QUATERNION MATRIX SINGULAR VALUE DECOMPOSITION AND ITS
APPLICATIONS FOR COLOR IMAGE PROCESSING
Soo-Chnng
Pei
Ja-Hnn Chang and
JianJiunDing
Depmment of
Electrical Engineering NationalTaiwan
University, TaipeiTaiwan
10617,R. 0. C.
E-mail:pci;~~,cc.cc.ec.ntu.cdu.tw
Fax:
886-2-23671909Abstract
In this paper, we first discuss the singular value decomposi- tion (SVD) of a quaternion matrix and propose an algorithm to calculate the SVD of a quaternion matrix using its equivalent complex matrix. The singular values of a quaternion matrix are still real and positive, but the two unitary matrices are quater- nion matrices with quaternion entries.
Then, applications for color image processing by the SVD of a quaternion matrix are given. Since a quatemion matrix can represent a color image, so we can use the SVD of a quaternion matrix to decompose a color image. Therefore, many useful image processing methods by
SVD,
such as eigen-images, im- age compression, image enhancement and denoise, can be ex- tended to color image processing without separating the color image into three channel images.1.
INTRODUCTIONThe well-known concept of quaternions was introduced by Hamilton in 1843 [I]. Quaternions are the generalization of complex numbers. A quatemion has 4 components, i.e., one real part and three imaginary parts:
q = q, + q , . i + q ,
.
j+
q1.
k.
(1) and iJ, kobey the rules as below:; ' = j ' = k ' = - l , i . j = k , j . k = ; , k . i = j , j .i :
-k ,
k . j = -i i . k = - j . (2) Besides, by negating the three imaginary parts, every quaternion 9 has its conjugate, q* = 4.- < q i - J q , - k q r . From (2), we can find that the multiplication rule of quaternions is not commuta- tive.In this paper, we focus on the quaternion matrices, so the de- tailed introduction of quaternions is not discussed here. This information can be found in [I].
Until now, some papers on the quaternion matrices have been published. In 1947, H. C. Lee gave a discussion about the cal- culation of the eigen-values of a quaternion matrix 121. The ei- gen-values of a quatcrnion matrix can be calculated by the ei- gen-values of an equivalent complex matrix. In 1950, J. L. Brenner gave some theorems for the quaternion matrix [3]. Brenner has shown that every quaternion matrix can be trans- formed into triangular form and has a characteristic root. In 1989, A. Bunse-Gerstner, R. Byers and V. Mehrmann developed a quaternion QR algorithm [4]. Every quaternion matrix can be decomposed into the multiplication of 2 matrices, Q and R, where Q is a unitary matrix and R is a upper triangular matrix. In 1997, F. Zhang gave a detailed discussion about the quater- nion matrix [5]. Using the same concept as
A.
C. Lee, Zhang proved that the existence of the polar decomposition of anyquatemion matrix and this proof process can be used for the existence of SVD.
In this paper, we use the Same concept as R. C. Lee and F. Zhang to calculate the eigen-values of the quaternion matrix and develop an algorithm to compute the SVD of a quatemion ma- trix by means of the SVD of its equivalent complex matrix.
The rest of this paper is organized as follows. In Sec. 2, we discuss the eigen-values and eigen-vectors of a quaternion ma- trix. An equivalent complex matrix is useful to calculate these elements. In Sec. 3, we give an algorithm to compute the SVD of a quaternion matris by the SVD of its equivalent complex matrix. Then, applications of the SVD of a quaternion matrix for color image processing are given in Sec. 4. Many useful image processing nicthcds by SVD can be extended to color image processing without separating the color image into three channel images. Finally, conclusions are made in Sec 5.
Besides, we will use the following notations: Qld. Ql,c,: A quaternion matrix and a complex matrix.
, ?(<, : A quaternion vector and a complex vector Ci: The set of complex numbers with nonnegative imaginary Q.lcl. The equivalent complex matrix of a quaternion matrix
part.
