使用移動錨節點結合指向性天線的無線感測網路定位系統實作
51
0
0
全文
(2) 使用移動錨節點結合指向性天線的無線感測網路 定位系統實作 研究生:凃俊瑜. 指導教授:歐家和. 摘要 感測器定位是無線感測網路(WSNs)的重要議題之一,許多應用上都需要 知道感測器的位置,雖然現階段已經有許多的使用移動錨節點的定位方法已經被 提出,但這些方法都沒有結合具有方向性的傳輸範圍,因此,本論文提出了無線 感測網路中使用移動錨節點(Mobile Anchor Node)結合指向性天線的定位系統。 在定位系統中,移動錨節點沿著 X 軸移動並且使指向性天線對準垂直 X 軸的方 向發送 X 軸的座標資訊與沿著 Y 軸移動並且使用指性向天線對準垂直 Y 軸的方 向發送 Y 軸的座標資訊,當感測器節點利用接收到移動錨節點的 X 軸與 Y 軸的 座標進行簡單的數學運算後,感測器節點則可得到自己的估測座標。在實際環境 中量測得到的結果中,我們先測量定位系統中使用的指向性天線的傳輸角度與訊 號強度,並分析定位系統中移動錨節點傳送封包的頻率,我們從實驗數據分析的 結果得到我們的定位系統能達到平均小於 5 m 的誤差。 關鍵字:無線感測網路,移動錨節點,定位系統。. i.
(3) An Implementation of Sensor Network Localization System Using A Mobile Anchor with A Directional Antenna Chun-Yu Tu. Department of Computer Science & Information Engineering National Pingtung Institute of Commerce. Abstract. Localization of sensor nodes is an important issue in the study of wireless sensor networks (WSNs). To know the locations of the sensors in the WSNs is an open issue in many real-world applications. There are several proposed mobile anchor node localization methods, but none of them combines with the directional antennas. Therefore, we propose a positioning system which using a mobile anchor node in WSNs with a directional antenna. In the system, the node can move along with X-axis and Y-axis, and sends the coordinate packet to the sensor via the directional antenna simultaneously. Sensor node could estimate the coordinate by simple mathematical operations by receiving the X-axis and Y-axis packets from the mobile anchor node. In the experimental results of the real-world environmental measurements, we measure the angle and range of transmission from the directional antenna. The results show that the average location error of the proposed system could achieves an accuracy of 5 m. Keyword: wireless sensor networks, mobile anchor node, positioning system.. ii.
(4) 誌謝. 在研究所求學的這段時間,首先我最要感謝的人是我的指導教授 歐家和老師,在老師兩年的指導下,讓我學習到許多的知識和做事情 的方法;而在研究方面,時時提醒我正確的學習觀念以及做研究的態 度,在研究方向產生問題時給予我最大的幫助,使我受益良多,僅此 致上最誠摯的感謝。再來要感謝本論文口詴委員張文智教授趙志峯教 授,感謝兩位老師撥出您寶貴的時間來參與口詴並在論文上給予最寶 貴的建議與指導,在此由衷感謝。 另外要感謝的是林書漢同學以及何維璞學弟與洪義發學弟,感謝 你們為了我的實驗不求回報的付出了這麼多的心力,以及其他一起學 習的同學們,還有學長與學弟妹們不時的鼓勵與打氣,讓我時常感受 到無限的溫暖與歡樂,十分開心這兩年可以跟你們互相勉勵成長。 最後感謝我的家人,這些年來一直在背後默默的支持我,讓我可 以無後顧之憂地完成碩士學業,並且將此份榮耀和喜悅獻給一直以來 關切我的所有人。. iii.
(5) 目錄. 摘要............................................................................................................. i Abstract ...................................................................................................... ii 誌謝........................................................................................................... iii 目錄........................................................................................................... iv 圖目錄....................................................................................................... vi 表目錄..................................................................................................... viii 一、緒論.....................................................................................................1 1.1 研究背景 .....................................................................................1 1.2 研究動機 .....................................................................................1 1.3 論文架構 .....................................................................................3 二、相關研究.............................................................................................4 2.1 Range-based ..................................................................................4 2.1.1 RADAR .............................................................................4 2.1.2 APS Using AOA(APSAOA) ........................................5 2.1.3 RSSI Using Mobile Anchor(RSSIUMA) .....................5 2.2 Range-free .....................................................................................6 2.2.1 Centroid .............................................................................6 2.2.2 Perpendicular Bisector of a Chord Conjecture (PBCC) .....................................................................................................7 iv.
(6) 三、無線感測網路定位系統 ....................................................................9 3.1 介紹..............................................................................................9 3.2 定位系統中的感測器節點 .......................................................10 3.3 定位系統中的移動錨節點 ....................................................... 11 3.4 定位系統設定 ...........................................................................17 四、定位系統效能評估 ..........................................................................22 4.1 座標系統實測設定 ...................................................................22 4.2 系統實測結果 ...........................................................................23 4.2.1 指向性天線的傳輸範圍 ................................................24 4.2.2 指向性天線傳輸範圍中的 RSSI 數值 ..........................27 4.2.3 定位系統的誤差值量測 ................................................30 4.2.4 移動錨節點結合自訂座標系統 ....................................31 4.2.5 定位封包發送頻率對誤差值的影響 ............................32 4.2.6 封包中間值比率對誤差值的影響 ................................33 五、結論與未來展望 ..............................................................................35 參考文獻...................................................................................................36. v.
(7) 圖目錄. 圖 3-1 接收端感測器之架構 ..................................................................10 圖 3-2 實測中使用的指向性天線 ..........................................................12 圖 3-3 無線傳輸模組裝置指向性天線 ..................................................12 圖 3-4 實驗中使用到的無線傳感器模組 ..............................................14 圖 3-5 指向性天線的(水平、垂直)傳輸範圍 ..................................15 圖 3-6 移動錨節點結合自訂座標系統之架構 ......................................16 圖 3-7 Beacon 的儲存格式 ......................................................................19 圖 4-1 實際量測的環境 ..........................................................................22 圖 4-2 自訂座標系統 ..............................................................................23 圖 4-3 固定的指向性天線 ......................................................................24 圖 4-4 三角形邊與角的關係配置 ..........................................................25 圖 4-5 實測中指向性天線的傳輸角度 ..................................................26 圖 4-6 距離 Sensor Node 50 m 的 RSSI 數值 ........................................28 圖 4-7 距離 Sensor Node 100 m 的 RSSI 數值 ......................................29 圖 4-8 移動錨節點結合自訂座標系統之定位誤差值 ..........................31 圖 4-9 定位系統的三種演算法平均誤差與最大誤差 ..........................32 vi.
