Volume 23, No.1, 2018, pp. 1-13 DOI 10.6574/JPRS.201803_23(1).0001
1國立成功大學測量及空間資訊學系 碩士 收到日期:民國 106 年 02 月 22 日
2國立成功大學測量及空間資訊學系 教授 修改日期:民國 107 年 01 月 22 日
* 通訊作者, 電話: E-mail: [email protected] 接受日期:民國 107 年 02 月 12 日
影像式空載光達點雲編碼應用於三維建築模型擷取
陳俋臣
1*林昭宏
2摘要
隨著網際網路 2.0 技術與數位城市模型建置的發展,愈來愈多三維數位模型的創造者,在網路形式 的資料共享平台上分享作品,這些三維數位模型可以應用在許多領域,例如:導航、都市規劃與虛擬實 境。以往重建三維建築模型使用的是攝影測量或點雲資料,但為使資源再利用,本文提出一個三維數位 模型的擷取系統。首先從網際網路收集約 100 萬個三維數位模型,接著用空載光達系統獲取的三維建築 模型點雲,作為查詢的輸入資料,以擷取資料庫中與輸入資料的幾何形狀相似的三維數位模型,再利用 擷取出的三維建築模型,有效率地建造數位城市模型。為了有效地擷取三維數位模型,常見的做法是使 用一個幾何形狀描述子,來編碼資料庫中的三維數位模型,這樣的做法適用於使用三維數位模型作為查 詢資料。然而我們提出的系統,是利用空載光達點雲作為查詢資料。空載光達點雲具有稀疏、雜訊以及 取樣不完整的特性,相關研究的方法無法直接適用於我們的系統,因此我們提出以深度影像和空間直方 圖統計為基礎的編碼方式:利用深度影像描述建築物屋頂面的表面起伏,配合幾何特徵的萃取,將幾何 特徵透過空間直方圖統計得到的係數,作為編碼結果的表達方式。本研究的編碼方式,可以降低由空載 光達點雲資料雜訊衍生的問題,和側面與底面不完整取樣,所帶來的編碼困難度。藉由三維建築模型的 細節層次(Level of Detail, LoD)測試,以及三維數位模型資料庫的資料擷取測試,可證本文提出的方法優 於其他相關的方法,並說明由空載光達點雲資料的編碼擷取三維建築模型,以建構數位城市模型的可行 性。
關鍵詞:點雲編碼、三維模型擷取、空間直方圖統計、數位城市建模
1. 前言
三維城市模型(3D City Model)是一個經過數 位化的城市區域,包含地形起伏、建物、植物與城 市設施,可以應用於許多領域,像是導航、都市規 劃和地理資訊系統,提供資料分析、視覺化、探索 和管理的功能,是非常有用的三維數位資料。近年 來,由於有大量的數位城市建模需求,許多研究專 注於產製三維建築模型的方法,大抵而言,這些相 關研究可以區分為三類。第一類是以人工的方式,
利用現地或既有的建物資訊,逐一產製所需的三維 建築模型,這是最為直覺的方式,也是最有機會產 製正確、完整與豐富細節模型的方式,但顯而易見
的缺點是費時又費工,不利於大量製造;第二類是 利 用 攝 影 測 量 或 是 光 達 (Light Detection and Ranging, LiDAR)的技術,收集三維的空間資訊,
以全自動或半自動的方式,使用這些收集的資訊重 建三維建築模型(Chen et al., 2005);除了上述的兩 類方式,第三類是以資源再利用的概念作為出發點 (Chen et al., 2014),從現有的三維建築模型中找出 合適者作為模型的原型,再依需求進行加工,此類 方式的目標不在於從無到有的模型重建,而是從現 有的三維建築模型中,找出幾何形狀相似的三維建 築模型再利用,本類方法的優點是可以善加利用現 存模型的額外資訊,例如紋理貼圖或同建築的多個 模型,但擷取成果仰賴完整的資料庫,資源較少的
地區較不易擷取到適合的三維建築模型。本研究提 出的方法即屬於第三類的方法,利用現有的三維建 築模型快速建構三維城市模型。
在一座三維城市模型中,建物是最常見的物體,
因此如何獲取或建造三維建築模型是一個很重要 的議題。為了快速獲取大面積場景的三維空間資訊,
光達是經常被使用的工具,配合全球導航衛星系統 (Global Navigation Satellite System, GNSS)和慣性 導航系統(Inertial Navigation System, INS),成為空 載光達(Airborne LiDAR),可以在短時間內有效率 地得到空間中大範圍的三維座標,經常被使用在數 值地形模型產製和數位城市建模(Wilson, 2012)。然 而,從三維座標的點雲重建三維建築模型是不容易 且不穩定的,因為從點雲擷取完好的建物邊緣特徵 是困難的,因此本研究選擇不直接重建模型,而是 利用點雲提供的幾何形狀作為特徵,藉此特徵匹配 幾何形狀相似的三維建築模型,擷取後再重新利 用。
現今的科技發展中,網際網路是一個最基礎且 最容易的資訊傳遞方式,許多網頁型式的應用在短 時間內蓬勃發展,獲得了空前的成功,這些應用背 後的概念都是網際網路 2.0(Web 2.0)。相較於網際 網路 1.0,使用者僅僅透過網路瀏覽網站經營者提 供的內容,網際網路 2.0 注重使用者的資源分享,
使用者不再只是網路資源的瀏覽者,同時也成為網 路資源的提供者,舉例而言,維基百科(Wikipedia) 和 YouTube 都是網際網路 2.0 的成功典範。許多專 為三維建築模型的分享平台也因此誕生,例如 SketchUp 3D Warehouse、Sketchfab 和 Google Earth,
使用者可以將自行創作的三維建築模型分享在這 些平台上,所有網際網路的使用者都可以瀏覽並下 載,達到資源再利用的概念,因此,「如何產製三 維建築模型」的議題,由於網際網路 2.0 的發展,
演變成「如何從三維建築模型資料庫和網際網路中 進行搜尋」──一個三維建築模型擷取的問題。
本研究的目的是發展一個三維建築模型擷取 的方法,使用點雲作為輸入資料。在模型擷取的議 題上,有很多相關研究專注於三維建築模型的編碼 方法,這些方法大致可以分為兩類:以模型為基礎
