國立交通大學機械工程學系
碩士論文
微型模穴填充過程之輸送現象研究
Study on Transport Processes of Micro Injection Mold-filling using MEMS Fabricated Silicon Mold
研
究 生:潘柏霖
指導教授:林振德
微型模穴內填充過程之輸送現象研究
研究生:潘柏霖 指導教授:林振德摘要
本論文之目的在於設計不同模穴尺寸及流動條件,利用光學方式 觀測水與不同黏度等級之黏度液流經微小模穴時流體前緣移動過 程,以探討毛細力、黏滯力、慣性力以及幾何效應對波前流動的影響; 論文中並配合CFD-ACE(U) Modules 軟體模擬分析,在分析中加入表 面張力的效應模擬流體填充過程的運動方式,經由理論與實驗分析的 比較進一步歸納出會影響流動現象之主要參數。 由模擬結果得知,當波前脫離入口中央高壓區域的影響後,毛細 作用力便抵銷慣性力而開始主導波前,當流率越大,中央高壓影響的 區域越長,而在進入漸闊區時,截面積擴張進而造成毛細阻力變大, 使得波前由凹形變為凸形;因而從模擬當中我們歸納出影響波前的三 個主要參數,即流率、接觸角值與幾何尺寸的變化。 在實驗方面,影響波前流動最大因素仍在於液體與壁面之接觸性 質,從水與黏度液的實驗結果比較可看出,附著力越強,其毛細作用也就越顯著;在幾何尺寸方面,我們可藉由減縮水力直徑來提升毛細 力作用程度,而當水力直徑相同情況下,深寬比不同所造成的流動情 形也會有所差異;另外一個因素我們發現也必須考量進去,那就是壁 面粗糙度對流動中液體會產生自由能障礙(Free energy barriers),當液 體與兩側粗糙面接觸的周長比例越高,其影響就越顯著;而在黏滯力 的部分,我們所選用的黏度液在流動過程中,波前與壁面接觸點之前 端會產生預先潤濕層(precursor film),然而此現象的確使得毛細作用 更為顯著,由幾何尺寸與流率的改變都難以影響液體與壁面接觸關 係。
Study on Transport Processes of Micro Injection
Mold-filling using MEMS Fabricated Silicon Mold
Student : Po-Lin Pan Advisor : Prof. Jenn-Der Lin
Abstract
This research project purposes to investigate the transport processes during the micro injection mold-filling. MEMS fabricated injection molding is performed with various geometrical parameters of cavities. A microscope associated with a high-speed CCD camera is utilized for observing the advanced front and the mold-filling processes as well. The effects of various physical properties of fluids are studied and the competition of the capillary force, viscous force, inertia force and geometric parameters be examined. In addition to the experimentals, CFD-ACE(U) Modules Software for simulating analysis on the transport processes is also performed. Experimental results show that the apparent dynamic contact angle and the curvature of meniscus front indeed affected by adhesive force, suface tension and volume flow rate. On the part of various geometrical parameters, we can increase capillary force effect by reducing hydraulic diameter. In the same hydraulic diameter and weber number condition, meniscus flow phenomena will be affected by the aspect ratio. Besides, we must consider roughness effect when wall surface is not smooth and aspect ratio is small. As the various viscosity , the precursor film may show up ahead of the nominal contact line. The effect of precursor film results in gradients of the surface tension. It is difficult to affect apparent dynamic contact angle by even change in geometrical parameters and volume flow rate. In numerical compution, we solve conservation and momentum equation model for the filling processes calculation in co-operation with volume-of-fluid (VOF) interface tracking methodology and continuum surface force (CFS) model. The simulation results show that volume flow rate ,contact angle and cross-section area expansion are dominant factors of the meniscus shape.
致謝
本論文係承恩師 林振德教授悉心指導下始得完成,謹致至深 之謝忱。同時感謝論文口試委員吳志陽、陳志臣、傅武雄等教授及許 隆結學長對本文所提之寶貴意見,使之更臻完善。 另外,感謝半導體實驗室、自強基金會及玻璃工廠等諸位技術員 及師傅的幫助,使所製作的微流體裝置能得以快速完成,且在製程上 亦獲得相當多之寶貴經驗。 我非常珍惜在交大的每一天,感謝學長文福、文忠、耀鋒、志銘、 正華、彥翔對於我的照顧,還有永賢、勤暐、凱倫、盈立、家棟、家 宏等同窗好友們在衝刺時的互相打氣,以及學弟自皓、本權、昱宏、 俞任你們的陪伴與鼓勵,本人亦將銘記在心。 感謝家人及親朋好友的支持與鼓勵,讓我能無後顧之憂地專心於 學業;最後,僅以本論文獻給所有關心我的人。目錄
中文摘要...i 英文摘要... iii 致謝...v 目錄...v 圖目錄...vii 表目錄...xvii 符號表...xviii 第一章 緒論 ...1 1.1 前言...1 1.2 研究背景 ...2 1.3 研究目的 ...5 第二章 實驗設計與方法 ...6 2.1 微流道設計 ...6 2.2 微流道製程 ...9 2.3 觀測系統 ...11 2.4 實驗項目與觀測步驟 ...13 第三章 理論模式及數值方法簡介 ...16第四章 結果與討論 ...19
第五章 結論 ...34
參考文獻...36
表………..39
圖目錄
