Volume 20, No.2, 2016, pp. 109-128 DOI:10.6574/JPRS.2016.20(2).3
1國立臺灣大學土木工程學系 博士後研究員 收到日期:民國 103 年 03 月 14 日
2國立臺灣大學土木工程學系 副教授 修改日期:民國 104 年 12 月 23 日
*通訊作者, 電話: 02-23678645, E-mail: [email protected] 接受日期:民國 105 年 02 月 17 日
光達點雲幾何特徵萃取及匹配
莊子毅
1趙鍵哲
2*摘 要
光達感測器隨著在掃描速率、測程及定位精度方面的效能提升,儼然已成為三維空間資訊蒐集技術 的主流。光達系統載具平台具備空載、車載與靜態地面掃描三種形式因應不同測繪需求,而為建構完整 場景描述與獲取多時期資料整合之加值效益,點雲資料套合即為重要的前端處理程序之一。點雲資料套 合作業倘仰賴人工進行控制標布設或共軛特徵量測,在執行效率與成本上往往未能獲得最佳效益。基於 此,為提升點雲套合前置作業效能,本研究研擬自動化方式萃取光達點雲中點、直線與平面三種基本幾 何元件,並考量特徵品質以及在滿足套合轉換模式下完成共軛特徵對應。實驗成果顯示,本研究建構之 特徵萃取及匹配演算法可獲致良好的共軛特徵對應,匹配過程所計算的轉換參數估值則可逕行點雲套合 任務或作為嚴密套合的良好初始值。
關鍵詞:光達點雲、幾何特徵、特徵萃取、特徵匹配。
1. 前言
隨著科技產業發展蓬勃,光達新式感測器不 僅記錄點位反射強度值,亦可同時收集點位色彩 與波形資訊作為後續分析判釋的依據。在防災環 境工程、文物數位保存及數位地球建置等應用領 域已被廣為使用。光達系統可依其載具分為空載、
車載與地面靜態掃描三種形式,以不同的掃描軸 向與移動性因應各類測繪需求。然而,測製的點 雲往往需通過資料套合作業以作後續運用。對於 具直接地理定位資訊的空載及車載資料而言,套 合作業可視為共軛區域資料微小系統偏差之最 佳擬合,又或者用以改正衛星訊號失鎖時的偏差 資料;而對於基於儀器坐標系統的靜態掃描,不 同測站資料必須轉換至共同坐標基準以描述完 整場景。以資料加值效益而言,套合作業可進行 不同時期或不同光達平台的資料整合,對於環境 變 遷 、 都 市 規 劃 與 提 升 數 位 城 市 模 型 細 緻 度
(OGC, 2013)應用具有顯著的效益。點雲套合方法 中可依資料處理標的物分為覘標式(Target-based)、
表 面 離 散 點 式 (Surface-based) 、 幾 何 特 徵 式 (Feature-based)、影像輔助式(Image-based)與直接 地理定位(Direct georeferencing)五種類別(Chuang, 2012)。現行實務中仍多以人工進行覘標式作業,
受限於現地狀況往往無法獲致最佳品質成效。表 面離散點式的方法,如 ICP(Besl and McKay, 1992) 及 LS3D(Akca, 2007),則對於雜訊抵抗與演算效 率需額外審慎處理,同時,初始轉換的品質將直 接影響資料套合成效。影像輔助式的方法除包含 利 用 配 置 相 機 獲 得 的 影 像 方 位 做 為 參 考 依 據 (Al-Manasir and Fraser, 2006),三維點雲亦可轉化 為 二 維 距 離 影 像 (Range image) 或 強 度 影 像 (Intensity image),透過影像處理技術進行影像特 徵 偵 測 與 匹 配 輔 助 點 雲 套 合 作 業 (Böhm and Becker, 2007; Eo et al., 2012)。然而,配置相機引 入的額外誤差與點雲內插程序皆會造成資料精 度損失。幾何特徵式乃利用由點雲萃取出明顯的
特徵元件作為套合作業運算的標的物,程序包含 特徵萃取、特徵匹配與套合轉換計算三個階段,
其中特徵萃取成效將決定後續套合作業品質,而 特徵匹配則關聯套合作業的自動化程度。
點雲特徵萃取主要方法包含區域成長、參數 空間、張量及影像處理等演算方式。區域成長乃 利用各點與相鄰點位間的位相幾何關係作為判 斷依據,通常牽涉資料的全域搜尋與迭代計算而 具較高的計算複雜度(Gorte, 2002;Lee, 2002;
Roggero, 2002;Lin and Jaw, 2004;Tseng and Wang, 2005; Filin and Norbert, 2006;Rabbania et al., 2006; Wang and Tseng, 2010)。透過參數空間進行 特徵萃取為基於特徵元素於參數空間群聚的特 性,透過參數群聚(或稱群集)分析(Cluster analysis) 推求目標特徵,如霍夫轉換(Hough, 1962);將此 概 念 擴 展 至 三 維 空 間 則 可 萃 取 空 間 的 平 面 (Vosselman and Dijkman, 2001) 與 直 線 特 徵 (Morgan and Habib, 2002)。張量演算法包含張量 分析(Tensor calculus)、張量投票(Tensor voting) 與張量分解(Tensor decomposition)三個階段,分 別進行資料點編碼、張量傳遞與萃取特徵資訊;
Schuster (2004)即應用張量分析進行高壓線與建 物立面萃取。影像處理的萃取策略通常是將三維 資訊化簡為二維影像,透過影像特徵偵測技術確 認特徵位置後再反推三維空間坐標,如 Jaw and Chuang (2008)結合影像邊緣偵測與霍夫轉換由 點雲萃取三維直線特徵,並以空間幾何約制及最 小二乘平差指標進行特徵匹配;Kilian et al. (1996) 將點雲內插成網格高程影像,進行區域影像匹配 建立資料對應關係;Vosselman and Maas (2001) 將點雲資料內插成不規則三角網並透過最小二 乘匹配完成航帶點雲資料平差。然而,維度轉換 過程中內插及重新取樣造成的精度損失與計算 量仍需審慎評估。
特徵匹配方法除了常用的最小二乘匹配外,
