國立臺灣大學生物資源暨農學院生物產業機電工程學系 碩士論文
Department of Bio-Industrial Mechatronics Engineering College of Bioresources and Agriculture
National Taiwan University Master Thesis
蜜蜂覓食行為監測與分析影像系統之研究 An Imaging System for the Monitoring and Analyses of
Honeybees Foraging Behavior
陳秋 Chiu Chen
指導教授:林達德 博士 Advisor: Ta-Te Lin, Ph.D.
中華民國 99 年 8 月
August, 2010
誌謝
短短兩年一下子就過去了,在這即將畢業離去的季節,人的心變得相當矛盾。
碩士班的生活非常充實,伴我們度過了無數個難忘的日子,有歡笑,有煎熬,也 有無數個看日出的早晨,經過一番掙扎,終於完成了本篇碩士論文,心裡充滿難 以言喻的喜悅與感激。首先要感謝我的指導老師林達德博士,感謝您提供了一個 這麼好的學習環境讓我們成長茁壯,更感謝您在我的大學以及研究所求學的路上 指引方向,並不時鞭策我前進,幫我們做好研究進度的控管,如果沒有您的耐心 指導,相信我的碩士生涯一定走得跌跌撞撞。再來也要感謝昆蟲系楊恩誠老師,
謝謝您提供蜜蜂給我做實驗,更感謝您的建議與指導,讓一開始不熟悉的昆蟲領 域的我到最後能夠寫出一篇關於蜜蜂的論文。還要感謝口試委員江昭皚老師的細 心斧正,以及在這最後一個階段給予我的批評指教,讓我得以成功完成此篇論文。
在論文研究期間,承蒙吳佩珊與黃琡惠兩位學姊不厭其煩的幫助,並教導我 許多關於蜜蜂的知識;還要感謝鄭宇哲學長、蔡安智學長、胡琬琳學姊在論文撰 寫以及研究方法上提供可靠的建議;感謝李桂枝小姐在購買實驗器材上常常幫我 解決問題;感謝蔣壽山學長、張恒維學長、劉子誠學長、朱倫成學長、李治緯學 長、周士棋學長在學習過程中常常幫我指點迷津;感謝楊宏農同學與吳東璋同學 與我一同走過這段歲月,在論文忙碌時常常抽空幫我解決難題;感謝學弟劉昶志、
徐嘉鴻、陳俞州這些日子以來的鼎力相助;感謝 405 實驗室所有的學長姐們、同 學們以及學弟妹們,沒有你們的陪伴,我的碩士生活一定過得非常枯燥乏味。
感謝父親母親生下我,養育我,以及從小到大的呵護與關懷,讓我有幸考上 台大,完成此篇論文;謝謝哥哥跟姊姊,你們是我從小到大的師長也是玩伴,謝 謝你們平常的關心與照顧,常常讓我覺得自己充滿了力量。
最後僅以本文獻給我最愛的家人、貼心的朋友、敬重的師長以及所有陪我長大的
摘要
本研究之目的為開發一套監測分析蜜蜂覓食行為之影像系統,並在儘量不影 響蜜蜂正常行為之前提下,長期監測、記錄與分析蜜蜂進出蜂箱的相關資訊。本 系統在硬體的建構上,使用深色不透明的壓克力板製作成系統外殼,並且使用紅 外線投光器產生穩定的光源,以取得良好之影像供後端進行影像處理。其他硬體 設備還包含蜜蜂通道設計以及 CCD 攝影機等。另外,本研究使用 Borland C++
Builder 自行開發軟體,並且搭配開源碼 OpenCV 與 libsvm 等作為系統程式共同開 發的工具。在運作時,本系統需加裝於蜂箱外部,系統內之蜜蜂通道能夠限制蜜 蜂出入蜂箱時的移動路徑,使得每次蜜蜂的進出都在攝影機的取像範圍內。在個 別蜜蜂資訊的辨識上,本研究設計一種圓形標籤貼紙黏著於蜜蜂的背上,此圓形 標籤可以透過霍爾圓轉換演算法 (Hough circle transform) 被系統程式偵測到。接 著利用標籤上的定位黑點,計算阿拉伯數字或字元符號所在的位置並將之由影像 中分割出來。偵測到的數字或字元在經過影像前處理後,再使用支持向量機 (support vector machine, SVM) 分類器之辨識以獲得標籤上的數字或字元資訊。最 後再透過本研究開發的演算法,判斷並記錄蜜蜂進出蜂箱的時間點。本系統程式 對於蜜蜂標籤的辨識率可達 97%以上,而判斷蜜蜂進出的正確率則可達到 86%以 上。
關鍵字:蜜蜂、影像處理、機器學習、光學字元辨識、支持向量機
ABSTRACT
This research has developed an imaging system for the monitoring and analyses of honeybees foraging behavior. The system can do long-term detection and monitor for the entering and leaving information of honeybees at the hive entrance under the premise of minimal influence on their normal behavior. The hardware of system are consists of shell, channels and CCD camera. System shell was made by dark opaque acrylic materials and mounted with static IR projector for robust image process. Two major software include in this research are OpenCV and libsvm, system is developed under the environment of Borland C++ Builder. For practical operation, the system must be installed and connected with the beehive, the channels within the system can normalize the movement of honeybees to make sure that each runs are under the field of view of camera. For monitoring the behavior of each honeybee, a circular label sticker with numbers or letters information is applied to this system. The region of sticker was detected by the method of Hough circle transform. One black dot is marked on sticker for normalization of numbers or letters recognition. Arabic numbers or English letters on sticker are then be identified by SVM number classifier. Finally, our proposed system can record the time information of entering and leaving of honeybees. The identification rate of the labeled sticker of the system program is above 97%, and the
Keywords: Honeybee, Image processing, Machine learning, Optical character recognition, Support vector machine.
目錄
摘要 ... i
ABSTRACT ... ii
目錄 ... iv
圖目錄 ... vi
表目錄 ... ix
第一章 緒論... 1
1.1 前言 ... 1
1.2 研究目的 ... 2
第二章 文獻探討... 3