圖2-1 表面張力之示意圖……… 43 圖2-2 液體與固體表面濕潤性之示意圖……….43 圖2-3 微型模穴之外形……….44 圖2-4 微流體裝置之製程……….45 圖2-5 超音波震動鑽孔機……….46 圖2-6 微流體裝置背面,輸水管與入口區黏合……….46 圖2-7 實驗系統之示意圖……….47 圖2-8 可程式注射幫浦……….48 圖2-9 高速攝影機及控制器……….48 圖2-10 接觸角儀器……….49 圖2-11 滴定示意圖……….49 圖2-12 接觸角軟體操作步驟.………50 圖2-13 表面張力計………….………51 圖3-1 單一線界面計算(SLIC)及片段線性界面計算(PLIC)界面建構 方式示意圖………….………51 1 2 圖4-1 w=100μm、d=80μm、 =10.007、 =1.1111、Q=0.456 ml/min 水在波前觀測區之波前流動現象………….…………52 We We1 2 1 2 1 2 1 2 1 2 1 2 1 2 1 2 1 2 圖4-2 w=400μm、d=80μm、 =10.007、We =0.1042、Q=0.456 ml/min 水在波前觀測區之波前流動現象………….…………53 We 圖4-3 w=800μm、d=80μm、 =10.007、We =0.0284、Q=0.456 ml/min 水在波前觀測區之波前流動現象………….…………54 We 圖4-4 w=400μm、d=80μm、 =10.007、We =0.1042、Q=0.456 ml/min 水在漸闊(縮)區之波前變化比較………….………….55 We 圖4-5 w=800μm、d=80μm、 =10.007、We =0.0284、Q=0.456 ml/min 水在漸闊(縮)區之波前變化比較………….………….56 We 圖4-6 w=100μm、d=40μm、We =10.026、We =0.857、Q=0.25 ml/min 水在波前觀測區之波前流動現象………….………57 圖4-7 w=400μm、d=40μm、We =10.026、We =0.0682、Q=0.25 ml/min 水在波前觀測區之波前流動現象………….………58 圖4-8 w=800μm、d=40μm、We =10.026、We =0.0178、Q=0.25 ml/min 水在波前觀測區之波前流動現象………….………59 圖4-9 w=400μm、d=40μm、We =10.026、We =0.0682、Q=0.25 ml/min 水在漸闊(縮)區之波前變化比較………….……….60 圖4-10 w=800μm、d=40μm、We =10.026、We =0.0178、Q=0.25 ml/min
水在漸闊(縮)區之波前變化比較………….……….61 1 2 1 2 1 2 1 2 1 2 1 2 圖4-11 w=73.73μm、d=73.73μm、We =0.4、We =0.0682、
aspect ratio=1、Q=0.085 ml/min、水在波前觀測區之波前流動 現象………….………62
圖4-12 w=66.7μm、d=80μm、We =0.333、We =0.0682、
aspect ratio=0.835、Q=0.083 ml/min 水在波前觀測區之之波前 流動現象………….………62
圖4-13 w=52.2μm、d=120μm、We =0.219、We =0.0682、
aspect ratio=0.435、Q=0.098 ml/min 水在波前觀測區之波前流 動現象………….………63
圖4-14 w=45.6μm、d=180μm、We =0.175、We =0.0682、
aspect ratio=0.253、Q=0.128 ml/min 水在波前觀測區之波前流 動現象……….………63
圖4-15 w=800μm、d=38μm、We =39.3、We =0.0682、
aspect ratio=21、Q=0.474 ml/min 水在波前觀測區之波前流動 現象……….………64
圖4-16 w=1600μm、d=37.3μm、We =156.146、We =0.0682、
現象……….………65 1 2 1 2 1 2 2 2 2 圖4-17 w=800μm、d=38μm、We =10.06、We =0.0173、Q=0.24 ml/min 水在波前觀測區之波前流動現象………….………66 圖4-18 w=800μm、d=38μm、We =1.009、We =0.00173、Q=0.076 ml/min 水在波前觀測區之波前流動現象………….…………67 圖4-19 w=800μm、d=37.3μm、We =1.0133、We =0.0004375、Q=0.075 ml/min 水在波前觀測區之波前流動現象………….………...68 圖4-20 w=180μm、d=45μm、We =0.095、aspect ratio=4、 Q=0.15 ml/min 水在加長之波前觀測區於不同位置拍攝的波 前現象………….……….…………...69 圖4-21 w=180μm、d=45μm、We =0.0682、aspect ratio=4、 Q=0.127 ml/min 水在加長之波前觀測區於不同位置拍攝的波 前現象………….………..………..70 圖4-22 w=180μm、d=45μm、We =0.04225、aspect ratio=4、 Q=0.1 ml/min 水在加長之波前觀測區於不同位置拍攝的波前 現象………….………..………..71 圖4-23 w=180μm、d=45μm、aspect ratio=4 水在不同流率下,動 態接觸角於不同位置下之變化關係圖………72
2 2 2 1 2 1 2 圖4-24 w=45μm、d=180μm、We =0.095、aspect ratio=0.25、 Q=0.15 ml/min 水在加長之波前觀測區於不同位置拍攝的波 前現象………….………72 圖4-25 w=45μm、d=180μm、We =0.0682、aspect ratio=0.25、 Q=0.127 ml/min 水在加長之波前觀測區於不同位置拍攝的波 前現象………….………73 圖4-26 w=45μm、d=180μm、We =0.04225、aspect ratio=0.25、 Q=0.1 ml/min 水在加長之波前觀測區於不同位置拍攝的波前 現象………….………73 圖4-27 w=45μm、d=180μm、aspect ratio=0.25 水在不同流率下, 動態接觸角於不同位置下之變化關係圖……….………74 圖4-28 Q=0.15 ml/min 水在深寬比 4 與 0.25 下之比較關係圖………74 圖4-29 Q=0.127 ml/min 水在深寬比 4 與 0.25 下之比較關係圖…….75 圖4-30 Q=0.1 ml/min 水在深寬比 4 與 0.25 下之比較關係圖……….75 圖4-31 w=100μm、d=80μm、We =10.007、We =1.1104、Q=0.317 ml/min S-3 黏度液在波前觀測區之波前流動現象…..………76 圖4-32 w=400μm、d=80μm、We =10.007、We =0.1041、Q=0.317 ml/min S-3 黏度液在波前觀測區之波前流動現象…………..77
1 2 1 2 1 2 1 2 1 2 1 2 1 2 1 2 1 2 圖4-33 w=800μm、d=80μm、We =10.007、We =0.0284、Q=0.317 ml/min S-3 黏度液在波前觀測區之波前流動現象…………..78 圖4-34 w=100μm、d=40μm、We =10.049、We =0.857、Q=0.174 ml/min S-3 黏度液在波前觀測區之波前流動現象……..…….………79 圖4-35 w=400μm、d=40μm、We =10.049、We =0.0682、Q=0.174 ml/min S-3 黏度液在波前觀測區之波前流動現象……..……80 圖4-36 w=800μm、d=40μm、We =10.049、We =0.0178、Q=0.174 ml/min S-3 黏度液在波前觀測區之波前流動現象……..……81 圖4-37 w=100μm、d=80μm、We =10.035、We =1.1104、Q=0.328 ml/min N-35 黏度液在波前觀測區之波前流動現象…..…….82 圖4-38 w=400μm、d=80μm、We =10.035、We =0.1041、Q=0. 328 ml/min N-35 黏度液在波前觀測區之波前流動現象………...83 圖4-39 w=800μm、d=80μm、We =10.035、We =0.0284、Q=0.328 ml/min N-35 黏度液在波前觀測區之波前流動現象………...84 圖4-40 w=100μm、d=40μm、We =10.074、We =0.857、Q=0.18 ml/min N-35 黏度液在波前觀測區之波前流動現象………85 圖4-41 w=400μm、d=40μm、We =10.074、We =0.0682、Q=0.18 ml/min N-35 黏度液在波前觀測區之波前流動現象…………...…….86
1 2 1 2 1 2 1 2 1 2 1 2 1 2 1 2 1 2 圖4-42 w=800μm、d=40μm、We =10.074、We =0.0178、Q=0.18 ml/min N-35 黏度液在波前觀測區之波前流動現象………87 圖4-43 w=100μm、d=80μm、We =10.023、We =1.1104、Q=0.330 ml/min S-60 黏度液在波前觀測區之波前流動現象…………88 圖4-44 w=400μm、d=80μm、We =10.023、We =0.1041、Q=0. 330 ml/min S-60 黏度液在波前觀測區之波前流動現象…………89 圖4-45 w=800μm、d=80μm、We =10.023、We =0.0284、Q=0.330 ml/min S-60 黏度液在波前觀測區之波前流動現象…………90 圖4-46 w=100μm、d=40μm、We =10.051、We =0.857、Q=0.181 ml/min S-60 黏度液在波前觀測區之波前流動現象………91 圖4-47 w=400μm、d=40μm、We =10.051、We =0.0682、Q=0.181 ml/min S-60 黏度液在波前觀測區之波前流動現象…………92 圖4-48 w=800μm、d=40μm、We =10.051、We =0.0178、Q=0.181 ml/min S-60 黏度液在波前觀測區之波前流動現象…………93 圖4-49 w=400μm、d=80μm、We =10.007、We =0.1041、Q=0.317 ml/min S-3 黏度液在漸闊(縮)區之波前變化比較…………...94 圖4-50 w=800μm、d=80μm、We =10.007、We =0.0284、Q=0.317 ml/min S-3 黏度液在漸闊(縮)區之波前變化比較....…...……95
