Efficient Allocation of Testing Resources for Software Module
Testing Based
on
the Hyper-Geometric Distribution Software
Reliability Growth Model
Rong-Huei Hou
&
Sy-Yen Kuo
Department
ofElectrical Engineering
National Taiwan University
Taipei, Taiwan,
R.O.C.
Email: [email protected]
Abstract
Considerable amount of testing resources is required
during software module testing. I n this paper, based on the Hyper-Geometric Distribution software reliabil- ity growth Model (HGDM) we investigate the follow- ing two optimal resource allocation problems i n soft-
ware module testing: 1) minimization of the number o f
software faults still undetected in the system after test-
ing given a total amount of testing resources, and 2)
minimization of the total amount of testing resources
required given the number of software faults still unde-
tected in the system after testing. Furthermore, based
on the concepts of average allocation and proportional
allocation, two simple allocation methods are also in- troduced. Experimental results show that the optimal allocation method can improve the quality and relia-
bility o f the software system much more significantly
than the simple allocation methods can. Therefore, the optimal allocation method is very eficient for solving the testing resource allocation problem.
1. Introduction
A software system usually consists of many complex software modules, and the software testing phase is di- vided into three successive stages El]: module test>ing, integration testing, and system testing. Considerable amount of testing resources is required during software module testing. These resources are man-power, CPU time, number of test cases, etc. To develop a quality and reliable software system, a project manager has to determine in advance the optimal way to allocate the testing resources for each module [2-41.
In literature, many Software Reliability Growth Models (SRGMs) which describe the relationship be- tween the cumulative number of detected faults and the duration of the testing have been proposed [5-
Yi-Ping
Chang
Department of Business Mathematics
Soochow University
Taipei, Taiwan, R.O.C.
71. The Hyper-Geometric Distribution software reli-
ability growth Model (HGDM) was first proposed by Tohma et al. [8]. A series of studies on the HGDM
have been made recently [9-141.
In this paper, based on the HGDM with logistic learning factor [la] we investigate two optimal re- source allocation problems in software module test- ing: 1) minimization of the number of software fault- s still undetected in the system after testing given a total amount of testing resources, and 2) minimiza-
tion of the total amount of testing resources required given the number of software faults still undetected in the system after testing. Two efficient and novel optimization algorithms based on the Lagrange mul- tiplier method [15] for the above two problems will be proposed, respectively. Furthermore, based on the concepts of average allocation and proportional allocation, two simple allocation methods, the aver- age allocation method and the proportional allocation
method. will also be introduced, respectively. Experi- mental results show that the optimal allocation meth- ods can improve the quality and reliability of the soft- ware system much more significantly than the simple allocation methods can. Therefore, the optimal allo- cation methods are very efficient for solving the testing resource allocation problem.
The organization of this paper is as follows. Section
2 briefly reviews the HGDM with logistic learning fac- tor. Based on this model, two optimal resource alloca- tion problems in software module testing are discussed in Section 3. The relationship between the optimal,
average, and proportional resource allocation meth- ods is investigated in Section 4. Numerical examples are presented for comparison in Section 5 followed by
the conclusions in Section 6 .
Notations
mj
,
m expected number of initial software faults in module j and the whole system, respectively ti the it” test instance,i
= 1 , 2 , .. .
where i rep-resents the order of application
Wi number of faults newly detected or redetect- ed by ti
q j , Q amount of testing resources allocated t o module j and the whole system during the application of tk, respectively
Q
(q11~2,..
. 1 q M ) ; vector of q jif A occurs
I ( A )
{
;;
otherwisep,,,, ,ai , b j parameters of the HGDM with logistic
learning factor in module j
p,,,J~(qj>O)/(l+e-q~(a~i+b~)),j=1,2,. . . , M expected number of software faults undetect- ed in module j and the whole system after the application oftl,t2,..
.
, t k , respectivelyweighting factor for module j mj -pi,;>
number of faults in module j and the w- hole system detected after the application of t l , t 2 , . .. , t k , respectively a , k + b j , j = 1 , 2 , . . . , A 4 ~ j m ; p , , , ~ ~ ; , j = 1 , 2 , . . .
,
M e - “ J ‘ J f , j = 1 , 2 ,...,it4 Lagrange multiplier Lagrangeanoptimal solution of the resource allocation problem
qi #
,
qJ,avg, . q j , p r o p amount of testing resources allocat-ed t o module j during the application of tk by the optimal, average, and proportional al- location methods, respectively
Z,,,
,
Zavg,
Zprop number of software faults still unde-tected in the whole system estimated by the optimal, average, and proportional allocation methods, respectively
Assumptions
A software system is composed of M modules and each module is tested independently.
