行政院國家科學委員會專題研究計畫 成果報告
可處理應力與位移限制條件之拓樸最佳化方法
計畫類別: 個別型計畫
計畫編號: NSC93-2212-E-011-035-
執行期間: 93 年 08 月 01 日至 94 年 07 月 31 日 執行單位: 國立臺灣科技大學機械工程系
計畫主持人: 林其禹
計畫參與人員: 林其禹
報告類型: 精簡報告
報告附件: 出席國際會議研究心得報告及發表論文 處理方式: 本計畫可公開查詢
中 華 民 國 94 年 10 月 29 日
可處理應力與位移限制條件之拓樸最佳化方法
A Modified Adaptive Volume Constraint Algorithm for Topology Optimization with Simultaneous Stress and Displacement Constraints
計劃編號:NSC 93-2212-E-011-035- 執行期限:93 年 8 月 01 日 至 94 年 7 月 31 日 主持人:林其禹 國立台灣科技大學機械系教授
1. Abstract
The traditional topology optimization is to minimize compliance of structure with a fixed volume constraint (FVC). The advantage of FVC is that the analytical expressions of sensitivities of the objective function and constraint have been derived.
However, the FVC algorithm fails to handle stress or displacement constraints. The adaptive volume constraint (AVC) algorithm can deal with topology problem subjected to single stress or displacement constraint by iteratively tuning the volume constraint. The modified adaptive volume constraint (AVC2) algorithm proposed in this project is capable of solving topology problem with simultaneous stress and displacement constraints and substantially improving the efficiency of AVC. The AVC2 algorithm has been demonstrated in many enginnering problems with success.
Keyword : topology optimization, adaptive volume constraint algorithm, material distribution method, homogenization method, displacement constraint, stress constraint.
2. Introduction
The optimization serves to optimally
distribute the allowed amount of material in the design space so as to create a structure of the minimum compliance. The main advantage of the topology optimization algorithms with a fixed volume constraint (FVC) is that the analytical expressions of sensitivities of the objective function and volume constraint with respect to the densities of elements have been derived.
Therefore, the prohibitively large computational cost of calculating sensitivities is waived. However, topology optimization with a FVC algorithm is not capable of tackling stress or displacement constraint.
Yang and Chen [1] and Steven et al. [2]
reduced the peak stress of structures by means of different objective functions such as weight, compliance and stress subjected to a fixed volume constraint. But the minimum-compliance structure thus obtained can either become excessively strong or fail to meet the practical stress and displacement constraints.
Baumgartner et al. [3] provided SKO technique and Steven and Xie [4] used ESO to deal with the structural optimization problems with stress criteria. Many ESO-related research works aimed to maximize various performance indexes of a structure subject to different constraints by gradually eliminating elements of the lowest
1
strain energy values. But the efficiency of finding the optimal design is not stable since it is easily affected by the selection of the element elimination ratios and the elimination strategies.
Lin and Hsu [5, 6] proposed the adaptive volume constraint (AVC) algorithms to deal with the topology optimization problems with a single constraint, the maximum stress and the displacement limit, respectively. The AVC algorithm solves the compliance minimization problems except that the fixed volume constraint is replaced by the adaptive volume constraint in topology optimization. The automatic adjustment strategy on the AVC can lead to the minimum compliance design that also meets the allowable stress or the displacement limit. However, the AVC is applied to topology optimization problem with only a single constraint and the efficiency of AVC is not on line to that of FVC.
The modified adaptive volume constraint (AVC2) algorithm is proposed in this research in order to improve the main drawbacks of the AVC algorithm by means of the different change strategies on move limits in the sequential linear programming (SLP). The AVC2 algorithm can substantially improve the efficiency of the AVC algorithm and works successfully in 3-D structural optimization problems.
3. Modified adaptive volume constraint algorithm and post-topology
optimization treatments
The purpose of the modified adaptive
volume constraint algorithm (AVC2) is to improve the drawbacks of the AVC algorithm, which evolved from the FVC algorithm. The AVC2 aims to simultaneously search for both a suitable volume usage and a minimum-compliance structure that simultaneously meets the stress and displacement constraints. The optimization continually searches for the suitable volume usage constraint according to the displacement and stress status of the current structures while the optimization seeks the best material distribution on the design domain with the newest volume usage constraint. The systematic flowchart of the execution of the topology optimization with the modified adaptive volume constraint algorithm is shown in Figure 1.
The AVC algorithm was provided to solve topology optimization problem with a single constraint, stress or displacement.
However, the AVC2 algorithm is to solve topology optimization problem with multiple constraints, simultaneously stress and displacement.
The second difference between AVC2 and AVC is the change of move limit of SLP.
In the AVC algorithm, the move limit will be decrease gradually when the design is almost active or convergent. And when the new volume constraint is updated, the move limit continues decreasing. It will affect the efficiency of AVC. Therefore, the AVC2 algorithm is to restore the move limit to original value as the volume constraint is updated.