1 2 1 2 1 2 1 2 1 2 1 2 1 2 1 2 1 2 圖4-51 w=400μm、d=40μm、We =10.049、We =0.0682、Q=0.174 ml/min S-3 黏度液在漸闊(縮)區之波前變化比較…………...96 圖4-52 w=800μm、d=40μm、We =10.049、We =0.0178、Q=0.174 ml/min S-3 黏度液在漸闊(縮)區之波前變化比較…………...97 圖4-53 w=400μm、d=80μm、We =10.035、We =0.1041、Q=0.328 ml/min N-35 黏度液在漸闊(縮)區之波前變化比較…….……98 圖4-54 w=800μm、d=80μm、We =10.035、We =0.0284、Q=0.328 ml/min N-35 黏度液在漸闊(縮)區之波前變化比較…….……99 圖4-55 w=400μm、d=40μm、We =10.074、We =0.0682、Q=0.18 ml/min N-35 黏度液在漸闊(縮)區之波前變化比較……….………..100 圖4-56 w=800μm、d=40μm、We =10.074、We =0.0178、Q=0.18 ml/min N-35 黏度液在漸闊(縮)區之波前變化比較………..….……101 圖4-57 w=400μm、d=80μm、We =10.023、We =0.1041、Q=0.330 ml/min S-60 黏度液在漸闊(縮)區之波前變化比較……...…102 圖4-58 w=800μm、d=80μm、We =10.023、We =0.0284、Q=0.330 ml/min S-60 黏度液在漸闊(縮)區之波前變化比較……...…103 圖4-59 w=400μm、d=40μm、We =10.051、We =0.0682、Q=0.181 ml/min S-60 黏度液在漸闊(縮)區之波前變化比較……...…104
1 2 1 2 1 2 1 2 1 2 1 2 1 2 1 2 1 2 圖4-60 w=800μm、d=40μm、We =10.051、We =0.0178、Q=0.181 ml/min S-60 黏度液在漸闊(縮)區之波前變化比較...………105 圖4-61 w=400μm、d=40μm、We =10.026、We =0.0682、V=5.2 m/s、 Q=0.25 ml/min 模擬水在波前觀測區之波前流動變化…….106 圖4-62 w=400μm、d=40μm、We =10.026、We =0.0682、V=5.2 m/s、 Q=0.25 ml/min 模擬水在漸闊區之波前變化...………107 圖4-63 w=400μm、d=40μm、We =10.026、We =0.0682、V=5.2 m/s、 Q=0.25 ml/min 模擬水的壓力分佈圖..……...………108 圖4-64 w=400μm、d=40μm、We =1.47、We =0.01、V=2 m/s、 Q=0.096 ml/min 模擬水在波前觀測區之波前流動變化……109 圖4-65 w=400μm、d=40μm、We =1.47、We =0.01、V=2 m/s、 Q=0.096 ml/min 模擬水在漸闊區之波前變化....………110 圖4-66 w=400μm、d=40μm、We =1.47、We =0.01、V=2 m/s、 Q=0.096 ml/min 模擬水的壓力分佈圖..…….………111 圖4-67 w=800μm、d=40μm、We =19.99、We =0.0357、Q=0.353 ml/min 水在波前觀測區之波前流動現象…………...………112 圖4-68 w=400μm、d=40μm、We =10.051、We =0.0682、V=3.76 m/s、 Q=0.181 ml/min 模擬 S-60 黏度液在波前觀測區之波前流動變
化……….………..113
1 2
圖4-69 w=400μm、d=40μm、We =10.051、We =0.0682、V=3.76 m/s、
表目錄
表2-1 微模穴尺寸對照表…...………....39 表2-2 不同深寬比尺寸對照表...………40 表2-3 光阻種類及使用參數……….40 表2-4 各工作流體之特性...………....41 表4-1 靜態接觸角實驗結果……….42符號表
1 2 1 2 A 流道入口之截面積 A 波前觀測區之截面積 Dh 流道入口之等效水力直徑 Dh 波前觀測區之等效水力直徑 d 微模穴之深度 Fb 微體力 Fs 容量力 s f 每單位面際區域之表面張力大小 C 2 1 2 P 毛細壓力 P 截面積之周長 Q 體積流率 1 V 流道入口之速度 V 波前觀測區之速度 We 流道入口之韋伯數 We 波前觀測區之韋伯數 w 波前觀測區之寬度 α 漸闊角度β 漸縮角度 θ 接觸角
κ
平均界面曲率 μ 黏滯力 ρ 密度 σ 表面張力 下標 l 液體性質 g 氣體性質第一章 緒論
1.1 前言
近年來,國內半導體產業睥睨所有高科技產業,其所帶動的經濟 效益有目共睹。由於現代人追求高品質的生活水準,短小輕薄、攜帶 方便的個人化高科技產品的發展已成為不可避免的趨勢。以電腦而 言,由桌上型發展到手提式、甚至掌上型,便為微小化的最佳案例。 至於如何能將產品規格愈做愈小,精密度卻愈來愈高,便是微機電系 統技術的研發範圍。微機電系統(Micro Electro-Mechanical System, MEMS)[1,2]是一 種結合機械、電子、材料、控制、物理、生醫、化學、光學等多重技 術整合的研發領域,其特色為兼具微小化、可量產之新製造技術,不 僅可有效協助製造業改善製程,使產品提高品質、性能與可靠度,進 而提高附加價值,同時可降低製造成本及能源消耗;因而成為目前科 技界人士公認為最具未來發展潛力及前瞻性的研究領域。 微機電技術[3]主要是以矽、玻璃或其他所需之材料作為晶片基 材,並運用既有的微結構細微加工及蝕刻技術於基材使其微小化,並 廣泛運用於資訊、電子、無線通訊、生化等產業。 就微流體系統(Micro-Fluidics system)而言,是將小至幾個微升
(microliter)甚至奈升(nanolilter)體積的液體,導入佈滿微流道的晶片 中,以某種驅動裝置或機械式幫浦(pump),讓液體在微流道中執行混 合[4,5]、分離[6]、加熱[7]、或聚合酶鏈反應(polymerase chain reaction, PCR) [8]等實驗室所用的反應,且廣泛地應用在化學分析、 生物科技、製藥或流場觀測等方面。然而,液體在微流道中流動之現 象會因流體種類及速度、外力作用、流道之表面粗糙度,幾何形狀及 尺寸的改變而不同,對於微流體系統運作之效果有決定性的影響。因 此,分析液體在微流道中流動之現象便成為一項相當重要的課題。
1.2 研究背景
毛細現象於 19 世紀即有科學家開始研究,因受到實驗和技術能 力的限制而沒有新的進展,直到近代才對這方面的問題有較進一步的 突破與了解[9]。 對於傳統大尺寸的管流而言,在絕大多數之情形下,可以將毛細 作用之影響忽略而不會使分析結果失真,但在微尺寸管流中,因慣性 力很小,使得管壁與液體間之作用力足以影響液體在管內的流動現 象。然而,在微流體系統中,多數情形下毛細作用亦可用來當作使液 體流動之驅動力例如:漸縮管徑、局部加熱或改變管壁對於液體之潤 濕性(Wettability)等皆可使液體產生自發性的流動,進而使得微流體裝置能更有效率地運作[10,11]。 因此,要使毛細作用在微流體裝置內成為能夠被吾人所利用之機 制,首先需將有可能影響毛細作用之參數加以分析、釐清並歸納出主 要參數,而後,利用這些參數作為設計微流體裝置之依據,使其能快 速且有效地達到設計目標。 迄今,有關毛細作用之流動現象的研究方面,絕大多數係針對表 面張力、附著力或表面潤濕性,從固、液、氣間界面作用力(Surface Force)產生之表面能(Surface Energy)所導致的壓力差(Laplace Pressure)
為理論基礎,來探討單種流體在毛細管中之新月形波前(Meniscus Front)的變化或不同種類流體在其接觸壁面因毛細作用之影響所產生 的流動現象[12-14]。然而在慣性力作用極低的情況下,附著力、表面 張力、黏滯力的作用變得格外重要,尤以附著力較為複雜且需深入探 討[15]。在描述附著力方面,當流體界面與壁面接觸時,因為流體分 子與壁面分子的引力不同,所以流體界面與壁面會呈現特定夾角,即 所謂接觸角(Contact Angle);而且,接觸角是表面潤濕性(Wettability) 的一個重要指標。當流體表面與固體表面接觸時,若接觸角θ大於 90 ° , 液 體 並 不 潤 濕 固 體 表 面 , 此 一 情 形 稱 之 為 疏 水 性 (Hydrophobicity),相反的,若接觸角θ小於 90°,液體潤濕固體表面,