For each module, faults already detected so far by t l , t 2 ,
.
. .
,
t k - 1 have been collected. Based on these faults, the parameters of each module, mj ,P , , ~ , a j , and bj for j = 1 , 2 , . . .
,
M , can be esti-mated [12].
T he manager has to decide how t o allocate the testing resources to each module during the ap-
plication of test instance t k ,
2. HGDM with Logistic Learning Factor
lo].
In this section, we briefly review the HGDM [8- At the beginning of the test/debug stage, m
initial faults are resident in the program. With the application of “test anstances”, faults can be detect- ed by the testers. The collection of test operations performed in a unit of time (one day, one week,
.
.
.) is called a “test instance”. At the end of a test in- stance ti, each fault will be classified into one of the following two categories, newly detected faults or re- detected faults. Some of the faults detected by ti may have already been detected by the application of tl,t2,..
.
,ti-l. Therefore, the number of faults newly detected by ti is not necessarily equal to wi.The exact development of the model in terms of mathematical equations has been shown in [8-lo]. The mean value function of the HGDM is given by
2 2
W ’
ECi
=
m [ l - n(l - L)] = m [ l - n ( 1 -pj ),
(1) mj = 1 j = l
with ECo = 0 where p ; = wi/m, i = 1 , 2 , .
.
..Various functions for the learning factor p; have been proposed in [8-lo]. To make the HGDM more realistic and practical, a logistic learning factor based on the S-shaped learning curve was proposed in [12]. The logistic learning factor is
where ui
>
0 represents the testing resource consumed in t i . Note that if there is no testing resource used in ti (i.e., U ; = 0), obviously no faults can be detected(i.e., wi = pi = 0). Therefore, it is reasonable that Eq.(2) can be modified to be
i = 1 , 2 ,
. . . .
(3) pi = PL, 1 + e - u , ( a i + b )I(?&
>
0)3. Two Optimal Resource Allocation Problems
To improve the quality and reliability of a software system, the manager of software development has to effectively apportion the testing resources among the modules [a-41. In this section, based on the HGDM with logistic learning factor, two optimal resource al- location problems in software module testing are dis-
cussed.
3.1. Minimizing the number of undetected
faults
In this subsection, we study the following problem. Assuming that the total amount of testing resources for software module testing is given, the manager has to allocate these resources t o each module to minimize the number of software faults still undetected in the whole system after the application of t l ,t z , .
. .
,tk [2-41.Let the amount of resources allocated to module j during the application of t k be q j , from Eq.(3) it is
obvious that
Let C j , k denote the number of software faults in mod-
ule j already detected so far by t l , t z ,
...,
t k . FromEqs.(l) and (4), the expected value of C j , k denoted
by E C j , k is [S-101
(5)
{
~ ~ j , k = m j [ 1 - n i " = , ( 1 - p j , i ) ] , j= 1 , 2 , ..
. , M . ECj,o = 0,Therefore, the number of software faults still undetect- ed in module j after the application o f t 1 , t 2 , .
. . ,
t k canbe estimated by Eqs.(4) and (5) as:
k - 1
zj = m j
-
E C j , k = {mj n ( 1 - p j , i ) } ( l - P j , k )d = l
Note that mj. represents the expected number of soft- ware faults still undetected in module j after the appli-
cation of t l , t ? , .
.
.
, t k - l . Suppose the total amount oftesting resources for module testing is Q, from Eq.(6) this allocation problem can formulated as:
Min
M
subject to q j = Q,
j = 1
q j
2
0, j = 1 , 2, . . . , IM.
Note that w j is a weighting factor to represent the relative importance of a fault detected from module j in the future. This problem can be easily rewritten in
a more compact formulation (called Problem P l ) :
M
subject to x q j = Q , (9)
j = 1
q j > o , j = 1 , 2 .
, . . ,
M .Ignoring the constraint q j
2
0 and using the La- grange method 1151, Problem P1 is equivalent t o find the maximum ofFor convenience, we consider another problem (called Problem Pl'):
M
subject to Cqj =
Q,
j = 1
qj 2 0 , j = 1 , 2
,.",
M . Ignoring the constraint qj2
0 and using the Lagrange method [15], Problem P1' is equivalent to find the maximum ofAccording t o the Kuhn-Tucker conditions [15], the necessary conditions Al-A3 for a maximum of Eq.( 10) to exist are as follows:
A2: X
<
0.For Condition A l , from Eq.(lO) we have
T hat is,
Since a;
>
0 and q j should be larger than or equal to zero for j = 1 , 2,...,
M , we have Aj>
0 and 0<
Bj5
1 for j=
1 , 2 , .. . ,
M . Therefore, fromEq.(12) we have X
<
0 (i.e., Condition A2 is satisfied) andSince 0
<
Bj5
1, from Eq.(13) we can easily obtainThat is,
(15) - - < < < O , j = 1 , 2 Ai , . . . , M .
