3 所示。
) cos(
2 2
2
2
a b
ab c
……….………(16) 其中,c 為 γ 角的對邊,a 與 b 為 γ 角的鄰邊。p = 2π360𝜃 + √𝑎2+ 𝑏2− 2𝑎𝑏cos(360 − 𝜃)…...(17)
其中,p 為周長,θ 為扇形角度。
3.2 以地面光達測計不同型態 人工林的立木胸徑與樹高
為探討地面光達對不同型態人工林之立木胸 徑與樹高的可行性,本研究以上節所發展的最大外 切圓擬合法,測計針葉樹的紅檜人工純林、闊葉樹 的大葉桃花心木人工純林、白楊人工純林及大葉桃 花心木與台灣欒樹混淆林之樣區立木胸徑與樹高,
並以併對相關性分析,檢測地面光達資料所測計之 樣區立木胸徑、樹高與實測的立木胸徑與樹高的相 關性,分析結果如圖 4,由圖 4 可知地面光達對於 立木胸徑的量測實測值具有顯著性相關,除大葉桃 花心木與台灣欒樹混淆林之值 R2為 0.87,其它人 工純林之 R2皆高於 0.96,而樹高測計方面其相關 性較胸徑量測為低,其 R2在 0.83~0.91 之間。
圖 4 地面光達測計不同型態人工林胸高直徑及樹 高與實測值之相關性
各不同型態人工林之地面光達測計立木胸徑 及樹高值與實測值之 1:1 之相關分析,如圖 5 至圖 8,由圖 5 至圖 8 可知樹高量測會因樹冠形態的不 同,影響樹梢頂點的判釋,因此光達量測值與實測 值差異變化較大,此為人為判釋誤差,如能增加樹 冠的點雲密度,則可增加樹冠頂點的判釋準確性 (Moorthy et al., 2010)。而胸徑的量測誤差來源,主 要為林木與林木間的自我遮蔽,若增加測站數及增 加點雲掃瞄密度,皆可降低遮蔽效應,並減少胸徑 量測誤差。
圖 5 紅檜人工純林之光達點雲量測胸徑與樹高與 實測值之比較
0.97 0.96 0.96
0.87
0.86 0.86 0.91
0.83
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
紅檜人工純林
桃花心木人工純林
白楊人工純林
桃花心木與台灣欒樹人工混淆林
R2 胸徑
樹高
y = 0.893x + 0.8071 R2 = 0.864 - - - 1:1 0
5 10 15 20
0 5 10 15 20
光達估測樹高(m)
實測樹高(m)
y = 0.9842x + 2.7858 R2 = 0.969 - - - 1:1 0
10 20 30 40 50 60 70 80
0 10 20 30 40 50 60 70 80
光達估測胸徑(cm)
實測胸徑(cm)
圖 6 大葉桃花心木人工純林之光達點雲量測胸徑 與樹高與實測值之比較
圖 7 白楊人工純林之光達點雲量測胸徑與樹高與 實測值之比較
圖 8 大葉桃花心木、台灣欒樹人工混淆林之光達點 雲量測胸徑與樹高與實測值之比較
前人研究顯示如地面光達資料能與空載或衛 載光達結合,則可增加林木點雲資料的完整性,進 而 增 加 立 木 測 計 的 準 確 性 (Leeuwen and Nieuwenhuis, 2010; Yao et al., 2011)。地面光達掃瞄 時,需注意拍攝距離之問題,距離樣木越近且拍攝 角度越小,則無法掃瞄到較高處之樹冠,進而影響 立木高度的量測,而造成量測低估的誤差(Palleja et al., 2010)。地面光達藉由雷射光至物體表面再反射 回來,以其計算距離獲得空間座標,但林木樹冠間 相互遮蔽,導致掃瞄立木於較遠處易受到前面立木 遮蔽,無法獲得足夠點雲資料,本研究之樹高測量,
受遮蔽效應的影響,造成光達量測樹高時有低估現 象。而當林分樹種組成複雜時,因不同樹種之生長 速度及樹冠形態有所不同,會造成樹冠相互重疊、
或因樹幹生長傾斜、地表植生狀態及地形變化等,
皆會影響樹高量測的準確性(陳永寬、等,2005),
而魏浚紘、等(2013)亦指出以光達量測樹高和胸直 均具有高度相關性,但同樣會有樹冠重疊等問題,
另外坡度傾斜亦會造成準確度下降,但光達資料與
y = 0.9946x + 0.6997 R2 = 0.860 - - - 1:1 0
2 4 6 8 10 12 14 16 18
0 2 4 6 8 10 12 14 16 18
光達估測樹高(m)
實測樹高(m)
y = 0.9414x + 0.8775 R2 = 0.956 - - - 1:1 0
2 4 6 8 10 12 14 16 18 20
0 2 4 6 8 10 12 14 16 18 20
光達估測胸徑(cm)
實測胸徑(cm)
y = 0.9117x + 0.2442 R2 = 0.909 - - - 1:1 0
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0 1 2 3 4 5
光達估測樹高(m)
實測樹高(m)
y = 1.0582x - 0.0665 R2 = 0.957 - - - 1:1 0
0.5 1 1.5 2 2.5 3
0 0.5 1 1.5 2 2.5 3
光達估測胸徑(cm)
實測胸徑(cm)
y = 0.9628x + 0.7511 R2 = 0.828 - - - 1:1 0
2 4 6 8 10 12 14 16 18 20
0 5 10 15 20
光達估測樹高(m)
實測樹高(m)
y = 0.9986x - 1.8615 R2 = 0.873 - - - 1:1 0
5 10 15 20 25 30 35 40 45
0 10 20 30 40 50
光達估測胸徑(cm)
實測胸徑(cm)
實際調查資料依然會呈現直線相關;Moorthy et al.
