國立臺中教育大學資訊科學學系碩士論文
應用單一行動錨節點於無線感測網路
非理想通道之三維定位研究
A Single Mobile Anchor Localization
Scheme in Error-prone Channel for
Three-dimensional Wireless Sensor
Networks
指導教授:李宗翰 教授
研究生:傅鈺中 撰
中華民國 一百零一 年 六 月
致謝
碩班兩年時光飛逝,首先感謝我的父母,在我大學畢業後繼續支持我,並且 讓我沒有生活煩惱的完成研究所的學業。再者,十二萬分的感謝指導教授李宗翰 老師,在進研究所的第一天就給了我相當多的研究資訊。並且為了學生努力的找 尋經費,讓學生能夠有著舒服安適的研究環境。對於研究,也非常感謝老師總是 犧牲自己的休息時間,陪著學生一起討論與研究,並且對於學生的問題都是盡全 力的回答或是尋找相關資訊答覆給學生。而在研究之餘,也非常感謝老師為研究 室添購了許多的設備,讓學生不只在理論上做探討,得以更進一步的實體操作, 並且教導學生許多的嵌入式技術與技巧,讓學生畢業後可以跟企業做銜接。還有 感謝口試委員竇其仁教授與賴坤助博士對於學生論文的指導與建議。 再來,感謝瑋辰學長、冠霖學長、益華學長、和展學長、天亮學長以及諸位 學長姐們,在學業上給我的幫助。還有帶給我休閒的玩樂,讓我在疲憊的研究之 後,可以放鬆一下心情,為往後的研究繼續努力。 最後感謝學弟們,尤其是明駿與智皓幫忙分攤了研究室的公務,還有感謝紹 源、旻遇、郁翔、柏寰以及諸位學弟們,為研究室帶來無限的歡樂,使我碩二這 一年研究室生活充滿了笑聲,而不是苦悶的。I
摘要
無線感測網路在節點定位上的應用,多數是依賴於接收訊號強度來測量訊號 發送端與接收端之間的距離。當待定位感測節點其週期性的發送 Beacon 時,負 責定位之錨節點將會基於接收到的 Beacon 進行定位。然而接收訊號的穩定性將 會對此種定位系統造成嚴重的干擾。因此在本文中提出兩種定位演算法,一為「單 一行動錨節點定位法」,二為「割線定位法」。兩者均以無線感測網路為基礎,利 用裝載 GPS 接收器之單一飛行錨節點,在三維座標系統裡動態地移動。透過接收 待定位感測節點之 Beacon,並應用數學模式計算出感測節點之位置。在單一行動 錨節點定位法,以單次移動只改變一個軸向的方式,進行定位移動與計算。模擬 結果顯示,單一行動錨節點定位法之誤差百分比僅有平均 0.04%,而割線定位法 為 1%。因此,單一行動錨節點定位法適合於具高精確度且不要求即時的應用上, 而割線定位法則適合用於較廣範圍的節點定位應用。 現實生活存在許多無線設備也是使用 2.4GHz ISM 頻段。然而,環境雜訊的 影響會導致接收訊號強度產生變化。接收訊號強度對於測距是相當重要的資訊, 測距的誤差必定會影響到定位結果。本論文針對非理想通道的環境下,以不同程 度的 Bit Error Rate 並配合不同的 Beacon Order 進行模擬研究。根據模擬分析結果顯示,對於 Beacon Order (BO)數值設定將選擇 BO=3 將達到最佳定位準確性之數 據。
II
Abstract
The Location-based service on Wireless Sensor Networks, mainly depend on the Receiver Signal Strength (RSS) to measure the distance between the sender and
receiver. The location unaware sensor nodes send beacon periodically, which are captured by anchor sensor nodes. However, it is well-known that these systems suffer
from big inaccuracy problems because of environmental changes (the ratio of anchor and target). In this thesis, two three-dimensional space-based location algorithms in wireless sensor network were introduced. The first location algorithm is “Single Mobile Anchor Location estimation algorithm” (SMAL). The second algorithm called “Secant Location Estimation Algorithm” (SLEA). Both location algorithms use single flying anchor that equipped a GPS receiver to coordinate itself position in unknown
territory. The mobile anchor node is able to calculate the accuracy position of unaware location sensor nodes through the proposed location estimation flying model in the
three-dimensional coordinate system. Simulation results show the percentage of location estimation error is around 0.04% in SMAL and 1% in SLEA. Therefore, the
SMAL applicable to high accuracy and non-real time applications. The adaptability of the SLEA scheme for the variable communication range makes it more suitable for
deployments in wide regions.
In real-life there are many wireless devices using the 2.4GHz ISM frequency
band. However, the effect of co-channel interference will cause the deviation from the actual receive signal strength. Therefore, the measuring distance error will certainly
III
affect the positioning results. In this thesis, different Bit Error Rate and adjustment Beacon Order has been investigation. Simulation results show that the SLEA scheme
will achieve the higher positioning accuracy in error-prone channel condition when the value for Beacons Order (BO) equal to 3.
Keywords: wireless sensor network, three-dimensional localization, mobile anchor,
IV
目 錄
摘要 ... I
Abstract ... II
目錄 ... IV
表目錄 ... VI
圖目錄 ... VII
第一章 簡介 ... 1
1.1 無線感測網路 ... 1 1.2 研究背景與動機 ... 3 1.3 論文架構 ... 4第二章 文獻探討 ... 6
2.1 定位演算法... 6 2.1.1 Range Based ... 62.1.1.1 Time of Arrival (TOA) ... 7
2.1.1.2 Time Difference of Arrival (TDOA) ... 8
2.1.1.3 Angle of Arrival (AOA) ... 8
2.1.1.4 Received Signal Strength Indicator (RSSI) ... 9
2.1.2 Range Free ... 10 2.2 二維定位相關研究 ... 10 2.3 三維定位相關研究 ... 13