(8) 圖 4-10 更改發送間隔為 2,4,6,8(Sec) ....................................33 圖 4-11 總 Beacon 封包的中間 33、66、100(percent) ...................34. vii.
(9) 表目錄. 表 4-1 實測參數 .......................................................................................30. viii.
(10) 一、緒論. 1.1 研究背景 近期在無線通信的進步和硬體技術的發展之下,研發出無線感測器網 路(WSNs)系統來對各種各樣的感測監控作出應用,這個系統使用感測 器節點來感測環境的資訊,其中包括了環境監測、災害救助、工地保安、 醫療診斷、戰場監視 [1]。. 1.2 研究動機 在 WSNs 中,每個感測器節點都必須準確的知道自己的位置。然而全 球定位系統(GPS) [2]是其中最著名而且被廣泛使用的定位技術。 在一個大規模的 WSNs 中,要讓每一個傳感器都裝置含有 GPS 定位 系統是很昂貴的,為了降低無線感測器網路系統成本的消耗,有許多無 線感測器節點定位的方法被提出,並且互相比較準確度。 被提出的定位方法像是,Time of Arrival (TOA)、Time Difference of Arrival (TDOA) 、Angle of Arrival (AOA) 、還有 Received Signal Strength Indicator (RSSI)的方法。 而無線感測器網路定位的方法分為 Range-based 與 Range-free 兩種, 1.
(11) Range-based 是一種經由求得精確距離和角度的資訊來判定估算位置的方 法 [3]-[8],Range-based 這種類型的定位方法能得到相當高的精確度,但 這類型的定位方法要求每一個感測器節點需要配備額外的硬件來得到特 定的資訊,這些裝置當然也增加了系統的成本。 Range-free 方法定位的精確度較低,但是 Range-free 方法不需要裝置 額外的硬體來取得特定的資訊 [9]-[13]。 雖然大部分的定位機制提出來協助感測器節點定位的錨節點,都使用 固定的錨節點(Fixed Anchor Nodes) ,而為了降低無線感測器網路部署的 成本,一些研究建議使用移動錨節點(Mobile Anchor Node),利用節點 一邊移動並且按照特定的規則來發送封包,當一般的感測器節點收到這 些由 Mobile Anchor Node 發送過來的位置訊號時,分析計算從這些 Mobile Anchor Node 發送過來的位置訊號,來對一般感測器節點做估測定位 [14]-[19]。 為了定位隨機散佈在一個二維座標系統的靜態傳感器節點,本實驗提 出了一種使用Mobile Anchor Node的定位系統,而我們所提出的定位系統 是讓Mobile Anchor Node裝置指向性天線,使Mobile Anchor Node的傳輸 範圍,由原本全方向性的發送定位封包,經過將天線由全向性天線改裝 為指向性天線之後,變成只對指向性天線面對的方向發送定位封包,當. 2.
(12) Mobile Anchor Node的傳輸範圍改變之後,再進行對靜態感測器節點的X 軸以及Y軸作定位,當感測器節點同時得到了X軸數值以及Y軸數值,則 得到此靜態感測器節點的座標位置定位。 本論文將使用一些基本的演算法,來處理感測器節點由Mobile Anchor Node收到的定位封包,每個感測器節點經由這些演算法來計算自己的座 標位置。 而最重要的是本論文所提出的定位準確度,由最後的實際測量數據可以 看出本論文所提出之定位系統,能達到平均小於5 m的誤差。. 1.3 論文架構 本論文架構如下:第二章討論了其它的相關研究,敘述 使用 Range-based 和 Range-free 定位的方法;第三章先對系統的環境和元件作 基本的描述說明,再各別描述本實驗中用來接收定位封包的感測器節 點,與我們用來發送定位封包的 Mobile Anchor Node,在此章節的最後描 述了我們所使用到的定位估測值演算法;第四章為實測分析與效能的評 估;最後第五章為結論與未來發展。. 3.
(13) 二、相關研究. 2.1 Range-based 關於 WSNs 有相當多為 Range-based 的定位方法,而 Range-based 的 方法必須要使用精確的距離或角度的資訊來定位。 方法分為: 訊號傳播時間(Time of Arrival,簡稱 TOA) 聲波和無線電波訊號傳播的時間差(Time Difference of Arrival,簡稱 TDOA) 點之間的角度(Angle of Arrival,簡稱 AOA) 接收到的訊號強度(Received Signal Strength Indicator,簡稱 RSSI). 2.1.1 RADAR RADAR 為由 Paramvir Bahl、Venkata N. Padmanabhan,在 [3]所提出 的定位方法,為 Range-based 中使用 RSSI 來估算位置的方法,此方法須 要在一個區域放置多個基地台來記錄並且處理 RSSI 的資訊,然後利用一. 4.
(14) 些之前測量的經驗來決定感測器的位置,由於基地台與感測器節點之間 距離是完全利用訊號強度來估算的,所以測量 RSSI 的儀器必須有非常高 的精確度。. 2.1.2 APS Using AOA(APSAOA) APSAOA 為由 Dragos、Niculescu、Badri Nath,在 [5]所提出的定位 方法,為 Range-based 中使用 AOA 來估算位置的方法,一般而言不論是 感測器或者是定位裝置,每一個感測器節點發送的無線電範圍應該為一 個圓,APSAOA 中假設每一個感測器節點都有一個主要的方向,若是此 方向一直往順時針或逆時針轉動,求出由初始位置轉動多少角度,可以 達到跟另外兩個點發送訊息,就可以利用這兩角度來求出以自己為頂點 與這兩點所形成的角度,而利用此角度資訊與定位裝置之間的距離感測 器即可估算出自己的位置來。. 2.1.3 RSSI Using Mobile Anchor(RSSIUMA) RSSIUMA 為由 Mihail L. Sichitiu、 Vaidyanathan Ramadurai,在 [17] 所提出的定位方法,為 Range-based 中使用 RSSI 來估算位置的方法,此 方法使用定位裝置不斷的在散佈了感測器節點的感測區域裡面移動,並 5.
