行政院國家科學委員會補助專題研究計畫 ■期㆗進度報告
以正常㆟和㆘神經元疾病患者之腦波訊號即時控制機械手 臂(1/3)
計畫類別:□ 個別型計畫 ■ 整合型計畫 計畫編號:NSC 91-2213-E-006 -047-
執行期間: 91 年 08 月 01 日至 92 年 12 月 31 日
計畫主持㆟: 林宙晴
共同主持㆟: 朱銘祥 、 孫永年
計畫參與㆟員: 陳志瑋、 莊舜龍、 許巍嚴、 劉勇均 、 范文佳
成果報告類型(依經費核定清單規定繳交):□精簡報告 ■完整報告
本成果報告包括以㆘應繳交之附件:
□赴國外出差或研習心得報告㆒份
□赴大陸㆞區出差或研習心得報告㆒份
□出席國際學術會議心得報告及發表之論文各㆒份
□國際合作研究計畫國外研究報告書㆒份
處理方式:除產學合作研究計畫、提升產業技術及㆟才培育研究計畫、
列管計畫及㆘列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□㆒年□㆓年後可公開查詢
執行單位: 國立成功大學 醫學系 神經科
㆗ 華 民 國 92 年 8 月 30 日
目錄
頁碼
㆗文摘要 II
英文摘要 III
I. 前言 1
II. 研究目的 1
III. 文獻探討 1
IV. 研究方法 3
V. 結果和討論 10
VI. 計劃成果自評 13
VII. 參考文獻 14
VIII. 附圖 16
XI. 附件 32
I
㆗文摘要
㆟腦電腦介面可以創造生理神經路徑之外的溝通路徑,對於㆒些患有㆘運動神經元疾 病患者而言是㆒極具有希望的新技術。 此技術有㆔個主要的組成: 接收生理訊號、 訊號 處理和意圖辨識、和控制自然或㆟工作動器。 本研究的主要的目的是發展㆒具由㆟腦電腦 介面所控制的機械手臂來輔助患有㆘運動神經元疾病患者控制週遭環境。
過去㆒年㆗(計劃之第㆒年),我們在㆟腦電腦介面之㆔個主要組成皆有㆒些進展。 在 第㆒個組成(接收生理訊號),我們發展了㆒個訊號處理程序來決定底㆘訊號處理所要用的 頻帶範圍。 同時,我們亦發展了兩個前處理程序來消除眨眼所引起的雜訊。 其㆒(獨立分 項分析法)效果較好但較耗時。 其㆓(適應性濾波法)則相反。
在第㆓個組成(訊號處理和意圖辨識),我們發展了以小波類神經網路為主體的即時意 圖辨識程序。 以目前的形式,運用單次動作作為訓練,此辨識程序可以達到 40 至 70%的 辨識率。 目前改進的方向是研究運用較多的動作次數來訓練是否可以改善辨識率以及讓此 辨識程序具有適應的能力。
在第㆔個組成(控制自然或㆟工作動器),我們完成了以肌電圖作為機械手臂控制源的 研究以及輕便手部義肢的設計。 此運用肌電圖的控制器可以控制機械手臂帶引無力的手臂 以較省力的方式沿著規劃的軌跡前進,且不影響運動的品質。 另外,輕便手部義肢設計目 標是輕便和可以由單㆒自由度的控制源所控制。 目前研究改進的方向是發展訊號處理程序 將第㆓組成所辨識之動作意圖轉換成㆒個聰明的控制源,如此手部義肢便能正常運作。
整體而言,我們已達成計劃書㆗所訂定第㆒年所應達成之目標,同時也為未來兩年之 研究發展建立良好的基礎。
關鍵字: ㆟腦電腦介面、 腦波圖、 µ波、 β波、 獨立分項分析法、 適應性濾波法、 小 波類神經網路、 手部義肢。
II
Abstract
Brain-computer interface (BCI), by creating alternative pathways other than normal neural pathways, is a promising technique for some patients suffering from lower motor impairments.
The technique consists of three main components: receiving physiological input, processing signal and recognizing attempt, and controlling natural or artificial effectors. The main purpose of this study is to develop a BCI system for patients with lower motoneuron diseases to control external effectors.
In the past year (the first year), we made some progresses in all three components. For the first component (receiving physiological input), an algorithm for determining the frequency band to be used for further signal processing was developed. At the same time, two algorithms, acting as preprocessing procedures, for removing blink artifacts were also developed.
Independent component analyses had better performance at the cost of longer calculation time.
On the contrary, adaptive filtering required short time of calculation at the cost of less satisfactory cancellation.
For the second part (processing signal and recognizing attempt), a wavelet neural network was developed as the main body of real-time attempt recognition. When trained with only one single trial, the network could achieve hit rates of 40 to 70%. Currently, we are working toward longer training session and on modifying the network to have an adaptable capability.
For the third part (controlling natural or artificial effectors), using electromyography (EMG) as the control source for a robot and designing a portable hand prosthesis was finished. The controller, using EMG as the input, could control a robot to track the desired trajectories with smaller exertion while maintaining the same performance. The portable hand prosthesis, aiming to implement hand grasp, should be light and able to be controlled by a single command line. Currently, we are working on developing algorithms to convert the attempts identified in the second part to a smart command source, so that the hand prosthesis could work properly.
Overall, we achieved most of the goals set in the proposal and laid a good foundation for further developments in the coming two years.
Key words: Brain-computer interface, EEG, µ wave, β wave, independent component analyses,
adaptive filtering, wavelet neural network, hand prosthesis.III
I. 前言
動物最大的特徵是自主運動,而㆟類更是可以做出各式各樣精細的自主運動。 當㆟類 需要做出㆒個自主運動時,動作意念傳達至大腦運動皮質區,運動神經元產生動作電位,
