國立交通大學
土木工程學系
碩 士 論 文
CPU 平行粒子群最佳化應用於平面
桁架結構最佳化設計
Application of Particle Swarm Optimization
using CPU Parallel Processing in
Optimization Design of 2D Truss Structures
研 究 生 :洪銘澤
指導教授:洪士林 博士
中華民國 一○二年七月
CPU 平行粒子群最佳化應用於桁架結構最佳化設計
Application of Particle Swarm Optimization using CPU Parallel
Processing in Optimization Design of 2D Truss Structures
研 究 生:洪銘澤 Student:Ming-Tse Hung 指導教授:洪士林 Advisor:Dr. Shih-Lin Hung
國 立 交 通 大 學 土 木 工 程 系
碩 士 論 文 A Thesis
Submitted to Department of Civil Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master of Science
in
Civil Engineering
July 2013
Hsinchu, Taiwan, Republic of China
I
CPU 平行粒子群最佳化應用於桁架結構最佳化設計
研究生:洪銘澤 指導教授:洪士林 博士 國立交通大學土木工程學系碩士班 摘要 電腦硬體不斷進步,電腦從以前單核心到現在多核心處理器。核心時 脈上升幅度逐漸趨緩,因此使用平行運算才能妥善利用多核心處理器。粒 子群最佳化(Particle Swarm Optimization, PSO)是一個在最佳化中最常被使 用的方法之一。它是模擬群體智慧(Swarm Intelligent)的仿生演算法,先以 全域搜尋方式在搜尋範圍中蒐集資訊,搜尋結果較好的粒子趨使其他的粒 子靠近轉為局部搜尋,最後收斂到粒子群經驗中最佳解。由於平行程式適 合資料分別獨立運算,盡可能避免執行緒同步才能有更好的效能。本研究 先利用『OpenMP』平行運算矩陣乘法(Matrix Multiplication)。測試矩陣大 小與平行化效能的關係。利用粒子群最佳化演算法,粒子分別獨立搜尋個 體的特性平行運算,再分別用【30 個變數平方和】、【Beale’s Function】、 和【桁架最佳化設計】測試平行運算粒子群最佳化的效能和粒子總數的關 係和效能和迭代次數的關係,最後附上最佳化結果。本研究結果指出,粒 子群最佳化當迭代次數和總粒子數量夠多時。兩種演算法效能都可以達到 加速比 3 以上的效果。此平行運算粒子群最佳化演算法可應用於其他最佳 化案例只需更改目標函數。 關鍵字:OpenMP、平行運算、粒子群最佳化、平面桁架結構最佳化設計II
Application of Particle Swarm Optimization using CPU Parallel
Processing in Optimization Design of 2D Truss Structures
Student: Ming-Tse Hung Advisor:Dr. Shih-Lin Hung Department of Civil Engineering
College of Engineering National Chiao Tung University
Abstract
Advances in computer hardware, computers has been progressed from single-core to multi-core processors. This progress in computers provides a possibility of development in parallel computing. OpenMP, currently, is a popular API for implement parallel programs on PCs with C, C++, or
FORTRAN. Among bionic optimization algorithms, particle swarm optimization (PSO) is a most employed approach for solving optimization problem due to the characteristics of less working parameters and quick convergence rate. The algorithm has been proved capable of reach near global optimization in search space using particle itself and swarm experience in search. Since computing for each single particle is independent in searching iteration, the PSO algorithm can be paralleled in a multi-core computing platform. The objective of this study is to develop a parallel PSO algorithm in optimization design of 2D truss
structures. First, the problem of synchronization in shared memory platform for the algorithm is studied and solved. Following, a parallel matrix multiplication program with different size is developed and the computing performance related to matrix size is then assessed. Second, a parallel PSO program with OpenMP is implemented. A Sphere function with 30 dimensions and a Beale's function are utilized to verify and evaluate the correctness and the corresponding
performance. Finally, three 2D truss optimization design problems are solved using the proposed parallel PSO program. Computing results reveal that the parallel program achieves a speedup factor greater than 3.42 under a four-core computing platform with OpenMP.
Keywords: OpenMP, parallel computing, Particle swarm optimization (PSO),
III
誌謝
首先感謝我的指導老師洪士林教授,老師常在我遇到瓶頸時幫忙我, 在口試前也專門對我的簡報一頁一頁指導我修正簡報,使我受益良多,口 試時也更加順利,感謝老師兩年來的教導。感謝黃炯憲老師、林昌佑老師 和詹君治學長於百忙中撥空參加我的口試,並給我予許多寶貴意見。使我 的論文能夠更為完整,在此也謝謝各位老師的教導。 感謝詹君治學長兩年來在簡報、口頭報告、和專業知識的指導。感謝 江祥學長、勇奇學長、穎泰學長、思伶學姐、孟軒學長、宣治學長、晟佑 學長、和俊佐學長給予我幫忙與鼓勵,江祥學長特別為了我跑到學校真的 非常感謝。 感謝研究所同學子陽、錦鴻、奇霖、義洋、耀緯、明廉、冠龍、湘 銘、曉德、和京陞,在研究所的日子裡一起研究和玩樂。感謝在清大 EPL 實驗室的宇廷和他的學弟妹們在我程式出現問題時給予幫助和建議。感謝 學弟丁丁、智嵩、建文和允璿在我研究所後半日子中一起研究和玩樂。 感謝國中同學,每當我回臺北休息時一起出來打球、吃飯、和聊天, 讓我分享在研究所發生的一些有趣事情也讓我抒發課業壓力。 在研究所生活中有許多貴人的幫助才能完成論文,在此感謝所有幫助 過我的人,也希望幫助我的人往後一切順利。IV 最後將本篇論文獻給我的爸爸和媽媽,從小養育我到現在,因為有你 們的奉獻、付出、栽培和支持,才能讓我在研究所生活順順利利無後顧之 憂的完成學業,沒有你們就沒有今天的我。謝謝你們的養育之恩,我永遠 都不會忘記的。 洪銘澤 謹誌 中華民國 102 年 7 月于國立交通大學
