影像辨識計算金瓜寮溪魚類數目之研究
Using Pattern Recognition in Counting Fish Numbers
in Jin-Gua-Liao River
國立台灣大學 生物環境系統工程學研究所 教授張 文 亮
Wen-lian Chang
國立台灣大學 生物環境系統工程學研究所 研究助理蕭 友 晉*
Yo-jin Shiau
國立台灣大學 生物環境系統工程學研究所 碩士班研究生虞 淨 卉
Ching-hui Yu
﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏摘 要
本研究以台北縣金瓜寮溪為試驗場址,計算水域中魚類數量,調查其水文水質 等物理化學因子,藉由影像辨識技術的觀察評估魚群數目,探討魚隻數量的估算受 水質水文之影響。 研究結果發現,在五個採樣點中,魚隻的數量變化隨著水溫升高以及溶氧的降 低而下降。由於採樣點流速都在亞臨界流範圍,因此魚隻數量與流速並無明顯相關 性,然而影像辨識的正確率隨著採樣點的流速增加而漸漸降低,正確率依序為: 50.40%、61.50%、50.80%、50.40%及 48.40%。 金瓜寮溪的水文水質狀況幾乎沒有明顯變化,而魚類魚通量(單位時間單位體積 魚隻數量)變化卻在水域中呈現不規則的數量變化,數據依序為:0.482 隻/秒 · m3、 0.850 隻/秒 · m3、1.586 隻/秒 · m3、4.023 隻/秒 · m3及 2.155 隻/秒 · m3。 關鍵詞:影像辨識,生物監測。ABSTRACT
The experiment counts the fish number by using the image process technology and investigates the water quality, physical factors and chemical factors, in the nature river in Jin-Gua-Liao in Taipei County. The experiment discusses the relationship between the fish number and the water quality.
The experiment result shows that, in the five sampling spots, the fish numbers decreased with the water temperature increased or the Dissolved Oxygen (DO) decreased. The velocity in the five spots are all below the range of Sub-critical Flow, so the fish
農業工程學報 第 56 卷第 1 期 Journal of Taiwan Agricultural Engineering 中華民國 98 年 3 月出版 Vol. 56, No. 1, March 2010
︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴
number do not have significant relationship with the velocity in this experiment. However, the accuracy of the image recognition system decreased when the velocity increased as follows: 50.40%, 61.50%, 50.80%, 50.40% and 48.40%.
