國
立 交 通
大
學
工學院精密與自動化工程學程
碩
士
論
文
輔助重物搬運爬梯機構之系統設計與工程分析
The Design and Engineering Analysis of
Heavy Load Stair-Climbing Mechanism
研 究 生:林政達
指導教授:鄭璧瑩 博士
輔助重物搬運爬梯機構之系統設計與工程分析 The Design and Engineering Analysis of Heavy Load Stair-Climbing Mechanism
研 究 生:林政達 Student:Jeng-Dar Lin 指導教授:鄭璧瑩 博士 Advisor:Dr. Pi-Ying Cheng
國 立 交 通 大 學 工學院精密與自動化工程學程
碩 士 論 文
A Thesis
Submitted to Degree of Automation and Precision Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
In
Automation and Precision Engineering August 2010
Hsinchu, Taiwan, Republic of China
輔助重物搬運爬梯機構之系統設計與工程分析 研究生:林政達 指導教授:鄭璧瑩 博士 國立交通大學工學院精密與自動化工程學程碩士班 摘要 台灣的輔具產業缺乏研發上的投資及訓練,更缺乏整體性的輔具設計 開發。目前學術界雖然有許多爬梯機的設計,但大部份皆在開發階段。已 商品化者則因構造複雜與價格昂貴,使得爬梯機的使用不易普及。本研究 為新型爬梯機構設計,期盼能夠提供結構簡單和準確動作之爬梯機構,作 為爬梯機構使用者之另一種新選擇。本研究並將所收集之專利及文獻加以 整理分類與分析,以作為開發新型爬梯機構之參考方向。 本研究利用系統化的分析問題方法,將爬梯機做一創新設計改善。將 顧客需求透過品質機能展開(QFD),有效率轉換為產品功能特性,以便 快速找到產品需改善的問題點,最後將結合解決發明問題理論(TRIZ)創 意問題的改善方法,利用矛盾矩陣表,得到多方面考量的設計概念。本研 究之結果依照 TRIZ 分析後所提供之建議,對於爬梯機設計及功能特性 上,皆有進一步的創新改善。藉由 SolidWorks 建立 3D 模型,以 COSMOS- Motion 模擬運動,再利用 COSMOSWorks 進行應力、應變、及位移分析, 以確定設計之爬梯機所需的剛性。新設計的爬梯機,可減少馬達輸出功 率,因此可用較小馬達。以縮小實驗機測試,讓原本負載 60kg 的爬梯機, 加裝預先儲能機構後,負載可提高至 70kg 以上。藉此驗證原本設計荷重 200kg 的爬梯機。 關鍵字:品質機能展開、解決發明問題理論、爬梯機
The Design and Engineering Analysis of Heavy Load Stair-Climbing Mechanism
Student:Jeng-Dar Lin Advisor:Dr. Pi-Ying Cheng Degree of Automation and Precision Engineering
National Chiao Tung University Abstract
The assistive technology is lack of sufficient fund in researching, and evaluations of ergonomic engineers and machinery designers in Taiwan. Presently, academic research works on stair-climbing mechanism and most of them are still at the developing stage. Commercialized products are with complex structure and high price so that they are not popular for the users. The objective of this research is to design the stair-climbing mechanism which is expected to provide simply-constructed, and precise in movement. This research collects kinds of stair-climbing mechanism from patent andliterature for classifies and analyses that provides excellent references to design of future stair- climbing mechanism.
Therefore, the problem is analyzed systematically to improve the stair- climbing mechanism by innovation design. Making survey from the customers through Quality Function Deployment (QFD). It is effective way to transforms the product function and characteristic, so the problem can be found and improved fast. Finally it will unify Theory of Inventive Problem Solving (TRIZ), the method to improve creativity question. Using contradictory matrix table to obtain design concept and suggestion that from various aspects will be consider. Result of the research defers to the suggestion of TRIZ analysis, it still has the further innovation improvement regarding the functional design of stair-climbing mechanism. Using SolidWorks build the 3D model. Furthermore, COSMOSMotion for kinematics simulation, COSMOSWorks is used to analyze stress, stain, and displacement, so as to confirm the intensity of the stair-climbing mechanism designed. This reserch use these methods to design the stair-climbing mechanism. That use smaller motor than befor stair-climbing mechanism to climing stairs. To design the new stair-climbing can load 200 kg. The scale stair-climbing carry more than 70kg from 60kg after mount the spring.
誌謝 感謝指導教授 鄭璧瑩博士,在課堂中教導追求學問,及灌輸我們做 研究的方法及態度,過程中老師的治學態度的嚴謹與認真之外,對學生總 是不斷的鼓勵與適度的建議。於就讀研究所期間,適逢全球的經濟不景 氣,及工作轉換的巨變之際,對論文的方向及著力點感到茫然困惑時,感 謝指導教授指引,在以既有的研究架構上釐清論文方向,重新引導題目, 使得論文內容更為充實,以及理論分析的指導,研究觀念及方法的訓練, 才能順利完成此論文。 感謝審查委員陳大潘教授、金大仁教授、楊秉祥助理教授精譬的指 點,增益原來不足之處,讓此論文更加的完整豐富。感謝國立交通大學蕭 國模教授、金大仁教授灌輸正確的有限元素法觀念;蔡佳霖教授導引體驗 MATLAB;均豪公司郎叔建立電腦輔助分析實務運用的基礎;英信引領敲開 COSMOSWorks 大門;朝程在電控上針貴的指導;國睦公司陳建宏課長啟發 此研究領域。 感謝電腦整合設計與製造實驗室的成員勝龍、光耀、紹詩、芳岳、子 澤、俊龍、維廷、漢嘉、首余及專班的瑞海、富隆、方有互相勉勵及協助, 讓我在這個路上並不孤獨。感謝二專同學昭誥、健文、明彬;二技同學國 峰、嘉隆、信德、雯;地球村 Joey 老師、Sam、小嫺、Louis,在繁忙的 日子裡,適時的調節壓力,才能維持動力。 感謝父母、弟朋達、弟媳聿盈支開家中的雜務,讓我心無旁騖,才能 完成碩士學業。 林政達 謹誌