特 徵 描 述 元 (descriptor) 如 Shape histograms (Ankerst et al., 1999) 、 depth buffer descriptor (Heczko et al., 2002) 及 light field descriptor (Chen et al., 2003)為普遍應用技術,藉由配對全
域或局部的特徵描述以獲致具最小共軛特徵差 異的轉換關係(Chua and Jarvis, 1997; Belongie et al., 2001; Gelfand et al., 2005; Li and Guskov, 2005; Gal and Cohen-Or, 2006)。然而,匹配成效 容易受到雜訊與相似物件影響。
點、直線與平面為目前文獻廣為採用的幾何 特徵,也是都市場景中的主要幾何元件。以幾何 約制型態而言,點特徵在坐標三軸方向具有穩固 的約制能力,而直線與平面特徵則在其軌跡方向 存 在 自 由 度 。 然 而 , 鑒 於 光 達 掃 描 的 光 跡 (Footprint)及有限取樣的掃描特性,點特徵在辨 識及確立共軛對應上不如直線與平面特徵明確;
直線特徵可直觀勾勒物件輪廓卻易受到光跡於 邊緣外擴內縮的影響(Ackermann, 1999)而降低可 靠度;平面特徵具有明顯的幾何辨別性與簡單的 數學解析式,但易受限於掃描視角使得幾何分布 變化相對單調。因此,結合點、直線與平面三種 幾何特徵可增加資料處理彈性,並改善單一特徵 元件在部分嚴峻場景遭遇觀測量不足或特徵分 布不均勻等問題。
本研究針對幾何特徵式點雲套合作業中的 特徵萃取與特徵匹配兩個主要程序分別提出針 對點、直線與平面特徵的多特徵萃取機制及多特 徵匹配法,藉由整合多重幾何特徵之效益,提升 點雲處理實務效能及自動化作業程度。
2. 研究方法
光達技術產製高密度點雲而伴隨著龐大的 數據資料,因此如何有效率進行資料處理實為相 關研究重點之一。本研究提出的多特徵萃取機制 基於影像處理及群聚分析搭配由粗到細(Coarse to fine)的執行策略,可有效率地基於原始點雲獲 取精確的直線、平面及點特徵。因此研究中演算 法著重於快速獲得可靠的特徵觀測量,符合套合 任務需求,而非追求全體特徵之完整性。多特徵 匹配法亦採取漸進式執行策略,避免全域資料搜 尋以獲得最佳執行效能。研究中分別以點位三軸 坐標(𝑋𝑖, 𝑌𝑖, 𝑍𝑖)表示點特徵;直線特徵可採直線端
點坐標(ℒ{𝑋𝑖,1, 𝑌𝑖,1, 𝑍𝑖,1, 𝑋𝑖,2, 𝑌𝑖,2, 𝑍𝑖,2})、四參數式 ( ℒ{𝑑𝑖, 𝑒𝑖, 1, 𝑝𝑖, 𝑞𝑖, 0} ) 與 六 參 數 式 (ℒ{𝑡𝑖, 𝑢𝑖, 𝑣𝑖, 𝑋0𝑖, 𝑌0𝑖, 𝑍0𝑖})型態;平面特徵則適用三 參數式(𝒫{𝜃𝑖, 𝜑𝑖, 𝜌𝑖}或 𝒫{𝑎𝑖, 𝑏𝑖, 𝑐𝑖})之描述。以上 參數符號意義可參考式(1)至式(4)說明。
2.1 多特徵萃取機制
考量光達掃描的離散取樣特性,實際場景中 的角點等特徵點位未必具體呈現於點雲中,因此,
於點雲資料中直接量測該特徵點位坐標之作法 並不能獲致精確位置;相對而言,直線與平面特 徵於點雲資料中具有較顯著的幾何表徵,因此,
本研究除偵測直線以及平面特徵以外,並利用相 鄰兩直線或三平面交會的方式決定點特徵位置,
提升點特徵萃取之精度及可靠度。如圖 1 所示,
萃取架構中直線與平面特徵可分項進行,並基於 原始點雲精度以誤差傳播獲得所萃取特徵之品 質。
2.1.1直線特徵萃取
圖 2 呈 現 直 線 特 徵 的 萃 取 架 構 (Jaw and Chuang, 2008),為降低資料轉換與內插處理的計 算量,本研究將點雲粗化為低於原始解析度之距 離影像(Range image),透過Canny邊緣線偵測 (Canny, 1986)與霍夫轉換技術確認影像直線特徵
位置後推求其三維坐標,並返回原始點雲中擷取 該直線環域內之點雲資料進行精化(Refinement) 處理(圖3(c)): 區域內之點雲若可描述兩相鄰平 面,則以平面擬合後交會直線特徵;若僅可描述 線性特徵則直接進行直線擬合。理論上,平面交 會相較於直接擬合處理可獲得較精確可靠的直 線特徵,但須強調的是:兩種直線特徵萃取途徑 皆由原始點雲進行平差擬合,萃取成果可由點雲 精度透過誤差傳播獲得量化的品質,作為後續處 理賦予直線特徵觀測量權重的合理依據。式(1) 與式(2)呈現直線特徵方程式之參數形式。其中,
[𝑋0𝑖, 𝑌0𝑖, 𝑍0𝑖]𝑇與[𝑡𝑖 𝑢𝑖 𝑣𝑖]𝑇分別第𝑖條直線特 徵之參考點與方向向量;[𝑝𝑖, 𝑞𝑖, 0]𝑇表示直線特 徵在X-Y平面上之穿刺點,而[𝑑𝑖 𝑒𝑖 1]𝑇為對應 之方向向量;𝑘𝑖、𝑧𝑖為尺度因子; (𝑎1, 𝑏1, 𝑐1)與(𝑎2, 𝑏2, 𝑐2)為直線兩面式之平面法向量分量;矩陣上 標” 𝑇”為轉置運算符號。
[ 𝑋𝑖
𝑌𝑖
𝑍𝑖
] = [ 𝑋0𝑖
𝑌0𝑖
𝑍0𝑖
] + 𝑘𝑖[ 𝑡𝑖
𝑢𝑖 𝑣𝑖
] = [ 𝑝𝑖
𝑞𝑖
0] + 𝑧𝑖[𝑑𝑖
𝑒𝑖
1] (1)
{𝑎1𝑋 + 𝑏1𝑌 + 𝑐1𝑍 − 1 = 0
𝑎2𝑋 + 𝑏2𝑌 + 𝑐2𝑍 − 1 = 0 (2)
直線特徵萃取
平面特徵萃取
點特徵萃取 多重幾何特徵
光達點雲資料
圖 1 多特徵萃取架構
點雲資料 內插 距離影像
影像直線 特徵偵測
轉換 近似三維直線
切割 原始點雲
是否具有兩相鄰 平面區域
平面交會 直線特徵
三維 直線擬合
三維 直線特徵 是
否 圖 2 直線特徵萃取流程
(a) 離散點雲 (b) 距離影像直線偵測
(c) 原始點雲切割 (d) 平面交會或直線擬合 圖 3 直線特徵萃取示意圖
2.1.2 平面特徵萃取
考量計算效能與資料點密度,平面特徵萃取 程序亦進行點雲粗化轉化為解析度較低的網格 資料,網格間隔越大,雖可減少計算量,但伴隨 特徵精度之損失。於網格資料建立後,隨後計算 各網格的平面法向量,並透過群聚分析找出主要 法向量方向。主要法向量方向可作為平面霍夫轉 換的參數區間近似值,可有效縮減霍夫轉換參數 搜尋空間以提高演算效能。圖 4 及圖 5 分別呈現 平面特徵萃取流程及各階段資料處理示意,而式 (3)與式(4)為本研究分別於空間域(Spatial domain) 以及參數域(Parameter domain)所採用之平面特 徵參數式。
𝑎𝑖𝑋 + 𝑏𝑖𝑌 + 𝑐𝑖𝑍 = 1 (3)
𝑠𝑖𝑛𝜃𝑖𝑐𝑜𝑠𝜑𝑖𝑋 + 𝑠𝑖𝑛𝜃𝑖𝑠𝑖𝑛𝜑𝑖𝑌 + 𝑐𝑜𝑠𝜃𝑖𝑍 = 𝜌𝑖 (4)