2.1 蜜蜂與蜜蜂行為簡介 ... 3
2.2 昆蟲追蹤技術 ... 4
2.2.1 在戶外對昆蟲的觀察與記錄 ... 4
2.2.2 無線射頻識別系統 ... 6
2.2.3 其他偵測技術 ... 7
2.3 影像處理技術 ... 8
2.3.1 直方圖等化影像對比強化 ... 8
2.3.2 二值化 ...11
2.3.3 侵蝕與膨脹 ... 12
2.3.4 霍爾圓轉換 ... 14
2.4 機器學習 ... 16
2.4.1 主成份分析 (principal component analysis, PCA)... 16
2.4.2 支持向量機 (support vector machine, SVM) ... 18
2.5 光學字元辨識技術 ... 25
第三章 研究設備與方法... 27
3.1 硬體設備與軟體 ... 27
3.1.1 系統整體架構 ... 27
3.1.2 蜜蜂 ... 27
3.1.3 蜂箱 ... 28
3.1.4 影像系統外殼 ... 31
3.1.5 紅外線投光器與攝影機 ... 34
3.1.6 蜜蜂通道設計 ... 35
3.1.7 系統外觀 ... 36
3.1.8 蜜蜂標籤製作與黏貼 ... 36
3.1.9 溫溼度計 ... 38
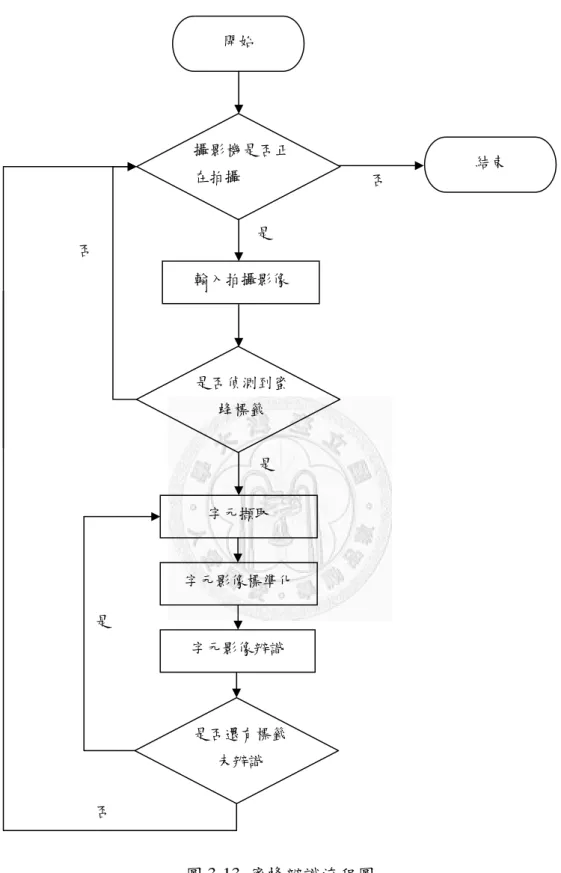
3.2.3 輸入拍攝畫面 ... 40
3.2.4 蜜蜂標籤偵測 ... 41
3.2.5 字元擷取 ... 42
3.2.6 字元影像標準化 ... 45
3.2.7 字元影像辨識 ... 46
3.3 判斷蜜蜂進出演算法 ... 49
第四章 結果與討論... 52
4.1 系統性能分析 ... 52
4.1.1 系統硬體設備 ... 52
4.1.2 系統程式 ... 54
4.1.3 標籤字元辨識 ... 57
4.1.4 判斷蜜蜂進出演算法 ... 62
4.1.5 蜜蜂偵測小型實驗 ... 64
4.2 實驗與結果分析 ... 68
4.2.1 實驗一 ... 69
4.2.2 實驗二 ... 75
4.2.3 實驗三 ... 83
4.2.4 實驗四 ... 91
4.2.5 實驗結果討論 ... 104
第五章 結論與建議... 106
5.1 結論 ... 106
5.1.1 硬體設備 ... 106
5.1.2 影像處理方法 ... 106
5.1.3 實驗結果 ... 106
5.2 建議 ... 107
參考文獻 ... 109
圖目錄
圖 2-1 RFID 的作動原理... 6
圖 2-2 RFID 系統應用於蜜蜂觀測示意圖... 7
圖 2-3 原始影像與直方圖等化後的灰階值機率密度曲線... 9
圖 2-4 直方圖等化影像處理前後之比較... 10
圖 2-5 二值化影像處理前後之比較...11
圖 2-6 二維集合 A 被 B 侵蝕 ... 13
圖 2-7 二維集合 B 對 A 進行膨脹 ... 13
圖 2-8 霍爾直線轉換示意圖... 14
圖 2-9 霍爾圓轉換示意圖... 16
圖 2-10 主成份分析... 16
圖 2-11 不同切割平面分割兩個資料族群之比較 ... 19
圖 2-12 SVM 原理示意圖 ... 20
圖 2-13 資料點映射至較高維度空間... 24
圖 2-14 一對一 SVM 樹狀圖 ... 25
圖 2-15 OCR 系統辨識流程... 25
圖 3-1 系統示意圖... 27
圖 3-2 義大利蜂... 28
圖 3-3 大蜂箱規格 (圖中單位為 mm) ... 29
圖 3-4 小蜂箱規格 (圖中單位為 mm) ... 30
圖 3-5 大蜂箱系統外殼 (圖中單位為 mm) ... 32
圖 3-6 小蜂箱系統外殼 (圖中單位為 mm) ... 33
圖 3-7 紅外線投光器... 34
圖 3-8 蜜蜂通道 (圖中單位為 mm) ... 35
圖 3-9 系統外觀... 36
圖 3-10 蜜蜂標籤貼紙... 37
圖 3-11 標籤貼紙黏貼 ... 37
圖 3-12 EL-USB-2 溫溼度計 ... 38
圖 3-13 蜜蜂辨識流程圖... 39
圖 3-14 開啟攝影機程式碼... 40
圖 3-15 標籤貼紙擷取... 42
圖 3-16 字元擷取流程... 43
圖 3-17 將標籤貼紙轉正... 44
圖 3-18 白色區塊偵測流程... 44
圖 3-19 字元影像標準化... 46
圖 3-22 判斷蜜蜂進出法則... 51
圖 4-1 系統組成外觀... 52
圖 4-2 蜜蜂通道... 53
圖 4-3 紅外線投光器與攝影機... 54
圖 4-4 系統程式一般區... 55
圖 4-5 攝影機拍攝畫面... 55
圖 4-6 系統程式參數區... 56
圖 4-7 系統程式資料分析區... 56
圖 4-8 蜜蜂偵測小型實驗 (使用阿拉伯數字標籤) ... 65
圖 4-9 阿拉伯數字標籤偵測... 65
圖 4-10 阿拉伯數字擷取... 66
圖 4-11 阿拉伯數字標籤辨識結果 ... 66
圖 4-12 蜜蜂偵測小型實驗 (使用英文字母標籤) ... 67
圖 4-13 英文字母標籤偵測... 67
圖 4-14 英文字母擷取... 68
圖 4-15 英文字母標籤辨識結果... 68
圖 4-16 大蜂箱影像系統運作圖... 69
圖 4-17 4 月 22 日蜜蜂進出蜂箱情形直方圖... 70
圖 4-18 4 月 22 日個別蜜蜂外出次數圖... 71
圖 4-19 4 月 22 日個別蜜蜂在蜂箱內外時間比例圖... 71
圖 4-20 4 月 22 日當日所有蜜蜂外出次數圖... 72
圖 4-21 第一次實驗連續 6 天之累計外出情況... 73
圖 4-22 第一次實驗每日蜜蜂偵測數量... 74
圖 4-23 蜜蜂單次外出時間長度之數量比例以及迴歸分析 (第一次實驗) ... 74
圖 4-24 蜜蜂單日外出次數分布圖 (第一次實驗) ... 75
圖 4-25 5 月 15 日編號 0 到 49 之蜜蜂進出蜂箱情形直方圖... 76
圖 4-26 5 月 15 日編號 50 到 99 之蜜蜂進出蜂箱情形直方圖... 77
圖 4-27 5 月 15 日個別蜜蜂外出次數圖... 78
圖 4-28 5 月 15 日個別蜜蜂在蜂箱內外時間比例圖... 78
圖 4-29 5 月 15 日所有蜜蜂外出次數圖... 79
圖 4-30 第二次實驗連續 9 天之累計外出情況... 79
圖 4-31 第二次實驗每日蜜蜂偵測數量... 80
圖 4-32 5 月 14 日到 22 日台北氣象資訊... 81
圖 4-33 蜜蜂單次外出時間長度之數量比例以及迴歸分析(第二次實驗) ... 82
圖 4-34 蜜蜂單日外出次數分佈圖 (第二次實驗) ... 83
圖 4-35 小蜂箱系統運作圖... 83
圖 4-36 6 月 4 日編號 0 到 49 之蜜蜂進出蜂箱情形直方圖... 85
圖 4-37 6 月 4 日編號 50 到 99 之蜜蜂進出蜂箱情形直方圖... 86
圖 4-38 6 月 4 日個別蜜蜂外出次數圖... 87
圖 4-39 6 月 4 日個別蜜蜂在蜂箱內外時間比例圖... 87
圖 4-40 6 月 4 日所有蜜蜂外出次數圖... 88
圖 4-41 第三次實驗連續 22 天之累計外出情況... 88
圖 4-42 第三次實驗每日蜜蜂偵測數量... 89
圖 4-43 6 月 1 日到 22 日台北氣象資訊... 90
圖 4-44 蜜蜂單次外出時間長度之數量比例以及回歸分析 (第三次實驗) ... 91
圖 4-45 蜜蜂單日外出次數分佈圖 (第三次實驗) ... 91
圖 4- 46 7 月 18 日編號 AA 到 BZ 之蜜蜂進出蜂箱情形直方圖 (剛羽化蜜蜂組) . 93 圖 4-47 7 月 18 日編號 CA 到 DZ 之蜜蜂進出蜂箱情形直方圖 (剛羽化蜜蜂組) .. 94
圖 4-48 7 月 11 日編號 EA 到 FZ 之蜜蜂進出蜂箱情形直方圖 (隨機蜜蜂組) ... 95
