國 立 交 通 大 學
應 用 數 學 研 究 所
博 士 論 文
Vogan 圖之等價分類
Equivalence Classes of Vogan Diagrams
研究生: 胡舉卿
指導教授: 蔡孟傑教授
Vogan 圖之等價分類
Equivalence Classes of Vogan Diagrams
學 生:胡舉卿 Student: Chu-Chin Hu
指導教授:蔡孟傑教授 Adviser: Pro. Meng-Kiat Chuah
國 立 交 通 大 學
應 用 數 學 研 究 所
博 士 論 文
A Thesis
Submitted to Department of Applied Mathematics
College of Science National Chiao Tung University
in Partial Fulfillment of Requirements
for the Degree of
in
Applied Mathematics
June 2006
Hsinchu, Taiwan, Republic of China.
Vogan 圖之等價分類
研究生: 胡舉卿
指導教授: 蔡孟傑教授
國 立 交 通 大 學
應 用 數 學 研 究 所 博 士 班
摘 要
在 Dynkin 圖上給定一個 involution, 並在該 involution 的固定點
上塗上黑或白色即為 Vogan 圖。一個 Vogan 圖則表示一個實數的簡單
李代數。若兩個 Vogan 圖所表示的李代數互相等價,我們稱這兩個圖
亦等價,而這篇論文將等價的 Vogan 圖作分類。在研究分類的方法
時,我們發現了等價的 Vogan 圖所對應的 Dynkin 圖在圖的塗色中有
特別的性質。這些組合學的性質簡化了大部分等價分類的證明。
本篇論文分為三個部分;在第一部份(第 1-6 節)簡單的介紹一些
李代數的基本概念及相關理論的概述。第二部分(第 7-10 節)為這篇
論文的主要研究結果。在第三部份(第 11 節)我們利用圖的塗色驗證
大部分Dynkin圖的可能性,但無法排除“E
"。
Equivalence Classes of Vogan Diagrams
Student : Chu-Chin Hu
Advisor : Pro. Meng-Kiat Chuah
Department of Applied Mathematics,
National Chiao Tung University
Abstract
A Vogan diagram is a Dynkin diagram with an involution, and the
vertices fixed by the involution may be painted. They represent real simple
Lie algebras, and two diagrams are said to be equivalent if they represent
the same Lie algebra. Our purpose is to classify the equivalence classes of
all Vogan diagrams. In doing so, we find that the underlying Dynkin
diagrams have certain properties in graph painting. We show that this
combinatorial property provides an easy classification for most of the
simply-laced Dynkin diagrams.
This thesis is divided into three parts. In the first part, consisting of
Sections 1-6, we give a brief introduction of some fundamental concepts in
Lie algebra and a survey of various results without proof. The second part,
consisting of Sections 7-10, is the main results of this thesis. In the last part
(Section 11), we use the method of graph painting to verify almost all
simply-laced Dynkin diagrams except the "fake E_9".
誌 謝
在交大應用數學系待了六年的時間了,終於要畢業,心裡又是高興又
不捨。能順利畢業總是件開心的事,但要離開交大的點點滴滴,心中百感
交集。
能夠順利完成這篇論文,我最要感謝的是蔡孟傑老師對我的栽培及指
導。除了在學術方面的教導之外;更感謝蔡老師在生活上的關心及幫忙。
從老師身上我不僅學到做研究的態度更學到許多生活上寶貴的經驗。謝謝
老師一路來的栽培及支持。另外,感謝許義容、張麗萍老師在學業上的指
導;感謝于靖老師、潘樹衍老師以及莊重老師給我的指教及幫忙。
排球隊是我在交大的生活的另一個重心。打排球是我的興趣,也因
此結交了不少可貴的好友。感謝我的隊友兼死黨:珮蓉、怡純、彥妤及雅
欣,一起並肩作戰南征北討;在我心情不好時陪我徹夜聊天談心,謝謝妳
們的關心及付出。感謝雅文、乃心以及月偉在生活上給我的關懷及幫忙,
你們真的是很貼心的學妹!還有系排的學妹們除了忍受我在場上的咆哮
外,還得在打球之餘供我使喚,謝謝妳們囉!我常常覺得球場是人生的縮
影,在排球場上的練習,與隊友的合作,和他人相處,以及臨場的發揮…
種種的經驗讓我收穫不少。感謝鄉親張景榮給我的經驗分享,相互鼓勵。
我很慶幸能有你們這群好友,豐富並溫暖了我的生活。
最後,我要感謝我的家人:哥哥舉軍,妹妹舉芬及弟弟舉鳶相互的支
持及關懷,為家裡付出分憂解勞,讓我可以無後顧之憂的完成學業。能夠
有今天的成就,我更要感謝我的父親胡振光上校辛苦的養育及栽培,他不
求回報的付出造就了今天的我。在此將我的成就與榮耀與你們一起分享!
Contents
1 Introduction ...……… 1
2 Killing Form ……….. 3
3 Root Space Decomposition ………... 5
4 Cartan Involution and Cartan Subalgebra ………. 7
5 Dynkin Diagram ……… 9
6 Vogan Diagram ……… 11
7 Classifications of Vogan Diagrams ………. 12
8 Classical Diagrams ……….. 16
9 Exceptional Diagrams ……….…… 20
10 Nontrivial Involutions ……….…… 29
11 Graph Paintings ………..……. 30
References ……….. 33
iv1
Introduction
An Lie algebra is a vector space g with an anti-symmetric bilinear map [ , ] : g × g −→ g
which satisfies the Jacobi identity
[[X, Y ], Z] + [[Y, Z], X] + [[Z, X], Y ] = 0. Let F be R or C. Then
sl(n, F ) = {A ∈ Mn(F ); trace(A) = 0} ;
u(n) = {A ∈ Mn(C); A + A∗ = 0} (skew-Hermitian);
o(n) = u(n) ∩ Mn(R) (skew-symmetric);
su(n) = u(n) ∩ sl(n, C); so(n) = o(n) ∩ sl(n, R);
are all simple Lie algebras with [A, B] = AB − BA for all A, B ∈ g. If a, b are subsets of g, we write
[a, b] = span{[X, Y ]; X ∈ a, Y ∈ b}.
A Lie subalgebra h of g is a subspaces satisfying [h, h] ⊂ h; then h itself is a Lie algebra. An ideal h in g is a subspaces satisfying [h, g] ⊂ g; an ideal is automatically a subalgebra. A Lie algebra g is called abelian if [g, g] = 0. A finite-dimensional Lei algebra is simple if it is nonabelian and has no nonzero proper ideas.
For any algebra g we get a linear map (adjoint map) ad : g −→ End(g) given by (adX)Y = adXY = [X, Y ].
By the Jacobi identity, we see that for all X ∈ g, adX is a derivation.
Let g1, g2 be two Lie algebras. A Lei algebra homomorphism is linear map φ :
g1 −→ g2 such that
Throughout this thesis, we assume all vector spaces to be finite dimensional, over R or C.
2
Killing Form
The Killing form of a Lie algebra g is the symmetric bilinear form B : g × g −→ F defined by
B(X, Y ) = trace(adX · adY).