目錄 摘要 ... i Abstract ... ii 圖目錄 ... viii 表目錄 ... xiii 第一章 緒論 ... 1 1.1 背景與動機 ... 1 1.2 文獻回顧 ... 3 1.3 論文架構 ... 5 第二章 產品研究與專利分析 ... 7 2.1 相關產品 ... 7 2.2 專利分析 ... 9 第三章 基本理論 ... 16 3.1 設計原理概論 ... 16 3.1.1 普遍設計方法學 ... 16 3.1.2 公理性設計理論 ... 17 3.1.3 品質機能展開理論 ... 18 3.1.4 解決發明問題理論 ... 18 3.2 QDF 理論... 19
3.3 TRIZ 理論... 23 3.3.1 Contradiction Matrix 矛盾矩陣 ... 25 3.3.2 39/48 項系統特徵參數 ... 25 3.3.3 40 Priciple 40 原理 ... 27 3.4 COSMOSWorks 概論... 29 3.4.1 有限元素分析基本概念 ... 30 3.4.2 COSMOSWorks 基本介紹 ... 33 第四章 功能設計 ... 34 4.1 設計分析 ... 34 4.1.1 以 QFD 設計爬梯機 ... 36 4.1.2 以 TRIZ 設計爬梯機 ... 36 4.1.3 以 QFD 再設計驗證爬梯機 ... 41 4.2 概念設計 ... 46 第五章 工程分析及模擬 ... 51 5.1 運動學分析 ... 51 5.1.1 速度與加速度分析 ... 51 5.1.2 COSMOSMotion 的運動分析 ... 54 5.2 CAE 靜態工程分析 ... 62 5.3 CAE 動態工程分析 ... 67
5.3.1 結構剛性分析 ... 67 5.3.2 彈簧力反作用力分析 ... 71 5.4 挫曲分析 ... 74 第六章 實作及功能驗證 ... 80 6.1 實作 ... 80 6.1.1 第一次實作測試 ... 80 6.1.2 第二次實作測試 ... 82 6.2 功能驗證 ... 84 6.2.1 荷重測試 ... 84 6.2.2 爬梯測試 ... 87 6.3 實驗機 CAE 驗證 ... 88 6.4 討論 ... 90 第七章 結論與未來展望 ... 92 參考文獻 ... 94 附錄 A ... 97 附錄 B ... 101 附錄 C ... 103 附錄 D ... 110
圖目錄 圖 1. 1 爬梯中的輪椅示意圖 ... 2 圖 1. 2 可拆式連桿機構示意圖 ... 4 圖 1. 3 六連桿機構示意圖 ... 4 圖 1. 4 墊塊式上下階梯之輔助裝置 ... 4 圖 1. 5 複合輪式上下階梯之電動輔助裝置 ... 4 圖 1. 6 論文架構圖 ... 6 圖 2. 1 支撐桿式爬梯機構各專利示意圖 ... 12 圖 2. 2 複合輪式爬梯機構各專利示意圖 ... 13 圖 2. 3 鍊式爬梯機構各專利示意圖 ... 14 圖 2. 4 滑台式爬梯機構各專利示意圖 ... 14 圖 2. 5 爬梯機發展歷程 ... 15 圖 3. 1 普遍設計方法學功能結構簡圖 ... 16 圖 3. 2 設計過程模型 ... 17 圖 3. 3 從功能域到物理域的轉換 ... 17 圖 3. 4 品質屋示意圖。粗虛線為 QFD 每個階段所共用的矩陣 ... 20 圖 3. 5 旅行箱設計之品質屋內容 ... 22 圖 3. 6 五層 QFD ... 23
圖 3. 7 TRIZ 與舊設計方式的比較 ... 23 圖 3. 8 節點自由度位移 ... 30 圖 3. 9 元素應力 ... 30 圖 3. 10 上列元素簡化後的剛度矩陣 ... 31 圖 3. 11 CAE 的使用流程(紅底部分為 COMOSWorks 自動設定)... 32 圖 3. 12 SolidWorks 與 COSMOSWorks 整合使用狀況... 33 圖 4. 1 設計流程圖 ... 34 圖 4. 2 由矛盾矩陣中挑選 40 原理流程圖 ... 37 圖 4. 3 滑台式爬梯機 ... 41 圖 4. 4 鍊條鉤爪式爬梯機 ... 41 圖 4. 5 支撐式爬梯機 ... 41 圖 4. 6 複合輪式爬梯機 ... 41 圖 4. 7 凸輪設計機構運轉 4 個象限示意圖 ... 43 圖 4. 8 螺桿式示意圖 ... 44 圖 4. 9 齒條式示意圖 ... 44 圖 4. 10 中空式支撐桿-正視圖 ... 45 圖 4. 11 側邊挾持式支撐桿-剖視圖 ... 45 圖 4. 12 爬梯機構的細部圖面 ... 47 圖 4. 13 爬梯機構結合於推車的立體圖及三視圖... 48
圖 4. 14 爬梯機構位於 0°~180°垂直昇高動作狀態示意圖 ... 49 圖 4. 15 爬梯機構位於 180°時,進行爬梯動作狀態示意圖... 49 圖 4. 16 爬梯機構位於 180° ~ 0°時動作狀態示意圖... 50 圖 5. 1 爬梯機構各部位關係示意圖 ... 52 圖 5. 2 零件互動關係對應圖 ... 55 圖 5. 3 支撐桿位移-時間關係圖 ... 57 圖 5. 4 支撐桿速度-時間關係圖 ... 57 圖 5. 5 支撐桿加速度-時間關係圖 ... 58 圖 5. 6 爬梯機主體位移-馬達旋轉角度關係圖 ... 60 圖 5. 7 爬梯機主體速度-馬達旋轉角度關係圖 ... 60 圖 5. 8 爬梯機主體加速度-馬達旋轉角度關係圖 ... 61 圖 5. 9 精簡模型的網格及相關設定示意 ... 63 圖 5. 10 爬梯機構於 33°時的靜態負荷,應力狀況示意圖... 64 圖 5. 11 爬梯機構於 33°時的靜態負荷,變形狀況示意圖... 64 圖 5. 12 爬梯機構於 98°時的靜態負荷,應力狀況示意圖... 65 圖 5. 13 爬梯機構於 98°時的靜態負荷,變形狀況示意圖 ... 65 圖 5. 14 爬梯機構於 180°時的靜態負荷,應力狀況示意圖 ... 66 圖 5. 15 爬梯機構於 180°時的靜態負荷,變形狀況示意圖 ... 66 圖 5. 16 爬梯機構於 33°時的動態負荷,應力狀況示意圖... 68
圖 5. 17 爬梯機構於 33°時的動態負荷,變形狀況示意圖... 68 圖 5. 18 爬梯機構於 98°時的動態負荷,應力狀況示意圖... 69 圖 5. 19 爬梯機構於 98°時的動態負荷,變形狀況示意圖... 69 圖 5. 20 爬梯機構於 180°時的動態負荷,應力狀況示意圖... 70 圖 5. 21 爬梯機構於 180°時的動態負荷,變形狀況示意圖... 70 圖 5. 22 彈簧模擬設定及網格示意圖 ... 72 圖 5. 23 受力位移示意圖 ... 72 圖 5. 24 彈簧在不同線徑的變形量、k 值比較圖... 73 圖 5. 25 彈簧在不同線徑的變形量、彈簧力比較圖 ... 74 圖 5. 26 動力模擬負載示意圖 ... 75 圖 5. 27 支撐桿在動力模擬時的位移-時間對照圖 ... 76 圖 5. 28 支撐桿在動力模擬時的速度-時間對照圖 ... 76 圖 5. 29 支撐桿在動力模擬時的加速度-時間對照圖... 77 圖 5. 30 爬梯機構於 180°時,模態一的挫曲狀況示意圖... 78 圖 5. 31 爬梯機構於 180°時,模態二的挫曲狀況示意圖... 79 圖 6. 1 手推車外型圖 ... 80 圖 6. 2 支撐桿及軸承座變形 ... 81 圖 6. 3 不均勻的變形 ... 82 圖 6. 4 修改後爬梯機 ... 82
圖 6. 5 無彈簧預力側視圖 ... 83 圖 6. 6 無彈簧預力正視圖 ... 83 圖 6. 7 有彈簧預力側視圖 ... 84 圖 6. 8 有彈簧預力正視圖 ... 84 圖 6. 9 爬梯機荷重測試流程 ... 85 圖 6. 10 爬梯機荷重測試 ... 86 圖 6. 11 爬梯機撐起狀態 ... 87 圖 6. 12 爬梯機完成爬梯動作 ... 87 圖 6. 13 直接以手推車爬階梯快到臨界點的情況 ... 88 圖 6. 14 實驗機的 CAE 設定狀態 ... 89 圖 6. 15 實驗機在 180°的應力狀況示意圖 ... 89 圖 6. 16 實驗機在 180°的變形狀況示意圖 ... 90
表目錄 表 1. 1 衛生署對醫療用爬梯機構定義及分類... 2 表 2. 1 爬梯機比較一覽表 ... 8 表 2. 2 爬梯機的種類及說明 ... 9 表 3. 1 39 項矛盾參數 ... 25 表 3. 2 新增 9 項矛盾參數 ... 27 表 3. 3 40 原理 ... 27 表 4. 1 爬梯機的種類及代表公司 ... 35 表 4. 2 爬梯機的部份品質屋 ... 36 表 4. 3 改進系統特徵參數篩選說明表 ... 38 表 4. 4 篩選過後的爬梯機矛盾矩陣 ... 39 表 4. 5 TRIZ 40 原理適用比較表 ... 40 表 4. 6 可運用的原理 ... 40 表 4. 7 爬梯機的品質屋 ... 42 表 4. 8 機構性能的比較 ... 42 表 4. 9 動力源的比較 ... 45 表 4. 10 支撐桿的形式 ... 45 表 4. 11 美國政府將醫療用爬梯機構列為 3 級... 46 表 5. 1 零件互動關係對應表 ... 55