V
目錄
摘要 ... I Abstract ... II 誌謝 ... III 目錄 ... V 表目錄 ... VIII 圖目錄 ... X 第一章 緒論 ... 1 1.1 背景與動機 ... 1 1.2 研究目的 ... 3 1.3 研究流程 ... 3 1.4 研究架構 ... 5 第二章 文獻回顧 ... 7 2.1 平行運算簡介 ... 7 2.1.1 多核心歷史發展 ... 7 2.1.2 多核心運算的發展 ... 8 2.1.3 平行程式主流架構與對應編譯語言 ... 9 2.1.4 費林分類法(Flynn's Taxonomy) ... 10 2.1.5 OpenMP 簡介 ... 11VI 2.1.6 OpenMP 平行方式 ... 12 2.2 粒子群最佳化 ... 12 第三章 研究方法 ... 16 3.1 OpenMP 程式開發... 16 3.1.1 競爭危害(Race Condition) ... 19 3.2 平行運算─粒子群最佳化 ... 19 3.3 桁架最佳化設計 ... 21 3.3.1 結構最佳化設計方法 ... 21 3.3.2 桁架結構分析 ... 23 3.4 加速比 ... 28 第四章 結果分析與探討 ... 30 4.1 平行運算矩陣乘法 ... 30 4.2 平行運算粒子群最佳化 ... 31 4.2.1 30 個變數平方和之最小值 ... 32 4.2.2 Beale's function ... 33 4.2.3 桁架斷面結構最佳化 ... 33 第五章 結論與建議 ... 37 5.1 結論 ... 37 5.2 建議 ... 38 參考文獻 ... 39
VII
附表 ... 41 附圖 ... 62
VIII
表目錄
表 1 費林分類法[17] ... 41 表 2 OpenMP Directives ... 42 表 3 矩陣乘法測試結果 ... 42 表 4 30 個變數的最小平方和最佳化執行時間與加速比 ... 43 表 5 30 個變數的最小平方和最佳化執行結果 ... 44 表 6 修改平行程式後測試 ... 45 表 7 Beale's function 粒子數與加速比關係 ... 46 表 8 10 支桿件桁架斷面最佳化結果 ... 47 表 9 10 支桿件最佳化執行時間與粒子總數關係 ... 48 表 10 10 支桿件最佳化和迭代次數關係 ... 49 表 11 10 支桿件最佳化斷面後節點位移 ... 50 表 12 10 支桿件最佳化斷面後結構分析桿件應力 ... 51 表 13 17 支桿件桁架斷面最佳化結果 ... 52 表 14 17 支桿件最佳化和粒子總數關係 ... 53 表 15 17 支桁架結構最佳化斷面後節點位移 ... 54 表 16 17 支桁架結構最佳化斷面後結構分析桿件應力 ... 55IX 表 17 26 支桁架結構桿件編號表 ... 56 表 18 26 支桁架結構最佳化和粒子總數關係 ... 57 表 19 26 支桁架結構最佳化斷面後桿件應力 ... 58 表 20 26 支桁架結構最佳化斷面後節點位移 ... 59 表 21 26 支桁架結構最佳化斷面結果 ... 60
X
圖目錄
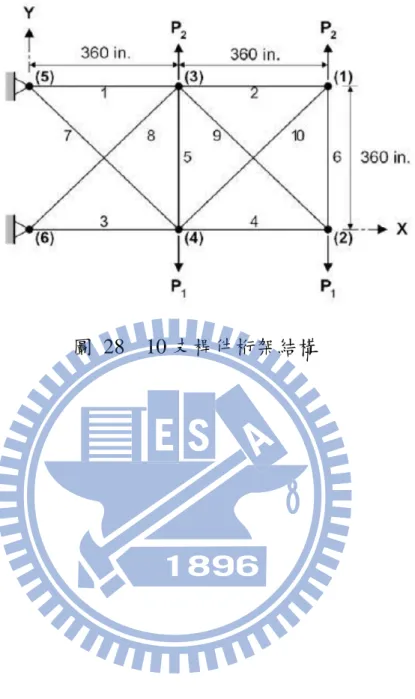
圖 1 傳統連續處理 ... 62 圖 2 平行處理 ... 62 圖 3 平行層次圖[18] ... 63 圖 4 OpenMP 發展流程圖 ... 63 圖 5 Fork/Join Model ... 64 圖 6 粒子群最佳化粒子速度和位置更新示意圖 ... 64 圖 7 粒子群最佳化流程圖 ... 65 圖 8 簡易 OpenMP 程式 ... 66 圖 9 簡易 OpenMP 程式執行結果 ... 66 圖 10 簡易 OpenMP 程式示意圖 ... 67 圖 11 矩陣乘法 ... 68 圖 12 矩陣乘法使用 OpenMP... 68 圖 13 競爭危害範例 ... 69 圖 14 競爭危害輸出結果 ... 69 圖 15 解決競爭危害 ... 70 圖 16 粒子群最佳化虛擬碼 ... 71XI 圖 17 二維桁架桿件局部座標和整體座標 ... 72 圖 18 矩陣乘法執行效能結果 ... 73 圖 19 核心數與加速比關係 ... 73 圖 20 多執行緒同時存取同一個記憶體位置 ... 74 圖 21 平行粒子群最佳化演算法 ... 76 圖 22 粒子群最佳化核心 ... 76 圖 23 30 個變數的最小平方和粒子總數與加速比關係 ... 77 圖 24 4.2.1 節最佳化收斂情形 ... 78 圖 25 Beale’s function 繪製圖形 ... 78 圖 26 Beale’s function 粒子總數與加速比關係 ... 79 圖 27 Beale’s function 收斂情形 ... 79 圖 28 10 支桿件桁架結構 ... 80 圖 29 10 支桁架加速比與粒子總數關係 ... 81 圖 30 10 支桿件桁架結構最佳化收斂過程 ... 82 圖 31 17 支桁架結構 ... 82 圖 32 17 支桁架加速比與粒子總數關係 ... 83 圖 33 17 支桿件桁架結構最佳化收斂過程 ... 83 圖 34 26 支桁架結構 ... 84
XII
圖 35 26 支桁架結構粒子總數與加速比關係 ... 84 圖 36 26 支桁架結構收斂情形 ... 85
1
第一章 緒論
1.1 背景與動機
隨著電腦的中央處理器(CPU),時脈(Hz)上升速度逐漸趨緩,然而核 心(core)已經從單核心變成多核心,甚至手機的處理器也是多核心。 在一 般在撰寫程式都以單核心做運算。如圖 1 所示,而其他核心則處於閒置 (idle)狀態,因此盡可能地將程式平行化才能將硬體有效利用,如圖 2 所 示。平行電腦架構一般分為分享記憶體(Shared Memory Multiprocessor)、 分散記憶體(Distributed Memory Multicomputer)、和混合式(Hybrid
Distributed-Shared Memory)。本研究以分享記憶體(Shared Memory Multiprocessor)為主,利用應用程式『OpenMP』開發平行程式[1]。
撰寫平行程式時必須先考量程式中哪些程序可以平行,例如矩陣相乘 因為在相乘時每個元素均是獨立的個體並不會互相影響。若沒有處理平行 程式容易造成競爭危害(race condition)或鎖死(dead locked)等情形可能造成 效能不佳,甚至造成資料錯誤。
2 平行程式最大的優點可以縮短計算時間解決問題或解決更大的問題
。
因此本研究以計算量大的最佳化(Optimization)為主,而最佳化是指在許多 限制與條件中,尋找最佳答案的過程,而最佳答案代表最好的妥協。而平 行化則可得到更好的“最好的妥協”,例如時間條件或答案限制。最佳化 在早期多以梯度做為搜尋方向,當求解極值問題有很好的效率。因此當初 始點位在全域最佳解梯度附近維持一致處可以快速搜尋到全域最佳值。反 之若位在區域最佳解附近梯度維持一致處則會掉入區域最佳解[2]。因此許 多學者為了改善傳統梯度法容易掉入區域最佳解缺點而開發出不需要利用 梯度的最佳化演算法,即非傳統最佳化演算法。其中包含:粒子群最佳化 (Particle Swarm Optimization) [7]、蟻群演算法(Ant Colony Optimization) [15]、模擬退火演算法(Simulated Annealing) [20]、調和搜尋演算法(Harmony Search) [16]、和禁制搜尋法(Tabu Search)[21],上述方法都改善 了傳統梯度搜尋法的缺點擁有更好的全域搜尋能力。
桁架結構是在土木工程常見的結構系統之一,桁架在理論中只以軸力 傳遞,因此在做結構分析時只需考慮軸力即可。在做結構分析時,桁架結 構較其他結構系統簡單。桁架最佳化一般分為三種,最佳桿件斷面尺寸設 計(Size optimization)、最佳結構配置(Configuration optimization)、和最佳拓
3 樸設計(Topology optimization)。最佳桿件斷面尺寸設計最為普遍使用[3]。
1.2 研究目的