The Killing form is invariant, in the sense that
B(adXY, Z) = −B(Y, adXZ).
Equivalently, B([X, Y ], Z) = −B(Y, [X, Z]).
The Killing form can often be hard to compute, because it involves a careful choice of basis to avoid messy computation. If g is a subalgebra of Mn(F ), it is often
convenient to use the trace form
(A, B) = trace(AB), for all A, B ∈ g
to substitute for the Killing form. If g is simple, then the Killing form and the trace form differs by a nonzero scalar.
Let g0 be a real Lie algebra. Define g = g0⊗ C = g0+ ig0. In this case we say that
g is the complexification of g0, and that g0 is a real form of g. The complex linear
extension of [ , ] in g0 is a natural complex Lie algebra structure on g. Notice that
non-isomorphic real Lie algebras may have the same complexification. For example, sl(n, R) and su(n) are both real forms of sl(n, C).
A Lie algebra is called semisimple if its Killing form is non-degenerate, e.g. sl(n, F ), su(n), so(n) are all semisimple Lie algebras. Since the complex linear ex-tension preserves trace, we conclude that g0 is semisimple if and only if g0 ⊗ C is
semisimple.
We say a Lie algebra g is compact if its Killing form is negative definite. The following are some examples of complex Lie algebras and their compact real forms:
Complex Lie algebra: Mn(C) so(n, C) sl(n, C) sp(n, C)
Compact real form: u(n) so(n) su(n) sp(n)
3
Root System and Root Space Decomposition
Let (V, < , >) be an inner product space, and ∆ ⊂ V a finite set which spans V . Each nonzero α ∈ V defines a reflection rα by α 7→ −α and fixing the hyperplane
orthogonal to α. We say that ∆ is a root system if it satisfies the following: (1) If α ∈ ∆, the only multiples of α in ∆ are ±α.
(2) If α ∈ ∆, the reflection rα leaves ∆ invariant.
(3) If α, β ∈ ∆, then 2<α,β><α,α> ∈ Z.
If ∆i ⊂ Ei are root systems for i = 1, 2, then ∆1× ∆2 ⊂ E1× E2 is also a root
system. A root system is called reducible if it is a non-trivial product of two root systems. Otherwise, it is called irreducible. A Lie algebra is simple if and only if its root system is irreducible.
Let g be a complex semisimple Lie algebra. We say a subalgebra h ⊂ g is a Cartan subalgebra if
(1) h is maximal abelian, and
(2) adh is simultaneously diagonalizable. Namely, adX : g −→ g is diagonalizable
for all X ∈ h.
For example, h = {diagonal matrices} is a Cartan subalgebra of g = sl(n, C). From the Cartan subalgebra h of g, we can write
g = h + X
α∈∆
gα,
where 0 6 ∈∆ ⊂ h∗ is a finite set and
gα = {Y ∈ g; adXY = α(X)Y, for all X ∈ h.}.
(3.1)
Consider V = h∗, with inner product coming from the dual of the Killing form, then
∆ form a root system and (3.1) is called the root space decomposition of g. Elements in ∆ are called roots and gα is called a root space.
Proposition 3.1 If α, β ∈ ∆ and α + β ∈ ∆, then [gα, gβ] = gα+β.
Given a root system ∆ ⊂ h∗, we can choose a subset Π ⊂ ∆, called simple system,
such that
(1) Π is s basis for h∗, and
(2) Every root is either a nonnegative linear combination of Π (positive root) or a nonpositive linear combination of Π (negative root).
Use the notation ∆± for the positive and negative roots, so that Π ⊂ ∆+ ⊂ ∆
and ∆ = ∆+∪ ∆−.
4
Cartan Involution and Cartan Subalgebra
Let g be a semisimple Lie algebra with the Killing form B. The sum g = k + p is called a Cartan decomposition if it satisfies the following two conditions:
(1) [k, k] ⊂ k , [k, p] ⊂ p and [p, p] ⊂ k. (Hence k is a subalgebra of g.)
(2) The Killing form B of g is negative definite on k and positive definite on p. A Cartan involution on g is a Lie algebra homomorphism θ : g −→ g with θ2 = 1
such that −B(·, θ·) is an inner product on g.
Let V+, V− ⊂ g denote the +1 and -1 eigenspaces of θ respectively, then g =
V++ V− is a Cartan decomposition of g. Conversely, given a Cartan decomposition
g = k + p then we obtain a Cartan involution θ : g −→ g by θ(X) = X, if X ∈ k; −X, if X ∈ p.
Namely, there is a one-to-one correspondence between Cartan involutions and Cartan decompositions of g.
Example: For g = sl(n, C), then θ(A) = −A∗ defines a Cartan involution with
the +1 eigenspace k = su(n) and the −1 eigenspace p = isu(n).
Let g be a real semisimple Lie algebra. We say that h ⊂ g is a Cartan subalgebra if h ⊗ C is a Cartan subalgebra of g ⊗ C. The Cartan subalgebra is called θ-stable if θ(h) = h. In this case
h = (h ∩ k) + (h ∩ p).
Write t = h ∩ k and a = h ∩ p, so that h = t + a. We call t and a the compact and noncompact parts of h. Various Cartan subalgebras t + a ⊂ g may have different dimensions for t and a. But distinct Cartan subalgebras have the same dimension dim t + dim a. It is called the rank of g. It is a fact that we can always find a θ-stable maximally compact Cartan subalgebra of g.
For example, in g = sl(2, R), we can take the diagonal matrices or so(2) as the Cartan subalgebra. In the first case dim t = 0 and dim a = 1; and in the second case dim t = 1 and dim a = 0.
A Cartan subalgebra is called maximally compact if the dimension of t is as large as possible. It is called compact if h = t. For example so(2) is a compact Cartan subalgebra of sl(2, R). For sl(3, R), which has rank 2, a maximally compact Cartan subalgebra is not compact because dim t = dim a = 1.
5
Dynkin Diagram
Given a semisimple Lie algebra g with a Cartan subalgebra h and a choice of root system ∆ ⊂ h∗. We shall draw a graph D = D(g) or D = D(∆) to represent g or
root system ∆. It is called the Dynkin diagram.
Pick a choice of simple system Π ⊂ ∆. The vertices of D are the elements of Π. Let αi, αj ∈ Π. Write
aij =
2 < αj, αi >
< αi, αi >
,
here < , > comes from the Killing form. The matrix A = (aij) is called the Cartan
matrix.
The vertices of αi and αj in D are joint by aijaji edges. Note in particular that
there is no edge joining them if and only if the roots are orthogonal. So the semisimple Lie algebra is simple if and only if its Dynkin diagram is connected. It suffices to study the connected Dynkin diagrams. As a fact, the quantity aijaji is 0,1,2 or 3.
Suppose that the roots are not orthogonal, so that aijaji is 1, 2, 3. In the case that it
is 2 or 3, draw an arrow pointing from the long root to the short root. The resulting diagram is the Dynkin diagram.
Notice that the Dynkin diagram D is independent of the choice of h or ∆. So g determines D. Conversely, non-isomorphic algebras have distinct diagrams. So g1 ∼= g2 if and only if D(g1) ∼= D(g2).