其中,[𝑎𝑖 𝑏𝑖 𝑐𝑖]𝑇代表第𝑖個平面之法向量;𝜃𝑖為 法向量與 Z 軸之夾角(天頂距);𝜑𝑖為法向量投影 在 X-Y 平面上與 X 軸之夾角;𝜌𝑖為原點至平面的 垂直距離。
2.1.3 點特徵萃取
本研究點特徵之萃取為利用相鄰的直線或 平面特徵進行交會計算獲得。在最小必要觀測量 下,空間中的任意兩條直線、三個平面或一條直 線與一個平面皆可進行點特徵交會計算。為避免 產生不符合真實場景描述的虛擬點特徵,本文將
直線與平面特徵分開處理並建立距離門檻判斷 特徵間的鄰近程度,在符合相鄰判斷條件且非平 行的特徵才可進行交會。圖 6 為相鄰條件判斷示 意圖,其中𝜏為考量點雲間距所設定之相鄰半徑;
實線圈點為交會之實體點特徵;虛線圈點代表不 存在的虛擬點;式(5)與式(6)分別為描述以兩直 線特徵交會出點特徵之條件式與轉化為方便解 算之矩陣式方程式。
𝑃𝑡𝑙𝑖𝑛𝑒= 𝑃𝑡1+ 𝑘 ∙ 𝑢⃗⃗⃗⃗ = 𝑃𝑡1 2+ 𝑙 ∙ 𝑢⃗⃗⃗⃗ (5) 2
[𝑢⃗⃗⃗⃗ −𝑢1 ⃗⃗⃗⃗ ] [𝑘2 𝑙] + [𝑃𝑡1− 𝑃𝑡2] = 0 (6)
其中,𝑃𝑡𝑙𝑖𝑛𝑒為直線交會之點坐標向量,𝑃𝑡1與𝑃𝑡2 為兩交會直線各自之參考點向量,𝑢⃗⃗⃗⃗ 與𝑢1 ⃗⃗⃗⃗ 為方2 向向量,𝑘與𝑙為尺度因子據以決定交會之點特徵 位置。
同樣地,倘由三個相鄰平面交會點特徵,
則交會之點特徵坐標為式(7)三平面方程式聯立 解:
[ 𝑛⃗ 1 𝑛⃗ 2
𝑛⃗ 3
] ∙ 𝑃𝑡𝑝𝑙𝑎𝑛𝑒− [ 𝜌1
𝜌2
𝜌3] = 0 (7)
其中,𝑃𝑡𝑝𝑙𝑎𝑛𝑒為平面交會之點坐標向量;𝑛⃗ 𝑖為各
平面之單位法向量;𝜌𝑖(i=1,2,3)定義與式(4)同。
式(6)與式(7)之未知參數值𝜉可分別由式(8) 求得:
𝜉 = (𝐴𝑇𝑃𝐴)−1𝐴𝑇𝑃𝑦 (8)
其中,𝐴為式(6)或式(7)對未知參數之偏微分矩陣;
y 為觀測量向量;P 為由觀測量方差協方差建構 之權矩陣。
點雲資料
建構粗化 網格資料
計算各 網格之法向量
法向量參數
群聚分析 平面霍夫轉換 平面 特徵擬合
平面特徵
圖 4 平面特徵萃取流程
(a) 離散點雲 (b) 內插網格資料 (c) 各網格法向量 (d) 法向量群聚分析 圖 5 平面特徵萃取示意圖
圖 6 交會點特徵之相鄰條件示意圖
2.2 多特徵匹配法
本文提出多特徵匹配法針對點、直線與平 面三種幾何特徵進行幾何關係校正、篩選及確認 最佳共軛對應。特徵共軛對應之正確性乃根基於 匹配過程中合理的轉換參數推求,因此匹配的輸 出不僅給予特徵的共軛對應,也同時建構特徵資 料間的初始轉換關係,有助於後續施作嚴密套合 提供良好近似值的自動化作業程度。多特徵匹配 法縮寫為 RSTG,各個英文縮寫分別代表旋轉校 正 (Rotation alignment) 、 尺 度 估 計 (Scale estimation)、平移校正(Translation alignment)與幾 何檢查(Geometry check)四個處理程序。圖 7 呈現 RSTG 匹配架構,在滿足最小觀測量條件下的各 種特徵型態可聯合或單獨進行匹配運算。此外,
程序中將各類特徵觀測量的隨機性納入評估,考 量待匹配特徵品質之差異性,同時提升匹配與轉 換參數估計之可靠度。多特徵匹配法為兩組資料 匹配模式,以此為基礎進行任兩組資料匹配再將 數據整合則可達成多組資料匹配效益。
2.2.1 旋轉校正
旋轉校正程序乃恢復兩組特徵資料間的姿 態差異,並於旋轉矩陣估計的同時搜尋「初始匹 配」作為後續匹配程序之基礎。圖 8 顯示旋轉校 正的程序架構,各類型特徵首先以式(9)轉換成常 規化向量(Normalized vectors),亦即單位向量,
以將不同類型或不同尺度之特徵進行聯合匹配,
相應的精度品質則由原特徵透過誤差傳播得之。
初始匹配的判斷是基於共軛特徵在不同組資料 間的幾何相似度與所建構的旋轉矩陣正確性。待 匹配特徵必須通過各項檢核機制才可視為正確 配對並列入初始匹配成果。初始匹配所需之特徵 個數僅需滿足旋轉矩陣估計之最小求解條件即 可,因此在特徵搜尋策略上僅須進行部分配對 (Partial matching),不需針對所有資料逐一進行匹 配,以降低計算複雜度。另外,匹配以旋轉因子 為第一處理參數,並利用常規化向量為特徵觀測 量進行候選之旋轉矩陣建構及篩選,其利基為向 量只與方向有關,所使用之特徵分布是否良好並 不具影響。
{
𝑣(1)𝑖=‖∆𝑃𝑡∆𝑃𝑡⃗⃗⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗⃗⃗ (1)𝑖𝑗
(1)𝑖𝑗‖𝑜𝑟‖𝐷𝑣𝐷𝑣⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗ (1)𝑖
(1)𝑖‖𝑜𝑟‖𝑁𝑣𝑁𝑣⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗ (1)𝑖
(1)𝑖‖
𝑣(2)𝑖=‖∆𝑃𝑡∆𝑃𝑡⃗⃗⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗⃗⃗ (2)𝑖𝑗
(2)𝑖𝑗‖𝑜𝑟‖𝐷𝑣𝐷𝑣⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗ (2)𝑖
(2)𝑖‖𝑜𝑟‖𝑁𝑣𝑁𝑣⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗ (2)𝑖
(2)𝑖‖
, 𝑖 ≠ 𝑗 (9)
其中,𝑣(1)𝑖與𝑣(2)𝑖分別表示在第一及第二組幾何 特徵資料第𝑖個常規化向量;∆𝑃𝑡⃗⃗⃗⃗⃗⃗⃗ (1)𝑖𝑗表示第一資 料組中第𝑖個與第𝑗個點坐標差異向量;𝐷𝑣⃗⃗⃗⃗⃗ (1)𝑖與 𝑁𝑣⃗⃗⃗⃗⃗ (1)𝑖則表示第𝑖條直線方向向量與第𝑖個平面法 向量。同樣地,∆𝑃𝑡⃗⃗⃗⃗⃗⃗⃗ (2)𝑖𝑗、𝐷𝑣⃗⃗⃗⃗⃗ (2)𝑖、𝑁𝑣⃗⃗⃗⃗⃗ (2)𝑖分別表示 在第二組資料中的前述特徵。初始匹配之搜尋方 法與檢核程序分別說明如下。
特徵 資料二
特徵
資料一 旋轉校正
尺度估計
平移校正
幾何檢查
共軛特徵
三維 相似轉換參數
圖 7 多特徵匹配法架構
否 初始匹配搜尋與轉換參數估計