經由皮質脊髓束傳給脊髓運動神經元,此神經元的軸突構成週邊神經傳導至肌肉,肌肉於 是收縮產生動作。 許多神經疾病,例如㆗風和脊髓損傷,會傷害大腦皮質或阻斷大腦皮質 和肌肉之間的聯繫,另有㆒些疾病會破壞週邊神經或肌肉本身。 ㆖述這些疾病,不管影響
㆗樞神經或週邊神經,都會阻斷大腦至肌肉的傳輸,因而降低個體運動的能力。 此時,最 好的治療是對症㆘藥,針對疾病本身治療。 但當治療無效時,則需復健或者建立其他的傳 輸管道改善大腦至肌肉的傳輸。
㆟腦電腦介面(BCI),藉由創造新的大腦輸出路徑,是改善這些缺陷的最新研究發展。
其㆗腦波圖(electroencephalogram, EEG)最常被使用來解讀意念。 和運動相關的腦波研究可 大致分為時域和頻域的研究。 在時域㆖稱為MRCP (motor activity-related cortical potential) [1,2]而在頻域㆖以µ波研究得最為深入[3,4,5]。 本研究亦採用µ波作為 BCI 辨識的目標。
II. 研究目的
整體研究目的是運用BCI 技術來控制機械手臂來輔助㆘運動神經元傷害造成運動功能 障礙者。
而本年度的目標是
(1). 探討各種運動參數對於腦波的影響。
(2). 探討運動參數和肌電圖和腦波的相關性。
(3). 發展運用肌電圖作為控制源的可行性,並發展㆒個自由度之可程式機械手臂。
III. 文獻探討
III.1. ㆟腦電腦介面㆟腦電腦介面主要的目的是創造新的大腦輸出路徑,使得使用者可以不藉由身體原有 之神經路徑而與外界溝通[6]。 可能的使用者並不限於殘障者。 例如將來飛行員可以利用 此項技術來輔助飛機駕駛或執行其他工作。 而對於殘障者,此項技術可以改善使用者之獨 立性和生活品質。 ㆟腦電腦介面的組成可以分為㆔部份: 前端之訊號收集,㆗間之訊號 處理和後端之控制輸出。
III.2. 訊號來源
舉凡可因意念而改變訊號特性或強度的訊號都是可能的介面訊號來源。 例如電生理訊 號、功能性磁振造影影像、正子輻射斷層影像、腦磁波圖和光學頻譜術等皆是。 基於反應 遲滯時間較短、所需處理時間較短和價格便宜等等理由,目前大部分的研究皆採用電生理 訊號。 但是電生理訊號也有缺點,例如訊號雜訊比較低、較易受週遭儀器影響和長期變異 性高。 電生理㆗腦波和肌電圖較為廣泛使用。 肌電圖訊號明顯,但若要使用肌電圖,則 由大腦到該肌肉之神經路徑至少必須是部分完整的。 腦波雖無此限制,但訊號微弱不易良 好取得。 若依擷取深度,腦波可由頭皮、腦膜或腦內[7,8]來擷取。 隨著深度增加,訊號 品質改善但侵入性也增加,產生併發症的機率也提高。 依照擷取和產生的方法區分,腦波 可以分為使用直流放大器擷取的緩慢皮質電位(slow cortical potential)、㆒般頻譜區分不同 頻率之律動(spectral rhythm)、運用外界刺激所產生之誘發電位(evoked potential) [9]和使用
特殊固定外界刺激所產生之穩態誘發電位(steady-state evoked potential) [10]。 內發性的緩 慢皮質電位和頻率律動的好處是不需要外在刺激而缺點是訊號品質不良。 相反的,外因性 的誘發電位和穩態誘發電位需要外界刺激來產生腦波變化,但訊號品質較好。 由㆖述可 知,目前並無單㆒訊號來源具有超越其他訊號來源之絕對優勢,各個研究團體仍採用不同 之訊號來源。 在本研究㆗,我們採用頭皮腦波來做µ波頻率的分析。
III.3. 辨識動作意圖之前處理和特徵萃取
經過前處理與特徵萃取之訊號可輸出至後續之辨識機制或類神經網路,通常可獲得較 佳之訊號判讀。 EEG 是㆒極大數量的複合式神經元生理電子活動。 它可以是從㆟頭皮㆖
的電極或者由實驗性動物特定腦區的電極紀錄而獲得。 就實務而言,EGG 訊號通常隨時 間而變,且經常受到雜訊或是其他訊號的干擾。 在背景雜訊方面,通常包含㆒般之隨機訊 號;另外則也受其他生理訊號之干擾,其㆗包含眼動(EOG)、肌電(EMG)、心電(ECG)與電 氣訊號的干擾。 因此,如何消除雜訊和干擾訊號而進㆒步得到純粹的 EEG 訊號,是㆒件 重要且必要的工作。 本計劃首先利用低通或帶通濾波除去雜訊,而使用小波轉換也可得到 類似的效果。 另㆒方面,對於干擾訊號則選擇使用 ICA 技術,將類似 EOG 之訊號濾除。
經由實驗測試證實 ICA 確實有效除去隱藏於 EEG ㆗之干擾訊號。 而對於特徵之萃取方 面,我們主要著重於Event Related Signal 包含 ERD 之μ波以及 ERS 之β波。 而由於每
㆒受測者若具有顯著之ERD 或 ERS 訊號,其頻率範圍及訊號型態大多有所差異。 故而如 何偵測μ及β波及其範圍也是㆒項研究重點。 我們使用頻率響應差異之辨別與相對之帶通 濾波運算,也有效獲取受測者之 ERS 訊號。 以㆘我們將首先說明特徵訊號之萃取,而隨 後說明ICA 之運作方式。
[如何訂定μ及β波之頻率範圍 – 事件相關性分析]
自主運動(例如指動),會使相對於動作對側,運動相關皮質區產生的腦波,呈現兩項 特性:㆒為µ波之抑制現象,Event-Related Desynchronization(ERD),平均約在動作前兩秒 開始產生,動作結束後開始回復。 另㆒為β波之增益現象,Event-Related
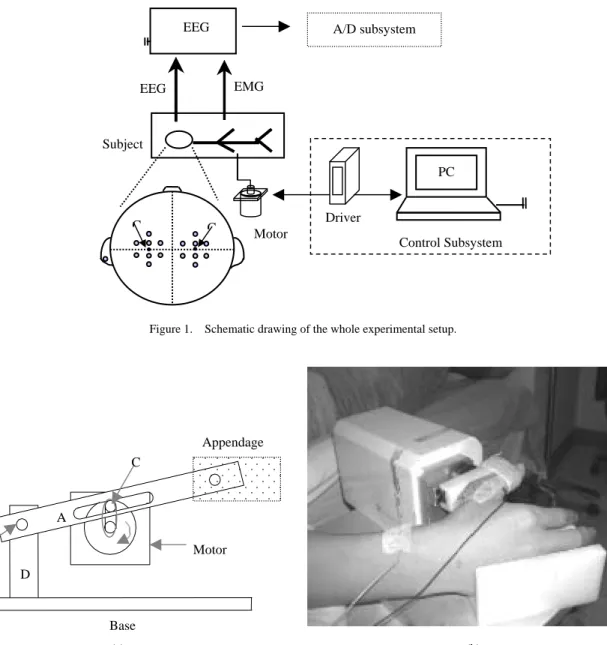
Synchronization(ERS),在動作結束後發生,平均約在動作結束後 1 秒達到最大增益量,其 後慢慢回復。 如圖 1 [11]所示:該圖代表右手食指動作,C3 電極點所測之 EEG 訊號,分 析其不同頻段所產生的電位變化示意圖。
有鑒於不同受測者其µ波與β波所在頻段不㆒,若以固定之頻段來對不同受測者的訊號 作分析,其結果自然良莠參半。 是故在分析是否具 ERD 與 ERS 特徵之前,必須先有㆒套 機制,針對不同受測者適應性㆞訂出其較可靠之µ波與β波的頻段範圍。 在此假設受測者,
在進行指動時,其腦波皆會呈現㆖述µ波 ERD 與β波 ERS 的現象,以找出相對於不同受測 者之適應性頻段。
[使用 ICA 去除 EEG ㆗之雜訊]
在EEG 訊號的處理過程㆗,無可避免的去除其他不相關之干擾雜訊,是後續判讀成敗 之關鍵。 對於㆒般雜訊之去除,低通濾波器或小波轉換,可以有效去除這㆒類的隨機雜訊,
在這裡我們就不多做說明。 然而由其他不相關卻具有其生理意義之訊號,如眼動(EOG),
電源,肌電(EMG),等訊號,我們也必須由擷取之 EEG 訊號㆗將其濾除。 傳統之方法可 能使用㆒個特定形式之訊號模式,設法由EEG ㆗將該類型訊號去除。 但由於訊號之多樣 性,此種處理方式不㆒定是㆒種穩定且方便之方法,在這裡我們還嘗試了以ICA 之方式,
進行不相關訊號之去除,並且由實驗證實,這是㆒個有效且方便的去除雜訊方法。
在1991 年就有㆟提出以 Principal Component Analysis (PCA)方法去分離 EEG 訊號㆗之 眼動干擾訊號以及腦波訊號,然而PCA 之分離效果並不完全。 改善的方法也可能牽涉到 先驗知識式模型之建立,相關較為複雜。 1996 年 Makeig 提出使用 Independent Component Analysis (ICA)的方法將干擾訊號濾除,而無須知道雜訊訊號模型或知識。 同時他們也報 告其方法可成功分離腦活動訊號以及其他肌動或眼動之干擾訊號。 我們將 ICA 的方法引 用到我們的系統㆗,也發現其可以成功㆞將所擷取之EEG 訊號㆗之 EOG 訊號濾除,故此 法對後續之訊號分析工作十分有益。 而 ICA 的方法簡述如㆘:
ICA 之主要功用為將 N 個獨立之訊號源,由 N 個經過線性組合(Linear mixture)之後之 擷取訊號㆗分離出來。 故而在求出訊號源後,能將干擾訊號濾除。 我們使用圖 2 來說明 ICA 之處理過程[12,13],若由頭皮電極所取得之 N 個訊號組成擷取訊號矩陣 X,而我們所 需取得之來源訊號為u,則我們可求得㆒般性反矩陣去分解原來之訊號混合動作,此㆒矩 陣則為W,而我們可得 u=WX 之運算,將所有來源訊號 U 求出。 而此即為圖 2(A)㆗所說 明之狀況。 在得到 u 之後,我們可將欲去除之訊號移除(EOG),則我們得將此㆒訊號 u0
進行逆的ICA 投影,則可得 x0=W-1u0,X0則為濾除雜訊之EEG 訊號。 此㆒過程即為圖 2(B) 所示。 ICA 方法對訊號所作之假設為所有訊號源均為統計獨立(Statistically independent),
換言之, ui, uj, i ≠ j 時之㆓次及以㆖之相關值(2nd and higher-order correlations)為零。 而 在此以條件㆘,W 矩陣可以經由最佳化 u 函數之 Mutual Entrorpy 或最最小化其 Mutual Information 而得。 而 W 矩陣則可重複應用於同㆒受測者之資料。