Step 2 . (i) If max S M ( X ) = X > _ - A M / ~
From Eq.(13), we have
(16)
X
-(1+ B j ) 2
+
Bj = 0.4
Since 0
<
Bj5
1 and -1/45
X/Aj<
0, the root of Eq.(16) isTherefore, from Eq.( 17) we have
Let
where
1-J-
2 X / A j
By simple calculation, we have the following lemma.
Lemma 1.
(i) sj(X) is decreasing in A; (ii) lim sj(X) = -CO;
X-0-
(iii) lim sj(X)=O, where sj(X) is given in Eq.(21).
n
A+ - A, 14
U
L
Since SL(X) =
Cjz1
sj(X) and sj(X) is decreasing in A, SL(X) is decreasing in X for L = 1,2, . .. ,
M . S-ince X
2
- A j / 4 for j = 1,2,.. .
,
M , for conveniencewe rearrange the indices of A j ' s such that Ai
2
A22
.
. . 3
A M . Moreover, from Eq.(21) we have s j ( X )<
0 for all j , and SM(X) and S M - ~ ( X ) are shown in Figure 1, where a~ = max SM(X) = S M ( - A M / ~ ) andCYM-l= max SM - 1 (A) = SM - 1 (-A~-i/4).
To satisfy the constraint q j = Q (i.e., Condi-
tion A3) and based on Figure 1, the main steps for
finding the maximum of Problem P1 is depicted in
the following:
X > _ - A M / ~
- A M / 4 > X > - A ~ - 1 / 4
Step 1. Rearrange the indices of A,'s such that A i
2
A2
2
.. . 2
A M . (ii) Step 3. (i) (ii) M 1 - m z )>-&,
j=1c
i q - 1 -
-Z&there exists a unique root A# (here, A#
2
AM/^) such that
SM(X#)
=-Q
andhence we are done. The optimal solution Q#for Problem P1' is
q#=-- 1 In
(
-1l - d m ) .
, J = 1,2,..
.( M .3 a; 2 X # / A j
Since q:
>
0 , j = 1,2,..
. ,
M , the optimal solution for Problem P1 is also &#.If max SM(X) =
X > _ - A M / ~
, -
we have X
<
- A M / ~ and-hence from Eq.( 12)AM AM + A
<
- - -= o ;
A M B M (1+
BM)' 4 4 that is, (22) W Q l X )<
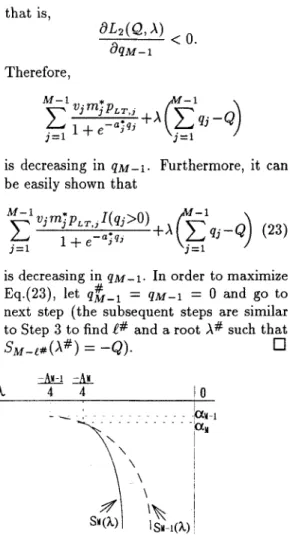
0. a q M Therefore, L2(Q,X) is decreasing in QM.Furthermore, i t can be easily shown that
L1
( Q , A) is also decreasing in q w . To max- imize L ~ ( Q , x ) , let qz = QM =o
(sinceq M
2
0) and go to Step 3.If max sM-l(X) =
- A M M / ~ > X > - A M - I / ~
there exists a unique root A # (here,
AM/^
>
2
- A ~ - 1 / 4 ) such thats M - 1 ( X # ) =
-&
and hence we are done.The optimal solution &# for Problem P 1 is
we have X
<
-A&f-1/4 and then from Gq.(12) we have
A M - 1 B M - I
AM-l AM-1 - 0; 2 + A < - - - -
that is.
Therefore,
is decreasing in QM-1. Furthermore, it can be easily shown that
is decreasing in q M - 1 . In order to maximize Eq.(23), let q M V 1 = qM-1 = 0 and go to
next step (the subsequent steps are similar t o Step 3 t o find
e#
and a root A# such that#
S M - ~ # ( A # ) = -&).
cl
* *
h 4 4 I n
- -
Figure 1. Functions of SM (A) and S M - 1 (A). Based on the above description, we propose an ef- ficient and novel optimization algorithm (called Al- gorithm l ) to determine the optimal solution for the resource allocation Problem P 1 .
Algorithm 1:
Step 1.
Step 2. Step 3.