(2010)亦認為地面光達應用於複雜森林獲取資料,
包括林下植被複雜或樹冠重疊,會造成樹種混淆及 相互遮蔽等問題,使光達量測的準確性下降。除上 述前人研究所論之造成地面光達量測誤差問題之 外,由於地面光達之林木三維點雲資料量測,係依 據雷射光至林木表面位置所獲得,故風所造成的林 木晃動,會使所獲取的點雲資料產生誤差,造成立 木量測的誤差,此為進行樣區林木地面光達掃瞄作 業時必須注意的要項。
3.3 以地面光達量測人工林的 立木材積
為探討地面光達的立木掃瞄資料,是否能以非 破壞性方式,代替傳統以樣木砍伐方式建立立木材 積推估模式,以紅檜、大葉桃花心木、台灣櫸及白 雞油等四種台灣重要造林樹種,選取不同徑級之樣 木,每一樹種 10-11 株,砍伐前先以地面光達進行 全株點雲資料的掃瞄,砍伐後之樣木進行傳統式區 分求積法,計算單木材積視為實測材積。單木全株 掃瞄之點雲資料,先濾除枝葉之點雲資料後,以區 分求積法求算立木材積,以平均偏差評估地面光達 量測立木材積的可行性,其結果如表 3 所示。由表 3 可知樹幹通直之立木如紅檜及大葉桃花心木,其 量測準確度(平均偏差 7%~9%)高於樹幹彎曲分叉 之立木如台灣櫸、白雞油(平均偏差為 11%)。
表 3 地面光達點雲資料量測立木材積之可行性評 估
Hopkinson et al. (2004) 曾利用地面光達量測 加拿大多倫多北部的紅松(Pinus resinosa Ait.)人工 林及糖楓(Acer saccharum Marsh.)混淆林之立木材
積,結果顯示兩種不同形態的林分,地面光達量測 之林分蓄積量與實測蓄積量之誤差皆在 7%以內,
顯示地面光達對於林木材積量測確實有其可行性;
Polo et al. (2009)則利用拖拉機式的雷射掃瞄光達,
進行果園果樹的掃瞄作業,同樣以非破壞性的方 式 ,獲取果樹的材積與葉表面積等資訊,結果顯 示不論是蘋果、梨子或葡萄等果樹,光達所獲得的 量測資訊與破壞性量測所獲取的資訊,且實測材積 與光達材積之相關性 R2達 0.97,顯示光達系統為 高科技、快速且非破壞性的遙測技術,確實可用來 推估植物的材積、葉面積與結構。透過地面光達,
不僅可以提供表面特徵 0.05-10.00 cm 之單株立木 三維空間資料 (Omasa et al., 2002;Urano and Omasa, 2003),更能經多次掃瞄或多個掃瞄器聯合 使用,達到提供詳細地表覆蓋三維空間資訊之目 標 。根據前人研究可知,以地面光達進行林分立 木的測量,不論是生物量、材積或葉表面積均可獲 得準確資訊,透過地面光達建立立木材積式確實可 行,但必須注意拍攝距離的差異所造成之誤差,當 掃瞄距離過遠時則應增加測站由其他角度進行掃 瞄,增加立木之光達點雲數量,以減低量測誤差。
3.4 以地面光達點雲資料自動 化偵測林冠孔隙之空間分 布與動態變化
3.4.1 利用地面光達點雲資料以二 值化技術進行林冠孔隙分類
本研究以 40m × 50 m 之紅檜疏伐樣區為研究 材料,進行疏伐前、疏伐後當年與疏伐後四年之林 冠孔隙(Canopy gap)監測,探討冠層與林冠孔隙位 置、面積大小與動態變化,以地面光達點雲資料,
推估空間解析力 0.5 m × 0.5 m 之 CHM 為材料,計 算林冠高度分布的峰谷位置,作為林冠孔隙判斷之 閥值(Thresholding)如圖 9,由圖 9 可知,疏伐前之 峰谷約為 10.5 m,疏伐後之峰谷約為 9.5 m,以峰 谷 之 林 冠 高 為 閥 值 , 進 行 影 像 二 值 化 (Image binarization),產生孔隙與非孔隙影像,結果如圖 紅檜 大葉桃
花心木 台灣
櫸
白雞油
ViVi 0.753 0.049 0.015 0.025