和以影像為基礎。以模型為基礎的方法是將三維建 築模型的幾何形狀以形狀描述子編碼,常見的形狀 描 述 子 包 含 形 狀 散 佈 圖 (Akgul et al., 2009 ; Assfalg et al., 2007)、球諧函數方程式(Chen et al., 2014; Mademlis et al., 2009);以影像為基礎的方 法是以人類視覺化的角度,將三維建築模型由許多 不同視角的影像代替,由二維的影像描述三維的幾 何形狀,使原來的問題變成影像擷取的議題(Chen et al., 2003;Gao et al., 2011;Gao et al., 2012;
Papadakis et al., 2007;Stavropoulos et al., 2010)。
上述的編碼方法都是以三維建築模型作為對象,並 未考量以空載光達點雲作為對象,由於點雲具有稀 疏、雜訊以及取樣不完整的特性,這些方法無法直 接適用於編碼點雲,因此有研究提出同時編碼點雲 和三維建築模型的方法(Chen et al., 2014),利用光 達模擬器掃描得到三維建築模型的模擬點雲,並填 補原始點雲的側面與底部,以球諧函數方程式表達 近似的幾何形狀,將方程式的係數作為編碼結果,
用於擷取時計算幾何形狀的相似度,由於使用的階 數不高,只能描述很粗略的幾何形狀,因此該編碼 方法可以區別出幾何性狀差異甚大的例子,但是無 法描述微小的建物差異,例如屋頂的突出物、牆面 或水管等,再者,建物如果是中空的形狀也無法正 確描述。
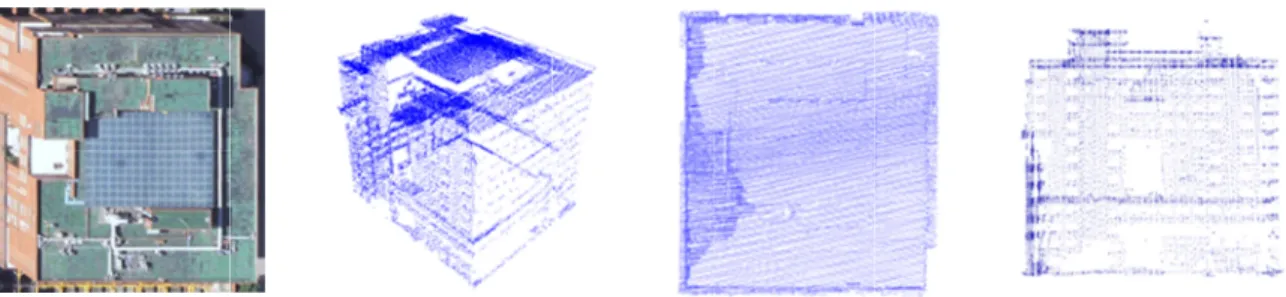
本研究的動機如圖 1 所示,空載光達點雲在建 物屋頂面的分佈較為完整,點雲密度較高,在建物 的側面的部分,點雲則較為稀疏,甚至有未取樣到 的區域,點雲密度也不如屋頂面高,同時,建物的 幾何形狀大部分是以柱狀的方式構成,屋頂面的形 狀和表面起伏是建物很好的辨識特徵,因此本研究 以建物屋頂面做為主要對象,提出以深度影像和空 間統計為基礎的編碼方式:利用深度影像描述建築 物屋頂面的表面起伏,配合幾何特徵的萃取,將幾 何特徵透過空間統計得到的係數,作為編碼結果的 表達方式。本研究的編碼方式,可降低由空載光達 點雲資料雜訊衍生的問題,和側面與底面不完整取 樣,帶來的編碼困難度。
圖 1 建物的正射影象 視角和側面視角
2.1 系統概要
本研究的目的是為了建構一個三維建築模型 的擷取系統
資料編碼與資料擷取 三維數碼模型分別進行編碼 料,也是系統使用者的查詢資料 載光達點雲
而來,每個三維建築模型編碼後 存至資料庫
的空載光達點雲編碼結果與資料庫匹配 資料庫中編碼結果相似的三維建築模型 的結果,
形狀與輸入的點雲最為相似
本文提出的編碼方式稱之為影像式編碼 三大步驟
描述建築物屋頂面的表面起伏 建物的正射影象
視角和側面視角
2. 研究
系統概要
本研究的目的是為了建構一個三維建築模型 的擷取系統,如圖 2 所示
資料編碼與資料擷取。
三維數碼模型分別進行編碼 也是系統使用者的查詢資料
載光達點雲,而三維建築模型是從網際網路上收集 每個三維建築模型編碼後
存至資料庫,等待擷取
的空載光達點雲編碼結果與資料庫匹配 資料庫中編碼結果相似的三維建築模型
,編碼結果最相似的三維建築模型 形狀與輸入的點雲最為相似
本文提出的編碼方式稱之為影像式編碼 三大步驟,如圖 3 所示
描述建築物屋頂面的表面起伏
建物的正射影象(左 1)和空載光達點雲
視角和側面視角,可觀察到空載光達點雲具有稀疏
研究方法
本研究的目的是為了建構一個三維建築模型 所示,此系統分為兩大部分
。資料編碼的部分
三維數碼模型分別進行編碼,點雲是系統的輸入資 也是系統使用者的查詢資料──
而三維建築模型是從網際網路上收集 每個三維建築模型編碼後,
等待擷取;資料擷取的部分 的空載光達點雲編碼結果與資料庫匹配 資料庫中編碼結果相似的三維建築模型 編碼結果最相似的三維建築模型 形狀與輸入的點雲最為相似。
本文提出的編碼方式稱之為影像式編碼 所示。第一步為深度影像 描述建築物屋頂面的表面起伏,此時原始資料的維
和空載光達點雲(左
察到空載光達點雲具有稀疏
圖
方法
本研究的目的是為了建構一個三維建築模型 此系統分為兩大部分 資料編碼的部分,將點雲和
點雲是系統的輸入資
──一個建物的空 而三維建築模型是從網際網路上收集
,會將編碼結果儲 資料擷取的部分,將輸入 的空載光達點雲編碼結果與資料庫匹配,計算出與 資料庫中編碼結果相似的三維建築模型,成為擷取 編碼結果最相似的三維建築模型,其幾何
本文提出的編碼方式稱之為影像式編碼,分為 第一步為深度影像,用於 此時原始資料的維
左 2 到左 4)。
察到空載光達點雲具有稀疏、
圖 2 系統流程圖
本研究的目的是為了建構一個三維建築模型 此系統分為兩大部分:
將點雲和 點雲是系統的輸入資 一個建物的空 而三維建築模型是從網際網路上收集 會將編碼結果儲 將輸入 計算出與 成為擷取 其幾何
分為 用於 此時原始資料的維
度降低 萃取出高度 空間直方圖統計 別進行空間統計 為影像式編碼的結果
2.2
空載光達點雲和三維建築模型 只與幾何形狀有關
的空間座標資訊 形資訊
如圖 光達點雲
三維幾何形狀資訊 的一致性編碼 角色
幾何形狀描述 不完整的特性
。空載光達點雲由左向右依序為透視視角
、雜訊以及取樣不完整的特性
系統流程圖
度降低,由三維降低成二維
萃取出高度、邊緣與面的三種幾何特徵 空間直方圖統計
別進行空間統計 為影像式編碼的結果
2.2 資料前處理
本文的研究材料是兩種截然不同的資料格式 空載光達點雲和三維建築模型
只與幾何形狀有關 的空間座標資訊
形資訊,其餘部分將不納入考慮 如圖 3 最左側所示
光達點雲。資料前處理的目的是用影像的投影擷取 三維幾何形狀資訊
的一致性編碼,資料前處理在本研究扮演很重要的 角色,雖然三維建築模型的資料型態具有很完整的 幾何形狀描述,
不完整的特性,
空載光達點雲由左向右依序為透視視角 雜訊以及取樣不完整的特性
由三維降低成二維;
邊緣與面的三種幾何特徵
空間直方圖統計,將第二步得到的三種幾何特徵分 別進行空間統計,得到一系列的係數
為影像式編碼的結果。
資料前處理
本文的研究材料是兩種截然不同的資料格式 空載光達點雲和三維建築模型
只與幾何形狀有關,因此空載光達點雲只取用三維 的空間座標資訊,三維建築模型只取用頂點與多邊
其餘部分將不納入考慮 最左側所示,上為三維建築模型
資料前處理的目的是用影像的投影擷取 三維幾何形狀資訊,為了達成點雲和三維建築模型 資料前處理在本研究扮演很重要的 雖然三維建築模型的資料型態具有很完整的