Rearrange the indices of Aj’s such that A1
2
A22 . .
. >
AM2
AM+^
=
0 (here,AM+^
=
0 isa dummy variable). Let
e
= 0.(let t# =
t) there exists
a unique root A# such that SM -e #( A # ) = -Q and the optimal solution Q# is# -
j = 1 , 2 , . . . , M
-
e#;
otherwise, let Q , , , ~ - ~ + ~ -q M - e + l = 0, set t +
e
+
I , and go to Step 3.Cl
In general, such linearly constrained minimization problem can be solved by the successive quadratic pro- gramming method based on the iterative formulation and solution of quadratic programming subproblems
[ 1 6 ] . However, this method is complex. On the con-
trary, in Algorithm 1 the first
e#
-
1 iterations just do simple numerical comparisons. In the L#th itera- tion, sinceSM-e#(A)
is decreasing inA,
there must exist a unique rootA#
such that SM-e#(A#) = -Qand hence the optimal solution
Q#
can be obtained. Note that A# can be easily obtained by simple nu- merical analysis. Therefore, Algorithm l is quite sim- ple, efficient, and novel. By Lemma 1 it can be eas- ily shown that this algorithm always converges in, a t worst, M-1 steps. The value of the objective functiongiven by Eq.(7) with the optimal solution
Q#
is3.2.
sources
Minimizing the amount of testing re-
In this subsection, we consider another resource al- location problem. Assuming that the number of soft- ware faults still undetected in the whole system after the application of tl, t 2 ,
. .
.
,
t k is less than or equal t o2. The project manager has t o allocate an appropri-
ate amount of testing resources to each module during the application of t k t o minimize the total amount of testing resources required throughout module testing From Eq.(6), this resource allocation problem [2-41.
(called Problem P 2 ) can be formulated as:
Min Eqj j = 1
q j 2 0 , j = l , 2
,...,
M .Note th at from Eq.(25) we have
Th at is, it is impossible to reduce the number of soft- ware faults still undetected in the whole system to
E,”=,
v j m j r ( 1-
p L T v , ) after the application of test in-stance t k no matter which resource allocation method is used. This phenomenon is the limitation of the HGDM with logistic learning factor model.
Ignoring the constraint q j
2
0 and using the La-grange method [15], Problem P2 is equivalent to find the minimum of
For convenience, we consider another problem (called Problem P2’):
Rilin c q j
j = 1
q j
2 0 ,
j = 1 , 2 , . . . , M .Ignoring the constraint q j
2
0 and using the Lagrangemethod [15], Problem P2’ is equivalent to find the minimum of
The necessary conditions B1-B3 for a minimum of E- q.(27) to exist are as follows [15]:
B2: X
>
0.M
For Condition B1, from Eq.(27) we have
Aj Bj
= 1 - X = O , j = 1 , 2 , . . . , M(29) (1
+
B j ) 2Since q j should be larger than or equal t o zero, we have 0
<
B35
1 for j = 1 , 2 , .. . ,
M . Therefore, fromEq.(29) we have X
>
0 (i.e., Condition B2 is satisfied) andR 1
Since 0
<
B35
1, from Eq.(30) we can easily obtain (31)4
X > - , j = l , 2 , . . . , 1
M.
4
and the root of Eq.(30) is
where Xj” = -l/(XAj). Therefore, we have
l j = 1 1 2 , . . . , M . (33) Let
(34)
where
By simple calculation, we have the following lemma. Lemma 2.
(i) r j ( X ) is decreasing in A; (ii) iim r j ( X ) = vjmj’(1
-
p L T , , ) ;A-00
1
(iii) lim r j ( X ) = vjmj”(1 - -), where r j ( X ) is
- + 4 / ~ , ’PL,~,
given in Eq.(35). 0
Since X
2
4/Aj for j = 1 , 2 , . . . , M , for conveniencewe rearrange the indices of Aj’s such that A1
2
A22
. . .
2
-4.?f. By Lemma 2 we haveM
C v j m ; ( 1 - PLT,,)
I
R M ( X ) _<Since
RL(X)
=CF.-1r3(X)
and r j ( X ) is decreasingin A . RL(X) is decreasing in
X
for L = 1 , 2 , , M . Furthermore, from Eq.(35) we have y3(X)>
0 forall J , and from Eq.(36) RM(X) and R ~ . I - ~ ( X ) are M
constraint
xEl
.jmj.(l-p,T,,/(l+e-Q;q’)) =z
(i.e., Condition B3) and based on Figure 2, the main stepsfor finding the minimum of Problem P2 are depicted in the following:
Step 1 . Rearrange the indices of Ai’s such that A1
2
A2
2
. ..