The classification of complex simple Lie algebras is done by E. Cartan in the end of the 19th century. They are gathered into 7 classes, denoted by A, B, C, D, E, F, G. Using the subscript to denote the dimension of h (or the number of vertices in the Dynkin diagram), they are An, Bn, Cn, Dn, E6, E7, E8, F4, G2. The classes A, B, C, D
have infinite number of members, and are called the classical algebras. The classes E, F, G have finite number of members, and are called the exceptional algebras. Their Dynkin diagrams are given by:
An e . . . e Bn e . . . ei e Cn e . . . eh e Dn e . . . e% %% e e ee e E6 e e e e e e E7 e e e e e e e E8 e e e e e e e e F4 e ei e e G2 ei e 10
6
Vogan Diagram
We shall try to draw a picture to represent a real simple g. Since g ⊗ C is complex simple, let D = D(g ⊗ C) denote its Dynkin diagram. The idea is to add extra information to D to reveal the real form g. The resulting picture, namely D with extra information, is called a Vogan diagram of g.
Start with a Cartan involution θ on g, and a θ-stable maximally compact Cartan subalgebra h = t + a in g. Let ∆ be a root system. A root α ∈ ∆ is said to be a real root or an imaginary root depends on α(h) ⊂ R or α(h) ⊂ iR. So α is imaginary if and only if it annihilates a. We say that α is a complex root if it is neither real nor imaginary. Since h is the maximally compact Cartan of g, there is no real root, that is α(t) 6= 0.
Extend θ to be complex linear on g ⊗ C. We can let θ act on the roots such that θ(g ⊗ C)α = (g ⊗ C)θα. Then θα = α if and only if α is imaginary. We can further
choose the simple system Π so that θ(Π) = Π. This leads to an automorphism θ on the Dynkin diagram D = D(g ⊗ C). So the imaginary simple roots are the vertices of D which are fixed by θ. The complex simple roots are the vertices on D which are not fixed by θ; they form 2-element orbits.
Let α be an imaginary simple root. Define the 2-dimensional space gα = g ∩ ((g ⊗
C)α+ (g ⊗ C)−α). Since θ fixes α, it follows that θ(gα) = gα. So θ is 1 or −1 on gα.
Equivalently, gα ⊂ k or gα ⊂ p. We say that α is compact or noncompact accordingly.
So there are three types of simple roots: complex, imaginary compact, imaginary noncompact. Depending on whether the imaginary root is compact or noncompact, we color the vertex in D as white or black. The complex roots have no color.
A Vogan diagram is a Dynkin diagram with an involution θ, such that the vertices fixed by θ are either white or black. We have used a real simple Lie algebra to construct a Vogan diagram. Conversely, every Vogan diagram represents a real simple Lie algebra.
7
Classifications of Vogan Diagrams
Each Vogan diagram corresponds to a real simple Lie algebra. Two diagrams are said to be equivalent if they represent the same Lie algebra. We are interested in equivalence classes of the Vogan diagrams. In this respect we can ignore once and for all the diagrams with no painted vertex, as they represent Lie algebras without noncompact imaginary root and so cannot be equivalent to any diagram with painted vertices. Then the Borel-de Siebenthal theorem [3] says that every Vogan diagram is equivalent to one with a single painted vertex. However, it does not give the explicit equivalence. We shall develop algorithms which convert a diagram to an equivalent one with fewer painted vertices. As a result, not only we have reproved the Borel-de Siebenthal theorem, we give the equivalence classes explicitly. We shall label the vertices of the underlying Dynkin diagram with 1, ..., n. Then the Vogan diagram with vertices i1, ..., ik painted, where i1 < ... < ik, is denoted by (i1, ..., ik). For diagrams
with θ = 1, the equivalence classes are listed in the following table.
Dynkin Diagram Single Painted Vertex Equivalent Diagrams
Anb 1 . . . b n (N ), 1 ≤ N ≤ n+1 2 (i1, . . . , ik), Pk p=1(−1) k−pi p= N, n + 1 − N. Bnb 1 . . . b n-1i b n (N ), 1 ≤ N ≤ n (i1, . . . , ik), Pk p=1(−1) k−pi p= N . (n) (i1, . . . , ik, n) Cnb 1 . . . b n-1h b n (N ), 1 ≤ N ≤ n 2 (i1, . . . , ik), ik≤ n − 1 , Pk p=1(−1)k−pip= N, n − N. (i1, . . . , ik), ik≤ n − 2 , Pk p=1(−1)k−pip= N, n − N. Dn b 1 . . . b n-2 % % b e eb n-1 n (N ), 1 ≤ N ≤ n 2 (i 1, . . . , ik, n − 1, n), Pk p=1(−1) k−pi p= N − 1, n − N − 1. (n) (n − 1), (i1, . . . , ik, n − 1), (i1, . . . , ik, n). Table 1
(continue next page)
Dynkin Diagram Single Painted Vertex Equivalent Diagrams (1), (5), (2, 4), (1, 3, 4), (1, ∗), (2, ∗), (4, ∗), (5, ∗), (3, 5, ∗) (1) (i1, ..., ik, j1, ..., jl, s) l 6= 1 , J = 2 − I and I + s is odd , 4 − I and I + s is even , 1 − I. E6 b 1 b 2 b 3 b 4 b 5 b ∗ (i1, ..., ik, j1, s), J = ( 4 + I and I + s is odd , 1 + I. (2), (3), (4), (3, 5), (3, ∗), (2, 4, ∗), (1, 3, 4, ∗) (∗) (i1, ..., ik, j1, ..., jl, s) l 6= 1 , J = 2 − I and I + s is even , 4 − I and I + s is odd , 3 − I. (i1, ..., ik, j1, s), j1= ( 4 + I and I + s is even , 3 + I. (2), (3), (5), (3, 5), (3, 4, 6), (3, 4, 5, 6), (4, ∗), (6, ∗), (2, 4, ∗), (1, 3, 4, ∗) (1) (i1, ..., ik, j1, ..., jl, s) l 6= 1 , J = ( 1 − I, 3 − I and I + s is odd , 2 − I, 4 − I and I + s is even . (i1, ..., ik, j1, s), j1= ( 1 + I, 2 + I, 3 + I, 5 + I and I + s is even , 4 + I and I + s is odd . (2, 4), (1, 3, 4), (1, ∗), (2, ∗), (5, ∗), (3, 5, ∗), (3, 4, 6, ∗), (3, 4, 5, 6, ∗) E7 b 1 b 2 b 3 b 4 b b 6 5 b ∗ (6) (i1, ..., ik, j1, ..., jl, s) l 6= 1 , J = ( 1 − I and I + s is even , 2 − I and I + s is odd . (i1, ..., ik, j1, s), j1= 1 + I, 2 + I, 5 + I and I + s is odd. (4), (3, ∗) (∗) (i1, ..., ik, j1, ..., jl, s) l 6= 1 , J = ( 3 − I and I + s is even , 4 − I and I + s is odd . (i1, ..., ik, j1, s), j1= ( 3 + I and I + s is odd , 4 + I and I + s is even . (2), (3), (6), (1, ∗), (2, ∗), (5, ∗), (6, ∗) (7) (i1, ..., ik, j1, ..., jl, s) l 6= 1 , J = 1 − I, 5 − I and I + s is even , 3 − I and I + s is odd , 2 − I, 6 − I. E8 b 1 b 2 b 3 b 4 b b 6 5 b ∗ b 7 (i1, ..., ik, j1, s), j1= 1 + I, 5 + I and I + s is odd , 3 + I and I + s is even , 2 + I, 6 + I. (1), (4), (5), (3, ∗), (4, ∗), (7, ∗) (∗) (i1, ..., ik, j1, ..., jl, s) l 6= 1 , J = 1 − I, 5 − I and I + s is odd , 3 − I and I + s is even , 4 − I. (i1, ..., ik, j1, s), j1= 1 + I, 5 + I and I + s is even , 3 + I and I + s is odd , 4 + I. (1) (i1, . . . , ik), {i1, . . . , ik} ∩ {1, 2} 6= ∅ F b bi b b
The left column labels the vertices with 1, 2, 3, ... and so on. The middle column lists the diagrams with single painted vertex, for example (2) corresponds to the diagram with vertex 2 painted. The right column provides all the Vogan diagrams in their equivalence classes. For example if we consider (1, 3, 4) in A5, then the formula
i3 − i2 + i1 = 4 − 3 + 1 = 2 says that it is equivalent to the diagram with vertex 2
painted.