Vi 8.010 0.689 0.129 0.222平均偏差 0.094 0.070 0.116 0.113
10 所示。雖然利用大尺度的被動式的遙測影像,
進 行 林 冠 孔 隙 分 類 研 究 已 有 豐 碩 成 果 (Negrón-Juárez et al., 2011),但因被動式遙測屬於 二維影像,其對於三維的生態系物體的描述,仍然 具有其侷限性(Lefsky et al., 2002),因光達點雲資
料屬於三維空間資訊之影像,因此在立木樹冠形態 的模擬、林分垂直結構的量化等,皆為傳統被動式 遙測影像所未及(Lefsky et al., 1999; Yang et al., 2015)。
疏伐前 疏伐 4 年後 圖 9 以林冠高度分布之峰谷為影像二值化之閥值
圖 10 疏伐前後及疏伐後四年之林冠孔隙變化 閥值約 10.5 m
閥值約 9.5 m
疏伐前 疏伐後
疏伐前 疏伐後 疏伐四年後
表 4 樹冠與孔隙面積動態變化統計表
疏伐前 疏伐後當年 疏伐後四年
樹冠面積(m2) 585.2(29.3%) 274.7(13.7%) 749.3(37.5%) 孔隙面積(m2) 1414.8(70.7%) 1725.3(86.3%) 1250.7(62.5%) 樹冠面積變化量(m2) -310.4(-15.5%) 474.6(23.7%) 孔隙面積變化量(m2) 310.4(15.5%) -474.6(-23.7%)
年平均樹冠面積變化量(m2 y-1) 118.6(5.9%)
年平均孔隙面積變化量(m2 y-1) -118.6(-5.9%)
3.4.2 樹冠與孔隙空間分布與動態 變化
經影像二值化自動分類後之疏伐樣區之林冠 孔隙變化如表 4,由表 4 可知樣區疏伐前樹冠面積 為 585.2 m2(29.3%),孔隙面積為 1,414.8 m2(70.7%)
;疏伐後樹冠面積為 274.7 m2(13.7%),孔隙面積為 1,725.3 m2(86.3%);疏伐後四年為 749.3 m2 (37.5%)
,孔隙面積為 1,250.7 m2(62.5%),疏伐後樹冠面積 減 少 310.4 m2(15.5%) , 孔 隙 面 積 增 加 310.4 m2(15.5%) ; 疏 伐 後 四 年 樹 冠 面 積 增 加 474.6 m2(23.7%),孔隙面積減少 474.6 m2 (23.7%),平均 每一年樹冠面積可增加 118.6 m2(5.9%),孔隙面積 減少 118.6 m2 (5.9%)。
樣區之地面光達點雲影像,以影像二值化進行 林冠孔隙分布的量測,並與實地調查的林冠孔隙相 核對,結果顯示樣區中如孔隙中具有較多的入侵雜 木時,會使影像二值化分類時產生誤差,讓孔隙與 非孔隙區域產生混淆現象,而產生誤判,其主要原 因在於樣區經過疏伐後,形成的孔隙因非目標物種 的入侵,造成孔隙中有少數非目標林木或高莖類草 本植物,致使孔隙判斷產生混淆,將來可藉由點雲 的三維資料,計算單位面積之立木株數、平均林分 高等多因子介量,加入孔隙判斷的決策因子,以增 加孔隙量測的準確度,而 Yang et al. (2015)整合二 維的光學遙測影像與三維的 LiDAR 點雲資料,進 行林冠孔隙的量測,結果顯示單獨使用光學遙測影 像及 LiDAR 點雲資料,其分類之準確度分別為 68.54%±9.03% 與 64.51%±11.32%,而整合兩種影 像進行分類時可提升為 80.28%±6.16%,顯然不同 的遙測方式對於孔隙的量測具有互補優缺點的效