(15) 且不斷的發送自己的位置座標,當感測器節點接收到用來定位的移動錨 節點(Mobile Anchor)所發送的訊號時,從收到的訊號強度,來判斷和 移動錨節點發送訊號位置之間的距離,以此距離為半徑,移動錨節點發 送訊號的位置為圓心,形成一個圓,當行動定位裝置不斷移動形成了許 多類似的圓,則感測器節點估測以這些圓交集區域的中心位置為自己的 位置。. 2.2 Range-free 本小節討論兩種 Range-free 定位的策略,不需要利用額外昂貴的設備 來求得距離和角度資訊。. 2.2.1 Centroid Centroid 為由 Nirupama Bulusu、John Heidemann、Deborah Estrin, 在 [9]提出的方法。 _. 而這個方法分為三個假設:. 感測器節點的傳輸範圍為完美的球體. 所有感測器節點傳播範圍相同 6.
(16) 所有感測器節點發送同步的訊號 在 WSNs 中裡有著許多可以知道自己位置的參考點,並且參考點週期 性的發送含有自己位置的封包訊號,而參考點相當於定位裝置,假設這 些點被標記為 R1 到 Rn,而 R1 到 Rn 相對應的位置為(X1,Y1)到(Xn, Yn), n 為感測器收集訊號的門檻值,當參考點達到門檻值,則對所有參考點取 加總平均來計算出感測器的估測位置,而如果在單位面積裡有越多的參 考點,則求出的位置越準確。. 2.2.2 Perpendicular Bisector of a Chord Conjecture (PBCC) PBCC 為由 Kuo-Feng Ssu、Chia-Ho Ou、Christine Jiau,在 [19]提出 的的方法,為無線感測器網路中使用移動錨節點(Mobile Anchor)來幫 助感測器節點定位的方法,定位的方法將感測器節點和行動定位裝置的 最大通訊距離,設定為一個圓的半徑,而圓的圓心為感測器節點,若能 找到圓上三個點的座標,即可求得圓上兩條不平行的弦,計算兩條弦的 中垂線相交的圓心,即為感測器節點的估測位置。而此方法需要移動錨 節點週期性的發送的訊息有: 行動定位裝置的 ID 發送訊號時的位置 7.
(17) 發送訊號時的時間 當感測器節點第一次收到移動錨節點發送過來的訊息時,感測器節點記 錄訊息上的位置為參考點,把移動錨節點的 ID 和發送訊號的時間加入一 個資料表中,利用資料表中的由此移動錨節點收到的封包間隔時間,用 來估算下一次收到封包的時間,若到達下一次收到封包的時間尚未收到 訊息,則把最後一個收到的訊息作為另一個參考節點,而當感測器節點 記錄了三個以上的參考節點時,可形成圓上兩條不平行的弦,計算兩條 弦的中垂線交點為感測器估測位置。. 8.
(18) 三、無線感測網路定位系統. 本章的第一節我們作出無線感測器網路的簡介,而第二節對本實驗的 接收端感測器作詳細說明,第三節描述本實驗的移動錨節點,而第四小 節將說明整個感測器定位系統,描述完封包接收的狀況之後,再提出定 位演算法讓後端伺服器,進行定位的分析。. 3.1 介紹 本論文所使用到的定位系統使用 Crossbow 公司 [20](與美國柏克萊 大學產學合作的公司)所研發出來的無線感測器網路開發模組,而其感 測器中的無線收發模組晶片依循著 IEEE 802.15.4(一個為了低能耗、短 距離傳輸的無線設備而產生的通訊協定)的無線網路通訊協定來設計, 並且配合美國柏克萊大學為了小型無線通訊設備所開發的作業系統 TinyOS(專門為了有無線通訊能力的小型嵌入式裝置,所設計的作業系 統)還有一些感測模組,來完成整個無線感測器網路定位系統的實作。. 9.
(19) 3.2 定位系統中的感測器節點 本論文所提出的利用移動定位節點結合指向性天線的無線感測器網 路定位系統,系統中的節點分別為用來幫助定位的移動定位節點,以及 一般的接收端感測器(Sensor Node),本系統使用Crossbow公司所開發出的 IRIS 2.4GHz Wireless Modules [20]。 本實驗的Sensor Node接收資料的流程架構如下圖3-1,為了要讓我們 的Notebook連接到Sensor Node,需要使用到Crossbow公司所開發出來的 MIB520 Gateway [20],當MIB520 Gateway經由IRIS 2.4GHz Wireless Modules接收到資料並且發送到Notebook的資料庫儲存後,由Notebook執 行定位演算法計算得出Sensor Node的位置資訊。. 圖3-1 接收端感測器之架構. 10.