第三章 單一行動錨節點定位法 ... 16
3.1 Freespace 信號損耗模型 ... 17 3.2 接收訊號強度 ... 20 3.3 接收靈敏度... 22 3.4 單一行動錨節點定位演算法 ... 25 3.4.1 待定位感測節點 ... 25 3.4.2 行動錨節點 ... 26V 3.4.3 測量 ... 26 3.4.4 SMAL 模擬 ... 30 3.5 SMAL 結論 ... 33
第四章 割線定位法 ... 34
4.1 割線定位演算法 ... 35 4.1.1 定位測量 ... 37 4.2 割線定位模擬... 41 4.3 Z 軸誤差修正機制 ... 46 4.4 割線定位結論... 50第五章 非理想通道訊號干擾 ... 51
5.1 何謂非理想通道 ... 51 5.1.1 異質無線通訊技術與 IEEE 802.15.4 間的同頻干擾 ... 535.1.2 IEEE 802.15.1 (Bluetooth)與 IEEE 802.15.4 間的同頻干擾 ... 54
5.1.3 IEEE 802.11-based 與 IEEE 802.15.4 通訊技術在訊號品質 對通訊錯誤率之影響 ... 54
5.2 訊號干擾對於定位影響性 ... 57
5.3 訊號干擾之割線定位結果 ... 64
第六章 結論與未來研究方向 ... 73
VI
表 目 錄
表 3-1、SMAL 模擬參數 ... 31 表 4-1、割線定位模擬參數 ... 42 表 4-2、RSSI 與傳送端至接收端之距離關係表 ... 46 表 5-1、異質無線標準比較表 ... 56 表 5-2、非理想通道定位模擬參數 ... 66VII
圖 目 錄
圖 1-1、無線感測網路架構圖 ... 2
圖 2-1、TOA 示意圖 ... 7
圖 2-2、AOA 示意圖... 9
圖 2-3、A Group of Mobil Anchor Node ... 11
圖 2-4、Mobile beacon 之移動示意圖 ... 12 圖 2-5、定位計算 ... 14 圖 2-6、定位方式示意圖 ... 15 圖 3-1、自由空間損耗模型 ... 17 圖 3-2、RSSI 與 distance 關係 ... 22 圖 3-3、可接受初始 RSSI 值分析 ... 24 圖 3-4、定位測量飛行模式 ... 27 圖 3-5、四個虛擬錨點與目標點之距離 ... 28 圖 3-6、平均距離與定位誤差關係 ... 31 圖 3-7、平均距離與誤差百分比關係 ... 32 圖 4-1、割線示意圖 ... 36 圖 4-2、割線定位演算法示意圖 ... 37 圖 4-3、割線定位演算法上視示意圖 ... 38
圖 4-4、PRR vs. RSSI at Power Level 0 dBm... 42
圖 4-5、以不同之接收訊號強度區分多組之接收訊號範圍 ... 43
圖 4-6、各級別 Beacon Interval 與連續 RSSI 參考數值所計算的定位誤差(m) .... 43
圖 4-7、各級別 Beacon Interval 與連續 RSSI 參考數值所計算的定位誤差百分比(%) ... 45
VIII 圖 4-8、修正 Z 軸後之定位誤差(m) ... 47 圖 4-9、修正 Z 軸後與原割線定位法在定位誤差值之比較 ... 48 圖 4-10、修正 Z 軸後之定位誤差百分比 ... 49 圖 5-1、IEEE 802.11b 和 IEEE802.15.4 通道選擇 ... 52 圖 5-2、Degree of Irregularity ... 57 圖 5-3、PRR-SINR 模型測量之關係圖 ... 59 圖 5-4、訊號干擾對於割線定位演算法之影響 ... 61 圖 5-5、因訊號干擾而導致封包錯誤 ... 63
圖 5-6、An example of the superframe structure ... 65
圖 5-7、訊號干擾之定位距離誤差 ... 68
圖 5-8、訊號干擾之定位誤差百分比 ... 69
圖 5-9、訊號干擾之修正後定位距離誤差 ... 70
1
第一章
簡介
1.1
無線感測網路
最早美國柏克萊大學的David Culler教授主持的研究計畫為無線感測網路的 最早發展,其被稱之為智慧灰塵[1]。然而,此設備的運用方式是藉由大量的並且 廣泛的佈建感測節點,以監控環境或是人員、動物的移動。當Sink節點透過無線 感測網路收集到相關資料後,就能建構分析得知該地區的相關狀況。一般而言, 用於環境監控之無線感測網路是利用大量的感測節點所組成。然而,散佈的方式 大多數使用隨機散佈,例如,運用飛行器將大量的感測節點散佈於森林中。這也 意味著,無線感測網路需要擁有能夠自我組織的協定與演算法的能力。而無線感 測網路的另一項特點則是合作運算,例如,一個感測節點可以利用無線傳輸收集 感測節點周邊的資訊。並且去除資訊中的相同的部分,僅保留了所有差異的部 分。將這些資訊收集完成後,再融合其資訊傳送至使用者,將可以減少資訊傳輸 所消耗的資源。 由於科技的進步,對於無線網路技術、通訊技術、嵌入式微處理器技術以及 微型製造技術的蓬勃發展。使得電子設備得以採用微型設計,使嵌入式裝置之體 積大幅縮小。而無線通訊技術的發展,也使得電子設備之間的無線通訊能力也日2
復一日的大幅提升。然而,嵌入了精密感測、通訊以及計算功能的微小電子設備,
造就了無線感測網路技術的蓬勃發展。隨著科技技術的進步,嵌入式系統已被廣
泛應用在各個領域,包括工業應用、生活與建築自動化、多媒體應用等等,這也
讓無線感測網路 (Wireless Sensor Network;WSN) 的相關研究近幾年呈現快速的
成長。 圖1-1、無線感測網路架構圖 然而,典型的無線感測網路是經由大量的感測器節點經由單跳或多跳的傳輸 方式相互溝通,再經由Sink節點負責資訊收集(圖1-1)。無線感測網路的相關研究 在最近幾年受到矚目,且此技術被大量開發在各式各樣的應用之上,例如環境監 測、軍事戰場收集資訊、遠距醫療服務、車載通訊方面、災難救援等等。因此在 如此廣泛的應用中,如何準確得知各個感測節點所在位置,對於無線感測網路也
3 是非常重要的一項資訊與研究。例如在災難救援、天然災害預警或是故障排除等 應用,除非在佈建之時已將感測節點位置加以規劃與紀錄,否則在無法得知感測 節點所在位置下,即使最後接收到感測節點回傳的感測資訊,其實用性將大幅降 低。如大型機械設備之維護[2]以及高階設備進出管理等應用,在無法紀錄感測節 點位置的情況下是無法有效運作的。然而,在許多室外定位之應用上,感測節點 配置GPS系統來輔助其定位之需求。但因無線感測網路的應用大多是以佈建或是 佈撒大量的感測節點,若是每個感測節點都配置GPS,其建置成本過高且每個感 測節點的GPS定位下均有相當程度的誤差產生,導致各感測節點間定位資訊的落 差過大,造成系統運作上的複雜度增加。
1.2
研究背景與動機
「位置探索」,從古至今人類對於此議題相當感興趣,古早在廣闊無邊的茫 茫大海,人們已發明了指南針與羅盤,為了就是找尋自己的方向。然而,隨著科 技文明進步,人們對於定位的需求越來越迫切,非但沒有因為相關技術的推陳出 新而滿足,反而後續的研究也持續地投入此一議題。對於室外定位多數使用GPS 來達成目的,但如有大量需要被定位的物品或是其他應用,使用GPS作為定位所 需設備,相對於成本是龐大的數目。因此近年來利用具低建置成本、低耗能、高 擴展性的無線感測網路於定位之用途上已越來越多,使得定位技術用於無線感測4 網路上的相關應用,已成為不可或缺的一環。因此有許多的相關研究在探討無線 感測網路的定位技術與應用。 因此,位置資訊對於無線感測網路一直以來都是相當重要的屬性,位置資訊 不僅是開起許多創新應用的開端,甚至能有效的提升無線感測網路中各式各樣協 定的機能與效能。然而在眾多的無線感測網路定位之研究,大多數的定位演算法 都是基於二維度空間進行討論。但現實生活的應用上則是以三維度空間呈現,如 天然災難監測、人員搜尋定位系統等。因此單純把二維空間的定位演算法用於三 維空間定位中是截然不同的。因此,三維空間的定位演算法是有一定的必要性。
1.3
論文架構
