Operating System:
Chap3 Processes Concept
National Tsing-Hua University
2016, Fall Semester
Outline
Process Concept
Process Scheduling
Operations on Processes
Interprocess Communication
Process Concept
Process Concept
An operating system concurrently executes a variety of programs
(e.g Web browser, text editor, etc) Program — ______________________________
Process — ________________________________________
A process includes:
Code segment (text section)
Data section— global variables
Stack —temporary local variables and functions
Heap —dynamic allocated variables or classes
Current activity (program counter, register contents)
A set of associated resources (e.g. open file handlers)
active entity: a program in execution in memory passive entity: binary stored in disk
Process in Memory
temporary data (e.g.
function parameters, return addresses, local variables)
global variables code
dynamic allocation (e.g. class object, pointer object)
Threads
A.k.a lightweight process:
basic unit of CPU utilization
All threads belonging to the same process share
code section, data section, and OS resources (e.g. open files and signals)
But each thread has its own
thread ID, program counter, register set, and a stack
Process State
States
New: the process is being created
Ready: the process is in the memory waiting to be assigned to a processor
Running: instructions are being executed by CPU
Waiting: the process is waiting for events to occur
Terminated: the process has finished execution
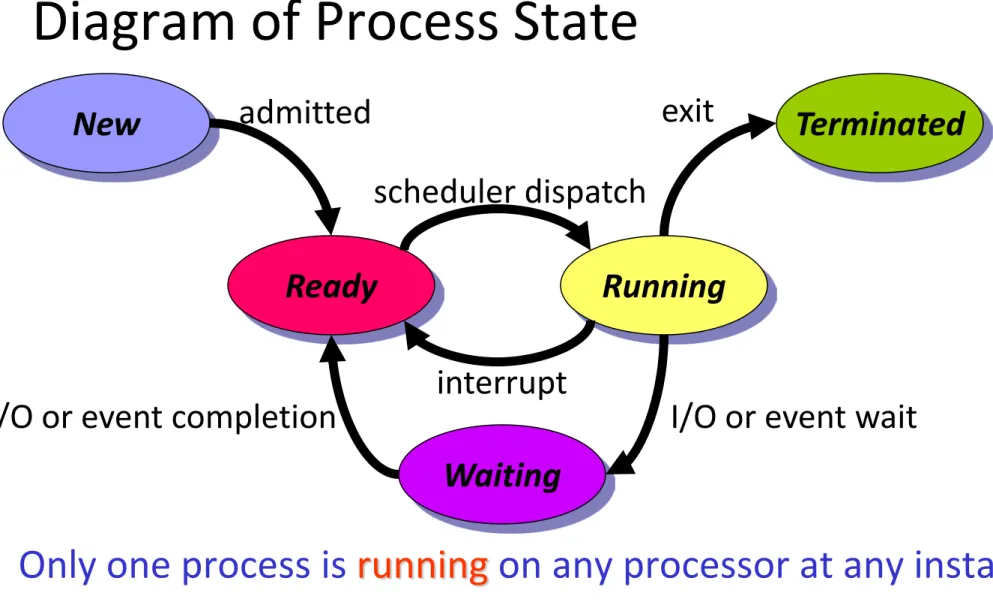
Diagram of Process State
Only one process is running on any processor at any instant
However, many processes may be ready or waiting
New
Waiting Ready
admitted
Running scheduler dispatch
interrupt
Terminated exit
I/O or event wait I/O or event completion
Process Control Block (PCB)
Info. associated with each process
Process state
Program counter
CPU registers
CPU scheduling information (e.g. priority)
Memory-management information (e.g. base/limit register)
I/O status information
Accounting information
To next PCB
executing
executing executing
interrupt or system call
process P0 operating system process P1 interrupt or system call
idle
idle
idle save state into PCB0
reload state from PCB1 . . . . . .
save state into PCB1 reload state from PCB0
Context Switch
Context Switch
Context Switch: Kernel saves the state of the old
process and loads the saved state for the new process
Context-switch time is purely overhead
Switch time (about 1~1000 ms) depends on
memory speed
number of registers
existence of special instructions
a single instruction to save/load all registers
hardware support
multiple sets of registers (Sun UltraSPARC – a context switch means changing register file pointer)
Review Slides (1)
What’s the definition of a process?