表 5. 2 馬達旋轉角度-支撐桿位移對照表 ... 56 表 5. 3 馬達旋轉角度-支撐桿速度對照表 ... 57 表 5. 4 馬達旋轉角度-支撐桿加速度對照表 ... 58 表 5. 5 馬達旋轉角-爬梯機主體位移對照表 ... 59 表 5. 6 馬達旋轉角-爬梯機主體位速度照表 ... 60 表 5. 7 馬達旋轉角-爬梯機主體加速度對照表... 61 表 5. 8 爬梯機零件一覽表 ... 62 表 5. 9 材料性質一覽表 ... 63 表 5. 10 爬梯機構的最大應力及最大變形值。... 67 表 5. 11 爬梯機動態時於最大應力及最大變形值 ... 71 表 5. 12 彈簧在不同線徑的 k 值比較表 ... 73 表 5. 13 彈簧在不同線徑的彈簧力比較表 ... 74 表 5. 14 挫曲負載係數說明表 ... 78 表 6. 1 爬梯機荷重測試比較 ... 86 表 6. 2 爬梯機在 180°時 CAE 結果的比較 ... 90 表 6. 3 70kg 與 200kg 設定比較表 ... 91
符號說明 A 面積 B 支點 C 滑塊 D 滑塊 E 材料彈性模數 F 力 I 剖面最小慣性矩 L 被動連桿長 O 連桿旋轉中心 R 主動連桿長 T 動能 a 滑塊加速度 k 勁度 m 質量 v 滑塊速度 x 連桿端點與最大伸長點距離 y 連桿端點與連桿旋轉中心距離 θ 主動旋轉角 φ 被動旋轉角 σ 應力
第一章 緒論 1.1 背景與動機 輪子的發明,讓人類可以更方便的移動,以及加快人類移動的速度, 也因此孕育出各種道路及道路品質也日益提升。在點與點之間的移動變快 的同時,也加速了都市快速發展,都市中的建築多半擁有 2 層以上的樓 層,也區分為有電梯及無電梯的建築。在無電梯的建築當搬運重物時即會 遇到階梯這樣的障礙,既使是有電梯的建築,也會有將一樓地板提升的狀 況,例如:交大的工程五館。這些都會嚴重影響搬運的順暢度。雖然「無 障礙空間」在世界上日益被重視及執行,但還是有很多場合無法讓重物搬 運用於無障礙空間或缺少無障礙空間的場合。因此國外在 20 世紀中期即 陸續展開此類機構的發展,近幾年,在日本及歐洲則將此產品延伸到醫療 器材上,進行輪椅的上下階梯搬運,如圖 1. 1 所示[ 1],以因應該地區 的傳統建築有的階梯狀況。 在英文的使用上,Stair climbing 除了表示為輔助於階梯升降的機 構外,也用於運動健身器材的階梯攀爬健身器,及爬階梯運動比賽,如國 內每年舉行的台北 101 金融中心大樓的登高比賽。而在中文的使用上,相 關器材也有多種說法,目前國內的主管機關中,衛生署因應醫療設備的分 級需要,將其命名為「爬梯式」輪椅如表 1. 1 所示[ 2],將此設備列為
圖 1. 1 爬梯中的輪椅示意圖
1.2 文獻回顧 國內陸續有公司進行此產品的開發,但在包括醫院、康健中心…等醫 療機構,都陸續從國外引進此設備用於坐於輪椅上的患者。部分與大學合 作的醫療機構,也將國外產品改良,讓其更適合於國內的使用環境。 廖嘉郁提出在手動輪椅上加裝一組可拆式連桿機構,如圖 1. 2 所示 [ 3],機構尺寸的合成,則是使用最佳設計方法,以理想足部軌跡曲線為 目的,找出各組機構的最佳尺寸。最後在電腦上對所合成出之最佳尺寸進 行動態模擬,並選取其中耦點軌跡曲線較理想的兩個構想試作出原型,將 之安裝在輪椅上測試。將爬梯連桿組裝於輪椅的大輪軸心上,再以手動方 式驅動連桿組,使輪椅升到障礙物之上。在實務的運用上是障礙克服用的 升降機構,可以在大面積的障礙物上運行。 謝宗融提出在電動輪椅上加裝一組六連桿機構,如圖 1. 3 所示[ 4], 利用機構合成之方法,在確立設計需求與設計限制後,再不斷修改符合攀 階功能的機構,以便找出適合本研究所需要之攀階輪椅機構,最後進行尺 寸合成,將所設計之機構成功應用至機械裝置上。再利用 Pro/MECHA- NICA 進行應力、應變、及位移之分析,以確定該設計輪椅所需之強度。再配合 財團法人自行車暨健康科技工業研究發展中心來進行實機試驗。其功能使 輪椅升到障礙物之上。在實務的運用上是障礙克服用的升降機構,可以在 大面積的障礙物上運行。
圖 1. 2 可拆式連桿機構示意圖 圖 1. 3 六連桿機構示意圖 鄭璧瑩博士設計一種具跨越障能力的輪型機器人如圖 1. 4 所示 [ 5],以置放墊塊的方式分段減小台階的斷差高度,使輪型機器人能以較 小的馬達扭力需求跨越一般同輪徑載具所不能跨越的台階。 賴泓昇構想複合輪式上下階梯之電動輔助裝置,如圖 1. 5 所示[ 6], 以 2 個輪子交替行進,以跨越障礙。 圖 1. 4 墊塊式上下階梯之輔助裝置 圖 1. 5 複合輪式上下階梯之電動 輔助裝置
1.3 論文架構 第一章 緒論:說明本論文研究之動機與背景、文獻回顧與論文架構 的介紹。 第二章 產品研究與專利分析:藉由對市面上的產品,及專利的蒐集 及整理,來了解爬梯機所要的功能特性。 第三章 基本理論:介紹本研究所要用的設計理論-品質機能展開 (QFD)、解決發明問題理論(TRIZ)。及模擬分析的電腦輔助工程(CAE) 理論及軟體 COSMOSWorks。 第四章 功能設計:以第三章的設計理論來設計爬梯機,先以品質機 能展開確認規格,再以解決發明問題理論設計幾種爬梯機輪廓,最後再回 到品質機能展開評定擇優所要的爬梯機型式。依此結論再以 SolidWorks 建立 3D CAD 模型。 第五章 工程分析及模擬:以 COSMOSMotion、COSMOSWorks 對此 3D CAD 模型進行 CAE 模擬,確定爬梯機的性能。 第六章 實作及功能驗證:將設計成果具體實體化,以驗證設計功能。 第七章 結論與未來展望:討論此設計結果,並討論其未來發展的趨 勢及跨學科研究的方向。
圖 1. 6 論文架構圖
緒論
產品研究與專利分析
基本理論
設計及模擬
研究動機、文獻回顧 以市場的產品及專利 彙整產品特性 設計原理、CAE原理介紹 以設計理論設計爬梯機 再輔以CAE模擬驗證實作及驗證
以實際的成品,驗證設計結論與未來展望
討論模擬結論與未來展望第二章 產品研究與專利分析 2.1 相關產品 歐洲因其歷史文化及生活環境關係,在古蹟建築內,增設現代化升降 設備會危害建築的結構,故歐洲在開發此類產品的態度最為積極,因此開 發以附加的方式的爬梯機構,包括有階梯爬升椅(Chair Lift)、階梯爬 升機(Stair Lift)、及本研究的爬梯機。目前市面上的主要產品概述如 表 2. 1 所示[ 7] [ 8] [ 9] [ 10]。在美國,爬梯機則幾乎為搬運重物 用的手推車,而 Johnson & Johnson 公司發展的 iBOT 4000 雖然性能優異, 但由於曲高和寡、售價達 US$30,000 導致市場反應不佳,也於去(2009) 年結束營業。
表 2. 1 爬梯機比較一覽表
製造商 AAT SANO TGR Alber AAT HERCILES SANO
機型 C141 PT Uni SCOIATTOLO Scalamobil S30 C-Max U1 SR 1750 MTK 190
爬升機構 支撐桿 支撐桿 複合輪 複合輪 支撐桿 履帶 支撐桿 外觀尺寸 cm 138 H 45 W 30 D 113 H 76 W 38.5 D 110 H 56 W 80 D 114 H 73 W 55 D 109 H 48.5 W 91.5 D 32 H 72 W 119 D 152 H 51 W 51 D 重量 kg 26 27.6 52 24.5 31.7 175 38 負載 kg 140 130/160 160 120 160 1000 190 功率 V;Ah 2x12; 5 12; 5.2 12; 55 2x12; 3.4 2x12; 5 110/220 2x12 馬達功率 w 150 175 750 爬梯速度 Step/M 8 - 30 10/14/18 20 6–16 8-23 3 m/min 8-18 梯高 cm 20.5~23 4 ~ 20 25 21 續航力 Steps 30 300 ~ 500 1350 300 150-300 170
2.2 專利分析 專利的種類上,美國自 20 世紀 60 年代開始陸陸續續開發各式各樣的 爬梯機構,日本及歐洲後續也加入此市場,其中的形式主要分為五種,如 表 2. 2 所示: 表 2. 2 爬梯機的種類及說明 支撐桿式 以支撐桿將所要爬梯的機構撐起或放下至下 一階的階梯。 複合輪式 以兩個以上的輪子,交替運動將主體推上或 下降。 履帶式 以履帶一次跨越數個階梯,如爬坡般進行爬 梯運動。 分離滑台式 主結構分為兩部份,當一邊固定時,另一部 分則滑移到所要前往的階梯。 鍊條式 在主結構上有一組鍊條,鍊條進行循環運動 時,其上的鉤爪鉤住階梯以進行爬梯運動。 將相關專利槪述如下: 在支撐桿式的結構中。 U. Alber[ 11]以馬達驅動曲柄(20)轉動,帶動受限於套管(22)而呈現 公轉直線運動的爬梯桿(24),隨著套管(22)擺動而進行爬梯動作,如圖 2. 1 a 所示。 U. Alber[ 12]再提出以馬達經由軸(19)帶動曲柄(20)轉動,軸(19)同 時也帶動鏈輪(29)以 1:1 速比帶動曲柄(20)另一端的鏈輪,讓曲柄(20)另