It turns out that Enare the most complicated ones. The following methods explain
how to use Table 1 for Vogan diagrams of En:
(1) Diagrams in the following special cases:
(2, 4), (1, 3, 4), (3, 5), (2, 4, ∗), (1, 3, 4, ∗), (3, 5, ∗),
(3, 4, 6), (3, 4, 5, 6), (3, 4, 6, ∗), (3, 4, 5, 6, ∗) in E6 and E7. (7.1)
Obviously we disregard the second row of (7.1) in E6 because there is no vertex
6. Their equivalence classes can be found directly in Table 1. (2) Diagrams not in (7.1):
Write it in the form
(i1, ..., ik, j1, ..., jl, s),
(7.2)
where 1 ≤ i1 < ... < ik ≤ 3 < j1 < ... < jl ≤ n − 1, and s is either ∗ or empty
depending on whether ∗ is painted or not. In this case, let I =Pk
p=1(−1)k−pip, (I = 0 if no i appears)
J =Pl
p=1(−1)l−pjp. (J = 0 if no j appears)
(7.3)
Set l = 0 if no j appears. In computing the sign of I +s, we make the convention that s = ∗ is odd and s = ∅ is even. Then find the equivalence class in Table 1. Note that method (2) cannot be used against the diagrams in (7.1), because that would lead to the wrong equivalence classes. The significance of (7.1) will be explained in Proposition 9.2 later.
For example, consider (1, 2, 3, 5, ∗) in E7, which is not in (7.1). We see that l = 1,
I = i3− i2+ i1 = 3 − 2 + 1 = 2, and J = j1 = 5 = 3 + I.
Here s = ∗, and so I + s = 2 + ∗ is odd. By Table 1, (1, 2, 3, 5, ∗) ∼ (∗) in E7.
We shall prove Table 1, for the classical diagrams in §2, and the exceptional diagrams in §3. We shall only prove the equivalence of each grouping in Table 1. We need not prove inequivalence of different groupings, since this is done in [4]. For instance [4, p.355] says that in A4, (1) is su(1, 4), and (2) is su(2, 3), so (1) and (2)
are not equivalent.
Next we consider the Vogan diagrams with nontrivial involutions θ. Here θ imposes a symmetry requirement on the underlying Dynkin diagrams, and the only vertices fixed by θ may be painted. Therefore such Vogan diagrams are limited. They are listed in the following table, together with their equivalence classes, where “↔” indicates the two-element-orbits of θ. Once again we ignore the ones without painted vertex, which are obviously not equivalent to any other diagram.
Dynkin Diagram Single Painted Vertex Equivalent Diagrams
An n odd b n + 1 2 %% b eebl . . . b . . . lb n 1 (n+1 2 ) Dn b 1 . . . b n-2 % % b eebl n-1 n (N ), N ≤ n−1 2 (i1, ..., ik), ik≤ n − 2, Pk p=1(−1)k−pip= N, n − N − 1. E6 b b ∗ 3 2 4 % % b eebl b b l 5 1 (∗) (3), (3, ∗) Table 2
We shall prove Table 2 in §4. Tables 1 and 2 confirm the Borel-de Siebenthal theorem. Their proofs use some algorithms F [i] (see (8.1) below) which reduce the number of painted vertices to one. In §5, we show that these algorithms lead to a necessary condition for a graph to be Dynkin (Corollary 1). We shall see that this necessary condition is almost sufficient, thereby providing a very easy classification for almost all simply-laced Dynkin diagrams.
8
Classical Diagrams
In this section we consider Vogan diagrams of types A, B, C, D in Table 1, with θ = 1. We label their vertices with 1, ...., n as in Table 1. A Vogan diagram with painted vertices i1, ..., ik, where 1 ≤ i1 < ... < ik ≤ n, is denoted by (i1, ..., ik). Suppose that
i ∈ {i1, ..., ik}, so that i is a painted vertex. We introduce an operation F [i] on the
Vogan diagram as follows. Let F [i] act on the root system by reflection corresponding to the noncompact simple root i. As a result, it leads an equivalent Vogan diagram. The effect of F [i] on the Vogan diagram is as follows (developed in [1], see also [2, p.89]): F [i] :
• The colors of i and all vertices not adjacent to i remain unchanged.
• If j is joined to i by a double edge and j is long, the color of j remains unchanged.
• Apart from the above exceptions, reverse the colors of all vertices adjacent to i.
(8.1)
For instance, if we apply F [4] to (1, 3, 4, 7), then we reverse the colors of 3, 5 and get (1, 4, 5, 7). Thus (1, 3, 4, 7) is equivalent to (1, 4, 5, 7).
Using the operation F [i], the next lemma shows that a pair of painted vertices can be shifted leftward or rightward.
Lemma 8.1 Let i1 < ... < ik.
(a) (i1, ..., ik) ∼ (i1, ..., ir−1, ir− c, ir+1− c, ir+2, ..., ik) whenever ir−1 < ir− c.
(b) (i1, ..., ik) ∼ (i1, ..., ir−1, ir+ c, ir+1+ c, ir+2, ..., ik) whenever ir+1+ c < ir+2. We
require ir+1+ c ≤ n − 1 in Cn and ir+1+ c ≤ n − 2 in Dn.
Proof: We now prove (a). Suppose we want to move ir, ir+1 leftward c steps, where
ir−1 < ir− c. It is equivalent to moving them 1 step for c times, namely it suffices to
show that
(i1, ..., ik) ∼ (i1, ..., ir−1, ir− 1, ir+1− 1, ir+2, ..., ik).
(8.2)
By applying F [ir+ 1], F [ir+ 2], ..., F [ir+1− 1] consecutively to (i1, ..., ik), we get (8.2),
and (a) follows.