,但點雲卻因為稀疏
,完全只有點資訊
空載光達點雲由左向右依序為透視視角 雜訊以及取樣不完整的特性
;第二步為幾何特徵 邊緣與面的三種幾何特徵;
將第二步得到的三種幾何特徵分 得到一系列的係數,這些係數即
本文的研究材料是兩種截然不同的資料格式 空載光達點雲和三維建築模型。由於本研究的編碼
因此空載光達點雲只取用三維 三維建築模型只取用頂點與多邊 其餘部分將不納入考慮。以三維空間顯示
上為三維建築模型,
資料前處理的目的是用影像的投影擷取 為了達成點雲和三維建築模型 資料前處理在本研究扮演很重要的 雖然三維建築模型的資料型態具有很完整的 但點雲卻因為稀疏、雜訊以及取樣 完全只有點資訊,而沒有線或面的 空載光達點雲由左向右依序為透視視角、頂面
第二步為幾何特徵,
;第三步為 將第二步得到的三種幾何特徵分 這些係數即
本文的研究材料是兩種截然不同的資料格式:
由於本研究的編碼 因此空載光達點雲只取用三維 三維建築模型只取用頂點與多邊 以三維空間顯示,
,下為空載 資料前處理的目的是用影像的投影擷取 為了達成點雲和三維建築模型 資料前處理在本研究扮演很重要的 雖然三維建築模型的資料型態具有很完整的 雜訊以及取樣 而沒有線或面的
幾何形狀描述 的幾何形狀描述資訊 相關。
2.2.1 建物屋頂面描述
對於建物的空載光達點雲而言 多資訊量的部分
是最不會有遮蔽且
面,建物的側面幾何形狀變化不大 且常有取樣不完整的狀況
述建物屋頂面的起伏
影像的像素數值呈現了屋頂面 物屋頂面最高高度的差值 數值範圍經過重新等化 面最高高度
組成一張灰階影像
圖 4 從左到右依序為
幾何形狀描述,因此本研究方法的編碼結果 的幾何形狀描述資訊,
建物屋頂面描述
對於建物的空載光達點雲而言 多資訊量的部分,點雲的密度高且完整 是最不會有遮蔽且透空度最佳的區域
建物的側面幾何形狀變化不大 且常有取樣不完整的狀況
述建物屋頂面的起伏,
影像的像素數值呈現了屋頂面 物屋頂面最高高度的差值 數值範圍經過重新等化
面最高高度,255 代表最大高度差 組成一張灰階影像。實際上
從左到右依序為
因此本研究方法的編碼結果
,都與資料前處理的好壞直接
建物屋頂面描述
對於建物的空載光達點雲而言 點雲的密度高且完整
透空度最佳的區域 建物的側面幾何形狀變化不大
且常有取樣不完整的狀況。本研究使用深度影像描
,投影面設定為
影像的像素數值呈現了屋頂面,各水平面位置到建 物屋頂面最高高度的差值,為了便於顯示
數值範圍經過重新等化,0 代表無高度差 代表最大高度差
實際上,對於點雲和三維建築
從左到右依序為:空載光達點雲的透視視角 因此本研究方法的編碼結果,承載 都與資料前處理的好壞直接
對於建物的空載光達點雲而言,屋頂面是有較 點雲的密度高且完整,因為屋頂 透空度最佳的區域;相較於屋頂 建物的側面幾何形狀變化不大,點雲的密度低 本研究使用深度影像描 投影面設定為 X-Y 平面
各水平面位置到建 為了便於顯示,像素的 代表無高度差,即屋頂 代表最大高度差,即地面高度
對於點雲和三維建築
圖 3 本文提出的影像式編碼
空載光達點雲的透視視角 深度影像
承載 都與資料前處理的好壞直接
屋頂面是有較 因為屋頂 相較於屋頂 點雲的密度低 本研究使用深度影像描 平面,
各水平面位置到建 像素的 即屋頂 即地面高度,
對於點雲和三維建築
模型而言 過程 題,
格化中的網格大小 有很大的關係 度影像
隙產生的機會增加
格尺寸大會使空隙產生的機會減少 解析度降低
本文的目標為每一網格至少有一個點雲 驗對象的點雲密度推算
公尺 未取樣區塊 填補缺失的資訊 4 所示
本文提出的影像式編碼
空載光達點雲的透視視角、頂面視角
模型而言,產生深度影像是一個規則網格化的取樣 過程,三維建築模型本身是向量格式
,但點雲本身是不規則取樣的點陣格式 格化中的網格大小
有很大的關係。網格尺寸小可以產生高解析度的深 度影像,帶有更完整的高度起伏描述
隙產生的機會增加
格尺寸大會使空隙產生的機會減少
解析度降低,高度起伏描述的細節可能會被忽略 本文的目標為每一網格至少有一個點雲
驗對象的點雲密度推算
公尺。此外,由於上述的方法無法消除較大面積的 未取樣區塊,因此本文採用影像處理的形態學技術 填補缺失的資訊
所示。
本文提出的影像式編碼
頂面視角、原始深度影像 幾何特徵
產生深度影像是一個規則網格化的取樣 三維建築模型本身是向量格式
但點雲本身是不規則取樣的點陣格式
格化中的網格大小,會與空載光達點雲的取樣密度 網格尺寸小可以產生高解析度的深 帶有更完整的高度起伏描述
隙產生的機會增加,需要額外的內插進行填補 格尺寸大會使空隙產生的機會減少
高度起伏描述的細節可能會被忽略 本文的目標為每一網格至少有一個點雲
驗對象的點雲密度推算,將網格大小設定為 由於上述的方法無法消除較大面積的 因此本文採用影像處理的形態學技術 填補缺失的資訊,得到較為完整的深度影像
原始深度影像、經過影像處理的深度影像 產生深度影像是一個規則網格化的取樣 三維建築模型本身是向量格式,不會產生問 但點雲本身是不規則取樣的點陣格式
會與空載光達點雲的取樣密度 網格尺寸小可以產生高解析度的深 帶有更完整的高度起伏描述,但會導致空
需要額外的內插進行填補 格尺寸大會使空隙產生的機會減少,但深度影像的
高度起伏描述的細節可能會被忽略 本文的目標為每一網格至少有一個點雲,
將網格大小設定為 由於上述的方法無法消除較大面積的 因此本文採用影像處理的形態學技術
得到較為完整的深度影像
經過影像處理的深度影像 空間直方圖
統計
產生深度影像是一個規則網格化的取樣 不會產生問 但點雲本身是不規則取樣的點陣格式,規格網 會與空載光達點雲的取樣密度 網格尺寸小可以產生高解析度的深 但會導致空 需要額外的內插進行填補;網 但深度影像的 高度起伏描述的細節可能會被忽略。
,因此由實 將網格大小設定為 0.25 由於上述的方法無法消除較大面積的 因此本文採用影像處理的形態學技術,
得到較為完整的深度影像,如圖
經過影像處理的深度影像 空間直方圖
2.2.2 中心點選擇
中心點選擇是資料前處理的另外一項議題 文的編碼方式其中一個步驟為空間直方圖統計 要一個一致且可靠的中心點
載光達點雲以及三維建築模型 相關文獻
(Minimal Bounding Box) 做法會因不同的水平旋轉方向 變,而有不同的中心點 像是 2.5D