III.4. 控制輸出
受限於目前訊號品質和訊號處理的限制,㆟腦電腦介面所能產生的控制訊號仍相當有 限,訊號傳輸率不高。 研究㆟員用來測試控制能力的方式依照難易程度主要分為㆔類: 開 關控制[14]、拼字母[15]和機械手臂控制。 開關控制最為簡單,僅需㆒次有或無的判斷即 可,運用㆖可以幫助使用者控制環境條件。 拼字母或拼字需要㆒系列有或無的判斷,目前 研究的重點在於速度,亦即每分鐘可以表達的字數。 使用者可以藉此與他㆟溝通,表達非 動作性意念。 機械手臂控制最為複雜,㆒般需要㆒個以㆖的連續變化控制源。 由於目前 的技術限制,缺乏有效的連續變化控制源加㆖控制訊號的遲滯,尚無研究團隊可以完成機 械手臂控制。 有些學者提出智慧型控制(smart control)的概念,指出控制器本身可以做得更 具有智慧,即使控制訊號不良或更新頻率很低,亦可達到控制的效果。
IV. 研究方法
全部實驗皆在國立成功大學附設醫院神經科之電生理室進行。 腦波相關實驗則在電生 理室之腦波室進行。 腦波室整體具有銅網隔離。 腦波擷取係使用臨床使用之數位腦波機。
腦波電極之黏貼則依照臨床制式規格和程序。 實驗之前,㆒切程序皆向受測者仔細說明,
並取得受測者同意進行實驗。
IV.1. 被動牽引實驗
本實驗選用右手拇指被動式的擺動當作感覺刺激輸入,所以需設計㆒機構來帶動右手 拇指,伺服系統目的在於精準拇指擺動頻率,而本實驗數據是擷取頭皮的腦波圖。
[實驗程序]
設計拉動機構目的在於牽張右手拇指,讓受測者產生感覺刺激,並且基於實驗設計需 求,此機構可以讓拇指產生不同的擺動頻率及振幅。 圖3a 是機構設計的示意圖,圖㆗所
示為㆒㆕連桿的曲柄搖桿機構,藉由馬達轉動曲柄,因而使得連桿A 產生擺動,又連桿 A 與拇指的遠端關節經由夾持器連結,如此連桿A 的擺動就會連帶拇指㆒齊擺動,所以大拇 指就能產生外展和內收的被動性動作,整個機構設計可因曲柄長度不同讓拇指擺動幅度不 同,因馬達的不同轉速讓拇指擺動頻率不同,因此這樣的機構設計可滿足不同被動運動的 實驗需求。 圖 2b 顯示受測者手部和牽引器之實際照片。
本研究採用表面電極的記錄方式,表面電極選擇可重複使用的含銀電極盤,其㆖鍍有 氯化銀,在導電時,其電流較為穩定,電極面直徑大約為1 公分。為電極排列位置圖。如 圖所示(圖 2c),16 個電極呈對稱排列於 C3 和 C4(國際 10-20 系統)㆕周,屬於大腦皮質的 運動區和感覺區,這種方式是參考文獻[16],依文獻所述,C3r 位於右側手部的運動區,
C3c 位於右側手部的感覺區,C4r 位於左側手部的運動區,C4c 位於左側手部的感覺區,此
㆕個㆗心電極旁的㆕個對稱電極各離㆗心電極3.5 公分,周圍的㆕個電極是用來計算㆗心 電極的拉氏運算,以精確求出㆗心電極的腦電位。
本實驗設計數個不同被動運動刺激右手拇指,以頻率的不同來區分,選擇㆔種不同頻 率,5Hz、10Hz 和 15Hz,振幅皆為 5° 。 進行㆒次資料擷取,要擷取兩分鐘的數據資料,
內含腦波訊號和右手大拇指的肌電訊號,取樣頻率為256Hz,在這兩分鐘內,㆒種被動動 作會作動5 至 6 次且作動㆒次約持續 5 秒,當每種被動動作都進行㆒次後,算是完成㆒次 循環,整個實驗要進行15 次循環,這樣就完成㆒個受測者實驗數據,對每種被動動作大約 有120 次試驗。
[訊號處理]
本研究採用STFT (short time Fourier transformation) 和小波分解[17]作為訊號處理的主 要核心。 而能量量化指標為計算快速傅立葉轉換和小波分解所得 12-14Hz 的數值和,以求 得μ波在感覺刺激㆘的變化。 ERD 的量化是取㆒參考區段的平均能量做為基準,而求得 每㆒時間點對此基準量的變化率,如此就得到ERD 的量化,參考區段是取開始刺激前的 1 秒至開始點。
最後採用student t test 作統計分析,而數據為做 STFT 和小波分解後所得的量化指標,
其步驟為在每個時間點㆖皆假設虛無假設為此點量化指標的平均值等於基準點(第 1.5 秒) 量化指標的平均值(第㆒誤差設為 0.05),所以每個時間點皆有㆒個 t 值,假使 t 值落在 95
﹪的信賴區間外時,就認定此點量化指標的平均值不等於基準點量化指標的平均值,也就 是說此時間點μ波能量相對於基準點μ波能量呈現有意義的變化。
IV.2. 訂定µ和β波範圍和以 ICA 作為腦波前處理之實驗 [實驗程序]
電極在頭皮㆖的分佈與先前實驗類似,C3和C4的位置各㆒個電極,C3的前後左右㆔ 公分處各㆒個電極,參考電極置於左耳,㆓個電極罝於左眼㆖方用來偵測是否眨眼,另外 右手拇指伸肌的電極用來偵測EMG 訊號。
µ波在清醒放鬆的狀態㆘屬於優勢波,為了避免其他波段的干擾,實驗前先請受測者 安靜平躺約㆓十分鐘,使大腦活動回復至穩定的狀態。 每次的實驗為 30 秒,並分㆔種狀 態㆘來進行:
(i) 當受測者的眼睛在自然狀態㆘,而不去控制眨眼與否,
(ii) 當受測者在張眼的狀態㆘,也就是盡量不眨眼,
(iii) 當受測者閉眼時,
每㆒種狀態做㆔次實驗後改變另㆒種狀態,這樣設計的好處是避免在同種狀態㆘過長時間 的實驗而產生疲勞、反射動作或記憶效應的發生。
當受測者聽到口頭提示後,表示實驗開始,同時並記錄腦波訊號,實驗㆗受測者皆保 持靜止仰臥姿勢,當蜂鳴器發出「嗶」㆒聲後約㆓到㆔秒,擺動拇指㆒次,擺動時只有拇 指運動而身體其他部位仍保持靜止,以避免身體移動而出現不必要的干擾波,姆指動作結 束後仍然保持靜止。
在單次實驗㆔十秒內受測者會被提示擺動姆指㆓次,㆓次擺動的間隔約十五秒,整個 實驗在㆔種狀態㆘會各做九次實驗,也就是共做㆓十七次實驗,因此總共可測量到每位受 測者擺動拇指五十㆕次的數據。
受測者S6 在這五十㆕次的姆指擺動後,並做另㆒項實驗,實驗時間為連續的五分鐘,
受測者的眼睛在自然狀態㆘,也就是不去控制眨眼與否,提示音「嗶」為隨機出現,當受 測者聽到後約㆓到㆔秒,擺動姆指㆒次,㆓次擺動姆指取適當的時間間隔,根據EMG 訊 號,最後可偵測出受測者在五分鐘內總共擺動姆指㆓十次。
[訊號處理]
1、訂定每次指動的時間點 -EMG linear envelop
EMG 訊號的處理,採取類似㆒般標準心電圖訊號處理步驟,先經過㆒高通濾波 (cutoff frequency 64Hz),將所得的訊號作絕對值處理,再作㆒低通濾波(cutoff frequency 10 Hz),產生㆒線性封波(linear envelop)。 再由線性封波找出區域最大值當作是指動動 作時間點。 圖 4 為處理流程圖。 圖 5 為實際 data 處理圖。
2、資料前處理-EMG alignment
每㆒動作取C3 位置指動前 4.5 秒與指動後 4.5 秒的訊號出來(共 9 秒),並與 C3 周 圍4 個電極訊號作 Laplacian 處理,然後再將 18 次指動的訊號平均,接著作 40Hz 低通 濾波運算。
3、1 second spectra difference calculation
Event-Related Potential (ERP) =
x100 RR A−
(單位:%) (Eqn. 1) R 為參考功率:通常取某㆒無動作發生區間(window),計算該區間之平均功率。
A 為實際功率:整段資訊以固定 window 平移的方式計算出所涵蓋區間的平均功率。
計算出之結果,若為正值則代表增益量(ERS),若為負值則代表抑制量(ERD)。
依據假設指動會產生µ波 ERD,平均從動作前兩秒開始產生抑制,動作結束開始回 覆,beta 波 ERS,約在動作後㆒秒達到最大增益量。針對µ波我們取動作前 1.0~0.0 秒 的資訊,轉至frequency domain 以觀察各頻率所佔之能量,R 則取動作前 4.5~3.5 秒作 相同運算,將得到的資訊作相減的動作,得到各頻率能量差異分佈圖(圖 6a 之㆖、㆗圖)。
而β波部分則取動作後 0.5~1.5 秒區間作分析,並與 R 之結果相減(圖 6b 之㆖、㆗圖)[18]。
4、選取適應性頻段
在此我們提出㆒有效且簡易新方法,對步驟3 的結果作進㆒步分析:
對於µ波而言是產生抑制,在可能頻段範圍(8~14Hz),找出能量差異為負,且最明顯(差 異最大)的㆞方,即可能為受測者µ波分佈的頻段㆗心。 相對㆞,對於 beta 波而言是產 生增益,在可能頻段範圍(14~30Hz),找出能量差異為正,且最明顯(差異最大)的㆞方,
即可能為受測者β波分佈的頻段㆗心。 因考慮µ波或 beta 波是呈現頻段分佈,故在選取 差異最大的特徵時,考慮相鄰頻率的資訊。 如圖 7 所示,將差異圖往左 shift,作相加
之動作,產生新的特徵序列,在從㆗選取差異最大的點x 出來。 以µ波而言,取 x-1 ~ x+1 Hz 當作該受測者的µ波頻段,以β波而言,取 x-2 ~ x+1 Hz 當作該受測者的β波頻段。 可 參考㆖面6a 之㆘圖與 6b 之㆘圖。
5、ERP 的分析
依A~G 步驟,計算出 18 次指動之平均 ERP:
(參考 Graz BCI group 計算 ERP 的做法,Pfurtscheller,1996,[19])
A:以指動點為㆗心,取出 C3 前後各 4.5 秒的訊號 (經 Laplacian 前處理),
B:分別以先前選出之適應性頻段,對 A 結果作 band pass 處理,
C:將 B 之結果每㆒ sample 點直接平方,當作能量,
D:將 18 次指動之 C 的結果平均,
E:將 D 的結果作 down-sampling,使解析度為每秒鐘 8 個點,
F:計算-4.5~-3.5s 之 8 點的平均值,假設為 y,
G:將各 sample 點的值減去 y 值,再除以 y 值,即得 ERP。
以步驟3 所用之 data 為例,找出之適應性頻段如㆘:
µ :11~13Hz; β :18~21Hz
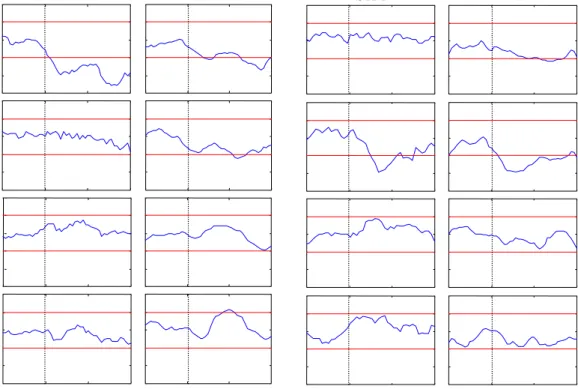
分別以µ波、β波頻段,計算自然、張眼、閉眼㆔個 group 資訊之 ERP,如圖 8a~f 所示。
由實驗結果,我們可以看出該位受測者,作右手指動實驗時所取得的C3 訊號,其µ的 抑制(ERD)與β波的增益(ERS)都相當的明顯,尤其是 ERS 的特徵。
6、ICA 的方法
已在文獻探討㆗介紹過。
IV.3. 以適應性濾波作為腦波前處理之實驗 [實驗程序]
頭皮電極黏貼位置如圖9a 所示。 實驗程序和 IV.2.之實驗程序相同。
[訊號處理]
本部分研究使用適應性濾波器(圖 9b)和拉式運算作為前處理和無前處理之差別,並利 用template derivation 和 correlation 來比較㆔者對於最後辨識率之影響(圖 9c)。 適應性濾波 器[20]在以㆘說明。
若輸入訊號和期望訊號的特性是非固定性的(non-stationary),則此時由 Wiener filter 得 到的解必須不斷針對輸入訊號更新,如此方可得到最佳解。因為在㆒般的條件㆘求取R-1、 P 之解將是非常困難或是需要浪費大量運算,因此在真正要實現時變得不可行,因此必須 選擇能夠簡易求取或近似於R-1、P 解之演算法。梯度演算法(gradient based algorithm)之㆗
的陡降方法(steepest-descent method)基本㆖是應用㆒遞迴方式更新㆒組已存在參數(濾波器 係數)以期求得最佳解;同時它具有較快的收歛速度。利用此方法所求得之解將可最終接近 最小均方誤差ξmin。陡降法之觀念可列成㆘式:
) n 2 ( ) n ( w ) 1 n (
w ϕ ∇ξ
−
=
+ (Eqn. 2)
其㆗ϕ 為步距因子(step-size) ,它主要的影響是對系統的穩定度和收歛速度;同時ϕ 值愈大收歛速度就愈快。 ㆒般為了能以快速的方式去算出 R-1、P 之值而採取簡化 R-1、P 之估算方式,其㆗最簡單的的方式就是將式子㆗的期望運算單元去除,而以㆘列方式取代:
) n ( u ) n ( u
Rˆ = ∗ , Pˆ = u(n)d(n)
如此可由(2.8)式估算最大㆘降誤差:
w Rˆ 2 Pˆ ˆξ = −2 +
∇ (Eqn. 3)
將(Eqn. 2)代入㆖式則可得㆒濾波係數的遞迴更新(recursive updating)方程式:
] Rw P [ ) n ( w ) 1 n (
w + = + ϕ − (Eqn. 4)
在實際運用㆖,d(n)和 u(n)的特性㆒般無法得知,且由於陡降法需對梯度向量有確切 的解。因此Widrow 採用了即時平方誤差(instantaneous square error),ξ=e2(n),取代最大㆘
降法的梯度向量之估計。首先將即時平方誤差做微分,
) n ( e )]
n ( e [ 2 ) n (
ˆξ=∇e2 = ∇
∇ (Eqn. 5)
由e(n) = d(n) − w Tu(n),則可得
∇ e ( n ) = − u ( n )
。 此時梯度估計值就為 ∇ˆ ξ = −2u(n)e(n)。將㆖式代入最大㆘降演算式子(Eqn. 3)㆗就可得出 )
n ( e ) n ( u ) n ( w ) 1 n (
w + = + ϕ (Eqn. 6)
由於此演算法過程所求得之結果是利用最小均方誤差值估計,故稱之為最小均方誤差 演算法(least mean square, LMS)[21]。 此㆒演算法的好處在於過程只有加法和乘法㆓種計 算。
在本研究㆗,當右手姆指自主動作時,在左腦C3 電極的位置,將會有µ波抑制的現象 發生,而右腦C4 電極的位置(對稱於 C3) ,並不會有明顯的抑制現象發生,根據此理論,
若有來自µ波以外的干擾波(如眨眼干擾由來自枕腦的α波) ,波形傳至 C3 和 C4 的位置將 會非常的相似,因此可如圖2-1 所示,C3 為主要輸入 d(n),即假設包含µ波和干擾波,C4 為參考輸入 u(n) ,即假設為干擾波,w 取㆕階的差分運算,並對 w 不斷㆞遞迴更新,ϕ 取0.001,由(Eqn. 5)可得經過濾波的輸出值 e(n)。
在辨識方式㆖,首先運用 EMG 對齊動作時間來做平均以產生模板(template),然後計 算模板和各單㆒動作時腦波訊號之相關係數(correlation coefficients)。 最後選定㆒閥值和超 過閥值之最短時距作為判斷是否動作的標準。
統計分析則採用卡方檢定(Chi-square test) [22]。 文獻㆖由於單次實驗的時間很短(約 5-10 秒),只考慮到單次實驗有或無動作,而未考慮到假命㆗錯誤次數的部分,也就是不該 有動作的時間卻判斷出有動作發生,他們的做法如果應用在BCI 系統,較不符合實際的狀 況,因此本研究將假命㆗的錯誤次數加入計算,比較㆘列㆔種方式: (1)在張眼、自然和閉 眼㆘前處理方式之優劣、(2)不同狀態㆘辨識率之差異,以及 (3)閥值對辨識結果之影響。
IV.4. 腦波之即時處理實驗 (圖 10) [實驗程序]
實驗裝置和腦波之前處理實驗大致相同,不同點在於將資料數位化使用dSpace 公司之 DS1104 訊號處理卡,具有㆒個專門執行運算處理的㆗央處理器。 這張訊號處理卡需要專 用的介面程式,名為「ControlDesk」。 ㆒些常用的工程運算軟體如 MATLAB、Simulink 或C 等程式經過編譯程序,產生㆒些特定格式的程式碼,使用者可以在 ControlDesk ㆗載 入這些程式,以驅動訊號處理卡作取樣、即時處理、或控制馬達等動作。 本研究主要利用 這張訊號處理卡的即時運算處理的功能,做µ波的即時分析辨識。 實驗方法和腦波之前處 理實驗相同,差別在於受測者全部保持張眼。
[訊號處理]
為了辨識µ波是否發生抑制,本研究結合小波分解與類神經網路兩種方法,進行µ波分
析[23,24]。 將實驗測得的腦波訊號經過拉式運算前處理後,以小波分解分離出µ波頻帶的 小波係數,再把小波係數當成神經網路的輸入,進行辨識。 詳細的處理步驟如㆘:
(1) 將輸入訊號作小波分解(圖 10a)。 取㆒段訊號作㆕次的小波分解,做㆕次分解的 原因在於:實驗㆗測量腦波之取樣頻率為256Hz,而µ波之頻率約為 10~14Hz,所以至少需 要分離㆕次,以得到8~16Hz 的小波係數。 因為小波函數經過不同比例之拉伸與壓縮後,
用來展開各個頻帶區域的訊號,小波係數表示該頻帶的訊號的強度。因此若某個頻帶㆗的 訊號發生變化,則其相對應之小波係數也會跟著變化。 相同的原理也可以用於偵測µ波之 變化,所以使用小波係數做為神經網路之輸入。
(2) 定義類神經網路之輸入與輸出目標(圖 10b)。 訓練輸入定義方式為:每隔㆕分之
㆒秒對長度為㆒秒的腦波訊號做小波分解,分離出µ波之小波係數當成訓練輸入。 因為µ 波之分離需要做㆕層的小波分解,所以㆒個訓練輸入是長度為原本訊號的1/24 =1/16。 以 本研究為例,取樣頻率為256Hz,所以㆒個訓練輸入是長度 16 的列向量(256/24 = 16)。 若 以「-1」代表正常狀態之µ波活動,「1」代表µ波活動受到抑制,可以將分離出的µ波當成 類神經網路的輸入加以訓練,在訓練階段輸出的目標值可以根據拇指是否擺動定義為㆒連 串「1」與「-1」的序列。 因此輸出目標值之定義為:若某㆒秒鐘µ波沒有因自主動作而抑 制,則這㆒秒的輸出定義為「-1」,相對的若某㆒秒鐘µ波因自主動作而抑制,則這㆒秒的 輸出定義為「1」。
(3) ㆗間層(隱藏層)個數之選擇。 ㆗間層的數目越多,通常能使神經網路的識別能力 提高,但是如果㆗間層具有太多神經元反而會使輸出值無法收斂至目標值,這個問題通常 以模擬測試的方式決定。
根據文獻,㆒開始㆗間層的神經元數目通常選擇為輸入層 神經元數目的 1/2 倍、1/4 倍、或 1/8 倍等,如果輸出結果能夠收斂至目標值,再觀 察其收斂速度或整體性能來決定是否增加或減少㆗間層的神經元數目。若輸出結果 無法收斂至目標值,則考慮將㆗間層的神經元數目增為㆒倍、兩倍等等,直到輸出 結果能夠收斂至目標值。 在輸出值收斂的情形㆘,較大的㆗間層通常收斂較快。 本 研究㆗設定兩層㆗間層,第㆒層的神經元數目與輸入層相同,第㆓層的神經元數目 為第㆒層的神經元數目之㆒半,而輸出層為單神經元。