2
A M . Step 2. (i) (ii) (iii) Step 3. (i) ( i i ) IfxEl
v j m g ( 1 - p L T , , )2
Z , it is impossi- ble to reduce the number of still undetected software faults t oZ
after the application of test instance t k .If v j m j ” ( 1 - p L T , ) )
<
z
5
exists a unique root A # (here, A#
2
4 / 4 4 )such that R M ( A # ) = Z and hence we are done. The optimal solution &# for Problem P2 is
Since ( ( ~ 1 ~ 2 , . . . A M ) : ( q l , q z r . . . , Q M ) satis- fies Eq.(25)} is the subset of { ( q l , q z , . . . , Q M ) :
( q l , 4 2 . .
. .
,
q M ) satisfies Eq.(26)} and q,#>
0, j = 1 , 2 , .. . ,
M , the optimal solution for Problem P2 is also&#.
have
X
<
AM
and hence from Eq.(29) wew M m h and hence we are done. The optimal
solution Q# for Problem P2 is
Z
-
u M m ; M , we have A<
4 / A ~ - 1 and then from Eq.(29) we haveA M - 1 B M - 1 1-A (1
+
Bnci-1)’-
th at is, 4 A M - I B M - I>o;
>
1--AM-^
(1+
B M - I ) ~-
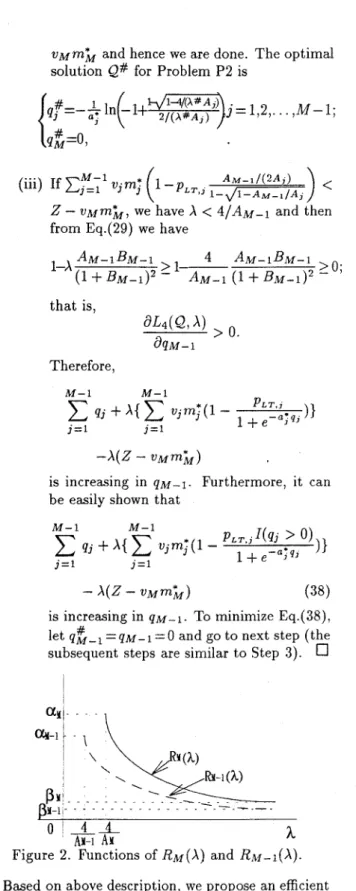
a L 4 ( a A )>
0. a q M - 1 Therefore,-A(z
-
W M m h )is increasing in q ~ - l . Furthermore, it can
be easily shown that
have
1 - X
is increasing in Q M - ~ . To minimize Eq.(38),
subsequent steps are similar t o Step let q M - l # 3).
0
= q ~ - l = O and go t o next step (the
A M B M
>
4 AMBM>
o;
( 1
+
B . w ) 2-
A M (1+
B M ) ~-
that is,(37)
Therefore, I d 4 ( Q , A) is increasing in Q M .
Furthermore] it can be easily shown that
L3(Ql A) is also increasing in q ~To . mini- mize Ls(Q,A), let q$ = q~ = 0 and go to Step 3.
If
z!LL1
vjmj”(1 - p,,,,)2
z
- v M m h , itis impossible to reduce the number of stil- l undetected software faults to
Z
after the application of test instance t k .a y j . . . . I RY-l(h) \ ! - . - . . - . . . - _ _ . 0
i 4 4
AY-i AYh
Figure 2. Functions of R M ( A ) and R M - ~ ( X )
Based on above description, we propose an efficient and novel optimization algorithm (called Algorithm
2) to determine the optimal solution for the resource
allocation Problem P2.
If
I:!‘
u3m;(1-
p,,,,)<
z
-
v Mm bI
.If - 1 A n f - 1 / ( ? A , ) Algorithm 2:
- P L T , J l - d l - A M - l / A J
there exists a unique root A # (here.
AM
>
Step 1. Rearrange the indices of ,4j’s such that A12
Step 2. Let t = 0 and
Z*
= 0.Step 3. (i) If
E,"=;'
wjm;(1-
p,,,,)2
z
-
z*,
it is impossible to reduce the number of still un- detected software faults t oZ
after the appli- cation of test instance t k .(ii) If
E;;'
v3mj+(l-
p,,,,)<
z
-Z*
5
,
(let- tinge#
=e)
there exists a unique root A# such that R M - ~ # ( X # ) =Z
-
Z* and the optimal solution &# is)
A M - ~ / 2.4
~ - P L T , ,
- j 1 -
otherwise, let qg-e+l - - y ~ - ' + l = 0 , set
go t o Step 3.