本論文之架構如下,第二章為相關研究之探討,第三章為單一行動錨節點定 位演算法,第四章為三維空間之割線定位演算法,第五章為訊號干擾與修正方 法,第六章為結論與未來研究方向。 在本論文的第二章中,將討論用於無線感測網路用於節點定位技術之相關研 究,並分析與歸納相關的文獻與所用技術。 第三章將介紹本論文所提出之「單一行動錨節點定位演算法」,主要概念以 單一個錨節點在三維座標系統移動,每次移動只改變一個軸向,並利用接收訊號 強度比計算出待定位感測節點的位置。5 有鑒於無人飛行載具之定位飛行模式,第四章將介紹本論文所提出的「割線 定位演算法」,主要概念也是利用單一錨節點在三維座標系統移動,但以割線方 式穿過待定位感測節點的訊號範圍,並利用接收訊號強度比計算出待定位感測節 點的位置。 在現實環境下,多種不同的無線通訊技術均使用於2.4GHz之頻段,因此無線 感測網路將會與同時工作於2.4GHz頻段之通訊技術相互干擾。例如IEEE 802.11[3] 與IEEE 802.15.1[4]等。因此在本論文第五章中將介紹訊號調變和訊號干擾,並分 析因物理層訊號干擾,對定位演算法所造成之誤差,並提出改善之方法,以降低 因物理層訊號干擾所導致的定位誤差率。 第六章則是本論文的結論與說明本研究之未來發展方向。
6
第二章
文獻探討
2.1
定位演算法
無線感測網路目前的定位演算法大致可分為兩種:第一種為Range Based,第 二種為Range Free。分別將相關的定位技術敘述如下:2.1.1
Range Based
Range Based,主要利用距離或角度的資訊來計算定位資訊。在Range Based
的定位方式下有Time of Arrival (TOA)、Time Difference of Arrival (TDOA)、Angle
of Arrival (AOA),Received Signal Strength Indicator (RSSI) [5][6][7][8][9]。
優點: 1. 這種技術在定位上會比Range Free 有著較精確的結果。 缺點: 1. 但在硬體方面需要額外安裝較精確的設備,所以在相對的成本上花費較 高。 2. 耗電量也相對會提高。
7
2.1.1.1 Time of Arrival (TOA)
Time of Arrival (TOA): 基本原理為應用訊號由傳送端到達至接收端時,所需
的耗時時間以作為距離判斷根據的一種方式。其定位原理如圖 2-1 示。當接收端
收到訊號之後,便可根據訊號傳送所耗的秒數乘上此訊號的傳輸速率,即可得知
傳送端與接收端之間的距離。然而,接收端接收到三組以上的訊號資訊,轉換成
距 離 便 可 以 測 得 所 需 的 位 置 。 而 TOA 的 量 測 方 法 其 誤 差 會 來 自 於
NLOS(non-line-of-sight) error 以及 multipath error。此一誤差會導致估算距離大於
實際距離。然而,距離估算的誤差也會導致誤差的來源之一。由於電波訊號傳遞 的速度極為快速,因此即使是極為短小的時間差所造成的估算差異,亦會導致定 位結果產生極大的誤差。 A B C S T1 T2 T3 圖 2-1、TOA 示意圖
8
2.1.1.2 Time Difference of Arrival (TDOA)
Time Difference of Arrival (TDOA): 基本原理是應用幾何學的雙曲線之特
性,也就是雙曲線上的一點至兩焦點距離的差為定值。TDOA 的定位方式可以分 為兩個步驟。首先,應用各種時間估算技術,盡量測得多組的感測節點所接收到 的訊號到達之時間差。再將此一資訊轉換為距離代入雙曲線的方程式裡,形成一 組雙曲線的聯立方程式。再者,利用有效並且快速的運算技巧解出此一聯立方程 式的解,所得此解即為感測節點之位置。然而,TDOA 的時間差有兩種取得方式。 1)直接利用傳送端與接收端之間的 TOA 相減所得。2)利用傳送端與接收端之間接
收訊號相關性的方式取得。TDOA 中,利用 TOA 相減的方式取得時間差與 TOA
系統是相似的,同樣是擷取傳送端訊號傳至每個感測節點的時間。只不過資訊轉
換為距離之後用利用雙曲線方程式來求解。
2.1.1.3 Angle of Arrival (AOA)
Angle of Arrival (AOA): 工作原理如圖 2-2 所示,其測距機制必須要求環境中
包含地標,再這些地標須有相同參考方向。然而,應用指向型天線測得待定位節
點和地標之間的連線和角度差。任兩個地標之間的角度差也可透過指向型天線的
特性進行估算。而最後便可以得知三角形的三個角度和兩個地標之間的距離。便
9 播效應所造成的誤差以及系統本身角度解析度造成的誤差會是 AOA 的主要誤差 來源。但兩者相較之下,多路徑傳播效應會是最主要的誤差來源。多路徑傳播效 應指的是物體反射傳送端之訊號。如果反射訊號也傳達至待定位節點,將使待定 位節點認為此接收到的訊號是從反射物的方向傳送過來,造成待定位節點的誤判 或混淆。然而,因為距離較遠的物體所反射之訊號功率太小,且過長的多路徑傳 播延遲是可以被接收器濾掉。因此,一般而言,多路徑傳播造成的散射會被視為 傳送端附近的干擾訊號源。 A B S θA θB 圖 2-2、AOA 示意圖
2.1.1.4 Received Signal Strength Indicator (RSSI)
Received Signal Strength Indicator (RSSI): 當接收端接收到一訊號之時,可根
據所接收到的訊號強度,以及訊號發送時的強度,找出訊號的衰減值。在比對訊
號衰減程度,即可根據此資訊估測出與發送端之間的距離。將於 3.2 章節詳細介
10
2.1.2
Range Free
Range Free[10][11][12],在不需要獲得確切的距離和角度的資訊下來估計節 點所在位置。通常需要透過無線感測節點所發送的Beacon,經由接收這些Beacon 訊息之後進行計算,得到相互間之距離資訊。因此,一般而言,在物理層允許的 情況下,越多的Beacon訊息則會使其定位越精確。 優點: 1. 在硬體設備上,不需要太昂貴的設備。 缺點: 1. 與Range Based相較下,較不精準。2.2
二維定位相關研究
Baoli Zhang, Fengqi Yu 等人[13]提出了 collaborative localization algorithm,
sensor node 從 GMAN(Group of Mobil Anchor Nodes)接收訊息然而估算位置。如圖
2-3 中,GMAN 是三個 mobile anchor 形成一個分別位於三頂點的等邊三角形。在
文獻[13]所引用之方式主要是利用多組 mobile anchor 同時進行定位,並且 GMAN
以廣播 Beacon 訊息。Beacon 訊息包含座標和 GMAN 的時間戳。其參與定位計算
之 mobile anchor 的數量將與定位精確度成正比。然而,多組 mobile anchor 在相
11 A1
A2 A3
60°
圖 2-3、A Group of Mobil Anchor Node[13]
Sichitiu 和 Ramadurai [14] 所提出的方式是使用 single mobile beacon 和
radio-frequency based,而待定位感測節點利用來自 single mobile node 所廣播的
Beacon 估算位置。圖 2-4 為此研究中所提出 mobile node 的移動示意圖。mobile
beacon node 可以是人為操作的機器、自動飛行的飛機或者是地面上的車輛,但其
12
圖 2-4、Mobile beacon 之移動示意圖[14]
Dragos Niculescu 在於 Ad Hoc Positioning System (APS)提出 DV-HOP 定位演
算法[15]。則方法為網路環境中建置少數的地標並且這些地標的位置是已知。透 過這些地標廣播自身的位置資訊,而預定出位置,則地標所發送的廣播訊息必須 接收到至少三個以上。每一個感測節點接收到廣播訊息時,會累計 HOP 的數目。 並且累加後在將該訊息廣播出去。而感測節點便是利用這些廣播訊息進行自身位 置的計算。DV-HOP 利用計算每一步的平均距離,以降低利用傳輸範圍進行估算 所產生的誤差,距離計算式為Di HCiRavg (Di :與第 i 個地標之間的距離,HCi : 與第 i 個地標之間的最短步數,Ravg :每一步的平均距離)。然而,利用計算每一步 的平均距離可以降低因傳輸範圍估算所導致的誤差。但 DV-HOP 運作於疏密相 間的環境下還是會有較差的定位精確度。
13 Localization (DHL)的定位演算法[16]。在 DHL 中,每個感測節點必須得知鄰居節 點個數,主要作為估測該節點周遭的網路密度。當周遭鄰居節點數目多,表示此 感測節點位於傳輸範圍的邊界之機率較高。因此在估算路徑時,經過感測節點所 傳輸的距離較遠,估算距離需乘上一個較高的權重數值。反之,則周遭鄰居節點 數目少,感測節點所傳輸的距離較近,估算距離則乘上一個較低的權重數值。透 過加權的方式,則可以有效的在疏密相間的環境中運作。
2.3
三維定位相關研究
J. Liang 和 J. Shao 等人的研究[17],以 fix beacon node 佈置於地面作為定位