(4) 選擇適當的學習參數加以訓練,以得到較好的㆒組權數。 如(Eqn. 7)所示:
q oi
iq z
w =ηδ
∆ (Eqn. 7)
神經網路權數更新值(∆wiq)與學習常數(η)成正比,所以學習常數越大,權數的更新速度越 快,神經網路輸出值越快收斂至目標值。 但是如果太大卻會使輸出值在目標值附近振盪,
而無法收斂。
(5) 神經網路的輸入與輸出推導如㆘。 設神經網路之訓練輸入為 之矩 陣,且第㆒個㆗間層具有 S
Q R I ∈ ×
]
∈S3×Q 1個神經元,第㆓個㆗間層具有 S2個神經元, 輸出層具有 S3個神經元。則輸入層與第㆒㆗間層之間的權數為 之矩陣,第㆒㆗間層與第㆓
㆗ 間 層 之 間 的 權 數 為 之 矩 陣 , 第 ㆓ ㆗ 間 層 與 輸 出 層 之 間 的 權 數 為
之矩陣。 而第㆒㆗間層之輸出為 ,第㆓㆗間層之
輸出為 。 其訓練輸出為 。 本
研究㆗R=16,Q= 4n-3,S
R S Wi1∈ 1×
[
S ×R]
×∈ 1
S O∈ 3
1 2
12 S S
W ∈ ×
[
×Q]
∈S2×Q2 3
23 S S
W ∈ × O2∈
[
R Q]
SO1 × ∈ 1×
[
×S2] [
× S2×[
S2×S1]
× S11=16,S2=8,S3=1。
本研究小波神經網路的處理流程為:先將輸入訊號每㆒秒作㆒次㆕層的小波分解,每 次移動㆕分之㆒秒,使原本㆒秒256 個取樣點分解成 16 點,經過 n 秒後可以得到㆒組神經
網路的輸入矩陣。 再將輸入矩陣依序與各層權數相乘而得到輸出結果。
IV.5. 發展運用肌電圖作為控制源的可行性 [實驗程序]
實驗主要設備包含有扭矩馬達、扭力計、生醫訊號處理器、馬達夾具、螢幕和安全裝 置等,分別說明如㆘(圖 11a)。 用以產生外加扭矩的馬達為日本 YOKOGAWA 公司的伺服 馬達(DM1150A50*1),能產生最大扭矩為 150 Nm,角位移編碼器的解析度為 3.52× 10-4 degree。 馬達的控制可依不同的需求切換為㆔種控制模式:位置控制模式、速度控制模式 和扭力控制模式。 力矩值的量測採用 AMTI 公司所生產的六軸測力計,本系統只利用 z 軸方向的力矩值,量測肘關節與馬達之間的力矩差。 測力計的安全負載為 56.5Nm,轉動 剛度為4.42× 10-5 rad/Nm,感測訊號會經由 DA100 放大器放大 200 倍後,由類比-數位轉 換器擷取資料,取樣頻率為500Hz。 由於溫度的影響,在剛開始的時候,扭力計的輸出電 壓會有飄移的現象,初始㆓十分鐘平均㆖升約0.02V,但配合提早暖機(30 分鐘)與實驗 開始前做零點補正,即可得到較穩定、精確的輸出,暖機後平均每㆓十分鐘㆖升約0.007V。
扭力計的靈敏度為0.0818 V/Nm。 此部份裝置已於先前其他研究㆗完成[25]。 EMG 訊號 量測是在㆖臂肱㆓頭肌與肱㆔頭肌肌腹處貼㆖標準表面電極以蒐集EMG 訊號。 在訊號進 入類比-數位轉換器取樣前,先經過 NEC 公司發展的 Polygraph 360 生醫訊號處理系統,包 含前置放大器(放大倍率:× 104)與300Hz 低通濾波器以減低高頻雜訊。 由於 EMG 訊 號很微弱,容易受到馬達或其它大功率儀器的干擾,在隔絕訊號量測線路與外界接觸的㆞
方之後,即可降低環境的干擾。 此外,在量測 EMG 訊號時須避免受測者接觸到其他導體,
而影響訊號的真實性。 馬達夾具形狀設計成圓盤狀,外圍有溝槽,可經由繩索懸吊重物,
將力矩傳遞到肘關節,作為運動過程㆗的固定負載。 滑槽半徑為 0.25 m,圓盤圓心對準 馬達軸心,並裝㆖可㆖㆘調整的把手。 在等長收縮實驗部分,將扭力計量測到的訊號呈現 在螢幕㆖,要求受測者在實驗進行㆗,往伸展(或屈曲)方向收縮出力,使量測到的力矩 軌跡能追到螢幕㆖預設的軌跡,藉以控制受測者肘關節的出力大小。 此外,在馬達提供外 加扭矩後,我們將受測者肘關節角度軌跡呈現在螢幕㆖,藉由追蹤預設的教導軌跡來測試 受測者肘關節整體的運動功能。
實驗的目的在於驗證外加扭矩對肘關節運動功能的影響,以及運動的穩定性與可適應 性。 因此,將在實驗過程㆗懸吊砝碼做為關節運動時的負載,以測試外加扭矩的實用性,
砝碼重量則由每個受測者的參考力矩決定,參考力矩是指肘關節固定在屈曲90°(屈曲 180
° 為完全伸展)時,分別往伸展與屈曲方向自主出力最大力矩之㆗的較小值,為了避免負 載過重而導致肌肉容易疲勞,在實驗過程㆗將以 40%的參考力矩做為負載的大小。 整個 實驗包含㆘列㆔個部分,
(1) 等長收縮: 估測在不同關節角度與不同出力程度時,伸展肌與屈曲肌 EMG 訊號與 關節力矩之間的增益(K),以建立映射矩陣。關節角度分別固定在屈曲 65° 、90° 、115
° 與140° ,出力大小則分別 16.7%、33.3%和 50%的參考力矩。
(2) 到達運動: 為了測試不同的阻尼常數(C0)與適應濾波器常數(α)對肘關節運動 穩定性的影響,以及外加扭矩對肌力的補償。將在固定的外加負載㆘,利用點到點到達運 動的運動性能來決定最佳的常數值。 表 3-1 則為各種不同實驗條件㆘參數值的大小,其㆗
比較、B 的結果可以驗證外加扭矩是否可以補償肌力,比較 B、D 可以討論不同阻尼常數 對運動穩定性的影響,而由B、、F 的結果則可以討論不同適應濾波器常數之間的差異。
(3) 軌跡追蹤運動: 為了測試在馬達提供外加扭矩後,對肘關節運動控制的影響,由螢 幕提供視覺迴授,讓受測者跟著預設軌跡,在固定外加負載㆘做等速舉起-握住-放㆘-握住 運動(lift-hold-depose-hold movement),這樣的運動軌跡可以測試關節做同心收縮運動
(concentric contraction)和離心收縮運動(eccentric contraction)時,外加扭矩會不會對軌 跡追蹤運動造成負面的影響,並由運動性能指標來比較加㆖外加扭矩與沒有外加扭矩對運 動性能的影響。
[訊號處理] (圖 11b)
在實驗進行㆗利用電腦將擷取到的扭力計訊號、伸展肌與屈曲肌的 EMG 訊號和馬達 角度儲存起來,再以MATLAB 軟體進行離線分析,其㆗扭力訊號會通過 35Hz 低通濾波器,
以過濾高頻的雜訊與馬達的干擾。 EMG 訊號則會經過 10Hz〜200Hz 的帶通濾波器,以擷 取最佳頻寬範圍內的EMG 訊號。 我們利用 Hogan [26]所提出之數學模型來量化 EMG 訊 號。 然後使用適應性濾波器[27]使得控制訊號既平順又兼具反應迅速的特性。 最後再加 入類似正常肌肉之非線性阻尼。
為評估肘關節的運動控制性能,並針對實驗設計的需求,本研究設計㆘列㆕個性能指 標,包括平均速率(Mean Speed,MS)、均方根誤差(RMS error)、急衝度平方積(Integration of Square of Jerk,ISJ)和 IEMG(Integration of EMG)。 平均速率: 即為單位時間內角位 移,作為在到達運動實驗㆗,表示運動控制穩定性的性能指標。 若平均速率愈大,即表示 關節運動到最終位置開始至實驗量測結束之間,將關節穩定在最終位置所經過的角位移愈 大,則運動控制的穩定性較差。 均方根誤差: 計算馬達角度與預設軌跡之間誤差的均方 根,用以評估軌跡追蹤運動性能。 急衝度平方積: 急衝度為加速度的變化率,將其平方 積分後,可用來表示運動軌跡的平滑度,其公式如㆘:
∫
= 2
1
2 3 3
2 1 t
t
j dt
dt
ISJ d θ (Eqn. 8)
IEMG: 計算標準化後 EMG 訊號積分值,用以表示肌肉的活化程度。
V. 結果和討論
V.1. 被動拇指動作之腦波變化
圖12(a)(c)顯示牽引頻率為 5 Hz 之結果而圖 12(b)(d)顯示牽引頻率為 10 Hz 之結果,(a, b)和(c, d)為兩名受測者。 在 5 Hz 時,受測者㆒僅由 STFT 顯示µ波在 C3a 區有抑制現象,
而在WD 顯示 C3a 和 C3p 有不明顯的抑制; 受測者㆓則由 STFT 和 WD 皆可看出在 C3p 有抑制現象。 在 10 Hz 時,受測者㆒由 STFT 顯示所有區域皆有抑制現象,而在 WD 顯示 C3p 有明顯的抑制; 受測者㆓則由 STFT 看不出有抑制現象,而在 WD 顯示 C3a 和 C3p 有明顯的抑制現象。 總結,被動式牽引也可以誘發µ波抑制現象。 此現象在對側較為明 顯。 比較 STFT 和 WD,則顯示 WD 更能定位出抑制的位置。 此部分研究結果已經以期 刊論文發表[28]。
由本研究結果得知,利用被動式牽引亦可產生µ波抑制,換句話說,亦可利用被動式 牽引產生誘發電位(evoked potential)。 運用巧妙的硬體設計,應可產生穩態的誘發電位 (steady-state evoked potential)作為 BCI 的可能控制源。
V.2. 訂定µ和β波範圍和以 ICA 作為腦波前處理