What’s the difference between process and thread?
What’s PCB? its contents?
Process state
Program counter
CPU registers
The kinds of process state?
New, Ready, Running, Waiting, Terminated
What’s context switch?
Process Scheduling
Process Scheduling
Multiprogramming: CPU runs process at all times to maximize CPU utilization
Time sharing: switch CPU frequently such that users can interact with each program while it is running
Processes will have to wait until the CPU is
free and can be re-scheduled
Process Scheduling Queues
Processes migrate between the various queues (i.e. switch among states)
Job queue (New State) – set of all processes in the system
Ready queue (Ready State) – set of all
processes residing in main memory, ready and waiting to execute
Device queue (Wait State)– set of processes
waiting for an I/O device
Process Scheduling Queues
I/O queue
Process Scheduling Diagram
ready queue CPU
I/O request I/O queue
I/O
time slice expired
fork a child child
executes child
terminates
wait for an interrupt occurs INT
Schedulers
Short-term scheduler (CPU scheduler)– selects which process
should be executed and allocated CPU (Ready state Run state)
Long-term scheduler (job scheduler) – selects which processes should be loaded into memory and brought into the ready queue (New state Ready state)
Medium-term scheduler – selects which processes should be swapped in/out memory (Ready state Wait state)
CPU
Memory Job4 Job3 Job2 Job1
Operating System
CPU Scheduling Job Scheduling
Job pool Disk
Job swapping
Long-Term Scheduler
Control degree of multiprogramming
Execute less frequently (e.g. invoked only when a process leaves the system or once several minutes)
Select a good mix of CPU-bound & I/O-bound
processes to increase system overall performance
UNIX/NT: no long-term scheduler
Created process placed in memory for short-term scheduler
Multiprogramming degree is bounded by hardware limitation (e.g., # of terminals) or on the self-adjusting nature of users
Short-Term Scheduler
Execute quite frequently (e.g. once per 100ms)
Must be efficient:
if 10 ms for picking a job, 100 ms for such a pick,
overhead = 10 / 110 = 9%
short-term long-term
ready queue CPU
I/O request I/O queue
I/O
Medium-Term Scheduler
swap out: removing processes from memory to reduce the degree of multiprogramming
swap in: reintroducing swap-out processes into memory
Purpose: _________________,______________
Most modern OS doesn’t have medium-term scheduler because having sufficient physical memory or using
virtual memory
improve process mix free up memory
Operations on Processes
Tree of Processes
Each process is identified by a unique processor identifier (pid)
schedpid=0 init pid=1 pageout
pid=2 fsflush
pid=3 intd
pid=140 dtlogin
pid=251 pid=7778 Csh Csh
pid=1400 pid=2123 ls
Netscape
pid=7785 cat
pid=2536 parent of p3
child of p0
UNIX: “ps -ael” will list complete info of all active processes
Process Creation
Resource sharing
Parent and child processes share all resources
Child process shares subset of parent’s resources
Parent and child share no resources
Two possibilities of execution
Parent and children execute concurrently
Parent waits until children terminate
Two possibilities of address space
Child duplicate of parent, communication via sharing variables
Child has a program loaded into it, communication via message passing
UNIX/Linux Process Creation
fork system call
Create a new (child) process
The new process duplicates the address space of its parent
Child & Parent execute concurrently after fork
Child: return value of fork is 0
Parent: return value of fork is PID of the child process
execlp system call
Load a new binary file into memory – destroying the old code
wait system call
The parent waits for one of its child processes to complete
UNIX/Linux Process Creation
Memory space of fork():
Old implementation: A’s child is an exact copy of parent
Current implementation: use copy-on-write technique to store differences in A’s child address space
Originally free memory
B
free memory A
kernel
free memory
B
free memory A
kernel A’s child
After A does an fork
free memory
C
B
free memory A
kernel After the child does an execlp
UNIX/Linux Example
#include <stdio.h>
void main( ) {
int A;
/* fork another process */
A = fork( );
if (A == 0) { /* child process */
printf(“this is from child process\n”);
execlp(“/bin/ls”, “ls”, NULL);
} else { /* parent process */
printf(“this is from parent process\n”);
int pid = wait(&status);
printf(“Child %d completes”, pid);
}
printf(“process ends %d\n”, A);
Output:
this is from child process this is from parent process a.out hello.c readme.txt Child 32185 completes process ends 32185
Example Quiz:
How many processes are created?