之參考點。因此 Beacon 訊號由底部往上送,以類似階層的方式一層層往上定位。 透過定位參考點的訊號強度來估算感測節點的位置。但這些定位參考點都是必須 事先佈建且需已知其座標位置。如要用於災難搜救定位,需要事先佈建之機制在 實用性上將是一項無法克服之障礙。 Landscape-3D[18]提出利用行動定位輔助設備,在三維空間緩慢的移動巡 航。在飛行間,行動定位輔助設備週期性的廣播 Beacon 訊號。而每個 Beacon 包 含著輔助設備目前的座標。感測節點收集這些 Beacon 和接收訊號強度用以測量
與輔助設備之間的距離。並應用 Unscented Kalman Filter (UKF)-based 演算法,讓
14
使用類似的方法, Kushwaha 等人[19]提出行動聲波 Beacon。並以利用接收
不同地點的所發送的聲波 Beacon 做完測量距離之應用。而感測節點估算位置時,
同時使用 incremental nonlinear optimization 和 iterative 的技術。並且相互作位置校
正。
圖 2-5、定位計算[20]
Chia-Ho Ou 和 Kuo-Feng Ssu 的研究中[20],作者在無線感測網路的三維定
位,利用 Range free 之定位方式提出其方法。其定位方法如圖 2-5 所示。他們使
用了 flying anchor,上面裝載著 GPS 在任何的時點可以識別出目前的位置。在感
測範圍內四處移動並且不停的廣播它們自己的位置。他們的作法從許多的 flying
anchor 先找出四個點作為 Beacon 節點。再由這四個節點畫出兩個圓形截面。以
15
們所要定位的位置。一旦四個 Beacon 節點被辨別出來,兩個圓截面的構造和穿
過中心的垂直線可以建構出來。
Vibha Yadav 和 Manas Kumar Mishra 等人的研究[21],與文獻[20]相同的利用
多個 flying anchor 上所裝置之 GPS 接收器並結合無線感測訊號強度的定位應用。 如圖 2-6 所示,作者使用方法為四個定位參節點,然而,四個定位參考節點分別 以不同的高度圍繞著感測節點。並且四個節點到感測節點之間發射相同功率。到 達感測節點的接收訊號強度比亦相同。以此取得四段相同半徑透過幾何學計算得 到定位結果。 C1 C2 C3 C4 S 圖 2-6、定位方式示意圖[21]
16
第三章
單一行動錨節點定位法
在 Chia-Ho Ou 和 Kuo-Feng Ssu [20]、Vibha Yadav,Manas Kumar Mishra 等
人[21]的研究,分別提出了 Range free 的三維定位演算法,其所提的方法都有使
用 flying anchor 做為定位參考節點,並且上面裝載著 GPS,這些 flying anchor 藉
由持續廣播本身的位置訊息,以便讓周遭的無線感測節點估算出他們自己本身的
位置。此章節介紹基於類似的方式使用單一行動錨節點(Single Mobile Anchor)並
在此行動錨節點配置 GPS。然而,與兩篇參考文獻不同的是,此章節所介紹之定 位機制並非由 flying anchor 發送 GPS 位置訊息來讓其他感測節點計算他們自己的 位置。而是利用單一行動錨節點接收來自其他感測節點之 Beacon,當單一行動錨 節點收到感測節點的訊息時,能夠快速的計算出感測節點的位置。然而一般的無 線感測節點的處理與計算能力都是非常有限的。因此,此章節所介紹之單一行動 錨節點定位演算法已將此一特性列入演算法設計之考量,否則嵌入式系統可能無 法負擔過於複雜的計算,導致計算時間過長,影響定位之效率。
17
3.1
Freespace 信號損耗模型
路徑損耗和遮蔽效應皆是屬於大範圍衰減(large scale fading),主要是因為距
離、地形、建築物等大範圍環境的影響而導致。傳輸訊號的平均功率是長時間緩
慢的方式再減弱。在於路徑損耗模型的研究,最常被應用的就是自由空間路徑損
耗模型(Freespace pathloss model),根據圖 3-1 自由空間路徑損耗模型示意圖來說
明。假設傳送端所發射的訊號平均功率為 Pt,而接收端與傳送端之間距離為 d 且 所接收到的訊號功率為 Pr。在自由空間模型中,傳送端天線和接收端天線的增益 分別為 Gt及 Gr,然而接收端天線所能接收的訊號功率如下表示。 r t t r PGG d P 2 4 (1) Transmission power : Pt Gain : Gt Received power : Pr Gain : Gr 圖 3-1、自由空間損耗模型
此模型皆用於估算當傳送端和接收端視線可及(Line of Sigh; LOS)所測得的
18 間的距離可視為直線距離,也就是最短距離,例如衛星通訊。基本上在這種通道 傳播模式下,接收端所接收到的訊號強度和距離的平方成反比,這也是因為球面 積和能量守恆定律所產生的結果。在自由空間損耗模型中,給定了傳送端與接收 端之間的距離時,透過自由空間損耗模式的方程式,可以得知當傳送端與接收端 距離為 d 時,接收端的訊號功率 Pr(d)為 L d G G P d P t t r r 2 2 2 ) 4 ( ) ( (2) Pt : 傳輸功率。 Gt : 傳送天線增益。 Gr : 接收端天線增益。 L : 系統散逸系數。 : 電磁波波長。 天線增益 Gt和 Gr與 Effective Aperture Ae 有關,其關係式如下。 2 4 Ae G (3) 為簡化方程式(2),在此將天線增益視為 1,也就是暫不考慮天線增益所影響 之問題。所以 Gt和 Gr的便保持於相同的增益值。此處如使用全向性天線(Isotropic
Antenna),則 Gt和 Gr的單位就為 dBi,如果是半波長雙極天線(Half-wave Dipole
Antenna),則 Gt和 Gr的單位就為 dBd。
19 參數通常是由整個通訊的傳輸衰減、濾波器散逸和天線散逸所造成,若 L=1 則表 示並無任何功率散逸。 然而自由空間損耗模型在於計算距離另有一個計算式,即以傳輸功率與路徑 衰減的資訊來計算傳送端與接收端之間的距離。所謂自由空間傳播指的是天線周 圍為無限廣闊時的電波傳播,是個理想傳播條件。電波在自由空間傳播時,其功 率即不會被遮蔽物所吸收,也不會產生反射或散射之情況。傳輸距離與發射功 率、路徑損耗(patloss)和工作頻率有關。由基本路徑傳輸損耗方程式中,可以發 現接收功率會對距離與頻率的平方倍減少 6 dB [22][23]。 f d
pathloss32.4420log10 20log10 (4)
pahtloss : 傳播損耗,單位為 dB。 d : 傳送距離,單位是 Km。 f : 傳輸頻率,單位是 MHz。 例如某路徑的傳播損耗是 50 dB,傳送端的發射功率是 10 dBm,那接收端的 接收訊號強度是-40 dBm。 下面舉例說明一個工作頻率為 2.4GHz,發射功率為 3 dBm,路徑損耗為 53 dB 的系統在自由空間的傳播距離,透過路徑損耗、工作頻率可以計算出 d = 0.0045 公里。此傳輸距離為理想狀況下,實際的應用中是將會低於此值。這是因為無線 通訊電波會受於各種外界因素的影響,如大氣、阻擋物、多路徑等造成的損耗。
20
然而,由例子說明了透過方程式(4),即可以計算出近似通訊距離。
3.2
接收訊號強度
RSSI (Received Signal Strength Indication)是指接收的訊號強度指示。用以判
別傳輸鏈路的鏈接質量,以及是否需增大傳送功率強度的判定。透過接收訊號的 強弱測定傳送端與接收端之間的距離,進而根據相對應距離關係進行定位計算的 一種定位技術,如 Zigbee 無線感測網路的 CC2431 晶片,其定位應用就是採用此 種技術、算法。接收端測量電路所得到接收的訊號強度指示。這簡化此測量值之 變因,一般不考慮天線增益或傳輸系統的損耗。 無線電波訊號在傳播時,傳送端與接收端所運作的功能是不同性質。接收端 接收來自傳送端所發送的訊號,電波訊號會因為傳送端和接收端之間的距離不同 而在接收的訊號強度有不一樣的變化。以物理特性而言,距離越遠訊號強度越 小。反之,距離越近訊號強度也就越大。然而,RSSI 作為定位之應用,就是利用 距離與接收訊號強度之間的變化關係來進行定位運作。根據不同感測節點所測得 不同的訊號強度值就是 RSSI 用於定位技術本身的主要概念。利用這個關係以完 成定位的功能,提供訊號強度值對於目前許多的無線通訊設備已是基本的功能。 然而,雖目前許多的無線通訊設備已提供訊號強度值,但定位系統之準確度仍需 配合定位演算法的開發方能提升其精確度與穩定性。
21
使用接收訊號強度(Received Signal Strength; RSS)以達到定位之應用是最常