力,未來值得嘗試探討。而利用不同時期地面光達 影像,進行林冠孔隙動態監測研究,或以影像二值 化方式,進行林冠孔隙量測,確實可快速獲得孔隙 面積變化情形,其對於快速、大面積取的林冠孔隙 分布資訊、疏伐林分之林冠孔隙監測,及疏伐效益 的評估,有利於提供人工林經營資訊(St-Onge and Vepakomma, 2004; Vepakomma et al., 2008)。
3.5 應用地面光達進行疏伐作 業模擬與碳吸存推估 3.5.1 以 Weibull 機率密度函數進行
疏伐作業模擬
以地面光達所量測之紅檜人工林疏伐樣區之 立木位置及胸徑資料,以三介量之 Weibull 機率密 度函數,進行林分疏伐前後之胸徑分布模擬,結果 如表 5,模擬結果以 Law and Kelton(2000)所提出之 K-S 適合度檢定,疏伐前後其林分理論胸徑分布與 實測值分布的差異性。由表 5 與表 6 可知,本研究 利用 Weibull 機率密度函數模擬疏伐前後之胸徑分 布,以 K-S 適合度檢定通過率達 100%,顯示 Weibull 機率密度函數可有效模擬疏伐前後之胸徑分布。
Bailey and Dell (1973)指出 Weibull 機率密度函數之 參數,可以解釋人工林生長競爭之情況,其中 c 值 決定分布曲線形狀,當 c 值≦1 時,則直徑分布呈 現倒 J 型曲線,極盛相天然林之直徑分布會呈現此 種分布狀態,而一般同齡人工林其 c 值會大於 1,
而當 c 值介於 1 至 3.6 時,分布形態呈現正偏歪 (Positively skewed)分布,當人工林立木間產生生長 競爭時,會出現此種直徑分布狀態;當 c 值等於
3.6 時,呈現常態分布;而當 c 值>3.6 時,呈現負 偏歪(Negatively skewed)分布;b 值為尺度參數,b 值越大表示林分之平均胸徑越大;而 a 值為位置參 數,代表人工林之最小直徑。由表 10 可知,疏伐 前至疏伐後四年其 b 值由 27.7 降為 23.4,b 值在疏 伐後有下降的趨勢,而在疏伐後四年則有上升趨 勢 ,顯示疏伐四年立木胸徑生長已受到生長競爭 的紓解,而有加速生長的趨勢,c 值由 1.99 降為 1.55,在疏伐後四年之 c 值呈現正偏歪分布如圖 11,
而 b 值在疏伐後四年依然小於疏伐前,且 c 值有變 小的趨勢,其現象與強度疏伐有關。理論上經疏伐 作業之樣區能獲得較大的生長空間,故 b 值會隨林
齡增加而變大,因本研究之紅檜人工林疏伐樣區,
其林齡較大,強度疏伐會造成上層立木之伐除,疏 伐四年後其立木生長尚未完全反應生長空間疏開 後之生長潛力,故 b 值變化不明顯。利用地面光達 量測林分立木之點雲資料,因具備三維空間資訊,
不但可量測林分中每株立木的胸徑、樹高,亦可進 行單株立木位置之定位,因此藉由 Weibull 機率密 度函數得參數值,可以建立林分層級不同徑階的胸 高段面積、材積分布(Thomas et al., 2008),並可應 用於人工林疏伐作業的模擬(李久先、陳朝圳,
1990)。
表 5 以統計介量表示各樣區之 Weibull 函數參數 疏伐狀況 Weibull 函數參數統計介量
n a 值 b 值 c 值
疏伐前 46 16.50 27.761 1.986 疏伐後當年 27 20.80 23.054 1.797 疏伐後四年 27 24.40 23.425 1.552
表 6 以 K-S 式合度檢定林分理論徑級分布與實際觀測值之差異 疏伐狀況 nDn值
臨界值為
C
1 通過檢測之百分比
D
nn n D
n疏伐前 0.4635 0.5154
0.819 100%
疏伐後當年 0.4101 0.5746 疏伐後四年 0.5107 0.7031
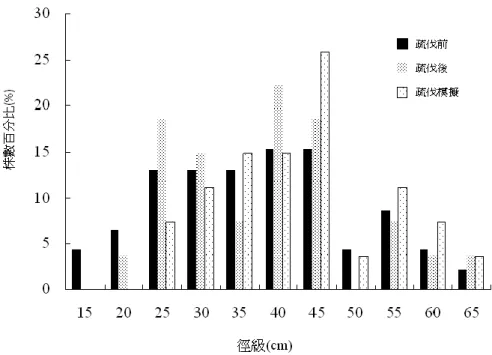
圖 11 紅檜人工林疏伐樣區疏伐前後與疏伐後四年之徑級分布