因此本文採用三維的質量中心 ( , )
D x y,
0 0
( ,x y ) ( , )
式(1) 深度值D x y
值。圖 5 為同一建物在不同的水平旋轉方向的深度 影像,可以看出本文使用的方法較為一致且穩定 不會受到深度影像的產製與水平方向邊框的影 響。
2.3 幾何特徵
本研究使用深度影像描述建物屋頂面的起伏 為了進一步描述幾何特徵
三種不同的幾何特徵
圖 5 原點決定示意圖 邊框的中心
中心點選擇
中心點選擇是資料前處理的另外一項議題 文的編碼方式其中一個步驟為空間直方圖統計 要一個一致且可靠的中心點
載光達點雲以及三維建築模型 相關文獻(Chen et al., 2014) (Minimal Bounding Box) 做法會因不同的水平旋轉方向
而有不同的中心點 2.5D 的描述方式,
因此本文採用三維的質量中心 ( , )
D x y,中心點定義為
0 0
1
( , ) 1 ( , )
n
k
x y n
(1)的 n 為深度影像像素總數 ( k, k)
D x y ,作為像素水平位置
為同一建物在不同的水平旋轉方向的深度 可以看出本文使用的方法較為一致且穩定 不會受到深度影像的產製與水平方向邊框的影
幾何特徵
本研究使用深度影像描述建物屋頂面的起伏 為了進一步描述幾何特徵
三種不同的幾何特徵:
原點決定示意圖 邊框的中心
中心點選擇
中心點選擇是資料前處理的另外一項議題 文的編碼方式其中一個步驟為空間直方圖統計 要一個一致且可靠的中心點,為了從相同建物的空 載光達點雲以及三維建築模型,決定一致的原點
, 2014)的做法是使用最小邊框 (Minimal Bounding Box)的中心點作為原點 做法會因不同的水平旋轉方向,導致最小邊框的改
而有不同的中心點。由於本文所使用的深度影 的描述方式,同時建物也是實心的物體 因此本文採用三維的質量中心,
中心點定義為( ,x y0 0),其計算方式如下
1
( , ) 1 ( k, )
n
k
k Dk
n x y
為深度影像像素總數 作為像素水平位置
為同一建物在不同的水平旋轉方向的深度 可以看出本文使用的方法較為一致且穩定 不會受到深度影像的產製與水平方向邊框的影
本研究使用深度影像描述建物屋頂面的起伏 為了進一步描述幾何特徵,本文從深度影像萃取出
:高度特徵、線特徵與面特徵
原點決定示意圖,四個不同水平旋轉方向的深度影像 中心點選擇是資料前處理的另外一項議題
文的編碼方式其中一個步驟為空間直方圖統計 為了從相同建物的空
決定一致的原點 的做法是使用最小邊框 的中心點作為原點,但此 導致最小邊框的改 由於本文所使用的深度影 同時建物也是實心的物體
,假設深度影像為 ( , ) 其計算方式如下
( , ) ( , k)Dk ...
為深度影像像素總數;Dk代表像素 作為像素水平位置( ,x yk k)的權 為同一建物在不同的水平旋轉方向的深度 可以看出本文使用的方法較為一致且穩定 不會受到深度影像的產製與水平方向邊框的影
本研究使用深度影像描述建物屋頂面的起伏 本文從深度影像萃取出
線特徵與面特徵
四個不同水平旋轉方向的深度影像 中心點選擇是資料前處理的另外一項議題,本
文的編碼方式其中一個步驟為空間直方圖統計,需 為了從相同建物的空 決定一致的原點,
的做法是使用最小邊框 但此 導致最小邊框的改 由於本文所使用的深度影 同時建物也是實心的物體,
假設深度影像為 其計算方式如下:
... (1)
代表像素 ( ,x y )的權 為同一建物在不同的水平旋轉方向的深度 可以看出本文使用的方法較為一致且穩定,
不會受到深度影像的產製與水平方向邊框的影
本研究使用深度影像描述建物屋頂面的起伏,
本文從深度影像萃取出 線特徵與面特徵,
示意圖如圖
2.3.1
的垂直高度差
像素值代表建物在空間中 愈亮的區塊代表高度 如圖
2.3.2
組成
徵適合用來描述屋頂面的幾何形狀 而言
本文使用 邊緣偵測 的雜訊影響 如圖
2.3.3
像中萃取面特徵
集合計算區域的幾何特性 的經驗
訊的影響下
選擇面特性作為此部分描述屋頂面的面特徵 中灰階較亮的部分即代表面特徵
示,
四個不同水平旋轉方向的深度影像
示意圖如圖 6。
2.3.1 高度特徵
高度特徵描述屋頂面在不同位置與最大高度 的垂直高度差,
像素值代表建物在空間中 愈亮的區塊代表高度 如圖 7 左二欄所示
2.3.2 線特徵
建物的幾何結構一般是由多個不同幾何形狀 組成,而這些幾何形狀的基本組成是線
徵適合用來描述屋頂面的幾何形狀
而言,線特徵的萃取相當於影像的邊緣偵測 本文使用 LoG (Laplacian of Gaussian)
邊緣偵測,其中的高斯模糊可以降低點雲深度影像 的雜訊影響,影像中灰階較亮的部分即代表線特徵 如圖 7 左三欄所示
2.3.3 面特徵
平面是建物屋頂面常見的特徵 像中萃取面特徵
集合計算區域的幾何特性 的經驗,相較於線特性和球特性
訊的影響下,描述的資訊與三維模型較接近 選擇面特性作為此部分描述屋頂面的面特徵 中灰階較亮的部分即代表面特徵
,用符號e x y ,
四個不同水平旋轉方向的深度影像,紅色圓點為三維質量中心
高度特徵
高度特徵描述屋頂面在不同位置與最大高度
,其結果等同於深度影像 像素值代表建物在空間中 Z
愈亮的區塊代表高度差愈大,
左二欄所示,用符號
線特徵
建物的幾何結構一般是由多個不同幾何形狀 而這些幾何形狀的基本組成是線
徵適合用來描述屋頂面的幾何形狀
線特徵的萃取相當於影像的邊緣偵測 LoG (Laplacian of Gaussian)
其中的高斯模糊可以降低點雲深度影像 影像中灰階較亮的部分即代表線特徵 左三欄所示,用符號l x y
面特徵
平面是建物屋頂面常見的特徵
像中萃取面特徵,本文使用主成份分析方法 集合計算區域的幾何特性:線
相較於線特性和球特性
描述的資訊與三維模型較接近 選擇面特性作為此部分描述屋頂面的面特徵 中灰階較亮的部分即代表面特徵
,
e x y 代表。
紅色圓點為三維質量中心
高度特徵描述屋頂面在不同位置與最大高度 其結果等同於深度影像,
Z 軸的高度變化
,反之則高度
,
h x y 代表。
建物的幾何結構一般是由多個不同幾何形狀 而這些幾何形狀的基本組成是線,