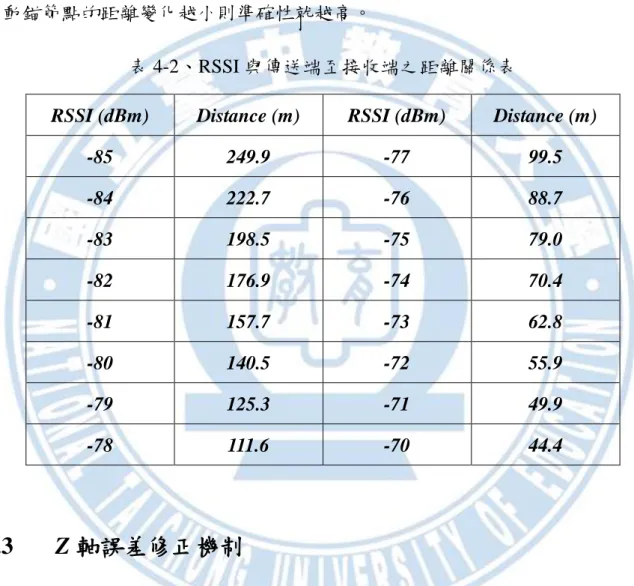
使用的方法之一。RSSI 是一種相當普遍應用的距離測量方法,並且無須裝置額外 的硬體設備即可使用,因此經由接收端的接收訊號強度來計算發送端與接收端的 直線距離將不會大幅增加電力消耗與其他的硬體成本。因此無線感測網路基於 RSSI 的定位應用,已經廣泛的使用於人員目標定位、家庭網路控制、病人醫療照 顧、生態環境監測、兒童追蹤等等。 RSSI 為無線訊號經過路徑損耗之後接收端所接收到的訊號強度,由方程式(4) 可推算至方程式(5) f d RSSI Tx 32.4420log10 20log10 (5) Tx : 傳播功率,單位為 dBm。 d : 傳送距離,單位是 Km。 f : 傳輸頻率,單位是 MHz。 經過移項計算可得到方程式(6) 20 log 20 22 . 34 log 10 10 f d TxRSSI (6) 則距離可由方程式(7)表示 i d 10 , 20 log 20 22 . 34 10f RSSI Tx i (7) 透過方程式(7)可以得到 RSSI 與距離之間的關係如圖 3-2,RSSI 與距離呈現 非線性反成長之關係,且 RSSI 訊號與前一級的 RSSI 距離差也逐漸增大。例如
22
RSSI 為-77 dBm 時距離約為 99.5 m,RSSI 為-78 dBm 時距離約為 111.6 m,當 RSSI
由-77 dBm 降至-78 dBm 兩者距離差為 12.1 m。而當 RSSI 為-84 dBm 時距離為 222.7 m,RSSI 為-85 dBm 時 249.9 m,其兩者距離差距為 27.2 m。即由圖 3-2 可 看出此結果,RSSI 越小與前級的 RSSI 距離差距越大。 圖 3-2、RSSI 與 distance 關係
3.3
接收靈敏度
對於無線通訊設備,接收器的靈敏度表示能夠可靠的接收資料所需的最小功 率,其單位是分貝毫瓦(dBm),用以表示電磁波功率單位。dBm 通過對數之功率 比值,用於表示接收器的靈敏度時,數值越小表示接收靈敏度越高,因此在接收 靈敏度較高的無線接收設備,有效之傳輸距離將可以距離較遠。在 IEEE 802.15.423 協定[24]中,用於 2.4GHz 的無線通訊設備之接收靈敏度為-85 dBm,而 900MHz 的無線通訊設備接收靈敏度為-92 dBm。然而,在 802.15.4 無線通訊設備的供應 商,所提供的設備都超過這些標準的要求,提供的 2.4GHz 無線通訊設備具有-90 dBm ~ -100 dBm 的接收靈敏度。雖實際設備與理論數據之間差距 7 dBm,但卻可 能對 802.15.4 無線通訊設備之間的距離產生實質的影響。將接收靈敏度從-91 dBm 降低至-98 dBm,其傳送與接收裝置之距離就可能相差甚遠。因此,選用接收靈 敏度較高的設備可以提升傳輸距離與接收訊號穩定度,如此將可減少無線通訊設 備的複雜性並且降低成本與減少功率的消耗。另外一個決定無線通訊設備距離的 因素為傳輸功率,無線通訊設備的傳送功率越大,則其傳輸距離就可越遠。IEEE 802.15.4 協定[24]標準要求無線通訊設備有 1 mW(0 dBm)的最小傳輸功率,而市 面上的無線通訊設備具有 1 mW(0 dBm)和 2 mW(3 dBm)的傳輸功率或加掛功率 放大器後將可高達到 32 mW(15 dBm)。因此,接收靈敏度和傳輸功率都對於兩個 無線通訊設備之間的距離造成影響,接收靈敏度越低與傳輸功率越大,可以傳輸 的距離也會更遠,並且可使無線通訊的鏈路更加穩健。 雖然接收靈敏度越高越好,但感測節點在出廠時此數值就以固定無法再做更
改,所以在本章所討論的單一行動錨節點定位法(Single Mobile Anchor Location
estimation algorithm; SMAL)的定位過程,當傳送端的傳輸功率不變,則單一行動
24 節點的 Beacon 訊號。因此為確保在整個定位飛行過程,單一行動錨節點不會超 出訊號可接收範圍,系統將定義一個 RSSI 數值,當所接收到的 RSSI 數值高於此 系統預定數值方進行定位演算法的飛行與計算。 圖 3-3、可接受初始 RSSI 值分析 本論文所使用的 Zigbee 設備在出廠時所設定的接收靈敏度為-91 dBm,以圖 3-3 為例,B 視為目前單一行動錨節點所在位置,A 為位於長、寬均為 20 公尺, 高為 10 公尺之對角頂點,單一行動錨節點在於圖 3-3 中的立方體中做定位移動 飛行。因為頂面為正方形所以可以得知AC為20 2 m,然而根據直角三角型可得 知AB為 30 m。假設 A 點位置為-91 dBm (選用無線感測設備之接收靈敏度),根 據方程式(7)可以算得感測節點與 A 點之對應距離為 497.6 m,則 B 點與感測節點 之距離為 497.6 m – 30 m = 467.6 m。根據方程式(5)可以由距離計算回 RSSI 值則 等於-90.45 dBm,由此可知接收靈敏度至少要大於-90 dBm 才可確保單一行動錨 節點在整體定位演算法移動中不會超出無線訊號範圍。
25
3.4
單一行動錨節點定位演算法
在本章節所提出之單一行動錨節點定位演算法,行動錨節點的飛行模式,以 GPS 上的經緯度作為三維空間的水平軸(X 軸)與縱軸(Y 軸)、高度作為高度軸(Z 軸),利用定位飛行模式,即可以計算出在接收靈敏範圍之內的無線感測節點的三 軸座標。 在本章節研究將其感測節點分為兩種型態, 1)待定位感測節點,其為一般無 線感測節點,2)行動錨節點,有著更進階的功能,例如裝載 GPS。本章節的假設 如下,說明每種節點的類型與功能。3.4.1
待定位感測節點
待定位感測節點即為一般感測節點,用於感測環境訊息並且以 2.4GHz 傳送 訊息。 假設待定位感測節點為靜態的,且無法得知自己的座標位置。 每個節點使用最大功率週期性的發送 Beacon,其傳輸功率標記為 Tx,傳 輸範圍以半徑 R 表示。在半徑 R 所涵蓋之範圍內,感測節點所傳送的 Beacon 將可以成功到達行動錨節點。26
3.4.2
行動錨節點
行動錨節點有著比感測節點更高的硬體規格。它們沒有能量的限制,並且始 終運行足夠的電池電量。由於能隨時偵測到待定位感測節點所傳送的 Beacon,所 以行動錨節點必須設定為非睡眠節點。 單一行動錨節點可以是自行飛行器或者是其他的移動器具,如直升機或 無人飛機(Unmanned Aerial Vehicle)。 單一行動錨節點主要是運作於室外環境的飛行節點,且經由 GPS 接收 器,單一行動錨節點可以偵測到本身目前的位置。 單一行動錨節點配備著一組無線感測網路接收器以及全向天線。 單一行動錨節點能夠根據接收訊號強度測量出與發送端(待定位感測節 點)的距離。
3.4.3
定位測量
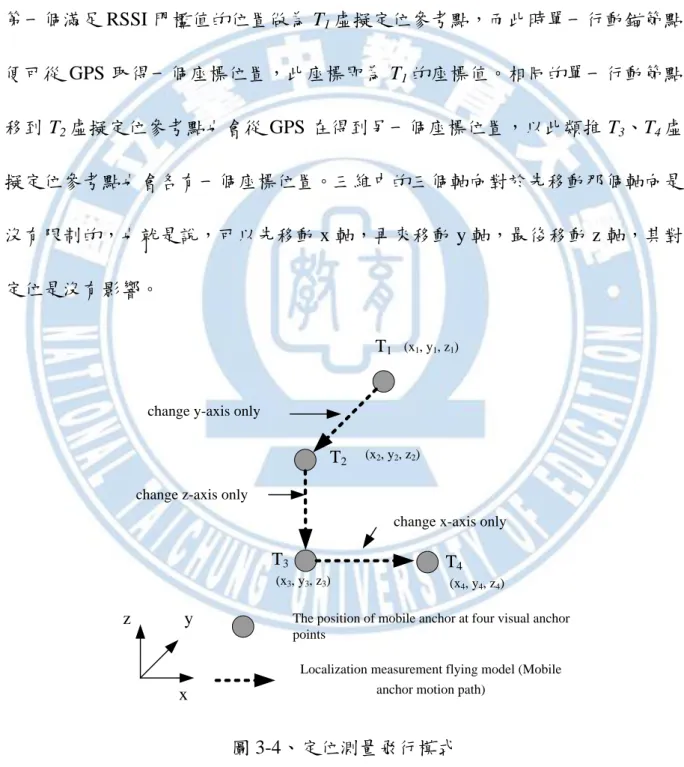
在固定的時間間隔下,單一行動錨節點從其他待定位感測節點接收 Beacon。 因此,在圖 3-4 中,本章節創建了四個"虛擬"的定位參考點,其位置從 T1到 T4, 每一次的移動過程只會改變一個軸向的座標數值。如圖 3-4 所示,當單一行動錨 節點由 T1移動至 T2其只改變了 y 軸座標數值,而從 T2移動至 T3只改變 z 軸座標 數值,一樣的從 T3移動至 T4只改變 x 軸座標數值。圖 3-4,灰色圓圈即為虛擬定27 位參考點,虛線箭頭為單一行動錨節點移動方向。單一行動錨節點在每個虛擬的 定位參考點能夠接收從待定位感測節點送出的 Beacons,因為單一行動錨節點具 GPS 接收器,其可以得知座標位置。當單一行動錨節點從待定位感測節點接收到 第一個滿足 RSSI 門檻值的位置做為 T1虛擬定位參考點,而此時單一行動錨節點 便可從 GPS 取得一個座標位置,此座標即為 T1的座標值。相同的單一行動節點 移到 T2虛擬定位參考點也會從 GPS 在得到另一個座標位置,以此類推 T3、T4虛 擬定位參考點也會各有一個座標位置。三維中的三個軸向對於先移動那個軸向是 沒有限制的,也就是說,可以先移動 x 軸,再來移動 y 軸,最後移動 z 軸,其對 定位是沒有影響。 x y z T1 T2 T3 T4
The position of mobile anchor at four visual anchor points
Localization measurement flying model (Mobile anchor motion path)
(x1, y1, z1)
(x2, y2, z2)
(x3, y3, z3) (x4, y4, z4)
change y-axis only
change z-axis only