Qw
11. EIGEN-VALUESAND E I G E N - V E m O R S O F A QUATERNION MATRIX
The eigen-values and eigen-vectors of a quaternion matrix have been discussed in [ 2 , 5 ] . Here, we will give a brief renew. Definition 1 : Left eigen-values mid right eigen-values
Due to the iion-commutative multiplication rule of quater- nions, the eigen-values of a quaternion matrix have two catego- ries, leR eigen-values and right eigen-values, which satisfy the following equations, respectively,
e,,,
FCqj
=I..?
ld (Left),e,,,
.Y,,
=
gCq,.L
(Right) (3) In this paper. we only use the right eigenlvalues and we adopt the name 'eigen-value' to represent the right eigen-value. D e f i i t w n 2 : Eigcu-value clossIfAis one eigen-value of a quaternion matrixQ(* then every element of the set
r
=
{q@ : where q is any unit quaternion with its n o m 191=1) is also an eigen-value of Q(+ Moreover, this setr
will contains a single eigen-valueA,~C*so that this set is called the eigen-value class of&. ( The proof can be found in [4][5]) Furthermore, the conjugate ofA, also belongs tor.
Except forAc and its conjugate, all other elements inr
are qua- ternion numbers'Therefore, the eigen-values of a quaternion matrix arc infinite Hoasver. the eigen-value classes are finite. A i r * n quatcriiian matrix will have I Z eigen-values classes. that is, n complex ei- pen-values with nonnegative imagine part.
In the sequel. we only calculate the complex eigen-values with nonnegative imaginary partA,E C'ofa quaternion matrix. Definition 3 : Eqrrivnlerzi complex n z n h i . ~ of a qtmfcrniorz monix
Let Q,, be a I I * U quaternion matrix and Qid= A,,) + BCc1 j.
where Al,,and Bee) are two complex matrices, then the equiva- lent complex matrix ofQlg is
_ -
( 4 ) The relations between the quaternion matrix and its equivalent comples matrix can be found in (51 and are brietly summarized in theorem 1
Theorem I : Relotiom between a qaotemiori mntri.r nnd its
eqaivnleitt conip1e.r nrahix
Let Ql,. Qi,, and Q2(d be three n*n quaternion matrices, then
the equivalent complex matrix of@gj_ where the superscript 0 = H or -1 ( means the hermitian transpose and -I means the inverse ofthe matris.)
Therefore, many properties ofQo and Qdc.)are similar. Resides. we can iise the eigen-values and eigen-vectors ofQ,,,to find the eigen-values and eigen-vectors of Q,,,.
Theorem 1 : Eigen-values arid eige,i-vectnrs of o qimc'miou matrix and its eqtiivaleiit complex mo1ri.r. [SI
are the same as the eigcn-values ofQeI,, Besides. ifAis one ei- gen-value ofQ,,), then A* will be another one. Therefore: every real eigen-values of Qolcjoccurs an even number of times. There are n pairs of complex-conjugate eigcn-values or dual real ei- gen-values o f t h e complex matrixQ,,,. so wc can get n complex eipen-values with nonnegative imagery part of the quaternion matrix Q w ( A real eigen-value is a complex eigen-value with zero irnageiy part.)
i
.?:ccl]r is a eigen-vector of the complex matrix Qe(cl for A_ then ?(ql=
[.F,,,,]-[,?;!,,].j is a eigen-vector of the quaternion matrix Q o for A. where the su-perscript
*
represents the complex conjugate,.?lco
and .?2(r, aren*l complex column vectors. is ?n*I compkx column vector. and
.flqj
is n'1 quaterniun coliinin vector.Consequently, we can use the eigen-values and eigen-vectors of the equivalent complex matrix to calculate the eigen-values and eigen-vectors of the quaternion matrix.
(a) 1fQtc= Q I
. Q x ,
~ then Q+)= Q1.m .Qz,N+ (h)Let Q,,= A(c)+ Blc,j> then the complex rigen-values of
Moreover, if f =
E )
111. SINGULARVALUE DECOMPOSITION O F A QUATERNION MATRIX
In
[SI.
the author has proved the existence of the polar de-composition of a quaternion matrix and this proof can be used for the existence of SVD. We review this esistence in theorem 3 and give a theorem and a detailed algorithm to calculate the
SVD
o f a quaternion matrix.Theorem 3 : Exisfence ofthe SID of. qeaterniori m n h i x
exist two unitary quaternion matrices
Let be a n*n quaternion matrix with rank r, then there and l'(q) such that
-["-
-
0 ' ] = A - w h e r e 0 &=diag(A,, ....