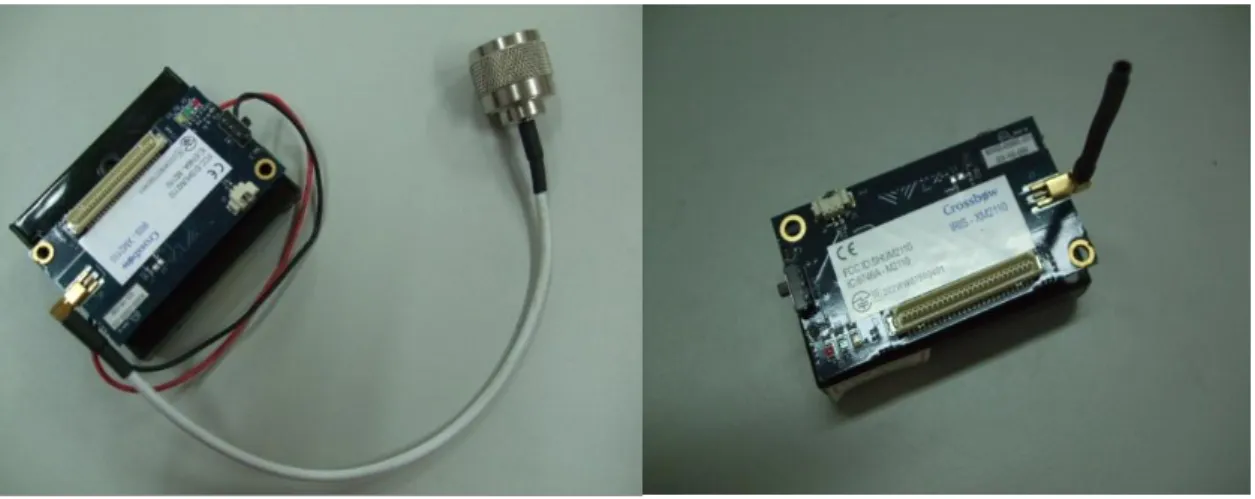
(20) 3.3 定位系統中的移動錨節點 我們提出的定位方法需要移動錨節點(Mobile Anchor Node)將自己 的座標告知接收端感測器。 我們利用了指向性天線的傳輸範圍具有方向性之特性,使用 Mobile Anchor Node 額外裝置指向性天線,對著指向性天線發送的方向送出自己 的座標資訊,希望可以藉由指向性天線具有方向性的傳輸範圍,分別對 二維歐基里德座標系統中的 X 軸與 Y 軸作出分析定位,由我們提出的理 論可以判定本實驗使用的指向性天線需要有穩定的傳輸範圍。 為了使 Mobile Anchor Node 的傳輸範圍由全向性變為指向性,所以我 們將 Mobile Anchor Node 上面預設的全向性天線改裝為指向性天線,而 我們使用的指向性天線為 SmartAnt 公司 High Gain Directional Grid Antenna for 2400-2500 MHz 的產品,產品的名稱為 SAA04-053660 [24], 下圖 3-2(a)為我們使用的指向性天線,而圖 3-2(b)為我們使用的指 向性天線之規格說明。. 11.
(21) (a)SAA04-053660. (b)Specification of. Directional. Directional Antenna. Grid. Antenna for 2.4 GHz 圖3-2 實測中使用的指向性天線[21]. 我們將原本 IRIS 2.4GHz Wireless Modules 上面的全向性天線接頭 MMCX-Female Connector 轉為指向性天線的接頭 N-Female Connector,之 後再由 N-Female Connector 連結到我們的指向性天線如圖 3-3 所示。. 圖3-3 無線傳輸模組裝置指向性天線. 12.
(22) 由於天線傳輸的角度與發送訊號的穩定性與實驗定位的精確度息息 相關,如果指向性天線的傳送訊號功率不足,不僅僅會使我們的指向性 天線發送角度無法收斂,也會使我們的發送訊號不穩定,而為了得到指 向性天線最穩定的傳輸範圍,我們將功率傳輸範圍介於 3.2dBm 到-17dBm 的數值,調整至傳輸功率最大的 3.2dBm。 另外我們將原本使用 1.5V*2 的電池盒改裝為 1.5V*3 的電池盒來達到 IRIS 2.4GHz Wireless Modules 所能到達的最高電壓 3.6V,用來提升傳送 定位封包的穩定性,而圖 3-4 是我們的為了讓 Mobile Anchor Node 穩定傳 送封包而改裝的 IRIS 2.4GHz Wireless Modules 與一般接收端使用的 IRIS 2.4GHz Wireless Modules 對照圖,圖 3-4(a)為 Mobile Anchor Node 的 IRIS 2.4GHz Wireless Modules,而圖 3-4(b)為一般的接收端使用的 IRIS 2.4GHz Wireless Modules。. 13.
(23) (a)移動錨節點所使用的. (b)接收端所使用的 IRIS. IRIS 2.4GHz Wireless. 2.4GHz Wireless Modules. Modules 圖 3-4 實驗中使用到的無線傳感器模組. 指向性天線的傳輸方式也會影響 Mobile Anchor Node 的傳輸角度,依 照傳輸的方式的不同,我們也會得到不同的傳輸角度,圖 3-5(a)顯示 當天線水平傳輸時指向性天線的傳輸範圍大約為 13˚,而圖 3-5(b)顯示 垂直傳輸時傳輸範圍大約為 7˚。. 14.
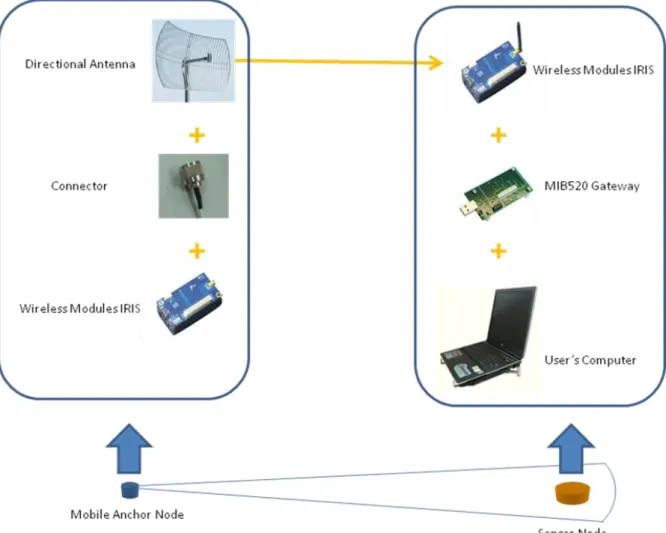
(24) (a). ( b ) V-plane Co-polarization. H-plane Co-polarization. Pattern (linear, horizontal). Pattern (linear, vertical). 圖 3-5 指向性天線的(水平、垂直)傳輸範圍[21]. 本論文提出的定位系統是使用 Mobile Anchor Node 結合自訂的座標 系統,此方法是直接將我們的感測區域劃分為一個歐基里德二維空間, 當 Mobile Anchor Node 得知自己的座標資訊之後,讓 Mobile Anchor Node 進行移動的同時週期性的發送含有自己座標資訊的封包,而當接收端感 測器收到從 Mobile Anchor Node 發送過來的封包資訊後,使用我們提出 的定位演算法,進行座標的估測值計算,而 Mobile Anchor Node 結合自 訂座標系統的架構如圖 3-6。. 15.