圖 4-49 7 月 11 日編號 GA 到 HZ 之蜜蜂進出蜂箱情形直方圖 (隨機蜜蜂組) ... 96
圖 4-50 7 月 18 日個別蜜蜂外出次數圖 (剛羽化蜜蜂組) ... 97
圖 4-51 7 月 11 日個別蜜蜂外出次數圖 (隨機蜜蜂組) ... 97
圖 4- 52 7 月 18 日個別蜜蜂在蜂箱內外時間比例圖 (剛羽化蜜蜂組) ... 98
圖 4-53 7 月 11 日個別蜜蜂在蜂箱內外時間比例圖 (隨機蜜蜂組) ... 98
圖 4-54 7 月 18 日所有蜜蜂外出次數圖 (剛羽化蜜蜂組) ... 99
圖 4-55 7 月 11 日所有蜜蜂外出次數圖 (隨機蜜蜂組) ... 99
圖 4-56 第四次實驗連續 17 天之累計外出情況 (隨機蜜蜂組) ... 100
圖 4-57 第四次實驗每日蜜蜂偵測數量 (隨機蜜蜂組) ... 100
圖 4-58 第四次實驗連續 23 天之累計外出情況 (剛羽化蜜蜂組) ... 101
圖 4-59 第四次實驗每日蜜蜂偵測數量 (剛羽化蜜蜂組) ... 101
圖 4-60 7 月 9 日到 31 日台北氣象資訊... 102
圖 4- 61 蜜蜂單次外出時間長度之數量比例以及迴歸分析 (第四次實驗) ... 103
圖 4-62 蜜蜂單日外出次數分佈圖 (第四次實驗) ... 104
表目錄
表 4-1 數字標籤使用 linear 核函數辨識結果... 57
表 4-2 數字標籤使用 RBF 核函數辨識結果 ... 58
表 4-3 英文字母標籤使用 linear 核函數辨識結果... 58
表 4-4 英文字母標籤使用 RBF 核函數辨識結果 ... 59
表 4-5 英文字母標籤使用10 10× 區塊特徵辨識結果 ... 59
表 4-6 英文字母標籤使用5 5× 區塊特徵辨識結果... 60
表 4-7 英文字母標籤使用 4 4× 區塊特徵辨識結果 ... 60
表 4-8 英文字母標籤使用 20 個主成份特徵辨識結果... 61
表 4-9 英文字母標籤使用 30 個主成份特徵辨識結果... 61
表 4-10 英文字母標籤使用 50 個主成份特徵辨識結果... 62
表 4-11 蜜蜂通過蜂道正確判斷率 ... 63
表 4-12 蜜蜂回頭正確判斷率... 64
表 4- 13 台北氣象資訊... 72
第一章 緒論
1.1 前言
蜜蜂是一種會飛行的社會性昆蟲,屬膜翅目,蜜蜂科,體長約為 13-15 mm (張,
1998),一般蜂巢中的蜜蜂可以分為:女王蜂、雄蜂以及工蜂。蜜蜂在農業上扮演 著非常重要的角色,全球大部分的農作地區,都是依靠蜜蜂來幫助作物傳授花粉,
然而,人類對於蜜蜂的了解卻還十分有限。
自 1994 年以來,許多國家,包括美國大部分地區、瑞士、加拿大、奧地利、
德國、西班牙甚至亞洲地區,皆發現神秘的蜜蜂大量消失事件,又名為「蜂群衰 竭失調現象」 (colony collapse disorder, CCD) (Diagnose-Funk, 2007)。蜜蜂莫名的 消失不僅對蜂蜜市場造成衝擊,更會嚴重影響全球的農業發展,因此蜜蜂議題逐 漸受到重視。同時,蜜蜂是一種社會性昆蟲,它們的社會分工非常細,增加對於 社會性生物行為之了解,在管理學以及社會學領域上,都具有非常重要的學術價 值。例如在蜜蜂覓食過程中,有些蜜蜂會先去尋找食物來源,而有些則在蜂巢等 待尋找的結果並慢慢跟進,這樣的機制是否最為有效率,而這些先去尋找食物的 蜜蜂是否可以解釋為人類中那些喜歡冒險的人 (Check, 2006)。只要能夠對蜜蜂的 行為多一些了解,就會更接近這些問題的解答,因此,了解蜜蜂的行為變得非常 重要。
過去,研究人員對於蜜蜂的觀察大多由人工方式進行,然而這樣的方式,不但 消耗人力,也難以達到長時間的追蹤紀錄;再者,由於肉眼幾乎無法分辨蜜蜂的 個體,因此很難對其做個別的觀察。所以,開發一套能夠自動監測與分析蜜蜂行 為之系統,使其能夠應用於蜜蜂的各項研究上,包括蜜蜂單日外出覓食的頻率、
量測不同季節蜜蜂的壽命或是用於尋找「蜂群衰竭失調現象」的原因等,在學術
1.2 研究目的
過去對於自動監測蜜蜂行為系統的相關研究中,成效最好的是利用被動式無線 射頻識別 (radio frequency identification, RFID) 系統,其使用微型的被動式標籤黏 貼於蜜蜂背部,並搭配一 RFID 讀取器來解讀標籤上的資訊 (Streit et al., 2003),藉 此偵測並記錄蜜蜂進出蜂箱的時間,以達到分析蜜蜂覓食行為之目的。然而,RFID 標籤的重量約為 2.5 毫克重,而一隻成熟的蜜蜂平均重量約為 70 毫克重,標籤的 重量約佔蜜蜂體重的 3.6%;再者,被動式 RFID 標籤的驅動電源,來自讀取器發 出強電磁波所產生的感應電流,而稍重的標籤以及電磁波等不確定的因素皆可能 對蜜蜂的正常行為造成影響,因此需要一種對蜜蜂影響較小的監測系統。
近年來影像辨識技術的發展越來越成熟,其中包含光學字元識別 (optical character recognition, OCR)、人臉辨識以及一些幾何圖形辨識等,並且已成功地應 用在許多商品上,這些成熟的技術發展提供了監測蜜蜂行為另一個可行的方法。
相較於 RFID,影像辨識技術有很多優點,其系統設備非常簡單,只需一套標籤貼 紙 (用以黏貼在蜜蜂背部) 以及用以擷取影像之拍攝設備;而且其對蜜蜂行為的影 響較小,由於標籤貼紙僅約 1.0 毫克重,比起 RFID 標籤相對輕了許多,並且沒有 電磁波等不確定因素的影響。基於上述偵測與分析蜜蜂行為的重要性,本研究之 目的為建立一套監測蜜蜂覓食行為之影像系統,藉以分析個別與群體蜜蜂在短時 間及長時間之行為。
為達到此研究目的,主要的研究工作條列如下:
1. 設計與製作適用於蜂箱的取像系統。
2. 開發具有即時處理影像與辨識蜜蜂標籤的影像處理方法。
3. 進行影像系統之整合與性能測試。
4. 進行蜜蜂覓食行為之基礎實驗並分析其結果,以驗證系統的可用性。
第二章 文獻探討
2.1 蜜蜂與蜜蜂行為簡介
蜜蜂是一種會飛行的社會性昆蟲,屬膜翅目,蜜蜂科,學名為 Apis mellifera,
體長約為 13-15 mm,其身體構造可分為頭、胸、腹三個部分。頭部包含有有觸角、
複眼、單眼以及口器等,其中觸角長在頭的前上方,主要功能是聞味道;複眼長 在頭的兩側,由很多小眼睛集合而成;單眼共有三個,成三角形排列在兩複眼之 間;口器則可以用來咀嚼食物、咬開巢房蓋以及吸取花蜜。胸部則包含前胸、中 胸以及後胸等三節,每節上有一對足,分別為前足、中足與後足;工蜂前足上有 觸角清潔器,可供清理觸角之用;而在中胸和後胸上各有一對翅。腹部亦由數節 構成,包含蠟腺開口及螫針等。螫針為產卵管,後方連有毒囊,同屬自衛武器 (張,
1998)。
蜂巢中的蜜蜂可以分為女王蜂、雄蜂以及工蜂。女王蜂是整個蜂群中唯一生 殖器官發育完全的雌蜂,主要負責產卵,除了分封 (當蜂巢有新女王蜂誕生,此時 老女王蜂會帶領一部分蜂群另覓新巢) 以外,一般不會離開蜂巢,壽命約 3 到 5 年。另外,女王蜂分泌的蜂王質,能夠穩定蜂群的情緒,亦可抑制工蜂之卵巢發 育及分封,使蜂群保持安定狀態。雄蜂是由未受精卵發育而成,完全不從事生產,
其唯一的任務是與蜂王交配,數量約數百到上千隻,壽命約數個月。工蜂是生殖 器官發育不完全的雌蜂,負責產卵以外所有巢內及巢外的工作,一般蜂巢中約有 數萬隻工蜂,其壽命在採集季約為 45 天 (Adjare, 1990;余與孟,2001)。
整個蜂群中,工蜂負責了所有巢內外的工作,剛羽化的幼蜂在前 3 天負責清 理蜂巢,3 到 5 天後開始餵食剛羽化的幼蜂,接著 5 到 12 天負責照料女王蜂,12 到 18 天後開始泌蠟並建築蜂巢,接著當任守衛蜂的工作一直到第 21 天,工蜂在
集花粉跟花蜜等食物。然而這些發育程序並非固定不變的,而會透過環境的改變 進行加速或者延緩 (Adjare, 1990)。
蜜蜂的覓食行為常常被認為是邁向社會化的主要因素,它們能夠透過舞蹈、