There is no significant change of the water quality in different places of the river. However, the fish numbers in different places are irregular. The results are: 0.482 fish/sec ·
m3, 0.850 fish/sec · m3, 1.586 fish/sec · m3, 4.023 fish/sec · m3 and 2.155 fish/sec · m3.
Keywords: Image processing, Ecological monitoring.
﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏﹏
一、緒 論
估算魚類生態族群的方式可以分為非目視 法及目視法兩類。其中非目視法包含:手釣(hook and line)、刺網(gill)、魚籠(baited fish trap)、標示 放流(mark and recapture)、炸魚(explosives)、毒魚 (ichthyoids)、電魚(electro-fishing)、聲納(sonar) 等;目視法則包含:手寫(hand writing)、錄音(audio recording device) 、 錄 影 (video device) 、 照 相 (photography)等(邵等,1993)。 然而非目視法的魚隻估算,較具有侵入性, 對 於 保 育 類 生 物 族 群 數 量 的 調 查 可 能 傷 及 生 物,傳統目視法又耗費時間與人力,因此有待進 一步改良,以解決舊式方法在應用上的瓶頸與困 難。 機器視覺在近年來應用愈趨廣泛,加上資訊 科技的進步,使得人類以計算的速度大幅提升, 成為可以期待的困難方案。在生態研究上,利用 「 照 片 辨 識 法 」 來 鑑 別 座 頭 鯨 (Megaptera novaeangliae)。利用對座頭鯨尾鰭拍攝建立資料 庫,替代傳統捉放法的標記物,作為追蹤族群移 動的方式,以及了解他們在同一棲息地所滯留的 時間(Katona et al., 1979、Katona, 1989)。阿拉斯 加州東南沿岸,同樣也曾以照片辨識法加上林肯 -彼特森指數對其區域內之座頭鯨進行豐量推 估(Baker et al., 1992)。 以一容器裝載魚苗,並以穩定光源拍攝魚苗 垂直正攝影影像,結果在沒有任何外在環境光線 干擾的設計下,電腦計算的魚隻數量準確率可以 達到 99% (林宜弘,1995)。利用類神經網路建立 魚類數量計算辨識系統,用來計算室內養殖池的 魚苗數量,在沒有魚隻重疊的狀況下最佳的辨識 效果可以達到 94% (Newbury et al., 1995)。在室 內實驗利用養殖池進行靜態的魚隻數量計算,將 池底劃以網格後,隨機選取部份網格計算之後, 並使用方區取樣法推估全部魚隻總數,正確率可 以達到 97%至 99% (Chatain et al., 1996)。 也有學者使用攝影機對金魚(Cyprinus Auratus) 進行行為監測。利用雙鏡頭架設在魚缸頂端與側 面,對魚缸中的金魚以影像處理系統得知其移動 路徑與方向(Kato et al., 1996)。此外,當體色不 易辨識的斑馬魚(Danio rerio)彼此之間重疊率為 49.6%,辨識率是 85.3% (Kato et al., 2004)。 