平行程式最大的優點可以縮短計算時間解決問題或解決更大的問題。 由於粒子群最佳化在搜尋最佳解以全域搜尋需要大量的迭代次數和大量的 粒子數增加其搜尋能力,因此粒子群最佳化耗費大量的計算資源。 本研究目的希望利用現今平行運算技術(OpenMP)及硬體架構發展一套 有效的演算法。粒子群最佳化中粒子分別獨立之特性將此最佳化程式中計 算粒子適應性函數時平行化減少計算時間。最佳化測試案例分別有: minF(x0, x1, …, x29, x30)= x02+x12+…x292+x302 桁架斷面最佳化1.3 研究流程
本研究使用 OpenMP 平行處理粒子群最佳化桿件斷面尺寸設計 流程一共分為以下步驟:4 第一步驟: 蒐集粒子群最佳化相關文獻並且了解粒子群最佳化理論和搜尋最佳化 方法。蒐集 OpenMP 相關教學自我學習。了解多執行緒運作方式和如 何使用共享記憶體。 第二步驟: 參考網路教學文章編寫平行程式矩陣乘法,並且計算運算時間得到程 式加速比。 第三步驟: 參考文獻[7]編寫粒子群最佳化程式。利用簡單數學最佳化方程式驗證 演算法是否正確。 第四步驟: 編寫結構分析程式。桁架結構桿件應力和節點位移作為設計依據。 第五步驟: 將第三步驟和第四步驟兩程式結合。第四步驟為目標函數並且當不符 合設計限制時增加懲罰函數,分析結束後回傳桁架結構總重。 第六步驟: 將 OpenMP 指令加入第五步驟程式中,並且增加計算所需資料副本, 確保多執行緒可以同時運算。
5 第七步驟: 改變粒子總數、迭代次數、和不同目標函數分別計算程式加速比。 第八步驟: 平行粒子群最佳化程式開發完成,並提出建議與未來展望。
1.4 研究架構
本研究論文共分五個章節: 第一章緒論:說明研究背景、動機、目的、和研究流程。 第二章文獻回顧:首先介紹多核心架構和歷史,架構所對應的編譯語 言;費林分類法(Flynn's Taxonomy)分別介紹 SISD、SIMD、MISD、和 MIMD 四種高效能電腦的分類方式。『OpenMP』的起源並且簡單介紹其編 寫方式,如何使用『OpenMP』控制多執行緒達成平行運算;簡單介紹粒 子群最佳化歷史和理論。 第三章研究方法:更深入介紹使用『OpenMP』編寫平行程式,並且 利用自身發現的錯誤情形介紹平行程式編寫時常發生競爭危害(Race Condition)。實際將粒子群最佳化演算法說明,並且提出應該平行化的演算 法區段;介紹桁架結構分析和最佳化的目標函數和限制條件。 第四章結果分析與探討:先利用一般人熟悉矩陣乘法,實際測試平行6
化結果。粒子群最佳化的平行運算。先說明平行化演算法流程,利用【30 個變數平方和之最小值】和【桁架斷面結構最佳化】測試平行化效果。
第五章結論與建議:為整篇論問下結論並且提出未來可以繼續發展的 目標。
7
第二章 文獻回顧
2.1 平行運算簡介
2.1.1 多核心歷史發展
傳統電腦軟體以串行計算(serial computation)方式撰寫,一個指令執行 完成才能執行下一個指令[1]。平行計算一般是指許多指令得以同時進行的 計算模式。在同時進行的前提下,可以將計算的過程分解成小部份,之後 以平行方式來加以解決[4]。平行運算早在二十世紀 60 年代美國就有平行 計算機之後 70、和 90 年代皆有平行計算機的蹤跡。過去處理器依莫爾定 律[5]所述,每十八個月增加一倍的電晶體數逐漸遞增。處理器時脈增加的 速度超越建構平行電腦和編譯平行程式的時間,使得平行電腦架構與編譯 平行程式效益有限且很快地就因處理器時脈增加而被取代。 近年處理器逐漸從單晶片單核心到單晶片多核心發展。因電路設計的 物理極限、散熱、和漏電(這裡的漏電指高製程晶片於運作時,部分電子因 量子穿隧效應而由非電路或電路元件的矽中穿過)等原因使得處理器往單晶 片多核心發展,在 2005 年多核心架構開始量產銷售。多核心處理器的出 現讓平行運算有更好的效益,軟體逐漸開始配合硬體而往平行運算發展。8 平行運算效益提高後各領域開始運用於科學計算包括奈米科學、工程 計算、模擬爆破、氣象、醫學影像、流體力學、模擬粒子碰撞、石油探 勘、和材料科學等應用。一般應用於影音轉檔、影音播放、遊戲物理效 果、解壓縮工具、繪圖工具、和瀏覽器等。現今的平行運算已經不再侷限 於某些程式,越來越多日常用到的應用程式漸漸以平行運算增加其效能。
2.1.2 多核心運算的發展
平行運算是一個廣義的概念,根據平行架構不同一般可分為以下幾種 方式。如圖 3 所示最微觀的平行運算是單核心指令平行(ILP-Instruction Level Parallelism),使用單處理器的執行單元同時執行多條指令。多核心平 行(Muti-Core Parallel)即在單晶片擁有多個核心,也就是將執行緒平行 (TLP-Thread Level Parallelism)。多處理器平行(Multi-Processor Parallel),即 安裝多個處理器在同一機器上,以執行緒與處理過程(process)等級的平 行。最後藉由網路連結多台電腦實現叢集(Cluster)或分散式(Distributed)平 行。隨著平行架構的發展,平行演算法(Parallel Algorithm)也不斷成熟,歷 史上平行演算法研究集中於二十世紀七八十年代。這段時間出現許多不同
9
互連架構和記憶體模式的 SIMD(Single Instruction Multiple Data)計算機,到 了二十世紀九十年代中期,平行演算法更精進其設計與分析也兼顧平行電 腦架構與軟體上設計。
2.1.3 平行程式主流架構與對應編譯語言
單晶片多核心:
2005 年起 Intel 與 AMD 兩大 CPU 製造商正式量產銷售雙核心處理 器,2007 年與 2009 年又分別推出四核心與八核心處理器,共享記憶體 (Shared Memory)的架構已經廣泛使用。開發者也開始發展多執行緒編程, 利用多執行緒編程即可在多個核心使執行緒平行充分利用 CPU 的運算能 力。多執行緒編程除了能利用作業系統本身提供 API,還可利用一些函式 庫或語言擴充等實現多執行平行運算,而一般常見的是 intel 所發展的 OpenMP。 超級電腦、叢集和分散式運算 超級電腦是指效能在世界排名非常優異的電腦可以處理大量資料和高 速運算,如美國 ORNL 實驗室的『泰坦(Titan)』、美國 IBM 的『Blue Gene/Q』、和日本 Fujitsu 的『京』。基本組成元件與個人電腦的概念無太大 差異,但規格及效能較為強大,例如『泰坦(Titan)』的計算效能高達 17.59
10
Peta-FLOPS。計算機叢集簡稱叢集,它是透過一組鬆散整合的電腦軟體和 硬體連起來高密度合作運算工作。叢集中每一台計算機稱作節點,通常利 用區域網路連結。叢集在性能價格比上較超級電腦優異,目前超級電腦、 叢集與分散式計算常用的開發工具是 MPI(Message Passing Interface)。
2.1.4 費林分類法(Flynn's Taxonomy)
費林分類法是一種高效能電腦的分類方式。1972 年費林(Michael J. Flynn)根據資料流(Information Stream),分成指令(Instruction)和資料(Data) 兩種,據此又可分為以下四種(表 1):
單一指令流單一資料流,Single Instruction Single Data(SISD)。傳統計 算機單 CPU 在同一時間只能執行一條指令處理一筆資料,即一個控制 流和一個資料流順序執行。
單一指令流多資料流,Single Instruction Multiple Data(SIMD)。一個指 令同時處理多個資料,即一個控制流多個資料流。
多指令流單一資料流,Multiple Instruction Single Data(MISD)。此系統 結構只適用特定演算法,各處理器排成線性陣列,對應同一資料流並 執行不同指令。
11
多指令流多資料流, Multiple Instruction Multiple Data(MIMD)。一般超 級電腦或伺服器大多採用 MIMD 架構,多處理器處理不同指令流。
2.1.5 OpenMP 簡介
90 年代初期,提供共享記憶體(Shared Memory)的供應商提供利用 Fortran 以指令為基礎的擴充物件,使用者只需要增加指令在要平行的迴圈 中即可。然而在 1994 年美國國家標準局 ANSI(American National Standards Institute) X3H5 第一次嘗試標準化 OpenMP,但分散式記憶體架構當時正 流行因此未通過。1997 年 OpenMP 才制定標準化,至今持續在發展如圖 4[6]。
OpenMP(Open specification for Multi-Processing)是一個應用程式介面 (API),用於控制多執行緒(multi-thread)和共享記憶體(shared memory)平行 化。主要包含三個應用程式介面[6]:
Compiler Directive
Runtime Library Routines Environment Variables