The proof of (b) is similar. The restrictions on Cn, Dnare added because F [n − 1]
does not change the color of n in Cn, and F [n − 2] changes the colors of n − 1, n in
Dn. 2
For example, in (1, 5, 7, 9), we can move the pair 5, 7 leftward three steps and get (1, 5, 7, 9) ∼ (1, 2, 4, 9). The following lemma provides a way to reduce the number of painted vertices.
Lemma 8.2 In An, Bn, (i1, ..., ik) ∼ (i2− i1, i3, ..., ik). If i2 ≤ n − 1, this is true in
Cn. If i2 ≤ n − 2, this is true in Dn.
Proof: We divide the arguments for (i1, ..., ik) into two cases.
Case 1: i1 = 1. If i2 = 2 then F [1](1, 2, i3, ..., ik) = (1, i3, ..., ik) and we are
done. So suppose that i2 > 2. Apply F [1], F [2], ..., F [i2 − 1] to (1, i2, ..., ik), we get
(1, i2, ..., ik) ∼ (i2− 1, i3, ..., ik). This solves Case 1.
Case 2: i1 > 1. By Lemma 8.1(a), (i1, ..., ik) ∼ (1, i2− i1+ 1, i3, ..., ik). This is
reduced to Case 1, so we get (1, i2− i1+ 1, i3, ..., ik) ∼ (i2− i1, i3, ..., ik). This solves
Case 2.
The extra conditions are imposed to deal with the special cases of F [n − 1] in Cn and F [n − 2], F [n − 1], F [n] in Dn, as explained in Lemma 8.1. This proves the
lemma. 2
Proposition 8.3 In An and Bn, (i1, ..., ik) ∼ (
Pk
p=1(−1)k−pip).
Proof: Consider (i1, ..., ik) in An or Bn. By Lemma 8.2,
(i1, ..., ik) ∼ (i2− i1, i3, ..., ik)
∼ (i3− i2− i1, i4, ..., ik)
∼ ... ∼ (Pk
p=1(−1)k−pip).
This proves the proposition. 2 Obviously (N) ∼ (n + 1 − N) in An, by symmetry of the diagram. Therefore by
Proposition 8.3, we have verified the equivalence classes of diagrams of types A and B in Table 1. The next proposition considers the type C diagrams of Table 1. The argument is similar unless the vertex n is painted.
Proposition 8.4 Consider (i1, ..., ik) in Cn.
(a) If ik < n, then (i1, ..., ik) ∼ (
Pk
p=1(−1)k−pip).
(b) If ik = n, then (i1, ..., ik) ∼ (n).
Proof: If ik < n, we can repeat the argument as in (8.3) and get the desired result.
We now consider the case ik = n, namely (i1, ..., ik−1, n). Let c = n − 1 − ik−1. Then
(i1, ..., ik−1, n) ∼ (i1, ..., ik−3, ik−2+ c, n − 1, n) by Lemma 8.1(b)
∼ (i1, ..., ik−3, ik−2+ n − 1 − ik−1, n). by F [n]
(8.4)
Thus the number of entries has gone from k to k − 1. Repeat the applications of Lemma 8.1(b) and F [n] as in (8.4), we end up with (n). 2 Most of Cn in Table 1 follow from Proposition 8.4. It remains only to check that
if (i1, ..., ik) with ik < n satisfies
Pk
p=1(−1)k−pip = n − N, then (i1, ..., ik) ∼ (N). This
can be done by modifying (8.3) to (i1, ..., ik) ∼ (i1, ..., ik−2, n − (ik− ik−1)) ∼ ... ∼
(n −Pkp=1(−1)k−pi
p) and proceed with similar arguments, or by observing that (N)
and (n − N) correspond to the Lie algebras sp(N, n − N) ∼= sp(n − N, N ) [4, p.355]. This proves Table 1 for Cn.
For Dn, the following proposition considers the various situations based on the
colors of n − 1 and n. Proposition 8.5 In Dn: (a) If ik ≤ n − 2, then (i1, ..., ik) ∼ ( Pk p=1(−1)k−pip). (b) (i1, ..., ik, n − 1, n) ∼ (1 + Pk p=1(−1)k−pip). (c) (i1, ..., ik, n − 1) ∼ (n − 1). 18
Proof: The argument for (a) is similar to An; we simply move pairs of painted
vertices to the left by Lemma 8.1(a). We perform this operation in (b), and get (i1, ..., ik, n − 1, n) ∼ ( Pk p=1(−1)k−pip, n − 1, n). By F [n − 1] followed by F [n − 2], we get (Pk p=1(−1)k−pip, n−1, n) ∼ ( Pk
p=1(−1)k−pip, n−3, n−2). This reduces to (a), and
simple operations show that the last expression is equivalent to (1 +Pk
p=1(−1)k−pip).
This proves (b).
Now consider (i1, ..., ik, n − 1) in (c). The first k painted vertices can be dealt
with as before, leaving (i1, ..., ik, n − 1) ∼ (I, n − 1), where I =
Pk
p=1(−1)k−pip. By
performing F [n − 1], F [n − 2], ..., F [I + 1] to (I, n − 1), we get (I, n − 1) ∼ (I + 1, n) ∼ (I+1, n−1). Repeating this method gives (I, n−1) ∼ (I+1, n−1) ∼ ... ∼ (n−2, n−1). Then F [n − 1](n − 2, n − 1) = (n − 1) and we are done. 2 Most equivalence classes of type D in Table 1 are covered by Proposition 8.5. The remaining cases follow from two simple observations. Firstly, (N) ∼ (n − N) because they correspond to Lie algebras so(2N, 2n − 2N) ∼= so(2n − 2N, 2N). Secondly, if exactly one of n − 1, n is painted, obviously it does not matter which of them is painted due to symmetry of the diagram.
We have checked the equivalence classes of Vogan diagrams of types A, B, C, D given in Table 1. The next section considers the diagrams of types E, F, G.
9
Exceptional Diagrams
In this section, we consider the Vogan diagrams of types E, F , G in Table 1 with θ = 1. We first treat the diagrams of En. Label the vertices as follows.
e 1 e 2 e 3 . . . e n − 1 e ∗ Lemma 9.1
(a) For q ≥ 4 and p = 2, 3, we get (p, q) ∼ (p − 1, q − 1, ∗) and (p, q, ∗) ∼ (p − 1, q − 1). (b) For q ≥ 4, (1, q) ∼ (q − 1, ∗) and (1, q, ∗) ∼ (q − 1).
Proof: For (p, q) or (p, q, ∗), where q ≥ 4, apply F [p],...,F [q − 1] to it and we get the
desired results. 2
The next proposition simplifies a Vogan diagram to one of the form (α) or (α, ∗). However it excludes the special cases in (7.1) because they are not valid in argument (9.7) below. We will deal with them seperately in Proposition 9.5. Although argument (9.7) also cannot be applied to (7.1) of E8, Propositions 9.3 and 9.5 show that they all
happen to be equivalent to (7) in E8, which coincides with the formulae in Proposition
9.2. Therefore, we need not exclude (7.1) of E8 in Proposition 9.2.
As in (7.2), the Vogan diagrams are denoted by (i1, . . . , ik, j1, . . . , jl, s), where
1 ≤ i1 < ... < ik ≤ 3 < j1 < ... < jl ≤ n − 1 and s is ∗ or empty. Throughout this
section, let I, J be defined as in (7.3), and let α = J − I if J ≥ 4 n − J − I if J < 4. (9.1)
The next proposition simplifies (i1, ...ik, j1, ..., jl, s) to (α, t), where t is ∗ or empty.