#include <stdio.h>
#include <unistd.h>
int main() {
for (int i=0; i<3; i++){
fork();
}
return 0;
}
P0
P0 P1
P0 P2 P1 P3
P0 P4 P2 P5 P1 P6 P3 P7
Process Termination
Terminate when the last statement is executed or exit() is called
All resources of the process, including physical & virtual memory, open files, I/O buffers, are deallocated by the OS
Parent may terminate execution of children processes by specifying its PID (abort)
Child has exceeded allocated resources
Task assigned to child is no longer required
Cascading termination:
killing (exiting) parent killing (exiting) all its children
Review Slides (2)
What’s long-term scheduler? features?
What’s short-term scheduler? features?
What’s medium-term scheduler? features?
What’s the different between duplicate
address space and load program? Their
commands?
Interprocess
Communication (IPC)
Interprocess Communication
IPC: a set of methods for the exchange of data
among multiple threads in one or more processes
Independent process: cannot affect or be affected by other processes
Cooperating process: otherwise
Purposes
information sharing
computation speedup (not always true…)
convenience (performs several tasks at one time)
modularity
Communication Methods
Msg Passing Shared Memory
Shared memory:
Require more careful user synchronization
Implemented by memory access: faster speed
Use memory address to access data
Message passing:
No conflict: more efficient for small data
Use send/recv message
Implemented by system call:
slower speed
Communication Methods
Sockets:
A network connection identified by IP & port
Exchange unstructured stream of bytes
Remote Procedure Calls:
Cause a procedure to execute in another address space
Parameters and return values are passed by message
Server (161.25.19.8)
Socket
(161.25.19.8:80) Client
(146.86.5.20) Socket
(146.86.5.20:1625)
val = server.method(A,B) bool method(A,B){
………..
}
Client Server
A, B, method Boolean return value
Interprocess Communication
Shared Memory
Message Passing
Socket
Remote Procedure Calls
Shared Memory
Processes are responsible for…
Establishing a region of shared memory
Typically, a shared-memory region resides in the address space of the process creating the shared-memory segment Participating processes must agree to remove memory
access constraint from OS
Determining the form of the data and the location
Ensuring data are not written simultaneously by
processes
Consumer & Producer Problem
in
out
Producer process produces information that is consumed by a Consumer process
Buffer as a circular array with size B
next free: in
first available: out
empty: in = out
full: (in+1) % B = out
The solution allows at most (B-1) item in the buffer
Otherwise, cannot tell the buffer is fall or empty
/*producer*/
while (1) {
while (((in + 1) % BUFFER_SIZE) == out) ; //wait if buffer is full
buffer[in] = nextProduced;
in = (in + 1) % BUFFER_SIZE;
}
/*consumer*/
while (1) {
while (in == out); //wait if buffer is empty nextConsumed = buffer[out];
out = (out + 1) % BUFFER_SIZE;
}
Shared-Memory Solution
/* global data structure */
#define BUFSIZE 10 item buffer[BUFSIZE];
int in = out = 0;
in out
in out
“in” only modified by producer
“out” only modified by consumer
Interprocess Communication
Shared Memory
Message Passing
Socket
Remote Procedure Calls
Message-Passing System
Mechanism for processes to communicate and synchronize their actions
IPC facility provides two operations:
Send(message) – message size fixed or variable
Receive(message)
Message system – processes communicate without resorting to shared variables
To communicate, processes need to
Establish a communication link
Exchange a message via send/receive
Message-Passing System
Implementation of communication link
physical (e.g., shared memory, HW bus, or network)
logical (e.g., logical properties)
Direct or indirect communication
Symmetric or asymmetric communication Blocking or non-blocking