12 多核心電腦已經非常普遍,但是傳統循序程式只能以單核心運作並無法發 揮多核心的效能。將傳統循序程式由單一執行緒改寫為多執行緒才能發揮 多核心的效能。撰寫多執行緒程式有很多種方法,除了利用作業系統本身 提供 API 之外使用 OpenMP 是不錯的選擇。若只是簡單平行迴圈,程式設 計師只需要將欲平行的區段加上 OpenMP 的指令即可將原本單執行緒的程 式轉為多執行緒,效能也就大幅上升。程式設計師須注意程式的邏輯是否 符合多執行緒,並且再適當時候做修正,並免造成競爭危害(Race Condition)、死結(Deadlock)。
2.1.6 OpenMP 平行方式
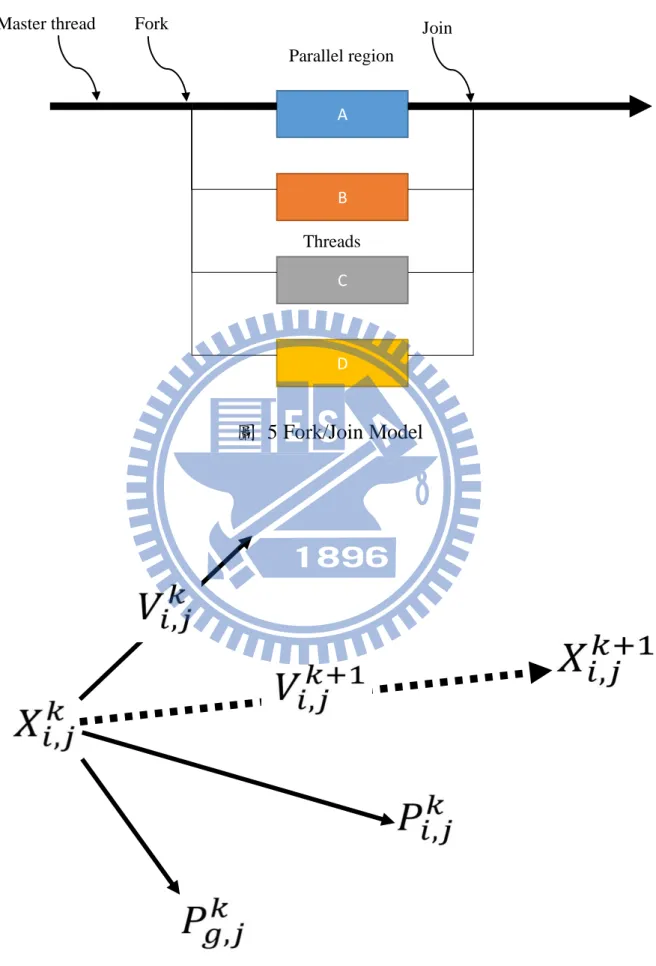
OpenMP 是以 Compiler Directive 為基礎,編譯器負責處理執行緒 fork/ join 如圖 5 和分配任務給執行緒。共用記憶體架構配置方式一般分為動態 和靜態主執行緒(master thread)在平行區域(Parallel region)前『fork』啟動其 他執行緒(threads),主執行緒再『join』等待所有執行緒執行完畢,之後主 執行緒繼續以單執行緒方式執行。
2.2 粒子群最佳化
1995 年 Eberhart 和 Kennedy 提出粒子群最佳化(Particle Swarm
Optimization, PSO),它是一種具有群體智慧概念的演算法。粒子群最佳化 起初因為兩學者 Eberhart 和 Kennedy 觀察鳥類覓食行為所得到靈感。將此
13 現象模擬成一套最佳化演算法,建立每個個體之間的互動規則產生群體行 為而得到最佳化的目標[7]。 粒子群最佳化主要概念是假設有一群鳥在一個空間內尋找食物。初始 並不知道最佳覓食位置在何處,所以每隻鳥則憑著各自經驗或直覺尋找地 點,直到牠們覺得較佳的位置覓食。當某些鳥發現更好的覓食地點而去覓 食,其他鳥就會收到訊息而往更好的地點前進覓食[8]。 粒子群最佳化演算法的模擬理論中,將『粒子(particle)』定義為解空間 中的一隻鳥,而每個粒子其中都應包含: 位置(position) 速度(velocity) 個體經歷過最佳目標函數值(pbest) 群體經歷過最佳目標函數值(gbest) 每個粒子所在『位置』都是最佳化問題的解,每個解都對應一個答案 稱之為『目標函數值(Objective function value)』或稱『適應值(Fitness
14 value)』[7]。粒子透過自己的『位置』、『pbest』、和『gbest』作為更新『速 度』的依據。再將粒子原『位置』加上『速度』得到新的『位置』,計算 新的『目標函數值』並與『pbest』比較。若較好則取代先前『pbest』,反 之粒子回到原來『位置』。當所有粒子都更新完後,比較所有粒子『目標 函數值』後,最好的粒子則為『gbest』,利用這樣的動作在解空間內反覆 迭代搜尋最佳解。將以上最佳化方式利用數學式表達,假設一總粒子數 M、維度 N 個的最佳化問題,則『速度』與『位置』的更新如(式 1)和(式 2) 𝑉𝑖,𝑗𝑘+1 = 𝑉𝑖,𝑗𝑘 + 𝑐1𝑟1(𝑃𝑖,𝑗𝑘 − 𝑋𝑖,𝑗𝑘 ) + 𝑐2𝑟2(𝑃𝑔,𝑗𝑘 − 𝑋𝑖,𝑗𝑘 ) (1) 𝑋𝑖,𝑗𝑘+1 = 𝑋𝑖,𝑗𝑘 + 𝑉𝑖,𝑗𝑘+1 (2) 其中: 𝑖: 從 1 到 M 的整數 𝑗: 從 1 到 N 的整數 𝑘: 迭代次數 𝑉𝑖,𝑗𝑘: 第𝑖個粒子中第𝑗個維度的速度向量 𝑋𝑖,𝑗𝑘 : 第𝑖個粒子中第𝑗個維度的位置向量
15 𝑃𝑖,𝑗𝑘 : 第𝑖個粒子中第𝑗個維度經歷過的最佳位置向量 𝑃𝑔,𝑗𝑘 : 所有粒子經歷過第𝑗個維度經歷過的最佳位置向量 𝑐1、𝑐2: 學習因子 𝑟1、𝑟2: [0, 1]之間的隨機均勻亂數 學習因子𝑐1和𝑐2代表粒子移動趨勢之權重分別往每個粒子各自的最佳 解和所有粒子的最佳解。當學習因子偏低代表粒子往目前各自最佳解和群 體最佳解的趨勢較弱。利用前一次的速度向量徘徊搜尋,這個方式增加搜 尋全域最佳解的機率,然而會增加最佳化的計算量與時間。相反的學習因 子偏高代表粒子往前各自最佳解和群體最佳解的趨勢較強。可以減少粒子 在搜尋區域中徘徊減少計算量與迭代次數,因此收歛速度較快,但也降低 搜尋全域最佳解的機率。根據文獻[7]和[9]建議將學習因子設為常數 2 最適 合。利用向量概念粒子的速度和位置更新如圖 6 所示。
16
第三章 研究方法
3.1 OpenMP 程式開發
『OpenMP』使用 Compiler Directive 的方式讓開發者撰寫平行程式, 而非以函式庫的方式提供。開發者可以在 C/C++或 Fortran 的程式碼中加 入 Compiler Directive。將程式可平行部分標示 Parallel region,分享變數標 示 shared,獨立變數標示 private,或是分配資料方式等。修改完成後,將 帶有 Compiler Directive 的程式碼交由支援『OpenMP』的編譯器進行編譯 即為平行程式。[10]
因為『OpenMP』利用 Compiler Directive 的格式設計。若使用不支援 『OpenMP』的編譯器去編譯包含 OpenMP Directive 編譯器將自動忽略產 生原本循序程式,也可能因為編寫平行程式方式與循序程式不同造成資料 錯誤或效能不佳。
本研究使用 C/C++編寫程式,OpenMP Directive 在 C/C++格式如表 2 所示 範例:
#pragma omp parallel default(None) private(x, y)
每個 OpenMP Directive 的開頭都是 #pragma omp,緊接著 Directive 指 令將原本循序程式以多執行緒執行。
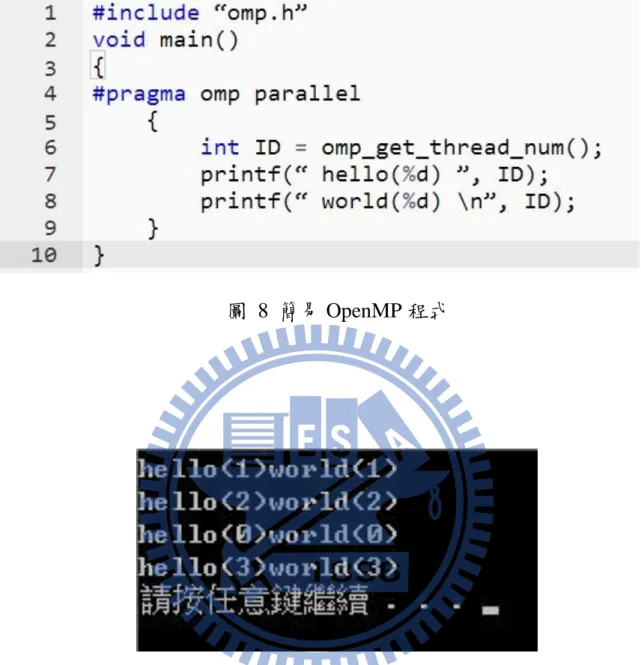
17 撰寫『OpenMP』平行程式與傳統循序程式不盡相同,因此首先必須 瞭解執行緒(threads)的概念,以 C/C++為例利用簡單的程式做說明,如圖 6 所示, 第 1 行: 首先 C/C++程式必須載入『OpenMP』標頭檔,才能使用 OpenMP Directive、Runtime Library Routines、Environment Variables。 第 4 行:
標示 parallel region,parallel region 範圍內以多執行緒執行,此處未指 定執行緒數量則以預設值為準。
第 6 行:
使用『OpenMP』中的 Runtime Library Routines,使用 omp_get_thread_num()回傳目前使用的執行緒 ID。 第 10 行: 結束 parallel region,此『}』後,程式循序執行。 執行結果如圖 7 可知在 parallel region 中每個執行緒都會執行一次 parallel region 中的程式如圖 8,且並非按照執行緒編號執行,而是先執行 完畢先輸出。因此在編寫平行程式時必須非常小心避免造成競爭危害(race
18
condition)。
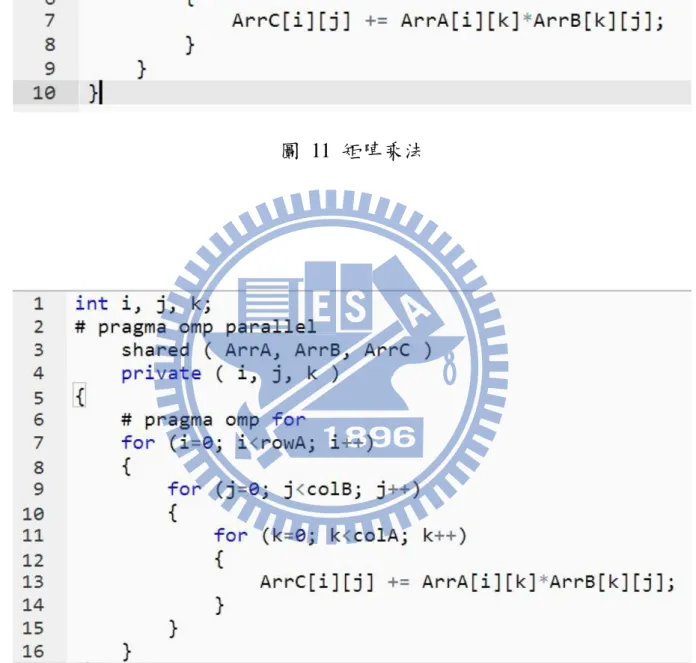
了解執行緒的基本概念後利用矩陣乘法深入說明平行程式中那些變數 可以分享(shared)那些需要私有(private)。一般循序編寫矩陣乘法如圖 9, 其中矩陣 ArrA 和 ArrB 為已知數值。rowA 和 colB 為矩陣 ArrA 的列數 和行數,colB 為矩陣 ArrB 的行數,經由三層槽狀迴圈執行矩陣乘法, 存到矩陣 ArrC。使用『OpenMP』編寫平行運算矩陣乘法如圖 10, 第 2 行:
標示 parallel region,parallel region 範圍內以多執行緒執行,『OpenMP』預 設變數為分享(shared)為預設值,default(none)將變數透過手動設定。 第 3 行:
將 ArrA, ArrB, 和 ArrC 三個變數設為共享(shared),執行緒可以同時存取 因此達到平行運算的效果。
第 4 行:
將槽狀迴圈內 i, j, k 三個變數設為私有(private)。避免多個執行緒修 改,使每個 for 迴圈徹底執行完畢,否則造成會競爭危害(race condition), 使矩陣乘法錯誤。
19
# pragma omp for 為 OpenMP Directive 即告訴 compiler 此 for 迴 圈以多執行緒執行。 比較圖 9 和圖 10 可以發現利用『OpenMP』將 for 迴圈以多執行緒執 行非常容易僅需要增加一行指令,而迴圈內變數應共享(shared)或私有 (private),才是編寫『OpenMP』平行程式最重要的問題之一。
3.1.1 競爭危害(Race Condition)
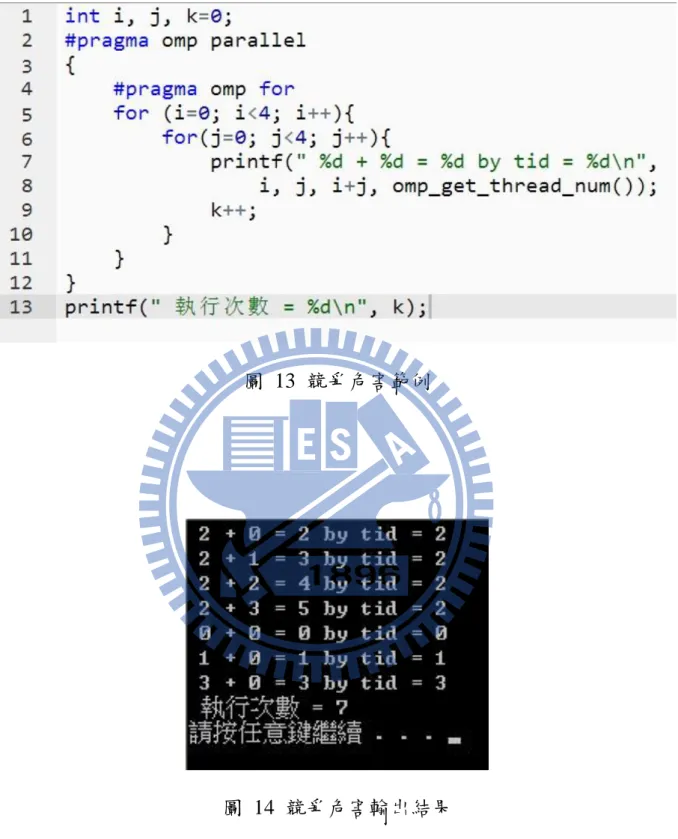