Proposition 9.2 Consider (i1, ..., ik, j1, ..., jl) or (i1, ..., ik, j1, ..., jl, ∗) other than in
(7.1). Then (i1, ..., ik, j1, ..., jl, s) ∼ (α, t), where s = t if I is even, and s 6= t if I is
odd.
Proof: For the case (i1, j1) = (3, 4), by F [3], F [2], F [1], we get (1, ∗). Now consider
the case (i1, . . . , ik, j1, . . . , jl), we may regard (i1, . . . , ik) and (j1, . . . , jl) as painted
diagrams of A3 and An−4 respectively. By Proposition 8.3, we have
(i1, ..., ik) ∼ ( k X p=1 (−1)k−pi p) = (I) in A3 (9.2) and (j1, ..., jl) ∼ ( l X p=1 (−1)l−pj p) = (J) in An−4. (9.3)
Notice that J ≥ 4 if and only if l = 1, this implies that there is a single painted vertex in {ji, . . . , jl}; and if J < 4, then the corresponding single painted vertex of
En is n − J. Let β denote the single painted vertex of En reduced from the painted
vertices {j1, . . . , jl}, then β = n − J, if J < 4 J, if J ≥ 4 and α = β − I. (9.4)
In reducing the diagrams (9.2) and (9.3), we did not use the operation F [3]. So ∗ does not occur and
(i1, ..., ik, j1, ..., jl) ∼ (I, β).
(9.5)
Since β ≥ 4 and by Lemma 9.1(a), we see that (I, β) ∼ (I − 1, β − 1, ∗) ∼ (I − 2, β − 2) ... ∼ (1, β − I + 1, ∗) if I − 1 is odd or (1, β − I + 1) if I − 1 is even . (9.6)
Hence we have (i1, ..., ik, j1, ..., jl) ∼ (I, β) by (9.5) ∼ (1, β − I + 1) if I − 1 is even (1, β − I + 1, ∗) if I − 1 is odd by (9.6) ∼ (β − I, ∗) if I is odd (β − I) if I is even by Lemma 9.1(b) ∼ (α, ∗) if I is odd (α) if I is even . by (9.4) (9.7)
The use of Lemma 9.1(b) in (9.7) requires β − I + 1 ≥ 4, which is not valid for the diagrams in (7.1). This is the reason which excludes them from this proposition.
By (9.7), we solve the case (i1, ..., ik, j1, ..., jl). The case of (i1, . . . , ik, j1, . . . , jl, ∗)
follows from similar argument. This completes the proof. 2 The above proposition shows how a Vogan diagram is equivalent to one of the form (α) or (α, ∗). The next two propositions deal with (α, ∗) and (α) respectively. Proposition 9.3 The Vogan diagrams of the form (α, ∗) are equivalent to diagrams with single painted vertex in the following table.
(α, ∗) E6 E7 E8 (1, ∗) (2, ∗) (5) (6) (7) (3, ∗) (∗) (4, ∗) (1) (5, ∗) (5) (6) (7) (6, ∗) — (1) (7) (7, ∗) — — (1) Table 3 22
Proof: For (1, ∗), we apply F [1], F [2], ..., F [n − 1] consecutively and get (1, ∗) ∼ (1, 2, ∗) ∼ (2, 3, ∗) ∼ (3, 4) ∼ ... ∼ (n − 1). (9.8)
For (2, ∗), we apply F [∗] to it and get (2, 3, ∗), then proceed as in (9.8). Clearly (3, ∗) ∼ (3). For (4, ∗), we apply F [∗], F [3], F [2], F [1] to it and get (4, ∗) ∼ (1).
We next show that (5, ∗) ∼ (2, ∗), so that we can proceed with (2, ∗) as above. By F [∗], F [3], F [4], we get (5, ∗) ∼ (2, 4). By Lemma 9.1(a), (2, 4) ∼ (1, 3, ∗). Then apply F [1], F [2] to (1, 3, ∗) we get (2, ∗). This solves (5, ∗).
We now consider (6, ∗) in E7 and E8. In E7, apply F [6], ..., F [1] consecutively to
(6, ∗) and we get (1). In E8, by Lemma 9.1(b), (6, ∗) ∼ (1, 7). Apply F [7], F [6], ..., F [2]
to (1, 7) and we get (2, ∗). This solves (6, ∗).
Finally for (7, ∗) in E8, we apply F [7], ..., F [1] to it and get (1). This proves the
proposition. 2
By Propositions 9.2 and 9.3, we have simplified all type E diagrams to single painted vertex diagrams. We consider these single painted vertex diagrams in the following proposition.
Proposition 9.4
(a) E6 has two equivalence classes (1) ∼ (5) and (2) ∼ (3) ∼ (4) ∼ (∗).
(b) E7 has three equivalence classes (6), (1) ∼ (2) ∼ (3) ∼ (5) and (4) ∼ (∗).
(c) E8 has two equivalence classes (1) ∼ (4) ∼ (5) ∼ (∗) and (2) ∼ (3) ∼ (6) ∼ (7).
Proof: We only have to prove the equivalence claimed in this proposition. The in-equivalence of different groupings follows from [4]. For example, [4, p533-534] says that (1) and (∗) in E6 are not equivalent.
We first claim that (∗) ∼ (4) in all En:
(∗) ∼ (3, ∗) apply F [∗]
∼ (2, 5, ∗) by Proposition 9.2 ∼ (4). apply F [3], F [4] (9.9)
Hence (∗) ∼ (4) as claimed. In the following we consider E6, E7, E8 seperately.
In E6, clearly (1) ∼ (5) and (2) ∼ (4) by symmetry of the diagram. So by (9.9)
it suffices to show that (3) ∼ (∗). By applying F [3], F [4], F [5] to (3) we get (2, 5, ∗), and by Proposition 9.2, (2, 5, ∗) ∼ (3, ∗). Clearly (3, ∗) ∼ (∗). This proves (a).
We next consider E7 in (b):
(3) ∼ (3, 6, ∗) by Proposition 9.2 ∼ (4, ∗) apply F [6], F [5], F [4] ∼ (1). by Proposition 9.3 We conclude that (3) ∼ (1). Next we claim that (2) ∼ (3): (2) ∼ (1, 3) apply F [2], F [1]
∼ (2, 4, ∗) by Lemma 9.1(a) ∼ (3). apply F [∗], F [3] Hence (2) ∼ (3) as claimed. Finally, we prove that (5) ∼ (2):
(5) ∼ (1, 6, ∗) by Proposition 9.2
∼ (2). apply F [6], F [5], . . . , F [2] Together with (9.9), this proves (b).