&]and A's are the positive singular values of8,.
("
means the berm- tian transpose). Q,,
The proof of this theorem can be found in [SI.
T h e o w n 4: The nreonings and relorions bemeen ihc Sl'D of0
qanlerriion ntotrix andthe SPD ofifs eqsivaleril complex niahir
Let the SVD of a quaternion matrix and its equivalent coni- plex matrix are Q,
=uCq,.
A.T$ and&,,,
=U,,.
'I, .I<;.
re- spectively. thenQl,,Q~,=U,,,~A2~ti~l.
Q:,Qlg1 =P&).h'.V"-
id ( 5 ) QS(')Qe&=t'(.l
.(A')z.u[l> =L<c)~ ( ~ ~ ' ) ~ . r < ~ .
( 6 )Hence. the meanings of the SVD o f a quaternion matrix arc :
(I)A* is the real eigen-value diagonal matrix of
QlqlQZ,
andGQC,,
(2) The column vectors of Ulq) and l'(Q are the eigen-vectors of
Since Qcicl is the equivalent complex matrix of Q(, , then
Q Q" *I?, and Qa''Q,,,, are the equivalent complex matrix of
*IC,
Qi,,Q", and @,Q,,, by theorem 1. Hence, the relations be-
tween A' and A, U,,, and U,,, Vie, and , l' are :
(ljAZand(A' )'are the reo1 eigen-value matrix of Q,&, and
Q~,~,Q~:~,
.
respectively, so every element of A' will occurtwice in (A' )* . Hence_ deleting tlie half duplicate singular values in A' will became A.
Q&?:,
andQtJ&
,
respectively.(2) The column vectors of U, andUi,, are the eigen-vectors of
Q&:, and
Qe,,,QwYG),
respectively. so we can use theorem 2 to calculate the column vectors of U ( , by the column vec-( 3 ) By the same reason and step as (Z), we can calculate VI, However. for each eigen-value, it occurs twice in A . so there are two different column vectors of lJic)(or 1'~~)) can be used to
calculate the column vectors of U,, (or bid). We will have 2" numbers of choice of thc column vectors of Uldand
Pi@.
As aresult, tlie SVD of Qis,is not unique.
In this paper. we use the first corresponding eigen-vector to calculate the column vectors of Ulaand I++
Therefore. by means of the theorem 2 and 4, the algorithm to
calculate the
S V D
of a quaternion inatrix Q u can he perrorlned tors of U,,,from P;+
by the following steps :
Step 1 : Calculate the equivalent complex matrixQ,, by (4). Step 2 : Calculate the SVD of thee,,) by the conventional SVD
of a complex matrix. AssumeQ.(,rU(,flV(c~.
Step 3 : The singular matrix of Q(d,A, can be calculated by theorem 4 and A'
,
and the two unitary quaternion ma- trices of Q0, U(d and Ycd, can be computed by theorem 2,4, and V(c)
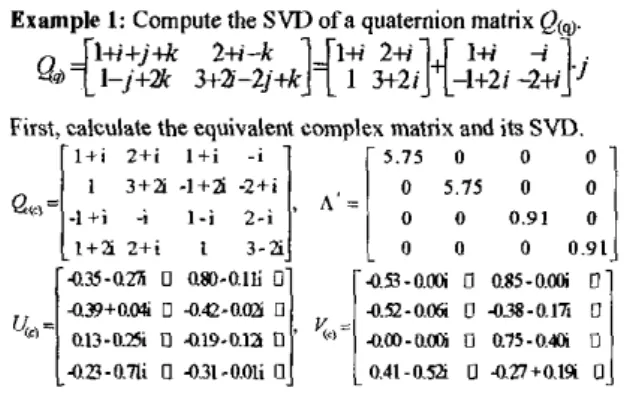
Example 1: Compute the SVD o f a quaternion matrix
First, calculate the equivalent complex matrix and its SVD.
l + i z+i I + i - i 5.75 U 0 0
1 3+21 -I+a -Z+i 5.75 U
l+21 Z+i
4.53-U.mi 0 0.85-0OOi 0 439+U.M 0 442-0.02 0 an-0.m 0 438-U.ITI U
m - n m
U 031-u.oii U 0.41-0% 0 427+0,l% 0 We only need half column vectors of U,,) and &),so the other half ones are not shown above. Therefore, the SVD are :N.