則稱為親水性(Hydrophility),而親水性對低流速的流動流體而言,可 降低流體推動的驅動壓力,所代表的意義好比是驅動力(Driving Force),疏水性則是代表一個阻力的意義[16]。此外,在研究量測接 觸角的文獻方面,可分為靜態(Statics)及動態(Dynamics)兩種,靜態接 觸角的研究方面,是將單種液滴置於基材表面,液滴與基材表面間之 界面能達熱平衡(thermodynamic equilibium)後,再根據楊氏方程式 (Young Equation)為理論基礎,利用固體-氣體、固體-液體及氣體-液體 之界面能之關係來求得接觸角[17、18],而動態接觸角的研究指的是 單種流體或液滴在毛細管道中以不同驅動力使其穩定流動,而流動之 液體或液滴與毛細管壁間,因液體黏滯力與異類分子間相互作用力達 平衡後,液-氣界面與管壁間所形成之角度即動態接觸角,根據文獻[19] 記載,當慣性力與重力之效應可忽略的前提下,流體在毛細管中流動 可分作兩種情形:預先潤濕之毛細管(Prewetted Tube)與乾燥之毛細管 (Dry Tube),由於兩者在流動過程中,分子間作用力情況並不相同, 所得的動態接觸角有所不同,無論是預先潤濕或乾燥之毛細管,動態 接觸角與毛細係數(Capillary Number)都有著重要的關係,因此,找出 正確的動態接觸角與毛細係數之間的數值關係為目前研究動態接觸 角所著重的目標。而在模擬過程中,接觸角亦決定了流體流動時其流
體界面之正確形狀;因此,對於慣性力、附著力、表面張力以及黏滯 力的影響,會間接反應到動態接觸角,因而觀察動態接觸角的變化, 便成為毛細流動現象之研究不可或缺的一環。除了上述各種力對流動 會產生影響外,毛細管截面幾何形狀的改變[20,21]以及壁面粗糙度 [22]的影響,使得毛細壓力有所不同,進而造成流動現象的改變。然 而,從論文結果[23],發現波前新月型流動現象的改變與慣性力、附 著力、液-氣間界面作用力、截面積的改變都有密切的關係,但沒加 入更多的工作流體及設計條件加以比較出影響流動之主要參數,因此 有其必要性再詳加探討。
1.3研究目的
本研究之目的,在於利用微機電系統之概念和製程技術,設計並 製作出形狀與尺寸不同的微流體裝置,藉由觀測及分析液體(水、標 準黏度液)於不同流動條件下在精心設計之流道內流動之現象,並加 入韋伯數(Weber Number)、毛細壓力(Capillary Pressure)兩個關係式作 為實驗設計之指標,探討附著力(潤濕性)、慣性力、黏滯力與表面張 力對流動之效應,再將現象與 CFD-ACE(U)Modules 模擬軟體所得之結第二章 實驗設計與方法
2.1 微流道設計
本實驗目的在於觀察流體填充模穴過程及輸送現象,藉由新月型 波前的變化分析毛細作用及其他作用力對於液體在微流道內的流動 現象之影響,進而歸納出會影響流動現象之主要參數。影響流體流動 有四種力扮演重要的角色,分別是黏滯力、慣性力、液-氣間之界面 張力及固-液-氣接合面之作用力,以上四種力與流道設計及流率都有 密切的關係。首先,我們對於有關毛細現象的概念在此作一簡單的敘 述[24,25]。 1. 內聚力(Cohesion)與附著力(Adhesion):同類分子間聚合吸引在一 起的力稱為內聚力,而異類分子間相吸引的力則稱為附著力。 2. 液-氣間之界面張力(liquid-gas interfacial tension):如圖 2-1 所示,為液體分子內聚力形成的一種現象。液體中的分子因為受到來自 四面八方的吸引力,因此互相抵消而保持平衡,但是液面分子只 受到向下的吸引力,而沒有向上的吸引力,因此,液面分子隨時 受到一個向下的拉力,彷彿要將它們拉進液體中一樣,這個力就 叫做『表面張力』。因為這股拉力,所以液體表面會收縮到最小的 面積。在自然界中,相同體積的物體中,以球形的表面積最小。
90 3. 潤濕性(Wetting):如圖 2-2 所示,潤濕性也是固-液-氣三相分子間 作用的表現,當液體表面與固體表面接觸時,若內聚力大於附著 力,則接觸角(Contact Angle)θ 大於 ,液體並不潤濕固體表面, 稱為非潤濕(non-wetting),相反地,若內聚力小於附著力,使得 θ 小於 ,液體則潤濕固體表面,此一情形稱為潤濕(wetting)。 o 90 o 4. 毛細(Capillary)作用:因液體分子的附著力、內聚力及表面張力等 的作用,而使與固體接觸的液體表面產生上升或下降的現象。稱 之為毛細作用。 基於上述之概念,為了探討黏滯力、慣性力及液-氣間之界面張 力的關係來分析液體在微流道的流動現象,在此導入二理論式: 1.韋伯數(Weber Number, σ ρV L We 2 = ),其物理意義為慣性力與表 面張力之比值,其中 L 是系統之特徵長度,而本研究中將藉由此無因 次參數值的改變來分析與流動現象之關係。 2.毛細壓力(Capillary Pressure ) cos 4 cos c h p P A D θ σ σ = = θ (1) 由式(1)中可看出毛細壓力與液體之表面張力、潤濕壁面之接觸角 以及流體在微流管道橫截面之接觸周長與截面積比值(perimeter / cross-section area)有關,換句話說在矩形流道中,改變水力直徑(Dh)
1 大小對毛細壓力將帶來影響;因而研究中我們設計不同的幾何條件來 加以比較幾何尺寸因素所帶來之影響。 基於以上所敘述有關毛細作用的基本概念,為了要從實驗中觀察 並探討慣性力、毛細力與表面張力作用之情形,我們設計一微流體裝 置如圖 2-3 所示。此二形狀可分為兩個區域:1.波前變化及流動現象 觀測區,其目的在於瞭解流體在不同設計條件下,從流道流入此觀測 區時之波前變化及流動現象。2.漸闊(縮)區,其目的在於瞭解截面積 漸縮(漸闊)時對於流動現象之影響。而就入口流道寬度部分,根據論 文結果[23]顯示,不同流率所對應之入口韋伯數We1,對慣性力有較顯 著的影響,而在幾何尺寸效應影響方面,深度的改變對填充過程有較 大的影響,但改變入口寬度尺寸方面並無太大的影響,因此,在設計 入口寬度方面,我們採用固定的入口寬度尺寸。而在波前觀測區之幾 何尺寸設計方面,根據論文結果[23],在固定韋伯數We 和流道的寬度 與深度,用不同圓盤孔穴直徑的微流體裝置進行的實驗結果發現,波 前會隨著不同截面積下,而有所改變,但在截面積不斷的改變所造成 速度也跟著不斷的變化,難以斷定波前是受到幾何尺寸效應之影響或 慣性力的改變所致,因此我們才會設計兩種區域,運用波前觀測區與 漸闊(縮)區來分開討論尺寸效應所帶來的影響,而設計尺寸如表 2-1
所示。 此外,由於上述之幾何尺寸所對應之水力直徑皆有所不同,為討 論在相同水力直徑下,不同深寬比所帶來的影響,我們選擇特定的幾 何尺寸所算出的水力直徑,設計數種不同深寬比之幾何尺寸,如表 2-2 所示,期藉由固定水力直徑下,觀測不同深寬比下填充過程的影 響。
2.2 微流道製程
本實驗所使用的微流體裝置之製作如圖2-4 所示,是以半導體製 程技術為基礎,在矽晶圓表面施以微加工而成。製程中我們所選用之 晶圓為(4 吋、<100>),其中 4 吋代表晶圓直徑,而<100>代表結 晶面之密勒指標,亦即為晶格方向。晶格方向對於濕式蝕刻之速率有 很大的影響,但對於乾式蝕刻較無影響。一般而言,濕式蝕刻速率以 <110>最快、<100>次之、<111>最慢,但濕式蝕刻後之壁面垂 直度較差,約為 ,而乾式蝕刻後的壁面垂直度為 。由於 本實驗的微流道結構需蝕刻較深,且壁面垂直度要求較高以減少壁面 垂直度對流動現象之效應,俾於釐清並探討各參數對流動現象之影 響,故選擇以乾式蝕刻方式來製作微流道,且校內的半導體實驗室內 大多數機台之製程僅限於使用4 吋晶圓,因此我們選擇此一規格之晶 o 7 . 54 80o ~85o圓來作為製作微流體裝置之基材。而與晶圓接合(Bonding)之玻璃,我 們選用 Pyrex#7740 玻璃(4 吋),因目前微機電製程中的矽-玻璃接合 方式以陽極接合最為普遍且效果最佳,而Pyrex#7740 玻璃為針對此 一接合方式最有效之材料故選用之。 以下就製作微流體裝置之步驟加以說明: 1. 依照 RCA-Clean 程序,將晶圓清洗乾淨。 2. 將流道暨微模穴圖形利用 AutoCAD 繪製成圖檔,再利用雷射圖形 產生器(LASER-Beam Pattern Generator)製作成光罩。
3. 利用光阻塗佈機(Photo Resist Spinner),將光阻(如表 2-3 所示)均勻 塗佈至晶圓正面。再依照軟烤、曝光、顯影、定影之程序,將光 罩之圖形定義至晶圓正面,並完成硬烤。 4. 利用電感耦合電漿活性離子蝕刻系統(ICP-RIE),將晶圓正面已定 義之流道暨微模穴的矽基材蝕刻至所需深度。 5. 利用超音波震動鑽孔機(如圖 2-5 所示),將出、入口區之矽基材 鑽穿,再依照 RCA Clean 程序,將晶圓清洗乾淨,流道暨微模穴 完成。