旋轉矩陣 正交性檢查
初始匹配
否 是
是
旋轉矩陣 特徵
資料一
特徵 資料二 建構特徵之常規化向量
一致性檢查
圖 8 旋轉校正程序
2.2.1.1 初始匹配搜尋與轉換參數估計
搜尋程序中首先依據特徵萃取階段擬合的 觀測量精度品質進行特徵排序,使品質較好的特 徵優先進行配對以列入初始匹配成果。隨後基於 排列組合所建立的配對表,藉由反覆計算程序每 次選取 3 組候選特徵,用以建構相似幾何矩陣𝑅𝐺
(Han, 2010a, 2010b),將特徵品質納入考量的相似 幾何矩陣可依式(10)獲得(Han et al., 2011),並以 奇異值分解推求候選之旋轉矩陣𝑅 (Arun et al., 1987; Umeyama, 1991),如式(12)。透過旋轉矩陣 的正交性(自候選之旋轉矩陣中篩選旋轉矩陣)及 一致性檢核機制判定共軛特徵之正確性。當正確 的特徵配對個數累積達到預設的初始匹配個數,
或已無共軛特徵可配對時,則停止反覆計算程序,
並再以全部初始匹配特徵重新計算旋轉矩陣作 為此階段成果輸出。初始匹配停止個數應考量待 匹配特徵觀測量數目予以設定。由後續 3.2.1 節 測試成果顯示,此階段採取部份特徵匹配策略確 實可大幅縮減執行時間。
式(10)中的𝑃(1)與𝑃(2)分別為描述兩組待匹配 特徵資料品質之權矩陣;式(11)中 𝐶(1)與 𝐶(2)矩陣 則分別由每次反覆計算程序選取之三組特徵常 規化向量堆疊而成;𝑈與𝑉𝑇為兩正交矩陣,𝛴為 對 角 矩 陣 。 詳 細 旋 轉 矩 陣 估 算 可 參 考 (Han, 2010a)。
𝑅𝐺= 𝐶(2)𝑇 𝑃(2)𝑇 𝑃(1)𝐶(1)(𝐶(1)𝑇 𝑃(1)𝑇 𝑃(1)𝐶(1))−1= 𝑈𝛴𝑉𝑇 (10)
𝐶(1)= [𝑣(1)1𝑇 𝑣(1)2𝑇 𝑣(1)3𝑇 ]𝑇
𝐶(2) = [𝑣(2)1𝑇 𝑣(2)2𝑇 𝑣(2)3𝑇 ]𝑇 (11)
𝑅 = 𝑈𝑉𝑇 (12)
2.2.1.2 旋轉矩陣正交性檢查
匹配特徵所建構的旋轉矩陣首先需進行正 交性檢查。基於向量經旋轉後其長度不變特性,
旋轉矩陣其特徵值的絕對值應等於 1,針對式 (10) 𝛴矩陣中的三個奇異值(𝜆1, 𝜆2, 𝜆3)進行初步 篩選,若可符合式(13)之條件,則該候選之旋轉 矩陣可視為滿足正交矩陣條件並判定為旋轉矩 陣。
𝜆1⁄𝜆2≅ 𝜆2⁄𝜆3≅ 𝜆3⁄ (13) 𝜆1
2.2.1.3 一致性檢查
由於式(9)中的常規化向量不包含位置資訊,
平行的向量對於旋轉矩陣估計有同樣的效力及 結果,因此必須進一步檢核待匹配特徵在兩組資 料中的幾何相似性,利用距離位置因子以排除平 行向量造成的錯誤匹配;接者針對反覆計算程序
中各組旋轉矩陣估計成果進行一致性檢核濾除 粗差。幾何相似性是以各特徵觀測量在不同資料 中的相對距離比例做判斷;旋轉矩陣一致性檢核 則是基於在正確的共軛特徵對應下,每次反覆計 算程序所獲得的旋轉矩陣值應相近似,因此針對 各組三個旋轉參數估值進行群聚分析,若某組旋 轉 參 數 未 落 於 群 聚 值 域 範 圍 內 則 視 為 錯 誤 匹 配。
2.2.2 尺度估計
本研究將尺度參數納入匹配程序,促使匹配 機制更加嚴密並可擴展應用於不同量測機制或 生產來源的匹配需求。尺度參數可藉由一段空間 距離在兩組資料間的比例進行估計 (Horn, 1987;
Horn et al., 1988)。此階段運用一致性檢查時估算 的距離屬性推算空間距離之對應,以獲得兩組資 料間的尺度參數。尺度參數𝑆估計如式(14)所示 (Han et al., 2011);圖 9 展示直線特徵間的空間距 離示意圖。
𝑆 = (∑𝑛𝑑 𝑃𝑖
𝑖=1 )−1∑𝑛𝑑 𝑃𝑖 𝑖=1
𝑑𝑖𝑠𝑡(2)𝑖
𝑑𝑖𝑠𝑡(1)𝑖 (14) 其中,𝑆為尺度參數;𝑃(1)與𝑃(2)為兩距離觀測量 之權矩陣;𝑑𝑖𝑠t(1)𝑖與𝑑𝑖𝑠𝑡(2)𝑖則分別表示在資料一 與資料二中的相應距離;𝑛𝑑為距離觀測量個數。
圖 9 直線特徵空間距離示意圖
2.2.3 平移校正
基 於 兩 組 資 料 間 依 式 (15) Helmert transformation 轉換模式進行套合之假設條件,若
已知旋轉姿態與尺度參數,則平移參數可以線性 方式獲得(Horn, 1987; Umeyama, 1991; Lu et al., 2000; Han, 2010a)。然而,式(15)之轉換模式乃建 構於點對點之對應,精確的平移參數估計需以已 知精確的共軛點對應為前提。當共軛點特徵數量 不足以供應轉換參數求解或品質不佳時,則無法 求解或無法獲得可靠的平移參數估計值。因此,
本研究基於空間共線約制的直線特徵空間相似 轉換(Jaw and Chuang, 2008)進行平移參數線性估 計,跳脫點對點對應的限制,提升多特徵匹配法 資料處理彈性。式(16)為以直線端點推演共軛直 線軌跡之對應(非端點與端點對應),消除尺度因 子 k 即可獲得兩個獨立觀測方程式。依此,理論 上,利用至少兩不平行共軛直線段之端點(每條直 線各取一端點)便可解算平移參數。
𝑇 = [ 𝑋
𝑃(2)𝑖𝑌
𝑃(2)𝑖𝑍
𝑃(2)𝑖] − 𝑆𝑅 [ 𝑋
𝑃(1)𝑖𝑌
𝑃(1)𝑖𝑍
𝑃(1)𝑖]
(15)其 中 𝑇 = [𝑇𝑋 𝑇𝑌 𝑇𝑍]𝑇 為 平 移 向 量 ; [𝑋𝑃(1)𝑖, 𝑌𝑃(1)𝑖, 𝑍𝑃(1)𝑖]𝑇與[𝑋𝑃(2)i, 𝑌𝑃(2)𝑖, 𝑍𝑃(2)𝑖]𝑇分別 代表在不同資料中的第𝑖個點特徵。
𝑆𝑅 [ 𝑋𝐿(1)𝑖
𝑌𝐿(1)𝑖
𝑍𝐿(1)𝑖] + 𝑇 − [ 𝑋𝐿(2)𝑖
𝑌𝐿(2)𝑖 𝑍𝐿(2)𝑖] = 𝑘 [
𝑡(2)𝑖 𝑢(2)𝑖
𝑣(2)𝑖] (16)
其 中[𝑋𝐿(1)𝑖, 𝑌𝐿(1)𝑖, 𝑍𝐿(1)𝑖]𝑇與[𝑋𝐿(2)i, 𝑌𝐿(2)𝑖, 𝑍𝐿(2)𝑖]𝑇 分 別 表 示 兩 組 資 料 間 第𝑖 個 端 點 特 徵 坐 標 ; [𝑡(2)𝑖 𝑢(2)𝑖 𝑣(2)𝑖]𝑇為在資料二中第𝑖個端點特 徵之常規化向量;𝑖 = 1~𝑛𝑒,𝑛𝑒為端點特徵個數;
k 為尺度因子。共軛端點特徵及其相應品質資訊 可由初始匹配成果推求。
2.2.4 幾何檢查
兩組資料間的初始匹配及與轉換關係已由 上述匹配程序確立,此階段首先利用多特徵轉換