change x-axis only
28 在四個虛擬定位參考點都會各自有一組 RSSI 與座標的資訊,其得知此兩種 資訊便可透過一些數學計算得到待定位感測節點之座標位置。首先可由方程式(7) 得知,所接收到 Beacon 的訊號強度也就是 RSSI,可以用來估算虛擬定位參考點 和待定位感測節點的距離。而在定位的研究很多都由待定位感測節點(一般感測節 點)做定位結果運算,則感測節點可用資源可能有限,所以本研究是利用單一行動 錨節點來做定位結果運算。如圖 3-5 所示,四個虛擬定位參考點分別會得到四個 RSSI 值(從 T1到 T4)可以計算出每個虛擬定位參考點和待定位感測節點的距離, 分別表示為 d1、d2、d3、d4。 x y z T2 T3 T4 (x2, y2, z2) (x4, y4, z4) d1 d2 d3 d4 Location unaware sensor node (xs, ys, zs) 圖 3-5、四個虛擬錨點與目標點之距離
29 本章節假定待定位感測節點的座標位置為(xs , ys , zs),而四個虛擬定位參考點 的座標分別為(x1 , y1 , z1)、(x2 , y2 , z2)、(x3 , y3 , z3)、(x4 , y4 , z4),其透過三維空間 的距離方程式可將座標位置與距離長度做個關係連結,如下方程式(8)。 2 2 2 ) ( ) ( ) (xm xn ym yn zm zn d (8) 也就是說,四個虛擬定位參考點與待定位感測節點可利用三維空間距離方程 式取得關係式,如圖 3-5 中的四段距離 d1、d2、d3、d4,可由方程式(9)到(12)表示。 2 1 2 1 2 1 1 (x xs) (y ys) (z zs) d (9) 2 2 2 2 2 2 2 (x xs) (y ys) (z zs) d (10) 2 3 2 3 2 3 3 (x xs) (y ys) (z zs) d (11) 2 4 2 4 2 4 4 (x xs) (y ys) (z zs) d (12) 然而,利用方程式(9)到(12)四個式子有個共通點,就是在方程式裡都與待定 位感測節點的座標位置(xs , ys , zs)有關係,並且再四個方程式裡也只有此三個未知 數,也就是本研究計算後的定位結果,所以透過四個式子解得聯立方程式,最後 待定位節點之位置,可由下列方程式(13)與方程式(14)表示。 2 4 2 4 2 4 4 2 3 2 3 2 3 3 2 2 2 2 2 2 2 2 1 2 1 2 1 1 ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( s s s s s s s s s s s s z z y y x x d z z y y x x d z z y y x x d z z y y x x d (13)
30 ) ( 2 ) ( 2 ) ( 2 2 3 2 3 2 2 2 3 2 2 1 2 2 2 2 1 2 2 2 1 3 4 2 4 2 3 2 4 2 3 z z z z d d z y y y y d d y x x x x d d x s s s (14) 單一行動錨節點沿著 T1到 T4移動,每個虛擬定位參考點會從 GPS 取得一個 座標位置,如(x1 , y1 , z1)。因此,在三維坐標系,本章節研究可以利用四個虛擬定 位參考點與待定位感測節點之間的距離關係,用以估計待定位節點的實際座標位 置。其結果可以利用方程式(9)至(14)有效的取得。
3.4.4
SMAL 模擬
在本小節中,以三維座標系統模擬提出的 SMAL 演算法之結果。利用 Qualnet 網路模擬器[25],建立一個 500 * 500 * 500 m3 的模擬環境。在零高度的感測領域 下,隨機佈署了 50 個未知位置的感測節點。每個待定位感測節點採用固定傳輸 功率(2 mW),且定期廣播 Beacons(0.1 秒)。無線傳播模式是基於 Freespace 傳播 模式。初始,單一行動錨節點被設置於模擬領域的中心。這是根據計劃的定位測 量飛行模式,如圖 3-4。單一行動錨點的飛行模式是由後向前移動了 20 公尺(只 改變 y 軸),從上到下高移動 10 公尺(只改變 z 軸)和由左到右移動 20 公尺(只改變 x 軸)。而單一行動錨節點的移動速度為 1 公尺/秒。其他的模擬參數設置列於表 3-1。31 表 3-1、SMAL 模擬參數 傳輸頻率 2.4GHz 傳輸功率 2 mW 路徑損耗模式 Freespace 行動錨節點接收靈敏度 -90 dBm 模擬結果顯示,如圖 3-6、圖 3-7。圖 3-6 表示平均距離與定位誤差距離之間 的關係。 圖 3-6、平均距離與定位誤差關係 平均距離可以由 d1至 d4的總平均距離得到。結果顯示,SMAL 演算法的定 位誤差與平均距離成一個有規律的比例,平均距離由 75 公尺增加至 325 公尺的 變化,定位誤差範圍在於 0.02 公尺至 0.14 公尺之間。結果也顯示了單一行動錨
32 節點的方法下,感測節點之定位位置是準確的。定位誤差坐落於斜率 0.000432 的 直線附近。 圖 3-7、平均距離與誤差百分比關係 圖 3-7 是平均距離與定位誤差率之間的關係。SMAL 的定位誤差率為 0.04%, 在傳輸範圍內這是一個常數定值。定位的精確度不受到平均距離的影響。模擬結 果顯示,單一行動錨節點在定位飛行的移動距離不必高,便可達到準確的估計定 位出未知位置的節點。結果表明,定位的準確性是 SMAL 演算法的一大優勢。
33
3.5
SMAL 結論
本章節所提出方法,不僅定位出感測節點位置,而且也增強的估計位置的準 確性。SMAL 演算法至少需要四個虛擬定位參考點來接收感測節點的 Beacon,但 是單一行動錨節點的方式使得這個議題容易實施。估計位置的準確性與平均距離 是成線性增加的關係。只要感測節點的 Beacon 在傳輸範圍裡,利用本章所提出 SMAL 演算法將可精確、快速的計算其三維座標位置。SMAL 的定位誤差率為 0.04%,在傳輸範圍內這是一個常數定值。定位的精確度不受到平均距離的增加 而受到影響。因此只要調整待定位感測節點的 Beacon 傳輸功率,增加其訊號傳 輸涵蓋範圍,則 SMAL 演算法將可延長其定位涵蓋距離達更遠之範圍。 SMAL 演算法可應用於山難迷途登山客的搜救輔助,由登山客所配戴之無線 感測訊號發射節點發出訊息,本研究可利用裝載 GPS 接收器之單一行動錨節點, 在三維座標系統裡動態地移動錨節點,藉由收集登山客身上所配戴之微型無線感 測器的所發送之訊號,藉由接收訊強度,利用行動錨節點上所配置之感測元件, 主動協助搜尋迷途登山客並預測登山者當前所在之位置,透過智慧聯網系統,將 登山客位置以網際網路回報給登山管理局後作為救援行動之參考資訊。34
第四章
割線定位法
在前一章節的研究中,利用 SMAL 定位演算法於單一行動錨節點即可準確且 迅速的將待定位感測節點之座標計算完成。但 SMAL 定位演算法必須以第三章所 提出的定位飛行模式飛行,因此在較廣範圍之定位搜索時,其飛行模式將會過於 複雜,無法達成連續性的定位動作,並且如果在四個虛擬定位參考節點之任一位 置上沒有收到 Beacon 訊號,行動錨節點勢必要持續等待,直到下個 Beacon 成功 接收後方能運作。因為三維單一行動錨節點演算法至少需要四個虛擬定位參考點 才能進行運算,如缺少一組 Beacon 之接收訊號強度資訊其可能會導致定位飛行 程序重新來過。因此如何簡化定位測量飛行模式達成可連續性的收集、分析定位 資訊已提升定位效率為本章之目的。因此在本章的研究重點中,將利用具 GPS 接收器與無線感測網路之無人載具飛機做為單一行動錨節點做為定位參考節 點,提出以待定位感測節點的 Beacon 傳輸距離為半徑的三維空間座標之割線飛 行定位演算法,當單一行動錨節點在三維座標系統裡動態地移動,接收來自待定 位感測節點之 Beacon 訊息,改以直線飛行方式來進行定位的運作與計算。35
4.1
割線定位演算法
為簡化 SMAL 定位演算法的無法連續性定位與飛行模式過於複雜等因素,本
章 將 提 出 新 的 三 維 空 間 定 位 方 式 , 即 為 割 線 定 位 演 算 法 (Secant Location
Estimation Algorithm; SLEA)。在無線感測網路定位的研究許多都是利用幾何圖型
的原理,如文獻[20]就是利用球體與圓截面之關係,找出兩個圓截面並且找出兩 條分別穿過兩個圓截面之圓心的直線相交於一點做為最後定位結果,還有三角形 定位法在無線感測網路定位研究中也經常被使用。然而,無線感測網路之嵌入式 微處理機系統無法負擔過於複雜的計算,過於複雜的定位演算法將導致計算時間 過長,間接影響定位之效率。因此,本章所提出的定位演算法雖同樣應用幾何圖 形的原理,但單一行動錨節點僅需使用二次的割線飛行,即可計算出待定位感測 節點之三維座標位置。如此將大幅簡化如文獻[20]、[21]等較複雜的計算方式。文
