電腦控制系統中模式混淆之偵測
8
0
0
全文
(2) 太 空 與 醫 療 等 系 統,通 稱 為 安 全 關 鍵 性 計. 組 資 料 庫,來 預 測 操 作 員 內 心 認 為 的 系 統. 算. co mputing. 模式,並比較是否與系統目前的模式相. systems)。 安 全 關 鍵 性 軟 體 與 一 般 商 用 軟. 左,可 即 時 給 予 操 作 員 相 關 的 警 訊,進 而. 體最大的不同在於安全關鍵性軟體與大. 避 免 因 模 式 混 淆 所 造 成 的 重 大 意 外 事 件。. 系. 統. (safety. critical. 眾 的 生 命 安 全、財 產 有 密 切 的 關 係,當 軟. 第二章為相關的背景研究,第三章. 體 發 生 意 外 時,將 造 成 的 嚴 重 後 果。通 常. 說 明 我 們 的 方 法 論,在 第 四 章 我 們 以 鍋 爐. 此 類 型 的 系 統 多 數 為 複 合 式 系 統 (hybrid. 系 統 作 為 個 案 的 研 究 與 分 析,最 後 提 出 簡. syste m) 包 含 硬 體 、 自 動 化 電 腦 控 制 系 統. 單的結論。. 與操作人員三部份。. 2. 研究背景. 現行的自動化系統控制改變了傳統 人 為 控 制 的 角 色。人 機 界 面 的 不 良 設 計 可. 2.1 模式混淆( mo d e c o n f u s i o n ). 能引發操作員對硬體系統及自動化系統. 當操作員對系統現行的模式不清楚. 執 行 狀 態 的 誤 解,此 種 誤 解 稱 作 模 式 混 淆. 時 , 稱 為 模式混淆( m o d e c o n f u s i o n ) 。 操 作. ( mode confusion)[4][5][6][9] 。 模 式 混 淆. 員常因知識不足或對現狀錯誤的認知引. 是 造 成 航 空 事 故 的 主 因 之 一。例 如 飛 機 處. 發 系 統 的 意 外 。 Leveson[3][4][5][8] 將 安. 於 自 動 航 行 模 式 時,機 長 卻 認 為 飛 機 處 於. 全關鍵系統中設計缺失所造成的潛在模. 手 動 模 式,如 此 的 模 式 混 淆 極 有 可 能 造 成. 式混淆,分為六類,分述如下:. 飛 機 失 控 而 導 致 意 外。因 此 若 能 偵 測 及 消. . 界 面 解 讀 錯 誤 (Interface Interpretation. 除 潛 在 的 模 式 混 淆,將 可 大 幅 減 少 不 必 要. Errors): 系 統 對 使 用 者 輸 入 的 值 產 生. 的 人 為 損 害,提 高 安 全 關 鍵 性 軟 體 的 可 靠. 誤解並給予錯誤的輸出值,因而造成. 度 及 保 障 大 眾 的 生 命 安 全。故 本 研 究 發 展. 錯誤。. 了一套複合式系統人機介面模式混淆偵. . 不 一 致 行 為 (Inconsistent Behavior) :. 測 的 方 法。我 們 的 方 法 不 僅 能 夠 在 早 期 系. 當系統中存在不一致的行為,使得相. 統 開 發 階 段,偵 測 出 可 能 造 成 模 式 混 淆 的. 同的輸入卻造成不同的行為結果。. 設 計 , 亦 能 夠 在 執 行 階 段 (run time ) 即 時. . 偵測到模式混淆的發生。. 間 接 模 式 改 變 (Indirect. Mode. Changes) : 系 統 沒 有 收 到 操 作 員 明 確. 在設計階段,我們以狀態圖和條列. 的指令卻自動轉換模式時,則稱為間. 式 規 則 表 的 方 式,分 別 表 達 自 動 化 系 統 應. 接模式改變,通常這樣的模式轉換會. 有的動作以及操作員依據常識判斷而對. 造成意外事故的發生。. 系 統 做 出 的 反 應 動 作,藉 由 兩 者 的 比 對 找. . 非 預 期 的 副 作 用 (Unintended. Side. 出 操 作 員 對 系 統 不 熟 悉、易 出 錯 的 操 作 方. E f f e c t s ): 某 些 操 作 行 為 可 能 引 發 操 作. 式或是系統訊息可能表達不清楚的地. 員 未 知 的 額 外 效 應( 副 作 用 ), 意 外 因. 方,我 們 可 根 據 得 到 的 結 果 進 一 步 加 強 、. 而產生。. 改 善 系 統 人 機 界 面 的 設 計,以 達 到 降 低 模. . 式混淆發生的機率。. Feedback): 系 統 回 饋 的 資 訊 不 完 整 而. 在執行階段,我們在系統中加入模 式 混 淆 偵 測 模 組 (mode. 缺 少 合 適 回 饋 (Lack of Appropriate. 造成操作員對操作模式混淆,進而引 發錯誤。. confusion. detection module), 藉 由 擷 取 操 作 員 的 反. . 應動作與模組內儲存的模式混淆偵測模. 操 作 員 權 限 限 制 (Operator Authority L i m i t s ):內 鎖 ( i n t e r l o c k ) 等 系 統 保 護 動. 2.