(25) 圖3-6 移動錨節點結合自訂座標系統之架構. 圖 3-6 為我們的定位系統架構,圖左方為我們的 Mobile Anchor Node,我們使用 Mobile Anchor Node 結合指向性天線之後,經由指向性 天線對著指定的方向發送 Mobile Anchor Node 的座標資訊,而圖右方的 Sensor Node 將座標資訊傳送到後端的伺服器儲存,最後經由資料庫端使 用定位演算法計算出 Sensor Node 的估測值座標。. 16.
(26) 3.4 定位系統設定 本論文使用二維的歐基里德的座標系統,記錄我們所量測的實際座標 值與估測座標值,最後再使用歐基里德距離測量公式來判定實際座標與 估測座標的定位誤差值。 我們使用兩個節點作為我們的 Mobile Anchor Node,我們分別設定對 X 軸定位的 Mobile Anchor Node 與對 Y 軸定位的 Mobile Anchor Node, 將他們的 Node ID 設定為 1 與 2,當 Mobile Anchor Node 的 Node ID 為 1 時(下面以 Node ID 1 簡述) ,我們讓 Mobile Anchor Node 在沿著 X 軸移 動的同時發送封包,然而當 Mobile Anchor Node 的 Node ID 為 2 時(下 面以 Node ID 2 簡述) ,我們讓 Mobile Anchor Node 在沿著 Y 軸移動的同 時發送封包。 當 Node ID 1 沿著 X 軸移動時,我們校準在 Node ID 1 上面額外裝置 的指向性天線,使指向性天線對準垂直於 X 軸的方向來發送訊號,來對 Sensor Node 的 X 軸座標值定位,而當 Node ID 2 沿著 Y 軸移動時,我們 校準在 Node ID 2 上的指向性天線,使指向性天線對準垂直於 Y 軸的方 向發送訊號,來對 Sensor Node 的 Y 軸的座標值定位。 當 Sensor Node 同時得到 X 軸與 Y 軸的座標估測值之後,將 X 軸與 Y 軸座標結合得到我們的估測座標值 X e , Ye ,最後再經由下面提出的演算. 17.
(27) 法來計算接收端感測器的座標估測位置。 定位系統中的Mobile Anchor Node會定期的發送Beacon封包,其 Beacon封包包含的資訊有: Mobile Anchor Node發送的時間包含RSSI Mobile Anchor Node的Node ID與座標位置 我們定義的Beacon封包接收的環境如圖3-7,我們可以將Sensor Node 所接收到的X軸定位訊號記為序列 Bi X X p | p 1, . . , N X ,變數 X p 為由 Node ID 1發送出來對Sensor Node作X軸定位的封包, p 為封包的計數變 數,N X 為Sensor Node從Node ID 1收到的總封包數,Sensor Node接收Node ID 1發送封包的環境如圖3-7(a),而Sensor Node接收到的Y軸定位訊號 記為序列 BiY Yq | q 1, . . , NY ,變數 Yq 為由Node ID 2發送出來對Sensor Node作Y軸定位的封包,而 q 為封包的計數變數,NY 為Sensor Node從Node ID 2收到的總封包數,Sensor Node接收Node ID 2發送封包的環境如圖3-8 (b)。. 18.
(28) (a) X軸接收到的封包格式. (b)Y 軸接收到的封包格式. 圖3-7 Beacon的儲存格式. 我們對感測器收到的 Bi X 、 BiY 封包進行三種演算法的計算,來得到我 們的座標定位估測值。 以下為我們使用的三種演算法: (1)平均值(AVG) 我們對Node ID 1發送過來的每一個封包由 X 1 到 X N 取加總值,之後將 X 1 到 X N 的總和除以X軸封包總數 N 之後取其平均值 X avg ,當收到封包是. 由Node ID 2送出的,則我們把 Y1 到 YN 取加總值,之後將 Y1 到 YN 的總和除 以Y軸封包總數 N 取其平均值 Yavg ,最後得到 X avg , Yavg 為我們的平均值估 測值,而平均值的演算法如下(3-1)所示:. 1 X , Y avg avg N . Nx. 1 X , p N P 1. Y q q 1 Ny. 19. (3-1).
(29) (2)RSSI最大值(RSSI) 每當Sensor Node一個接收到的Beacon封包,都可以由Beacon封包取得 RSSI數值,而當RSSI數值越大表示Sensor Node收到的封包訊號強度越 大,通常是越接近中間的感測角度或者是距離越接近Mobile Anchor Node 所接收到的RSSI數值會越大。當我們收到封包來自於Node ID 1時,我們 將封包 X 1 到 X N 進行RSSI最大值的比較,之後將X軸的RSSI最大值取出並 且儲存其位置 P 到 X RSSI _ MAX ,之後以 X RSSI _ MAX 位置的X軸座標為RSSI訊號強 度最大的X軸座標位置 X RSSI ,而當我們收到封包來自於Node ID 2時,我 們將封包 Y1 到 YN 的封包進行RSSI最大值的比較,並且儲存其位置 q 到 YRSSI _ MAX ,再以 YRSSI_ MAX 位置作為RSSI訊號強度最大的Y軸座標位置作為. Yrssi ,以 X rssi , Yrssi 為RSSI最大值方法的估測值,其座標位置演算法如下列. (3-2)所示: X RSSI _ MAX 0;. YRSSI _ MAX 0;. if ( RSSI ( p[1:N x ]) X RSSI _ MAX ){. if ( RSSI ( q[1:Ny ]) YRSSI _ MAX ){. X RSSI _ MAX RSSI p ;. YRSSI _ MAX RSSI q ;. RSSI _ MAX p;}. RSSI _ MAX q;}. X RSSI , YRSSI X X. RSSI _ MAX. , YYRSSI _ MAX. . (3-2). 20.