為探討以地面光達所建立之疏伐樣區之立木 量測資料,如何應用於疏伐作業模擬,本研究以樣 區之疏伐強度(株數保留率為 58.70%),進行疏伐規 劃,調整立木於樣區中具有均勻的生長空間分布,
以樣區中立木相互間距離的變異數大小表達立木 空間分布之狀態,當變異數越小時,表示立木相互 間的距離越均勻。紅檜疏伐樣區實際進行作業其結 果顯示,疏伐前胸高斷面積為 65,395.57 cm2,疏伐 後胸高斷面積為 39,569.09 cm2,立木相互間之距離 變異數為 15.55,如以地面光達量測之立木位置圖 於疏伐前進行疏伐模擬,其疏伐後之胸高斷面積為 47,193.93 cm2,立木相互間之距離變異數為 15.39,
模擬結果確實可降低立木間之距離變異數,使立木 生長空間分布均勻如圖 12 所示,實際疏伐作業之 疏伐前、疏伐後及疏伐模擬之徑級分布如圖 13,
由圖 12 及圖 13 可知,實際疏伐作業所砍伐之林木 徑級較大,故樣區內保留徑級較小之林木,且林木
空間分布較不均勻且緊密,故疏伐後依然產生林木 競爭 (c 值為 1.797),透過疏伐作業模擬,伐採徑 級較小之林木,保留較大徑級之林木,使林木空間 分布較為均勻,可增加保留木生長空間,使其持續 生長,並減少競爭的產生。疏伐作業會因其目的,
而在選木上有所差異,但仍以伐除不良立木以增加 留存木的生長空間為主,由本研究結果證實,藉由 地面光達所獲取之胸徑資料,可推估 Weibull 直徑 分布之參數,確實可模擬疏伐樣區在各生長階段之 直徑分布情形,而傳統上在疏伐木的選擇,大多數 僅依據疏伐強度的指標性資料,進行疏伐作業,其 對於立木空間配置之參考資訊較為薄弱,如疏伐作 業前能以立木位置圖,依據疏伐目的,進行選木規 劃方案的擬訂,藉由疏伐模擬結果,瞭解疏伐後樣 區立木徑級及相互間距離的空間分布,其可確保疏 伐的最佳化效益。
圖 12 紅檜人工林疏伐樣區之實際疏伐作業與模擬疏伐之立木空間分布 實際疏伐
模擬疏伐後
實際疏伐 與模擬疏伐 之比較
樣區 1 樣區 2
圖 13 紅檜人工林疏伐樣區實際疏伐作業與模擬疏伐之徑級分布
3.5.2 以地面光達進行碳吸存推估
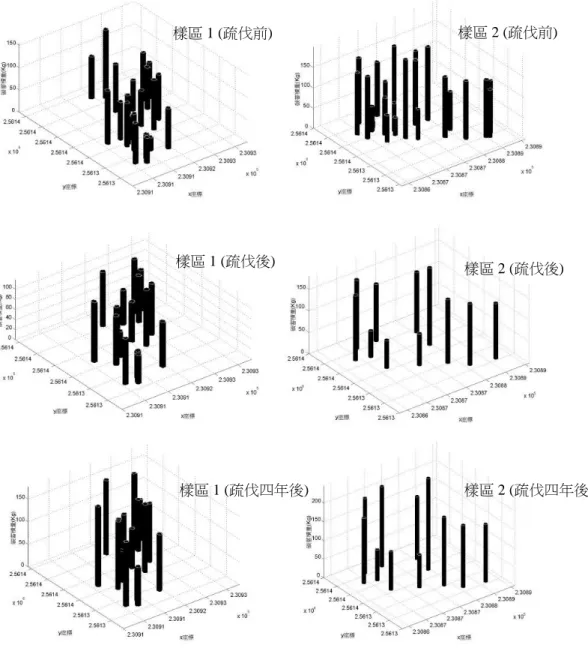
本研究以兩個紅檜人工林疏伐樣區之疏伐前、
疏伐後與疏伐後四年資料,進行樣木空間分布繪 製 ,並進行地上部碳及 CO2蓄積量計算,透過兩 期地面光達之掃瞄資料,計算碳及 CO2吸存量,
其中重量與材積轉換係數與碳含量轉換係數,會因 樹種不同有所差異,故本研究依照馬子斌、等(1992) 所建立之紅檜重量與材積轉換係數(0.333),而碳含 量轉換係數則是參考林裕仁、等(2002)所建立係數 (0.4864)。
疏伐前平均地上部碳蓄積量為 40.00 Mg ha-1, 平均地上部 CO2蓄積量 146.83 Mg ha-1;疏伐後平 均地上部碳蓄積量為 23.08 Mg ha-1,平均地上部 CO2蓄積量 84.58 Mg ha-1;疏伐後四年平均地上部 碳蓄積量為 30.92 Mg ha-1,平均地上部 CO2蓄積量
113.17 Mg ha-1,平均地上部碳吸存量為 1.96 Mg ha-1 y-1,平均地上部 CO2吸存量 7.15 Mg ha-1 y-1。 透過疏伐前與疏伐後之資料相減可獲得疏伐量,疏 伐所獲得之平均地上部碳蓄積量為 16.92 Mg ha-1, 平均地上部 CO2蓄積量 62.25 Mg ha-1。本研究以地 面光達所建立之非破壞性立木材積式,可獲得與實 測值高度相關之材積量,此種非破壞性材積式的建 立,可解決傳統上,推估碳蓄積或碳吸存等相關數 據時,需透過破壞性方式取得材積量的問題。而疏 伐作業後,可透過碳蓄積量分布如圖 14 進行相關 監測,未來可利用地面光達建立重要樹種的地方材 積表,除了可評估該地區之碳吸存效益外,亦可比 較疏伐前後與不同疏伐強度對林木生長情形所帶 來的影響,而疏伐作業對森林碳吸存之效益,可供 為林木經營管理的參考。
