PD Control of a Constrained Flexible Arm via Parallel Compensation
Liang-Yih Liu 1 , Hsiung-Cheng Lin 2
1 Department of Electrical Engineering, Chienkuo Technology University, Taiwan
2 Department of Electronic Engineering, National Chin-Yi University of Technology, Taiwan
1 [email protected], 2 [email protected]
Abstract
In this paper, the force control of a constrained one-link flexible arm is investigated using a linear distributed parameter model, including internal damping of Kelvin-Voight type. To overcome the inherent limitations caused by the non-minimum phase nature of the noncollocation from the joint torque input and the tip contact force output, a new input induced by the root bending moment, and a contact force output generated by a parallel compensator are defined. The transfer function from the new input to the contact force output proves that it is not only strictly minimum phase but also a stable condition. A PD controller is then designed to improve the performance of the overall closed loop system. It is shown that asymptotic tracking of a desired contact force trajectory with internal stability can be achieved accurately. In order to obtain exact solutions of the infinite-dimensional system, the infinite product formulation is used throughout the paper. Numerical simulations are provided to verify the effectiveness of the proposed approach.
Keywords: constrained flexible arm, parallel compensator, minimum phase system, infinite- dimensional system.
Introduction
Force control of constrained flexible manipulators has received an increasing attention in recent years [1- 8]. Application of this research field include space robots used for satellite capturing and large space structure construction, and light weight industrial robots used for assembly, deburring and grinding tasks. The controller design for such force control problems is, however, quite difficult due to the distributed parameter nature of flexible arms and the noncollocation of torque actuation and contact force sensing.
Several methods have been proposed for force control of constrained flexible manipulators. Based on finite-dimensional approximate models, Chiou and Shahinpoor [1-2] studied a single-link and a two- link constrained flexible manipulators, and pointed out that the link flexibility is the main source of dynamic instability of the force controlled systems.
Later, in [3], Li indicated that an inherent limitation on the achievable bandwidth of force control occurs due to the presence of infinitely many non-minimum phase zeros. It is known that the flexible arm is inherently infinite-dimensional system in nature. As a result, the design of the finite-dimensional controller for the constrained one-link flexible arm may become more complicated using the distributed parameter model.
Obviously, this phenomenon posted a difficulty for such a model to be realized. Somehow, the problem was overcome using the Lyapunov method by Morita et al. [4] and Endo et al. [5]. The asymptotic stability of the closed-loop system was also achieved. But the proposed method may not guarantee the constrained one-link flexible manipulator system to be stable.
Recently, the passivity-based PD control using the infinite product formulation presented a satisfactory performance outcome in the linear distributed parameter model [6] However, the internal material damping was not considered in this study by Liu and Yuan [6. In the recent advanced progress, Bazaei and Moallem [7] proposed a distributed parameter model for a constrained flexible beam actuated at the hub, achieving the maximum control bandwidth. Bazaei and Moallem [8] extended their work to improve force control bandwidth of the constrained one-link arm through output redefinition. Unfortunately, the suppression of high frequency modes may pay a high cost because of degrading the performance attainable.
To overcome the limitations of above papers, this
paper is to develop the asymptotic tracking of a desired
contact force trajectory, being achieved using a
distributed parameter model of the constrained one-link
flexible arm. In order to reflect the intrinsic property of
internal friction of the link material, a distributed
parameter model which includes the widely used
Kelvin-Voight damping has been considered. To
remove the nonminimum phase obstacle relating the
joint torque input and the tip contact force output, a
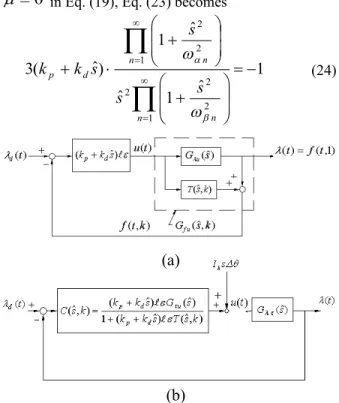
new input induced by the root bending moment and its
derivative, and a virtual contact force output generated
by a parallel compensation are defined. It will prove
that the transfer function from the new input to the
virtual contact force output has all its infinite number of
poles and zeros lying in the open left-half plane. Then,
a PD control is used to improve the performance of the
infinite dimensional closed loop system. To preserve the exact poles and zeros of the system, the infinite product representations of transfer functions are employed throughout the paper. Numerical simulations are presented to demonstrate the excellent performance of the proposed approach.
Dynamic model
Derivation of Equations of Motion
The constrained one-link flexible arm depicted in Figure 1 is a uniform, homogeneous, Euler-Bernoulli beam of length , mass per unit length , and flexural rigidity EI . The hub is modelled by a single- mass moment of inertia I where the driven torque h
)
(t is applied. The end-effector has a concentrated mass m p , where the contact force exerted by the smooth rigid constraint surface is (t ) . The c d 0 is a small damping constant of the beam material.The arm is assumed to move in a horizontal plane so that the gravity can be ignored. Let the X-axis be a fixed frame and x-axis be a floating frame, both coincident with the neutral axis of the beam.
The hub angular displacement (t ) is defined as the counterclockwise rotation of the x-axis with respect to the X-axis. Let v ( x , t ) be the small transverse deflection of the neutral axis of the beam with respect to the x-axis.
I
h ( ) t
( ) t v x t ( , )
m
p ( ) t
X x
x u ( x ,t )
Figure 1. Schematic of a constrained flexible arm The equations of motion and the corresponding boundary conditions are (the details are rather involved and thus omitted)
( )
( ) ( , ) ( ) ( )
0
x x t v x t dx t t
t
I
h
x ( t ) v ( x , t ) EI v x xx ( 0 , t ) c d EI v (1) x xx ( 0 , t ) 0
(2)
0 ) , 0
( t
v (3)
0 ) , 0 ( t
v x (4)
0 ) , ( )
,
( t c EI v t
v
EI x x d x x (5)
) ( ) , ( )
,
( t c EI v t t
v
EI x xx d x xx (6)
Substitute Eqs. (2) and (6) into (1), and perform integration by parts with Eq. (5), an alternative form for Eq. (1) is obtained:
) ( ) , 0 ( )
, 0 ( )
( t EI v t c EI v t t
I h x x d x x (7) The root bending moment v x x ( 0 , t ) can be measured by a strain gauge sensor [4,8] and its derivative v x x ( 0 , t ) can be detected by a full- bridge strain gauge [8]. This enables one to introduce a new joint input variable u (t ) such that
) ( )
( t I t
u h (8)
Non-Minimum phase transfer function from the input torque to the contact force
The transfer function can be derived by taking the Laplace transform of Eqs. (2)-(8) assuming zero initial conditions. Let s be the Laplace transform variable, and define the dimensionless parameters , , , ,
and sˆ as
c
dEI
21
4
, 3
I h
, s
s EI
21 4