Finally, we consider E8 in (c):
(5) ∼ (2, 7) by Proposition 9.2 ∼ (3, ∗) apply F [7], F [6], ..., F [3] ∼ (∗). apply F [∗]
On the other hand,
(4) ∼ (3, 7, ∗) by Proposition 9.2 ∼ (4, ∗) apply F [7], F [6], ..., F [4] ∼ (1). by Proposition 9.3
Recall that (4) ∼ (∗) by (9.9), so we conclude that (1) ∼ (4) ∼ (5) ∼ (∗). We next check the other equivalence class (2) ∼ (3) ∼ (6) ∼ (7):
(6) ∼ (1, 7, ∗) by Proposition 9.2 ∼ (2) apply F [7], F [6], ..., F [2] ∼ (1, 4, ∗) apply F [2], F [3], F [∗] ∼ (3) by Proposition 9.2 ∼ (3, 6, ∗) by Proposition 9.2 ∼ (6, ∗) apply F [∗] ∼ (7). by Proposition 9.3
That is, (6) ∼ (2) ∼ (3) ∼ (7). This completes the proof. 2 The next proposition deals with the Vogan diagrams in (7.1). They have been excluded by Proposition 9.2.
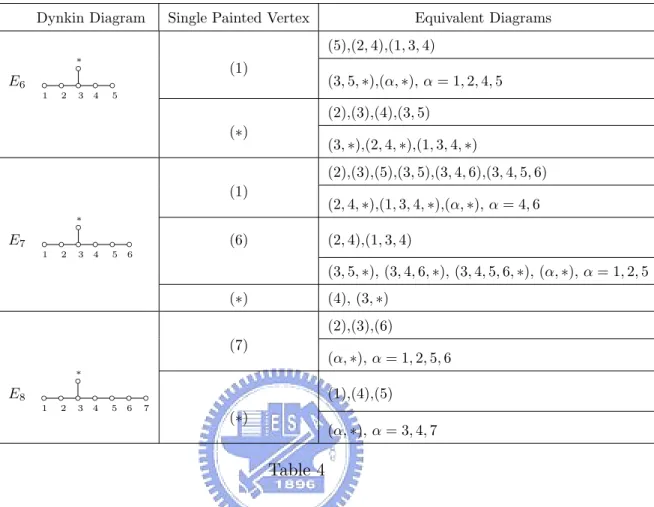
Proposition 9.5 The equivalence classes of the Vogan diagrams in (7.1) are given in Table 4 below. In particular, each of them is equivalent to (n − 2, ∗) or (n − 2). Proof: In all En,
(3, 5, ∗) ∼ (2, 4) by Lemma 9.1(a) ∼ (1, 3, 4) apply F [2], F [1]
∼ (1, n − 1) apply F [4], ..., F [n − 1] ∼ (n − 2, ∗). by Lemma 9.1(b)
The equivalence class of (n − 2, ∗) is given by Proposition 9.3. By similar arguments we have (3, 5) ∼ (2, 4, ∗) ∼ (1, 3, 4, ∗) ∼ (n − 2). The equivalence class of (n − 2) is given by Proposition 9.4. And clearly, in E7, (3, 4, 6) ∼ (3, 4, 5, 6) ∼ (3, 5) and
(3, 4, 6, ∗) ∼ (3, 4, 5, 6, ∗) ∼ (3, 5, ∗). This completes the proof. 2 By Propositions 9.2, 9.3, 9.4 and 9.5, we have completely characterized all the equivalence classes of Vogan diagrams of type E. We summarize these results in the
following table. Recall that α is defined in (9.1).
Dynkin Diagram Single Painted Vertex Equivalent Diagrams (5),(2, 4),(1, 3, 4) E6 b 1 b 2 b 3 b 4 b 5 b ∗ (1) (3, 5, ∗),(α, ∗), α = 1, 2, 4, 5 (2),(3),(4),(3, 5) (∗) (3, ∗),(2, 4, ∗),(1, 3, 4, ∗) (2),(3),(5),(3, 5),(3, 4, 6),(3, 4, 5, 6) (1) (2, 4, ∗),(1, 3, 4, ∗),(α, ∗), α = 4, 6 E7 b 1 b 2 b 3 b 4 b b 6 5 b ∗ (6) (2, 4),(1, 3, 4) (3, 5, ∗), (3, 4, 6, ∗), (3, 4, 5, 6, ∗), (α, ∗), α = 1, 2, 5 (∗) (4), (3, ∗) (2),(3),(6) (7) (α, ∗), α = 1, 2, 5, 6 E8 b 1 b 2 b 3 b 4 b b 6 5 b ∗ b 7 (1),(4),(5) (∗) (α, ∗), α = 3, 4, 7 Table 4
Table 4 summarizes the following method to determine the equivalence class of a Vogan diagram of En:
(1) Diagrams belong to the special cases (7.1):
Use Proposition 9.5 to reduce it to the form (n − 2, ∗) or (n − 2), then use Proposition 9.3 or 9.4 to find the equivalence class. The result is in Table 4. (2) Diagrams not in (7.1):
Write it as (i1, ..., ik, j1, ..., jl, s), then use (7.3) and (9.1) to compute I, J, α.
Use Proposition 9.2 to reduce it to (α, ∗) or (α). The equivalence classes of (α, ∗) and (α) are given in Propositions 9.3 and 9.4, and are summarized in Table 4.
Methods (1) and (2) here correspond to methods (1) and (2) for Table 1. The methods for Table 4 have been simplified to the various cases of Table 1.
For example, consider (1, 2, 3, 5, ∗) in E7. It does not belong to (7.1), so we
compute
I = i3− i2+ i1 = 3 − 2 + 1 = 2, and J = j1 = 5 > 4,
hence α = J − I = 3. Since I is even, by Proposition 9.2, (1, 2, 3, 5, ∗) ∼ (3, ∗). By Proposition 9.3, (3, ∗) ∼ (∗). So Table 4 shows that (1, 2, 3, 5, ∗) ∼ (∗) in E7.
Alternatively, from j1 = 3 + I and I + s = 2 + ∗ is odd, we find (1, 2, 3, 5, ∗) ∼ (∗) in
E7 of Table 1.
We next consider the Vogan diagrams of F4. We label the vertices as follows.
e 1 e 2 e 3 i e 4
Proposition 9.6 In F4, (i1, . . . , ik) ∼ (1) if and only if {i1, . . . , ik} ∩ {1, 2} 6= ∅.
Proof: Suppose that (i1, . . . , ik) does not contain 1 or 2. That is (3, 4) ∼ (4) or (3).
It follows either from [4, p541-542] or Theorem 1 later that (3) 6∼ (2) and (3) 6∼ (1). By applying F [4], F [3] on (4) we get (3). Conversely, (1) ∼ (1, 2) by F [1] ∼ (2, 3) by F [2] ∼ (2, 3, 4) by F [3] ∼ (2, 4) by F [4] ∼ (1, 2, 3, 4) by F [2] ∼ (1, 2, 3) by F [3] ∼ (2). by F [2] (9.10) And clearly, (1, 2, 3, 4) ∼ (1, 3, 4) ∼ (1, 4) ∼ (1, 2, 4) and (1, 2, 3) ∼ (1, 3). (9.11)
All cases of {i1, . . . , ik}∩{1, 2} 6= ∅ are considered in (9.10) and (9.11), this completes
the proof. 2
Proposition 9.6 shows that there are only two equivalence classes of Vogan dia-grams of F4 as listed in Table 1.