費洛蒙、聲音和振動等方式傳遞訊息。其中最特別的行為便是它們的舞蹈,覓食 回來的工蜂,會在蜂巢的垂直面做 8 字型的舞蹈,來告知其他工蜂相關的覓食資 訊,包括食物來源的距離與方向,以及食物所蘊含的量等。Visscher 與 Seeley (1982) 在蜂巢附近觀察蜜蜂的舞蹈並對應其食物來源的位置,試圖找出蜜蜂的覓食策 略。另外,蜜蜂能夠藉由費洛蒙來區分異己,以及用來警告或招喚同伴。另外,
蜜蜂會依照蜂群的狀態隨時發出不同的聲音與振動 (Wilson, 2006)。
2.2 昆蟲追蹤技術
2.2.1 在戶外對昆蟲的觀察與記錄 (一) 視覺方法
最簡單的視覺方法,即是直接使用肉眼或借用雙目鏡等裝置來觀察對象昆 蟲,並且攜帶一般手提式的記錄裝置 (如筆記型電腦) 來記錄資料,最後再搭配上 一些套裝軟體,即可達到資料分析之目的。即使到了夜晚等光線不足的情況,只 要讓觀察者戴上夜視鏡,再搭配上一些夜間照明裝置,就能夠達到如同白天一樣 的觀察 (Wyatt, 1997)。
(二) 一般攝影機影像技術
對一般戶外的觀察而言,使用攝影機拍攝影像的主要問題在於:觀察對象跟 攝影機裝置的距離在超過數公尺後很難捕捉其影像,因此要對影像作辨識就顯得 更難了。基於此,大部分戶外的影像觀察技術都是使用一些容器,使其能夠限制 住昆蟲,讓它們維持在特定的區間,因此我們才能有效的控制感測距離,以達到 最佳的辨識效果 (Riley, 1994)。
而在夜間照明上,使用近紅外光源 (750 nm-900 nm) 的效果最佳,因為大部 份昆蟲看不到此波段的光譜,因此不會擾亂昆蟲的行為 (Riley, 1994)。另外還有一 些其他照明方式 (如螢光粉),也常常應用在觀察昆蟲上 (David et al., 1983)。
目前也有許多關於昆蟲的觀察研究建立在立體影像上,其使用兩台數位攝影 機,將它們精確的對齊,用以拍攝飛行中的昆蟲,透過後端電腦的處理分析,即 可得到這些昆蟲飛行的軌跡,進而得知它們運動的相關資訊。Ikawa 等人 (1994) 使用三台同步攝影機拍攝飛行中的蚊子,並在蚊子身上做記號,再運用一種複雜 的概率模型 (probabilistic model) 重建它們的運動軌跡。
(三) 紅外線熱影像技術
在能見度低的情況下,比如在有煙霧或灰塵的環境中時,一般的攝影機影像 並不適用,這種情況可以利用昆蟲本身所發出的長波紅外線 (熱) 來觀察他們的行 為,只是這類的感測器的解析度相對顯得較低。現在一般常用來做一些非侵入式 的偵測,如偵測大樓中的白蟻蟲害等 (Reynolds and Riley, 2002)。
(四) 光學感測技術
一般光學感測裝置,只要搭配上一些昆蟲陷阱裝置限制住昆蟲的移動空間,
就能夠用來觀察記錄昆蟲的進出時間,其原理為昆蟲移動時會阻斷光學感測裝置 所發的光束,因此藉由分析這些光束阻斷的時間就能達到記錄之目的 (Hendricks, 1989)。這樣的裝置其實可以運用在觀察蜜蜂上,他們設計一些蜜蜂通道,使得每 隻蜜蜂都能夠正常的通過通道,並在每個通道上設置一個紅外線發射器,以及兩 個接收器,因此只要透過判斷兩個接收器收到訊號的時間,就能夠知道蜜蜂是離 開還是進去蜂箱,藉此就能夠了解蜜蜂在蜂箱內外的活動力 (Hobbs and Hodges, 1993)。
2.2.2 無線射頻識別系統
無線射頻識別是一種無線識別技術,透過微晶片標籤 (tag),可將資訊連結至 後端資料庫裡,以供資料分析使用。最早的應用出現在第二次世界大戰期間,當 時英國空軍使用 RFID 偵測並確認前往機場的飛機是否為己方,其使用的就是長距 離主動式的 RFID,即使現在,飛機的航安系統仍使用 RFID 做識別。接著在 1970 年代,美國政府透過 Los Alamos 科學實驗室將 RFID 技術轉移到民間。幾年後,
美國與歐洲的幾家公司便開始著手生產 RFID 標籤,今日,RFID 技術已經被廣泛 地應用於各個領域。
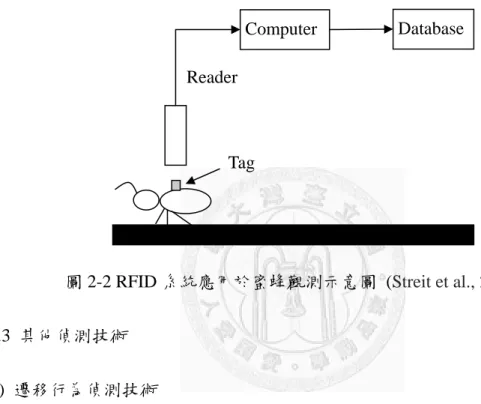
RFID的作動原理如圖 2-1 所示,其系統主要包括標籤、讀取器 (reader)、和 電腦主機。標籤是存放資料的元件,讀取器則是從標籤讀取資料或將資料存放到 標籤內的工具,並將所讀取資料傳送至電腦系統中,最後電腦處理後端的資料庫。
當標籤感應到讀取器所發射的無線電波時,會產生感應磁場,使標籤內建的射頻 發射機模組與微處理機溝通,而將標籤內的資訊傳回讀取器,讀取器 再透過 RS-232、USB或其他通訊方式將資料傳至電腦主機端 (Juels, 2006)。
圖 2-1 RFID 的作動原理 (甘,2009)
一般RFID的標籤主要可區分為主動式 (active) 與被動式 (passive) 兩種,主動 式標籤內含電池,能夠隨時傳送訊息給讀取器,並有較長的通訊距離,可儲存較 大的記憶體;被動式標籤電源來自讀取器所發出電波對標籤產生感應微電流來供
電腦主機
射頻模組 微處理器
射頻模組 微處理器 EEPROM 通訊
射頻能量
讀寫資料 感應磁場
Reader
Tag
應其電源動力,再利用電波將其資訊傳回讀取器,故通訊距離較短。被動式標籤 的優點在於不需外加電池,因此體積較小、價格較便宜以及壽命較長。
Streit 等人 (2003) 使用微型被動式的 RFID Tag 黏貼於蜜蜂背部,並搭配一讀
取器來解讀標籤上的資訊,如圖 2-2 所示。藉此系統可以觀測到蜜蜂往來蜂箱的 行為,並且可以從中分析得到蜜蜂外出覓食的資訊。圖 2-2 RFID 系統應用於蜜蜂觀測示意圖 (Streit et al., 2003) 2.2.3 其他偵測技術
(一) 遷移行為偵測技術
一些遷移性高的物種,借由偵測其棲息地雨量以及植被等環境因數,能夠得 到它們在棲息地分佈的相關資訊。另外植被的品質、地面溫度、雨量以及土壤含 水率等因素也常常用來指示蝗蟲與夜蛾等昆蟲是否會出現遷移的行為 (Riley, 1989)。因此雖然衛星遠端感測裝置無法用來偵測個別的昆蟲,但是卻能夠偵測記 錄其棲息地的各項環境因數。另外還有一些使用空照的方式,在小型飛行載具上 裝上無線傳輸攝影機,這樣就能即時得到很多地面上的資訊 (Everitt et al., 1996)。
(二) 聲波偵測技術
Computer Database Reader
Tag
做一些更深入的研究。然而這類的裝置對環境中的訊雜比 (signal-to-noise ratio) 非 常敏感,另外還必須考慮訊號在介質中傳遞時的變形以及衰減。
其它還有一些高頻聲波檢測裝置常用來調查大氣層較低部分的結構,以及風 在垂直與水平方向的成份,因此這類裝置能夠補充一些昆蟲在遷移時的氣象資訊 (Riley et al., 1995)。
2.3 影像處理技術
影像,一般指的是一個平面的圖,因此可將之視為一個二維訊號 f(x, y) (其中 x 與 y 分別對應此平面座標的兩個座標軸),而 f(x, y) 的值即是點 (x, y) 的灰階值。
近年來,隨著計算機技術與數位訊號處理技術的爆炸性發展,人們可以藉由 攝影機擷取環境中的圖像,並將之轉化為數位訊號,而運用計算機來處理這些訊 號,此為影像處理技術的起源。至今,影像處理技術漸漸成為一門獨立的學科,
並且已經非常成熟,其應用的範圍也很廣,從單純的影像修改,到一些複雜的機 器視覺都能見到它的影子,其中有一些很常見的應用技巧,如:直方圖等化 (histogram equalization)、二值化 (threshold)、形態學 (morphology) 以及霍爾圓轉 換 (Hough circle transform) 等,由於與本論文較相關,以下將對這些方法作基本 的介紹。
2.3.1 直方圖等化影像對比強化
直方圖等化是一種常用來強化影像對比的技巧。對於大部分的影像,其灰階 直方圖可能如圖2-3 (a) 所示呈現不規則分佈。而直方圖等化,即是希望透過灰階 值轉換,改變原始影像的直方圖分佈,使影像中任意灰階值出現的機率都一樣,
以達到最佳的顯示效果。根據數學推導 (Gonzalez and Woods, 2008),可以得到:
0