(3) 作,讓操作員在緊急狀況下,無法得. 一種感應組合值只對應到一種系統模. 到適當權限。. 式,而 系 統 模 式 則 允 許 有 多 種 的 感 應 組 合. 現 行 模 式 偵 測 (mode detection) 的 方. 值 , 例 如「 高 水 位 、 高 壓 力 、 高 溫 度 」就. 法 不 多,更 是 未 見 能 自 動 化 的 偵 測 方 法 。. 是 一 組 感 應 組 合 值,將 各 種 組 合 歸 類 到 系. 本研究發展一套有系統的事前和執行階. 統 模 式 中。其 中 不 同 的 感 應 值 組 合 狀 態 會. 段 的 模 式 混 淆 偵 測 方 法,以 改 善 人 機 介 面. 有其對應的反應動作。. 設計的安全性。. 當建構好系統模式架構圖後,我們 以 條 列 式 規 則 表 (rule-based table)依 據 不. 3. 研究方法. 同的狀態和感應組合值來表示系統的反. 我們的方法包含事前設計階段的分. 應 動 作 以 及 操 作 員 的 反 應 動 作。在 規 則 表. 析 及 執 行 時 的 即 時 偵 測 兩 大 部 分,詳 述 如. 的 定 義 中,表 頭 的 資 料 表 示 系 統 的 主 要 模. 下。. 式( 狀 態 )和 感 應 值 組 合 , 接 著 列 出 系 統 反 應、硬 體 設 備 設 定 狀 態 及 所 對 應 的 操 作. 3.1 設計階段的模式混淆偵測方法. 員或自動化系統的反應動作,如表 1 所. 首先我們發展潛在模式混淆偵測的. 示。. 分 析 方 法。第 一 步 驟 我 們 將 系 統 以 視 覺 化. 表 1 條列式規則表. 的方式來建構,在此我們利用狀態圖 (statechart)建 構 整 體 系 統 的 模 式。接 著 根 據 狀 態 圖 中 的 各 種 模 式,我 們 依 據 模 式 內 不同的感應組合值制訂條列式規則表 (rule-based table), 分 別 表 達 自 動 化 系 統. 當自動化系統反應動作和操作員反. 應有的動作以及操作員依據常識判斷而. 應 動 作 以 表 格 的 方 式 呈 現 後,第 一,可 採. 對 系 統 做 出 的 反 應 動 作。藉 由 兩 者 的 比 對. 用人工的方式來比對相同的狀態條件下. 找 出 人 機 界 面 上 設 計 的 缺 失,以 便 加 強 人. 是 否 擁 有 相 同 的 操 作 動 作,以 找 出 潛 在 的. 機界面的互動性。. 模 式 混 淆,第 二,若 是 狀 態 條 件 很 多,則. 由 於 狀 態 圖 具 有 階 層 式 (hierarchical). 可 以 將 系 統 模 式、量 測 組 合 和 其 他 狀 況 以. 的 表 達 特 性,所 以 我 們 利 用 其 特 性 將 系 統. 代 碼 表 示,並 儲 存 於 資 料 庫 中,以 便 將 來. 分 成 兩 層 不 同 角 度 的 狀 態 圖,第 一 層 為 主 要 模 式 狀 態 圖 (Primary. mode. 用 於電腦 搜尋、 排列和 比對。 其中自 動. state. 化系統反應動作可從軟體規格和需求得. diagra m) , 第 二 層 為 感 應 值 組 合 狀 態 圖. 到。而 操 作 員 反 應 動 作 主 要 可 根 據 操 作 員. (Co mbination of se nsor state diagra ms)。. 對 於 系 統 的 常 識 (commo n se nse) 作 為 判. 第一層的主要模式狀態圖包含各種. 斷依據。. 正 常 和 異 常 的 狀 態 模 式,表 達 整 體 系 統 的 模 式。第 二 層 的 感 應 值 組 合 狀 態 圖 表 達 系. 3.2 執行階段的模式混淆偵測方法. 統 的 細 部 狀 態。我 們 將 系 統 每 一 種 感 應 器. 在 人 機 介 面 模 式 混 淆 的 議 題 中,除 了. 的 (sensor)量 測 數 值 劃 分 成 數 個 區 段 , 例. 事 前 找 出 可 能 發 生 的 問 題 以 外,如 何 在 執. 如 將 量 測 水 位 區 分 成 高 中 低 三 種 水 位,並. 行階段也能夠預測或是偵測可能的問題. 依照不同感應器的量測區段來進行組. 也 是 一 項 相 當 重 要 的 課 題。所 以 我 們 在 系. 合,這 樣 的 組 合 表 示 系 統 目 前 的 狀 況。每 3.