6. 依照 RCA Clean 程序,將 Pyrex#7740 玻璃清洗乾淨。
合。 8. 將輸水管與出入口區黏合(如圖 2-6 所示),微流體裝置完成。
2.3 觀測系統
本實驗系統如圖 2-7 所示,液體經由注射幫浦加壓注入微流道 中,利用高速攝影機將影像藉由與個人電腦中的影像擷取卡(VCD- Gear TV Plus)的連結呈現於螢幕上,再利用高速攝影機的控制器上之 面板設定適當的擷取模式,將影像以圖檔的方式擷取、並儲存於電腦 硬碟中,爾後即可經由畫面撥放軟體(ACD See)將之撥放。 以下就各次系統及其操作細節作敘述。 1. 本實驗之目的在於藉由觀測及分析液體於不同操作條件下在模穴 內流動之現象。由於不同種類液體之液-氣間界面張力、密度與黏 滯力不同,所造成之流動現象也會不同。因此選用水當作工作流 體,另外為討論不同黏度等級下液體流動變化,我們選用美國 CANNON 產品之標準黏度液(VISCOSITY STANDARD),使用的工作流體之流體特性如表2-4 所示。而實驗中所使用的 GENIE 可
程式注射幫浦(Programmable Syringe Pump),如圖 2-8 所示,其為
單管注射幫浦,但其背部有 TTL-I/O 插槽,可利用排線與多部注
以 控 制 操 作 條 件 。 其 體 積 流 率 的 操 作 範 圍 介 於 5.832µl/hr 到 1272ml/hr 之間,實驗裝置包括容量 1ml、5ml、10ml 之針筒,可 依實驗中所需之流率及流量作設定。 2. 擷取影像之設備為 Kodak SR-Ultra 高速攝影機及個人電腦(如圖 2-9 所示)。此高速攝影機之影像擷取速率為每秒 30~10000 張畫 面、解析度最高為 512×480,二者可依影像的擷取和操作條件(畫 面大小、光源強弱)來作調整,並可將影像以圖檔儲存至電腦中。 一般而言,解析度越高,所擷取影像之畫面範圍越小,需補更多 的光來增加畫面的亮度。而擷取方式我們選擇END 模式,亦即現 象發生前按下紀錄鍵(Rec. Ready)開始紀錄影像,當現象發生時壓 下觸發開關 (trigger),會將現象發生前之狀態保留下來、並暫存於 控制器內部的記憶體中,再藉由控制軟體將影像從控制器中的記 憶體內轉而儲存到電腦中。此外,控制器內部之記憶體容量(128M Bytes)決定影像擷取之數量,其必需配合現象發生過程之時間長短 來調整擷取速率,亦即影像紀錄時間為影像擷取數量除以影像擷 取速率,例如:流速慢時需降低擷取速率(125FPS、250FPS),而 流速快時需提高擷取速率(500FPS、1000FPS、2000FPS),才能避 免流速慢,過程拍不完;流速快,過程擷取時出現殘影之情形發
生。
2.4 實驗項目與觀測步驟
本研究之目的在於有系統探討出慣性力、黏滯力、附著力(潤濕 性)與毛細作用間對於填充過程的影響。首先,為了瞭解液體與流道 間潤濕之關係,我們必須先實驗出各工作流體與流道表面間之接觸角 關係,因此藉由接觸角儀器量測靜態接觸角,如圖 2-10 所示,其量 測步驟分述如下: 1. 將材料試片置於平台上。 2. 調整光源與焦距,使其可清楚拍攝液珠與材料接觸界面。 3. 旋轉刻度鈕,使定量之液珠大小滴落於材料表面上,如圖 2-11 所示。 4. 在電腦上按下軟體之影像擷取按鍵,為避免液珠之擴散效應, 需盡量保持按下影像擷取的時間一致。 5. 擷取之影像中,於其液珠與材料接觸面選定左右兩點作為水平 線 , 如 圖 2-12(a)(b),接著於液珠圓周上選取三點,如圖 2-12(c)(d)(e),而後由軟體判讀出接觸角度數,如圖 2-12(f)。 6. 重複上述步驟,將數據結果作平均。 另外,除了水能藉由一般流力課本中得知表面張力值外,其餘標1 2 1 2 1 2 準黏度液之表面張力值並無相關資料,因此利用表面張力儀器,如圖 2-13 所示,於室溫 24℃下測得各標準黏度液之表面張力值。 在瞭解各工作流體與流道壁面接觸之關係後,接續的工作在於分 析各參數對於微流模穴填充現過程的影響,故先列出填充過程中可能 影響的參數,如:入口流道暨波前觀測區之寬度與深度,以及注入液 體之種類、流率與對應之韋伯數(We),經由固定其中某幾項參數,改 變其餘項的量來達到分析之目的。為了要清楚慣性力對流動現象之關 係,我們採用兩個不同位置所代表的韋伯數來分別探討。 為入口 流道之韋伯數, 為波前觀測區之韋伯數,兩者之特徵長度我們選 用等效水力直徑(Hydraulic diameter,Dh=4A/P),而計算韋伯數之速 度V 和V ,為體積流率除以其所在位置之截面積 和 。以下,就實 驗暨觀測步驟作說明。 1 We 2 We A A 1. 固定入口之韋伯數We 及分別固定深度(d=40 ,80μm),計算出水和 標準黏度液與其所對應之流率,依此流率分別將液體注入寬度不 同之微模穴中,觀察不同寬度所產生的尺寸效應下,慣性力、毛 細作用力與黏滯力對填充過程所帶來之影響。 2. 固定波前觀測區之韋伯數 及水力直徑 ,計算出不同深寬比 與其所對應之流率,觀察波前觀測區相同水力直徑 與韋伯數 2 We Dh2 Dh
2 We 下,不同深寬比所產生的尺寸效應對填充過程之影響。 3. 固定寬度和深度相同幾何尺寸之微模穴,使用不同流率來具體呈 現毛細作用之填充過程。 4. 延伸波前觀測區之長度,固定相同之波前觀測區水力直徑Dh2、入 口流率,使用深寬比互為倒數之幾何尺寸,如深寬比為0.25(d=180 μm、w=45μm)與 4(d=45μm、w=180μm)兩者間,驗證流率、 深寬比與毛細力間之作用關係。
第三章 理論模式及數值方法簡介
數值分析方面,本論文採用CFD-ACE(U) Free Surface Module 軟
體模擬[26],此法模擬流體前緣的方法採用 Hirt and Nichols 所建立之 VOF 方法,此方法主要在探討液、氣界面表面能與表面張力的關係。 現今此模式可適用於任何不可壓縮之流體且局部的滑移可以忽略不 計,空氣與水即是很好的例子。
在VOF 方法中必須計算流體在計算容積(computational cell)內液
體佔有的容積率F (Liquid Volume Fraction),其中容積率 F 滿足
1 1 ( F) ( VF) t ρ ρ ∂ + ∇ ⋅ = ∂ G 0 (2) 其中下標ρl表示液體密度。然而使用式(2)僅瞭解界面部分的資訊, 而VOF方法必須同時考慮氣體、液體同時滿足動量方程式及連續方程 式,因此 ( V) ( V )V g P ( V) b t
ρ
ρ
ρ
µ
∂ + ⋅∇ = −∇ + ∇⋅ ∇ + ∂ G G G F K K (3)0
V
∇⋅ =
(4) 其中 g g F F F F µ µ µ ρ ρ ρ ) 1 ( ) 1 ( 1 1 − + = − + = (5) 其中ρl、μl表示液體密度和黏度,ρg、μg表示氣體度和黏度,Fb表示 微 體 力(body force) , 而 統 御 方 程 式 之 Fb以 連 續 表 面 力 模 式
(Continuum Surface Force Model , CFS Model )來處理。在自由表面 (free surface),黏滯力是忽略不計的,因而在自由表面就僅只討論表 面張力所帶來的壓力差;在連續表面力模式中,表面張力被重新定義 為一種容量力(volumetric force) Fs,定義為 s s s
F
=
f
δ
(6) s f nδ
= ∇ = (7)ˆ
sf
=
σκ
n
+ ∇
sσ
(8)(
x) (
x y)
y(
z)
z s=
i
−
n
n
∂
+
j
−
n
n
∂
+
k
−
n
n
∂
∇
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
(9)ˆn
κ
= −∇ ⋅
(10) 其中 fs為每單位面際區域之表面張力大小, 為單位界面之法向量, ˆnκ 為平均界面曲率(mean free surface curvature)。
然而,固、液、氣界面的位置是一未知數,它取決於作用在此界 面所有力的平衡,而這些作用力的大小與液、氣間的表面張力和壁面 的接觸角有關;即表面張力和接觸角的大小將決定液體行進時的狀 態,上述統御方程式配合考慮液、固界面的邊界條件即可模擬流體填 充微小流道及模穴的行為。另外,建造液體界面計算的方式有兩種, 即單一線界面計算(simple line interface calculation, SLIC)及片段線性
界面計算(piecewise line interface calculation, PLIC),如圖 3-1 所示, 而在使用本軟體模擬,若要加入表面張力效應於其中的話,則必須採 用 片 段 線 性 界 面 計 算 模 擬 , 而 數 值 方 法 採 有 限 差 分 逼 近(finite difference approximation)解物理模式,其過程參照文獻[27,28]。模擬 的操作步驟如下: 1. 軟體前處理器 CFD-GEOM:繪製微模穴之形狀及構造,接 著將內部體積以網格切細,然後定義邊界性質,如出入口、 邊壁等,完成後匯出檔案給予CFD-ACE-GUI 處理器讀取。 2. CFD-ACE-GUI 處理器:界面中,我們設定模擬方法為 Flow + Free Surfaces(VOF),接著給定流體性質如:密度、黏滯係數、 表面張力;邊界條件我們給定的有二:入口流速與接觸角, 入口流速是以體積流率除以截面積所得之平均速度,接觸角 則輸入實驗所量測出之靜態接觸角值;最後再將起始條件、 疊代次數及其他參數設定完成後即開始進行模擬。 3. CFD-VIEW 後處理器:將模擬結果填充過程、壓力場等呈現。