一端上的支撐桿組(22)(24)在曲柄(20)轉動時,保持不變的狀況以進行爬 梯動作,如圖 2. 1 b 所示。 U. Alber[ 13]讓動力驅動方式,改以動力與支撐桿之間以齒輪的連 結,如圖 2. 1 c 所示。 U. Alber[ 14]以圓周運動帶動桿件(15)進行直線運動(本體移動為曲 線,正好避開階梯),桿件(15)中間的支點從動於連結件(17)的圓周運動, 使桿件(15)上端支點拘束於桿型連結件上為往復運動,帶動桿件(15)自由 端進行爬梯動作,實施例為貨運,實際也運用於醫療上,如圖 2. 1 d 所示。 M. Alber[ 15]讓支點(30)拘束筒件(18)只能擺動,旋轉件(28)以旋轉 方式帶動套於筒件(18)的桿件(20)往復運動及擺動,使桿件(20)自由端進 行爬梯動作,如圖 2. 1 e 所示。 K. S. Mobus[ 16]以 2 個同轉向的軸心引導曲柄連動桿件同時進行徑 向及軸向移動(類似逆向的蒸氣火車驅動輪),如圖 2. 1 f 所示。 J. Bierma[ 17]讓馬達(15)驅動轉動件(13)旋轉,帶動被槽(11)往復 拘束的桿件(9)擺動,與固定右支點而只能擺動的桿件(8),分別以支點連 結支撐桿(5)行程的爬梯路徑(18),如圖 2. 1 g 所示。 J. Bierma[ 18]用動力組(8)轉動有支點(L)的曲柄(9),再與有輪子(13) 的筒件(10) 以另一支點結合,筒件(10)套於因支點(S)而一起擺動的軸件 (11),此擺動以輪子(13)與階梯接觸來進行爬梯動作,如圖 2. 1 h 所示。
S. B. Wessic[ 19]以馬達(33)上的齒輪(25),帶動齒輪(36),使的結 合一起的支桿(37)一起轉動,支桿(37)上的輪(42)攀越上一階,完成爬梯 動作如圖 2. 1 i 所示。 W. Gemeinhardt[ 20]則是最早以手動攀越方式的機構,支桿輪(31)與 連桿(37)(41)(29)(29")以支點與主體(23)結合成 4 連稈機構,當攀越輪 (27)遇到障礙時,支桿輪(31)抵在地面當支點,用 4 連桿輔助,使攀越輪 (27)攀越階梯如圖 2. 1 j 所示。 圖 2. 1 a 圖 2. 1 b 圖 2. 1 c 圖 2. 1 d 圖 2. 1 e 圖 2. 1 f
圖 2. 1 g 圖 2. 1 h 圖 2. 1 i 圖 2. 1 j 圖 2. 1 支撐桿式爬梯機構各專利示意圖 複合輪式則分別有 2 輪式、3 輪式及多輪式。且在 3 輪以上時,輪子同 時也是平地運輸的輪子,專利概略如下。 T. Emilio[ 21]在電動輪椅上裝爬梯機構,以齒輪、鏈條、鏈輪搭配 三輪繞爬梯軸心達成爬梯動作,如圖 2. 2 a 所示。 J. Reimann[ 22]複合輪傳動機構,以三輪繞爬梯軸心達成爬梯動作, 以齒輪搭配讓三輪上下階梯,如圖 2. 2 b 所示。 2 輪式則有 U. Alber[ 23]以輪(12)以支點(28)與骨架(31)(19)結合, 再一起與主體擺動結合在支點(20),爬梯時以馬達驅動輪時,輪(12)圓轂 外緣上的小頂輪(18)撐起整個主體,讓主體上之小輪登至上一階,如圖 2. 2 c 所示。 U. Alber[ 24]以馬達帶動鏈條使鏈輪(21a)(21b)轉動,使與其偏心的 輪(17a)(17b)呈現公轉,同時輪(17a)(17b)中心(19a)(19b)有鏈輪與鏈輪
(21a)(21b)連動,讓 2 個輪(17a)(17b)公轉轉動,來進行爬梯動作。輪 (17a)(17b)有煞車機構,當有一輪上下階時,另一輪則煞住不動,如圖 2. 2 d 所示。 B. Thomas[ 25]以 2 個輪(17a)(17b) 公轉轉動,來進行爬梯動作。其 爬梯速度,以感測器偵測在快抵達階梯時,速度會降下以達緩著地,如圖 2. 2 d 所示為上一專利的性能提升。 圖 2. 2 a 圖 2. 2 b 圖 2. 2 c 圖 2. 2 d 圖 2. 2 複合輪式爬梯機構各專利示意圖 E. Trougouboff[ 26]在爬梯部(23)固定於鏈條(3)上,當鏈條(3)進行 循環運動時,爬梯部(23)抵住階梯進行上下階梯動作。當感測輪(14)因階 梯邊緣落差,而藉由支臂(15)讓輪(10)停止轉動,如圖 2. 3 a 所示。然後 以專利 FR2527155[ 27]裝感測輪(40)(47)因階梯邊緣落差,而牽引棘爪(35) 去阻止棘輪(31)及所固定的輪(15)繼續轉動,防止輪子滾下階梯,如圖 2. 3 b 所示。
C. N. Mortenson[ 28]以運動跑道型機構,內部自成循環,輔助爬結 實靠住階梯,減少手推車與階梯間的摩擦,都使用於貨物搬運。專利包含 此機構於不用時可以收納,如圖 2. 3 c 所示。 圖 2. 3 a 圖 2. 3 b 圖 2. 3 c 圖 2. 3 鍊式爬梯機構各專利示意圖 C. E. Rhodes [ 29]將主體分為 2 部分,有 輪子部分(12)先上階梯,乘載部分(35)再上去。 反之,則乘載部分先下階梯。都用在貨物用 Stair Climber。本專利的專利點是在以導螺桿來帶動爬 梯動作,如圖 2. 4 所示。 圖 2. 4 滑台式爬梯機構各專利示意圖 經由專利的研判,雖然美國沒有研發半自動形式的爬梯機構,但歐洲 品牌有申請美國專利,可知歐洲產品有銷往美國。而且爬梯機在早期為簡 易的使用單純的機械式,到後來隨著人口高齡化、女性進入勞動市場及運
送物品日益重量化,以人力驅動的機構已經無法負荷相關作業,則完全演 進到需要外掛動力組,來完成爬梯的作業。歸納上列內容,爬梯機構的發 展歷程為越來越方便及省力,如圖 2. 5 所示: 全人力 以機構減少上階梯時的阻力 如:複合論、斜板(靠在階梯凸出部份)
↓
全人力 以機構抵消下階梯(斜坡)時的重力 如:棘輪、剎車↓
半動力 以機構進行直線上下階梯的荷重作業,人員確認上下階 時的偏擺,及在階梯上的位置(是否順利升降到階梯面) 如:油壓缸、導螺桿、曲柄、鍊條支撐桿↓
全動力 機構進行曲線上下階梯的荷重作業,以感測器偵測是否到 位,人員只負責方向控制。開始用於醫療用人員搬運 如:曲柄支撐桿、複合論↓
全自動 動力可以前進後退,控制器掌控 Roll(滾)、 Pitch(仰俯)、Yaw(轉)、上下 如: iBOT 4000 圖 2. 5 爬梯機發展歷程第三章 基本理論 3.1 設計原理概論 為了讓產品快速的推陳出新,世界各國競相發展各式設計理論或是將 別人的設計理論加以推演,檀潤華[ 30]針對世界各地,及不同思考方式及 特性,分別舉出幾個設計理論: 3.1.1 普遍設計方法學 圖 3. 1 普遍設計方法學功能結構簡圖 Pahl 及 Beitz 將德國經年累月的設計經驗總結一個學理,稱為普遍設 計方法學(Comprehensive Design Methodology)。該方式為在概念設計時, 先行建立整體架構,主功能建立後,在分支次功能,在依序分之下去,到 最後的執行面如圖 3. 1 所示[ 30]。物料流、能量流、信號流建立輸出輸 入機能就成了產品的架構,此理論對產品定義、技術設計和細部設計皆有
效,但因為理論是建立在概念形成後在去分項規劃,所以不適合於概念設 計。且原理是建立在經驗法則上的歸納,所以也偏向適合於經驗較為豐富 的設計人員。 3.1.2 公理性設計理論 公理性設計(Axiomatic Design,AD)由美國麻省理工學院(MIT)的 設計理論研究小組所提出。設計過程如圖 3. 2 所示[ 30]。 圖 3. 2 設計過程模型 圖 3. 3 從功能域到物理域的轉換 概念設計是從功能需求轉換到設計參數,如圖 3. 3 所示[ 30],轉換 的詳細表示。該原理的核心是在轉換過程中功能需求與設計參數滿足獨立
性與最小信息這兩條公理。滿足這 2 條公理則理論解即為最佳化解。所以 優點在於能在設計過程中判斷該設計結構是否為最佳化設計。但若設計不 能滿足獨立性,就需要靠經驗解決。
3.1.3 品質機能展開理論
品質機能展開(Quality Function Deployment,QFD)由日本赤尾洋 二(Yoji Akao)與水野滋(Shigeru Mizuno)所提出,除了日本以外,也 被我國及美國廣泛的使用。 設計者為了縮短產品開發週期,須先確實釐清客戶的產品需求(在實 際的狀況中客戶的需求總是天馬行空,甚至客戶也不了解自己的需求),新 產品依此為基礎往後展開。QFD 經由品質屋(House of Quality,HOQ)建 立客戶所要功能及產品功能之間的關連性,其相互關係可以一直延續到製 造過程。 QFD 雖然在各種行業中被廣泛使用,但其只定義出產品功能的概略目 標,但沒有確切的提供如何達成這些功能的具體方法及規則。 3.1.4 解決發明問題理論
解決發明問題理論(Theory of Inventive Problem Solving,原俄文 Теории Решения Изобретательских Задач,ТРИЗ,英文音譯 Teoriya