徵適合用來描述屋頂面的幾何形狀。對於深度影像 線特徵的萃取相當於影像的邊緣偵測
LoG (Laplacian of Gaussian)運算子進行 其中的高斯模糊可以降低點雲深度影像 影像中灰階較亮的部分即代表線特徵
,
l x y 代表。
平面是建物屋頂面常見的特徵,為了從深度影 本文使用主成份分析方法
線、面和球,
相較於線特性和球特性,面特性在點雲雜 描述的資訊與三維模型較接近 選擇面特性作為此部分描述屋頂面的面特徵 中灰階較亮的部分即代表面特徵,如圖 7
紅色圓點為三維質量中心,綠點圓點為最小 高度特徵描述屋頂面在不同位置與最大高度
,影像中的 軸的高度變化,灰階 反之則高度差愈小,
。
建物的幾何結構一般是由多個不同幾何形狀
,因此線特 對於深度影像 線特徵的萃取相當於影像的邊緣偵測,因此 運算子進行 其中的高斯模糊可以降低點雲深度影像
影像中灰階較亮的部分即代表線特徵,
。
為了從深度影 本文使用主成份分析方法,從點
,依據本文 面特性在點雲雜 描述的資訊與三維模型較接近,因此 選擇面特性作為此部分描述屋頂面的面特徵,影像 7 左四欄所
綠點圓點為最小
圖 7
圖 8
2.4 空間直方圖統計
為了進一步編碼 空間直方圖統計
圖
7 幾何特徵,
8 空間直方圖統計示意圖
空間直方圖統計
為了進一步編碼
空間直方圖統計,將高度特徵
圖 6 幾何特徵示意圖
,從左到右依序為
空間直方圖統計示意圖
空間直方圖統計
為了進一步編碼 2.3 節的幾何特徵
將高度特徵、線特徵以及面特徵 1
幾何特徵示意圖,從左到右依序為
從左到右依序為:三維建築模型和空載光達點雲
空間直方圖統計示意圖,左為幾何特徵圖疊加若干圓環
節的幾何特徵,本文採用 線特徵以及面特徵
2 3 4 5 6 7 8
從左到右依序為
三維建築模型和空載光達點雲
左為幾何特徵圖疊加若干圓環
本文採用 線特徵以及面特徵
進行空間直方圖統計 心點
法最主要的原因 8 所示
Histogram (%)
8 9 10
從左到右依序為:高度特徵
三維建築模型和空載光達點雲、
左為幾何特徵圖疊加若干圓環,右為對應圓環區域的直方統計結果
進行空間直方圖統計
心點,此方法可以達成旋轉不變性 法最主要的原因
所示,首先會從建物的中心點 1 2 3 4
Histogram (%)
高度特徵、線特徵和面特徵
、高度特徵、
右為對應圓環區域的直方統計結果
進行空間直方圖統計,只要能決定一致且穩定的中 此方法可以達成旋轉不變性
法最主要的原因,亦為優點。
首先會從建物的中心點 5 6 7 8
線特徵和面特徵
、線特徵和面特徵
右為對應圓環區域的直方統計結果
只要能決定一致且穩定的中 此方法可以達成旋轉不變性,這是採用此方
。空間直方圖統計如圖 首先會從建物的中心點,到建物最外側的
High
Low
9 10
線特徵和面特徵
右為對應圓環區域的直方統計結果
只要能決定一致且穩定的中 這是採用此方 空間直方圖統計如圖 到建物最外側的
High
Low
水平距離決定圓的半徑,劃分出若干圓環的區域,
接著將各圓環區域內的幾何特徵值分別累加,假設 圓環的數量為 k,則一張深度影像的三種不同幾何 特徵,可以得到三組長度為 k 的向量,其各別的數 值代表該圓環內的幾何特徵強度。為了將數值大小 標準化,各直方的數值除以環狀區域的總面積,與 直方所有數值的總和,成為百分比的表示法。如果 圓環的數量太小,則統計的資訊量不足;如果太大,
則容易受到點雲雜訊的影響,本文經由實驗分析,
將 k 值設定為 30,兼顧足夠的資訊量與抵抗雜訊 的能力。空間直方圖統計的結果描述如下:
1, , k , 1, , k , 1, , k
SH h h l l e e ... (2)
其中h1,,hk、l1,,lk與e1,,ek分別 代表高度特徵、線特徵以及面特徵,每一元素均為 範圍 0 到 1 的百分比,k 為直方統計的數量,數值 為 30,故 SH 向量元素總數為 90。
2.5 不變尺度編碼
上述的空間直方圖統計結果,提供建物屋頂面 起伏的幾何特徵描述,為了更進一步分辨屋頂面起 伏相似、但建物高度與尺寸大小不同的狀況,本文 使用不變尺度編碼,提供建物基本空間屬性的描述,
包含以下三者:建物的最大高度,等同深度影像中 最大的高度差,以 BH 表示;建物水平面的最大半 徑,等同中心點到建物最外側的水平距離,以 BR 表示;建物的屋頂面總面積,等同深度影像中建物 所佔的像素數量總和,以 BA 表示。
2.6 編碼與排序
結合所有幾何特徵的空間直方圖統計結果,空 載光達點雲或三維建築模型可表示為:
1 1, , k , 1, , k , 1, , k
F S l l h h e e ... (3)
其中 h、i 和 e 分別為高度特徵、線特徵以及 面特徵;k 為直方統計的數量,設為 30。結合不變 尺度編碼的結果,空載光達點雲或三維建築模型可
表示為:
2 , ,
F S BH BR BA ... (4)
其中 BH、BR 和 BA 分別為建物的最大高度、
水平面的最大半徑和屋頂面總面積。將式(3)和式(4) 的編碼結果結合,空載光達點雲和三維建築模型的 相似度可由其對應的編碼差異度表示為:
2 2
1 1
2
, 1 F F
dist F F
F
P M
P M P M
P
.. (5)
其中 F1和 F2分別為式(3)和式(4);P 和 M 可 為空載光達點雲或三維建築模型;dist 為差異度,
表示 P 和 M 的幾何形狀差異程度,在本文視作相 似度指標,dist 愈大代表 P 和 M 愈不相似,反之,
dist 愈小代表 P 和 M 愈相似,如果 dist 等於 0 則 代表 P 和 M 完全相同。本文提出的系統,即是計 算輸入的點雲資料和資料庫中所有的三維建築模 型,將所有三維建築模型的 dist 值進行排序,dist 值最小的三維建築模型即為擷取的目標。
3. 實驗成果與分析
3.1 實驗資料與計算速度
本文系統使用的資料庫,共包含 100 萬筆三維 建築模型,從網際網自動收集而來。實驗區域為國 立成功大學以及台北 101,國立成功大學的部分如 圖 9 所示,空載光達點雲於 2011 使用 Optech ALTM 30/70 系統取得,平均點雲密度為 10.72(點/平方公 尺)。本文系統使用 Intel Xeon E5-1620 3.5Ghz 的中 央處理器,40GB 的記憶體,以及 NVIDIA GeForce GTX 650 Ti BOOST 的圖形處理器,利用 CPU 與 GPU 的平行處理技術,運算一個 22440 點的空載 光達點雲,占地面積 2000 平公公尺,僅需要 150 毫秒進行編碼,600 毫秒進行擷取,全部的處理時 間可少於 1 秒鐘。表 1 紀錄實驗資料的各項數據,