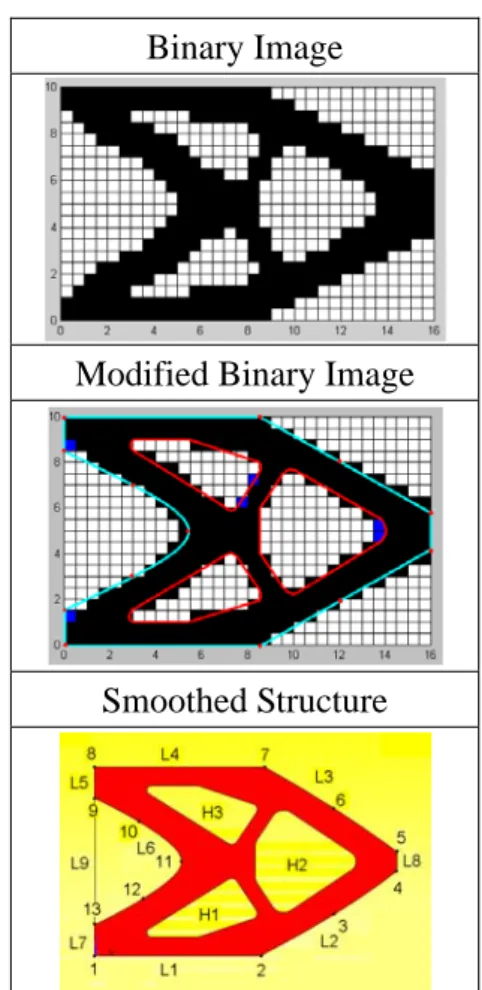
At the first stage of the integrated topology optimization field, FVC, AVC or AVC2 algorithms in topology optimization
will attain a gray level image. The second stage is to attain the binary image according to the gray level image as seen in Figure 2.
First, the binary structure is created by the
“penalty technique” and “threshold and image processing techniques.” Then, a structural with smooth boundaries will be obtained by defining the exterior boundary and the interior hole of smoothed structure.
Finally, the formal structure with detailed shape description can be attained through the use of the shape optimization algorithm with proper definitions on shape-defining design variables.
To further illustrate the advantages of the proposed AVC2 algorithm, all smoothed structures resulted from different topology optimization algorithms, FVC, AVC and AVC2, are used to formulate the subsequent shape optimization problems. The material usage ratio of the structure is used as the objective function of the shape optimization problem and the maximum stress and displacement limits are imposed. The modified feasible directions algorithm (Vanderplaats 1984) [7] is used to tackle the shape optimization problems. These experiments consistently demonstrate that the improved efficiency and reliability of the AVC2 algorithm over the AVC algorithm.
4. Conclusions
The AVC2 algorithm significantly extends the capabilities of the traditional topology optimization methods to problems involving stress and displacement constraints without the need of the sensitivities of the constraints. The AVC2 algorithm consistently produces feasible
minimum-compliance structural configurations in different design problems
with stress and displacement constraints.
The efficiency of AVC2 algorithm is improved in this study and much more efficient than the AVC algorithm. The number of iteration of analysis required to perform the density-based topology optimization with the AVC2 algorithm is greater. The number of structural analysis required in the shape optimization based on the structural model resulted from the AVC2 algorithm is better than those based on the FVC algorithms in most situations.
In this study, the reduction of the computational cost of the AVC2 algorithm in the topology optimization process is successful. The AVC2 is a simple algorithm, capable of producing a good quality structure meeting constraints. It can be also applied to some other constraints easily and not to change the algorithm virtually.
References
[1] R.J. Yang and C.J. Chen, Stress-Based Topology Optimization, Structural Optimization, 12 (1996) 98-105.
[2] G.P. Steven, Y.M. Xie and Q. Li, Multi-criteria Optimization that Minimizes Maximum Stress and Maximizes Stiffness, Computers and Structures, 80 (2002) 2433-2448.
[3] A. Baumgartner, L. Harzheim and C. Mattheck, SKO: the Biological Way to Find Optimum Structure Topology, International Journal of Fatigue, 14 (1992) 387-393.
[4] G.P. Steven and Y.M. Xie, A Simple
3 Evolutionary Procedure for Structural Optimization, Computers and Structures, 49 (1993) 885-896.
[5] C.Y. Lin and F.M. Hsu, Adaptive Volume Constraint Algorithm for Stress-Limit Based Topology Optimization, submitted to Computer Methods in Applied Mechanics and Engineering, (2004).
[6] C.Y. Lin and F.M. Hsu, Adaptive Volume Constraint Algorithm for Topology Optimization with Displacement-Limit, submitted to Structural and Multidisciplinary Optimization, (2004).
[7] G.N. Vanderplaats, Numerical Optimization Techniques for Engineering Design, McGraw-Hill, (1984).
Conduct one iteration of optimization
Both criteria A-1 and A-2
met ?
Any of criteria B-1, B-2, B-3 and
B-4 met ?
Criterion D met ? Conduct one iteration of optimization with the old
volume constraint Any of criteria C-1, C-2 and C-3
met ?
Stop Adjust volume
constraint (Max.= 5%)
Topology optimization problem definition
Adjust volume constraint (Max.= 2%)
Yes
Yes
Yes
Yes
No No
No
No Restore original value of move limit
Figure 1: Flowchart of adaptive volume constraint algorithm
Binary Image
Modified Binary Image
Smoothed Structure
Figure 2: Binary image, modified binary image and smoothed structure