第四章 結果與討論
一、 實驗結果
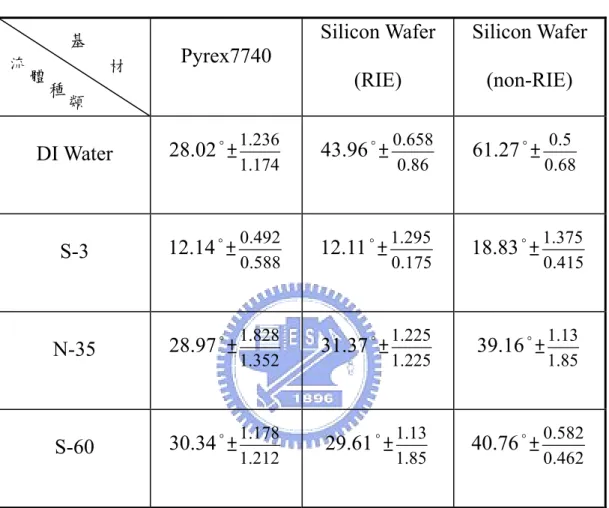
≥ 2 首先,我們討論靜態接觸角量測結果,大致上可分作三種基材與 四種工作流體;基材方面,我們測定材料分別為:Pyrex7740 玻璃、 未經過 ICP-RIE 之矽基材表面與經過 ICP-RIE 處理過後的矽基材表 面;測定之工作流體分別為:DI water 以及三種標準黏度液,其靜態 接觸角量測結果分別如表4-1 所示。根據靜態接觸角結果顯示,在潤 濕表面能力方面,S-3 > N-35 S-60 > DI water,而由靜態接觸角的 實驗結果我們只能大致瞭解工作流體與流道上下表面接觸性質,屆時 在不同流動條件的填充過程中,工作流體在微模穴流動時,波前在與 上下及兩側壁面接觸時會因設計條件的不同而呈現不同之動態接觸 角,我們藉由觀察波前狀況以及與兩側壁面之動態接觸角情形來輔助 判斷填充過程中慣性力或毛細作用力之影響程度。 固定入口之韋伯數 =10 及固定深度(d= 80μm),計算出水和標 準黏度液與其所對應之入口流率,分別將其注入寬度不同之微模穴 中。由圖4-1、4-2、4-3 可看出,在固定入口韋伯數及深度的情況下, 雖然隨著波前觀測區之寬度變寬,相對應波前觀測區的韋伯數We 也 隨著下降,波前與兩側壁面之動態接觸角皆保持大於90°的狀態,所 1 We代表的意義是在這樣的操作條件下,毛細作用力扮演著阻力的角色, 但慣性力不因寬度增加所造成 下降而被毛細作用力所抵銷,因此 慣性力仍為主導波前狀態之作用力;而在漸闊區表現的部分,由圖 4-4(a)~(f)、4-5(a)~(f)可得知,因截面積擴張進而造成波前曲率變的更 為尖銳,從圖 4-4(c)(f)、4-5(c)(f)比較得知,波前在相同之韋伯數 情 況下進入漸闊區時,漸闊角 60°比 30°對波前曲率影響更大,代表前 者受到的較大之毛細壓力阻力所致;在漸縮區部分,如圖4-4(g)~(i)、 4-5(g)~(i)所示,在截面積驟減所對應之水力直徑減縮的情況下,毛細 作用力影響加大,使得波前觀測區之波前在進入此區後,從凸形轉變 為凹形。接著觀察水在深度(d=40μm)、入口之韋伯數 =10,注入 不同寬度之微模穴的情況,由圖4-1、4-2、4-3 與 4-6、4-7、4-8 相互 比較來看,波前觀測區寬度尺寸800μm 下之波前與壁面動態接觸角 仍大於90°狀態,因此仍屬慣性力主導狀態;寬度尺寸 100μm 與 400 μm 下之波前結果出現重要的變化,波前與壁面之動態接觸角呈現小 於90°狀態,波前也由凸形變為凹形,代表毛細作用力抵銷慣性力而 逐漸成為主導力,漸闊區部分比較,如圖4-9(a)~(f)、4-10(a)~(f)所示, 漸縮區部分如圖4-9(g)~(i)、4-10(g)~(i)所示,情況與深度 80μm 的案 例相似,漸闊角 60°仍比 30°波前曲率影響更大,我們可以看出水力 2 We 2 We 1 We
直徑的變化對慣性力與毛細力之間的主導關係將有所影響,因而論文 [23]中,以圓盤孔穴之幾何形狀所做的流動現象,在流動過程中,波 前形狀的變化可說是受幾何變化的影響成分居多。上述之結果我們藉 由表2-1 與式(1)來做個討論,從式(1)我們可以看出毛細壓力與水力直 徑 Dh 有著反比的關係,而當動態接觸角小於 90°時,毛細作用力方 向與流動方向同向,如驅動力一般;若動態接觸角大於90°時,毛細 作用力則屬阻力,因此表 2-1 與圖 4-1、4-2、4-3、4-6、4-7、4-8 對 照來看,隨著水力直徑越小,毛細作用力的影響也逐漸加大,直到深 度 40μm、寬度 400μm 所對應之水力直徑 Dh=73.73 時,毛細力開 始成為主導波前之作用力,在固定的水力直徑下,對於不同深寬比的 組合,其影響將在底下進行討論。 2 在我們前面探討水力直徑所帶來的影響,當水力直徑Dh 減縮至 73.73 時,發現毛細力高於慣性力作用,因而先針對水力直徑 Dh=73.73 設計了不同深寬比之幾何尺寸,如表2-2 所示,深寬比大致可分成大 於、等於及小於 1 的情況來進行討論,另外波前觀測區之韋伯數We 我 們也保持固定值。首先,當深寬比為1 時如圖 4-11 所示,波前與壁 面之動態接觸角呈現大於90°的狀態,代表慣性力未被毛細作用力所 抵銷,屬慣性力主導;接著觀察深寬比小於1 的情形,當深寬比為
0.835 時如圖 4-12 所示,波前與兩側壁面之動態接觸角呈接近 90°的 狀態,而當深寬比為0.435 時如圖 4-13 所示,明顯的可看出波前呈凹 形且與兩側壁面之動態接觸角呈現小於90°,此現象表示毛細力作用 高於慣性力之作用,成為以毛細力主導之狀態,同時我們再觀察深寬 比為0.253 之波前狀態如圖 4-14 所示,發現波前亦為凹形;因此,由 深寬比小於1 的比較可發現,當深寬比越小,毛細力的作用也就越 大。接著觀察深寬比大於1 的情況,首先就深寬比為 10 的結果如圖 4-7 所示,波前呈現微凹狀態,雖然毛細力之作用大於慣性力的作用, 但波前並未完全受到毛細力所牽引,因而波前與兩側壁面之動態接觸 角也僅略小於90°;深寬比為 21 時結果如圖 4-15,雖然計算出之波 前觀測區韋伯數 與其他深寬比案例相同,但由圖4-15(b)我們發 現,因入口韋伯數 較大,中央波前受入口處較大的流率所擠壓, 使得波前變得較為尖銳,而從圖4-15(c)所示,沿著壁面之波前受附 著力的影響,使得靠兩側壁面之波前追趕上中央波前,因而波前曲率 變得較為平緩,但慣性力作用太強,使得毛細力未能將慣性力抵銷; 深寬比為43 時結果如圖 4-16 所示,填充過程與深寬比為 21 時的結 果相近,填充過程亦由慣性力所主導,但我們發現,由於深度較淺, 兩側沿壁面之波前追趕上中央波前的速度相對的也快了許多,代表波 2 We 1 We
前受兩側壁面附著力的影響也越大,而為了更清楚瞭解壁面附著力所 帶來的影響,我們使用深寬比21 與 43 兩者之幾何尺寸,藉由降低入 口韋伯數 來觀察。在深寬比 21 時,入口韋伯數降低至 =10.06, 結果如圖4-17 所示,中央波前在前半段部分受入口壓力的影響,使 得沿著兩側壁面之波前仍落後中央波前,而波前流動至後段時,就如 模擬出的結果類似,中央波前在脫離了入口壓力影響的範圍後,壁面 與液體產生之附著力對流動現象影響相對加大,使得沿兩側壁面波前 得以超越中央波前,如圖4-17(e)(f)所示;而同樣深寬比幾何尺寸, 再將入口韋伯數降低至 =1.009,結果如圖 4-18 所示,慣性力在前 段即被附著力所抵銷,變由毛細力主導波前,此結果與模擬出之趨勢 相當吻合;再進一步觀察深寬比43、入口韋伯數 =1.0133,結果如 圖4-19 所示,當波前僅與上下壁面接觸時,如圖 4-19(a)(b)(c)所示, 波前保持慣性力方向前進,因此波前僅有接觸上下壁面時,附著力的 影響不大,直到波前同時接觸兩側壁面後,毛細作用才真正表現出 來,沿兩側壁面之波前很快地追上中央波前,此時毛細力即改變了波 前型態,如圖4-19(g)(h)(i)所示,若波前觀測區之距離夠長的話,甚 至可以觀察到毛細作用力完全主導波前的流動現象。 1 We We1 1 We 1 We 以上我們觀察完深寬比的結果,發現雖然在相 同水力直徑和波
2 前觀測區之韋伯數 下,理論上雖然波前觀測區的慣性力相同,但 波前卻呈現不一樣的結果,表示改變深寬比的確會對毛細力大小帶來 影響;然而,對毛細管壁與液體之接觸性質,我們只瞭解上蓋玻璃與 底面受過ICP-RIE 製程過後之接觸特性,但在兩側壁面之性質對我們 來說一直是無法瞭解的部分,在相同截面積與水力直徑下,液體與兩 側壁面接觸長度的多寡是否會對流動造成影響,為了印證,因而設計 了兩種可對比之流道,其入口流道之截面積相同,因此在同樣的流率 下入口流速相同,其次進入波前觀測區時的幾何尺寸,一種設計為深 度d=180μm、寬度 w=45μm、深寬比為 0.25,其接觸兩側壁面長度 佔總接觸周長比例為 0.8,另一種設計為深度 d=45μm、寬度 w=180 μm、深寬比為 4,其接觸兩側壁面長度佔總接觸周長比例為 0.2,如 此一來,在進入波前觀測區時韋伯數We 兩者亦相同,另外我們加長 波前觀測區之長度,觀察在不同位置下波前型態的變化趨勢,進而比 較出兩者之差異。首先觀察深寬比為4 的結果,由圖 4-20、4-21、4-22 所示,(a)~(g)代表由入口流道進入波前觀測區為起始點,上游到下游 每 5000μm 的位置進行拍攝,(a)~(g)分別對應 5000、10000、15000 μm…的位置依此類推,此外,受到壁面粗糙度之影響,在我們的拍 攝區域內其波形雖穩定,但動態接觸角會有微量的變化,因此我們以 2 We