Resheniya Izobreatatelskikh Zadatch,TRIZ)為俄羅斯 Genrich Altshuller 提出。其理論於 1950 年代開始發展,直到蘇聯解體此理論才為 西方國家所知。 G. Altshuller 堅信有一種理論,可以整理出發明問題的原理,不僅能 提高發明的成功率、縮短發明週期,也使發明問題具有可見性。其核心為 技術系統進化理論,即技術系統一直處於進化之中,解決衝突是其進化的 推動力。將工作原理過程具體化,提出了規劃、算法與發明原理,及普遍 性工具供設計人員使用,以盡快得到滿意的解。 檀潤華所歸納出這些方式中,本研究將使用 QFD 及 TRIZ 的設計法則, 故對此二者再深入介紹。 3.2 QDF 理論 品質機能展開其定義為:[ 31]「一種結構化的技術方法,將形成品質 保證的職能或業務,依目的、手段系列作步驟的細部展開,使得經由組織 中業務機能的展開,完成品質活動,確保客戶的需求得到滿足。」傅鶴齡[ 32] 以工程的角度作了下列說明「讓設計人員在設計過程中,對產品有一個明 確之指標,在量化數據與客戶需求一致下,有一具體之概念,據此可以縮 短設計時間,同時及早注意到生產製造之限制及那些是要優先處理之問 題;不但可以降低設計及多餘之工程變更外,更可使產品早日上市,增加
市場之競爭力。」因此 QFD 是全面性的功能衡量指標,不只著重在設計層 面,往前推展到企劃,向後延伸到生產。 主要的內含在於每一階段以矩陣來表達「需求(What)」與「方法(How)」 之間的關係,並佐以符號、數字來表示二者之間的關係強度。「方法(How)」 的目標值與予以「量化(How much)」置於矩陣底部,也就是品質屋的雛型, 如圖 3. 4 粗虛線區域所示。然後將此矩陣延伸至不同階段。 圖 3. 4 品質屋示意圖。粗虛線為 QFD 每個階段所共用的矩陣 在 QFD 中,設計原理主要使用為品質屋,圖 3. 4 所示的全部 6 個區域 即為品質屋,經由品質屋可以有效建立客戶所要的需求及品質,必免設計 過程中,因為對客戶的需求有錯誤的認知,而造成不必要的時間、成本及 品質的浪費,傅鶴齡對品質屋的 6 個區域說明如下[ 32]。並以旅行箱的設 計舉例顯示品質屋所要列出的內容,如圖 3. 5 所示[ 33]。 (1) 客戶的需求,轉條列為數據、文字,依重要性依序由上往下排
列。在 QFD 中後續的工作程序都依此展開。 (2) 規劃中矩陣:含市場調查研究及策略規劃,本研究中沒有市場 調查,直接使用策略規劃。其中要包含下列訊息。量化市場的 資訊、產品的策略標的、客戶的分等。 (3) 技術配合:完成產品的程度?資源是否充足?技術瓶頸?關鍵 技術? (4) 關聯表:包括客戶需求、技術獲得及技術難易度。即第 1、3 項 之間的關聯性說明,技術能量評估。 (5) 技術性能之相關性:第 3 項的技術項目之間的相關性。相關性 高,則數字高。即 2 個技術會彼此相互影響,因此要建立替代 方案(Alternate Technology)。 (6) 技術矩陣:包括技術性能、競爭者技術等級。其具體要呈現出 依客戶需求的優先順序,對第 3 項所述的技術進行排名、量化 競爭者能力、技術性能等級。
圖 3. 5 旅行箱設計之品質屋內容 完成品質屋的設計及企劃之後,將所建立的資訊往下游製程的生產、 品管展開,即為 5 層的 QFD,如圖 3. 6 所示[ 32],為一般產品即可使用的 流程。設計階段包含了前 3 層,如圖 3. 6 框選所示,但並非表示由設計/ 研發單位獨立完成這 3 層。視公司規模而定,由設計單位的上下游單位合 力完成這 3 層,上游單位包括業務/行銷、專案、企劃…等單位;下游單位 包括生產/製造、品管、物料…等單位。後 2 層雖然在 QDF 系統內所佔部份 較小,但卻是產品開發流程中,動員人力、物力最龐大的一環,故在前 3 層所形成的不良現象,要進行設計變更外,對後 2 層所造成的影響就是重 工及物料報廢。可謂不得不謹慎。
圖 3. 6 五層 QFD 3.3 TRIZ 理論 國內 TRIZ 推廣團體將翻譯為「萃思」[ 34]。其涵義為將盲目的天馬 行空的想法及旁徵左引的思考法式及個人經驗萃練出來。即其主要的目的 是,將設計發明的手法,建構成為一套標準的作業流程。用可遵循的流程, 按部就班來完成設計,讓工程師在設計過程中,不至於沒有方向可以遵守, 或是往錯誤的方向去思考。Rantanen 則比較了以往舊的設計概念及有系統 的程序對產品創新設計-TRIZ ,如圖 3. 7 所示[ 35]。 舊方式 TRIZ 試誤法 隱藏矛盾 增加資源 妥協 靈感改進 規劃作業 顯現矛盾 運用有用資源 適當的最終解 知識改進
由於 TRIZ 是原自俄羅斯,因此 Le Shulyak、Steven Rodman 在將 TRIZ 引進美國時也遇到翻譯的問題,包括專業術語,有詞不達意的問題[ 36]。 在美國因不少人介紹 TRIZ 的狀況下,也產生 TRIZ 不同的翻譯狀況,本文 則是採用 L. Shulyak、S. Rodman 的版本為主,配合其他不同版本為輔。 幸運的是,一些重要原理的序號,英文版都維持與 G. Altshuller 俄文原 文一樣的序號,但隨著 TRIZ 系統在美國持續發展,TRIZ 系統也日益增大, 發生了英文版文新增內容,而沒有俄文版本的狀況[ 37]。 在 G. Altshuller 的構思中,TRIZ 以專利的集思廣益概念來解決工程 問題,當初的理論形成,是用於工程上的發明,但在傳到西方國家之後, 也開始有人將其運用在管理的層面,嘗試以創新方式來解決管理上的問 題,美國有人提出解決管理的問題[ 38]。如今 TRIZ 的創新已經是發展到 全面性的創新。 TRIZ 的精隨,即在對於整個結構尋求通盤創新,以 40 原理、39 參數 來有系統解決創新的問題。這種想法與早期台灣從仿冒起家,只知其然不 知其所以然,進展到如今以參考國外設計,或是自行研發,需要發揮新的 技巧,TRIZ 即為適合的工具。後面陸續介紹其相關原理及技巧。
3.3.1 Contradiction Matrix 矛盾矩陣 矛盾矩陣表為 TRIZ 中功能強大且最易於學習使用的工具,藉由 39 項 改進及惡化的系統特徵參數,再以 40 原理針對矩陣的衝突處提出解決方 式,大幅縮短解決問題的時間。改進的系統特徵參數為在設計產品時,所 要提升的議題。惡化的系統特徵參數則是在提升該議題時,相對所會遇到 的阻礙,即是矛盾。例如:改進強度時,則會重量會增加、體積變大…等。 藉由矩陣的對應出所提供 40 原理方案,來解決設計問題,而不用四處摸索, 詳附錄 A 所示[ 39]。 3.3.2 39/48 項系統特徵參數 在矛盾矩陣中的優化的參數與惡化的參數都是相同的內容,彼此間的 關係是對立的,在要改善設計的過程中,會遭遇到被惡化的因子(參數), 則可配合矩陣表中建議的設計原理來解決此對立關係。G. Altshuller 所提 出的有下列 39 項。如表 3. 1 所示。 表 3. 1 39 項矛盾參數 1. Weight of moving object 移動件的重量。
2. Weight of stationary object 靜止件的重量。 3. Length of moving object 移動件的長度。 4. Length of stationary object 靜止件的長度。 5. Area of moving object 移動件的面積。
6. Area of stationary object 靜止件的面積。 7. Volume of moving object 移動件的體積。 8. Volume of stationary object 靜止件的體積。 9. Speed 速度。
11. Tension/Pressure 張/壓力。 12. Shape 外型。
13. Stability of composition 組件穩定性。 14. Strength 強度。
15. Time of action of a moving object 移動件耐久性。 16. Time of action of a stationary object 靜止件耐久性。 17. Temperature 溫度。
18. Brightness 亮度。
19. Energy spent by a moving object 移動件耗能。 20. Energy spent by a stationary object 靜止件耗能。 21. Power 功率。 22. Loss of energy 能量損耗。 23. Loss of substance 物質損耗。 24. Loss of information 遺漏資訊。 25. Loss of time 時間浪費。 26. Amount of substance 物質數量。 27. Reliability 可靠度。 28. Accuracy of measurement 測量精度。 29. Accuracy of manufacturing 製造精度。
30. Object-affected harmful factors 外在有害因素。 31. Object-generated harmful factors 副作用。 32. Manufacturability 可製造性。 33. Convenience of use 使用便利。 34. Repairability 再維修性。 35. Adaptability 適合度。 36. Complexity of a device 裝置複雜性。 37. Complexity of control 控制複雜性。 38. Level of automation 自動化等級。 39. Capacity / Productivity 生產力。 M. Darrell 於 2003 年,於 G. Altshuller 的 39 項系統特徵參數之後, 再提出 9 項系統特徵參數,如表 3. 2 所示[ 37],其中部分可以明顯看出 是因應資訊業的發展所衍生出來項目,而這些也正是俄羅斯的弱項,及這 幾十年才蓬勃發展的項目,如下列所示。共 48 項系統特徵參數,並且搭配 了 40 原理,形成了新的 48*48 的矩陣。