(30) (3)中值(MED) 我們使用的中值演算法為了去掉過大或過小的雜訊值,當發送封包的 是Node ID 1,則我們將第 12Nx 個收到的封包記為封包數量的中值,以 X med 記錄其座標位置,然而發送封包的是Node ID 2,則將第 12Ny 個收到的封包 記為封包數量的中值,以 Ymed 記錄其座標位置,以 X med , Ymed 為我們所使用 的中值演算法座標估測值,中值演算法如(3-3)示:. X , Y X , Y med med 1 Nx 1 Ny 2 2. (3-3). 21.
(31) 四、定位系統效能評估. 在環境的設置中,我們為了避免各種電磁波的干擾狀況發生,像是電 磁波的散射、繞射、反射之類的現象都會影響實驗結果的精確度,所以 我們選擇了一個廣大的草原來實測,以下是實測環境圖. 圖4-1 實際量測的環境. 4.1 座標系統實測設定 本篇論文為使用移動錨節點(Mobile Anchor Node)結合自訂座標系 的定位系統,我們使用 Mobile Anchor Node 傳送自訂的座標資訊來為實 測中的感測器(Sensor Node)定位,而本篇論文的自訂座標系統則是把 實驗的區域使用尺規測量出兩條垂直的直線,以其中一條作為 X 軸,而 22.
(32) 另外一條作為 Y 軸,每一單位以公尺(m)計量,再將 Sensor Node 設置 在自訂座標(100,100)的位置,當 Sensor Node 收到從 Mobile Anchor Node 發送過來的封包訊號之後,記錄每個封包訊息與發送封包時的座標位 置,之後再按照收到封包的時間點將記錄下來的座標位置與封包結合, 而本論文的自訂座標系統如圖 4-2 表示:. 圖4-2 自訂座標系統. 4.2 系統實測結果 首先我們進行對指向性天線傳輸範圍的實測,之後偵測天線傳輸範圍 中距離對 RSSI 數值的變化,得到了以上兩種方法的實測數據之後,我們 進行本論文所提出的定位作法之實測與分析。. 23.
(33) 4.2.1 指向性天線的傳輸範圍 實測中為了避免有人為的偏移誤差,我們先將指向性天線架設在一個 固定的平台,並且使指向性天線對準固定的方向如圖 4-3 所示:. 圖4-3 固定的指向性天線. 在我們量測的過程中,我們使用皮尺往指向性天線對準的方向拉出 300 m 距離的參考線,然後再分別對 30 m、100 m、以及 300 m 的位置, 進行指向性天線訊號傳輸角度的測詴,實驗中我們使用 Sensor Node 在參 考線的垂直方向移動,記錄下當 Sensor Node 距離 Mobile Anchor Node 30 m、100 m、300 m 時,Sensor Node 能收到的封包訊號邊界位置,再由邊 界位置以皮尺拉出參考線回到原點,來記錄邊界位置與原點的距離,經 過以上的實測,我們實驗量測出三角型的三邊長度,最後我們由餘弦定 理求得指向性天線在 30 m、100 m、300 m 時個別的傳輸範圍,圖 4-4 為 餘弦定理的與三邊長的關係,設定三角型的 BC 角拉出的邊長為 A 角所 24.
(34) 映射的 a 邊,AC 角拉出的邊長為 B 角所映射的 b 邊,AB 角拉出的邊長 為 C 角所映射的 c 邊。. 圖4-4 三角形邊與角的關係配置. 假設我們今天想要計算 C 角的角度,則我們以餘弦定理得 C 角之角 度,使用的餘弦定理公式如下:. a 2 b2 c2 cos C 2ab . (4-1). 而我們實測的得到的指向性天線訊號傳輸角度以圖 4-5 表示:. 25.
(35) 圖4-5 實測中指向性天線的傳輸角度. 從我們量測出來的結果來看,當距離原點 30 m 時傳輸角度為 98 ˚, 此時還在沒有到達圖 3-5 天線理論值的傳輸角度,當距離 100 m 時傳輸角 度為 17˚,已經漸漸達到到天線使用規格的傳輸角度,當到 300 m 的時候 傳輸角度為 12.5˚為最接近天線使用規格的傳輸角度,雖然 Mobile Anchor Node 距離 Sensor Node 到達 300 m 時,傳輸角度最為接近天線規格中的 角度,但是 Sensor Node 與 Mobile Anchor Node 距離到達 300 m 將會很容 易出現封包遺失的問題,所以為了接收封包的穩定性,我們決定使用 100 m 的傳輸距離來作為我們定位的實測距離。. 26.
(36) 4.2.2 指向性天線傳輸範圍中的 RSSI 數值 接下來對指向性天線在移動中的 RSSI 數值作實測,我們由距離原點 50 m 與 100 m 的位置來量測天線的 RSSI 數值與角度和量測距離的增減 狀況,而圖 4-6 為 50 m 的量測狀況,圖 4-7 為 100 m 的量測狀況,我們 使用的傳輸模組規格中說明 RSSI 的數值會介於 0 到 53,但是由於我們對 天線、傳輸功率以及電壓的修改,我們記錄下 RSSI 的數值僅介於 0 到 47 之間。 本實驗為量測 Mobile Anchor Node 結合指向性天線傳輸範圍中各點 的 RSSI 數值變動的實測,我們先將接收端固定在原點接收封包,我們將 此原點設定為(0,0) ,實測中先讓 Mobile Anchor Node 由(50,25)令 指向性天線面向平行於 X 軸的方向,並且在移動到(50,-25)的同時發 送封包,接收端這個移動期間的 RSSI 數值變化如圖 4-6 所示,之後我們 實測 Mobile Anchor Node 由(100,15)讓指向性天線對著平行於 X 軸的 方向移動到(100,-15),在移動的同時發送封包來紀錄 RSSI 數值的變 化情形如圖 4-7 所表示. 27.
(37) 圖4-6 距離Sensor Node 50 m的RSSI數值. 由圖 4-6 可以看出 Mobile Anchor Node 與 Sensor Node 距離為 50 m 時 的情形,當 Mobile Anchor Node 移動到(50,25)與(50,-25)遠處時, 其 RSSI 數值約為 3 到 7,此時 Mobile Anchor Node 與 Sensor Node 距離 約為 56 m,而收到的 RSSI 數值最大值約 33 為 Mobile Anchor Node 在中 心點發送時的數據,此時 Mobile Anchor Node 與 Sensor Node 距離約為 50 m。. 28.