數學模式(Jaw and Chuang, 2010)將點、直線與平 面特徵轉換至相同坐標基準,消除尺度、旋轉與 平移差異。隨後針對資料中尚未匹配的特徵(見 2.2.1 節),計算其相對於初始匹配特徵之距離與 姿態角度關係,藉由特徵間的相對幾何一致性可 確認剩餘的特徵對應。其中距離與角度門檻可由 特徵品質推得,並且在滿足前述各項檢核機制的 條件下,一對多的特徵對應關係亦可被接受及保 留。
3. 實驗測試與分析
本文針對所提出的多特徵萃取機制與多特 徵匹配法以模擬及實際資料進行量化評估,驗證 方法可行性與光達實務處理之成效,各階段實驗 配置與成果分述如下。
3.1 多特徵萃取測試
實驗中以地面與空載光達點雲資料進行多 特徵萃取測試,點雲相關資訊如表 1 所示;兩組 資料各階段執行成果如表 2 所示。
本實驗在 Intel i5 CPU 2.53GHz 環境下以 Matlab 程式語言進行測試。地面光達點雲特徵萃 取之執行時間約為九分鐘,共萃取出 32 條直線 特徵與 8 個平面特徵;空載光達點雲資料處理時
間約四分鐘,共萃取出 102 個特徵包含 49 條直 線特徵、40 個平面特徵與 13 個點特徵。表 2 的 萃取成果分別以淺藍色菱形與紅線顯示點特徵 與直線特徵位置,而各平面特徵則以不同色彩呈 現 。 表 3 記 錄 特 徵 萃 取 之 成 果 品 質 , 其 中 (𝜎̅̅̅, 𝜎𝑑 ̅̅̅, 𝜎𝑒 ̅̅̅, 𝜎𝑝 ̅̅̅)、(𝜎𝑞 ̅̅̅, 𝜎𝑎̅̅̅, 𝜎𝑏 ̅ )與(𝜎𝑐 ̅̅̅, 𝜎𝑋 ̅̅̅, 𝜎𝑌 ̅̅̅)分別代表𝑍 直線、平面與點特徵參數之平均精度。
實驗成果顯示:多特徵萃取機制具備自動化 執行點雲特徵萃取能力,萃取之特徵可勾勒出場 景物件結構,在數量與分布可滿足點雲套合作業 需求。由表 2 特徵萃取成果可發現平面特徵萃取 成果雖可涵蓋較完整的場景區域,但其法向量幾 何分布變化單調;點特徵因採取特徵交會方式獲 取,故其點位分布及數量受制於場景幾何,表 2 區域放大圖(左)則可顯示未符合相鄰條件的兩直 線特徵並未進行點特徵交會。
3.2 多特徵匹配測試
本文以模擬資料評估匹配演算法的執行效 率與成效,並以實際點雲資料進行測試驗證。各 階段實驗配置方別說明如下。
表 1 點雲相關資訊
地面光達 空載光達
系統 Trimble Mensi GS200 Riegl LMS-Q680i 量測精度 2.5mm@25m 20mm@250m 場景尺寸(m) 20×25×14 250×350×110 點數(點) 5,907,407 268,335
平均掃描距離(m) 16 800
點密度(點數/𝑚2) 14,360 4
平均點間距(cm) 0.1 50
表 2 特徵萃取成果
地面光達點雲 空載光達點雲
點雲 資料
距離 影像 邊緣 偵測
各網 格法 向量
特徵 萃取 成果
A
A
A 區 域放 大圖
表 3 萃取特徵品質
地面光達點雲 空載光達點雲
直線特徵個數 32 49
𝜎𝑑
̅̅̅ 0.0009 0.0116 𝜎𝑒
̅̅̅ 0.0008 0.0085 𝜎𝑝
̅̅̅ 0.003m 0.038m 𝜎𝑞
̅̅̅ 0.003m 0.029m
平面特徵個數 8 40
𝜎𝑎
̅̅̅ 0.0070 0.0131 𝜎𝑏
̅̅̅ 0.0029 0.0102 𝜎̅ 𝑐 0.0026 0.0191
點特徵個數 0 13
𝜎𝑋
̅̅̅ N/A 0.133m
𝜎𝑌
̅̅̅ N/A 0.210m
𝜎𝑍
̅̅̅ N/A 0.111m
3.2.1 模擬資料評估
為探討多特徵匹配法對於特徵分布複雜度 與特徵觀測量品質因素的匹配成效,實驗中模擬 四組 1000×1500×250 立方公尺空間中不同特徵 幾何分布的配置,並分別給予特徵觀測量如表 4 第一列所示的隨機誤差。每組實驗配置皆重複進 行 100 次以進行成果統計,而每次計算會重新模 擬 100 個幾何特徵(包含 25 個點特徵、50 條直線 特徵與 25 個平面特徵),其中,正確匹配率為 100 次測試成果中正確配對之平均比例;第一類錯誤 率(Omission error)代表 100 次測試中該配對而未 獲 得 配 對 之 平 均 比 例 ; 同 理 , 第 二 類 錯 誤 率 (Commission error)代表 100 次測試中不該配對而 被視為共軛對應之比例;𝑛𝑚表示初始匹配設定個 數;括弧內數值為視特徵觀測量等權之匹配成果。
共軛幾何特徵除了在空間位置與精度品質具有 差異,在幾何形體上亦有形狀、長短與尺寸上的 不同,例如直線特徵之非等長對應以及平面特徵 涵蓋面積之差別。圖 10 為模擬特徵示意,圖 11 呈現不同觀測量精度配置下每次匹配計算之成 果統計圖,藍線為單次正確匹配率、紅線為平均 正確匹配率、綠線為單次第一類錯誤率、青藍線 為單次二類錯誤率。
由成果顯示,多特徵匹配法在觀測量品質
±0.01 公尺下具有 99%之平均正確匹配率;在
±0.1 公尺隨機誤差時仍可有 88%之平均正確匹 配率。為避免錯誤匹配影響成果之可靠度,匹配 程序中各門檻值的設定乃以特徵觀測量精度為 依據做嚴格設定。因此,第一類錯誤可維持在 1%
至 12%,而第二類錯誤保持 0%。此外,匹配程 序中將特徵觀測量品質納入考量,除作為在初始
匹配搜尋時做為排序(品質較好的特徵可先行處 理)及各判斷門檻設定的依據外,主要目的為在匹 配程序中引入特徵觀測量之權矩陣,藉以獲得較 精確可靠的轉換參數估值以及正確與完整的配 對成果。匹配程序中的幾何檢查實乃根基於兩組 資料間的正確轉換關係。由表 4 成果顯示在不評 估觀測量品質的條件下,平均正確匹配率下降約 8%至 17%。
本測試同樣是在 Intel i5 CPU 2.53GHz 環境 下以 Matlab 程式語言進行計算。由表 4 匹配成果 顯示,在初始匹配個數(𝑛𝑚)設定為總特徵觀測量 個數之 20%時,匹配程序平均需執行 21 秒完成 100 組多重特徵匹配任務,在演算時效上明顯優
於未給定初始匹配個數而進行全搜尋(本例即為 𝑛𝑚= 100)時的 241 秒;在觀測量隨機誤差小於
±0.1 公尺以下時,平均正確匹配率最大差異為 4%,具高品質且相近之匹配成效。因此本實驗成 果顯示引用部分特徵進行配對搜尋策略確實可 在不影響匹配表現的前提下達到降低演算負荷 之效益。