利用混合高斯模式進行魚隻數量辨識,在室 內以一水族魚缸,拍攝其三種不同魚群密度的動 態影像,並且另外設計三種不同的水體濁度進行 辨識,以了解水體環境改變對於系統正確率的辨 識影響程度。每種實驗一段影片為十分鐘影像, 共計三段,用以計算其平均正確率。結果發現對 於不同體長大小的魚隻,混合高斯模式辨識正確 率皆能維持於 60%以上。而水中濁度超過 15 NTU,魚隻的辨識正確率會低於 50% (蕭、張, 2006)。 溪流魚類的棲息環境,主要被河川水量,水 質,以及河川型態三個特點所影響,除了水量豐 富水質良好以外,河川棲地的多樣性提供魚類自 由活動的屏障,使魚隻不易滅絕(葉,1997)。由 於生物選擇棲息往往會選擇在與其體表有相似 色彩的環境之下,藉由保護色的機制來避免掠食 者的威脅,而保護色的機制卻也導致影像辨識較 ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴ ︴
易產生誤差,因此魚類的影像辨識大多都在實驗 室進行,尚無野外現地影像辨識的前人文獻。故 本研究的目的,在使用影像辨識法於實際的野外 應用,並了解水域魚類數量與環境因子關係。
二、理論與模式
電子計算機自 1970 年後開始發展,使得人 類計算事物的速度大幅提升,透過機器替代人為 分類辨識技術日趨成熟,對於人類的影像識別以 及物體移動的追蹤,透過統計理論建立許多辨識 模型。1986 年灰階的影像處理理論被提出,透過 此 方 法 , 可 以 加 強 灰 階 影 像 輪 廓 的 清 晰 度 (Sternberg, 1986)。 後有學者將欲辨識物體的電腦影像建立其 色階分布(color distribution),之後利用此色階分 布比較所有未知影像上每個“像素點”(pixel), 即 可 以 將 所 欲 辨 識 的 物 體 影 像 與 背 景 分 離 出 來,並更進一步作為追蹤定位物體影像的方式 (Hunke and Waivel, 1994)。當物體受光線影響為固定沒有色階差異的 狀況下,單一的高斯分布就足夠對物體建立模 式,但是在室外的自然環境中,背景常受到光影 變化、雲層影響等因素造成忽亮忽暗的色階差 異,故將多個高斯分布混合同時用以建立背景影 像,較易逼近所欲辨識的結果。因此在室外的環 境,將背景影像建立成混合高斯分布模式,可以 更有效將前景背景分離,追蹤前景物體移動變化 (Stauffer and Grimson, 2000)。
假設空間中每個像素點的 RGB (Red, Green, Blue)色階隨時間的變化可以視為多個高斯分布 之合成,則依據混合高斯分布理論,對於任意時 間點 t+1,任意像素點的色階數值之機率,可表 示如下:
( )
1 , ,(
1 , ,)
1 , , n t i t i t t i t i t i P + ω G + = =∑
x x μ ∑ ... (1) 其中( )
t 1 P x+ 為時間點 t+1 像素點xt+1所成之機率 1 t+ x 為時間點 t+1 之像素點數值 , i t ω 為時間點 t+1 第 i 個高斯函數之權重係數 , i t μ 為時間點 t+1 第 i 個高斯函數之平均值 , i t ∑ 為時間點 t+1 第 i 個高斯函數之相關係數(
)
, 1, ,, , i t t i t i t G x+ μ ∑ 為第 i 個高斯分布的機率密 度函數。 為了簡化電腦運算負擔,假設高斯分布之共 分散量為零,且變異量皆相等,即 2 i=σpp I ∑ (Stauffer and Grimson, 1999)。其中 2 pp σ 為高斯分布之平均變異量,即: 2 1 2 2 2 3 pp rr gg bb σ = ⎡⎣σ +σ +σ ⎤⎦ ...(2) 自然環境隨著時間改變,背景的顏色也會因 此漸漸變化,因此混合高斯分布所建立的背景模 式需要隨時間改變依照一定的權重ωi t, 進行修 正。此權重的計算公式如下:
(
)
( )
, 1 1 , , i t i t Mi t ω + = −α ω +α ...(3) 其中α 為學習速率,用來修正背景高斯函數,使 其能適應隨時間變化的光影。 , i t M 為樣本與母體高斯分布關聯之布林值 (Boolean)。當Mi t, = ,即表示1 xt+1屬於背景第 i 個高斯分布為真,反之xt+1不屬於背景第 i 個高 斯分布時Mi t, = 。 0 判斷任何一個未知的像素點是否屬於背景 影像所呈現的色階分佈,可將此未知像素點判斷 1 t+ x 分別代入混合高斯模式中,比較其是否超過 所假設的超越機率。當任意點 xi機率大於所設定 之超越機率時,則表示此像素點不屬於背景分佈 (Duda et al., 2001)。 經由混合高斯模式將前景與背景影像分離 之後,仍然會有部分的像素點被誤判為前景,因 而產生如鹽狀般的點狀雜訊(salt noise)。此類型 的雜點可以藉由 Opening (Erosion + Dilation)與 Closing (Dilation + Erosion)過程將此雜訊除去 (Rafael, 2002)。 經由混合高斯模式處理後的黑白影像,假設 白色像素點數值為 1,黑色像素點數值為 0。則 將任意一像素點數值假設A ,其周圍像素點數0 值 由 左 上 至 右 下 假 設 為A , A , A ,1 2 3 …, A8。 則 Erosion 及 Dilation 的演算公式表示如下:表 1 採樣點經緯度表 第一採樣點 第二採樣點 第三採樣點 第四採樣點 第五採樣點 緯度 24°52'46.09" 24°52'52.07" 24°52'50.05" 24°52'52.07" 24°53'6.76" 經度 121°38'59.24" 121°38'51.68" 121°38'53.46" 121°39'50.00" 121°39'30.00" Erosion: 8 0 0 0 IF <9 0 IF =9 1 i S B S A S B ⇒ = ⎧ = ⎨ ⇒ = ⎩
∑
... (4) Dilation: 8 0 0 0 IF =0 0 IF >0 1 i S B S A S B ⇒ = ⎧ = ⎨ ⇒ = ⎩∑
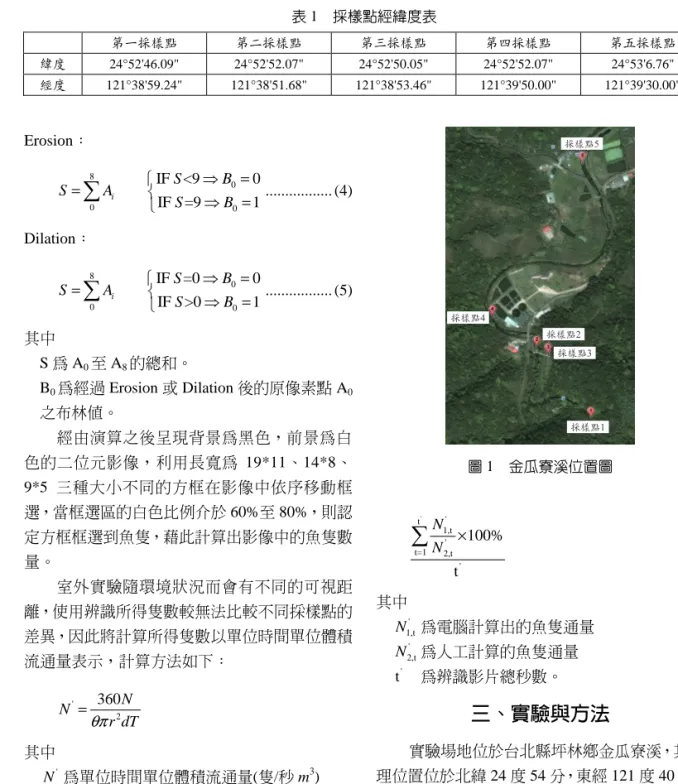
... (5) 其中 S 為 A0至 A8的總和。 B0為經過 Erosion 或 Dilation 後的原像素點 A0 之布林值。 經由演算之後呈現背景為黑色,前景為白 色的二位元影像,利用長寬為 19*11、14*8、 9*5 三種大小不同的方框在影像中依序移動框 選,當框選區的白色比例介於 60%至 80%,則認 定方框框選到魚隻,藉此計算出影像中的魚隻數 量。 室外實驗隨環境狀況而會有不同的可視距 離,使用辨識所得隻數較無法比較不同採樣點的 差異,因此將計算所得隻數以單位時間單位體積 流通量表示,計算方法如下: ' 2 360N N r dT θπ = 其中 ' N 為單位時間單位體積流通量(隻/秒 m3) N 為電腦辨識出來原始魚隻數量(隻) θ 為水下攝影機可視角,在此為 42° r 為水下攝影機可視距離(m) d 為拍攝地點溪流水深(m),T 為時間(秒)。 影像正確率的推估,利用相同影像經由人工 觀測計算每秒的魚隻數量並計算其通量後,與電 腦計算的每秒魚隻通量各別比較後取其平均,如 下公式: 4 2 5 3 1 圖 1 金瓜寮溪位置圖 ' ' t 1,t ' t=1 2,t ' 100% t N N ×∑