( ) 255
r j j
s T r n
MN =
= =
∑
(2.1)其中:
r :原始影像的灰階,其值從0到255
s:為其轉換過後的灰階,其值亦從0到255 M :影像的高度
N :影像的寬度
n :原始影像中灰階值 j 出現的次數 j
圖2-3 原始影像與直方圖等化後的灰階值機率密度曲線,(a) 原始影像的灰階值機 率密度曲線,(b) 經過直方圖等化過後的灰階值機率密度曲線
圖 2-3 中,(a) 為原始影像的灰階值機率密度曲線,(b) 為經過直方圖等化過 後的灰階值機率密度曲線,其中 pr(r)為原始灰階值 r 的機率密度函數,ps(s)為等化 過後灰階值 s 的機率密度函數。在圖 2-4 中,以蜜蜂在通道中的影像為例,說明直 方圖等化處理之效果,(a) 為原始影像,(b) 則為經過等化處理的影像,(c)為原始 影像的直方圖,(d)為經過等化處理的直方圖。從圖中可以看到,原始影像比較暗,
其灰階值普遍偏低,但經過直方圖等化處理後解決了此問題,其影像整體亮度提 高了很多,並強化了影像之對比。
r pr(r)
0 A
255 s
ps(s)
0 255
1/255
(a) (b)
圖2-4 直方圖等化影像處理前後之比較,(a) 原始影像,(b) 經過等化處理的影像,
(c) 原始影像的直方圖,(d) 經過等化處理的直方圖
一般的直方圖等化雖然能夠得到不錯的結果,但往往會改變處理前後影像的 平均灰階值, Kim (1997) 提出了一個雙直方圖等化方法解決此問題。其作法為先 計算整張影像之平均灰階值,接著將影像依照灰階值大小分成兩個子影像,其中 一個子影像的灰階值小於或等於原始影像之平均灰階值,而另一個則大於原始影 像之平均灰階值,接著對這兩個子影像分別做直方圖等化,最後再將它們合併並 得到影像強化的結果。
(a) (b)
(c) (d)
2.3.2 二值化
二值化處理是將一張影像的灰階值轉換為0 (黑) 跟255 (白) 兩種灰階,所使用 的 是 一 個 簡 單 判 斷 機 制 , 對 於 任 意 灰 階 值 r , 如 果 其 大 於 我 們 所 預 設 閾 值 (threshold),則令 r = 255,反之令 r = 0。將影像二值化主要的優點在於,由於影像 不是黑就是白,所以方便我們應用形態學對影像做更進階的處理。如圖2-5中,以 蜜蜂的影像而言,二值化處理可以簡單地將蜜蜂之輪廓顯示出來 (圖2-5 (a) 為原 始影像,2-5 (b) 為二值化後的影像,其中閾值設定為50)。
圖2-5 二值化影像處理前後之比較,(a) 原始影像,(b) 二值化後的影像 一般的二值化處理需要使用者手動設定閾值,因此如何選擇適合的閾值便成 為一個問題,Otsu (1979) 提出自動決定閾值的方法解決此問題。其基本想法為找 到一個最佳的閾值,使得每個灰階值在經過二值化處理後能有最小的平均誤差,
換句話說,此方法將原始影像分為兩個子影像,並且讓這兩個子影像有最大的組 間變異
σ
B2,其定義為:2 2 2
1( 1 ) 2( 2 )
B P m mG P m mG
σ
= − + − (2.2)(a) (b)
其中:
P1:第一組 (灰階值小於等於閾值) 子影像出現的機率 m1:第一組子影像平均灰階值
m :整張影像之平均灰階值 G
P2:第二組 (灰階值大於閾值) 子影像出現的機率 m2:第二組子影像平均灰階值
根據數學推導,公式 (2.2) 可以改寫成:
2
2 2 1
1 2 1 2
1 1
( )
( )
(1 )
G B
m P m P P m m
P P
σ
= − = −− (2.3)
為了找出最佳的閾值,將所有的灰階值 (0到255) 當成閾值,並計算其組間變 異
σ
B2,接著找出最大σ
B2所對應的灰階值,此灰階值即為最佳閾值 (Otsu, 1979)。2.3.3 侵蝕與膨脹
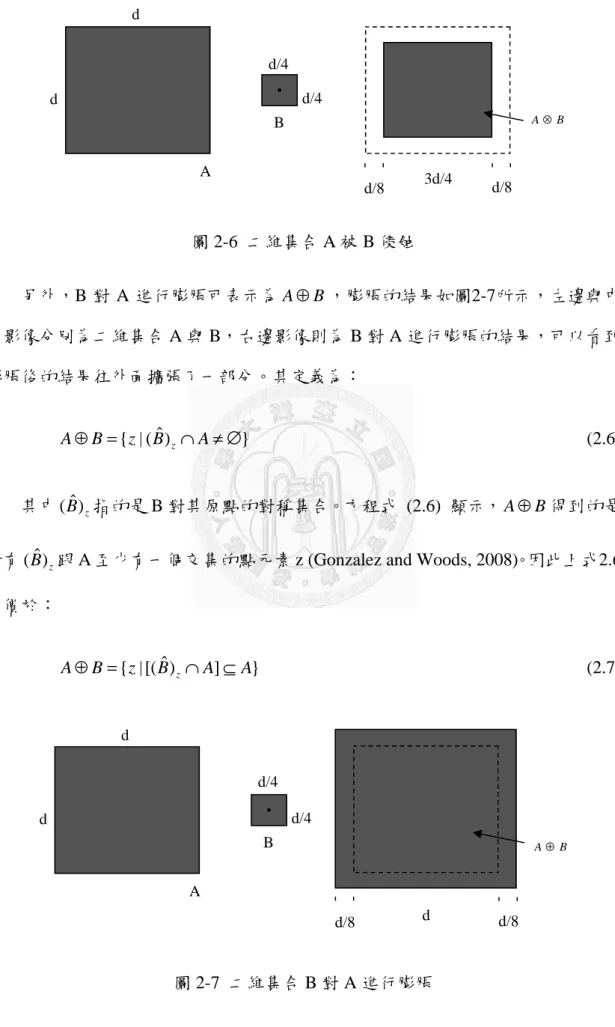
侵蝕與膨脹是形態學中常用的兩種技巧,首先定義二維集合 A 與二維集合 B 其中 A 被 B 侵蝕可表示為A⊗B,侵蝕的結果如圖2-6所示,左邊與中間影像分別 為二維集合 A 與 B,右邊影像則為 A 被 B 侵蝕的結果,可以看到被侵蝕後的結果 往內部縮了一部分。其定義為:
{ | ( )z }
A⊗ =B z B ⊆ A (2.4) 方程式 (2.4) 顯示,A⊗B所得到的是所有 B 包含在 A 裡面的點元素 z,因為 B 必須包含在 A 裡面,表示 B 跟 A 的背景部份完全沒有重疊,因此上式2.4等價於:
{ | ( )z c }
A⊗ =B z B ∩A = ∅ (2.5) 其中A 表示 A 的背景部份,c ∅則表示空集合。
圖 2-6 二維集合 A 被 B 侵蝕
另外,B 對 A 進行膨脹可表示為A⊕B,膨脹的結果如圖2-7所示,左邊與中 間影像分別為二維集合 A 與 B,右邊影像則為 B 對 A 進行膨脹的結果,可以看到 膨脹後的結果往外面擴張了一部分。其定義為:
{ | ( )ˆ z }
A⊕ =B z B ∩ ≠ ∅ A (2.6)
其中 ˆ( )B 指的是 B 對其原點的對稱集合。方程式 (2.6) 顯示,z A⊕B得到的是
所有 ˆ( )B 跟 A 至少有一個交集的點元素 z (Gonzalez and Woods, 2008)。因此上式2.6z 等價於:
{ | [( )ˆ z ] }
A⊕ =B z B ∩A ⊆A (2.7)
d
d
d/4 d/4
A
B
d/8 d d/8
A⊕B
d
d
d/4 d/4
A
B A⊗B
d/8 3d/4 d/8
2.3.4 霍爾圓轉換
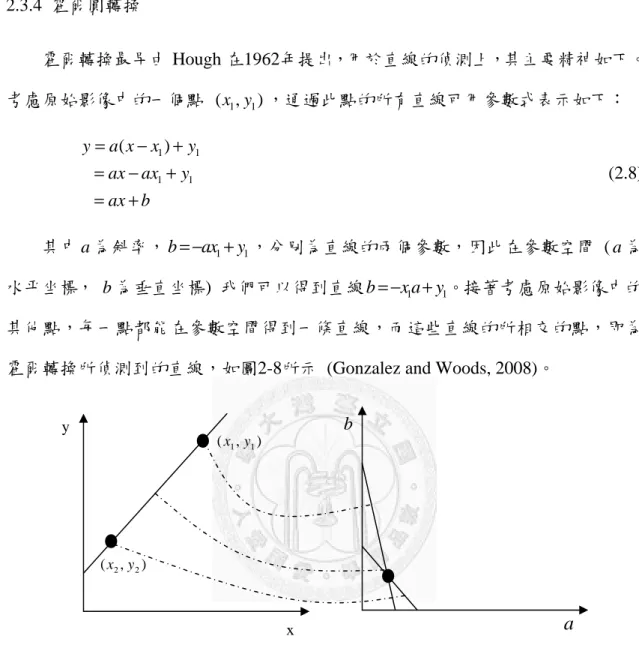
霍爾轉換最早由 Hough 在1962年提出,用於直線的偵測上,其主要精神如下。
考慮原始影像中的一個點 ( ,x y1 1),通過此點的所有直線可用參數式表示如下:
1 1
1 1
( )
y a x x y ax ax y ax b
= − +
= − +
= +
(2.8)
其中a為斜率,b= − + ,分別為直線的兩個參數,因此在參數空間 (ax1 y1 a為 水平坐標, b為垂直坐標) 我們可以得到直線b= − + 。接著考慮原始影像中的x a y1 1 其他點,每一點都能在參數空間得到一條直線,而這些直線的所相交的點,即為 霍爾轉換所偵測到的直線,如圖2-8所示 (Gonzalez and Woods, 2008)。
圖 2-8 霍爾直線轉換示意圖
上式 (2.8) 中,若斜率a的值無限大,則在計算上造成不便,以致無法使用,
此時需要將原本的直線使用另一種參數表示:
cos sin
x
θ
+yθ
= r (2.9) 其中θ 為極坐標中的角度,r 為半徑。使用三角函數的特性能夠將運算量控制 在限定的角度內 (一般使用-90°到90°),並解決斜率無限大的問題 (Duda and Hart, 1972)。x
y b
a
1 1
(x y, )
2 2
(x ,y )
在一個二維座標系中,一般圓的公式可以表示為:
2 2 2
(x a− ) + −(y b) = r (2.10) 其中a與b分別表示圓心的x與 y 座標, r 則是圓的半徑。因此若將之轉換到 參數空間,則有a、b以及 r 三個參數,故上述半徑為 r 的圓,其方程式亦可表示 成:
(a−x)2+ −(b y)2 = r2 (2.11) 所以想要偵測影像中的圓,我們必須建立一個三維的累加器 ( , , )A a b r ,在檢測 過程中,考慮影像中每一個點 ( , )x y ,若其代入圓方程式中,使得
2 2 2
(a−x) + −(b y) − ≤ r
ξ
(2.12) 其中ξ
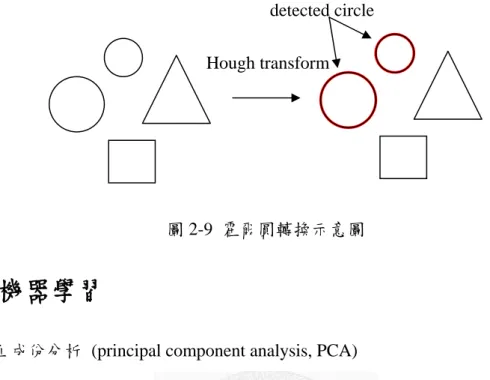
為允許的誤差值,則其對應的累加器數值加1,最後再將累加器做閾值 運算,並挑選出所有大於此閾值的圓參數,此即為霍爾圓轉換在影像上找出的圓。然而三維空間的運算量非常大,若我們直接使用上述霍爾圓轉換對影像進行 偵測,不但需要建立龐大的三維累加器,在運算上更是非常的耗時與不便。Kimme 等人 (1975) 提出 Hough gradient method 解決此問題,其主要步驟如下。