就特徵匹配個數及分布複雜度而言,多特徵 匹配工作成效無疑地勝過以人工逐一進行比對 作業。當然,演算執行效率高度相關於程式編譯 技巧、語言與設備,目前的匹配計算效率仍可再 行改良,擬於後續研究工作中進行最佳化作業。
表 4 特徵匹配成果
𝑛𝑚 觀測量標準偏差(m) ±0.01 ±0.03 ±0.05 ±0.1
20
平均正確匹配率 (%) 99(91) 97(86) 95(82) 88(77) 平均第一類錯誤率 (%) 1(9) 3(14) 5(18) 12(23) 平均第二類錯誤率 (%) 0(0) 0(0) 0(0) 0(0) 平均執行時間 (sec.) 20(20) 21(22) 21(20) 22(18)
100
平均正確匹配率 (%) 99(89) 98(87) 97(81) 92(75) 平均第一類錯誤率 (%) 1(11) 2(13) 3(19) 8(25) 平均第二類錯誤率 (%) 0(0) 0(0) 0(0) 0(0) 平均執行時間 (sec.) 241(242) 243(244) 244(239) 237(243)
圖 10 模擬幾何特徵分布示意圖(紅點: 點特徵;紅線:直線特徵;藍色區塊:平面特徵)
(a) ±0.01 公尺隨機誤差 (b) ±0.03 公尺隨機誤差
(c) ±0.05 公尺隨機誤差 (d) ±0.1 公尺隨機誤差 圖 11 匹配統計成果(𝑛𝑚= 20)
3.3 實際資料測試
本階段實驗以國立成功大學圖書館主體之 地面與空載光達點雲資料進行測試,兩不同平台 之掃描資料能組合出完整之場景三維結構,然此 兩組點雲資料具低重疊度以及高差異性之幾何。
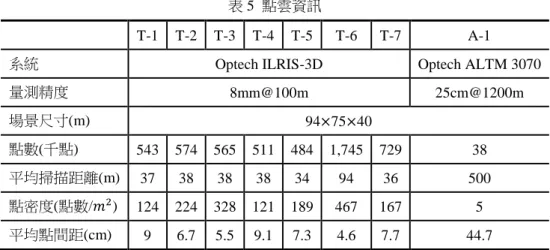
測試中首先執行多特徵萃取程序並遂行多特徵 匹配。測試成果含驗證演算法實際效益以及展現 處理跨平台點雲資料之功能。表 5 說明點雲資料 之相關資訊,其中 T-1 至 T-7 代表七組地面光達 點雲資料,A-1 代表空載點雲。
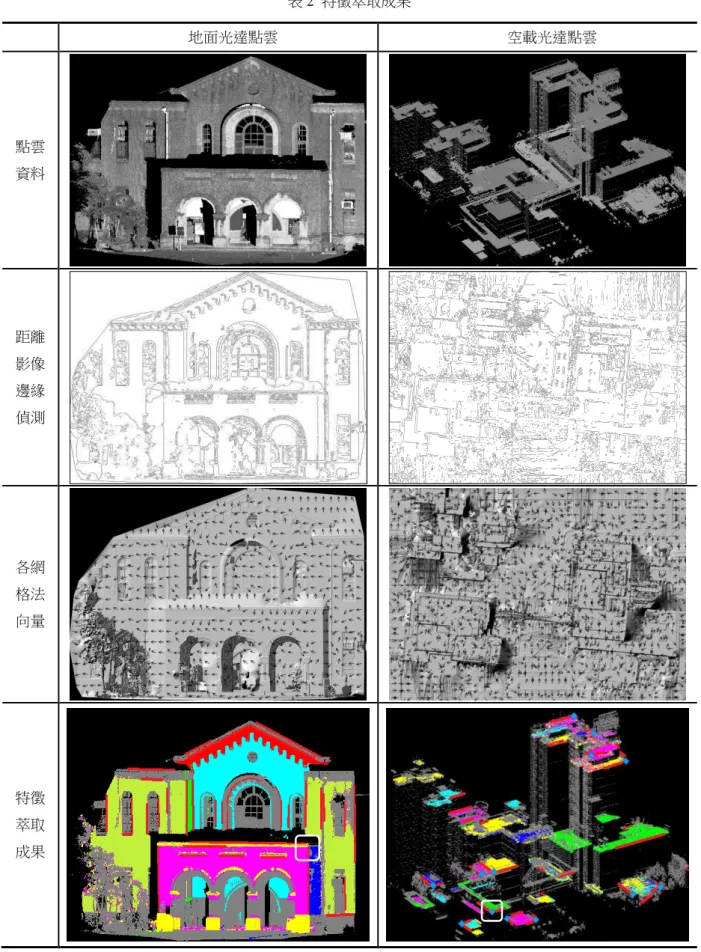
表 6 呈現點雲、特徵萃取以及特徵匹配成果,
其中深藍色菱形與紅線代表點與直線特徵,平面 特徵以不同顏色套至相應點雲位置並以相同色 彩標註共軛平面。各測站所萃取之特徵個數如表
7 所示。
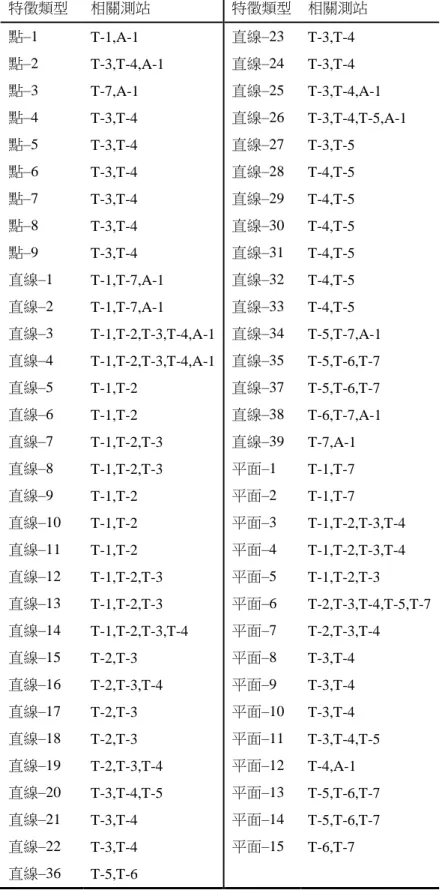
表 8 顯示幾何特徵匹配共軛特徵對應成果。
匹配程序由 297 個特徵中獲得 63 組共軛對應,
包含 9 組點特徵、39 組直線特徵與 15 組平面特 徵,經人工檢視,所有匹配成果皆正確。特徵萃 取及特徵匹配作業時間分別約為 7 分鐘與 41 秒。
值得注意的是:本實驗點雲資料匹配不但包含不 同測站地面點雲之套合,在地面與空載光達點雲 資料間亦成功配對得 3 個點特徵、9 個直線特徵 與 1 個平面特徵,顯示多特徵匹配法能施用於重 疊區受侷限、坐標基準不同以及點雲密度與品質 迥異的跨平台點雲資料。除此之外,匹配程序中 建立的轉換關係參數值可作為後續嚴密套合作 業參數估計之起始值,助益於點雲套合任務。
表 5 點雲資訊
T-1 T-2 T-3 T-4 T-5 T-6 T-7 A-1 系統 Optech ILRIS-3D Optech ALTM 3070
量測精度 8mm@100m 25cm@1200m
場景尺寸(m) 94×75×40
點數(千點) 543 574 565 511 484 1,745 729 38 平均掃描距離(m) 37 38 38 38 34 94 36 500 點密度(點數/𝑚2) 124 224 328 121 189 467 167 5 平均點間距(cm) 9 6.7 5.5 9.1 7.3 4.6 7.7 44.7
表 6 場景點雲、特徵萃取與匹配成果
T-1 T-2 T-3
點 雲 資 料
萃 取 成 果
匹 配 成 果
T-4 T-5 T-6
點 雲 資 料
萃 取 成 果
匹 配 成 果
T-7 A-1
點 雲 資 料
萃 取 成 果
匹 配 成 果
表 7 各測站萃取特徵個數
T-1 T-2 T-3 T-4 T-5 T-6 T-7 A-1 總數 點特徵 11 1 9 8 4 0 7 3 43 直線特徵 33 23 35 29 23 15 22 13 193 平面特徵 7 6 11 10 7 5 9 6 61 總數 51 30 55 47 34 20 38 22 297
表 8 特徵匹配成果
特徵類型 相關測站 特徵類型 相關測站
點–1 T-1,A-1 直線–23 T-3,T-4 點–2 T-3,T-4,A-1 直線–24 T-3,T-4 點–3 T-7,A-1 直線–25 T-3,T-4,A-1 點–4 T-3,T-4 直線–26 T-3,T-4,T-5,A-1 點–5 T-3,T-4 直線–27 T-3,T-5
點–6 T-3,T-4 直線–28 T-4,T-5 點–7 T-3,T-4 直線–29 T-4,T-5 點–8 T-3,T-4 直線–30 T-4,T-5 點–9 T-3,T-4 直線–31 T-4,T-5 直線–1 T-1,T-7,A-1 直線–32 T-4,T-5 直線–2 T-1,T-7,A-1 直線–33 T-4,T-5 直線–3 T-1,T-2,T-3,T-4,A-1 直線–34 T-5,T-7,A-1 直線–4 T-1,T-2,T-3,T-4,A-1 直線–35 T-5,T-6,T-7 直線–5 T-1,T-2 直線–37 T-5,T-6,T-7 直線–6 T-1,T-2 直線–38 T-6,T-7,A-1 直線–7 T-1,T-2,T-3 直線–39 T-7,A-1 直線–8 T-1,T-2,T-3 平面–1 T-1,T-7 直線–9 T-1,T-2 平面–2 T-1,T-7
直線–10 T-1,T-2 平面–3 T-1,T-2,T-3,T-4 直線–11 T-1,T-2 平面–4 T-1,T-2,T-3,T-4 直線–12 T-1,T-2,T-3 平面–5 T-1,T-2,T-3
直線–13 T-1,T-2,T-3 平面–6 T-2,T-3,T-4,T-5,T-7 直線–14 T-1,T-2,T-3,T-4 平面–7 T-2,T-3,T-4