It is clear that all paintings on G2 (unless we keep all vertices unpainted) are
equivalent to one another. This can be checked by the performing various F [i], or by looking at its painted root system.
10
Nontrivial Involutions
In this section we study the equivalence classes of the Vogan diagrams with nontrivial involutions, and prove the informations in Table 2.
The condition θ 6= 1 restricts the underlying Dynkin diagrams to An, Dn and E6.
We also ignore the diagrams without painted vertex, since they cannot be equivalent to one with painted vertices. So the possibilities for θ 6= 1 and with painted vertices are limited to An (n odd), Dn and E6. We may not paint vertices that are not fixed
by θ (since compactness of roots makes sense only on the imaginary ones). We label the vertices as in Table 2. The only way to paint An(n odd) is by painting the vertex
n + 1
2 , so it is not equivalent to any other diagram.
Next we consider Dn with vertex N painted, where N ≤ n − 2. In the previous
case where θ = 1, we have shown in Proposition 8.5(a) that (N) ∼ (i1, ..., ik) for N = k X p=1 (−1)k−pi p and ik ≤ n − 2. (10.1)
This argument uses F [i] for i ≤ n − 3. In general, F [i] differs in the cases θ = 1 and θ 6= 1 only if a vertex adjacent to i is not fixed by θ. Therefore, since n − 1 and n are the only vertices not fixed by θ here, the arguments in Proposition 8.5(a) is still valid in our present situation. Namely we also have (10.1) for θ 6= 1. Also, (N) ∼ (n − N − 1) because they represent the Lie algebras so(2N + 1, 2n − 2N − 1) ∼= so(2n − 2N − 1, 2N + 1). This proves Dn in Table 2.
Finally in E6, there is only one equivalence class with θ 6= 1 and with some vertices
painted [4, p532-535]. Therefore all such cases are equivalent to one another. This completely verifies Table 2.
11
Graph Paintings
This section develops an idea in the opposite direction: The Vogan diagrams can classify almost all the simply-laced Dynkin diagrams. Since we are interested in the underlying Dynkin diagrams, we may consider only the Vogan diagrams with θ = 1 in this section.
Recall that the algorithm F [i] in (8.1) is used to reduce the number of painted vertices within an equivalence class of Vogan diagrams until we end up with a single painted vertex. This is not so surprising, by the following theorem.
Theorem 1 Two Vogan diagrams with θ = 1 are equivalent if and only if one can be transformed to the other by a sequence of F [i] operations.
Proof: The “if” part of the theorem is obvious, since F [i] preserves equivalence classes. The converse has been verified explicitly for each Dynkin diagram in §§2, 3 when we check Table 1. We now give a more intrinsic argument which does not take into account the shapes of the Dynkin diagrams. Recall that two equivalent Vogan diagrams correspond to the same Lie algebra under different choices of Weyl chambers. The Weyl group W acts transitively on the chambers, and so it acts transitively on each equivalence class of Vogan diagrams. Since θ = 1, all roots are imaginary, and they are either compact or noncompact. Let Wc and Wn denote the
subgroups generated by reflections about the compact and noncompact simple roots respectively. Clearly W is generated by Wc and Wn. Further, since Wc acts trivially
on the Vogan diagrams, it follows that Wn acts transitively on each equivalence class
of Vogan diagrams. Since F [i] corresponds to reflection about the noncompact simple root labelled i, this proves the theorem. 2 The proof of this theorem does not make use of knowledge on the shapes of the Dynkin diagrams. Therefore, if we accept the Borel-de Siebenthal theorem, then it gives a necessary condition for a connected graph to be a Dynkin diagram:
Corollary 1 If a connected graph Γ is a Dynkin diagram, then
(a) Every painting on Γ can be simplified via a sequence of F [i] to a painting with single painted vertex;
(b) Every connected subgraph of Γ satisfies property (a).
Proof: To prove (a), let Γ be a Dynkin diagram. Suppose that p is a painting on Γ. By the Borel-de Siebenthal theorem, (Γ, p) ∼ (Γ, s), where s paints just a single vertex of Γ. By Theorem 1, (Γ, p) can be transformed to (Γ, s) with some sequence of F [i] operations. This proves (a). Since connected subgraphs of a Dynkin diagram correspond to simple subalgebras, condition (b) is trivial. The corollary follows. 2 The corollary provides an obstruction for a graph to be Dynkin via conditions (a) and (b). We shall see that they come close to being sufficient conditions. The simply-laced Dynkin diagrams are classified by showing that they cannot contain the following subgraphs: c c¢¢ c p pp pp ... p ppp AA c p c%% e e c c e e c % % c c % % e e c c . . . c%% c e e c c c c c c c c c c c c c c c c c c c c c c c c c (11.1)
In the top row of (11.1), the first two diagrams say that a Dynkin diagram has no loop and no node (branch point) with more than three edges. The third diagram says that there is at most one node. In this case we can topologically think of the node as being joined to three “lines” l1, l2, l3 whose lengths are defined in the obvious
manner. The fourth diagram of the top row says that one of the li, say l1, is of length
1. Then the remaining diagrams put some restrictions based on the lengths of l2 and
Corollary 1(b) says that a connected subgraph of a Dynkin diagram is again Dynkin; so it suffices to show that the six graphs in (11.1) are not Dynkin. We attempt to use Corollary 1(a) to achieve this; namely we find a painting which cannot be simplified to a graph with single painted vertex via the algorithms F [i]. Such attempt is successful for all but one of them:
s s¢¢ c p pp pp ... p ppp AA c p s%% e e s c e e c % % s s % % e e s s . . . c%% c e e c c s c c c s c s c c c c c s c (11.2)
For instance in the loop in (11.2), no matter how we apply F [i], we always end up with a loop with two painted vertices. So we conclude that every Dynkin diagram cannot contain any loop. Unfortunately, in the last graph of (11.1), any painting can be reduced to a diagram with a single painted vertex. This “fake E9” is the only
structure which does not exist in Dynkin diagrams but cannot be dismissed by the algorithms F [i].
References
[1] P. Batra, Invariants of real forms of affine Kac-Moody Lie algebras, J. Algebra 223 (2000), 208-236.
[2] P. Batra, Vogan diagrams of real forms of affine Kac-Moody Lie algebras, J. Algebra 251 (2002), 80-97.
[3] A. Borel and J. de Siebenthal, Les sous-groupes ferm´es de rang maximum des groupes de Lie clos, Comment. Math. Helv. 23 (1949), 200-221.
[4] A. W. Knapp, Lie Groups Beyond an Introduction, Progress in Mathematics 140, Birkh¨auser 1996.
![TraditionalMLCalgorithmsmainlytacklethebatchMLCproblem,wheretheinputdataarepresentedinabatch[24,28].Nevertheless,inmanyMLCapplicationssuchase-mailcategorization[22],multi-labelexamplesarriveasastream.Onlineanalysisistherefore dimensionreducermotivatedbyma](data:image/gif;base64,R0lGODlhAQABAIAAAP///wAAACH5BAEAAAAALAAAAAABAAEAAAICRAEAOw==)