Automatic or explicit buffering
Send by copy or send by reference
Fixed-sized or variable-sized messages
Direct communication
Processes must name each other explicitly:
Send (P, message) – send a message to proc P
Receive (Q, message) – receive a message from process Q
Properties of communication link
Links are established automatically
One-to-One relationship between links and processes
The link may be unidirectional, but is usually bi- directional
Solution for producer-consumer problem:
limited modularity: if the name of a process is changed, all old names should be found
Direct communication
/*producer*/
while (1) {
send (consumer, nextProduced);
} /*consumer*/
while (1) {
receive (producer, nextConsumed);
}
Indirect communication
Messages are directed and received from mailboxes (also referred to as ports)
Each mailbox has a unique ID
Processes can communicate if they share a mailbox
Send (A, message) – send a message to mailbox A
Receive (A, message) – receive a message from mailbox A
Properties of communication link
Link established only if processes share a common mailbox
Many-to-Many relationship between links and processes
Link may be unidirectional or bi-directional
Mailbox can be owned either by OS or processes
Indirect Communication
Mailbox sharing
Solutions
Allow a link to be associated with at most two processes
Allow only one process at a time to execute a receive operation
Allow the system to select arbitrarily a single receiver.
Sender is notified who the receiver was
P1 P2 P3
Mailbox send recv?
recv?
Chapter3 Processes Concept Operating System Concepts – NTHU LSA Lab 46
Synchronization
Message passing may be either blocking (synchronous) or non-blocking (asynchronous)
Blocking send: sender is blocked until the message is received by receiver or by the mailbox
Nonblocking send: sender sends the message and resumes operation
Blocking receive: receiver is blocked until the message is available
Nonblocking receive: receiver receives a valid message or a null
Buffer implementation
Zero capacity: blocking send/receive
Bounded capacity: if full, sender will be blocked
Unbounded capacity: sender never blocks
sender receiver
buffer
Interprocess Communication
Shared Memory
Message Passing
Socket
Remote Procedure Calls
Sockets
A socket is identified by a concatenation of IP address and port number
Communication consists between a pair of sockets
Use 127.0.0.1 to refer itself
Server (161.25.19.8)
Socket
(161.25.19.8:80)
Client
(146.86.5.20)
Server
(161.25.19.8)
socket() bind() listen() accept()
read()
close() socket()
connect() write()
close()
Block until client requests
write() read()
Well-known port 161.25.19.8:80
Data req.
Data reply Assign port
146.86.5.20:1625 Client
(146.86.5.20) Socket
(146.86.5.20:1625)
Sockets
Considered as a low-level form of communication unstructured stream of bytes to be exchanged
Data parsing responsibility falls upon the server and the client applications
Server Socket
(161.25.19.8:80) Client
Socket
(146.86.5.20:1625)
HTTP/1.1 200 OK
Date: Mon, 23 May 2005 22:38:34 GMT Server: Apache/1.3.3.7
Last-Modified: Wed, 08 Jan 2003 23:11:55 GMT GET /index.html HTTP/1.1
Host: www.example.com
HTTP example:
Remote Procedure Calls: RPC
Remote procedure call (RPC) abstracts procedure calls between processes on networked systems
allows programs to call procedures located on other machines (and other processes)
Stubs – client-side proxy for the actual procedure on
the server
Client and Server Stubs
Client stub:
•Packs parameters into a message (i.e. parameter marshaling)
•Calls OS to send directly to the server
•Waits for result-return from the server
Server stub:
•Receives a call from a client
•Unpacks the parameters •Calls the corresponding procedure
•Returns results to the caller
Review Slides (3)
Shared memory vs. Message-passing system?
Direct vs. Indirect message-passing system?
Blocking vs. Non-Blocking?
Socket vs. RPC?