直線–15 T-2,T-3 平面–8 T-3,T-4 直線–16 T-2,T-3,T-4 平面–9 T-3,T-4 直線–17 T-2,T-3 平面–10 T-3,T-4 直線–18 T-2,T-3 平面–11 T-3,T-4,T-5 直線–19 T-2,T-3,T-4 平面–12 T-4,A-1 直線–20 T-3,T-4,T-5 平面–13 T-5,T-6,T-7 直線–21 T-3,T-4 平面–14 T-5,T-6,T-7 直線–22 T-3,T-4 平面–15 T-6,T-7 直線–36 T-5,T-6
4. 結論及建議
本研究提出針對光達點雲套合作業中的特 徵萃取與匹配程序,整合點、直線、平面三種幾 何特徵元件建構多特徵萃取機制與多特徵匹配 法,並透過模擬與實際資料驗證演算法成效。實 驗成果顯示特徵萃取機制可在一般都市環境中 有效萃取分布適當且品質良好的幾何特徵,提升 特徵資料處理的彈性與多元性。多特徵匹配法經 由測試驗證在觀測特徵量具有不同品質與分布 條件下皆可有良好的匹配成效與粗差抵抗性,確 立特徵共軛關係並建構近似轉換參數,充分展現 自動化作業效益。
本工作後續研究將擴展不同類型特徵型態 以因應點、直線及平面特徵匱乏之場景。同時,
擬採用可即時進行影像直線偵測的 Edge drawing 演算法(Topal and Akinlar, 2012)取代原程序的 Canny 邊緣線偵測演算法,提升萃取計算效率。
此外,目前多特徵匹配法乃建構於三維相似轉換 模式下,然本工作基於轉換模式之匹配演算法,
應能擴展至其他不同轉換模式之特徵匹配及參 數估計。
致謝
本研究承蒙國科會(現已更名為科技部)專題 研究計畫編號 NSC 100-2221-E-002-216-經費補 助得以順利完成,謹此致謝。
參考文獻
Ackermann, F., 1999. Airborne laser scanning-present status and future expectations. ISPRS Journal of Photogrammetry & Remote Sensing 54:
64-67.
Akca, D., 2007. Least squares 3-D surface matching. Ph.D. Dissertation, Swiss Federal Institute of Technology Zurich, 92p.
Al-Manasir, K., and Fraser, C.S., 2006. Registration of terrestrial laser scanner data using imagery.
Photogrammetric Record, 21(115): 255-268.
Ankerst, M., Kastenmuller, G., Kriegel, H. P., and Seidl, T., 1999. 3-D shape histograms for similarity search and classification in spatial databases. Symposium on Large Spatial Databases, Hong Kong, China. 380, pp.
207-226.
Arun, K.S., Huang, T.S., and Blostein, S.D., 1987.
Least-squares fitting of two 3-D point sets.
Pattern Analysis and Machine Intelligence, PAMI-9(5): 698-700.
Belongie, S., Malik, J., and Puzicha, J., 2001.
Matching shapes. Proceedings of 8th IEEE International Conference on Computer Vision, Vancouver, Canada. 1: 454-461.
Besl, P.J., and McKay, N.D., 1992. A method for registration of 3-D shapes. IEEE Trans. on Pattern Analysis and Machine Intelligence (Los Alamitos, CA, USA: IEEE Computer Society) 14 (2): 239-256.
Böhm, J., and Becker, S., 2007. Automatic marker-free registration of terrestrial laser scans using reflectance features. In:
Proceedings of 8th Conference on Optical 3-D measurement Techniques, Zurich, Switzerland, pp. 338-344.
Canny, J., 1986. A Computational Approach to Edge Detection. IEEE Transactions on Pattern Analysis and Machine Intelligence, 8(6):
679-698.
Chen, D.Y., Tian, X.P., Shen, Y.T., and Ouhyoung, M., 2003. On visual similarity based 3d model retrieval. Computer Graphics Forum, 22(4): 223-232.
Chua, C. S., and Jarvis, R., 1997. Point signatures:
a new representation for 3D object recognition. International Journal of Computer Vision, 25(1): 63-85.