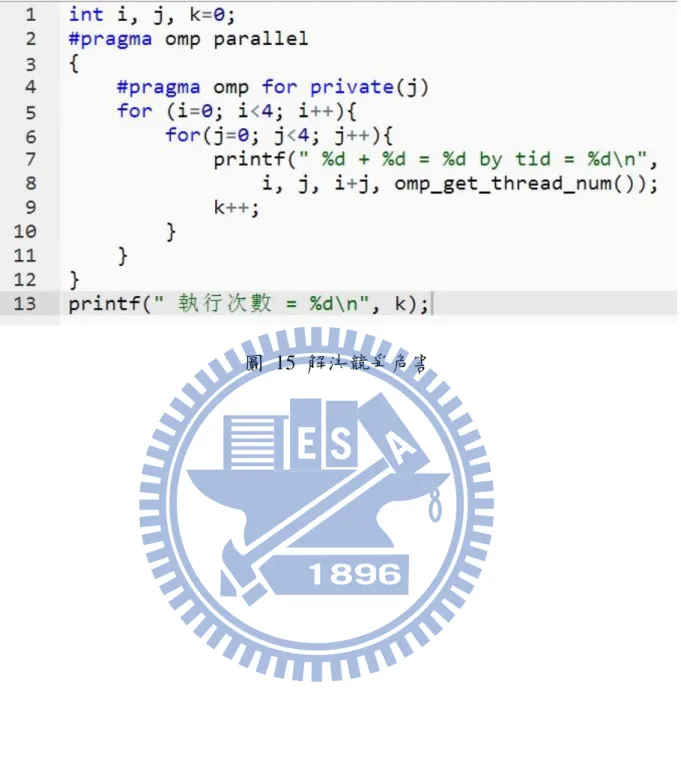
利用一個簡單的程式來解釋造成競爭危害(race condition)的原因如圖 11,明顯看出這是兩個 for 迴圈中包一個加法。理論上此加法應執行十六 次。輸出結果如圖 12,令人意外的是加法執行次數僅七次,且經多次執行 此程式加法執行次數都不盡相同。造成此現象主要原因在於『OpenMP』 會將在 parallel region 外的變數預設為共享(shared)變數。因此所有執行緒 同時修改到相同的 j,導致執行次數比預期中得少。改善此情形需要將變 數 j 設為私有(private)如圖 13 即可讓程式如預期執行十六次加法。3.2 平行運算─粒子群最佳化
粒子群最佳化流程圖如圖 7,利用向量的概念讓粒子朝著最佳解搜 尋。由圖 7、(式 1)、和(式 2)可知粒子更新位置和速度僅與粒子本身慣性
20 速度𝑉𝑖,𝑗𝑘、個別經歷最佳位置𝑃𝑖,𝑗𝑘、和群體經歷最佳位置𝑃𝑔,𝑗𝑘 有關。因此每個 粒子之間分別獨立並不會相互交換資料,正好符合平行運算的特性。 本研究利用『OpenMP』將粒子群最佳化以多執行緒達到平行運算效 果。編寫時開始與循序程式大致相同以單執行緒的方式分別初始化粒子速 度𝑉𝑖,𝑗0、位置𝑋𝑖,𝑗0 、個別經歷最佳位置𝑃𝑖,𝑗0、族群經歷最佳位置𝑃𝑔,𝑗0 ,循序程 式運作如圖 16 執行,可與流程圖(圖 7)對照參考,其中 第 8 行: 𝑓(𝑃𝑔0): 族群經歷最佳值 𝑓(𝑋𝑖0): 粒子𝑖的目標函數值 第 11 行: 進入迭代,開始搜尋最佳解 第 19-22 行: 更新粒子𝑖最佳位置𝑃𝑖,𝑗𝑘+1 第 24-27 行: 更新族群最佳位置𝑃𝑔,𝑗𝑘+1 第 28、29 行: 紀錄迭代次數;判斷是否結束迭代
21 當 do-while 迴圈符合停止條件時即得到最佳解𝑃𝑔,𝑗𝑘 。 由圖 16 可知程式中 do-while 迴圈消耗最多運算資源,原因在於粒子 群最佳化需要大量的迭代次數才能得到可接受的最佳解。本研究專注於 do-while 迴圈中平行運算。首先必須將已知資料複製四份到記憶體中後, 將圖 16 第 13 行中【粒子總數】分為四等分。利用『OpenMP』complier directives,由執行緒 0 到 3 共四個執行緒分別執行第 14 行到第 22 行。在 第 23 行離開 parallel region 即『OpenMP』中 join,以主執行緒來尋找此次 迭代中最佳解位置𝑃𝑔,𝑗𝑘+1,反覆迭代後得到最佳解𝑃𝑔,𝑗𝑘 。
3.3 桁架最佳化設計
3.3.1 結構最佳化設計方法
傳統上工程設計必須由有合格證照的工程師依照規範和其他相關規 定,再配合工程師利用專業知識、工程經驗累積、和客戶方的需求設計。 設計必須符合所有限制條件,即為一個可行設計。工程設計大多有多種或 無線多種可行設計。在多種可行設計中利用有效的搜尋方法,尋找一個最 佳或最適合的設計方案,就是最佳化設計。 桁架最佳化設計早在西元 1904 年由 Michell 等人[11],文獻中提出桁22 架結構最佳化設計,一般結構最佳化設計分為三類, 最佳桿件斷面尺寸設計(Size optimization): 主要改變結構中桿件的斷面大小,並且符合相關規範和其他規 定,稱為最佳桿件斷面尺寸設計。 最佳結構配置(Configuration optimization): 主要改變結構中節點位置。 最佳拓樸設計(Topology optimization): 主要改變結構中材料分配、節點、和桿件數目。 而最佳桿件斷面尺寸設計於 1974 年 Schmit[12]提出成為三種最佳化設 計方法中最早發展的。 三種結構最佳化方法中,以最佳桿件斷面尺寸設計最為普遍,此方法 針對已知結構物桿件配置。在符合應力限制、位移限制、和變形限制下, 改變桿件斷面尺寸,達到最小總重量或最低成本等設計目標。本研究專注 於最小總重量,桿件所受應力應限制於最大材料容許應力內,各自由度位 移限制在最大位移限制內。 假設一桁架結構物由𝑠個桿件所組成,自由度為𝑡個則目標函數和限制 函數分別表示為(式 3)、(式 4)、和(式 5)。
23 目標函數: min 𝐶𝑆𝑚<𝐴𝑖<𝐶𝑆𝑀 𝑓(𝐴) = ∑𝑠𝑖=1𝜌𝑖𝐴𝑖𝐿𝑖 (3) 限制函數: σ𝑖 ≤ σ𝑖,𝑎𝑙𝑙𝑜𝑤, 𝑖 = 1, 2, … , 𝑠 (4) Δ𝑗 ≤ Δ𝑗,𝑎𝑙𝑙𝑜𝑤, 𝑗 = 1, 2, … , 𝑡 (5) 其中: 𝐶𝑆𝑚:設計斷面下界 𝐶𝑆𝑀:設計斷面上界 𝐴𝑖:第𝑖根桿件的斷面積 𝜌𝑖:第𝑖根桿件的密度 𝐿𝑖:第𝑖根桿件的長度 σ𝑖:第𝑖根桿件所受應力 σ𝑖,𝑎𝑙𝑙𝑜𝑤:第𝑖根桿件最大容許應力 Δ𝑗:第𝑗個自由度的位移 Δ𝑗,𝑎𝑙𝑙𝑜𝑤:第𝑗個自由度的最大容許位移
3.3.2 桁架結構分析
桁架結構分析採用直接進度法分析桁架結構整體勁度、節點位移、桿24 件應力、和支承反力,分析步驟如下 由材料力學可知桿件內力與節點位移關係 𝑄 = 𝑘𝑢 (6) 由圖 17,將(式 6)展開成 [ 𝑄1 𝑄2 𝑄3 𝑄4 ] = 𝐸𝐴 𝐿 [ 1 0 −1 0 0 0 0 0 −1 0 1 0 0 0 0 0 ] [ 𝑢1 𝑢2 𝑢3 𝑢4 ] (7) 其中: 𝑄1− 𝑄4:局部座標中的內力 𝑢1− 𝑢4:局被座標中的變形 𝐸:桿件材料的楊氏係數 𝐴:桿件斷面積 𝐿:桿件長度 由圖 17,利用平面座標轉換概念,局部座標和整體座標互相轉換關係如 (式 8)和(式 9)所示 [ 𝑄1 𝑄2 𝑄3 𝑄4 ] = [ cos 𝜃 −sin 𝜃 0 0 sin 𝜃 cos 𝜃 0 0 0 0 cos 𝜃 −sin 𝜃 0 0 sin 𝜃 cos 𝜃 ] [ 𝐹1 𝐹2 𝐹3 𝐹4 ] (8)
25 [ 𝐹1 𝐹2 𝐹3 𝐹4 ] = [ cos 𝜃 sin 𝜃 0 0 −sin 𝜃 cos 𝜃 0 0 0 0 cos 𝜃 sin 𝜃 0 0 − sin 𝜃 cos 𝜃 ] [ 𝑄1 𝑄2 𝑄3 𝑄4 ] (9) 其中: 𝐹1− 𝐹4:整體座標中的內力 如(式 8)所示我們定義座標轉換矩陣𝑇 𝑇 = [ cos 𝜃 −sin 𝜃 0 0 sin 𝜃 cos 𝜃 0 0 0 0 cos 𝜃 −sin 𝜃 0 0 sin 𝜃 cos 𝜃 ] (10) (式 8) (式 9)可知 𝑇𝑇 = 𝑇−1 (11) 因此局部座標和整體座標中位移轉換關係 𝑢 = 𝑇𝑣 (12) 將(式 12)帶入(式 6)得 𝑄 = 𝑘𝑇𝑣 (13) 由(式 8)和(式 10)得 𝑄 = 𝑇𝐹 (14) 由(式 13)𝑄 = 𝑇𝐹 (14)(式 14)得 𝑘𝑇𝑣 = 𝑇𝐹 (15)
26 (式 15)左右式互換且同乘𝑇−1,再由(式 11)得 𝐹 = 𝑇−1𝑘𝑇𝑣 = 𝑇𝑇𝑘𝑇𝑣 = 𝐾𝑣 (16) 𝐾 = 𝑇𝑇𝑘𝑇 = 𝐸𝐴 𝐿 [
cos2𝜃 sin 𝜃 cos 𝜃 sin 𝜃 cos 𝜃 sin2𝜃
− cos2𝜃 −sin 𝜃 cos 𝜃 −sin 𝜃 cos 𝜃 − sin2𝜃 −cos2𝜃 − sin 𝜃 cos 𝜃
−sin 𝜃 cos 𝜃 −sin2𝜃
cos2𝜃 sin 𝜃 cos 𝜃 sin 𝜃 cos 𝜃 sin2𝜃
] (17) 其中𝐾為一支桿件在整體座標中的勁度矩陣,將每支桿件𝐾依相同自由度編 號相加,即可得到桁架結構整體座標中的勁度矩陣𝑆 𝑆 = [ 𝐾1 1 ⋯ 𝐾1 𝑡 ⋮ ⋱ ⋮ 𝐾𝑡 1 ⋯ 𝐾𝑡 𝑡 ] 𝑡×𝑡 (18) 其中: 𝑆:完整結構在整體座標下之勁度矩陣 𝑡:自由度總數 將節點受力𝑃和位移 d 配合矩陣𝑆自由度順序排列 𝑃 = 𝑆𝑑 (19) 𝑃 = [ 𝑃1 ⋮ 𝑃𝑡 ] (20) 𝑑 = [ 𝑑1 ⋮ 𝑑𝑡 ] (21)
27 其中: 𝑃:所有節點受力矩陣 𝑑:所有節點位移矩陣 𝑡:自由度總數 將(式 19)分為 [𝑃𝑓 𝑃𝑠] = [ 𝑆𝑓 𝑓 𝑆𝑓 𝑠 𝑆𝑠 𝑓 𝑆𝑠 𝑠] [ 𝑑𝑓 𝑑𝑠] (22) 其中: 𝑓:外力點 𝑠:反力點 將(式 22)利用矩陣乘法展開 𝑃𝑓 = 𝑆𝑓 𝑓𝑑𝑓 + 𝑆𝑓 𝑠𝑑𝑠 (23) 𝑃𝑠 = 𝑆𝑠 𝑓𝑑𝑓 + 𝑆𝑠 𝑠𝑑𝑠 (24) 已知反力點為支承,理論上並無位移(𝑑𝑠為零矩陣),因此(式 23)和(式 24) 可簡化為 𝑃𝑓 = 𝑆𝑓 𝑓𝑑𝑓 (25) 𝑃𝑠 = 𝑆𝑠 𝑓𝑑𝑓 (26) 將(式 25)左右式同乘𝑆𝑓 𝑓−1可得節點位移 𝑑𝑓 = 𝑆𝑓 𝑓−1𝑃𝑓 (27)
28 利用節點位移再將(式 16)代入(式 14)可得桿件內力 𝑄 = 𝑇𝐾𝑣 (28) 求得桿件內力後透過已知斷面積求得桿件應力
𝜎 =
𝑄 𝐴 (29) 利用(式 27)和(式 29)得到節點位移和桿件應力,即可與最大容許位移和最 大容許應力做比較,檢查該結構物是否符合設計限制條件。3.4 加速比
在平行運算領域中,加速比(Speedup Factor)用於表示當平行演算法與 相對應的循序演算法,互相比較下速度快多少。 程式加速比:𝑆(𝑝) =