(4) 統 中 加 入 模 式 混 淆 偵 測 模 組 (mode. 模 式,所 以 我 們 必 須 進 一 步 分 析 系 統 的 狀. confusion detection module) 來 幫 助 系 統. 況 條 件,來 判 斷 出 系 統 的 改 變 是 在 哪 一 狀. 和 操 作 員 之 間 的 運 作,圖 1 為 我 們 所 提 出. 態 模 式 中。故 我 們 希 望 模 式 混 淆 偵 測 模 組. 的系統架構圖。. 能夠由操作員動作來推論操作員的內心 模式。我們的步驟如下: 1.. 比對已建立的模式混淆偵測模組資 料 庫,一 旦 發 現 模 式 混 淆,則 以 訊 息 回 應 操 作 員 , 否 則 繼 續 步 驟 2~4。. 2.. 把 所 有 的 硬 體 動 作 組 合 全 部 列 出,假 設 系 統 中 有 四 個 硬 體 設 備,每 種 硬 體 設 備 有 三 種 不 同 的 操 作,則 系 統 共 會 有 81 種 的 動 作 組 合 。. 3.. 每 種 動 作 組 合 必 定 對 應 一 種 目 的。例 如打開給水閥是為了使鍋爐水位上 升,而 這 樣 的 目 的 必 定 對 應 一 個 以 上. 圖 1. 系 統 架 構 圖. 的 系 統 狀 態 模 式。舉 例 而 言,在 正 常 模 式 可 以 加 水,在 低 水 位 模 式 也 可 以. 圖 1 中系統的硬體可以藉由電腦自. 加 水,所 以,不 同 的 動 作 組 合 將 可 對. 動 化 或 操 作 員 來 控 制,由 於 系 統 動 作 的 執. 應 到 系 統 不 同 的 模 式,因 此 我 們 可 以. 行 會 使 得 系 統 狀 態 改 變 並 回 饋 給 電 腦,電. 條 列 出 動 作 組 合 與 對 應 的 系 統 模 式。. 腦 再 將 訊 息 顯 示 給 操 作 員,根 據 不 同 的 訊 4.. 息,操 作 員 便 可 以 判 斷 下 一 操 作 步 驟。在. 最 後 分 析 感 應 器 得 到 的 訊 息 值,便 可 以 推 論 出 操 作 員 所 認 為 的 模 式,若 是. 圖中因此我們將模式混淆偵測模組加入. 推論出來的模式與系統的現行模式. 在 電 腦 和 操 作 員 之 間,一 方 面 收 集 系 統 目. 有所差異,則產生警示。. 前 的 狀 況,另 一 方 面 擷 取 操 作 員 控 制 系 統 的 指 令,其 中 在 模 組 內 部 的 比 對 方 式 是 藉. 4. 實作案例. 由 擷 取 操 作 員 的 指 令 動 作,來 推 論 操 作 員. 本 章 中 我 們 將 以 鍋 爐 (steam boiler). 認 為 系 統 目 前 的 模 式,並 加 以 比 對 系 統 目. 的案例來說明我們的方法。. 前 的 狀 況 和 模 式,若 是 推 論 的 模 式 和 系 統 目 前 的 模 式 並 不 一 致,則 可 能 是 產 生 了 模. 4.1 案 例 :蒸 氣 鍋 爐 系 統. 式 混 淆,此 時 必 須 即 時 給 予 操 作 員 適 當 警. 4.1.1 系 統 描 述. 訊,避免模式混淆的情況發生。. 針 對 鍋 爐 系 統 硬 體 和 環 境 (Physical enviro nme nt)描 述 [1][2]:. 由 操 作 員 動 作 推 論 操 作 員 的 認 知,可. A . 鍋 爐 ( s t e a m - b o i l e r ):鍋 爐 內 定 義 四 個 水. 能 產 生 多 種 推 論 結 果。舉 例 來 說,操 作 員. 位 , 包 含 最 高 水 位 (M2) 、 最 低 水 位. 可 以 在 正 常 水 位 時,希 望 水 位 上 升,也 可. ( M 1 )、最 大 正 常 水 位 ( N 2 ) 與 最 小 正 常 水. 以 在 低 水 位 時,希 望 水 位 上 升,因 此 水 位. 位 ( N 1 ) 限 制, 當 鍋 爐 正 常 運 作 時, 水 位. 上 升 是 我 們 希 望 系 統 完 成 的 動 作,而 正 常. 應處於最大正常與最小正常水位之. 水位和低水位卻是系統兩種不同的狀態. 間,若是水位高於最高水位或是低於 4.