APPLICATIONS OF THE SVD OFA QUATERNION MATRIXRecently, using a quaternion matrix&,(m, n) to represent a color image has been adopted by many researchers [7]-[9]:
, wherefdm, n),fo(m, n),fa(m, n) represent the
R,
G
B parts of the color image.We also adopt this representation, then the SVD of a color image is
&)
( m 4
=f ,
(m+
+ A
( w ) j+f,
(m+
(7)A,,
= C J ( 4 ) ' A .5:)
(8)where/\, U(@and V(dcan be computed by the steps in Sec. 3. From the
S V D
of a color image, many useful image process- ing methods byS V D
can be extended to a color image without separating the color image into three channel images. Here, we will introduce some useful color image processing applications. Eigen-images :Similar to the SVD of a gray image [6], the SVD o f a color image/&, can be decompsed into the summation of vector outer oroducts.
, where u,<d and are the column vectors of U(aand V(@, re- spectively,h is the diagonal terms of real matrix r\, and R is the
rank offid. Every product yH is called an eigen-image.
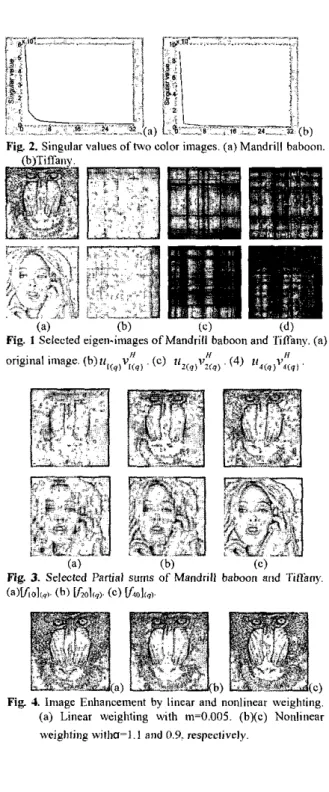
Hence, the color image f&can be considered as the linear com- bination of R color eigen-images. Fig. 1 illustrates some color eigen-images of Mandrill baboon and Tiffany. ( The sizes of these images is 256*256). These figures illustrate normalized absolute-value versions of the first, second, and fourth ei-
gen-images obtained from the decomposition of the original images. Similar to the complex matrix, the preceding ei- gen-images represent the low-frequency components of the original image, and the later ones represent the high-frequency components.
Image Compression
The singular values of the two color images in Fig. I are shown in Fig. 2. The same as the conventional complex case, the singular values decay very fast. Hence, an approximate repre- sentation of the color image can be formed by summing the preceding K eigen-images :
f(1J ,((I)
I;
[A& =c4
'%'v,:7J ( K S R ) (10)1-1
The real part of
R9)IK
is small and will decrease to zero when K increases to R and one color image have only 3 components. so the real part of &IKwill be discarded. However, the ignorance ofthe real part of @&is acceptable.In general, small K can provide a good estimation of original color image. Consequent1 , the storage requirements for this ues; 2K N'I quaternion vectors. Besides, one quaternion vec- tor is equivalent t o four real vectors. ) Fig. 3 illustrates three estimated images of the color images in Fig. 1 with K=IO, 20 and 40.
Besides, to analyze the performance of this estimation, the
PSNR
of the estimated color images for K=10, 20, 30, 40, 50, 60 and for three well-known color images, "Baboon, Lena and Tiffany", are given in Table 1. The color image Baboon has many high frequency components, so the performance is the worst among these 3 images. The color image Tiffany has less high frequency components, so the performance is the best. Image EnhancementImage enhancement can be done simply by weighting the sin- gular values. Similar to the conventional case, there are two kinds of image enhancement by means of
SVD,
linear weighting and nonlinear weighting 161.The linear weighting is
color image drop from 3N
Y
to K(2*4N+1). ( K real singular val-[ f ~ , ~ ~ = ~ ( l + m . i ) r l ~ . . ~ , , , . v ~ , ( m > o ) (11) Linear weighting will enhances ihe high frequency components, so it is similar to a high pass filter. On the other hand, the non- linear weighting is
H (12)
If u>1, nonlinear weighting is a low pass filter. Contrarily, if U
4, it will be a high pass filter [6].