獻[20]使用多個 flying anchor 發送位置訊息給待定位節點,並從多個 flying anchor
中選取四個作為定位參考節點而此四個參考節點會位於以感測節點最大訊號傳 輸距離為半徑的圓球表面上,透過幾何圖形的應用計算出定位結果,但其要同時 找到此四個參考節點之位置並同步傳送定位資訊是有實行上的困難度。文獻[21] 是利用多個 flying anchor 發送位置訊息給感測節點,同樣選出四個定位參考節 點,且假設四個定位參考節點到達感測節點之 RSSI 數值需相同,代表四個定位 參考節點與感測節點距離亦相同,再透過距離方程式計算其定位結果,同樣的,
36 此四個定位參考節點須在其天線特性、發射功率、背景雜訊干擾等因素完全相同 時,否則難以使得感測節點在接收四個 RSSI 時數值全然相同。 本章所提出之割線定位演算法,首先考慮在理想通道之情形下。如圖 4-1 所 示,將待定位感測節點所發送之 Beacon 的涵蓋範圍視為球體,然而穿過球體內 部將此球劃分為兩半且與球心 C 距離小於半徑之直線AB即為此球體之割線,並 且割線會與球表面相交於兩點(分別標記為 A 與 B 點),因AC與BC為球體之半 徑,所以線段ACBC。 A B C 圖 4-1、割線示意圖 因此,本章根據此一幾何特性對應至無線感測網路的定位模型上。假設待定 位感測節點位為球心位置,其所發送之 Beacon 封包之訊號強度之最遠涵蓋距離 即為球體之半徑,當單一行動錨節點直線飛行並穿越待定位感測節點的 Beacon 訊號之涵蓋範圍,即等同於圖 4-1 的割線(AB)。
37
4.1.1
定位測量
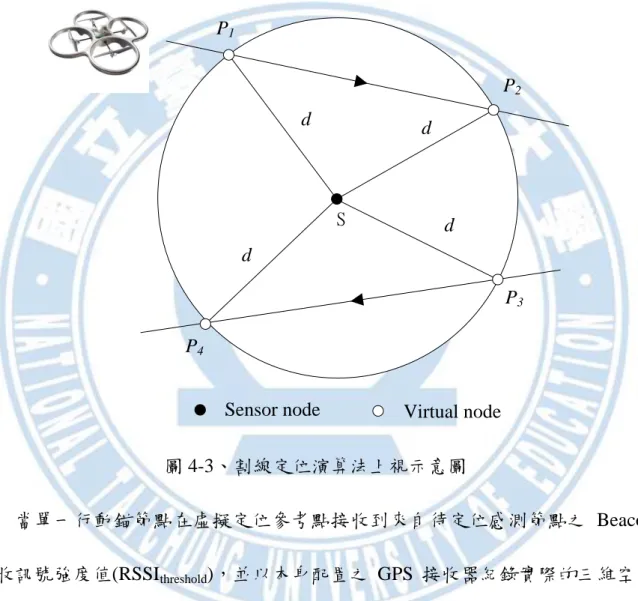
本章所提出之單一行動錨節點的三維割線定位演算法,其方法如圖 4-2 所示。 圖 4-2、割線定位演算法示意圖 假設點 S 為待定位感測節點,然而感測節點所發出的訊號其可視作為一圓球體, 圖中飛行載具裝置有一錨節點即為單一行動錨節點,此行動錨節點必定置於待定 位節點之上方,其圖形以半圓球體呈現。當單一行動錨節點穿越過待定位感測節 點之有效訊號範圍(即 Beacon 封包可正確無誤接收的範圍),有如圓球體之割線, 一組割線必定會在球表面得到兩個虛擬節點。因此只要單一行動錨節點穿越過二 次待定位感測節點的有效訊號範圍,將可得到四個割線與球面交會點。這四個割 線與球面交會點即為定位演算法所需的虛擬定位參考點(如圖 4-2 中的 P1、P2、 P3與 P4),並且在這四個虛擬定位參考點的位置,將有著相同的 RSSI 數值,這是 因為此四個虛擬定位參考點皆在同一球表面上。如圖 4-3 割線定位演算法上視示38 意圖中所示,四個虛擬定位參考點到達球心(S 點)之距離相同,也就是說四個虛 擬定位參考點與待定位感測節點之距離均為 d,此一特性對於割線定位演算法是 相當重要的資訊。 P1 P2 P3 P4 S d d d d
Sensor node Virtual node
圖 4-3、割線定位演算法上視示意圖 當單一行動錨節點在虛擬定位參考點接收到來自待定位感測節點之 Beacon 接收訊號強度值(RSSIthreshold),並以本身配置之 GPS 接收器紀錄實際的三維空間 座標位置,經由二次來回的割線方式穿越過待定位感測節點的有效訊號範圍,必 可以得到四個訊號強度會等於 RSSIthreshold之座標位置。因此在此四個虛擬定位參 考點分別會有各別的三維座標位置,利用此四個三維座標資訊透過割線定位演算 法即可得到待定位感測節點之座標位置。
39 假設圖 4-3 中點 S 的座標為(xs , ys , zs),而四個虛擬定位參考點的座標分別為 (x1 , y1 , z1)、(x2 , y2 , z2)、(x3 , y3 , z3)、(x4 , y4 , z4),透過三維的距離方程式(方程式 (8)),則圖 4-3 中的 d 可由下列表示 2 1 2 1 2 1 ) ( ) ( ) (x xs y ys z zs d (15) 2 2 2 2 2 2 ) ( ) ( ) (x xs y ys z zs d (16) 2 3 3 2 3 2 3 ) ( ) ( ) (x x y y z z d s s (17) 2 4 2 4 2 4 ) ( ) ( ) (x xs y ys z zs d (18) 因為四段距離是相同的,所以方程式(15)至(18) 經過聯立計算分別可以求得 xs、ys、zs,即為待定位感測節點(xs , ys , zs)座標位置。 2 4 2 4 2 4 2 3 2 3 2 3 2 2 2 2 2 2 2 1 2 1 2 1 ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( s s s s s s s s s s s s z z y y x x d z z y y x x d z z y y x x d z z y y x x d (19) ) ( 2 ) ( 2 ) ( 2 11 22 21 12 2 11 1 21 22 11 21 12 2 11 1 21 12 21 22 11 2 12 1 22 b b b b b b b b z a a a a a a a a y a a a a a a a a x c c s c c s c c s (20) ) )( ( ) )( ( 2 1 3 1 3 1 2 1 11 x x z z x x z z a (21)
40 ) )( ( ) )( ( 2 1 3 1 3 1 2 1 12 y y z z y y z z a (22) ) )( ( ) )( ( 2 1 4 1 4 1 2 1 21 x x z z x x z z a (23) ) )( ( ) )( ( 2 1 4 1 4 1 2 1 22 y y z z y y z z a (24) ) ( ) ( 3 1 13 2 1 12 1 C z z C z z ac (25) ) ( ) ( 4 1 14 2 1 12 2 C z z C z z a c (26) ) )( ( ) )( ( 2 1 3 1 3 1 2 1 11 y y x x y y x x b (27) ) )( ( ) )( ( 3 1 2 1 3 1 2 1 12 x x z z z z x x b (28) ) )( ( ) )( ( 2 1 4 1 4 1 2 1 21 y y x x y y x x b (29) ) )( ( ) )( ( 2 1 4 1 4 1 2 1 22 z z x x z z x x b (30) ) ( ) ( 3 1 13 2 1 12 1 C x x C x x bc (31) ) ( ) ( 4 1 14 2 1 12 2 C x x C x x bc (32) 2 1 2 1 2 1 2 2 2 2 2 2 12 x y z x y z C (33) 2 1 2 1 2 1 2 3 2 3 2 3 13 x y z x y z C (34) 2 1 2 1 2 1 2 4 2 4 2 4 14 x y z x y z C (35) 利用聯立方程式解得方程式(20),然而式子中的代號分別由方程式(21)至方程 式(35)表示。在整個計算過程中,只有(xs , ys , zs)為未知數,其他(x1 , y1 , z1)、(x2 , y2 , z2)、(x3 , y3 , z3)、(x4 , y4 , z4),可由 GPS 上得知座標數值,所以為已知的參數。因
41 此,透過此計算便可得知待定位感測節點的座標位置。
4.2
割線定位模擬
在本章節中,我們將分析割線定位演算法之定位計算結果。利用 Qualnet 網 路模擬軟體[25],建立一個 500 * 500 * 500 m3 的模擬環境。在零高度的感測模擬 環境下,將待定位感測節點設置於模擬環境座標之中心位置,且待定位感測節點 採用固定傳輸功率(2 mW)。而單一行動錨節點的移動方式,即在模擬環境中以三 維座標同時改變的非水平直線移動方式,穿過待定位感測節點以 2 mW 傳輸功率 圍半徑的半球體。在此使用非水平直線移動方式,其原因為水平直線只會改變 x 軸與 y 軸數值,並不會改變高度 z 軸,使得數學模型所得到的待定位感測節點的 座標在 z 軸是無窮大,因此四個虛擬定位參考點各自的高度均不能相同。 無線傳播模式是基於 Freespace 傳播模式。在 4.1.1 小節提到我們將設定一個RSSIthreshold 之數值。依照 RSSIthreshold,當單一行動錨節點與待定位感測節點之距