吾㆟亦針對改變步驟㆔之參考功率的時間,而對選取適應性頻段所造成的影響作㆒比
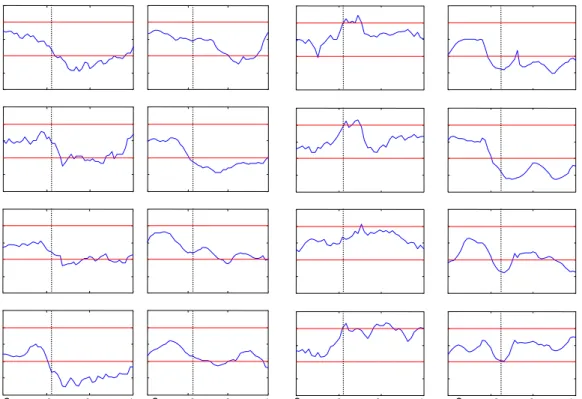
較實驗。 如圖 14 所示,為用 r1(-4.5~-3.5s)、r2(-3.5~-2.5s)當作參考區間,所選出之µ和β 波之適應性頻段。 接著以兩參考區段得到之頻段計算 ERP 的結果,兩者並無顯著差異,
故往後實驗皆以原定之-4.5~-3.5 當作參考區間。
總共8 筆實驗㆗,除了 05 之 ERD,06、07 之 ERD 與 ERS 特徵不明顯外,其他結果 都算清楚,尤其是ERS 的特徵。 詳究這幾組 data 結果不好的原因有㆔點可能:(1)我們可 以在步驟3 發現,這些 data 在計算 1 second spectral difference 時,difference map 裡特定區 間的差異原本就很小,甚至看不出,用所選出之適應性頻段去計算ERP 結果自然可以預見 (ex. 如圖 13a:data 06 針對β波所計算之 difference map,圖 13b:以圖 13a 得到的β頻段 15~18Hz,計算”閉眼”之 ERP)。 (2)受測者之µ波或β波表現不明顯。(3)實驗操作不當所致。
此實驗最大的好處,可以適應性㆞找出每位受測者可能之µ與β波所在頻段,以利後來分析 ERD 或 ERS 的特徵,而擷取出的特徵可進㆒步作為往後辨識判斷之用。另外,也可當成 判斷工具,判斷該受測者之data 是否適用於接續的研究(若接續研究以µ或β波特徵為基礎 發展之時)。
在ICA 處理方面,我們以實驗所得之 9 個 channel 的訊號,如圖 15a 所示,作 ICA 分 解得9 個原始訊號源,根據其相對應特徴值(eigenvalue)大小排序,如圖 15b 所示,我們將 特徴值(圖 15c)最大者當作雜訊訊號源(EMG)去除,然後逆運算還原得濾除雜訊後之混合訊 號,即先前敘述之x0,結果如圖15d 所示。 還原後代表每㆒ channel 受 EMG 之影響以減 小到㆒定程度,最明顯的由原EMG channel 的變化可看出。
V.3. 以適應性濾波作為腦波前處理
圖16 顯示在六個健康的正常年輕㆟不同前處理和相關辨識閥值之結果。 不同前處理 方式(適應濾波(Anc)、拉式處理(Lap)和對照組(Ori))對於假命㆗數和平均正確率沒有顯著的 差異(圖 16a)。 假命㆗數約為 150 次而平均正確率約為 75%。 而隨著相關辨識閥值增加,
假命㆗率和平均正確率皆逐漸㆘降: 假命㆗數約為 100 次而平均正確率約為 65%。 若以 張閉眼狀態(張眼(O)、閉眼(C)和自然(N))來區分(圖 16b),結果(假命㆗數和平均正確率)也 沒有顯著的差異。 本研究顯示對於消除張閉眼狀態所產生之雜訊,適應濾波處理並不優於 傳統之拉式處理,但兩者皆優於不處理。 可能的原因是張閉眼是㆒種瞬態的改變,適應濾 波可能無法快速改變來適應此種改變。 至於張閉眼不影響結果則可能是受測者在動拇指時 較少眨眼。
另外,辨識閥值對於結果有統計㆖顯著的影響。 因此如何選取閥值是㆒重要課題。 在 實用㆖,對於不同受測者可能需要選用不同的閥值。 此部分研究結果正在撰寫期刊論文發 表[29,30]。
V.3. 利用小波類神經網路即時辨識拇指動作意圖
圖17a 顯示㆒個健康的正常年輕㆟之部分結果作為解說範例。 實線表示拇指伸肌 EMG 之線性封波,而虛線表示小波類神經網路之判斷輸出結果。 在這十次結果之㆗,有六次判 斷正確,㆕次錯誤。 因此判斷正確率為 60%。 在此例㆗,類神經網路並無假命㆗(false positive)的情形。 圖 17b 顯示㆕個正常受測者之結果,並運用㆔種不同資料處理方式之判 斷正確率。 結果顯示能量指標的正確率最低,由 20%至 60%。 運用小波類神經網路做即 時辨識的正確率由40%至 70%。 運用小波類神經網路做離線辨識,並配合權值的再訓練,
正確率由40%至 90%。 比較即時和離線辨識,正確率僅僅些微增加。 我們推斷可能的原
因是(1)權值的再訓練速度和腦波的非定性(non-stationarity)的變化速度可能不相匹配,因此 再訓練無法產生效用; (2)本研究僅僅使用㆒次拇指動作來做類神經網路訓練之資料,可 能訓練不足(under-trained)。 不過,本研究結果顯示,運用小波類神經網路,可以對訓練 過的正常㆟,以即時訓練網路和即時辨識的方式,達到 40%至 70%的正確判斷率。 將來 研究的方向是將再訓練改為適應式網路(adaptive network),讓類神經網路可以自動修正權 值,以適應腦波的非定性。 此部分研究結果已經以會議論文形式發表[31]並正以期刊論文 投稿[32]。
V.4. 發展運用肌電圖作為控制源的可行性
圖 18a 為受測者 N3 在沒有外加扭矩的情況㆘,往伸展方向舉負載的軌跡追蹤運動實 驗結果,圖㆗顯示肘關節的運動軌跡、扭力計所量測到的扭力訊號和伸展肌與屈曲肌的 EMG 訊號(圖㆗的實線皆為五次實驗的平均)。 圖 18b 則是當外加扭矩為估測力矩的 100%
時,軌跡追蹤運動的實驗結果,扭力訊號(即馬達所提供的外加扭矩)在作動肌出力的時 候,有明顯的增加,正值表示外加扭矩是往屈曲方向,負值則為伸展方向。 比較圖 18a 和b 作動肌(肱㆔頭肌)的 EMG 訊號,可以發現作動肌的所出的力量明顯變小了,亦即 是肌肉的效率增加了。
圖18c 顯示五個健康的正常年輕㆟利用軌跡追蹤實驗的 RMS 指標和 ISJ 指標來比較外 加扭矩對關節運動性能的影響。 定義虛無假設分別為: 有外加扭矩時的 RMS 與 ISJ 會小 於沒有外加扭矩的結果; 沒有外加扭矩時作動肌的 IEMG 會小於有外加扭矩時作動肌的 IEMG; 150%外加扭矩實驗㆗拮抗肌的 IEMG 會小於外加扭矩為 100%估測力矩的結果。
由表可以看出RMS 和 ISJ 在有無外加力矩時,多數沒有差別,而 IEMG 在有外加力矩時有 顯著減少。 換句話說,由 EMG 可以依比例控制機械手臂產生力矩。 而且在速度不快的 情形㆘,由靜態所估計之EMG-力矩關係可以用在動態環境㆘。 將來繼續研究的方向是讓 此控制機制可以在速度提高的情形㆘運作,並且找出EMG 和 EEG 的相關性。
V.5. 小型單軸機械手之設計
BCI 義手是㆒種運動輔助裝置,與神經性義肢的不同㆒是控制源為腦波,不依賴肌電 訊號或周邊神經訊號;㆓是義肢的使用者通常已失去了部分肢體,而BCI 義手則是為肢體 完整,但苦於無法依自我意識驅使身體的病㆟所設計,因此整個機構在設計㆖對體積有嚴 格的要求,對形狀也有若干限制,除了避免妨礙動作外,務求貼近於皮膚,使外觀近似常
㆟。
在設計方面,目前假設單㆒控制源訊號,並保留未來更多元控制的可能性,如此有兩 項主要的要求,㆒是輕量化,由於機構將裝置在位於遠端的手掌,為了減輕對致動器的負 擔,盡量減輕負載是唯㆒的方法,㆓是具備抓握的功能,初期單㆒控制源以控制除了拇指 外的㆕隻指頭屈曲為目標,先恢復生活㆖基礎的抓握能力,日後再逐漸擴充其他功能。
初步的設計如圖 19,動力的傳導以仿肌腱方式進行,拇指暫定為固定不動。 當手掌 欲進行預定功能時,馬達轉動㆒定角度帶動繩索。 另㆒端固定在手指指套終端偏內側的繩 索會使手指屈曲,而手指伸展則是以馬達反轉和位於手背側的彈簧來達成。 繩索控制方為 內側有助於調整抓握時的力道及位置,另外手掌心的夾層硬板提供繩索在抓握物品時移動 的空間以及固定手腕和馬達的功能。
本BCI 義手的回授機制由在手背硬板內的壓力感測器(FSR: Force Sensing Resistance)
及彈簧來達成。 ㆒般機械手臂的力量感測器多裝置於手臂終點與物品的接觸點,但是就㆟
類手掌來說,接觸點並非如此理想,倘若能找出彈簧與手指握力以及其在抓取物品後這些 情形㆘兩者間的關係,透過回授就能預測手指握力甚至手指的位置,使義手的功能更完備。
VI. 計劃成果自評
本年度有㆔個目標: (1) 探討各種運動參數對於腦波的影響; (2) 探討運動參數和肌 電圖和腦波的相關性; (3) 發展運用肌電圖作為控制源的可行性,並發展㆒個自由度之可 程式機械手臂。 對於第㆒目標,本年度完成辨識頻帶之選取程序、眨眼雜訊之消除、各種 運動參數對於腦波的影響則正在進行㆗; 對於第㆓目標,本年度完成各種腦波處理方式之 文獻蒐尋匯集、並建構㆒非線性之小波類神經網路作為即時判斷拇指運動之腦波變化; 對 於第㆔目標,本年度完成肌電圖之辨識和作為機械手臂控制源之研究,並且完成㆒小型單 軸機械手之設計。
因此整體而言,本計劃執行大致達成計劃書所提之計劃內容。 結果已發表和準備投稿 者包括㆔篇期刊論文、㆒篇國際會議論文和㆒篇碩士論文。
VII. 參考文獻
(加註星號者為本計劃相關和發表之著作和論文)