(38) 圖4-7 距離Sensor Node 100 m的RSSI數值. 從圖 4-7 來判斷 Mobile Anchor Node 與 Sensor Node 距離 100 m 時的 情形,當 Mobile Anchor Node 放置在與 Sensor Node 直線距離 100 m 位 置的之後,使 Mobile Anchor Node 對 Sensor Node 發送可以得到的 RSSI 最大數值約為 23 到 27,而往左右各別移動到(100,15)與(100,-15) 時的 RSSI 數值約為 0~5,此時的 Mobile Anchor Node 與 Sensor Node 的 距離約為 102 m。 從實驗的結果可以看出當指向性天線越靠近中心點發送訊號,或者距 離越近發送訊號,RSSI 的數值就越大,並且得知角度影響 RSSI 的數值 遠大於距離所影響的,因此我們將 RSSI 最大數值作為一種我們定位估測 的演算法。 29.
(39) 4.2.3 定位系統的誤差值量測 本篇論文使用歐基里德距離公式計算我們的實際座標值跟我們的估 測值座標差距,而Sensor Node的實際座標值以 X r , Yr 表示,另外將本實 驗的估測座標設為Sensor Node的估測座標以 X e , Ye 表示,以下是歐基里 德距離公式演算法:. Localization _ error (Xe-Xr)2 +(Ye-Yr)2. (4-2). 而當我們完成我們的定位實測之後,我們經由更改 Beacon 封包發送 的頻率、接收端用來計算的 Beacon 封包數量,分別觀察發送頻率在 2、4、 6、8 秒、與取全部封包的中間值 33%、66%、100%的時候,進行定位的 準確值分析,表 4-1 為我們的參數表。 表 4-1 實測參數 Parameter. Value. Beacon interval (v). (2)、4、6、8 (sec). Median of beacon (percent). 33、66、(100) (percent). 30.
(40) 4.2.4 移動錨節點結合自訂座標系統 圖 4-8 是對於自訂座標系,使用接收端收到的 100 筆 X 軸數據,與 100 筆 Y 軸數據結合出來的 100 筆座標估測值,使用 AVG、MED、RSSI 三種演算法分別計算他們精確度所得到的分析圖,而圖 4-9 為定位系統三 種演算法的平均值誤差與最大值誤差。 從圖 4-8 可以看出 RSSI 由於有移動時指向性天線角度偏移的問題, 此問題主要來自於人為誤差,我們帶著指向性天線移動的時候會有一定 的擺動,距離越遠則影響越明顯,從分析的結果可以看出 AVG 會比 MED 的方法更為精確,並且 AVG 與 MED 的誤差值都明顯的比 RSSI 更準確。. 圖4-8 移動錨節點結合自訂座標系統之定位誤差值 31.
(41) 圖4-9 定位系統的三種演算法平均誤差與最大誤差. 從圖 4-9 可以看出三種演算法 AVG、MED、RSSI 的平均誤差值分別 為 3.07、4.00、7.90,而這 100 筆實測數據使用 AVG、MED、RSSI 得到 的最大誤差分別為 8.94、8.94、16.16。. 4.2.5 定位封包發送頻率對誤差值的影響 我們實測修改封包的發送頻率對精確度的影響,圖 4-10 是我們將發 送封包頻率個別更改為 2~8 秒的結果。圖 4-10 統合分析了附錄 A 中. 32.
(42) Interval 由 2sec 到 8sec 的曲線圖得出的結果,每一個標記點是每種頻率 測量的 100 筆數據其誤差值平均值。. 圖4-10 更改發送間隔為 2,4,6,8(Sec). 圖 4-10 數據結果顯示出,對於封包發送的間隔時間越大,則座標值 估測的最大誤差值與最小誤差值相差將會越大,然而由於誤差值的起伏 較大,所以封包發送的間隔時間越大,定位的誤差也就越大。. 4.2.6 封包中間值比率對誤差值的影響 我們發現接收端收到的所有 Beacon 封包中,越鄰近封包中間值所收 到的 Beacon 封包數值會越正確,所以我們提出使用全部 Beacon 封包中. 33.
(43) 間 33%、66%、100%的封包進行 AVG、MED、RSSI 三種演算法的分析, 圖 4-11 為我們的分析附錄 B 中取總 Beacon 封包中間 33%、66%、100% 的封包數得到的結果。. 圖4-11 總Beacon封包的中間33、66、100(percent). 圖 4-11 的數據結果顯示出,當我們使用越接近中間值的封包來進行 誤差值的運算時,三種估測方式的誤差值都會相對的降低,而 AVG 方法 是三種演算法中誤差值最低的,其平均誤差值達到 1.95 m。. 34.
(44) 五、結論與未來展望. 本論文提出在無線感測網路中 Range-free 的移動錨節點定位系統, 我們使用移動錨節點裝置指向性天線,針對指向性天線傳輸範圍具有方 向性的特性,移動錨節點沿著二維座標中的 X 軸發送 X 軸的座標封包與 沿著 Y 軸移動發送 Y 軸的座標封包,當感測器節點透過得到移動錨節點 的 X 軸與 Y 軸的座標進行簡單的數學運算後,感測器節點則可得到自己 的估測座標。我們由實際環境中評估我們所提出的定位系統之定位精確 度,實測的結果顯示我們的定位系統可以由指向性天線傳輸的角度越小 與封包傳輸的頻率越高來提升定位精確度,而我們使用 AVG、MED、RSSI 這三種演算法來計算感測器的座標,從數據顯示的結果看出 AVG 方法可 以提供較佳的精確度,其定位精確度達到平均誤差值 1.95 m。 在未來發展中,由於我們提出的定位方式使用移動錨節點沿著座標軸 進行直線的移動,之後我們將進行當移動錨節點不規則移動時指向性天 線指向固定方向的定位量測,最後我們將對本論文所提出的定位系統中 的移動錨節點進行路徑規劃。. 35.