U
Z*
+ 2'+
vM-em;M-e, set i! +-e +
1, and In Algorithm 2 the firstt# -
1 iterations just dosimple numerical comparisons. In the t # t h iteration, since R M - [ # ( X ) is decreasing in A, there must exist a
unique root
A#
such that R M - e # ( X # ) =Z
-
Z*
and hence the optimal solution Q# can be obtained. Note thatA#
can be easily obtained by simple numerical analysis. Similar to the discussion in Subsection 3.1, Algorithm 2 is, therefore, also quite simple, efficient, and novel. Furthermore, by Lemma 2 it can be easi- ly shown that this algorithm always converges in, atworst, M - 1 steps. The value of the objective func- tion given by Eq.(25) with the optimal solution Q# is
4. Relationship between Optimal, Average,
and Proportional Allocation Methods
In Section 3.1, we discuss the problem of optimal resource allocation if the total amount of testing re- sources for module testing is specified. In this section, based on the concepts of average allocation and pro- portional allocation, we introduce two simple resource allocation methods, the average allocation method and the proportzonal allocation method, respectively. Fur- thermore, we also investigate the relationship between these three allocation methods.
A resource allocation method is called an average allocation method if the testing resources are allocat- ed to each module evenly. Let q j , a u g be the amount of testing resources allocated to module j during the ap- plication of t k by the average allocation method, and
then we have
Let Zavs be the number of still undetected faults in the whole system after the application of t k by the average allocation method, and then from Eq.(6) we have
A resource allocation method is called a proportion-
al allocation method if the amount of testing resources
allocated t o module j is proportional t o the number of still undetected faults in module j. Let qj,prop be the amount of testing resources allocated t o module j dur- ing the application of t k by the proportional allocation
method, and then we have Q j , p r o p
Note that if m; = mz =
. . .
= m t , the proportional allocation method is equivalent to the average alloca- tion method. Let Zprop be the number of still unde-tected faults in the whole system after the application of t k by the proportional allocation method, and then
from Eq.(6) we have
The optimal allocation method is said t o be bet-
ter than the average and the proportional methods
since Zopt
5
Z a u g and Zopt5
Z p r o p . However, weare also interested in how much better the optimal al- location method is. In the following, we investigate the value of Zopt/Zprop under the case pLT,j = pL, for
j = 1 , 2 ,
...,
M .From Eqs.(24) and (43), we have
z o p t
d P L T ) =
-
ZProP
(44)
T ha t is, Zopt/Zprop is decreasing in p,,, which mean-
s that the larger the p,, is, the smaller the ratio of
the number of still undetected faults by the optimal allocation method t o that by the proportional method
is. In other words, as p , , increases, the optimal al- location method is much better than the proportional allocation method. Furthermore, since p , , represents the skill of detecting faults [la], from Eq.(44) the fol- lowing can be observed: the better the skill of detect- ing faults, the better the optimal allocation method (compared with the proportional allocation method). By the same argument on Z o p t / Z p r o p , we have the
property that ZOPt/ZPrOP is decreasing in p , , . That is, the better the skill of detecting faults, the better the optimal allocation method (compared with the av- erage allocation method).
5. Numerical Examples
Consider a software system consisting of 5 mod- ules (i.e.,
A4
= 5). Suppose there are 4 test instancest l 1 t 2 , t 3 , t 4 (i.e., k = 5) applied during module test-
ing so far. For each module, the parameters a j , b j , m j , and p,,,, , j = 1 , 2 , . .
.
, 5 can be estimated by using the software failure data, and then the estimat- ed value of mj. can be obtained. The estimated val-ues of m;, a j , b j , p L T S j and the weighting factor vj are assumed and listed in Table 1. Consequently, the total number of still undetected faults after the ap- plication of t l r t 2 , t 3 , t 4 is assumed to be 200 (since
E,”,,
m; = 200).Example 1. Minimizing the total number of
undetected faults
Suppose the total amount of testing resources Q for module testing during the application of t s is 20k (i.e., 20,000) man-hours. The manager has t o allocate the
20k man-hours to the 5 modules to minimize the total
number of still undetected faults after the application of tj. Using the values of m;, a j , b j , P,,,~, and v j in
Table 1, the optimal solutions q: estimated by Algo- rithm l are shown in Table l. Consequently, the total number of still undetected software faults after the application of $ 5 estimated by Eq.(24) is Zopt = 115. Th a t is, the total number of still undetected faults is anticipated to be reduced from 200 to 115 by using the testing resources of 20k man-hours. T he reduction in the undetected software faults is about 42.5%.
Table 1. Allocated Testing Resources q,# for Minimizing undetected Software Faults.