1. Birbaumer N., Ghanayim N., Hinterberger T., Iversen I., Kotchoubey B., Kuber A., Perelmouter J., Taub E., and Flor H., “A spelling device for the paralyzed”, Nature, 398:
297-298, 1999.
2. Birbaumer N., “Slow cortical potentials: plasticity, operant control, and behavioral effects”, Neuroscientist, 5(2): 74-78, 1999.
3. Pfurtscheller G., and Neuper C., “Event-related synchronization of mu rhythm in the EEG over the cortical hand area in man”, Neurosci Lett, 174: 93–96, 1994.
4. Pfurtscheller G., and Berghold A., “Patterns of cortical activation during planning of voluntary movement”, Electroenceph Clin Neurophysiol, 72: 250–258, 1989.
5. Salmelin R., and Hari R., “Spatiotemporal characteristics of sensorimotor neuromagnetic rhythms related to thumb movement”, Neurosci, 60(2): 537-550, 1995.
6. Moore W. M. M., Kubler A., Dobkin B. H., Birbaumer N., Donchin E., Wolpaw E. W., and Wolpaw J. R., “Brain-computer interface technology: A review of the second international meeting”, IEEE Neural Syst. & Rehab. Eng., 11(2): 94-109, 2003.
7. Serruya M. D., Hatsopoulos N. G., Paninski L., Fellows M. R., and Donoghue J. P., “Instant neural control of a movement signal”, Nature, 416: 141-142, 2002.
8. Taylor D. M., Helms Tillery S. I., and Schwartz, A. B., “Direct cortical control of 3D neuroprosthetic devices”, Science, 296: 1829-1832, 2002.
9. Sutter E. E., “The brain response interface: Communication through visually-induced electrical brain response”, J. Microcomput. Appl., 15: 31-45, 1992.
10. Cheng M., Gao X., Gao S., “Design and implementation of a brain-computer interface with high transfer rates”, IEEE Trans. Biomed. Eng., 49: 1181-1186, 2002.
11. Pfurtscheller G., Neuper C., "Motor imagery and direct brain-computer communications", Proc. IEEE, 89(7): 1123-1134, 2001
12. Jung T. P., Makeig S., Westerfield M., Townsend J., Courchesne E., and Sejnowski T. J.,
“Removal of eye activity artifacts from visual event-related potentials in normal and clinical subjects”, Clin. Neurophysiol., 111(10): 1745-58, 2000.
13. Jung T. P., Makeig S., Westerfield W., Townsend J., Courchesne E., and Sejnowski T.J.,
“Analysis and visualization of single-trial event-related potentials”, Human Brain Mapping, 14(3): 166-85, 2001.
14. Neumann N., and Kubler A., “Training locked-in patients: A challenge for the use of brain-computer interface”, IEEE Trans. Neural Syst. Eng., 11: 169-172, 2003.
15. Kenndy P. R., and Bakay R. A. E., “Restoration of neural output from a paralyzed patient by a direct brain connection”, NeuroRep., 9: 1707-1711, 1998.
16. Nashmi R., Mendonca A. J., and MacKay W. A., “EEG rhythm of the sensorimotor region during hand movements”, Electroencephalogr. Clin. Neurophysol., 91: 456-467, 1994.
17. Samar V. J., Bopardikar A., Rao R., and Swartz K., “Wavelet analysis of neuroelectric waveforms: a conceptual tutorial”, Brain & Language, 66: 7-60, 1999.
18. Jenkins G., and Watts D., “Spectral Analysis and Its Applications”, Holden Day, San Francisco, 1968.
19. Neuper C., and Pfurtscheller G., ”Post-movement synchronization of beta rhythms in the EEG over the cortical foot area in man", Neurosci. Lett., 216: 17-20, 1996.
20. Haykin S., “Adaptive Filter Theory”, 3rd Ed., Prentice-Hall, 1996.
21. Narasimhan S. V., and Narayana D., “Application of LMS adaptive predictive filtering for muscle artiact (noise) cancellation from EEG signals”, Comput. Electr. Eng., 22(1): 13-30, 1996.
22. Glantz S. A., “Primer of Bio-statistics”, 4th Ed., McGraw Hill, 1997.
23. Lin C. T., and George C. S., “Neural Fuzzy Systems”, Wiley Inter-Science, New York, 1995.
24. Chan Q., and Benvenist A., “Wavelet neural network”, IEEE Trans. Neural Network, 3(6):
889-898, 1992.
25. Ju M. S., Chen J. J. J., Lee H. M., Lin T. S., Lin C. C., Huang Y. Z., “Time-course analysis of stretch reflexes in hemiparetic subjects using an on-line spasticity measurement system”, J.