統計出之平均動態接觸角度/位置表示波前在不同區域下的結果,然 而由圖中可看出,隨著流動的距離越長,波前曲率與動態接觸角也隨 之下降,代表毛細力主導的程度逐漸提高,接著我們將各流率在不同 位置與量測出之動態接觸角作個統計圖比較,結果如圖 4-23 所示, 我們可以瞭解到,當流率越大時,受慣性力作用變大,因此毛細力抵 銷慣性力所需之距離也越長,但流率較大者其動態接觸角下降的幅度 比流率較小時來的大,代表慣性力越大時受到毛細阻力越大,因而抵 銷慣性力的作用也越強,最後當毛細力主導波前的流動時,動態接觸 角會趨近於50°~60°之間。而深寬比為 0.25 時,不同流率下之波前在 各位置的情形如圖4-24、4-25、4-26 所示,我們同樣將各流率與不同 位置下所量測之動態接觸角作統計比較,結果如圖 4-27 所示我們發 現在不同流率下動態接觸角的下降趨勢與圖 4-23 所顯示結果相近, 流率越大其動態接觸角下降幅度越大且毛細力抵銷慣性力所需的距 離也越長,最後當動態接觸角降至50°~60°之間,角度便趨於平緩而 有所跳動。接著我們將兩深寬比在相同流率下的變化情形作比較,結 果如圖 4-28、4-29、4-30 所示,我們發現深寬比 0.25 的結果,在同 一位置下其動態接觸角皆比深寬比4 的結果來的小,其次隨著流率下 降,兩深寬比其相同位置下之動態接觸角相差也越大,對於這樣的情
形我們歸納出可能有兩方面導致這樣的結果,即壁面性質方面與流率 方面;在壁面方面,欲製作出完美的平整壁面是不太可能達成的任 務,在黃光製程中,曝光能量與顯影時間都會影響顯影出來之圖形壁 面的粗糙度,因而造成ICP-RIE 製程過後,兩側壁面平整度不佳,倘 若流道寬度越窄,相對地影響程度也就越大,而在我們研究中,兩種 深寬比都有受到兩側壁面粗糙度的影響,根據文獻[22]顯示,固體表 面粗糙度對流動中之液體會產生自由能障礙(Free energy barriers),因
此對深寬比 0.25 而言,影響的程度要比深寬比 4 來的大;而在流率
方面,由圖4-28、4-29、4-30 可看出,流率越大,因粗糙度所造成的
自由能障礙(Free energy barriers)效應影響越小。因此對於尺寸微小之 流動現象研究,若有壁面粗糙度的影響,我們可藉由深寬比加大,或 提高流率來減少粗糙度對結果帶來的影響,然而流率提高,毛細力欲 抵銷慣性力所需之距離相對地也會增加。 對於不同黏度之比較方面,由靜態接觸角量測出的結果,我們發 現使用的三種黏度液無論與玻璃或矽基材表面之附著性相當好,尤其 以 S-3 黏度液為最強,其次為 N-35 及 S-60,此外,N-35 及 S-60 兩 種黏度液的黏度相當強,因此在實驗過程中,慣性力的作用幾乎在波 前觀測區的前段即被抵銷,整體而言,此三種黏度液所呈現的結果,
填充過程皆由毛細力所主導。首先觀察S-3 在各尺寸的填充狀況,就 深度80μm、不同尺寸之波前觀測區寬度下的結果如圖 4-31、4-32、 4-33 所示,我們可以明顯看到,流體在一進入波前觀測區後,因流體 與壁面之附著力作用,在前段即形成穩定的波前形狀前進;再與深度 40μm、不同尺寸之波前觀測區寬度下作比較,結果如圖 4-34、4-35、 4-36 所示,我們針對圖 4-32(g)、4-33(h)、4-35(e)、4-36(e)分別作動 態接觸角作量測後發現,結果都在35°~37°左右,代表無論是改變寬 度及深度之幾何尺寸,並未對S-3 黏度液之波前流動帶來太大影響, 因此也說明了附著力主導整個波前之流動現象;接著我們直接觀察比 較N-35 與 S-60 之波前觀測區的部分,N-35 的結果如圖 4-37、4-38、 4-39、4-40、4-41、4-42 所示,S-60 的結果如圖 4-43、4-44、4-45、 4-46、4-47、4-48 所示,此兩種黏度液除了黏度等級不同所造成填充 時間不同外,其液體特性如表面張力、密度以及與靜態接觸角,此兩 者大都相當接近,因此我們觀察到之填充過程也幾近相同,而我們亦 對動態接觸角作量測,針對黏度液 N-35 之案例,我們分別量測圖 4-38(e)、4-39(e)、4-41(e)、4-42(e),所量測出為 40°~45°;黏度液 S-60 之例子我們分別量測圖4-44(h)、4-45(h)、4-47(e)、4-48(e),動態接觸 角亦都在45°~50°,因而我們瞭解到,黏度等級加大後,大部分之慣
性力即被抵銷成為毛細力主導的情形下,液體與壁面兩者間之接觸性 質即為影響波前最主要的因素。我們接著觀察此三種黏度液進入漸闊 (縮)區時的情形,在水的部分,我們從模擬與實驗中已觀察出截面積 突然擴張,會使得毛細阻力加大,而隨著漸闊的角度越大,受到的毛 細阻力也越大,波前亦會更加尖銳;接著觀察三種黏度液進入不同尺 寸下之漸闊區的結果,在漸闊角30°時,如圖 4-49(d)~(f)、4-50(d)~(f)、 4-51(d)~(f) 、 4-52(d)~(f) 、 4-53(d)~(f) 、 4-54(d)~(f) 、 4-55(d)~(f) 、 4-56(d)~(f)、4-57(d)~(f)、4-58(d)~(f)、4-59(d)~(f)、4-60(d)~(f)所示, 此三種黏度液之曲率與壁面接觸角,幾乎不受幾何尺寸的改變影響而 有 所 影 響 , 代 表 毛 細 作 用 仍 主 導 波 前 ; 漸 闊 角 60°的案例如 圖
4-49(a)~(c) 、 4-50(a)~(c) 、 4-51(a)~(c) 、 4-52(a)~(c) 、 4-53(a)~(c) 、 4-54(a)~(c) 、 4-55(a)~(c) 、 4-56(a)~(c) 、 4-57(a)~(c) 、 4-58(a)~(c) 、 4-59(a)~(c)、4-60(a)~(c)所示,雖然波前與壁面接觸角仍未受太大的 影響,但是中央波前已有顯著的變化,且深度尺寸較深時變化越大, 尤其是N-35 與 S-60。由黏度液之液體性質來看,三種黏度液表面張 力值較小而且壁面附著性極強,代表界面分子與分子間的相互牽引力 較附著力弱許多,因而中央波前的改變對動態接觸角沒造成太大影 響,與水比較起來差異性很大,我們探索其原因,發現在我們使用黏
度液進行實驗時,兩側波前與壁面接觸點前方會出現預先潤濕層 (precursor film)的情況,使得液體並非真正與壁面接觸,根據文獻[15] 的記載,其推測極有可能與使用的液體是否為純物質(purity)有很大的 關係,對於非純物質(impurity)之液滴在固體表面進行擴散實驗時,便 會產生預先潤濕層,更進一步研究顯示,此預先潤濕層使得液體與壁 面接觸關係變的相當複雜,同時造成表面張力梯度的產生。在我們研 究中所使用的黏度液成分為礦物油(Mineral Oil),屬非純物質,亦產 生了預先潤濕層,也確時對實驗結果帶來極大的影響,若要能確實比 較出黏度所帶來的影響,則必須找到液體特性相同,僅有黏度等級不 同之純物質,可說是相當困難,因此在我們的研究中,對於幾何尺寸 或慣性力的改變,我們難以藉由動態接觸角來具體呈現黏滯力所帶來 的影響。因此在微尺度下,若有預先潤濕層的產生,對於流動中波前 形狀之研究,其理論與實驗現象之探討將變得更加複雜,因此需要透 過更多的實驗來驗證探討,然而在微尺度下,在黏度液的清理方面較 為困難,丙酮雖可清除模穴中殘餘黏度液,但長期吸入對人體有害, 另外加上製程昂貴且耗時等因素,倘若要深入研究則必須另外尋求其 他製程簡易快速、便宜且流道性質穩定之微模穴製程方法。
二、 數值模擬結果
本模擬欲與實驗結果作比對,我們先選定幾何尺寸 w=400μm、 d=40μm、漸闊角 60°,而入口條件由於軟體的限制,我們必須將實 驗設定之體積流率除以截面積來換算成入口流速,接觸角參數方面, 我們以實驗出之接觸角結果來給定,而模擬維度也以三維的方式來進 行模擬,模擬結果我們以正示圖與側示圖觀察填充過程,以三維的模 擬結果來比對二維的實驗結果。一開始我們設定的入口條件與實驗結 果如圖4-7 一樣的入口流率換算而成的入口流速,模擬過程如圖 4-61 與 4-62 所示,首先討論波前觀測區的情況,中央波前受到慣性力之 影響,快速的向前填充,而沿其壁面之流體因附著力亦快速沿壁面向 兩旁移動,而中央波前向兩旁擴散直到與壁面接觸後,後方氣體來不 及排出而被包覆,因而產生氣泡,過程如 4-61(a)(b)(c)所示,再由圖 4-61(a)(b)之側示圖可以看出流體沿頂面之流動速度要比底面來的 快,接著液體由頂面填充下來,如圖 4-61(c)所示,此現象是由於我 們給定頂面壁面接觸角值較底面與側面壁面小,頂面潤濕性較底面與 側面好,因此潤濕性較佳液體會有較快擴散速度;接著由圖 4-61(d) 我們可看出波前仍在慣性力的影響下形狀屬凸形,必須等到中後段, 毛細力才逐漸抵銷慣性力,波前形狀也由凸形轉變較為平緩,如圖4-61(e)(f)所示,而我們就壓力分佈圖,如圖 4-63 所示,瞭解波前在 波前觀測區之填充過程,中央波前受入口高壓的影響區域,波前位置 必須超過波前觀測區的中段後才可脫離高壓的影響,因此在前半段受 到入口高壓影響,波前屬凸形狀態,直到中後段脫離高壓區的影響 後,毛細作用會逐漸將慣性力所抵銷,新月型波前也由凸形轉變為微 凹的狀態。另外流體進入漸闊區時,受到幾何尺寸的變化,波前明顯 的由平緩的狀態變成凸形,如圖 4-62 所示,根據白努力方程式 (Bernoulli equation): 2
.