Reading Material & HW
Chap 3
HW (Problem set)
3.1
3.2
3.5
3.7
3.10
Backup
Example: POSIX Shared Memory
{ /* allocate a R/W shared memory segment */
char* segment_id = shmget(IPC_PRIVATE, 4096, S_IRUSR | S_IWUSR);
/* attach the shared memory segment */
char* shared_memory = (char*) shmat(segment_id, NULL, 0);
/* write a message to the shared memory segment */
sprintf(shared_memory, “Write to shared memory”);
/* print out the string from the shared memory segment */
printf(“%s\n”, shared_memory);
/* detach the shared memory segment */
shmdt(shared_memory);
/* remove the shared memory segment */
shmctl(shared_memory, IPC_RMID, NULL);
size R/W mode R/W mode mem. location
Example: Mach Message Passing
Mach operating system
developed at CMU
microkernel design
most communications are carried out by messages and mailboxes (aka ports)
Problem: performance (data coping)
When each task (process) is created
kernel & notify mailboxes also created
kernel mailbox: channel between OS & task
notify mailbox: OS sends event notification to
Mach Mailbox
port-allocate: system call to create a mailbox
default buffer size: 8 messages
FIFO queueing
a message: one fixed-size header + variable-length data portion
implementing both blocking- & non-blocking send/receive
Msg
len to
mailbox from
mailbox type size value type size value . . .
header data
RPC Problems
Data representations integer, floating?
Different address spaces pointer?
Communication error duplicate or missing calls
RPC Problems: Data Representation Issue
Problem
IBM mainframes use EBCDIC char code and IBM PC uses ASCII code
Integer: one’s complement and 2’s complement
Floating-point numbers
Little endian and big endian
Solution
External data representation (XDR)
RPC Problems: Address Space Issue
A pointer is only meaningful in its address space
Solutions
No pointer usage in RPC calls
Copy the entire pointed area (such as arrays or strings)
Only suitable for bounded and known areas
RPC Problems: Communication Issue
RPCs may fail, or be duplicated and execute more than once, as a result of common network errors
at most once : prevent duplicate calls
Implemented by attaching a timestamp to each message
The server must keep a history large enough to ensure that repeated messages are detected
exact once : prevent missing calls
The server must acknowledge to the client that the RPC call was received and executed
The client must resend each RPC call periodically until the server receives the ACK
Pipes
One of the 1st IPC mechanism in early UNIX systems
Pipe is a special type of file
Issues in implementing
uni- or bi-directional?
half or full duplex? (travel in both directions simultaneously)
Must a relationship (parent – child) exist?
Over a network, or reside on the same machine?
Read-end write
-end
Ordinary Pipes
Also called anonymous pipes in Windows
Requires a parent-child relationship between the communicating processes
Implemented as a special file on Unix (via fork(), a child process inherits open files from its parent)
Can only be used between processes on the same machine
Unidirectional: two pipes must be used for two–way communication
UNIX:
int fd[2];
pipe(fd);
Windows:
CreatePipe(&ReadHandle, &WriteHandle, &sa, 0)
Named Pipes
No parent-child relationship is required
Several processes can use it for communications
It may have several writers
Continue to exist after communicating processes exit
In Unix:
Also called FIFO
Communicating processes have to be on the same machine
In Windows:
bi-directional
Communicating processes can be on different machine
UNIX/Linux: Fork
Inherited from the parent:
process credentials
environment
stack
memory
open file descriptors
signal handling settings
scheduler class
process group ID
session ID
current working directory
root directory
file mode creation mask (umask)
resource limits
controlling terminal
Unique to the child:
process ID
different parent process ID
Own copy of file descriptors and directory streams.
process, text, data and other
memory locks are NOT inherited.
process times, in the tms struct
resource utilizations are set to 0
pending signals initialized to the empty set
timers created by timer_create not inherited
asynchronous input or output operations not inherited
Remote Method Invocation
RMI is a Java mechanism similar to RPC
RMI allows a Java program on one machine to invoke
a method on a remote object instead of a function
Distributed Objects
A remote object with client-side proxy
2-16
Static & Dynamic RMI
RMI = Remote Method Invocation
Invoke an object’s method through proxy
Static invocation
objectname.methodname(para)
If interfaces change, apps must be recompiled
Dynamic invocation