包含點雲總數、占地面積、點雲密度、網格大小以 及計算速度。
點雲
3.2 實驗成果
實驗分為兩部分 細節層次
型的幾何複雜程度 有細微的幾何描述
低 LoD 代表三維建築模型具有的幾何描述少 簡化之程度愈高
證本文提出的編碼方式 程度的三維建築模型 述建物的幾何形狀 證本文提出的編碼方式
力,是否能從資料庫中找出理想的結果 關研究的方法
3.2.1 細節層次測試
本文以兩棟國立成功大學的系館作為實驗對 象,分別是成功校區的物理二館以及自強校區的電
表 1 點雲 點雲總數
50843
183719 26077
55061
29698
實驗成果
實驗分為兩部分:
細節層次(Level of Detail, LoD) 型的幾何複雜程度,高
有細微的幾何描述,通常與真實建物的相似度愈高 代表三維建築模型具有的幾何描述少 簡化之程度愈高。細節層次測試的目的 證本文提出的編碼方式
程度的三維建築模型,
述建物的幾何形狀。資料庫測試的目的 證本文提出的編碼方式
是否能從資料庫中找出理想的結果 關研究的方法,比較擷取能力的差異
細節層次測試
本文以兩棟國立成功大學的系館作為實驗對 分別是成功校區的物理二館以及自強校區的電
圖 9 實驗區域
1 各實驗資料的點雲總數 點雲總數
( 50843
183719 26077
55061
29698
:細節層次測試與資料庫測試 (Level of Detail, LoD)為描述三維建築模 高 LoD 代表三維建築模型具 通常與真實建物的相似度愈高 代表三維建築模型具有的幾何描述少
細節層次測試的目的
證本文提出的編碼方式,是否能分辨不同幾何複雜
,證明編碼方式可以有效地描 資料庫測試的目的
證本文提出的編碼方式,對於巨量資料庫的擷取能 是否能從資料庫中找出理想的結果
比較擷取能力的差異
細節層次測試
本文以兩棟國立成功大學的系館作為實驗對 分別是成功校區的物理二館以及自強校區的電
實驗區域:國立成功大學
各實驗資料的點雲總數、
占地面積 (平方公尺)
3050.1
9848.6 2141.750
3829.500
1342.438
細節層次測試與資料庫測試 為描述三維建築模 代表三維建築模型具 通常與真實建物的相似度愈高 代表三維建築模型具有的幾何描述少,
細節層次測試的目的,是為了驗 是否能分辨不同幾何複雜 證明編碼方式可以有效地描 資料庫測試的目的,是為了驗 對於巨量資料庫的擷取能 是否能從資料庫中找出理想的結果,同時與相
比較擷取能力的差異。
本文以兩棟國立成功大學的系館作為實驗對 分別是成功校區的物理二館以及自強校區的電
國立成功大學,左為空拍影像
、占地面積、
點雲密度
16.67
18.65 12.18
14.38
22.12
細節層次測試與資料庫測試。
為描述三維建築模 代表三維建築模型具 通常與真實建物的相似度愈高;
,其 是為了驗 是否能分辨不同幾何複雜 證明編碼方式可以有效地描 是為了驗 對於巨量資料庫的擷取能 同時與相
本文以兩棟國立成功大學的系館作為實驗對 分別是成功校區的物理二館以及自強校區的電
機 系 館 Warehouse
的主要特徵為建物中間的透空區域 一個環形
館的原始三維建築模型如圖
出部分和中間透空部分並沒有正確呈現 四個具有不同程度細節的三維建築模型 載光達點雲對應的相似度數值
一個正立方體
並且有女兒牆和許多大型管狀物 始三維建築模型如圖
有正確呈現 維建築模型 值。
的三維建築模型
代表本文提出的編碼能有效地描述建物的幾何形 狀。
左為空拍影像,
、點雲密度、網格大小以及計算速度 點雲密度 網格大小
0.245
0.232 0.287
0.264
0.212
機 系 館 , 所 使 用 的 三 維 建 築 模 型 皆 取 自 Warehouse,並自行編輯成為不同
的主要特徵為建物中間的透空區域 一個環形,在透空的部分還有一個小平台 館的原始三維建築模型如圖
出部分和中間透空部分並沒有正確呈現 四個具有不同程度細節的三維建築模型 載光達點雲對應的相似度數值
一個正立方體,在屋頂面有一些不同高度的平面 並且有女兒牆和許多大型管狀物
始三維建築模型如圖 有正確呈現,圖
維建築模型,以及與空載光達點雲對應的相似度數
。圖 11 和圖 13 的三維建築模型
代表本文提出的編碼能有效地描述建物的幾何形
。
,右為點雲展示圖
網格大小以及計算速度 網格大小
編碼 0.245 155
0.232 413 0.287 155
0.264 205
0.212 155
所 使 用 的 三 維 建 築 模 型 皆 取 自 並自行編輯成為不同
的主要特徵為建物中間的透空區域 在透空的部分還有一個小平台 館的原始三維建築模型如圖
出部分和中間透空部分並沒有正確呈現 四個具有不同程度細節的三維建築模型 載光達點雲對應的相似度數值
在屋頂面有一些不同高度的平面 並且有女兒牆和許多大型管狀物
始三維建築模型如圖 12 所示
圖 13 為五個具有不同程度細節的三 以及與空載光達點雲對應的相似度數
13 的結果均顯示
的三維建築模型,與空載光達點雲有最高的相似度 代表本文提出的編碼能有效地描述建物的幾何形
右為點雲展示圖
網格大小以及計算速度 計算速度 編碼(毫秒) 擷取
155
413 155
205
155
所 使 用 的 三 維 建 築 模 型 皆 取 自 並自行編輯成為不同 LoD。
的主要特徵為建物中間的透空區域,從頂面看像是 在透空的部分還有一個小平台
館的原始三維建築模型如圖 10 所示,屋頂面的突 出部分和中間透空部分並沒有正確呈現,
四個具有不同程度細節的三維建築模型,
載光達點雲對應的相似度數值。電機系館的外觀像 在屋頂面有一些不同高度的平面 並且有女兒牆和許多大型管狀物體。電機系館的原
所示,一些微小的細節沒 為五個具有不同程度細節的三 以及與空載光達點雲對應的相似度數 的結果均顯示,愈接近真實建物 與空載光達點雲有最高的相似度 代表本文提出的編碼能有效地描述建物的幾何形
