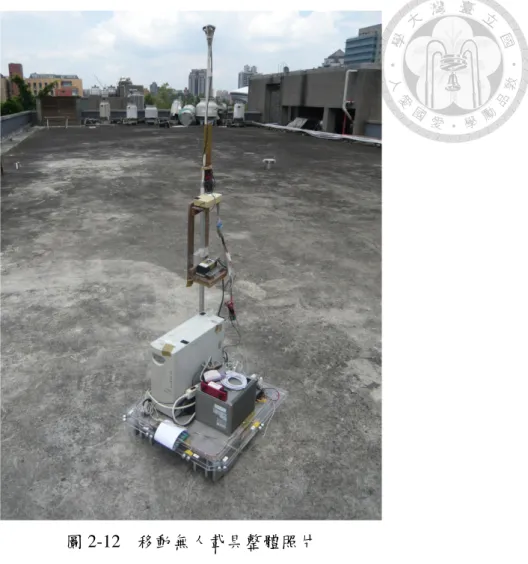
GPS動態定位演算法與無人載具實驗
全文
數據



![圖 3-1 ECEF 座標系統[15]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9600704.628887/23.892.120.786.108.1045/圖31ECEF座標系統15.webp)
![圖 5-3 網格示意圖[14] 5.2 超音波系統 5.2.1 超音波測距原理 音波傳遞至物體表面會反射回音,因此可透過計算音波發射和接收回音的時 間差計算障礙物至感測器之間的距離。超音波為振動頻率超過人耳能感知的聲波 (16~20kHz),應用在各種感測上,其中低頻的音波(20kHz~數百 kHz)多用於測距。 此系統所使用的 Devantech 公司 SRF05 超音波感測器,為雙頭式感測器,在 同側有一發射器和一接收器。發射器利用壓電逆效應,在壓電晶片上施加脈衝電 壓使壓電材料震動產生](https://thumb-ap.123doks.com/thumbv2/9libinfo/9600704.628887/41.892.257.784.117.413/網格示意超音波系超音波測距原音波傳遞至物體表器之間和一接收器.webp)
![圖 5-6 FPGA 對超音波感測器提供之觸發訊號[10]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9600704.628887/43.892.182.788.119.286/圖56FPGA對超音波感測器提供之觸發訊號1.webp)
Outline
相關文件
3.16 Career-oriented studies provide courses alongside other school subjects and learning experiences in the senior secondary curriculum. They have been included in the
Study the following statements. Put a “T” in the box if the statement is true and a “F” if the statement is false. Only alcohol is used to fill the bulb of a thermometer. An
The Hilbert space of an orbifold field theory [6] is decomposed into twisted sectors H g , that are labelled by the conjugacy classes [g] of the orbifold group, in our case
Because simultaneous localization, mapping and moving object tracking is a more general process based on the integration of SLAM and moving object tracking, it inherits the
The remaining positions contain //the rest of the original array elements //the rest of the original array elements.
structure for motion: automatic recovery of camera motion and scene structure from two or more images.. It is a self calibration technique and called automatic camera tracking
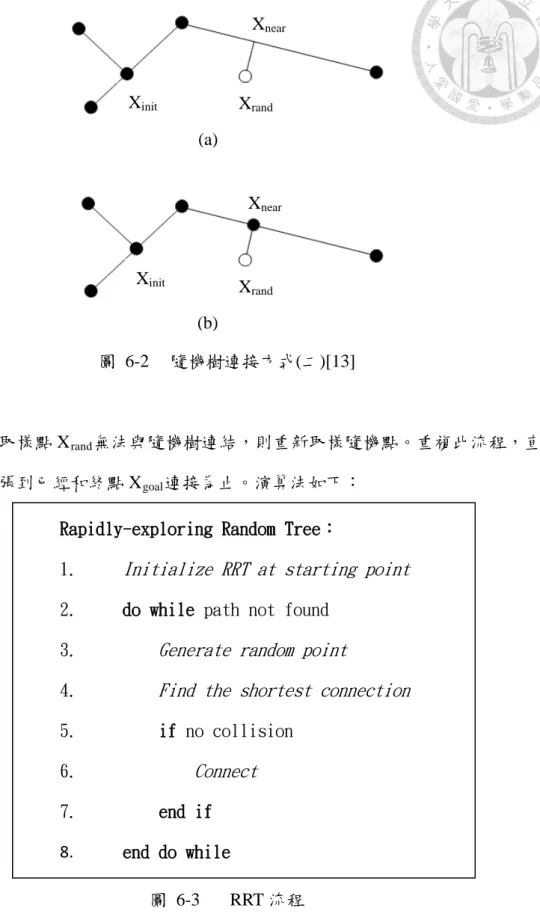
We will design a simple and effective iterative algorithm to implement “The parallel Tower of Hanoi problem”, and prove its moving is an optimal
3 recommender systems were proposed in this study, the first is combining GPS and then according to the distance to recommend the appropriate house, the user preference is used