圖 14 紅檜人工林疏伐樣區之碳蓄積量分布變化圖
4. 結論與建議
以地面光達掃瞄之點雲資料,利用最大外切圓 擬合法可有效的測量立木胸高直徑,而在林分測計 的使用上,因點雲資料具有三維的空間資訊,可有 效的量測立木高度、不同樹高位置的直徑級立木位 置,不同形態之人工林其量測之準確度有所不同,
而點雲密度的高低及立木是否有掃瞄的遮蔽效應,
是立木量測準確度的主要影響因子。利用地面光達 可以選擇不同徑級的樣木進行掃瞄,立木枝、葉與 主幹之點雲資料,可加以分離,進而以非破壞性方
式,量測區分求積法計算幹材積所需之各樹幹區段 直徑,此種非破壞性的區分求積法,對於建立立木 材積式為一便捷、省力的方法。
而光達影像藉由影像二值化技術,可自動化的 量測林冠孔隙之空間分布,其對於疏伐前後之林冠 疏開及鬱閉,提供有利於監測林冠動態變化之資 訊 ,唯如欲增加孔隙量測之準確度,建議可整合 光達點雲資料與光學遙測,進行孔隙的量測,可有 效增加量測的準確度。
地面光達所建立之樣區立木量測資料,包括立 木位置圖、胸徑、樹高、材積等,如配合相關議題 樣區 1 (疏伐前)
樣區 1 (疏伐後)
樣區 1 (疏伐四年後)
樣區 2 (疏伐前)
樣區 2 (疏伐後)
樣區 2 (疏伐四年後)
之分析,如林分直徑分布之 Weibull 機率密度函數 的模擬,可進行疏伐作業模擬,規劃選木方案,藉 由疏伐模擬結果,瞭解疏伐後樣區立木徑級及相互 間距離的空間分布,可確保疏伐的最佳化效益。如 配合碳儲存及碳吸存的計算,可以表達疏伐作業在 碳吸存議題上之效益,以增加林木經營決策資訊。
致謝
本研究感謝屏東林區管理處與六龜工作站所 提供之資料、國立屏東科技大學地理資訊系統與遙 感探測研究室成員協助、力弘科技股份有限公司技 術支援、財團法人中華扶輪教育基金會與斗六東區 扶輪社林先生忠佑(Uncle Nephro)給予研究上之支 持,得以順利完成,特此誌謝。
參考文獻
李久先,陳朝圳,1990。Weibull 機率函數應用於 人工林疏伐作業之研究 ,中華林學季刊,
23(2):9-15。
林裕仁,劉瓊霦,林俊成,2002。台灣地區主要用 材比重與含碳量測定,台灣林業科學,17(3):
291-299。
馬子斌,陳政靜,熊如珍,黃清吟,陳欣欣,翟思 湧,1992。重要商用木材之一般性質,台灣 省林業試驗所林業叢刊第 1 號,205 頁。
陳永寬,詹進發,葉堃生,鄭祈全,施瑩瑄,2005。
應用地面雷射掃瞄儀測算樹高之研究,航測 及遙測學刊,10(4):327-336。
楊榮啟,林文亮,2003。森林測計學,國立編譯館,
309 頁。
趙鍵哲,彭念豪,2005。以光達資料之控制直線求 解單張像片外方位參數之模式探討與可行性 評估,航測及遙測學刊,10(1):89-102。
魏浚紘,吳守從,彭炳勳,陳朝圳,2010。應用空 載光達建立阿里山地區柳杉人工林之林分材 積式,地理學報,59:67-80。
魏浚紘,吳守從,黃韋傑,謝依達,鍾玉龍,陳朝 圳,2012。影像二值化在空載光達影像林冠
孔隙分類上之應用,地理學報,66:53-66。
魏浚紘,陳朝圳,彭炳勳,李崇誠,陳建璋,2013。
地面光達應用於林木競爭之研究,航測及遙 測學刊,16(4):279-287。
Bailey, R.L., and Dell, T.R., 1973. Quantifying diameter distributions with the Weibull function.