計算速度
擷取(毫秒) 606
597 579
637
606
所 使 用 的 三 維 建 築 模 型 皆 取 自 3D
。物理二館 從頂面看像是 在透空的部分還有一個小平台。物理二 屋頂面的突
,圖 11 為
,以及與空 電機系館的外觀像 在屋頂面有一些不同高度的平面,
電機系館的原 一些微小的細節沒 為五個具有不同程度細節的三 以及與空載光達點雲對應的相似度數 愈接近真實建物 與空載光達點雲有最高的相似度,
代表本文提出的編碼能有效地描述建物的幾何形
圖 10
圖 11 具有不同程度細節的物理二館三維建築模型 的細節
圖 12
圖 13 具有不同程度細節的電機系館三維建築模型 的細節
10 實驗建物
具有不同程度細節的物理二館三維建築模型 的細節,也愈接近真實建物
12 實驗建物
細節 3:
具有不同程度細節的電機系館三維建築模型 的細節,也愈接近真實建物
實驗建物 1:物理二館
細節 1:1.024
細節 3:0.718
具有不同程度細節的物理二館三維建築模型 也愈接近真實建物
實驗建物 2:電機系館
細節 1:1.150
:0.552
具有不同程度細節的電機系館三維建築模型 也愈接近真實建物
物理二館,從左到右分別為
1.024
0.718
具有不同程度細節的物理二館三維建築模型
也愈接近真實建物,編號後的數值為本文編碼方式提供的相似度
電機系館,從左到右分別為
1.150
細節 具有不同程度細節的電機系館三維建築模型
也愈接近真實建物,編號後的數值為本文編碼方式提供的相似度 從左到右分別為航空影像
具有不同程度細節的物理二館三維建築模型,紅色標記部分為主要差異區塊 編號後的數值為本文編碼方式提供的相似度
從左到右分別為航空影像
細節 4:0.267
具有不同程度細節的電機系館三維建築模型,紅色標記部分為主要差異區塊 編號後的數值為本文編碼方式提供的相似度
影像、空載光達點雲透視圖和原始三維建築模型
細節
細節
紅色標記部分為主要差異區塊 編號後的數值為本文編碼方式提供的相似度
影像、空載光達點雲透視圖和原始三維建築模型
細節
0.267
紅色標記部分為主要差異區塊 編號後的數值為本文編碼方式提供的相似度
空載光達點雲透視圖和原始三維建築模型
細節 2:0.905
細節 4:0.349 紅色標記部分為主要差異區塊 編號後的數值為本文編碼方式提供的相似度 dist
空載光達點雲透視圖和原始三維建築模型
細節 2:0.985
細節 5 紅色標記部分為主要差異區塊 編號後的數值為本文編碼方式提供的相似度 dist
空載光達點雲透視圖和原始三維建築模型
0.905
0.349
紅色標記部分為主要差異區塊,編號愈高具有愈多 dist
空載光達點雲透視圖和原始三維建築模型
0.985
5:0.205
紅色標記部分為主要差異區塊,編號愈高具有愈多 dist
空載光達點雲透視圖和原始三維建築模型
編號愈高具有愈多
空載光達點雲透視圖和原始三維建築模型
編號愈高具有愈多
3.2.2 資料庫測試
本研究的系統需要一個三維建築模型的資料 庫,因此從網際網路收集許多三維建築模型,總數 量約為 100 萬筆,建構資料庫後供查詢使用。資料 庫測試除了本文的編碼方法(方法 A),同時與相關 研究(方法 B)進行同實驗的結果比較,該方法利用 球諧函數方程式進行編碼(Chen et al., 2014)。共有 三棟建物作為實驗對象,分別為國立成功大學的測 量系館、台南遠東百貨以及台北 101 大樓,本實驗 利用兩個系統:方法 A 和方法 B,各自找出相似 度排序前 10 名的三維建築模型,評估系統的擷取 能力,結果如圖 14 所示。由於兩系統擷取的結果 可能包含一樣的模型,因此將兩系統的結果取聯集,
去除同樣的模型,再將點雲和所有三維建築模型進 行逐一對位,對位的方法是常見的對位演算法 ICP(Besl et al., 1992),以計算所得之均方根誤差 (RMSE)做為相似度的真值,進而得到相似度的真
實排序(RMSE Rank),並與系統查詢的排序(Result Rank)做比較。本文利用兩個指標做為成果好壞的 表示,第一個為均方根誤差的平均(RMSE Avg.),
數值愈低代表查詢的結果愈好;第二個為真實排名 差值的總和(Rank Diff. Sum),表達系統排序與真實 相似度排序的差異,數值同樣愈低代表排序的愈好。
探討此項測試的結果,以台北 101 大樓為例,這棟 建築的側邊牆面為斜面,具有特殊性,方法 A 只 考量屋頂面的幾何,因此失去建築的側邊資訊,而 方法 B 雖然使用所有點雲進行編碼,但因為點雲 稀疏、雜訊以及取樣不完整的特性,編碼的結果只 能描述粗略的幾何形狀,不但無法精細描述該建築 的特殊牆面,同時屋頂面的幾何也無法有良好的描 述,因此台北 101 大樓的結果,本文的方法明顯優 於相關研究的方法。綜合而言,由表 2 和表 3 的 結果可以得知,本文提出的編碼方法在兩個評估的 指標,均優於相關研究的方法。
表 2 方法 A 的資料庫測試結果統計
方法 A
建物 1 建物 2 建物 3
Result
Rank
RMSE RMSE RankRank
Diff. RMSE RMSE Rank
Rank
Diff. RMSE RMSE Rank
Rank Diff.
1
0.383 1 0 2.157 1 0 3.603 7 62
2.150 9 7 7.175 12 10 2.066 3 13
2.071 7 4 8.404 15 12 2.066 3 04
2.377 14 10 5.825 4 0 1.967 2 25
2.228 12 7 7.600 13 8 1.901 1 46
1.403 2 4 5.957 6 0 3.870 9 37
1.908 6 1 5.959 7 0 3.869 8 18
2.468 16 8 5.959 7 1 4.081 10 29
1.591 3 6 6.041 9 0 4.081 10 110
2.300 13 3 7.174 11 1 3.100 6 4RMSE
Avg.
1.888 6.225 3.060Rank Diff.
Sum
50 32 24Result Rank
1 2 3 4 5 6 7 8 9 10 RMSE
Avg.
Rank Diff.