離保持在接收訊號品質均大於 RSSIthreshold,方為有效之定位訊號強度。根據文獻
[26]在 CC2420 晶片針對 PRR(packet reception rate)與 RSSI 之間的分析,其實驗結
果指出,當 RSSI 大於-87 dBm 時,PRR 為 85% (圖 4-4),而 CC2420 的晶片在其
規格說明書中所給予的接收靈敏度為-90 dBm,其參數與實驗結果是相近的。其
42
圖 4-4、PRR vs. RSSI at Power Level 0 dBm[26]
表 4-1、割線定位模擬參數 傳輸頻率 2.4GHz 傳輸功率 2 mW 路徑損耗模式 Freespace RSSI (dBm) -85 ~ -70 Beacon (s) 0.05、0.1、0.3、0.5、0.7、0.9 雖然上述的待定位感測節點說明都是以最大傳輸功率在傳遞訊號,因全向型 天線的無線訊號微波是以天線為中心向外擴散,且越外圍因在大氣間傳遞耗損等 因素造成功率衰減。因此當單一行動錨節點飛穿越過待定位感測節點之有效訊號 範圍時,如圖 4-5 所示,其可分別在於 Zone4(A, B)與 Zone3(C, D)兩組相交於兩 點,然而不同的 Zone 代表著不同的訊號強度,也就是說可以取得多組不同的 RSSI 參考數值。割線定位演算法將可以利用連續接收到的 RSSI 參考數值進行定位之 計算。
43 Zone 1 Zone 2 Zone 3 Zone 4 A B C D 圖 4-5、以不同之接收訊號強度區分多組之接收訊號範圍
44
圖 4-6 為使用不同的 Beacon Interval (Beacon 發送間距)以連續 RSSI 參考數
值所計算出的定位誤差距離。水平軸為各級別的 RSSI 數值,縱軸為距離誤差, 設定 6 組不同的 Beacon Interval 以割線定位演算法所計算出的距離誤差值。由結 果可以得知,當 RSSI 數值越低,也就是行動錨節點離待定位感測節點距離越遠 時,對於以割線定位演算法所計算出之距離誤差則越大,然而導致如此之結果是 因為當無線訊號電波由感測節點發送出來時,隨著傳播路徑損耗的因素使得訊號 送出後會逐漸的衰減,因此當訊號被送至距離越遠的地方其接收訊號強度則越 弱,這意味著距離越遠訊號會越不穩定,且根據圖 3-2 之結果 RSSI 數值越小與 前一級之距離差範圍越大,也就是說在此範圍所接收到 RSSI 數值都相同,因 RSSI 的容許範圍過大而產生較高的定位誤差範圍,因此導致 RSSI 數值越小其定位結 果之距離誤差則越大。而圖 4-6 中同時顯示,Beacon Interval 越小,其定位結果
將會呈現較小的誤差,因為 Beacon Interval 越小,表示行動錨節點接收兩組 Beacon
間的距離差異越小,因此定位結果顯示較低的定位誤差範圍。然而,發送過於密
集的 Beacon Interval 將無助於降低定位誤差,因為自圖 4-6 中顯示,當 Beacon
Interval 為 0.05 秒以及 0.1 秒時,其定位誤差值呈現幾乎相同之結果。而使用過
於密集的 Beacon Interval 將會提升節電耗電量。因此如何選用適當的 Beacon
45
圖 4-7、各級別 Beacon Interval 與連續 RSSI 參考數值所計算的定位誤差百分比(%)
圖 4-7 為各級別的 Beacon Interval 與使用連續 RSSI 參考數值所計算的定位誤
差百分比,水平軸為各級別的 RSSI 數值,縱軸為定位誤差百分比。其誤差百分
比是計算各級別的 RSSI 數值的定位距離誤差與各級別的 RSSI 數值以 FreeSpace
傳遞耗損模型所估算之距離(如表 4-2 RSSI 與傳送端至接收端之距離關係表所示)
的百分比例。由圖 4-7 可得知,定位的準確性會受到不同的 Beacon Interval 所影
響,這是因為不同的 Beacon Interval 相對應的是行動錨節點接收到 Beacon 訊號與
下一次再次接收到 Beacon 訊號的時間差,當行動錨節點以相同速率前進,然而
46
收二次 Beacon 間之距離差距。由結果得知,Beacon Interval 越小其準確性越高,
如 0.1 秒之誤差百分比約為 2% ~ 3%左右,而 0.3 秒之誤差百分比提升至 4% ~ 6%
左右,其說明了 Beacon 越密集對於定位的準確性是相對可以提升的,也就是說
行動錨節點的距離變化越小則準確性就越高。
表 4-2、RSSI 與傳送端至接收端之距離關係表
RSSI (dBm) Distance (m) RSSI (dBm) Distance (m)
-85 249.9 -77 99.5 -84 222.7 -76 88.7 -83 198.5 -75 79.0 -82 176.9 -74 70.4 -81 157.7 -73 62.8 -80 140.5 -72 55.9 -79 125.3 -71 49.9 -78 111.6 -70 44.4
4.3
Z 軸誤差修正機制
割線定位演算法在到達四個虛擬定位參考點的同時,需使用 GPS 接收器接收 實際三維座標位置。然而,經過分析,往往 Z 軸較水平軸向呈現更高的定位誤差 值,經實際計算後其 Z 軸(高度)誤差值平均高於水平誤差 2 倍以上。因此,在本 章節將對於 Z 軸的誤差問題提出一修正機制,如此將可大幅提升定位的精確度。47 修正的方式為利用計算結果的「xs」、「ys」和四個虛擬定位參考節點分別執 行 z 值修正計算最後以平均求得,標記為 zs’。利用方程式(8)即可以計算出四個 zs’,標記為 zs1’, zs2’, zs3’, zs4’。假設計算結果座標為(xs , ys , zs’),虛擬定位參考節點 座標(xi , yi , zi),計算如方程式(36)、方程式(37)。 2 2 2 ) ' ( ) ( ) ( i s i s i si i x x y y z z d ,i = 1 to 4 2 2 2 ) ( ) ( ' i i i s i s si z d x x y y z ,i = 1 to 4 (36) 4 ' ' 4 1
i si s z z (37) 圖 4-8、修正 Z 軸後之定位誤差(m)48 圖 4-8 為修正 Z 軸後之定位誤差,如與圖 4-6 中未使用 Z 軸誤差修正機制的 結果相比較,圖 4-8 明顯呈現較低的定位誤差值。圖 4-9 為圖 4-8 使用修正 Z 軸 後與原割線定位法(圖 4-6)在定位誤差值之比較。其結果顯示,經由修正 Z 軸後之 定位誤差明顯降低許多,而且當 Beacon Interval 越大修正效果越顯著。當虛擬定 位參考點與待定為感測節點之間的距離越遠,其 Z 軸修正所呈現的改善效果越好。 圖 4-9、修正 Z 軸後與原割線定位法在定位誤差值之比較 圖 4-10 為修正 Z 軸後之定位誤差百分比,與圖 4-7 相比較明顯的誤差百分比數值 也降低許多。然而,由圖 4-9 得知 RSSI 數值越小修正的成效會比較顯著,因此, 修正之後的定位誤差百分比反而 RSSI 數值愈小,定位誤差百分比也越小。然而
49 圖 4-6 至圖 4-10 中的波動現象,是因為 RSSI 座標位置之誤差所導致。因模擬過 程是以實際移動的方式進行模擬且模擬器的 RSSI 精確度下至小數下六位。然而, 在現實環境中,將不可能得到四個相同的 RSSI 數值。因此本研究在距離計算方 面將只採取整數部分計算,但導致 RSSI 數值在整數數值範圍中之誤差,導致推 估定位距離的波動現象。然而這也可真實反映出演算法實際執行時也可能會遇到 的情形。 圖 4-10、修正 Z 軸後之定位誤差百分比
50
![圖 2-3、A Group of Mobil Anchor Node[13]](https://thumb-ap.123doks.com/thumbv2/9libinfo/7453142.110751/21.892.108.786.135.966/圖-a-group-of-mobil-anchor-node.webp)
![圖 2-5、定位計算[20]](https://thumb-ap.123doks.com/thumbv2/9libinfo/7453142.110751/24.892.123.769.309.925/圖25定位計算2.webp)
![圖 4-4、PRR vs. RSSI at Power Level 0 dBm[26]](https://thumb-ap.123doks.com/thumbv2/9libinfo/7453142.110751/52.892.122.779.123.925/圖-prr-vs-rssi-at-power-level-dbm.webp)