𝑇𝑆 𝑇𝑝 (30) 其中: 𝑇𝑆:最好的循序演算法的執行時間 𝑇𝑝:使用𝑝個處理器的執行時間 效能提升有三種情形如圖 19 分為理論值、一般情形、和超線性。理 論值代表加速比與核心成斜率為 1 的情形,也就是說假設 4 核心的 CPU 的加速比理論值就是 4。超線性只有在某些情形會發生,例如當程式有特29
別為平行運算最佳化或有額外的硬體支援例如記憶體或快取。本研究因無 【最好的循序演算法】作為𝑇𝑆。因此定義𝑇𝑆為單執行緒執行所耗時間,來 計算加速比。
30
第四章 結果分析與探討
本研究分別利用矩陣乘法和粒子群最佳化分別利用『OpenMP』平行運算 做為測試範例。其中粒子群最佳化包括【30 個變數平方和之最小值】它是 benchmark 題目之一、【Beale’s function】和【桁架斷面結構最佳化】,以上 測試環境皆是在同一個平台下,詳細測試環境如下:
中央處理器:intel i5-2400 (6M Cache, up to 3.40 GHz) 四核心 記憶體:8 GB
作業系統:Windows 7 ultimate, 64bit 開發平台:Visual Studio 2012
4.1 平行運算矩陣乘法
編寫循序矩陣乘法如圖 11 即可,編寫開始先建立三個相同大小矩陣 空間分別為 ArrA, ArrB, ArrC, 和 ArrD。將 ArrA 和 ArrB 的每個 元素值以隨機亂數產生後,兩矩陣相乘存入 ArrD。平行矩陣乘法如圖 12 詳細編寫過程已於 3.1 節介紹,相乘後存入 ArrC。將兩矩陣 ArrC 和 ArrD 相減驗證是否正確。測試矩陣列行值分別為25 × 25、50 × 50、 100 × 100、200 × 200、400 × 400、800 × 800、和1600 × 1600,為了
31 避免矩陣太小而無法量測其計算時間,且讓測試時間結果更加準確無論循 序程式或平行程式都重複計算 100 次。執行結果如表 3,表中顯示計算時 間隨著矩陣大小增加且計算上皆無誤差。而效能如圖 18,由圖可知當矩陣 大小在25 × 25平行效果並不好,表 3 的加速因子也顯示矩陣大小在25 × 25為 0.07483 這告訴我們這個矩陣大小並不適合平行。主要原因在於程式 中【Fork】和【Join】都會消耗一些效能,當矩陣太小時平行反而執行時 間大於循序執行。當矩陣大小從50 × 50到200 × 200時效能開始上升,加 速因子一路攀升至 3.71,平行計算已經比循序計算增加 2.71 倍。當矩陣大 小到200 × 200後上升幅度因硬體限制之下逐漸趨緩,矩陣大小到1600 × 1600加速因子為 3.83 已經與先前加速因此理論值 4 接近。因此在矩陣小 於1600 × 1600時越大的矩陣有越好的平行效果。
4.2 平行運算粒子群最佳化
由圖 16 可知粒子群最佳化的循序演算法,在 3.2 節提到本研究將在迭 代搜尋時(do-while)迴圈內做平行。研究初期本以為在圖 16 第 13 行處 for 迴圈掛上『OpenMP』的 Compiler Directive 指令(#pragma omp for)就可以 將原循序程式成功平行化。程式的確以多執行緒執行但平行效果並不好, 造成平行效果不佳原因及解決方案在 4.2.1 測試結果說明。32
4.2.1 30 個變數平方和之最小值
由圖 16 可知粒子群最佳化的循序演算法。第 13 行是 for 迴圈,迴圈 次數為粒子總數,又先前 3.1 節提過,將 for 迴圈前增加一列『OpenMP』 的 Compiler Directive 指令(#pragma omp for)平行化。雖然效能有明顯上 升,但是仔細觀察其最佳化結果在相同粒子數和迭代次數下,此平行演算 法明顯比循序演算法明顯較差。原因在於多執行緒同時和同一記憶體位置 作存取造成競爭危害(race condition)。利用一種情形說明,假設圖 20 是一 計算目標函數所需資料,而多個執行緒同時需要存取此記憶體空間就可造 成競爭危害。因此本研究將須平行運算的資料全部複製三份一共四份,如 此一來就可以讓四個執行緒同時存取達到平行的效果。利用『OpenMP』 的 Compiler Directive 中 section 的功能將粒子數分為四份,每個執行緒分 別計算四分之一的粒子數。此次測試迭代次數皆為十萬次,𝑐1和𝑐2皆為 2,修改演算法如圖 21 和圖 22,結果如表 4 和圖 23。可知粒子群最佳化 非常適合平行化運算,僅僅使用 4 個粒子作搜尋加速比還有 1.65,當粒子 數增加到 10,000 加速比 3.69,當粒子數再往上加到 200,000 加速比為 3.73 效能達到最高到。本研究發現粒子群最佳化中圖 21 第 40 行也就是尋找族 群最佳位置時這部分本為循序執行。當總粒子數越大此循序執行越久,因
33 此嘗試將此迴圈也分為四份分別放入 section 中。讓每一個 section 中先搜 尋自己的最佳解,離開 section 後再由四個最佳解中挑選一個最好的。修改 後發現效果不如預期中好如表 6,反而在粒子數比較少時因迴圈數太小無 法顯示平行效果。當粒子數達到一百萬時加速比比修改前增加 0.04。此測 試案例設定迭代停止條件為目標函數值小於 1 時收斂情形如圖 24,最佳解 和目標函數值如表 5。
4.2.2 Beale's function
此測試案例也是最佳化測試題目之一如同 4.2.1,Beale's function 如下 𝑓(𝑥, 𝑦) = (1.5 − 𝑥 + 𝑥𝑦)2+ (2.25 − 𝑥 + 𝑥𝑦2)2+ (2.625 − 𝑥 + 𝑥𝑦3)2 最佳解落在𝑓(3,0.5) = 0,搜尋範圍−4.5 ≤ 𝑥, 𝑦 ≤ 4.5,迭代次數皆為 二十萬次。方程式繪製如圖 25。測試效能如表 7 和圖 26,收斂過程如圖 27。觀察到因此案例維度較小因此加速比上升有限,當粒子數 10000 時加 速比為 3.3。由方程式圖 25 可知此案例很容易收斂至最佳解,無論粒子數 多寡幾乎都能目標函數值收斂到 0 或非常接近 0。4.2.3 桁架斷面結構最佳化
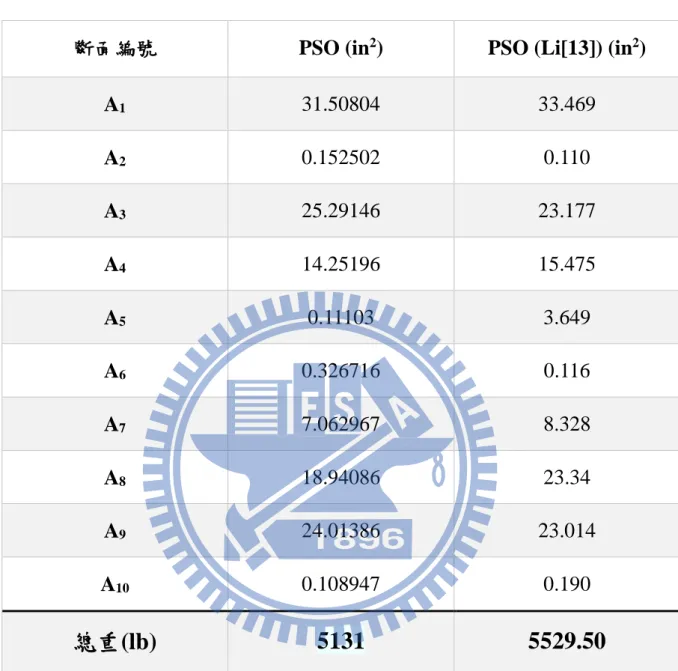
在改寫成平行化運算粒子群最佳化桁架結構遇到一些瓶頸。其中包 括資料衝突,多個執行緒同時需要讀取計算目標函數所需資料,例如桿34 件編號、節點編號、材料參數等,造成執行緒排隊讀取資料。當這些計 算所需資料還沒複製出多個副本前,無論如何調整粒子數平行化的效能 都比循序執行來得低。最難除錯在於斷面參數陣列沒有複製出多個副 本,原因在於因為斷面參數是核心程式的變數。平行運算下效能有上 升,但收斂速度明顯慢得多,甚至不收斂。再循序計算下又可以收斂的 情形下實在難以除錯。最後逐行檢查下才發現這個重大錯誤。這也是編 寫平行程式最難的地方。 本研究測試案例如圖 28 是一 10 支桿件的桁架結構。此案例先前已 有許多學者使用 Li 等人[13]、Perez 等人[14]、Kaveh 等人[15, 16]。因此 利用此案例來驗證程式是否準確。此案例材料密度𝜌 = 0.1 𝑙𝑏⁄𝑖𝑛3、彈性 係數𝐸 = 10000 𝑘𝑠𝑖,桁架一共 10 支桿件 6 個節點。節點和桿件標號如 圖 28。每一隻桿件都有個別的設計斷面,斷面設計限制於0.1 𝑖𝑛2到 35.0 𝑖𝑛2,應力設計限制±25.0 𝑘𝑠𝑖,節點水平或垂直位移限制±2.0 𝑖𝑛。 受力𝑃1 = 100 𝑘𝑖𝑝𝑠和𝑃2 = 0 𝑘𝑖𝑝𝑠。粒子群最佳化參數𝑐1和𝑐2皆為 2,迭 代次數皆為一萬次。斷面最佳結果如表 8,和文獻 Li 等人[13]所使用的 粒子群最佳化比較結果還好。原因可能在於本研究利用多粒子數和大量 的迭代次數搜尋以相同的演算法得到更好的解。平行效果如表 9 與圖 29,可以觀察到與 4.2.1 節的測試案例相差不遠。隨著粒子數增加效能
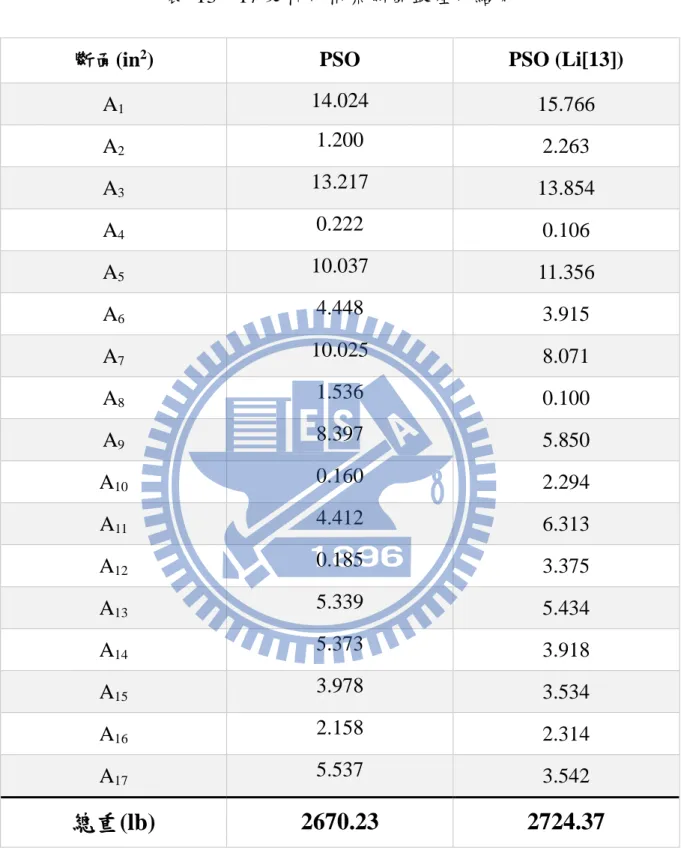
35 也逐漸提高。值得注意的是效能在此試驗因為目標函數改為結構分析多 了許多載入目標函數的資料造成平行效果稍微降低,當粒子數為 5000 時加速比為 3.43。第二次測試利用迭代次數觀察對效能的影響,粒子群 最佳化設定參數𝑐1和𝑐2皆為 2,粒子數固定為 5000。結果如表 10 當迭代 次數增加效能也會隨著增加,原因是每次迭代平行運算部分都會比循序 運算節省時間。因此當迭代次數小於 10000 加速比隨著迭代次數增加而 增加。桁架結構分析結果如表 11 和表 12 皆在限制範圍內,而收斂過程 如圖 30。 第二個桁架測試案例如圖 31,17 支桁架結構。利用相同方式作桁 架斷面最佳化設計,此案例材料密度𝜌 = 0.268 𝑙𝑏⁄𝑖𝑛3、彈性係數𝐸 = 30000 𝑘𝑠𝑖,桁架一共 17 支桿件 9 個節點,應力限制±50 𝑘𝑠𝑖,位移限制 ±2 𝑖𝑛。效能測試結果如表 14 和圖 32,此案例是 17 支桁架結構比上個 案例多了 7 個維度平行化計算量更大,因此加速比提升至 3.54。收斂情 形如圖 33,最佳化斷面結果如表 13。迭代次數多在相同演算法下較 Li 等人[13]好,結構分析如表 15 和表 16,皆符合再限制條件內。 第三個桁架測試案例如圖 34,26 支桁架結構,方法同上作桁架斷 面最佳化設計。此案例材料密度𝜌 = 7.27 × 10−8𝐾𝑁⁄𝑚𝑚3、彈性係數 𝐸 = 207 𝐺𝑃𝑎,桁架一共 26 支桿件 15 個節點,桿件編號如表 17,應力