1. 首先對原始影像進行邊緣偵測,在偵測到的邊緣影像中,計算所有白點的區域 梯度。
2. 接著所有白點沿著其梯度方向,在設定的半徑範圍之間,其對應的累加器數值 加一,在此同時,這些白點也會被記錄下來。
3. 找到的圓心必須先符合兩個條件,i) 其累加器數值大於設定閾值,ii) 並且大 於周圍其它累加器
圖 2-9 霍爾圓轉換示意圖
2.4 機器學習
2.4.1 主成份分析 (principal component analysis, PCA)
主成份分析利用統計方法將原變數空間藉由線性轉換,轉換至較低維度的變數 空間,並表現出原始資料最大的資訊量,藉此可以用較小的變數維度對資料進行 壓縮,並增加運算的速度;除此之外,較小維度中的資料於分析與使用上也較方 便,可去除多餘無用的資訊,其原理如下。
對於一組在R 空間的資料x,我們想要找到一個線性轉移矩陣d w,使得x在經 過轉移後能保留最多的資訊量。在圖2-10中,以R2空間為例,假如我們找到一個線 性轉移矩陣w,將原始資料投影至其對應的一維直線上。
圖 2-10 主成份分析 Hough transform
detected circle
則這些投影過後的資料x′可以表示如下:
x′ = +m ae (2.13)
其中m為原始資料的平均,e為一維直線的單位向量,a為x在一維直線上的 投影量,其值為:
( )
a=e x mt − (2.14) 如前面所述,這些資料在經過轉移後能保留最多的資訊量,換句話說,投影 後的資料跟原始資料有著最小的均方誤差J,表示如下:
2
1
( ) ( )
n
k k
k
J e m a e x
=
=
∑
+ − (2.15) 化簡後可以得到:2 2
2
1 1 1
2
2 2
1 1 1
2 2
1 1
2
1 1
( ) 2 ( )
2
[ ( )]
( )( )
n n n
t
k k k k
k k k
n n n
k k k
k k k
n n
t
k k
k k
n n
t t
k k k
k k
J e a e a e x m x m
a a x m
e x m x m
e x m x m e x m
= = =
= = =
= =
= =
= − − + −
= − + −
= − − + −
= − − − + −
∑ ∑ ∑
∑ ∑ ∑
∑ ∑
∑ ∑
(2.16)
其中
1
( )( )
n
t
k k
k
x m x m
=
− −
∑
便是散佈矩陣S,因此方程式 (2.16) 可以改寫成:
2
1
( )
n t
k k
J e e Se x m
=
= − +
∑
− (2.17) 由於2
1 n
k k
x m
=
∑
− 並非e的函數,因此要求 ( )J e 的最小值,等同於求e Se 的最大t 值,並且因為 e =1,故我們使用Lagrange乘數法來求e Se 的最大值,並定義t u如 下:其中λ 為乘數,對e偏微分可以得到:
2 2 u Se e
e
λ
∂ = −
∂ (2.19) 接著讓偏微分結果等於0就能得到:
Se=λe (2.20) 也就是說e為散佈矩陣S的特徵向量,同時特徵值越大之特徵向量能夠使得 e Se 越大,因此最大特徵值所對應之特徵向量便是我們所求的t e。
同樣的想法將之延伸,若我們將原始資料 (R ) 投影到d d′空間 (d′小於d),
則方程式 (2.13) 可以改寫成:
1 d
i i i
x m a e
′
=
′ = +
∑
(2.21) 接著同樣解最小均方誤差J如下:2
1 1
( ) ( )
n d
ki i k
k i
J e m a e x
′
= =
=
∑
+∑
− (2.22)同樣使用Lagrange乘數法推導 (Duda et al., 2001),我們可以得到所求的
1,..., d
e e ′皆為散佈矩陣S的特徵向量,它們的特徵值由大排到小,而方程式 (2.21) 中的x′便是資料x的主要成分。
2.4.2 支持向量機 (support vector machine, SVM)
在處理某些資料的時候,我們常常需要將它們依照不同的特性進行分類,這 時通常需要透過一些機器學習的方法來達到分類之目的,而 SVM 便是其中的一種 分類演算法。它在解決資料樣本數量稀少、非線性以及高維度的分類問題上有很 大的優勢,發展至今已經非常成熟,並且被廣泛應用於光學字元辨識 (Ashwin and Sastry, 2002; Shanthi and Duraiswamy, 2009)、人臉 (Guo et al., 2001) 以及性別辨識
(Walavalkar et al., 2003) 等多種分類問題上。以下將對 SVM 的原理做一些基本的 介紹。
對於一群位在R 空間中的資料點,希望能夠在該空間中找出一個切割平面,d 可以將這群資料點依照族群的不同切割成A跟B兩群,A群組的資料點均位於此切 割平面的其中一側,B族群資料點位則於切割平面的另一側。比較圖 2-11 (a) 以及 (b),可以發現圖 (a) 所找出的切割線 (實線),其對應的兩條與資料點相切的切割 線 (虛線),彼此之間距離較近。而圖 (b) 所找出的兩條切割線 (虛線),彼此之間 距離較大,因而具有較大的邊緣 (margin)。由於我們希望可以找出將兩群資料點 分得較開的切割線,因此我們認為圖 (b) 所找出的是比較好的切割線。基於此原 理,SVM希望可以找到一個切割平面,使得兩組資料有著最大的邊緣。
圖 2-11 不同切割平面分割兩個資料族群之比較,(a) 邊緣較小的切割線,(b) 邊緣 較大的切割線
如圖 2-12 所示,對於一堆點集合{ , }x y ,其中i i x 位於i R 空間,d yi∈ + − ,( 1, 1) SVM 希望可以找到一條直線 ( )f x =w x bt − 使得所有yi = − 的點位在 ( ) 01 f x < 這
(a) (b)
邊,相反的,yi = + 的點位在 ( ) 01 f x > 這邊。另外,兩條與資料點相切的虛線H1與 H2分別表示如下:
1: t
H y=w x b+ +
δ
(2.23)2: t
H y=w x b+ −
δ
(2.24)圖 2-12 SVM 原理示意圖
接著調整它們的大小,將方程式 (2.23) 與 (2.24) 乘上某個常數使得δ 等於 1,因此上述方程式可改寫為:
1: t 1
H y=w x b+ + (2.25)
2: t 1
H y=w x b+ − (2.26)
H1與H2到直線 ( )f x 的距離則分別為:
1
1 1
H
b b
d w w
= + − = (2.27)
2
1 1
H
b b
d w w
= − − = (2.28)
Origin
Margin H1
H2
w
b w
−
故邊緣的大小為
1 2
2
H H
d d
+ = w ,因此邊緣要越大, w 就必須要越小。另外,
由於方程式 (2.25) 與 (2.26) 為δ 經過調整後的結果,故所有資料點一定會符合條 件:
(
t)
1 0y w x bi − − ≥ (2.29) 綜合上述結果,我們可以將目標函式敘述如下:
minimize 1 2
2 w (2.30) subject to y w x bi
(
t − − ≥)
1 0 (2.31)而這便是SVM主要需要解決的問題,然而上述問題在資料本身維度很高的情況 下,會變得非常複雜, 基於上述原因,我們利用Lagrange乘數法將方程式 (2.30) 與 (2.31) 改寫如下:
2
1
( , , ) 1 ( ) 1 2
N
t
i i
i
L w b a w
α
y w x b=
⎡ ⎤
= −
∑
⎣ + − ⎦ (2.32) 其中α 為Lagrange乘數,接著對w偏微:1
0
N i i i i
w
α
y x=
−
∑
= (2.33) 移項後可得:1 N
i i i i
w
α
y x=
=
∑
(2.34)再來對b偏微:
1
0
N i i i
α
y=
∑