其中 ' 1,t N 為電腦計算出的魚隻通量 ' 2,t N 為人工計算的魚隻通量 ' t 為辨識影片總秒數。三、實驗與方法
實驗場地位於台北縣坪林鄉金瓜寮溪,其地 理位置位於北緯 24 度 54 分,東經 121 度 40 分, 為北勢溪主要支流之一。其總流域面積為 24.2 平方公里,全長為 15.2 公里,年平均流量為 1.99 立方公尺/每秒。 實驗為了瞭解自然溪流中辨識的魚隻數量 與溪流物理化學因子變化的相關性,於 2008 年 4 月 8 日上午進行一次性採樣。從上游至下游選 定五個採樣點進行影像辨識,採樣地點座標如 表 1,採樣相對位置如圖 1。影 像 的 取 得 經 由 水 下 攝 影 鏡 頭 裝 置 在 特 製 T 桿中央位置,兩邊放置 50 瓦、色溫 4700K 的鹵素補光燈並將攝影器材固定於河床底部,再 將 鏡 頭 經 由 訊 號 線 連 接 數 位 攝 影 機 SONY DCR-TRV60 進行監看與錄影。一個實驗點錄製 六分鐘影像。攝影時同時避免攝影鏡頭由水下仰 視拍攝到的水面,以減少經陽光照射產生的光影 變化造成辨識誤差的可能。 所得的原始影片經由個人電腦以 USB 線影 像擷取為 320X240,每秒 30 畫格的 AVI 影像, 影像編碼格式採用 Intel Indeo® Vedio R3.2。水 波紋、水花太過明顯或是鏡頭晃動的部份則直 接經由影像剪輯軟體剪除。最後保留每個實驗 60 秒影像片段進行電腦辨識。辨識系統採用之 軟硬體,中央處理器為 Intel Dual Core E8400, 4GB 記憶體空間,作業系統為 Windows XP with SP2,程式撰寫語言為 Visual Basic 6.0。 為了計算隨時間變化魚隻數量的改變狀況, 因此在計算每個畫格影像中的魚隻數量同時,也 紀錄魚隻座標作為比較。當下一畫格魚隻座標與 上個畫格魚隻座標小於 30 個像素點,則認定下 個畫格的魚隻座標屬於上個畫格的魚隻位移。用 此方式以辨識是否有新的魚隻游入畫面。 當魚隻游出影像邊界外,其位置座標不馬上 刪除,而保留 20 個畫格,若在 20 個畫格內魚隻 又從消失點附近游入,則依舊認定此魚隻與 20 個畫格前的魚隻相同,總數不予累計,以減低魚 隻來回游動造成系統重覆計算的可能。 每個採樣點的辨識影片另以人工觀察計算 魚隻數量、體長、魚種、以及出現時間作為背景 資訊。此外,每個採樣點同時進行水文水質資料 的背景調查,包含流速、水深、濁度等實驗檢測, 用以分析比較不同水文水質狀況下,混合高斯模 式辨識正確率的改變。
四、結果與討論
影像經由混合高斯函數,分離前景與背景影 像後,再經由 Opening 與 Closing 方式處理後的 結果,並經由人工計算之後,比較跟電腦辨識結 果的差異,在溪流的電腦辨識與人工辨識結果比 較,如下圖 2 至圖 6 所示。 由圖 2 至圖 6 可以看出,電腦辨識大多高估 實際的魚隻數量,原因在於水波紋的不規則折 射,造成水中光影不可預期的色階變化,而這樣 的色階變化對於混合高斯模式容易造成條狀雜 訊的發生,而此類雜訊無法經由 Opening 與 Closing 去除,造成系統誤判。而各段影片差異 上,第一採樣點與第五採樣點的影像,較少拍到 水面波紋反射,因此辨識出來的數據較其他三組 數據精確度高。 水中不同的流速與不同的水深可以將採樣 點性質分為急流、深流與深潭三種。