表 3. 2 新增 9 項矛盾參數 40. Amount of information 資訊數量。 41. Noise 噪音。 42. Harmful emission 有害的散播。 43. Compatibility / Connectability 相容性、連結性。 44. Trainability/Operability/Controllability 訓練性、操作性、控制性。 45. Security 維安。 46. Safety / Vulnerability 安全。 47. Aesthetics / Appearance 美學、外觀。
48. Ability to Detect / Measure 可探查、測量。
3.3.3 40 Principle 40 原理 40 原理為矛盾矩陣中遇到問題時,提供解決問題的方案。最原始為俄 文,包括英文在翻譯過程中,也產生不同版本,在不同的翻譯狀況下,英 文已經有些差異。下面內容為整理不同版本而成,但以 G. Altshuller 1997 年版本為主[ 40],所舉的例子,則是參照書中所述的原理及範例,再嘗試 舉出不同例子,訓練自己創造及聯想的能力。如表 3. 3 所示。在 G. Altshuller 提出 40 原理時,也對 40 個原理下定義,讓使用者能夠更清楚 的了解其內容以及使用,而不會只針對其字面上的意義去推論,詳附錄 C。 表 3. 3 40 原理 1. Segmentation 分割。 例:模組化增加生產速率。
2. Extraction 移除 (Taking out 提煉)。 例:分離式冷氣。
3. Local quality 局部品質。 例:表面熱處理。
4. Asymmetry 非對稱性。
例:手機包含 MP3、PDA、GPS…等功能。 6. Universality 多用性。 例:飛機機翼兼做油箱。 7. Nested 堆疊 (Connection 接合)。 例:伸縮天線。 8. Counterweight(Anti-weight、Counterweitht)配重。 例:沖床以大圓盤帶動衝擊曲炳。 9. Prior Counteraction 預先抵銷。 例:砲座先向前動,減少後座力的距離。 10. Prior Action 預先動作。 例:於鑽大孔之前先鑽小導孔。
11. Beforehand Cushioning(Precaution、Cushion in Advance)預先緩衝。 例:安全氣囊。
12. Equipotentiality 等位能。 例:工廠碼頭與貨車平台同高度。
13. Inversion 逆向 (Do it in reverse 逆向、The other way round 反面)。 例:跑步機,人無位移,地面位移。
14. Spheroidality 球體化(Spheroidality curvature 球體化 曲面化)。 例:滑鼠、軌跡球。
15. Dynamics(Dynamicity)動態。 例:ABS 剎車系統。
16. Partial or excessive actions 部分或過量動作。 例:IC 顯影製程的光罩。
17. Another dimension(Transition into a new dimension)異次元。 例:自動化倉儲系統。
18. Mechanical vibration 機械震動。 例:震動送料機。
19. Periodic action 週期動作。 例:閃爍警示燈。
20. Continuity of useful action 有用的連續動作。 例:連續沖模。
21. Skipping(Rushing Though)快速跳過。 例:微小鑽頭以高轉速鑽孔。
22. Concert harm into benefit 壞變好(Blessing in disguise or turn lemons into lemonade 善意偽裝)。 例:鋁材外層氧化鋁可以保護內層的鋁不再氧化。 23. Feedback 回饋。 例:自動化設備中的感測器。 24. Intermediary (Mediator) 媒介。 例:AB 膠。 25. Self-service 自助。 例:錐形孔增加孔軸對準效率。 26. Copying 複製。
例:模擬試驗。
27. Dispose 可棄式 (Cheap short-living objects 便宜短期物)。 例:免洗餐具。
28. Mechanics substitution(Replacement of mechanical system)取代機械。 例:滾球滑鼠變為光電滑鼠。
29. Pneumatic or hydraulic constructions 氣液壓。 例:氣墊船。
30. Flexible shells and thin films(Flexible membranes or thin films)繞 性殼或薄膜。
例:玻璃與玻璃之間加膠膜為安全玻璃。 31. Porous materials 多孔材質。 例:自潤軸承。
32. Color changes(Changing the color)換色。 例:加熱變色的金爐。
33. Homogeneity 均質性。
例:Michelin Tweel 免充氣輪胎。
34. Discarding and recovering(Rejecting and regenerating parts)去除及再 生。
例:充電電池。
35. Transformation of properties 特性轉換(Parameter changes 改變參數)。 例:液態氧可以在小空間儲存大容量。
36. Phase Transition 相變更。
例:水灌入石縫,低溫時水結冰膨脹,將石頭撐開。 37. Thermal expansion 熱膨脹。
例:熱電偶。
38. Accelerated oxidation 加速氧化(Strong oxidants 強氧化劑)。 例:氧乙炔、燃料電池。
39. Inert Environment 惰性環境(Inert atmoshper 惰性氣體)。 例:電弧焊的氣體。
40. Composite Material 複合材料。 例:機械手臂牙叉。
3.4 COSMOSWorks 概論
有限元素法(Finite Element Analysis、FEA)在 1940 年代開始發展, 但由於需要依靠龐大的運算過程,在以手工計算的年代,其便利性不若以
解析的方式求解。但在電腦快速發展環境下,有限元素法越來越成熟,有 限元素法之於 CAE,圖學之於 CAD。 3.4.1 有限元素分析基本概念 有限元素分析為將一結構分成許多微小元素(element),每一元素可有 若干節點(node),而每一點可有若干自由度,如圖 3. 8 所示[ 41]。每一 個元素由力學分析求得平衡方程式,各元素之平衡方程式再以連續性 (continuity)條件連結,可得到整體結構之平衡方程式,進而可求得結構 之受負荷後之位移變形,進一步求得結構應力、應變等,以完成結構之力 學分析,如圖 3. 9 所示[ 41]。 圖 3. 8 節點自由度位移 圖 3. 9 元素應力 結合上述 2 項元素計算每個元素剛度矩陣,再求得整體結構之結構勁 度矩陣,如圖 3. 10 所示[ 41]。再代入所設定之位移限制及外力負荷條件, 最後再求解聯立方程組,以得到所有節點位移及節點外力之初始結果。
圖 3. 10 上列元素簡化後的剛度矩陣 一 般 的 有 限 元 素 分 析 軟 體 , 經 由 前 處 理 (pre-processing) 、 求 解 (solution)、後處理(post-processing)三個步驟來得到所要的解,其內容 分別如下,及流程如圖 3. 11 所示[ 41]。 前處理 • 定義元素形式。 • 定義材料性質。 • 定義元素幾何性質。 • 建構實際結構之有限元素模型分割。 求解 • 設定位移限制及外力負荷。 • 一般軟體有兩種設定方式,一是直接在節點或元素上設定位移限 制及外力負荷,一是將位移限制及外力負荷設定在所建構之幾何 模型上。 • 進行求解。
• 將分析結果進行處理。 • 分析結果為龐大的數據資料,以繪圖功能之後處理器對分析結果 作圖形顯示。 圖 3. 11 CAE 的使用流程(紅底部分為 COMOSWorks 自動設定) 在一般構造或外型較為簡單的結構以解析方式去求各種結果,用數值 方法去求解反而繁瑣,但隨著產品日益複雜,解析求解方式漸漸無法滿足 需求,再加上因電腦的進步,彌補數值方式需要龐大運算的缺點,而快速 發展起因於有限元素法的電腦輔助工程(CAE)。目前市面上有諸多電腦輔 助工程軟體,如 ANSYS、COSMOSWorks。 選定分析模組 建構幾何模型 設定分析材料性質 設定分析元素種類 設定對應元素之實體常數 選定網格化之 參數元素編號、大小 選取網格化區域進行網格 模型完成網格 施加邊界條件 設定負載狀況 選定求解方式 求解 分析結果 製作報告 是 否