Chuang, T.Y., 2012. Feature-based Registration of LiDAR Point Clouds. Ph.D. Dissertation, National Taiwan University, 117p.
Eo, Y.D., Pyeon, M.W., Kim, S.W., Kim, J.R., and Han, D.Y., 2012. Coregistration of terrestrial LiDAR points by adaptive scale-invariant feature transformation with constrained geometry. Automation in Construction, 25:
49-58.
Filin, S., and Norbert, P., 2006. Segmentation of airborne laser scanning data using a slope adaptive neighborhood. ISPRS Journal of Photogrammetry & Remote Sensing, 60:
71-80.
Gal, R., and Cohen-Or, D., 2006. Salient geometric features for partial shape matching and
similarity. ACM Transaction on Graphics, 25(1): 130-150.
Gelfand, N., Mitra, N. J., Guibas, L. J., and Pottmann, H., 2005. Robust global registration. Proceedings of the 3rd Eurographics Symposium on Geometry Processing. 242, pp. 197-206.
Gorte, B., 2002. Segmentation of TIN-structured surface models. Symposium on Geospatial Theory, Processing and Applications, ISPRS Commission IV, Symposium, Ottawa, Canada.
Han, J.Y., 2010a. Noniterative approach for solving the indirect problems of linear reference frame transformations. Journal of Surveying Engineering, 136(4): 150-156.
Han, J.Y., 2010b. A non-iterative approach for the quick alignment of multistation unregistered LiDAR point clouds. IEEE Geoscience and Remote Sensing Letters, 7(4): 727-730.
Han, J.Y., Tseng, H.P., and Lin, C.T., 2011. Quality assessment for LiDAR point cloud
registration using in-situ conjugate features.
IGARSS 2011, July 25-29, Vancouver, Canada.
Heczko, M., Keim, D., Saupe, D., and Vranic, D.
V., 2002. Methods for similarity search of 3D objects. Datenbank-Spektrum, 2(2):
54-63.
Horn, B.K.P., 1987. Closed-form solution of absolute orientation using unit quaternions.
Journal of the Optical Society of America A, 4(4):629-642.
Horn, B.K.P., Hilden, H.M., and Negahdaripour, S., 1988. Closed-form solution of absolute orientation using orthonormal matrices.
Journal of the Optical Society of America A, 5(7):1127-1135.
Hough, P.V.C., 1962. Methods and means for recognizing complex patterns. U.S. patent No.3069654.
Jaw, J.J., and Chuang, T.Y., 2008. Registration of LiDAR point clouds by means of 3D line features. Journal of the Chinese Institute of Engineers, 31(6): 1031-1045.
Jaw, J.J., and Chuang, T.Y., 2010. On the effectiveness of feature-based LiDAR point cloud registration. Photogrammetric Computer Vision and Image Analysis, ISPRS Comm. III Symposium, 38(Part 3B): 60-65.
Kilian, J., Haala, N., and Englich, M., 1996.
Capture and evaluation of airborne laser scanner data. International Archives of Photogrammetry and Remote Sensing, Vienna, 31(Part B3): 383-388.
Lee, I., 2002. Perceptual Organization of Surfaces.
Ph.D. Dissertation, Graduate Program in Geodetic Science and Surveying, The Ohio State University, Columbus, OH, USA.
Li, X., and Guskov, I., 2005. Multi-scale features for approximate alignment of point-based surfaces. Proceedings of the 3rd Eurographics Symposium on Geometry Processing. 242, pp.
217-226.
Lin, S.H., and Jaw, J.J., 2004. Structuralization of LiDAR point cloud. Proceedings of 25th Asian Conference on Remote Sensing, Chiang Mai, Thailand, 1: 102-107.
Lu, C.P., Hager, G.D., and Mjolsness, E., 2000.
Fast and globally convergent pose estimation from video images. IEEE Transactions on Pattern Analysis and Machine Intelligence, 22(6): 610-622.
Morgan, M., and Habib, A., 2002. Interpolation of LiDAR data and automatic building extraction.
ACSM-ASPRS 2002 Annual Conference Proceedings, 19-26.
OGC, 2013. CityGML. Available:
http://www.ogcnetwork.net/citygml. [Accessed Feb., 2013]
Rabbania, T., van den Heuvelb, F.A., and Vosselman, G., 2006. Segmentation of point clouds using smoothness constraint. ISPRS Commission V Symposium Image Engineering and Vision Metrology, 248-253.
Roggero, M., 2002. Object segmentation with region growing and principal component analysis. Proceeding of the Photogrammetric Computer Vision, ISPRS Symposium Commission III, Graz, Austria, 289-294.
Schuster, H.F., 2004. Segmentation of LiDAR data using the tensor voting framework. ISPRS Congress: Geo-Imagery Bridging Continents, Commission III, CD-ROM.
Topal, C., and Akinlar, C., 2012. Edge Drawing: A combined real-time edge and segment detector.
Journal of Visual Communication and Image Representation. 23(6): 862-872.
Tseng, Y.H., and Wang, M., 2005. Automatic plane extraction from LiDAR data based on octree splitting and merging segmentation. In: 2005 IEEE International Geoscience and Remote Sensing Symposium, 2005. IGARSS'05, 5, pp.3281‐3284.
Umeyama, S., 1991. Least-squares estimation of transformation parameters between two point patterns. Pattern Analysis and Machine Intelligence, 13(4): 376-380.
Vosselman, G., and Dijkman, S., 2001. 3D building model reconstruction from point clouds and ground plans. International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 34(3):37-43.
Vosselman, G., and Maas, H.G., 2001. Adjustment and Filtering of Raw Laser Altimetry Data.
OEEPE Workshop on Airborne Laser scanning and Interferometric SAR for Detailed Digital Elevation Models, Stockholm, 62-73.
Wang, M., and Tseng, Y.H., 2010. Automatic segmentation of LiDAR data into coplanar point clusters using an octree‐based split‐and‐
merge algorithm. Photogrammetric Engineering and Remote Sensing, 76(4), pp.407‐420.
1 Postdoctoral Research Fellow, Department of Civil Engineering, Received Date: Mar. 14, 2014 National Taiwan University Revised Date: Dec. 23, 2015
2 Associate Professor, Department of Civil Engineering, Accepted Date: Feb. 17, 2016 National Taiwan University
*Corresponding Author, Phone: 02-23678645, E-mail: [email protected]
Multi-feature Based Registration of LiDAR Point Clouds
Tzu-Yi Chuang1
Jen-Jer Jaw2*
ABSTRACT
Recently, as the continuing improvements in laser sensors with respect to the scanning rate, ranging limit, resolution, accuracy and systemic efficacy, LiDAR has evolved as a major technique for rapid 3-D geo-information acquisition and also led to many new and fascinating applications of a board range of fields. In regard to LiDAR data processing, registration of point clouds scanned from different stations and platforms is one of essential prerequisites for a uniformity of data quality or forming complete scenes. However, the current ways of registration are mostly achieved by using control targets and require a lot of human intervention.
Therefore, there still remains a great room for bettering the registration task with less labor consume, high efficiency and good quality. Moreover, how to obtain concrete 3-D information from discrete point clouds is also an important issue. Thus, this paper presents a multiple feature extractor and a novel feature matching approach to realize an automated scheme in feature extraction and pairing among LiDAR point clouds. With the successful demonstrations, the combination of the multiple feature extractor and matcher has been verified as a satisfactory working technique to conduct a variety of LiDAR point clouds
Keywords:LiDAR, multiple features, feature extraction, feature matching