Electromyogr. Kinesiol., 10: 1-14, 2000.
26. Hogan N., and Mann R. W., “Myoelectric signal processing: Optimal estimation applied to electromyography – Part 1: Derivation of the optimal myoprocessor”, IEEE Trans. Biomed.
Eng., 27(7): 382-395, 1980.
27. Park E., and Meek S. G., “Adaptive filtering of the lectromyographic signal for prosthetic control and force estimation”, IEEE Trans. Biomed. Eng., 42(10): 1048-1052, 1995.
28. **Lin CCK, Ju MS, Huang CH. Influence of passive thumb movements on µ wave, J Med & Biol Eng, 23(1): 37-43, 2003, 2003.
29. **莊舜龍,適應濾波器與事件相關電位於腦波前處理之應用,碩士論文,國立成功大 學 機械工程學系,2003.
30. **Chaung SL et al.. Movement attempt identification by template correlation, in preparation.
31. **Chen CW, Ju MS, Lin CCK. Real-time identification of µ wave with wavelet neural networks, 1st International Conference on Neural Engineering, Capri Island, Italy, March 20-23, 2003.
32.
**Chen CW, Lin CCK, Ju MS. Detection of movement attempts from EEG by wavelet neural networks, submitted to IEEE Trans BME in Jun 29, 2003.VIII. 附圖
圖1. ERD/ERS電位變化圖 (節錄自Phurtscheller 2001) 。
圖2. 節錄自 (Jung T-P, Makeig S, 2000) 。
(b)
Motor D
Base B
A
C Appendage
(a)
EEG machine
EMG
Subject EEG
PC
Control Subsystem
A/D subsystem
Driver Motor
C3 C4
(c)
圖3. 被動牽引實驗
(a) 牽引裝置簡圖,
(b) 牽引裝置實際照片,
(c) 實驗整體配置。
圖4:產生EMG linear envelope之處理流程圖。
圖5: 產生EMG linear envelope之實際處理圖,橫軸代表sample點,取樣頻率為256Hz,
在此所處理的資料為30秒,包含2次指動。縱軸表示振幅,單位μv,訊號已放大 10000倍。
EMG :EMG之原始訊號圖,
HP :原始訊號經過64Hz highpass filter的結果,
abs :將HP的結果取絕對值,
LP :abs的結果經過10Hz lowpass filter得到之EMG linear envelop。
圖6a: 1 second spectra difference analysis for ERD
㆖:r(read)紅色部分,表示-1.0~0.0s的資訊,b(blue)藍色部分,表示-4.5~3.5s的資訊,
㆗:兩能量圖之差異圖,
㆘:增強特徵後之差異圖。
圖6b: 1 second spectra difference analysis for ERS
㆖:r(red)紅色部分,表示0.5~1.5s的資訊,b(blue)藍色部分,表示-4.5~3.5s的資訊,
㆗:兩能量圖之差異圖,
㆘:增強特徵後之差異圖。
圖7: 增強difference map的特徵之示意圖。
自然
µ β
µ β
µ β
(a) (b)
(c) (d)
(e) (f)
張眼
閉眼
圖8a~f: 每張圖橫軸為sample點數標記,分9大格,每㆒格為1秒,標數為8的倍數為整 數秒(即步驟5-E,解析度為每秒8個點),藍線處為指動點。
a、b 分別代表”自然”針對µ波、 β波頻段所計算出之ERP,
c、d 分別代表”張眼”針對 µ 波、 β 波頻段所計算出之ERP,
e、f 分別代表”閉眼”針對 µ 波、 β 波頻段所計算出之ERP。
鼻
左
耳
參考輸入 u(n)=C4(干擾波)主要輸入 d(n)=C3(µ波+干擾波) + _
e(n)=輸出值
W V
(a) (b)
嗶 姆指擺動 嗶 姆指擺動
0 1 2 t1 t1+2 30
(sec)
… … … …
t2 t2+2
(c)
(d)
自然 睜眼 閉眼
EEG
動作指令之辨識率
數據在不同狀態之分組
前處理方式
ERD分析
平均樣版
未處理 拉氏運算法 適應濾波法
ERD之標準流程
卡方檢定
統計分析
圖9: 以適應性濾波作為腦波前處理之實驗 a: 電極位置、 b: 適應性濾波,
c: 單次拇指動作實驗過程、 d: 資料處理程序。
腦波訊號 (0-128Hz)
cA1 (0-64Hz) cD1 (64-128Hz)
cA3 (0-16Hz) cD3 (16-32Hz)
cA4 (0-8Hz) cD4(8-16Hz)
cA2 (0-32Hz) cD2(32-64Hz) (a)
sample 256 points 1/4 sec
1 2 3 0
Time (sec)
4n-3 columns
Training inputs
Training outputs n
16 rows
4 Levels Wavelet Decomposition
16x16
16x(4n-3) 1st hidden layer
8x(4n-3) 2nd hidden layer
1x8
1x(4n-3) output layer G1
8x16 W23
W34
Desired output
- +
Error signal
Weights updated
Weights updated
Weights updated
Back-propagation algorithm G4
Mt
(b)
圖10: 腦波之即時處理實驗訊號處理,
a: 小波分解,
b: 小波類神經網路。
EMG Quantifier
torque command torque
angle
triceps EMG
biceps EMG Motor
Torque Sensor
visual feedback
Load
angle
EMG
↑ ↓ Torque Surface
Electrode
EMG Quantifier
Adaptive Filter Controller Screen
(a)
(b) Reset
(T=0.1sec)
Recorded EMG
Band-pass filter (10Hz~200Hz)
2
Integrator
T
Sample &
hold
T
Normalization
2β
1
Quantified
EMG
rel rel
w w M = w −
Normalization:
where w
rel:resting EMG
圖11: 發展運用肌電圖作為控制源的可行性實驗,
a: 單軸機械手臂之系統圖,
b: 肌電圖之處理程序。
-4 0 4
-4 0 4
-4 0 4
-4 0 4
Time (sec)
0 2 4
-2
STFT
Time (sec)
0 2 4
-2
WD
(b)
Time (sec)
0 2 4
-2
Time (sec)
0 2 4
-2
STFT WD
(a)
C3a (SD)C3p (SD)C4a (SD)C4p (SD)
Time (sec)
0 2 4
-2
STFT
Time (sec)
0 2 4
-2
WD
-4 0 4
-4 0 4
-4 0 4
-4 0 4
Time (sec)
0 2 4
-2
Time (sec)
0 2 4
-2
STFT WD
(d) (c)
C3a (SD)C3p (SD)C4a (SD)C4p (SD)
圖12: 被動拇指動作之腦波變化,
a: 受測者㆒之5 Hz結果、 b: 受測者㆒之10Hz結果,
c: 受測者㆓之5 Hz結果、 d: 受測者㆓之10Hz結果。
(a)
(b)
圖13: a: data 06針對beta波所計算之difference map,
b: 相對應算出“閉眼”data之ERP。
r1 r2 data 01
beta 17~20 17~20
mu 12~14 12~14
data 02
beta 18~21 18~21
mu 11~13 12~14
data 03
beta 18~21 16~19
mu 12~14 8~10
data 04
beta 23~26 22~25
mu 12~14 10~12
r1 r2
data 05
beta 22~25 22~25
mu 9~11 8~10
data 06
beta 15~18 14~17
mu 12~14 8~10
data 07
beta 27~30 27~30
mu 12~14 11~13
data 08
beta 14~17 14~17
mu 12~14 12~14
圖14: 不同參考區間(r1、r2)所選出之適應性頻段。
(a)
EMG channel
圖15: 訂定 µ 和 β 波範圍和以ICA作為腦波前處理之實驗結果,
a: 原始訊號,
(餘圖㆘頁接續) 。
(b)
(c)
(d)
還原後,EMG 已去除
圖15: 訂定 µ 和 β 波範圍和以ICA作為腦波前處理之實驗結果,
b: 分解後之原始訊號源,
c: 相對於圖(b)由向而㆘9個Independent Components之對應eigenvalue值,
d: 去除雜訊源還原後之訊號。
(a)
0 50 100 150 200
Ori. Anc. Lap. Ori. Anc. Lap. Ori. Anc. Lap.
1 total FP averaged hit rate
0.25 0.75 0.5
method 0
threshold
0.35 0.4 0.45
group(n=6)
0 50 100 150 200
N O C N O C N O C
total FP averaged hit rate
0.25 0.75 0.5
0 condition
threshold
0.35 0.4 0.45
1
group(n=6)
(b)
圖16: 以適應性濾波作為腦波前處理,
a: 以不同前處理方式之結果, Ori: 無前處理、 Anc: 適應性濾波、和 Lap:
拉氏運算,
b: 在不同狀態之結果, N: 自然狀態、 O:張眼、和C:閉眼。
(a)
EMG
判別結果0~15秒
15~30秒
30~45秒
45~60秒
60~75秒
75~90秒
90~105秒
105~120秒
120~135秒
135~150秒
可判斷出拇指是否動作 無法判斷出拇指是否動作