36 限制±0.334 𝐺𝑃𝑎,位移限制±50.8 𝑚𝑚。效能測試結果如表 18 和圖 35,收斂情形如圖 36,最佳化斷面後結構分析桿件應力和位移如表 19 和表 20。由此案例可觀察應桿件數更多而維度增加,讓平行部分計算量 更多,當粒子總數 4 個加速比已逼近 3,當粒子數 5000 最高加速比達到 3.64。
37
第五章 結論與建議
平行運算粒子群最佳化程式已經開發完成。充分使用現今 CPU 的多 核心架構,而達到較好的運算效能和減少運算時間。利用多種目標函數測 試驗證本演算法可行,因此可得以下結論。5.1 結論
1. 本研究明顯看出電腦硬體不斷在進步和變化,CPU 從原本的單核心演 變至多核心,編寫軟體時也可以多注意是否可以平行化處理。雖然比 起循序程式會多花時間在除錯,一旦成功程式效能就會隨著硬體規格 上升。 2. 在平行矩陣乘法的結果中明顯看出加速比 3.83 因為整個矩陣乘法是可 以平行的演算法,因此在效能有非常顯著的提升。 3. 【30 個變數平方和之最小值】利用粒子群最佳化去求解,因為粒子群 最佳化迭代中在尋找族群最佳解無法完全平行,因此效能比矩陣乘法 低一些。 4. 【桁架斷面結構最佳化】因為結構最佳化目標函數是結構分析,因此 比 4.2.1 節需要載入更多資料,效能當然也會稍微減損,不過當粒子數38 5000 和迭代次數 10000 以上時加速比還是維持在 3.2 以上。17 支桁架 和 26 支桁架結構下因粒子群最佳化維度增加,加速比些許上升。 5. 此平行粒子群最佳化程式只需更改目標函數即可做更多的應用,並不 局限於【30 個變數平方和之最小值】和【桁架斷面結構最佳化】兩種 案例。
5.2 建議
1.
多核心處理器是目前電腦主流使用的,但近年新崛起的GPGPU(General-purpose computing on graphics processing units),也就 是利用電腦中顯示卡來做運算。利用顯示卡大量的核心做更龐大的運 算,但平行化的困難度比使用多核心 CPU 平行還難得許多,顯示卡記 憶體空間也比電腦記憶體來的小,因此控管顯示卡記憶體是編寫
GPGPU 程式一大學問。
2. 將來程式可以改用 Object-oriented programming (OOP)的方式編寫,可 以讓程式有更好的可讀性,方便未來配合使用者或硬體做修改或維 護。例如讓粒子群最佳化中粒子設為一個物件,物件中有𝑋𝑖,𝑗𝑘 、𝑃𝑖,𝑗𝑘、 和𝑉𝑖,𝑗𝑘等參數。
39
參考文獻
[1] "High Performance Computing Training,"
https://computing.llnl.gov/?set=training&page=index. [2] 郭信川,官佳慶, "隨機搜尋法於多極值最佳化問題之應用," 中國造船 暨輪機工程學刊, vol. 19, pp. 33-40, 民國八十九年. [3] 鄭博育, "啟發式桁架斷面尺寸最佳化設計," 國立交通大學, vol. 碩士 論文, 2005. [4] 平行計算基礎理論,系統及應用研究: 國立中正大學資訊工程研究所, 1992.
[5] J. L. Gustafson, "Reevaluating Amdahl's law," Communications of the
ACM, vol. 31, pp. 532-533, 1988.
[6] L. L. N. L. Blaise Barney, "OpenMP."
[7] J. Kennedy and R. Eberhart, "Particle swarm optimization," in Neural
Networks, 1995. Proceedings., IEEE International Conference on, 1995, pp.
1942-1948.
[8] J. F. Kennedy, J. Kennedy, and R. C. Eberhart, Swarm intelligence: Morgan Kaufmann Pub, 2001.
[9] Y. Shi, "Particle swarm optimization: developments, applications and resources," in Evolutionary Computation, 2001. Proceedings of the 2001
Congress on, 2001, pp. 81-86.
[10] 蘇維農, "JMC: 基於 OpenMP 3.0 平行程式設計模型, 實作支援 OpenMP 的 Java 語言編譯器及執行期間程式庫," 清華大學資訊工程學系
學位論文, 2010.
frame-40
structures," The London, Edinburgh, and Dublin Philosophical Magazine and
Journal of Science, vol. 8, pp. 589-597, 1904.
[12] L. A. Schmit and B. Farshi, "Some approximation concepts for structural synthesis," AIAA journal, vol. 12, pp. 692-699, 1974.
[13] L. Li, Z. Huang, F. Liu, and Q. Wu, "A heuristic particle swarm optimizer for optimization of pin connected structures," Computers & Structures, vol. 85, pp. 340-349, 2007.
[14] R. Perez and K. Behdinan, "Particle swarm approach for structural design optimization," Computers & Structures, vol. 85, pp. 1579-1588, 2007.
[15] A. Kaveh and S. Talatahari, "A hybrid particle swarm and ant colony optimization for design of truss structures," Asian J Civil Eng, vol. 9, pp. 329-48, 2008.
[16] A. Kaveh and S. Talatahari, "Particle swarm optimizer, ant colony strategy and harmony search scheme hybridized for optimization of truss structures,"
Computers & Structures, vol. 87, pp. 267-283, 2009.
[17] Flynn, Michael J. "Some computer organizations and their
effectiveness."Computers, IEEE Transactions on 100.9 (1972): 948-960.
[18] 張舒、祩絕利、趙開勇, "GPU 高性能運算之 CUDA," 松崗出版社,
2011.
[19] Erbatur, Fuat, et al. "Optimal design of planar and space structures with
genetic algorithms." Computers & Structures 75.2 (2000): 209-224.
[20] Aarts, Emile, and Jan Korst. "Simulated annealing and Boltzmann
machines." (1988).
[21] Glover, F., & Laguna, M. (1997). Tabu search (Vol. 22). Boston: Kluwer academic publishers.