3.4.2 COSMOSWorks 基本介紹 Cosmos 原本由專職於從事工程分析軟體開發的 SRAC 公司,於 1982 年 發展出來,直到 2002 年與 SolidWorks 合併,改名為 COSMOSWorks。使得 CAE 的工作中的前置作業與 3D 的實體模型整合,以避免檔案轉換過程中所 產生的瑕疵,造成工程分析過程中不必要的障礙。並沿用已被廣泛熟悉的 SolidWorks 的介面,以及大量由軟體自行判斷所要使用分析工具的模式, 及大量使用自動執行功能。使得 COSMOSWorks 較以往的 CAE 軟體有更大的 親合力,如圖 3. 12 所示[ 42](紅底白字為 COSMOSWorks)。減輕了使用者 的操作負擔,加快了分析的便利性。而此特性同樣的也在 COSMOSMotion 與 SolidWorks 的相容介面中出現。2009 年 COSMOSWorks 改名為 SolidWorks Simulation,讓使用者顧名思義的了解軟體功能。在本研究中,將配合 SolidWorks 運用到 COSMOSWorks 及 COSMOSMotion 這二套 CAE 軟體。
圖 3. 12 SolidWorks 與 COSMOSWorks 整合使用狀況 SolidWorks 3D 模型 前處理 解題器 後處理 分析結果 符合設計 完成 否 是 修改模型
第四章 功能設計 本研究的設計,將以 TRIZ 及 QFD 設計理論,針對爬梯機現況,進行功 能的設計改良,後續再進行細部規劃設計,並進行模擬及分析,流程如圖 4. 1 所示。 圖 4. 1 設計流程圖 4.1 設計分析 最佳設計為符合客戶設計,並非以最昂貴的方式來從事設計,以二次 大戰的軍備為例,美國認為在戰場上使用的武器,一定會損傷及報廢,因 QFD 規格分析及確立 TRIZ 尋求設計方案 QFD 評選適合設計 SolidWORKS 機構細部設計 COSMOSMotion 動態模擬 COSMOSWorks 工程分析 樣品機 功能測試 零件 設計 市購品 選用 電控 配線
此以裝備在戰場出任務數次後,就需要後送大修的概念來設計武器,而非 將武器設計的非常精良耐用,以增加武器生產的速度,使戰場的士兵都有 充分的火力。德國則為製造品質優良的武器,以致生產速度降低,而造成 前線士兵無足夠火力掩護,且武器也因戰火的損耗同樣也要後送大修。因 此最佳設計為設計出符合客戶所要的產品,就如同房車市場有不同價位等 級、性能等級及使用區隔,符合所設定客戶層需求的設計即為最佳設計。 爬梯機的機構,經由專利及相關產品型錄資料的歸納,種類概分為下 列幾款,除了 iBOT 4000 因價格遠高於市場需求而被淘汰外,依然活躍於 不同的市場,如表 4. 1 所示。 表 4. 1 爬梯機的種類及代表公司 支撐桿式 ATT 複合輪式 TGR、Aluweld S.A.。 履帶式 TGR。 分離滑台式 Hercules 鍊條式 Lectrotruck
全自動式 Johnson & Johnson
在了解市場上的種類之後,依據前章所述的設計理論來進行爬梯機的 設計。
4.1.1 以 QFD 設計爬梯機 爬梯機在國內的使用不普遍,因 此本研究相關功能皆國外產品的型 錄及網站,來設定客戶需求。首先以 品質屋來定義爬梯機規格,此爬梯機 因應大部份民眾容易使用的大眾化 產品,使用價格因素及省力的加權比 重較高。所展開的品質屋如表 4. 2 所示。 由於 QFD 理論的運用最主要是 在確保設計產品的品質及規格符合 表 4. 2 爬梯機的部份品質屋 客戶所需,即符合規格定義的內容,因此經驗法則還是會左右了設計概念 的成形。所以爬梯機的品質屋所展開出的技術矩陣還是追隨現有市場的導 向,所開出的產品內容與既有經驗相關及契合市場需求。 4.1.2 以 TRIZ 設計爬梯機 前一節運用品質屋中的客戶需求及技術配合一起歸納出爬梯機的設計 主軸。本節再將爬梯機想要設計的議題,及其所會遇到的障礙,從矛盾矩 陣中來挑選出適合的 40 原理,以勾勒出設計概念,程序如圖 4. 2 所示。
圖 4. 2 由矛盾矩陣中挑選 40 原理流程圖 經由上述的流程,開始選擇所要的設計原理,由於此為系統設計,所 以選擇出來的設計原理數量眾多,因此再從中篩選比較需要的改進系統特 徵參數,以及對保留下來的改進系統特徵參數,篩除影響比較小的惡化系 確認所要的規格 確認 改進系統參數 是否適用 依續確認 惡化系統參數 是否影響 跳到下一個 惡化系統參數 標示 改進系統參數與 惡化系統參數相交 的 40 原理 未確認完 惡化系統參數 確認完 惡化系統參數 完成 確認完所有 改進/惡化系統參數 跳到下一個 改進系統參數
也會有不同。篩選保留下來的改進系統特徵參數因素如下表所示: 表 4. 3 改進系統特徵參數篩選說明表 序號 特徵參數名稱 說明 1 移動件的重量 爬梯機為移動機械 11 張/壓力 承載物會產生張/壓力 13 組件穩定性 爬梯機為組合機械 21 功率 爬梯機有動力源 22 能量損耗 爬梯機有動力源 27 可靠度 確定爬梯機的使用狀況 留 下 的 特 徵 參 數 32 可製造性 確定爬梯機可以製造 10 力 與「11 張/壓力」類似而未選 14 強度 以 CAE 模擬代替 16 移動件耐久性 非量產品先暫不考慮 19 移動件耗能 與「22 能量損耗」類似而未選 29 製造精度 研究作品先暫不考慮 33 使用便利 研究作品先暫不考慮 34 再維修性 研究作品先暫不考慮 36 裝置複雜性 研究作品先暫不考慮 37 控制複雜性 研究作品先暫不考慮 未 留 下 的 特 徵 參 數 39 生產力 研究作品先暫不考慮 設計的過程中先以篩選過的改進系統特徵參數所導引出的設計原理來 進行設計構想,若無法有突破的創新設計,再擴大放寬設計原理的數量, 將原本的 39X39 矩陣,如附錄 B 所示,刪除其中無關的部份,整理後如表 4. 4 所示。此次的研究以篩選過的改進系統特徵參數就導引出適合的設計
原理來進行爬梯機設計。 表 4. 4 篩選過後的爬梯機矛盾矩陣 惡化的系統特徵參數 系統特徵參數 矛盾矩陣 1 移 動 件 的 重 量 11 張 / 壓 力 13 組 件 穩 定 性 27 可 靠 度 32 可 製 性 36 裝 置 複 雜 性 37 控 制 複 雜 性 1 移動件的重量 1, 35 19, 39 28, 29 26, 32 11 張/壓力 10, 13 19, 35 19, 1 35 13 組件穩定性 35, 19 21 功率 19, 24 26, 31 20, 19 30, 34 19, 35 16 22 能量損耗 19, 2815, 6 27 可靠度 10, 24 35, 19 改 進 的 系 統 特 徵 參 數 32 可製性 28, 29 15, 16 35, 19 1, 37 經由上表的矛盾矩陣中所整理出的發明原理中,顯示克服不同的矛盾 狀況,會有不同的解決方式,但也會有以一種發明原理,解決數種不同矛 盾。將相同部份整理裁併後,歸納出下列的原理,再過濾區分出可以運用 的原理,做為後續設計所要遵循的原理,如表 4. 5 所示。過程中,可以體 認到,TRIZ 的設計原理是一種歸納的方式,依照所要的需求整理出設計方 向,但大部分還是要靠常識及經驗去過濾不適合的設計方向。
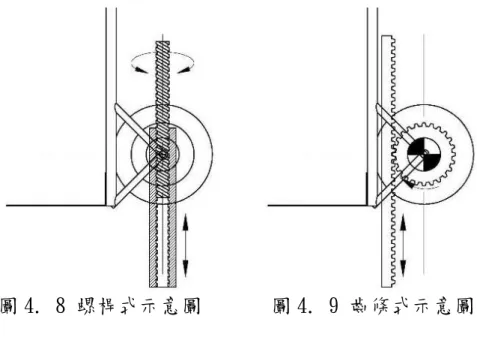
表 4. 5 TRIZ 40 原理適用比較表 可運用的原理 不適用的原理 1 分割 10 預先動作 19 週期動作 20 有用的連續動作 29 氣液壓 6 多用性 15 動態 16 部分或過量動作 24 媒介 26 複製 28 取代機械 30 繞性殼或薄膜 31 多孔材質 32 換色 34 去除及再生 35 特性轉換 37 熱膨脹 39 惰性環境 此外也發現這些原理也被市場產品所運用,而運用上也非單獨使用一 種原理,多半會結合數種原理一起使用,而這種集合各種原理的優點,也 是矛盾矩陣的精髓所在,證明 TRIZ 的矛盾矩陣及 40 發明原理可以有系統 的收集到創意的點子,表 4. 6 所示為發明原理對應於爬梯機的運用。 表 4. 6 可運用的原理 TRIZ 發明原理 運用方式 1 分割 分離式機台,廣泛的使用於超重負荷搬運機具市 場上,如圖 4. 3 所示[ 44]。 10 預先動作 可以將能量儲存於爬梯機動作的空行程上。 19 週期動作 以鍊條帶動鉤爪鉤住階梯,以上下階梯,如圖 4. 4 所示[ 45]。或驅動曲柄來帶動支撐桿,如圖 4. 5 所示,或是運用凸輪、齒條。 20 有用的連續動作 以鍊條帶動鉤爪鉤住階梯,以上下階梯,如圖 4. 4 所示;螺桿式將連續的旋轉動作改為直線動 作,圖 4. 8。 29 氣液壓 以油壓推機台的分離部份,如圖 4. 3 所示。
圖 4. 3 滑台式爬梯機 圖 4. 4 鍊條鉤爪式爬梯機 圖 4. 5 支撐式爬梯機 圖 4. 6 複合輪式爬梯機 這些原理的交互運用,可以印證於現有產品;相同的一個產品也可以 被數個設計原理印證。同時也推展出一些尚未被運用的概念,這些將要運 用的原理將於 4.1.3 節繼續展開與討論。 4.1.3 以 QFD 再設計驗證爬梯機 將 4.1.1 節所展開的品質屋,搭配 TRIZ 所引導出的設計想法及市面上 現有產品,再補充技術矩陣表 4. 7 所示。以比較各項設計的優劣。將表 4.