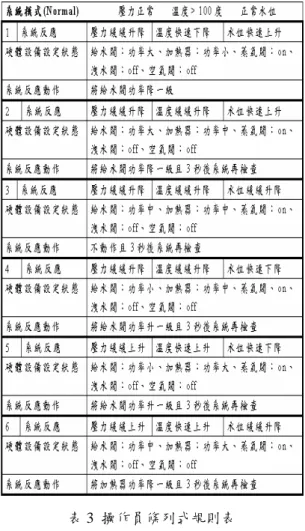
(5) 最 低 水 位 時,將 會 造 成 意 外 事 故 發 生 。. 急模式。. B. 給 水 閥 (pump): 提 供 鍋 爐 進 水 控 制 。 C. 洩 水 閥 (valve): 提 供 鍋 爐 出 水 控 制 。 D. 加 熱 器 (heater): 提 供 鍋 爐 爐 水 加 熱 。 E. 空 氣 閥 : 調 節 鍋 爐 內 壓 力 。 F. 蒸 氣 閥 : 蒸 氣 出 口 。 G. 感 應 器 (sensor): . 水 位 感 應 器 ( wa t e r - l e v e l s e n s o r, W): 量 測 鍋 爐 內 水 位 。. . 溫 度 感 應 器 (temperature. s e n s o r,. T): 量 測 鍋 爐 水 溫 度 。 . 壓 力 感 應 器 ( p r e s s u r e s e n s o r, P ) : 量 測鍋爐內壓力,鍋爐內可承受的最 大 壓 力 為 P1, 最 大 正 常 承 受 壓 力 為. 圖 2: 主 要 模 式 狀 態 圖. P2。. 根據系統中的感應器建立第二層的 感 應 值 組 合 狀 態 圖 (Combination. 4 . 1 . 2 設計階段的模式混淆偵測. sensor state diagrams), 依 照 系 統 三 種 不. 第一步驟先建構系統主要模式狀態圖. 同感應器所量測出來的不同條件狀態來. (Primar y mode sta te diagra m), 其 中 鍋 爐. 組 合 鍋 爐 的 狀 況,在 此 我 們 以 系 統 模 式 為. 系 統 包 含 七 個 主 要 模 式 ( m o d e ),如 圖 2 所. 正 常 模 式 下 的 “ 壓 力 正 常 、 溫 度 >100 度. 示,分別為: . 與正常水位”為探討的案例。. 測 試 模 式 ( t e s t m o d e ):測 試 鍋 爐 內 的 硬. 我 們 對 系 統 模 式 為 正 常 模 式,而 感 應. 體是否正常。 . 組 合 為 “壓 力 正 常 、 溫 度 > 1 0 0 度 與 正 常 水. 啟 動 鍋 爐 模 式 (start boiler mode): 將. 位 ”的 狀 態 下 , 由 系 統 的 需 求 規 格 分 析 出. 鍋爐注水到一定量,並加熱直到產生. 對 應 的 條 列 式 規 則 表 (rule-based table)來. 蒸氣。 . 表達自動化系統的操作方式,如表 2 所. 正 常 模 式 (normal mode ): 水 位 和 壓 力. 示 。 例 如 當 系 統 的 反 應 是 “壓 力 逐 漸 上. 皆處於正常範圍的標準操作模式。 . 升 、 溫 度 快 速 下 降 、 水 位 快 速 上 升 ”且 硬. 減 水 模 式 (reduce mode) : 當 水 位 低 於. 體 的 狀 態 為 “給 水 閥 : 功 率 大 、 加 熱 器 :. 最 小 正 常 水 位 (N1)時 , 則 必 須 加 水 。 . 功 率 小 、 蒸 氣 閥 : on 、 洩 水 閥 : off 、 空. 提 升 模 式 ( e n h a n c e m o d e ):當 水 位 高 於. 氣 閥 : o f f ”時 , 此 時 自 動 化 系 統 的 反 應 動. 最 大 正 常 水 位 (N2)時 , 則 必 須 釋 放 鍋. 作 則 為 “給 水 閥 功 率 降 一 級 ” 。接 下 來,我. 爐內的水。 . 們利用操作員的常識來分析操作員的模. 超 壓 模 式 (over-pressur e mode) : 當 壓. 式,如表 3 為操作員對應的條列式規則. 力 超 過 設 定 的 最 大 正 常 承 受 壓 力 (P1). 表。. 時,則必須釋放壓力。 . 危 急 模 式 (emerge nc y mode):. of. 當水. 位超過最高水位、低於最低水位或是 壓力高於最大承受壓力時,則進入危 5.