其中水深小 於 30 公分、流速大於 0.3 m/s 的環境稱為急流; 水深大於 30 公分、流速大於 0.3 m/s 環境稱為深 流;水深大於 30 公分、流速小於 0.3 m/s 的環境 稱為深潭(Ian, 1993)。 因此辨識結果,與當地水文因子比較,以了 解正確率變化的原因,如表 2。 0 10 20 30 40 0 10 20 30 40 50 60 (s) ( ) 圖 2 金瓜寮溪流第一採樣點0 5 10 15 20 25 30 35 40 0 10 20 30 40 50 60 (s) ( ) 圖 3 金瓜寮溪流第二採樣點 0 10 20 30 40 0 10 20 30 40 50 60 ( ) (s) 圖 4 金瓜寮溪流第三採樣點 0 5 10 15 20 25 30 35 40 0 10 20 30 40 50 60 (s) ( ) 圖 5 金瓜寮溪流第四採樣點 0 5 10 15 20 25 30 35 40 0 10 20 30 40 50 60 (s) ( ) 圖 6 金瓜寮溪流第五採樣點
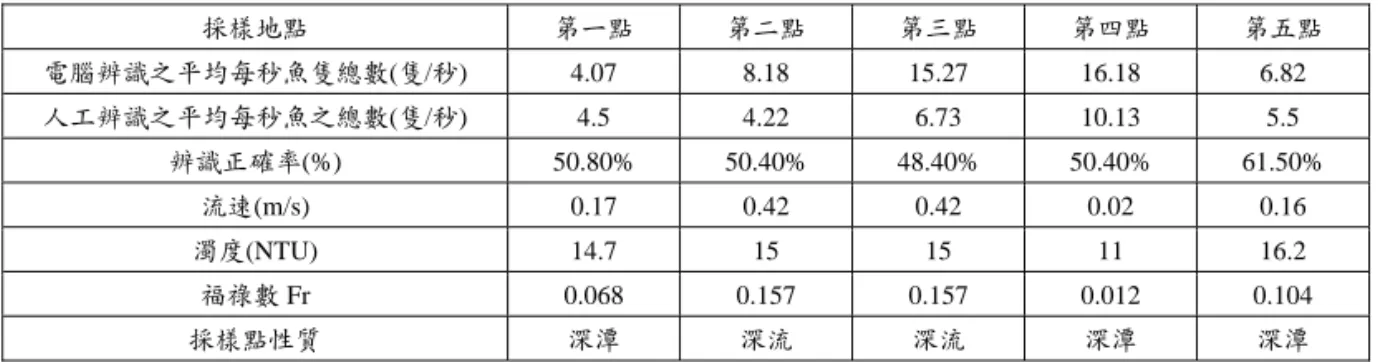
表 2 採樣點辨識正確率與環境因子比較表 採樣地點 第一點 第二點 第三點 第四點 第五點 電腦辨識之平均每秒魚隻總數(隻/秒) 4.07 8.18 15.27 16.18 6.82 人工辨識之平均每秒魚之總數(隻/秒) 4.5 4.22 6.73 10.13 5.5 辨識正確率(%) 50.80% 50.40% 48.40% 50.40% 61.50% 流速(m/s) 0.17 0.42 0.42 0.02 0.16 濁度(NTU) 14.7 15 15 11 16.2 福祿數 Fr 0.068 0.157 0.157 0.012 0.104 採樣點性質 深潭 深流 深流 深潭 深潭 表 3 不同前人研究與混合高斯模式特性比較表 作 者 蕭友晉 張文亮 林享曇、張嘉孟 方煒、朱元南 林宜弘 Paul, Philip and Derek Chatain, Debas and Bourdillon Strachan and Nesvadba Zion, Shklyar and Karplus 辨 識 方 法 混合高斯模式 畫格相減法 畫格相減法 Artificial Neural Network Photographic Method Weighing Method Invariant moments, Optimization of the mismatch, Shape descriptors. Moment- Invariants 影 像 來 源 影片 影片 影片 照片 照片 (人工計算) 照片 影片 實 驗 場 地 室內室外皆可 場 地 不 限 ( 溪 流 、 池 塘 、 溼 地、水槽…) 室內 循環水道式 養殖池 室內 白色淺盤 室內 白色塑膠淺盤 室內 矩形水池 室內 魚隻撈出來 拍攝 室內 矩形水池 背 景 限 制 固定不動的 背景 白色背景 白色背景 白色背景 白色背景 白色背景 --- 魚 隻 限 制 不限 體長由 5~30 cm 大小不等 淺盤內魚隻 70 隻以下 魚隻大小介於 45-90 mm 大小顏色 需類似 --- --- 水 體 限 制 濁度低於 15NTU 清澈水 清澈水 清澈水 清澈水 X (撈出來拍) 清澈水 光 源 限 制 混 合 高 斯 模 式 有 機 器 自 我 學 習能力,可適應 光 源 改 變 自 行 校正 固定打光 固定打光 固定打光 固定打光 固定光源 固定光源 正 確 率 15NTU 的環境 中 辨 識 準 確 率 可以大於 50% 濁 度 越 低 正 確 率越高。 在計數方面可達 到 95.7%的準確 率 碗盤內於苗 在 70 之內計 數準確率達 99%。 碗盤內 100 隻 魚可達 94%準 確率 正確率 79%-92% 63%-90% 91%-100% ---:表示文獻中沒有說明。