Journal of Forest Science, 19(2):97-104.
Bucksch, A., Lindenbergh, R., Menenti, M., and Raman, M.Z., 2009. Skeleton-based botanic tree diameter estimation from dense LiDAR data. In:
Proceedings of SPIE, the International Society for Optical Engineering, Lidar remote sensing for environmental monitoring No. 10, San Diego CA.
Cheng, Z.L., Zhang, X.P., and Chen, B.Q., 2007.
Simple reconstruction of tree branches from a single range image. Journal of Computer Science and Technology, 22:846-858.
Côté, J.F., Widlowski, J.L., Fournier, R.A., and Verstraete, M.M., 2009. The structural and radiative consistency of three-dimensional tree reconstructions from terrestrial lidar. Remote Sensing of Environment, 113(5):1067-1081.
Danson, F.M., Hetherington, D., Morsdorf, F., Koetz, B., and Allgöwer, B., 2007. Forest canopy gap fraction from terrestrial laser scanning. IEEE Geosciences and Remote Sensing Letters, 4:
157-160.
Emmingham, W.H., and Elwood, N.E., 2010.
Thinning: An Important Timber Managementtool. A Pacific Northwest Extension Publication, Oregon State University, Washington State University, University of Idaho PNW 184.
Fu, S.K., and Mu, J.K., 1981. A survey on image segmentation. Pattern Recognition, 13(1):3-16.
Hopkinson, C., Chasmer, L., Young-Pow, C., and Treitz, P., 2004. Assessing forest metrics with a ground-based scanning lidar. Canadian Journal of Forest Research, 34:573-583.
Horng, W.B., Hsiao, Y.F., and Chen, C.W., 2002.
Watershed-aid historical document reconstruction. in the 2002 15th IPPR Conference on Computer Vision, Graphics and Image Processing, Hsinchu, Taiwan, R.O.C., August 25-27, 79.
Hosoi, F., and Omasa, K., 2007. Factors contributing to accuracy in the estimation of the woody canopy leaf area density profile using 3D portable lidar imaging. Journal of Experimental Botany, 58(12):3463-3473.
Law, A.M., and Kelton,W.D., 2000. Simulation Modeling and Analysis 3nd ed. McGraw-Hill.
New York: 760 p.
Lefsky, M.A., Cohen, W.B., Acker, S.A., and Parker, G.G., 1999. Lidar remote sensing of the canopy structure and biophysical properties of douglas-fir western hemlock forests. Remote Sensing Environment, 70:339-361.
Lefsky, M.A., Cohen, W.B., Parker, G.G., and Harding, D.J., 2002. Lidar remote sensing for ecosystem studies. Bioscience, 52(1):19-30.
Maltamo, M., Eerikäinen, K., Pitkänen, J., Hyyppä, J., and Vehmas, M., 2004. Estimation of timber volume and stem density based on scanning laser altimetry and expected tree size distribution functions. Remote Sensing of Environment, 90:
319-330.
Moorthy, I., Miller, J.R., Berni, J.A.J., Zarco-Tejada, P., Hu, B., and Chen, J. 2010. Field characterization of olive (Olea europaea L.) tree crown architecture using terrestrial laser scanning data. Agricultural and Forest Meteorology, 151(2):204-214.
Moskal, L.M. and Zheng, G., 2012. Retrieving forest inventory variables with terrestrial laser scanning (TLS) in urban heterogeneous forest.
Remote Sensing, 4:1-20.
Negrón-Juárez, R.I., Chambers, J.Q., Marra, D.M., Ribeiro, G.H., Rifai, S.W., Higuchi, N., and Roberts, D., 2011. Detection of subpixel treefall gaps with Landsat imagery in central amazon forests. Remote Sensing Environment, 115:3322-3328.
Omasa, K., Urano, Y., Oguma, H., and Fujinuma, Y., 2002. Mapping of tree position of Larix leptolepis woods and estimation of diameter at breast height (DBH) and biomass of the trees using range data measured by a portable scanning lidar. Journal of Remote Sensing Society of Japan, 22:550-557.
Palleja, T., Tresanchez, M., Teixido, M., Sanz, R., Rosell, J.R., and Palacin, J. 2010. Sensitivity of tree volume measurement to trajectory errors from a terrestrial LIDAR scanner. Agricultural and Forest Meteorology, 150:1420-1427.
Pfeifer, N., Gorte, B., and Winterhalder, D., 2004.
Automatic reconstruction of single trees from terrestrial laser scanner data. ISPRS - international archives of photogrammetry.
Remote Sensing and Spatial Information Sciences, Vol. XXXV. B5:114-119.