(6) 表2 自動化系統條列式規則表. 比較自 動 化 系 統 的 條 列 式 規 則 表 ( 表 2) 與操作員的條列式規則表(表 3),我們可以得知自 動化系統反應與操作員反應有所出入,其中第 一 個混淆地帶為操作員在每一種操作動作 後,必 須 要 有 3 秒 鐘 的 等 待 回 應 時 間,但 是表 3 的操作員反應動作中完全疏忽 了。第 二 個 是 系 統 在 正 常 模 式 中,溫 度 和 水 位 同 時 有 問 題 時,則 必 須 以 溫 度 為 優 先 來 考 慮,在 表 3 編 號 5 中,卻 只 考 慮 到 水 位。另 外 第 三 個 是 為 了 防 止 快 速 熱 漲 冷 縮 對 鍋 爐 產 生 的 不 良 影 響,所 以 當 溫 度 快 速 上 升 時,操 作 員 必 須 有 相 對 應 的 動 作,但 是 表 3 中 的 編 號 6, 操 作 員 並 沒 有 任 何 的 反 應 動 作 ; 因 此 藉 由 條 列 式 規 則 表 (rule-based table)的 方 式 , 在 設 計 階 段 便 可 發 現 模 式 混 淆 的 地 方,如 此 一 來 便 可 進 一 步 地 改 善 設 計 上 的 缺 失,加 強 人 機 界 面 設計的明確性。. 4.1.4 執行階段的模式混淆偵測 表 3 操作員條列式規則表. 在執行階段的偵測,首先我們在系統中加入 模 式 混 淆 偵 測 模 組 (mode. confusion. detection module)。 藉 由 擷 取 操 作 員 的 指 令 動 作,來 推 論 操 作 員 認 為 系 統 目 前 的 模 式,在 模 組 中 我 們 以 硬 體 動 作 對 應 系 統 模 式資料庫為主要的推論依據,如表 4 所 示。 表 4 模式混淆偵測模組資料庫. 6.