2
p
V
gz
const
ρ
+
+
=
(11) 可忽略 當進入漸闊區時,由於截面積逐漸變大而速度下降,使得下游的壓力 會逐漸加大,毛細阻力也會跟著加大,由圖 4-63 之壓力分佈我們也 可看出,漸闊區之壓力分佈越往下游其負壓值越大,因而波前形狀會 越凸,而實驗結果如圖 4-9(a)(b)(c)與模擬結果如圖 4-62(a)(b)(c)兩者 比較,其波前與壁面接觸角以及波前曲率形狀都相當符合。然而,前 面之案例,在我們的實驗結果並未如模擬過程中產生了氣泡,是否因 入口流速較高導致這樣的結果,因此我們試著將模擬之入口流速降 低,並同時在實驗中加大流率,兩方面進行比較,試圖瞭解氣泡產生的原因。首先我們從降低入口流速後之模擬結果如圖 4-64 與圖 4-65 所示,由於慣性力降低,液體與壁面產生之附著力對流動現象影響加 大,由圖 4-64(b)(c)(d),液體由中央入口處流入後,中央波前很快地 被沿兩側壁面之波前超越,之後便成為毛細力主導,而由壓力分佈, 如圖 4-66 所示,中央波前受入口壓力影響的區域縮減至僅約波前觀 測區前段三分之一的距離,因此在脫離入口壓力影響的區域後,沿著 兩側壁面之波前很快的就超越中央波前成為毛細力主導波前,如圖 4-64(c)(d)(e)(f)所示,因而在此模擬過程中便無產生氣泡;在實驗中 加大入口流率方面,我們在寬度w=400μm 的嘗試中,雖有產生氣泡 但較不明顯,因此改由寬度w=800μm 之加以突顯氣泡產生過程,由 圖 4-67(a)(b)(c)所示,我們發現液體高速從流道流出後,波前如子彈 形般向前快速推進,而向壁面擴散的速度遠小於向前推進的速度,因 此液體受壁面附著力之效應來不及發生,接著在前方波前與壁面接觸 時,形成後方氣體來不及排出的現象發生,如圖 4-67(d)(e)(f)所示, 此雖做出氣泡的產生,但模擬與實驗結果不盡相符的是氣泡形成的過 程與位置。 黏度液的模擬方面,實驗中發現對於不同等級黏度之黏度液會產 生不同厚度與長度之預先潤濕層,黏度越大時,預先潤濕層會越短
窄,受到預先潤濕層影響的區域也越小,因此就黏度等級最高的S-60
黏度液進行模擬,結果如圖4-68 與圖 4-69 所示,我們將模擬結果與
圖 4-47 之實驗結果作比較,明顯可看出模擬軟體無法將附著效應與
預先潤濕層的現象正確地呈現出來,而軟體中僅靠調配接觸角的大小 並未能真正地表示出液體與壁面之接觸關係,若要正確模擬有預先潤 濕層之波前流動情形,則理論中必須加入凡得瓦力(Van der Waals forces)的效應於其中,有關這方面研究,目前已發現動態接觸角與毛 細係數(Capillary number)有很大的關連,而相關理論的部分目前尚在 建構中[19]。
第五章 結論
本論文針對微型模穴填充過程中流動現象做探討,研究中以半導 體製程技術在矽晶片上蝕刻微小模穴,並利用光學方式觀測流體流經 微小模穴時流體前緣移動及填充模穴的過程,設計觀察不同模穴尺 寸、工作流體與流動條件下之流動現象,以歸納表面張力、黏滯力、 附著力與慣性力對於填充過程的影響;研究中並配合 CFD-ACE(U) Modules 軟體模擬分析,在分析中加入表面張力的效應模擬流體填充 過程的運動方式,經由理論與實驗分析的比較進一步歸納出會影響流 動現象之主要參數。 由模擬結果得知,當波前脫離入口中央高壓區域的影響後,毛細 作用力便抵銷慣性力而開始主導波前,當流率越大,中央高壓影響的 區域越長,而在進入漸闊區時,截面積擴張進而造成毛細阻力變大, 使得波前由凹形變為凸形;因而從模擬當中我們歸納出影響波前的三 個主要參數,即流率、接觸角值與幾何尺寸的變化。另外,由模擬軟 體之物理模式即可發現,此軟體僅可做出不可滑移邊界條件之結果, 對於黏度液模擬我們難以具體呈現出與實驗相符的結果。 再由前一章的實驗歸納得知,影響波前流動最大因素仍在於液體 與壁面之接觸性質,由靜態接觸角的結果發現,我們可藉由物理或化學方式來改變液體對壁面的附著力,然而附著力越強,其毛細作用也 就越顯著;在幾何尺寸方面,我們可藉由減縮水力直徑來提升毛細力 作用程度,而當水力直徑相同情況下,深寬比不同所造成的流動情形 也會有所差異,在我們的實驗結果發現,幾何形狀趨於方形時,也就 是深寬比趨近於 1 時,毛細作用力會最弱;最後在加長流道來驗證流 率、深寬比與毛細力三者間的關係時,另外一個因素我們發現也必須 考量進去,那就是壁面粗糙度對流動中液體會產生自由能障礙(Free energy barriers),當深寬比越小,代表液體與兩側粗糙面接觸的周長 比例越高,其影響就越顯著;然而在我們實驗發現,流率加大可減少 粗糙度影響的程度,相對地流率越大其所對應之韋伯數也越大,因此 毛細力欲抵銷慣性力所需之距離越長。 而在黏滯力的部分,我們所選用的黏度液在流動過程中,波前與 壁面接觸點之前端會產生預先潤濕層(precursor film),然而此現象的 確使得毛細作用更為顯著,由幾何尺寸與流率的改變都難以影響液體 與壁面接觸關係,因此若要歸類黏滯力所帶來的影響需要更多資訊, 但清理不易及製程昂貴等問題,以致於沒有將此部分作更深入的探 討。
參考文獻
[1] T. R. Hsu, MEMS and Microsystems: design and manufacture McGraw-Hill, 2002.
[2] 陳炳煇,
微機電系統
, 五南出版社, 台北市, 2001.[3] 張志誠,
微機電技術
, 商周出版社, 台北市, 2002.[4] N. Schwesinger, T. Frank, H. Wurmus, “A Modular Microfluid System with An Integrated Micromixer,” J. Micromech. Microengr., Vol.6, 99-102, 1996.
[5] W. Ehrfeld, K. Gebauer, V. Hessel, H. Lowe, T. Richter, “Characterization of Mixing in Micromixers by a Test Reaction by a Test Reaction: Single Mixing Units and Mixer Arrays,” Ind. Eng. Chem. Res., Vol. 38, 1075-1082, 1999.
[6] J. T. Groves, N. Ulman, S. G. Boxer, “Micropatterning of Fluid Lipid Bilay on Solid Supports,” Science, Vol. 275, 651-653, 1997.
[7] J. K. Jun and K. C. Jin, “Valveless Pumping Using Traversing Vapor Bubble in Microchannels,” J. Applied Physics, Vol. 83, No. 11, June, 5658-5664, 1998.
[8] M.A. Northrup, M.T. Ching, R.M. White, and R.T. Lawton, "DNA Amplification with A Microfabricated Reaction Chamber,”
International Conference on Solid-State Sensors and Actuators (Transducers 93), Yokohama, Japan, June 7-10, 924-926, 1993.
[9] M. Madou, Fundamentals of Microfabrication, CRC, Florida, 1997. [10] J. Bico and D. Quéré, “Liquid Trains in A Tube,” Europhys. Lett.,
Vol. 51, 546-550, 2000.
[11] O.E. Jensen, “The Thin Liquid Lining of A Weakly Curved Cylinderical Tube,” J.Fluid Mech., Vol. 331, 373-403, 1997.
[12] J.N. Israelachvili, Intermolecular and Surface Forces, London: Academic, 1992.
[13] V.D. Sobolev, “Surface Tension and Dynamic Contact Angle of Water in Thin Quartz Capillaries,” J. Colloid and Interface Sci., Vol. 222, 51-54, 2000.
[14] S.E. Navti, K. Ravindran, C. Taylor, R.W. Lewis, “Finite Element Modeling of Surface Tension Effects Using a Lagrangian-Eulerian Kinematic Description,” Comput. Methods Appl. Mech. Engrg., Vol. 147, 41-60, 1997.
[15] P.G. de Gennes, “Wetting: Statics and Dynamics,” Rev. Modern Phys. , Vol 57, 827-861, 1985
[16] Y. Lee, J.K. Kim, S. Chung, C. Chung, J.K. Chang, J.Y. Yoo, “Flow Characteristics of Hydrophilic/Hydrophobic Capillaries considering Surface Tension,” Microtechnologies in Medicine & Biology 2nd Annual International IEEE-EMB Special Topic Conference , 560 -564, 2002.
[17] D.Y. Kwow, A.W. Neumann, “Contact Angle Measurement and Contact Angle Interpretation,” Advanced in Colloid and Interfaced Science, Vol.81, 167-249, 1999.
[18] D.Y. Kwow, A.W. Neumann, “Contact Angle Interpretation in terms of Solid Surface Tension,” Colloid and Surfaces A: Physicochemical and Engineering Aspects, Vol 161, 31-48, 2001.
[19] Rachid Chebbi,: “Deformation of Advancing Gas-Liquid Interfaces in Capillary Tubes,” J. Colloid and Interface Sci., Vol. 265, 166-173, 2003.
[20] Marcelo Lago, Mariela Araujo, “Threshold Pressure in Capillaries with Polygonal Cross Section,” J. of Colloid and Interface Sci., vol 243, 219-226, 2001.
[21] P.F. Man, C.H. Mastrangelo, M.A. Burns, D.T. Burke, “Microfabricated Capillarity-Driven Stop Value and Sample Injector,” Presented at the MEMS Conference, Heidelberg, Germany, Jan. 25-29, 1998.
Drop(Bubble) Size on Advancing and Receding Contact Angles for Heterogeneous and Rough Solid Surfaces as Observed with Sessile-Drop and Captive-Bubble Techniques,” J. of Colloid and Interface Sci., vol 179, 37-50, 1996.
[23] 劉文忠, “微型圓盤孔穴內之微流體流動現象分析,” 機械工程研 究所(交大)-碩士論文, 2002.
[24] 王亞偉等,
物理
, 五南出版社, 台北市, 2001.[25] 謝曉星,
基本流體力學
, 東華出版社, 台北市, 1991.[26] Modules Version 2002, CFD Research Corporation,
Cummings Research Park, 2002.
TM
U ACE
CFD− ( )
[27] D.B. Kothe, R.C. Mjolsness, “A New Model for Incompressible Flows with Free Surface,” AIAA Journal, vol 30, 2694-2700, 1992. [28] D.B. Kothe, W.J. Rider, S.J. Brock, “Volume Tracking of Interfaces
Having Surface Tension in Two and Three Dimensions.” AIAA paper, 96-0859, 1996.
表2-1 微模穴尺寸對照表 寬度 w 深度 d 漸闊角度 α 漸縮角度 β 深寬比 w/d 水力直徑 Dh 100 40 30, 60 30 2.5 57.14 400 40 30, 60 30 10 72.73 800 40 30, 60 30 20 76.19 100 80 30, 60 30 1.25 88.88 400 80 30, 60 30 5 133.3 800 80 30, 60 30 10 145.5


![圖 2-1 表面張力之示意圖(圖形參照文獻[25])](https://thumb-ap.123doks.com/thumbv2/9libinfo/8447730.182293/63.892.249.642.380.1020/圖21表面張力之示意圖圖形參照文獻25.webp)