影像辨識在五個採樣點中大致上都有超過 50%的正確率,其中正確率因流速的增加而略為 下降,然而五個採樣點福祿數(Froude number)皆 小於 1,為亞臨界流(Sub-critical Flow),因此其 影響程度不至明顯。 金瓜寮溪所屬的南勢溪主要為供應大台北 地區飲用水的溪流,水質較為良好,因此五個採 樣點的濁度對於正確率的影響程度在此野外實 驗中並不明顯,水中濁度與正確率只有些微的反 比關係。 混合高斯模式演算的方式會將每個所辨識 完的畫格依照學習速率α 的權重比,加入母體的 高斯函數中,並且藉由這樣的方式排除太陽的光 照位置以及環境色溫改變所造成的背景差異,因 此理論上模式在訓練完成開始實際辨識之後,會 隨著辨識的時間越長,藉由系統的自我學習而使 精確率越來越高。 與 多 位 前 人 研 究 進 行 比 較 , 其 比 較 表 如 表 3。由比較表可以看出,本研究是唯一可以適 用野外自然光源變化下的辨識方法,不受限光源 改變、不受限複雜背景、不受限魚隻體長、可以 抵抗部份濁度之水域、具有機器學習(Machine Learning)自動校正誤差的功能。
五、結論與建議
1. 影像辨識因影像的清晰度與否而使正確率改 變,因此低濁度的上游河川較適合此種非破壞 性監測的實際應用。 2. 實驗驗證的結果於溪流等流動水體,經由攝影 技巧輔助的狀況下,辨識正確率接近 60%。 3. 在影像辨識的正確率關鍵上,受限於影像的取 得的清晰度,以及背景受到干擾的程度最為關 鍵。其取得要避免攝影機由水底拍攝到水面, 以免不規則的水波紋造成背景影像的高斯分 佈不穩定;此外需避免在陰影短時間劇烈變化 的地方拍攝,因為背景的光線不穩定嚴重影響 混合高斯的背景模型建立。 4. 影像辨識方法尚無法在野外辨識魚隻種類,原 因在於魚種外型資料庫數據不足,未來可藉由 更多影像資料建立對應模式以及加入機器自 我學習機制達到魚種辨識的目標。六、致 謝
本研究感謝行政院國家科學委員會「影像辨 認計數魚類族群豐富度於人工濕地之研究計畫」 之經費支持。七、參考文獻
1. 邵廣昭、何林泰、林介屏,1993。魚類群聚 生態調查監測與分析方法。生物科學,第三 十六卷、第 2 期,41-56 頁。 2. 林宜弘,1995。機器視覺應用在魚苗計數之 可行性研究。農業機械學刊,第四卷、第 2 期,37-45 頁。 3. 林享曇、張嘉孟、方煒、朱元南,2006。應 用機器視覺的養殖池魚類自動計量分析系 統。農業機械學刊,第 15 卷、第 1 期,25-36 頁。 4. 郭世榮,1996。清水溪流域魚類族群結構與 環境因子關係之研究。生物科學,第三十九 卷、第 1 期,28-40 頁。 5. 葉素惠,1997。清流復活事業都市河 川生物生息環境回復。東京農工大學, 碩士論文。 6. 蕭友晉、張文亮,2006。以影像辨識技術計 算生物數量以作水域工程生態效益評估。生 態工程研討會,473-478 頁。7. Baker, C. S., J. M. Straley and A. Perry, 1992. Population characteristics of individually identified humpback whales in southeastern Alaska: Summer and fall 1986. Fishery Bulletin. Vol. 90, pp. 429-437.