以了解適用性,從中選擇適合的機構。 表 4. 7 爬梯機的品質屋 表 4. 8 機構性能的比較 機構類型 功能描述 油壓缸機構 如圖 4. 3 所示,有大的輸出力,但其組合為油壓缸、動力 單元(Power Units)、電源供應組,使其機台本身就有大 的空重,適用於超荷重的場合。 氣壓缸機構 空壓缸不像油壓缸需要像動力單元、電源供應組多樣的附 加組件,但由於氣壓缸所需的高壓氣體多由空壓機 (Compressor)供應,空壓機因為其龐大的體積及重量, 以及動作時伴隨著高噪音,因此皆為固定的形式。而與空 壓機連結的氣管將限制爬梯機的行動。且氣體具有可壓縮 性,導致爬梯的行程將因為載重不同而不同。故市面上未 有空壓的爬梯機。 鍊條鉤爪式 如圖 4. 4 所示,適合於高荷重場合,但鍊條的使用有下列 缺點,需要定期上油、及衍生的油脂對環境污染問題、鍊 條會隨使用時間增加而磨耗伸長,要定期調整鍊輪中心 距,鍊條及鉤爪易磨損階梯。
複合輪式 如圖 4. 6 所示,可以讓輪胎有較久的使用時間,但缺點為 佔用空間大,動力系統要傳遞到每個輪胎,形成構造的龐 雜。 凸輪式 構造簡單,但有大空間須求,如圖 4. 7 列出了 2 種凸輪設 計各 4 個象限的狀況示意圖,可知圖中的「X」為超出允許 範圍,因此可知凸輪不適用於此產品。 導螺桿式 如圖 4. 8 所示,連續的旋轉動作轉變為直線動作。但此機 構有怕異物進入的疑慮,及螺桿導套太長有加工上的問 題,及螺牙受損即功能失效的風險。 齒條式 如圖 4. 9 所示,構造簡單、耐用。但機構有怕異物進入的 疑慮,及齒輪的齒間隙會造成振動,若改為精密齒輪或是 斜齒輪則成本激增。在一般的使用場合,因齒條的齒面凹 凸形狀,導致其在線性運動時,會有不穩定的狀況,因此 齒條為固定件。 a 型一的凸輪設計 b 型二的凸輪設計
圖 4. 8 螺桿式示意圖 圖 4. 9 齒條式示意圖 產品的優劣並非為絕對性的好壞,而是相對於產品的規格。以油壓缸 機構為例,此設計並非為不良設計,而是一開始的規格所設定要輕巧的機 構,油壓缸系統的重量多在 40 公斤以上。若是在超荷重的場合,該設計反 而是被廣泛運用,再次驗證最佳設計是符合客戶需求的這個理念。 表 4. 6 中矩陣所導引出的一項為連桿式。在所有的爬梯機構中,以支 撐桿式因為其構造精巧,因此其所佔的空間及操作範圍都比其他類型的爬 梯機構還小,適合台灣地小人稠,空間利用極致的場合,在非極大荷重的 場合容易使用,因此採用支撐桿式為此次研究的對象。 在確定使用連桿式的支撐桿的方向後,則需要對支撐桿桿進行細部設 計,此部份則還是須要依靠經驗去完成。 在動力源的選擇上,將市面上常見的形式以表 4. 9 比較,最後選擇以 馬達為動力源,此也為市面上爬梯機最廣泛使用的動力源。再搭配減速機 降低馬達的轉速,以符合爬梯機所需要的轉速[ 48]。
表 4. 9 動力源的比較 機構類型 功能描述 油壓缸機構 詳表 4. 8。 氣壓缸機構 詳表 4. 8。 馬達 氣液壓缸的最原始動力,也是以馬達帶動壓縮機及幫浦, 以產生高壓氣體及液體,來推動氣液壓缸。馬達可以算是 所有的動力源的最初始源頭。 支撐桿以連桿方式來達成動作,連桿的種類眾多,以滑動的支撐桿來 簡化聯桿機會,支撐桿的滑動方式可有下列形式: 表 4. 10 支撐桿的形式 機構類型 功能描述 中空式 圖 4. 10 所示,支撐桿中間挖空,直線往復運動導引則 在中間挖空部分。 側邊挾持式 圖 4. 11 所示,在側邊開槽,直線往復運動導引則在挾 持開槽部分。 圖 4. 10 中空式支撐桿-正視圖 圖 4. 11 側邊挾持式 支撐桿-剖視圖 此兩型皆有相同缺點:挖空部份會導致結構強度變弱,需要加大支撐
較為複雜,因此而不適用。直線軸承及滑軌[ 57]為目前市場廣泛使用的直 線運動市購品零組件,故本研究以此當作輔助桿零件。 4.2 概念設計 爬梯機構的使用範圍,包括了人員及物品的搬運。在人員的運送上, 牽涉到人員生命安全。除了我國的衛生署之外,美國的最高醫療管理機關 -健康及人類服務部(DHHS)所轄美國食品藥品監督管理局(FDA)也將其列 為醫療設備的最高等級-3 級,如表 4. 11 所示[ 47]。英國牛津大學在校 內的爬梯機也發行使用手冊[ 49],指導校內人員使用,如附錄 C,故表示 此機構最重要的還是在操作的安全性。因此本研究以貨物搬運來進行,避 免論及醫療設備涉及的人身安全,也降低在後續實驗中造成人員不必要傷 害的風險。 表 4. 11 美國政府將醫療用爬梯機構列為 3 級
設計主軸是將爬梯機構(構造示意 圖如圖 4. 12 所示[ 5])加裝於市購的 手推車上,結合後為動力輔助手動爬梯 載具[ 5],爬梯機構的動作如下。動力 來源為馬達(1)(實務使用上為直流馬 達,本研究以交流馬達代替,增加實驗 的便利性)與減速機(2)結合,以達 到所要的轉速。藉由貫穿減速機的傳動 軸(3),將動力傳到旋轉運動的主動連 桿(4),主動連桿再將動力經由被動連 圖 4. 12 爬梯機構的細部圖面 桿(5)傳到支撐桿(6),被直線軸承(7)所限制的支撐桿則進行直線運 動,爬梯機構則是藉此直線運動,將馬達的旋轉動力轉換為爬梯的動力。 於階梯上操作的狀況如圖 4. 13 所示[ 5]。本研究的爬梯機規格為配合現 實使用的狀況有下列的限制條件: 以國立交通大學工程五館為模擬對象,要克服高 160mm、深 270mm 的階梯,所以機構的爬梯往復行程必須大於 160mm。 主動連桿的長度不可超出推車的範圍,所以主動連桿的長度定為 100,其行程即可達 200mm,符合大於 160mm 的需求。 為避免支撐桿露出於手推車之外,妨礙手推車的其他操作功能。設 1 2 7 3 4 5 6
定支撐桿內縮於車體之內 5mm。 圖 4. 13 爬梯機構結合於推車的立體圖及三視圖 爬梯機構於進行爬梯動作可概分為三個階段,下階梯則反之: 階段一: 垂直升高動作。從 0°~180°時,爬梯機機構支撐桿逐漸伸 長,將手推車往高處頂起,到 180°時到達最高點,如圖 4. 14 所示。圖 a 為 45°、圖 b 為 90°、圖 c 為 135°、圖 d 為 180。 圖 a 45°狀態 圖 b 90°狀態
圖 c 135°狀態 圖 d 180 狀態 圖 4. 14 爬梯機構位於 0°~180°垂直昇高動作狀態示意圖 階段二: 在最高點時,爬梯機的輪胎已經高於下一階階梯的梯面,可 以順勢將爬梯機放置於下一階階梯的梯面。如圖 4. 15 a 圖所示。再將爬梯機傾倒,則爬梯機就爬到下一階梯,如圖 4. 15 b 圖所示。 圖 a 最高點狀態 圖 b 爬上階梯狀態 圖 4. 15 爬梯機構位於 180°時,進行爬梯動作狀態示意圖
階段三: 從 180°~0°時,爬梯機機構支撐桿逐漸縮短,最後縮到機構 的內部,如 圖 4. 16 所示,圖 a 為 225°、圖 b 為 270°、圖 c 為 315°、 圖 d 為 360°。在此階段爬梯機構為空行程。支撐桿沒有承 受任何外再負荷。藉由 TRIZ 所發明的儲存能量的功能,運 用在此階段。 圖 a 225°狀態 圖 b 270°狀態 圖 c 為 315°狀態 圖 d 為 360°狀態 圖 4. 16 爬梯機構位於 180° ~ 0°時動作狀態示意圖
第五章 工程分析及模擬 本章將以工程的角度,探討第四章以設計理論所開發的爬梯機構功能 及結構狀況,分析其工程特性。 5.1 運動學分析 爬梯機構為一動態機構,在運動狀態下的動態負荷,對結構負擔較大 於其靜態時的負擔,故先了解機構的運動狀況。以利於後續針對動態狀態 下的負荷狀況進行 CAE 分析及與靜態工程分析相互比較。 5.1.1 速度與加速度分析 在機構分析過程中,關於位移、速度、加速度的分析方式有列數種 [ 50], 圖解法 Graphical、 三角幾何法 Trigonometry、 向量迴路法 Vector Loop、 舜心法 Instant Center、 相對速度法 Relative Velocity、 相對加速度法 Relative Acceleration、
代數方式建立微分方程式[ 51][ 52],雖然在建立過程中比其他方式稍為 繁雜,但方便於往後對於不同角度的狀況分析。 爬梯機構的結構示意如圖 5. 1 所示,其相對關係如下 • D 點與階梯面接觸, • D 點與 C 點位於相同桿件上,及有相同的運動方向, • C 點與 O 點的距離變化代表爬梯功能的進行, • 支撐桿本身無進行旋轉運動。 忽略桿件的剛性問題,將其視為剛體,則 D 點的位移、速度、加速度皆與 C 點相同。 圖 5. 1 爬梯機構各部位關係示意圖 設節點 O、B、C 分別組成連桿 R、連桿 L OB R, BC L 由示意圖得關係式如下 sin sin R L ) 1 4 ( sin sin L R 1 cos sin2 2
) 2 4 ( sin 1 cos2 2 代(4-1)入(4-2) 2 2 1 sin cos L R 2 sin 1 cos L R 以二項式近似定理簡化 ) 3 4 ( sin 2 1 1 sin 1 2 2 L R L R 設 y 為 C 點與 O 點的距離,與連桿 R 及連桿 L 的關係式 cos cos L R y 設 x 為連桿端點與最大伸長點的距離

![圖 3. 6 五層 QFD 3.3 TRIZ 理論 國內 TRIZ 推廣團體將翻譯為「萃思」[ 34]。其涵義為將盲目的天馬 行空的想法及旁徵左引的思考法式及個人經驗萃練出來。即其主要的目的 是,將設計發明的手法,建構成為一套標準的作業流程。用可遵循的流程, 按部就班來完成設計,讓工程師在設計過程中,不至於沒有方向可以遵守, 或是往錯誤的方向去思考。Rantanen 則比較了以往舊的設計概念及有系統 的程序對產品創新設計-TRIZ ,如圖 3](https://thumb-ap.123doks.com/thumbv2/9libinfo/8738266.203715/40.892.144.791.102.737/手法建構成為一套標準作業流程用可遵循流程按部來完以往舊的設計.webp)