( Q is assumed t o be 20k man-hours) Module m: a , b , a . - U , o* z , ~ ~~~ 1 50 0.02 0.1 1.0 1 12.79 3.6 2 45 0.08 0.2 0.6 1 5 . 1 7 19.2 3 40 0.2 1 0.3 1 1.76 28.3 4 35 0.8 5 0.03 1 0.28 34 5 30 1.0 10 0.003 1 0 30
Zopt =
E:=,
z3 = 115 (42.5% reduction)Based on the average allocation method, from E- = qz,aug =
. . .
= q S , a v g = 4 and q.(40) we havethen from Eq.(41) we have Zaug = 128. Furthermore] based on the proportional allocation method, from E- q.(42) we have q 1 , p r o p = 5 , q 2 , p r o p = 4.5, Q 3 , p r o p = 4, ~ 4= 3.5, , and ~~ 5 , p r o p ~ = 3. Therefore] from Eq.(43) ~ ~
we have Zprop = 125. Obviously, the optimal alloca- tion method is better than the proportional method and the average method. Furthermore, the optimal resource allocation method is very efficient in this ex- ample since the difference of Z p r o p
-
Zopt is significant.In the following, consider the case p,,,, = p , , for
j = 1 , 2 , .
. .
,
5 and the estimated values of mj.,
a j ,b j and vj are also listed in Table 1. The curves
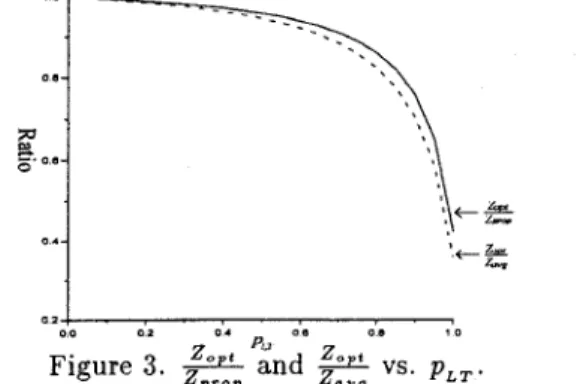
of Z o p t / Z p r o p and Z o p t / Z a v g vs. p , , are depict-
ed in Figure 3. As p , , = 0.1, from Figure 3 we
have Z o p t / Z p r o p = 0.995 and Zopt/Zaug = 0.993.
As p , , = 0.9, we have Z o p t l Z p r o p = 0.651 and Zopt/Zavg = 0.586. Obviously, if p , , is smaller, the differences of the number of still undetected software faults among these three resource allocation methods are less significant. Therefore, the average resource allocation method can be employed due to its simplic- ity if p , , is smaller. On the contrary, if p , , is larger, the optimal resource allocation method should be ap- plied since it reduces the number of still undetected software faults much more significantly. In summary, both curves in Figure 3 are decreasing in p , , ; that is, the larger the p , , , the better the optimal allocation method (compared with the average and the propor- tional allocation methods).
0 0 0 1 0 . 0 - o m ( 0
..
PU
Figure 3. and vs. p , , .
P‘OP Z . * g
Figure 3 also indicates that the proportional allo- cation method is better than the average allocation method since
Zopt/Zprop
2.
Zopt/Zavg for 0<
p , , 1. This result meets our intuition.Example 2. Minimizing the total amount of
testing resources
Suppose the number of still undetected software faults after the application of t s needs to be reduced from 200 t o 120. The manager has to determine how
much testing resource is to be allocated for each mod- ule t o minimize the total amount of testing resources. Using the values of m;
,
a j,
bj,
p , ,,
,
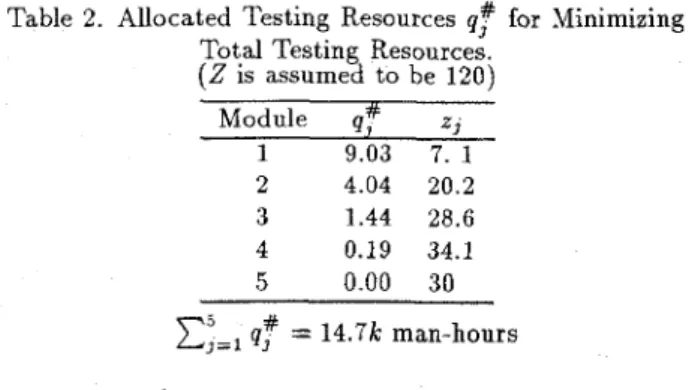
and v j in Table1, the optimal solutions qf estimated by Algorithm 2 are shown in Table 2. Consequently, the total amoun- t of testing resources in module testing estimated by Eq.(39) is 14.7k man-hours. That is, the amount of testing resources spent during the application of t 5 is anticipated t o be 14.7k man-hours.