(45) 參考文獻 [1]. I. F. Akyildiz, W. Su, Y. Sankarasubramaniam, and E. Cayirci, “A Survey on Sensor Networks,” IEEE Communications Magazine, vol. 40, no. 8,pp. 102–114, Aug. 2002.. [2]. http://3w.gfec.com.tw/service/content/gps.htm. [3]. P. Bahl and V. N. Padmanabhan, “RADAR: An In-Building RF-Based User Location and Tracking System,” in Proceedings of IEEE Joint Conference of the IEEE Computer and Communications Societies. (INFOCOM), 2000, pp. 775–784. [4]. A. Savvides, C. C. Han, and M. B. Srivastava, “Dynamic Fine-Grained Localization in Ad-Hoc Networks of Sensors,” in Proceedings of ACM International Conference on Mobile Computing and Networking. (MOBICOM), 2001, pp. 166–179. [5]. D. Niculescu and B. Nath, “Ad Hoc Positioning System (APS) Using AoA,” in Proceedings of IEEE Joint Conference of the IEEE Computer and Communications Societies (INFOCOM), 2003, pp. 1734–1743.. [6]. N. B. Priyantha, A. Chakraborty, and H. Balakrishnan, “The cricket location- support system,” in Proc. ACMInt. Conf. Mobile Computing Networking (MOBICOM), Boston, MA, Aug. 2000, pp. 32–43.. [7]. Y. Shang, W. Ruml, and Y. Zhang, “Improved MDS-based localization,” in Proc. IEEE Infocom, Hong Kong, China, March 2004.. [8]. K. Chintalapudi, A. Dhariwal, R. Govindan, and G. Sukhatme, “Ad-hoc localization using ranging and sectoring,” in Proc. of IEEE Infocom, 36.
(46) Hong Kong, China, March 2004. [9]. N. Bulusu, J. Heidemann, and D. Estrin, “GPS-less Low Cost Outdoor Localization for Very Small Devices,” IEEE Personal Communications, vol. 7, no. 5, pp. 28–34, Oct. 2000.. [10] D. Niculescu and B. Nath, “DV Based Positioning in Ad Hoc Networks,” Kluwer journal of Telecommunication Systems, vol. 22, no. 1, pp. 267– 280, Jan. 2003. [11] T. He, C. Huang, B. M. Blum, J. A. Stankovic, and T. Abdelzaher, “Range-Free Localization Schemes for Large Scale Sensor Networks,” in Proceedings of ACM International Conference on Mobile Computing and Networking (MOBICOM), 2003, pp. 81–95. [12] Chong Liu ,Kui Wu, Tian HeComputer “Sensor Localization with Ring Overlapping Based on Comparison of Received Signal Strength Indicator.” 2004 IEEE(ROCRSSI). [13] Vijayanth Vivekanandan, Vincent Wong “Concentric Anchor-Beacons (CAB) Localization for Wireless Sensor Networks . “ICC 2006. [14] C. H. Ou and Chun-Yu Tu, “Sensor Network Localization using Mobile Anchors with Directional Antennas,” MobiCom 2009.. [15] R. Ramanathan, “On the Performance of Ad Hoc Networks with Beamforming Antennas,” in Proceedings of ACM International Symposium on Mobile Ad Hoc Networking and Computing(MOBIHOC), Oct. 2001, pp. 95–105.. [16] C. H. Ou and K. F. Ssu, “Sensor Position Determination with Flying 37.
(47) Anchors in Three-dimensional Wireless Sensor Networks,” IEEE Transactions on Mobile Computing, vol. 7, no. 9, pp. 1084–1097, Sept. 2008. [17] M. L. Sichitiu and V. Ramadurai, “Localization of Wireless Sensor Networks with A Mobile Beacon,” in Proceedings of IEEE International Conference on Mobile Ad-Hoc and Sensor Systems (MASS), 2004, pp. 174–183. [18] A. Galstyan, B. Krishnamachari, K. Lerman, and S. Patterm, “Distributed Online Localization in Sensor Networks Using A Mobile Target,” in Proceedings of International Symposium on Information Processing in Sensor Networks (IPSN), 2004, pp. 61–70. [19] K. F. Ssu, C. H. Ou, and H. C. Jiau, “Localization with Mobile Anchor Points in Wireless Sensor Networks,” IEEE Transactions on Vehicular Technology, vol. 54, no. 3, pp. 1187–1197, May 2005. [20] Crossbow Company http://www.xbow.com/index.html [21] SmartAnt Telecom http://www.smartant.com/smartdesk/upload/datasheet/SAA04-053660.pd f. 38.
(48) 附錄 A. Interval 2 (sec). Interval 4 (sec). 39.
(49) Interval 6 (sec). Interval 8 (sec). 40.
(50) 附錄 B. Median of beacon 33%. Median of beacon 66%. 41.
(51) Median of beacon 100%. 42.
(52)
數據
![圖 3-5 指向性天線的(水平、垂直)傳輸範圍[21]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9011709.297567/24.892.124.786.193.622/圖35指向性天線的水平垂直傳輸範圍21.webp)
Outline
相關文件
Considering the individual differences of wireless chips, we apply the cal- ibration before reversely locating the anchor nodes to obtain the RSSI (received signal strength
Little, "Qos-enabled video streaming in wireless sensor networks." 9th IEEE International Symposium on Network Computing and Applications (NCA), pp.
Design and implementation of a single system image operating system for ad hoc networks, In Proceedings of The International Conference on Mobile Systems, Applications, and
Liu, “An adaptive mesh-based protocol for geocast routing,”Journal of Parallel and Distributed Computing: Special Issue on Routing in Mobile and Wireless Ad Hoc Networks,
“Home Networking with IEEE 802.15.4: A Developing Standard for Low-Rate Wireless Personal Area Networks,” IEEE Comm. Gutierrez, “On the use of IEEE 802.15.4 to enable wireless
Distributed clustering algorithms for data-gathering in wireless mobile sensor networks.. Ad
Ghodosi (Eds.), Proceedings of Ad-Hoc, Mobile, and Wireless Networks, Lecture Notes in Computer
Preventing Wormhole Attacks on Wireless Ad Hoc Networks: A Graph Theoretic Approach, Proceedings of 2005 IEEE Wireless Communications and Networking Conference (pp.. Mobile Ad