= (2.35)最後將方程式 (2.34) 與 (2.35) 代回 (2.32),則可將目標函式敘述如下:
maximize:
1 1 1
1 2
N N N
t
D i i j i j i j
i i j
L
α α α
y y x x= = =
=
∑
−∑∑
(2.36)subject to:
1
0
N i i i
α
y=
∑
= (2.37)
α
i > 0 (2.38) 此問題中,需要求解的變數為α
i,其數量等於資料量,因此與資料維度無關。另外方程式 (2.34) 顯示,w是由資料中所有
α
i > 的0 x 所組成,而這些iα
i > 的資0 料點x 則被稱作支持向量 (support vector)。 i若我們將原始資料經由不同的投射函式 ( )
φ
x 投射到高維度空間,則方程式 (2.36) 中的x xit j則可改寫成φ
( ) (xi tφ
xj),以放射型 (radial based function, RBF ) 為 例,原始的 ( )φ
x 是一個非常複雜的函式,但內積後的結果φ
( ) (xi tφ
xj)卻意外的簡單:2
( , ) ( ) ( ) exp 2
2
i j
t
i j i j
x x k x x
φ
xφ
xσ
⎛− − ⎞
⎜ ⎟
= = ⎜ ⎟
⎝ ⎠
(2.39)
其中 ( , )k x xi j 便是SVM中的核函數 (kernel),另外常用的核函數還包含線性
(linear) 以及多項式 (poly) 等,線性核函數便是最原始的x xit j,而多項式核函數 則可以表示如下:
( ,i j) ( ) (i t j) (1 it j)d
k x x =
φ
xφ
x = +x x (2.40)以上討論的都是資料可分隔的情況,但實際應用上,情況通常都非常複雜,
以致無法將資料完全分隔,此時必須再導入一個誤差項
ξ
,允許資料點有犯錯空 間。因此方程式 (2.29) 可以改寫成:(
t)
1 0y w x bi − − + ≥
ξ
(2.41)雖然允許資料點有犯錯空間,但是我們還是希望
ξ
的值越小越好,否則就失去 了上面限制條件的意義了,因此必須給這些犯錯的資料一些懲罰,讓它多付出一 些代價 ( cost ),其定義如下:1 N
i i
cost c
ξ
=
=
∑
(2.42) 因此可以得到一個新的目標函數:minimize 2
1
1 2
N i i
w c
ξ
=
+
∑
(2.43) subject to y w x bi(
t − − + ≥)
1ξ
i 0 (2.44)i 0
ξ
≥ (2.45)重 新 使 用 Lagrange乘數法改寫並進一步推導後 (Suykens and Vandewalle, 1999;台大資工系通訊與多媒體實驗室,2010) 可得新的目標函式:
maximize:
1 1 1
1 2
N N N
t
D i i j i j i j
i i j
L
α α α
y y x x= = =
=
∑
−∑∑
(2.46)subject to:
1
0
N i i i
α
y=
∑
= (2.47)0<
α
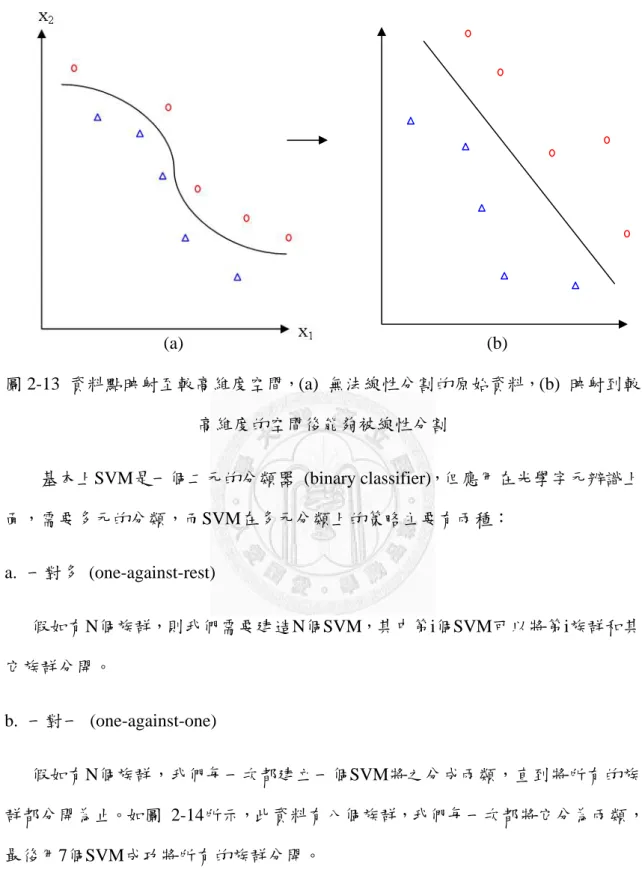
i < c (2.48) 根據資料點在Rd空間中的分佈情形,主要可以將之分成三種情況:線性可分 割、線性不可分割以及非線性可分割。其中線性可分割以及線性不可分割等都可 由SVM及其他線性分類演算法輕易得到很好的結果,但非線性可分割卻不是一個 容易解決的問題,而SVM提供了一個很好的方法。在圖2-13 (a) 中,原始的資料點 無法由線性分割,但是將其資料點映射到較高維度的空間時,就變成線性可分割 的情況,如圖2-13 (b) 所示。圖 2-13 資料點映射至較高維度空間,(a) 無法線性分割的原始資料,(b) 映射到較 高維度的空間後能夠被線性分割
基本上SVM是一個二元的分類器 (binary classifier),但應用在光學字元辨識上 面,需要多元的分類,而SVM在多元分類上的策略主要有兩種:
a. 一對多 (one-against-rest)
假如有N個族群,則我們需要建造N個SVM,其中第i個SVM可以將第i族群和其 它族群分開。
b. 一對一 (one-against-one)
假如有N個族群,我們每一次都建立一個SVM將之分成兩類,直到將所有的族 群都分開為止。如圖 2-14所示,此資料有八個族群,我們每一次都將它分為兩類,
最後用7個SVM成功將所有的族群分開。
(a) (b)
圖 2-14 一對一 SVM 樹狀圖
2.5 光學字元辨識技術
光學字元辨識技術大約從1950年代開始發展,到目前其發展已經相當成熟,
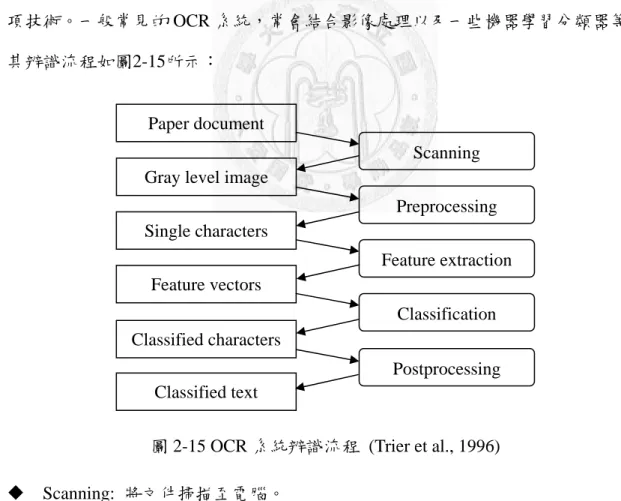
並且在市面上可以見到很多相關產品,可說是圖形辨識領域中,最成功應用的一 項技術。一般常見的 OCR 系統,常會結合影像處理以及一些機器學習分類器等,
其辨識流程如圖2-15所示:
圖 2-15 OCR 系統辨識流程 (Trier et al., 1996)
Scanning: 將文件掃描至電腦。
Preprocessing: 對掃描進的影像進行前處理,其中包含直方圖等化、二值化、
字元切割以及其他一些影像處理程序。
Paper document
Single characters Gray level image
Classified characters Feature vectors
Classified text
Feature extraction Scanning Preprocessing
Classification Postprocessing
Classification: 使用分類器對字元進行分類辨識。
Postprocessing: 考慮字句意思或文法等對辨識出來的字元進行驗證。
其中,特徵擷取在 OCR 技術上扮演著相當重要的角色,其擷取方法包含:模 板匹配 (template matching)、可變形的模板匹配 (deformable templates)、影像單一 轉 換 (unitary image transforms) 、 圖 形 描 述 (graph description) 、 投 影 直 方 圖 (projection histograms)、輪廓外形 (contour profiles)、區塊化 (zoning) 以及其它一 些幾何特徵描述等。
模板匹配:對每個字元建立一個模板,接著將待辨識的字元與所有的模板進 行比對並計算其距離,最後可以得到一個距離最近的模板,其所代表的字元 即為辨識結果。
可變形的模板匹配:將影像轉化成骨架形式,再進行模板匹配。
影像單一轉換:一般模板匹配是把影像中所有的圖像點當作特徵進行比對,
而影像單一轉換是將影像進行轉換,減少影像特徵的維度。
圖形描述:先將待辨識字元轉換成骨架的形式,接著再將其字元的線段長度、
圓圈數量等,作為其圖形描述的特徵。
投影直方圖:將待辨識字元依照水平以及垂直方向做投影,並將得到的兩個 投影結果當作特徵。
輪廓外形:將待辨識字元的輪廓外形當作特徵。
區塊化:將待辨識字元分成m n× 個區塊,並計算每個區塊內的平均值,並以 此當做特徵。
另外,同樣的特徵擷取方法,只需要做些微的調整,就能夠應用在許多不同 類型的影像上,如一般灰階影像、二值化影像、字元輪廓外形以及字元骨架等圖 形 (Trier et al., 1996)。
第三章 研究設備與方法
3.1 硬體設備與軟體
本系統建立在一般市售蜂箱之外,硬體方面主要包括蜜蜂通道、USB CCD 攝 影機與紅外線投光器以及作為後端處理應用的電腦。主要使用軟體為 Borland C++
Builder 6.0,另外還有開放源程式碼 (Open source code) OpenCV 1.0以及 libsvm v2.89。而用於後端進行資料處理的電腦,其規格為 Intel® Core(TM) 2 Duo 2.1GHz 與 4.0 GB RAM,作業系統為 Microsoft® Windows Vista SP2.