Sum Result
Rank
RMSE 0.383 1.874 2.209 2.213 3.477 3.819 2.439 1.907 2.496 2.079RMSE
Rank Diff.
建物 1 RMSE RMSE Rank 0.383 1 1.874 4 2.209 10 2.213 11 3.477 18 3.819 19 2.439 15 1.907 5 2.496 17 2.079 8
2.290 63
表 3 方法 B
Rank Diff.
0 2 7 7 13 13 8 3 8 2
圖 14
B 的資料庫測試結果統計
方法 B
建物 RMSE RMSE
Rank 2.157
5.839 5.206 8.883 8.515 7.644 6.996 9.336 5.143 10.418
7.014
14 資料庫測試結果 的資料庫測試結果統計
建物 2 RMSE Rank
Rank Diff.
1 0 5 3 3 0 17 13 16 11 14 8 10 3 18 10 2 7 19 9 7.014
64
資料庫測試結果
Rank
Diff. RMSE 4.945 4.945 2.258 13 4.081 11 5.650 6.596 5.589 10 6.326 5.297 5.297
建物 3 RMSE RMSE Rank
13 12 5 10 17 19 16 18 14 5.297 14 5.098
83
Rank Diff.
12 10 2 6 12 13 9 10
5 4
4. 結論與建議
本研究提出一個適用建物點雲的編碼方法,以 建構三維數位建物模型的擷取系統,使用空載光達 點雲作為輸入資料。經由實驗分析,本研究的方法 可以一致並精確地編碼空載光達點雲以及三維建 築模型,同時擁有 XY 平面的旋轉不變性和抵抗點 雲雜訊的能力。為了評估本研究與相關研究的方法 差異,本研究進行兩個實驗,分別是細節層次測試 與資料庫測試,實驗結果顯示本研究的方法可區別 不同細節層次的三維建築模型,並且能在巨量資料 庫中擷取出理想的結果,可證本研究方法的有效性 與準確性。同時,我們也建構出一個網頁型式的三 維建築模型擷取系統,相當於三維建築模型的搜尋 系統,使用者可以透過此系統,擷取與輸入點雲幾 何形狀相似的三維建築模型,查看原始出處或下載 後再利用。
本研究提出的方法假設建物為實心的柱狀物 體,目前僅利用建物屋頂面資訊做為主要編碼對象,
建物的側面資訊並未納入考量,未來可以將建物側 面的幾何形狀與尺寸加入考慮,對建物的整體形狀 與大小能有更精確地描述,進而提升擷取的準確 性。
參考文獻
Akgul, C.B., Sankur, B., Yemez, Y., and Schmitt, F., 2009. 3D model retrieval using probability density-based shape descriptors, IEEE Transactions on Pattern Analysis And Machine Intelligence, 31(6): 1117-1133.
Assfalg, J., Bertini, M., Del Bimbo, A., and Pala, P., 2007. Content-based retrieval of 3-D objects using spin image signatures, IEEE Transactions on Multimedia, 9(3): 589-599.
Besl, P.J., and McKay, N.D., 1992. A method for registration of 3-D shapes, IEEE Transactions on Pattern Analysis and Machine Intelligence, 14(2): 239-256.
Chen, D.-Y., Tian, X.-P., Shen, Y.-T. and Ouhyoung, M., 2003. On visual similarity based 3D model retrieval, Computer Graphics Forum, 22(3):
223-232.
Chen, J.-Y., Lin, C.-H., Hsu, P.-C., and Chen, C.-H., 2014. Point cloud encoding for 3D building model retrieval, IEEE Transactions on Multimedia, 16(2): 337-345.
Chen, L.-C., Teo, T.-A., Rau, J.-Y., Liu, J.-K., and Hsu, W.-C., 2005. Building reconstruction from LIDAR data and aerial imagery, International Geoscience and Remote Sensing Symposium (IGARSS), 4: 2846-2849, Korea.
Gao, Y., Tang, J.H., Hong, R.C., Yan, S.C., Dai, Q.H., Zhang, N.Y., and Chua, T.-S., 2012.
Camera constraint-free view-based 3-D object retrieval, IEEE Transactions on Image Processing, 21(4): 2269-2281.
Gao, Y., Wang, M., Zha, Z.-J., Tian, Q., Dai, Q.-H., and Zhang, N.-Y., 2011. Less is more: Efficient 3-D object retrieval with query view selection, IEEE Transactions on Multimedia, 13(5):
1007-1018.
Mademlis, A., Daras, P., Tzovaras, D., and Strintzis, M.G., 2009. Ellipsoidal harmonics for 3-D shape description and retrieval, IEEE Transactions on Multimedia, 11(8): 1422-1433.
Papadakis, P., Pratikakis, I., Perantonis, S., and Theoharis, T., 2007. Efficient 3D shape matching and retrieval using a concrete radialized spherical projection representation, Pattern Recognition, 40(9): 2437-2452.
Stavropoulos, G., Moschonas, P., Moustakas, K., Tzovaras, D., and Strintzis, M.G., 2010. 3-D model search and retrieval from range images using salient features, IEEE Transactions on Multimedia, 12(7), pp. 692-704.
Wilson, J.P., 2012. Digital terrain modeling, Geomorphology, 137: 107-121.
1 Master, Department of Geomatics, National Cheng Kung University Received Date: Feb. 22, 2017
2 Professor, Department of Geomatics, National Cheng Kung University Revised Date: Jan. 22, 2018
* Corresponding Author, E-mail: [email protected] Accepted Date: Feb. 12, 2018
Image-based Airborne LiDAR Point Cloud Encoding for 3D Building Model Retrieval
Yi-Chen Chen 1* Chao-Hung Lin 2
Abstract
With the development of Web 2.0 and cyber city modeling, an increasing number of 3D models have been available on web-based model-sharing platforms with many applications such as navigation, urban planning, and virtual reality. Based on the concept of data reuse, a 3D model retrieval system is proposed to retrieve building models similar to a user-specified query. The basic idea behind this system is to reuse these existing 3D building models instead of reconstruction from point clouds. To efficiently retrieve models, the models in databases are compactly encoded by using a shape descriptor generally. However, most of the geometric descriptors in related works are applied to polygonal models. In this study, the input query of the model retrieval system is a point cloud acquired by Light Detection and Ranging (LiDAR) systems because of the efficient scene scanning and spatial information collection. Using Point clouds with sparse, noisy, and incomplete sampling as input queries is more difficult than that by using 3D models. Because that the building roof is more informative than other parts in the airborne LiDAR point cloud, an image-based approach is proposed to encode both point clouds from input queries and 3D models in databases. The main goal of data encoding is that the models in the database and input point clouds can be consistently encoded. Firstly, top-view depth images of buildings are generated to represent the geometry surface of a building roof. Secondly, geometric features are extracted from depth images based on height, edge and plane of building. Finally, descriptors can be extracted by spatial histograms and used in 3D model retrieval system. For data retrieval, the models are retrieved by matching the encoding coefficients of point clouds and building models. In experiments, a database including about 1,000,000 3D models collected from the Internet is used for evaluation of data retrieval. The results of the proposed method show a clear superiority over related methods.