Table 2 . Allocated Testing Resources q: for Minimizing Total Testing Resources.
( Z is assumed to be 120) Module q: 2 3 1 9.03 7. 1 2 4.04 20.2 3 1.44 28.6 4 0.19 34.1 5 0.00 30 q: = 14.7k man-hours 6. Conclusions
In this paper, based on the HGDM with logistic learning factor, we investigate two optimal resource allocation problems in software module testing: 1) minimization of the number of software faults still un- detected in the system after testing given the total amount of testing resources and 2) minimization of the total amount testing resources required given the number of software faults still undetected in the sys- tem after testing. Two efficient and novel optimization algorithms based on the concept of Lagrange multipli- er method for the above two problems are proposed, respectively. In addition, the relationship between the optimal, average, and proportional resource allocation methods is investigated. Experimental results show that the optimal allocation methods are very efficien- t for solving the testing resource allocation problem. Furthermore, the results show that the better the skill of detecting faults, the better the optimal allocation met hod.
Acknowledgment.
We would like t o expressour gratitude for the support of the National Science Council, Taiwan, R.O.C., under Grants NSC85-2221- E002-015. Reviewers’ comments are also highly ap- preciated.
References
[l] M. V. Zelkowitz, “Perspectives of software engi- neering,” ACM Computang Surveys, Vol. 10, pp.
[a]
P. Kubat and H . S. Koch, “Managing test- procedures to achieve reliable software,” IEEETrans. o n Relaabalzty, Vol. 32, No. 3, pp. 299-303,
1983.
[3] H . Ohtera and S. Yamada, “Optimal allocation & control problems for software-testing resources,” 197-216, 1978.
I E E E Trans. on Reliability, Vol. 39, No. 2, pp.
[4] Y. W. Leung, “Software reliability growth model
with debugging efforts,” Microelectron. Reliab.,
[5] J. D. Musa, A. Iannino, and K. Qkumoto, Soft-
ware Reliability
-
Measurement, Prediction, Ap-plication, McGraw-Hill, New York, 1987.
[6] M. Xie, Software Reliability Modeling, World Sci- entific Publishing Company, Singapore, 1991. [7] M. R. Lyu (ed.), Handbook of Software Reliability
Engineering, McGraw-Hill, New York, 1996.
[8] Y. Tohma, K. Tokunaga, S. Nagase, and Y. Mu- rata, “Structural approach to the estimation of the number of residual software faults based on the hyper-geometric distribution,” IEEE Trans.
on Software Engineering, vol. 15, No. 3, pp. 345-
355, March 1989.
[9] Y. Tohma, H. Yamano, M. Ohba, and R. Jaco- by, “The estimation of parameters of the hyper- geometric distribution and its application to the software reliability growth model,” IEEE Trans.
on Software Engineering, vol. SE-17, No. 5, pp.
483-489, May 1991.
[lo] R. Jacoby and Y. Tohma, “Parameter value computation by least square method and e- valuation of software availability and reliabili- ty at service-operation by the hyper-geometric distribution software reliability growth model (HGDM),” Proc. 13th Int. Conf. Software Engi-
neering, pp. 226-237, 1991.
[ l l ] T. Minohara and Y. Tohma, “Parameter esti- mation of hyper-geometric distribution software reliability growth model by genetic algorithms,”
Proc. 6th Int. Symposium on Software Reliability Engineering, pp. 324-329, 1995.
[12]
R.
H. Hou, S. Y. Kuo, and Y. P. Chang, “Ap- plying various learning curves to hyper-geometric distribution software reliability growth model,”Proc. 5th Int. Symposium on Software Reliability
Engineering, pp. 7-16, 1994.
[13] R. H. Hou, S. Y. Kuo, and Y. P. Chang, “ Opti-
mal release times for software systems with sched- uled delivery time based on the HGDM
,”
IEEETrans. on Computers (accepted for publication).
[14] R. H. Hou, S. Y. Kuo, and Y. P. Chang, “Op- timal release policy for hyper-geometric distri- bution software reliability growth model,” I E E E
Trans. on Reliability (accepted for publication).
[15] M. S. Bazaraa and C. M. Shetty, Nonlinear Pro- gramming: Theory and Algoriihms, Wiley, New
York, 1993.
[16] M . J . D. Powell, A tolerant algorithm for linear-
l y constrained optimization calculations, DAMTP
Report NA17, University of Cambridge, England, 1988.
171-176, 1990.