3.1.1 系統整體架構
如圖 3-1,攝影機架設在蜜蜂通道的上方,藉由紅外線投光器產生的穩定光 源,攝影機能夠拍攝到光線強度穩定的影像並傳送至電腦,最後再由電腦進行各 種運算處理,辨識蜜蜂背上的標籤並記錄其出入蜂箱的狀況。
圖 3-1 系統示意圖
電腦
攝影機
蜜蜂通道 紅外線投光器
標籤
系統外殼 蜂箱
3.1.2 蜜蜂
本研究觀察監測的對象蜜蜂為義大利蜂,為西方蜜蜂的一個亞種,學名為Apis mellifera ligustica,體長約13到15mm,背上有黃褐色絨毛,腹部有黃黑相間的色帶,
如圖3-2所示,其中 (a) 為女王蜂, (b) 為雄蜂,(c) 為工蜂,另外 (d) 為在蜂箱 出入口之蜜蜂。本研究的義大利蜂由台灣大學昆蟲學系楊恩誠老師的昆蟲神經生 物學研究室所飼養提供。
圖 3-2 義大利蜂,(a) 女王蜂,(b) 雄蜂,(c) 工蜂,(d) 在蜂箱出入口之蜜蜂 3.1.3 蜂箱
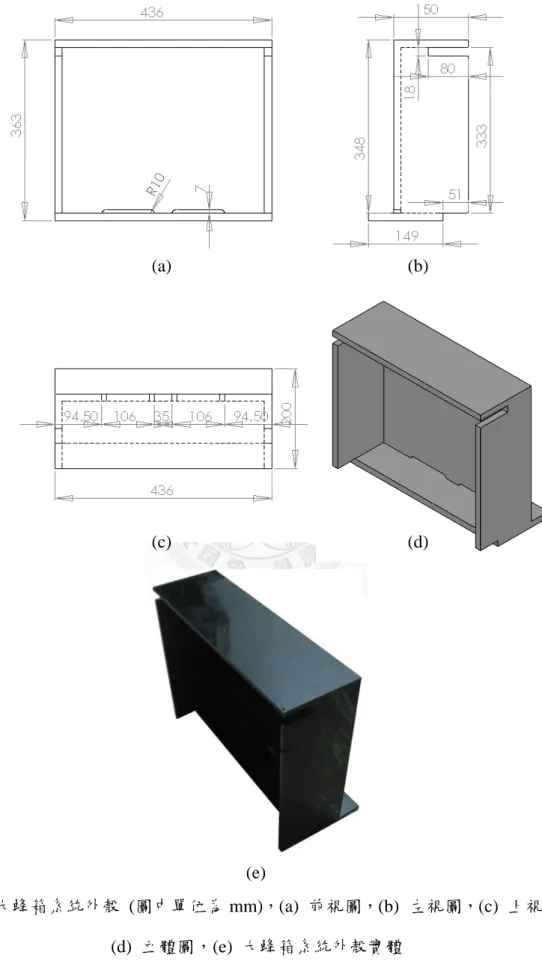
本研究共使用大小兩種常見的市售蜂箱,均由台灣大學昆蟲學系楊恩誠老師 的昆蟲神經生物學研究室所提供,其由木頭所製。圖3-3為大蜂箱,底下有兩個出 口可供蜜蜂出入,其中 (a) 到 (d) 分別為前視圖、左視圖、上視圖以及三維立體
(a) (b) (c)
(d)
圖,另外 (e) 與 (f) 則分為大蜂箱實際的外觀以及內部情形。大蜂箱內部有6片巢 片,每片約有3000隻蜜蜂,故整個蜂箱約有18000隻蜜蜂。
圖 3-3 大蜂箱規格 (圖中單位為 mm),(a) 前視圖,(b) 左視圖,(c) 上視圖,
(a) (b)
(c) (d)
(e) (f)
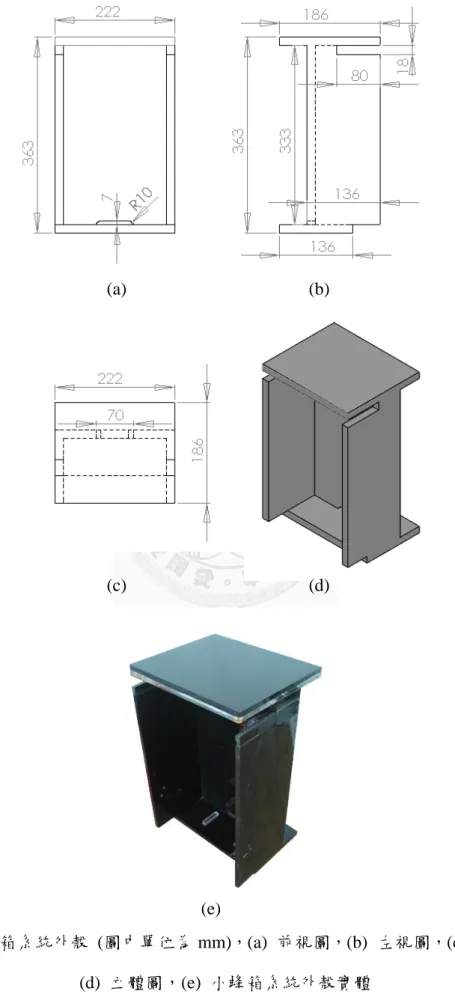
圖3-4為另一型式的小蜂箱,底下只有一個出口提供蜜蜂進出。其中圖 (a) 到 (f) 同樣分別為前視圖、左視圖、上視圖、三維立體圖、實際外觀圖以及小蜂箱的 內部情形。內部有4片巢片,每片約有3000隻蜜蜂,故整個蜂箱約有12000隻蜜蜂。
圖 3-4 小蜂箱規格 (圖中單位為 mm),(a) 前視圖,(b) 左視圖,(c) 上視圖,
(d) 立體圖,(e) 實際蜂箱,(f) 小蜂箱內部
(a) (b)
(c) (d)
(e) (f)
3.1.4 影像系統外殼
由於影像辨識系統對於光源的強弱非常敏感,而解決此問題最佳的方法即是 隔絕外界的光源,並另外在系統內部架設投光器產生穩定光源,使得系統程式在 進行影像處理時能保有高度的穩定性。因此本影像系統主要使用8 mm 厚之黑色不 透明壓克力板作為系統外殼之建構材質。然而外殼最上層的建構材質為8 mm 厚之 透明壓克力板,選用原因如下:在初步的測試中發現,當本系統外殼實際裝置在 蜂箱中時,由於外殼完全不透光,故沒辦法得知系統的裝置是否妥當,因此將外 殼最上層的部分更換為透明材質是必要的。另外,由於本影像系統外殼最上層為 透明材質,故當系統裝置完成後,需在外殼的頂端再放置一塊不透光材質使其能 夠擋住外界光源。圖3-5為大蜂箱之影像系統外殼,裝置在大蜂箱出口測,其中圖 (a) 到 (e) 分別為前視圖、左視圖、上視圖、三維立體圖形以及外殼實際的外觀圖。
圖3-6則為小蜂箱之影像系統外殼,裝置在小蜂箱上,其中圖 (a) 到 (e) 同樣分別 為前視圖、左視圖、上視圖、三維立體圖形以及外殼實際的外觀圖。
圖 3-5 大蜂箱系統外殼 (圖中單位為 mm),(a) 前視圖,(b) 左視圖,(c) 上視圖,
(d) 立體圖,(e) 大蜂箱系統外殼實體
(a) (b)
(c) (d)
(e)
圖 3-6 小蜂箱系統外殼 (圖中單位為 mm),(a) 前視圖,(b) 左視圖,(c) 上視圖,
(a) (b)
(c) (d)
(e)
3.1.5 紅外線投光器與攝影機
本影像系統須對蜜蜂作長時間連續的觀測與記錄,因而在光源選用上多了一 些考量,若使用一般可見光為光源,則可能影響蜜蜂在夜間的正常行為,為了減 少對它們的影響,本影像系統採用紅外線投光器 (850 nm-940 nm),因為蜜蜂看不 見此波段的投射光線 (Riley, 1994),因此可將影響降至最低。在規格方面,本系統 使用佳皇科技公司 (佳皇科技公司,台北) 出產的紅外線投光器 (940 nm),其共 有12顆以及18顆兩種封裝 (圖3-7),供應電源為12 V 的直流電。
圖 3-7 紅外線投光器,(a) 12 顆封裝,(b) 18 顆封裝
另外,一般網路攝影機對於移動中的物體很難對其進行完整的捕捉,因為當 物體在移動時很容易在影像上留下殘影。因此本研究使用德國映美精有限公司 (The Imaging Source Europe GmbH, Germany) 出產的工業級 USB CCD 攝影機,藉 由縮短攝影機的快門時間,可清楚拍攝到蜜蜂快速移動時的影像。攝影機型號為 DMK31AU03,其規格為1/3吋 CCD 感測晶片,1024 768× 畫素,並且每秒鐘可接 收30張畫面。另外,攝影機搭配的鏡頭其型號為 ML-0614,焦距為6 mm。另外,
根據蜂箱所在的位置不同,攝影機與電腦需要透過 USB 訊號加強線來延長連接距 離,本系統使用的訊號加強線其型號為 ST-UCEXT50,連接距離為5公尺,並且最 多可同時串接5條訊號加強線。
(b) (a)
3.1.6 蜜蜂通道設計
在本影像系統中,蜜蜂通道的主要功用為限制蜜蜂往來蜂箱的移動方向以及 速度,使得攝影機拍攝到的影像較為清晰而且容易辨識,讓後端的影像處理系統 更為穩定。在製作上,需要注意通道的尺寸大小,尺寸太大之通道其限制蜜蜂移 動的效果低弱,而尺寸太小又會讓蜜蜂無法通過,因此在設計上需要取得一個平 衡。本系統在通道製作上,使用材質為 3 mm 的透明壓克力板,通道整體外觀長度 約為 145 mm,寬度約為 80 mm,高度約為 9 mm,中間限制蜜蜂移動的部分,長 度約為 35 mm,寬度約為 8 mm,高度約為 6 mm,如圖 3-8 所示,其中圖 (a) 到 (e) 分別為前視圖、左視圖、上視圖、三維立體圖形以及蜜蜂通道實體圖。
圖 3-8 蜜蜂通道 (圖中單位為 mm),(a) 前視圖,(b) 左視圖,(c) 上視圖,
(a) (b)
(c) (d)
(e)