Fig. 4 illustrates the effects of the image cnhancenient. The enhanced color image of the linear weighting with m= 0.005 is shown in Fig. 4(a). The enhanced color images of the nonlinear weighting with a=l.1 and 0.9 are shown in Fig. 4 (b) and (c), respectively.
1=1
R
[& =
c
,zp
' U<(,) .",IT)l i l
V. CONCLUSION
In this paper, we lirst review some important concepts of a quaternion matris. such as left and right eipen-values, ei- gen-vectors. eigen-value class and the equivalciit complex ma- trix etc. ‘Then we discuss the SVD of a quaternion matrix and give an effcicnt algorithm to calculate it by the SVD of thc equivalent complex matrix. Finally_ w e give somc applications by using the
S V D
of a quaternion matrix.The SVD of a quaternion matrix can be used in many areas: such as the inverse and pseudoinverse of a quaternion matrix and color image processing. By the
S V D
of a quatrrnion matrix, we can compute the SVD of a color image processing without separating it into three chaiinel images. Then. man!’ useful im- age processing method by SVD can be extended for color ini- ages, such as eigen-images, image compmssion_ image eii- hancemeiit and denoise. Consequently.S V D
of a quaternion matrix is a useliil tool for color image processing.REFERENCES
[ I ] W. R. Hamilton. “ E l m ~ e n l s of Qanier,iiorn”. Longmans, Green and Co.. London, 1866.
[ 2 ] H. C. Lee. ‘Eigeii-values and Canonical forms
OF
matrices with quaternion caeficients‘;Proc. R.I.A. 52. Sect. A. 1949. pp. 253-2150,[ 3 ] J. L. Brenner. “Matrices of qaoternioiis”, Pacific J. & f d r .
,
1951. pp. 329-335.141
A . Bonse-Gerstner. R. Byers and V. Mehrmann. ‘:4 Qimier-niori QR Algorikn,”. “hmerisclre Afotlrenrnrik. Vol. 5 5 , 1989, pp. 83-95.
151 F. Zhang. “Qriitlernioirs and matrices oJQrtnferiiiom”, Lin- ear algebra and its applications, 1997, pp. 21-57.
[ 6 ] H. C. Andrews and C. L. Patterson, ‘Singular Value De- composition and Digital Image Processing’. IEEE Trms. Acoasiic.7. Speech. arid Signal Procesring. February 1976, pp.
81-108.
171 S . C. Pei, J. J. Ding; and J.N. Chaiig ‘Efficient iinplementa- lion of quaternion Fouriir transform, convolution. and corte- lation by 2-D FFT’. IEEE Trans. Signnl P r o c e s r i q vol. 49, No.1 lINov. 2001. pp 2783-2797.
181 C. J. Evans, S. J. Sangwine and T. A. Ell. ‘Color-sensitive edge detection using Hypercomplex filters‘. Procesring
EUSIPCO 2000, Tampere. Finland. Sep. 2000.
(91 S. I. Sangwine and T. A. Ell_ ‘Hypercomplex auto- and cross-correlation ofcolar images‘. p. 319-323: ZEEE Zmernn- iioiialCoiferer~ce on Iniage Processing 1999.
Fig. 2. Singular values of two color images. (a) Mandrill baboon.
3, I . 1
Fig. 4. Image Enhancement by linear and nonlinear weighting.
(a) Linear weighting with m=0.005. (bXc) Nonlinear weighting wilha=l.l and 0.9. respectively.
Tiffany )27.?786)30.7415)33.1189~35.0070~36.6453~38.1338 Table 1. PSNR of the approsimated color images. Baboon.
Lena and Tiffany. with different K eigen-images