41
附表
表 1 費林分類法[17] 單一指令流 多指令流 單 一 資 料 流 SISD MISD 多 資 料 流 SIMD MIMD 指令源 資料源 PU 指令源 資料源 PU PU 指令源 資料源 PU PU 指令源 資料源 PU PU42 表 2 OpenMP Directives directive-name [clause, ...] #pragma omp parallel do for 非必要 例如:shared(x) (Enter) 表 3 矩陣乘法測試結果 矩陣列行大小(m*n) 循序 (秒) 平行(秒) 加速比 誤差 25 0.011 0.147 0.07483 0.0 50 0.056 0.037 1.513514 0.0 100 0.462 0.16 2.817073 0.0 200 3.711 1.169 3.174508 0.0 400 35 10.783 3.24585 0.0 800 396.67 115.92 3.421929 0.0 1600 4669.6 1216.67 3.838017 0.0
43 表 4 30 個變數的最小平方和最佳化執行時間與加速比 粒子總數 循序(秒) 平行(秒) 加速比 4 1.923 1.163 1.653482 20 8.647 3.329 2.597477 60 25.535 8.358 3.055157 120 51.466 15.459 3.329193 240 102.49 29.807 3.438454 500 209.616 63.54 3.298961 1000 422.97 125.87 3.360372 10000 4231.897 1150.45 3.678471 100000 41819.5 11395.7 3.669761 200000 83466.2 22381.6 3.729233 500000 207222 55882.2 3.708193
44 表 5 30 個變數的最小平方和最佳化執行結果 變數 變數值 1 0.0889 2 0.0657 3 -0.0166 4 0.0381 5 0.0095 6 0.2 7 -0.1084 8 -0.0029 9 0.1548 10 -0.1425 11 -0.0601 12 0.1514 13 -0.3342 14 -0.0039 15 -0.09 16 -0.1522 17 0.1766 18 0.1782 19 -0.0439 20 0.4742 21 0.1943 22 -0.1191 23 -0.3156 24 -0.0576 25 -0.1914 26 -0.251 27 -0.0625 28 0.1707 29 0.0273 30 0.1035
目標函數值:0.868313611
45 表 6 修改平行程式後測試 粒子總數 修改前(秒) 修改後(秒) 相差(秒) 加速比差異 4 1.163 1.495 -0.332 -0.36719 20 3.329 3.44 -0.11 -0.08016 60 8.358 8.97 -0.612 -0.20845 120 15.459 15.712 -0.253 -0.05361 240 29.807 31.06 -1.253 -0.13871 500 63.54 64.133 -0.593 -0.0305 1000 125.87 125.236 0.634 0.017012 10000 1150.45 1147.19 3.26 0.010453 100000 11395.7 11358.4 37.3 0.012051 200000 22381.6 22336.2 45.399 0.00758 500000 55882.2 55488 394.2 0.026344 1000000 110270 109083 11870 0.0402
46 表 7 Beale's function 粒子數與加速比關係 粒子總數 循序(秒) 平行(秒) 加速比 20 1.884 1.31 1.43 60 5.023 2.525 1.99 120 9.879 4.105 2.41 240 19.61 7.073 2.77 500 39.998 13.691 2.92 1000 79.639 27.92 2.85 5000 393.07 125.341 3.14 10000 782.09 237.309 3.30
47
表 8 10 支桿件桁架斷面最佳化結果
斷面編號 PSO (in2) PSO (Li[13]) (in2)
A1 31.50804 33.469 A2 0.152502 0.110 A3 25.29146 23.177 A4 14.25196 15.475 A5 0.11103 3.649 A6 0.326716 0.116 A7 7.062967 8.328 A8 18.94086 23.34 A9 24.01386 23.014 A10 0.108947 0.190
總重(lb)
5131
5529.50
48 表 9 10 支桿件最佳化執行時間與粒子總數關係 粒子總數 循序(秒) 平行(秒) 加速比 4 0.897 0.391 2.29 20 4.195 1.605 2.61 40 8.464 3.06 2.76 100 24.328 8.415 2.89 500 103.532 32.412 3.19 1000 207.76 63.445 3.27 5000 1017.89 296.806 3.42
49 表 10 10 支桿件最佳化和迭代次數關係 迭代次數 循序執行(秒) 平行執行(秒) 加速比 20 2.199 1.491 1.47 50 5.176 2.502 2.07 100 10.601 4.477 2.37 500 52.533 16.983 3.09 1000 103.133 32.499 3.17 5000 513.57 153.528 3.35 10000 1017.89 296.806 3.43 50000 5132.183 1498.93 3.42
50 表 11 10 支桿件最佳化斷面後節點位移 節點編號 X 方向 (in) Y 方向 (in) 1 0.488 -1.75 2 -0.378 -1.80 3 0.423 -0.741 4 -0.296 -0.775 5 0 0 6 0 0 註: 節點 5 和 6 為鉸支承 限制為 ±2 in
51 表 12 10 支桿件最佳化斷面後結構分析桿件應力 桿件編號 桿件應力 (ksi) 1 -7.29 2 0.81 3 8.00 4 7.03 5 -22.05 6 0.21 7 -17.82 8 7.15 9 -5.73 10 -1.27 註: 限制為 ±25 ksi
52
表 13 17 支桿件桁架斷面最佳化結果
斷面(in2) PSO PSO (Li[13])
A1 14.024 15.766 A2 1.200 2.263 A3 13.217 13.854 A4 0.222 0.106 A5 10.037 11.356 A6 4.448 3.915 A7 10.025 8.071 A8 1.536 0.100 A9 8.397 5.850 A10 0.160 2.294 A11 4.412 6.313 A12 0.185 3.375 A13 5.339 5.434 A14 5.373 3.918 A15 3.978 3.534 A16 2.158 2.314 A17 5.537 3.542
總重(lb)
2670.23
2724.37
53 表 14 17 支桿件最佳化和粒子總數關係 粒子總數 循序執行(秒) 平行執行(秒) 加速比 4 0.948 0.465 2.04 20 4.297 2.092 2.05 40 8.78 3.94 2.23 100 21.127 9.005 2.35 500 106.939 35.042 3.05 1000 212.283 60.907 3.49 5000 1058.427 298.65 3.54
54 表 15 17 支桁架結構最佳化斷面後節點位移 節點編號 X 方向 (in) Y 方向 (in) 1 0 0 2 0 0 3 -0.082 -0.278 4 0.089 -0.267 5 -0.173 -0.687 6 0.164 -0.637 7 -0.251 -1.217 8 0.242 -1.268 9 -0.313 -1.999 註: 節點 1 和 2 為鉸支承 限制為 ±2 in
55 表 16 17 支桁架結構最佳化斷面後結構分析桿件應力 桿件編號 桿件應力 (ksi) 1 -26.74 2 -29.45 3 24.59 4 -3.41 5 -22.49 6 -23.61 7 27.36 8 -14.92 9 -23.48 10 -24.79 11 23.30 12 15.17 13 -26.49 14 18.61 15 26.67 16 16.87 17 24.82 註: 限制為 ±50 ksi
56 表 17 26 支桁架結構桿件編號表 桿件編號 開始節點 結束節點 1 1 2 2 1 7 3 2 7 4 2 8 5 2 3 6 3 8 7 3 14 8 4 15 9 4 12 10 4 5 11 5 12 12 5 13 13 5 6 14 6 13 15 7 8 16 8 9 17 8 14 18 9 10 19 9 14 20 10 14 21 10 11 22 10 15 23 11 15 24 11 12 25 12 13 26 12 15
57 表 18 26 支桁架結構最佳化和粒子總數關係 粒子總數 循序執行(秒) 平行執行(秒) 加速比 4 2.344 0.795 2.95 20 11.506 3.666 3.14 40 22.945 7.151 3.21 100 56.192 17.553 3.20 500 281.287 84.064 3.35 1000 556.545 160.861 3.46 5000 2832.562 779.182 3.64
58 表 19 26 支桁架結構最佳化斷面後桿件應力 桿件編號 桿件應力 (GPa) 1 3.202E-02 2 -3.291E-02 3 2.012E-01 4 -1.873E-01 5 5.112E-02 6 3.371E-01 7 7.193E-02 8 7.193E-02 9 3.371E-01 10 5.112E-02 11 -1.873E-01 12 2.012E-01 13 3.202E-02 14 -3.291E-02 15 -4.836E-02 16 -4.577E-02 17 -1.647E-01 18 -6.333E-02 19 1.599E-01 20 5.936E-02 21 -6.333E-02 22 5.936E-02 23 1.599E-01 24 -4.577E-02 25 -4.836E-02 26 -1.647E-01
59 表 20 26 支桁架結構最佳化斷面後節點位移 節點編號 X 方向 (mm) Y 方向 (mm) 1 5.94 -50.79 2 3.65 -45.15 3 0.00 0.00 4 0.00 0.00 5 -3.65 -45.15 6 -5.94 -50.79 7 7.98 -50.17 8 -1.29 -24.72 9 1.78 -24.33 10 0.00 -11.72 11 -1.78 -24.33 12 1.29 -24.72 13 -7.98 -50.17 14 10.47 -14.27 15 -10.47 -14.27
60 表 21 26 支桁架結構最佳化斷面結果 斷面編號 斷面面積 (𝒎𝒎𝟐) 𝑨𝟏 2810 𝑨𝟐 3057 𝑨𝟑 400 𝑨𝟒 481 𝑨𝟓 3521 𝑨𝟔 478 𝑨𝟕 3754 𝑨𝟖 3754 𝑨𝟗 478 𝑨𝟏𝟎 3521 𝑨𝟏𝟏 481 𝑨𝟏𝟐 400 𝑨𝟏𝟑 2810 𝑨𝟏𝟒 3057 𝑨𝟏𝟓 2913 𝑨𝟏𝟔 3957
61 𝑨𝟏𝟕 547 𝑨𝟏𝟖 3496 𝑨𝟏𝟗 504 𝑨𝟐𝟎 3033 𝑨𝟐𝟏 3496 𝑨𝟐𝟐 3033 𝑨𝟐𝟑 504 𝑨𝟐𝟒 3957 𝑨𝟐𝟓 2913 𝑨𝟐𝟔 547
總重 (KN)
24.2
62
附圖
待解問題 tN ‧‧‧ t2 t1 t0 處理器 指令集 圖 1 傳統連續處理 待解問題 tN ‧‧‧ t2 t1 t0 處理器 處理器 處理器 指令集 圖 2 平行處理63 圖 3 平行層次圖[18] 圖 4 OpenMP 發展流程圖 叢集或分散式平行(Cluster/Distributed Parallel) 多處理器平行(Multi-Processor Parallel) 多核心平行(Multi-Core Parallel) 單核心指令平行 (Instruction Level Parallelism) Fortran 1.0 •1997 C/C++ 1.0 •1998 OpenMP 2.5 •2005 OpenMP 3.0 •2008 OpenMP 3.1 •2011
64 圖 5 Fork/Join Model Parallel region Fork A B C D
Master thread Join
Threads
65 開始 設定粒子群最佳化參數、目標函數、搜尋 範圍、和停止條件 初始化族群,隨機產生粒子初始位置𝑋𝑖,𝑗0 和初始速度𝑉𝑖,𝑗0,並將每 個初始位置存至個別粒子最佳位置𝑃𝑖,𝑗0 將初始位置代入目標函數計算目標函數值,並且將最佳位 置存入𝑃𝑔,𝑗0 是否滿足停止條件 計算目標函數值,並更新𝑃𝑔,𝑗k+1和𝑃𝑖,𝑗k+1 結束 否 是 利用(式 1)和(式 2)更新下一代粒子的 速度𝑉𝑖,𝑗k+1和位置𝑋 𝑖,𝑗k+1 圖 7 粒子群最佳化流程圖
66
圖 8 簡易 OpenMP 程式
67
68
圖 11 矩陣乘法
69
圖 13 競爭危害範例
70
71 Pseudocode
1: for (i=0; i<粒子總數; i++)
2: for (j=0; j<維度; j++)
3: 初始化:𝑋𝑖,𝑗0 、𝑉𝑖,𝑗0、𝑃𝑖,𝑗0
4: 計算目標函數值
5: end for
6: end for
7: for (i=0; i<粒子總數; i++)
8: if( 𝑓(𝑃𝑔0)>𝑓(𝑋 𝑖0) ) 9: 𝑃𝑔,𝑗0 =𝑋𝑖,𝑗0 ; 10: end for 11: do{ 12: 隨機產生𝑟1, 𝑟2
13: for (i=0; i<粒子總數; i++) {
14: for (j=0; j<維度; j++) { 15: 𝑉𝑖,𝑗𝑘+1 = 𝑉𝑖,𝑗𝑘 + 𝑐1𝑟1(𝑃𝑖,𝑗𝑘 − 𝑋𝑖,𝑗𝑘) + 𝑐2𝑟2(𝑃𝑔,𝑗𝑘 − 𝑋𝑖,𝑗𝑘); 16: 𝑋𝑖,𝑗𝑘+1= 𝑋𝑖,𝑗𝑘 + 𝑉𝑖,𝑗𝑘+1; 17: end for 18: 計算目標函數值𝑓(𝑋𝑖,𝑗𝑘+1); 19: if (𝑓(𝑃𝑖𝑘) > 𝑓(𝑋𝑖𝑘+1)) 20: for (j=0; j<維度; j++) 21: 𝑃𝑖,𝑗𝑘+1= 𝑋𝑖,𝑗𝑘+1; 22: end for 23: end if 24: if (𝑓(𝑃𝑔𝑘) > 𝑓(𝑋 𝑖𝑘+1)) 25: for (j=0; j<維度; j++) 26: 𝑃𝑔,𝑗𝑘+1= 𝑋𝑖,𝑗𝑘+1; 27: end for 28: end for 29: counter++; 30: while(counter>limit) 31: 得最佳解:𝑃𝑔,𝑗𝑘 圖 16 粒子群最佳化虛擬碼