8. Chang, M. H., Y. S. Lin and L. C. Chaung, 1999. Effect of Dams on Fish Assemblages of the Tachia River, Taiwan. Acta Zoologica Taiwanica. Vol. 10, No. 2, pp. 77-90.
9. Chatain, B., L. Debas and A. Bourdillon, 1996. A photographic larval fish counting technique: comparision with other methods, statistical appraisal of the procedure and practical use.
Aquaculture. Vol. 141, pp. 83-96.
10. Chuang, L. C., Y. S. Lin and S. H. Liang, 2006. Ecomorphological Comparison and Habitat Preference of 2 Cyprinid Fishes, Varicorhinus
barbatulus and Candidia barbatus, in Happen
Creek of Northern Taiwan. Zoological Studies. Vol. 45, No. 1, pp. 114-123.
11. Duda, R. O., P. E. Hart and D. G. Stork, 2001. Pattern Classification, Second Edition. John Wiley and Sons, Inc. New York, USA.
12. Hunke, M. and A. Waibel, 1994. Face locating and tracking for human-computer interaction. Signals, Systems and Computers. Vol. 2, No. 31, pp. 1277-1281.
13. Ian G. Jowett, 1993. A method for objectively identifying pool, run, and riffle habitats from physical measurements, New Zealand Journal of Marine and Freshwater Research. Vol. 27, pp. 241-248.
14. Kato S., K. Tamada and Y. Chujo, 1996. A quantification of goldfish behavior by an image processing system. Behavioral Brain Research. Vol. 80, pp. 51-55
15. Kato S., T. Nakagawa and M. Ohkawa, 2004. A computer image processing system for quan-tification of zebrafish behavior. J. Neuroscience Methods, Vol. 134, pp. 1-7.
16. Katona, S. K., B. Baxter, O. Brazier, S. Kraus, J. Perkins and H. Whitehead, 1979. Identification of humpback whales by fluke photographs. Behavior of Marine Animals. Vol. 3, pp. 33-44. Plenum Press, New York, USA.
17. Katona, S., 1989. Getting to know you: New way of looking at marine mammals. Oceanus. Vol. 32, pp. 37-44.
18. Newbury, p. F., P. F. Culverhouse and D. A. Pilgrim, 1995. Automatic fish population counting
by artificial neural network. Aquaculture. Vol. 133, pp. 45-55.
19. Paul F. Newbury, Philip F. Culverhouse and Derek A. Pilgrim, 1995. Automatic fish population counting by artificial neural network. Aquaculture. Vol. 133, pp. 45-55.
20. Rafael, C. G. and E. W. Richard, 2002. Digital Image Processing, Second Edition. Prentice-Hall, Inc. New Jersey, USA.
21. Stauffer, C. and W. E. L. Grimson, 1999. Adaptive background mixture models for real-time tracking. IEEE Conference on Computer Vision and Pattern Recognition. pp. 246-252.
22. Stauffer, C. and W. E. L. Grimson, August 2000. Learning patterns of activity using real-time tracking. IEEE Transactions on Pattern Analysis and Machine Intelligence. Vol. 22, No. 8, pp. 747-757.
23. Sternberg, S. R., 1986. Grayscale morphology. Computer Vision, Graphics Image Process. Vol. 35, pp. 333-355.
24. Strachan n. j. c. and p. Nesvadba, 1990. Fish Species Recognition by Shape Analysis of Image. Pattern Recognition, Vol. 23, No. 5, pp. 539-544. 25. Yang, C. H., 1997. The effect of the water
temperature on Taiwan landlocked salmon (Oncorhynchus masou formosanus) in Chichiawan Stream basin. Master’s thesis, National Tsing Hua University, Hsinchu, Taiwan.
26. Zion B., A. Shklyar and I. Karplus, 2000. In-vivo fish sorting by computer vision. Aquacultural Engi-neering. Vol. 22, pp. 165-179.
收稿日期:民國 98 年 4 月 9 日 修正日期:民國 98 年 9 月 8 日 接受日期:民國 98 年 9 月 15 日