(7) 每一種硬體設備的動作都會對應到. 系 統 人 機 介 面 模 式 混 淆 偵 測 的 方 法,利 用. 一 種 到 兩 種 模 式。對 應 兩 種 模 式 的 動 作 例. 狀 態 圖 與 條 列 式 規 則 表 的 方 式,不 僅 能 夠. 子 如 操 作 員 的 動 作 為 “洩 水 閥 為 關 、 給 水. 在 早 期 系 統 開 發 階 段,偵 測 系 統 中 潛 在 的. 閥 轉 至 大 且 加 熱 器 功 率 為 小 ”時 , 則 在 模. 模 式 混 淆 設 計,加 強 並 改 善 系 統 人 機 界 面. 組 中 可 能 對 應 的 是 提 升 模 式 (Enhance. 設 計 上 的 缺 失;亦 能 夠 在 執 行 階 段 即 時 偵. mode)和 超 壓 模 式 (Over-pressure mode),. 測 模 式 混 淆 的 發 生,盡 早 通 知 操 作 人 員 相. 接下來此模組便根據判斷感應器所測量. 關 的 警 訊,以 降 低 模 式 混 淆 發 生 的 機 率 ,. 的數值來推論,若是壓力處於正常狀況. 避 免 因 模 式 混 淆 所 造 成 的 重 大 危 害 事 件。. 下,則 推 論 為 提 升 模 式,反 之 則 推 論 為 超. 6. 參考文獻. 壓模式。 鍋 爐 系 統 的 模 擬,如 圖 3 所 示。我 們. [1] 江坤達, “ 電腦控制系統中模式混淆偵測之發展. 利 用 此 模 擬 系 統 [1], 模 擬 模 式 混 淆 的 偵. 與應用” ,元智大學資訊工程研究所,碩士論文,. 測。模 式 混 淆 可 能 因 操 作 員 的 疏 忽,也 可. 2004, 六月。. 能 是 硬 體 的 問 題,更 可 能 是 操 作 員 的 訓 練. [2] Jean- Raymond Abrial, “ Steam-boiler control. 不 足。因 此 此 模 擬 系 統 不 僅 能 夠 即 時 偵 測. specification problem,”August 10, 1994. [3] E. Bachelder et al. “ Describing and Probing. 模 式 的 混 淆,也 能 夠 訓 練 操 作 員 正 確 的 操 作 反 應,提 高 操 作 員 對 於 系 統 內 部 運 作 的. Complex. 認知。. Approach,”In the proceedings of the Aviation. System. Behavior:. A. Graphical. Safety Conference, Seattle, Sept. 2001. [4] R.W. B ut ler, S.P. M il l er, J . N. P o tt s, V. A. Car r eno,“A For malMet hodsAppr oach t ot he Anal ys i s of Mode Conf us i on, ” P r o c. o f 1 7 t h Di g it al Avio n ic s S ys t e ms co n f er e nc e,. Vo l. 1 , p p .C4 1 /1 - C4 1 /8 ,. 1998. [5]. N.. Leves on et al . “Anal yzi ng. G.. So ft war e. Sp eci f ic at io n s. fo r. Mo d e. Conf us i on Pot ent i al , ” Pr oceedi ngs of th e Wo r k s ho p o n H u ma n Er r o r a nd S ys te m De v elo p me n t, Gla sco w, M ar c h 1997. [ 6 ] N. G. Leveson and E. Palmer. “ Designing Automation to Reduce Operator Errors,”I nt h e. 圖 3 鍋爐系統模擬. Proceedings of Systems, Man, and Cybernetics. 5. 結論. Conference, Oct. 1997. 複合式系統的人機介面可能隱藏潛. [7]. D.. Ma c ke nz ie. “Co mp ut er-r ela ted. 在 模 式 混 淆 的 地 方,除 了 操 作 員 誤 解 資 訊. accid e nt al. 的 涵 意 外,缺 乏 即 時 的 回 應 訊 息 一 樣 會 導. exp lo r a tio n, ”S c ien c e a n d Pu b li c Po l ic y ,. 致 人 為 操 作 錯 誤。本 研 究 提 出 一 套 複 合 式. vo l 2 1 No ( 4 ) , p p .2 3 3 -2 4 8 , 1 9 9 4 . 7. d e at h :. an. e mp ir ica l.
(8) [ 8 ] J . R us hb y, J . Cr o w, E. Pal mer , “An Au to ma ted Me t ho d to Det ect P o te n tia l Mode Conf us i ons , ” P r o c.. of. 17th. Di g ita l Av io nic s S ys te ms co n f er e nc e, vo l 1 /1 7 , p p . 4 .B .2 -1 -4 . B .2 -6 , 1 9 9 9 . [ 9 ] Mario Rodriguez et al. “ Identifying Mode Confusion Potential in Software Design,”Digital Aviation Systems Conference, October 2000.. 8.
(9)
數據
相關文件
資訊三乙 楊皓羽 國立臺北科技大學 光電工程系 資訊三乙 葉宜修 國立臺灣科技大學 資訊工程系 資訊三乙 廖蒼藝 國立雲林科技大學 資訊管理系 資訊三乙 劉翊誠 致理科技大學
Department of Computer and Communication Kun San University.. Tainan , Taiwan
電子 、 機械系 、 環工系 、 高分子、光電、電腦與通訊 本學程共計 7 學科, 18 學分,必須修畢全部學分,始
數位計算機可用作回授控制系統中的補償器或控制
Feng-Jui Hsieh (Department of Mathematics, National Taiwan Normal University) Hak-Ping Tam (Graduate Institute of Science Education,. National Taiwan
Department of Computer Science and Information
Department of Computer Science and Information
Department of Computer Science and Information