Polo, J.R.R., Sanz, R., Llorens, J., Arno´, J., Escola`, A., Ribes-Dasi, M., Masip, J., Camp, F., Gra`cia,
F., Solanelles, F., Palleja`, T., Val, L., Planas, S., Gil, E., and Palacı´n, J., 2009. A tractor-mounted scanning LIDAR for the non-destructive measurement of vegetative volume and surface area of tree-row plantations: A comparison with conventional destructive measurements.
Biosystems Engineering, 102(2):128-134.
Sahoo, P.K., Soltani, S., and Wong, A.K.C., 1988. A survey of thresholding techniques. Computer Vision, Graphics, and Image Processing, 41(2):
233-260.
Sanz, R., Rosell, J.R., Llorens, J., Gil, E., and Planasa, S., 2013. Relationship between tree row LiDAR-volume and leaf area density for fruit orchards and vineyards obtained with a LIDAR 3D Dynamic Measurement System. Agricultural and Forest Meteorology, 171-172:153-162.
St-Onge, B., and Vepakomma, U., 2004. Assessing forest gap dynamics and growth using multi-temporal laser-scanner data. International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, Vol. XXXVI - 8/W2.
Taubin, G., 1991. Estimation of planar curves, surfaces, and nonplanar space curves defined by implicit equations with applications to edge and range image segmentation. IEEE Transactions on Pattern Analysis and Machine Intelligence, 13(11):1115-1138.
Thomas, V., Oliver, R.D., Lim, K., and Woods, M.
2008. LiDAR and Weibull modeling of diameter and basal area. The Forestry Chronicle, 84(6):866-875.
Urano, Y., and Omasa, K., 2003. Accurate estimation of forest stand parameters in Japanese cedar woods using a portable scanning LiDAR. In:
Proceedings of IAWPS2003. Daejeon, Korea, 403-407.
Leeuwen, M.V., and Nieuwenhuis, M., 2010.
Retrieval of forest structural parameters using LiDAR remote sensing. European Journal of Forest Research, 129(4):749-770.
Vepakomma, U., St-Onge, B., and Kneeshaw, D., 2008. Spatially explicit characterization of boreal forest gap dynamics using multi-temporal lidar data. Remote Sensing of Environment, 112:
2326-2340.
Watt, P.J., and Donoghue, D.N.M., 2005. Measuring forest structure with terrestrial laser scanning.
International Journal of Remote Sensing.
26:1437-1446.
Yang, J., Jones, T., John, C., and He, Y. 2015.
Object-based canopy gap segmentation and
classification: quantifying the pros and cons of integrating optical and LiDAR data. Remote Sensing, 7(12):15917-15932.
Yao, T., Yang, X., Zhao, F., Wang, Z., Zhang, Q., Jupp, D., Lovell, J., Culvenor, D., Newnham, G., Ni-Meister, W., Schaaf, C., Woodcock, C., Wang, J., Li, X., and Strahler, A., 2011. Measuring forest structure and biomass in New England forest stands using Echidna ground-based lidar.
Remote Sensing of Environment, 115(11):
2965-2974.
1 Ph.D. Graduate, Institute of Bioresources, National Pingtung University Received Date: Feb. 09, 2015 of Science and Technology. Revised Date: Jan. 29, 2016
2 Professor, Department of Forestry, National Pingtung University Accepted Date: Mar. 23, 2016 of Science and Technology.
* Corresponding Author, E- Mail: [email protected]
Application of LiDAR System for Monitoring and Management of Artificial Forest
Chun-Hung Wei1 Chaur-Tzuhn Chen2*
ABSTRACT
In this study, using 3D scanning Light Detection and Ranging (LiDAR) systems, which are the non-destructive methods, to investigate and monitor individual trees in artificial forest sample areas. Using ground-based LiDAR and traditional field survey data to obtain individual tree characteristic values which included tree height, diameter at breast height, canopy height, tree location map and evaluated the feasibility of ground-based LiDAR data in artificial forest areas. Results showed that the accurate information from the ground-based LiDAR system in permanent sampling plots, and different scanning stations could decrease occlusions. By using high density point cloud data, the height and diameter at different height of the tree could also be measured directly by the LiDAR systems. Different number of point cloud affected the accuracy of diameter. Results also showed that the systems could establish tree volume model non-destructively with tree height and DBH data obtained from ground-based LiDAR. Using threshold value to classify gap fraction, results showed that were accurate. Therefore, the results could be used to analyze the horizontal and vertical canopy structure, it was beneficial for the monitoring of plot dynamics in forest areas. Ground-based LiDAR could be used to determine tree measurements, tree competition and canopy gap which solve the problems of quantification and spatial research and also help with the stimulation of thinning operations. Results of this study were beneficial to artificial forest management and improved the forest resource inventory methods.
Key Words : forest management, thinning operations, ground-based LiDAR technology, 3D laser scanning, stand characteristics