Elsevier Editorial System(tm) for International Journal of Information Management Manuscript Draft
Manuscript Number:
Title: Mobile Charging Information Management for Smart Grid Networks Article Type: Research Paper
Keywords: smart grid network; mobile charging station; electric vehicle; mobile charging information management system
Corresponding Author: Mr. Shun-Neng Yang, M.Eng.
Corresponding Author's Institution: Industrial Technology Research Institute (ITRI) First Author: Shun-Neng Yang, M.Eng.
Order of Authors: Shun-Neng Yang, M.Eng.; Hsiao-Wei Wang, B.Eng.; Chai-Hien Gan, Ph.D.; Yi-Bing Lin, Ph.D.
Abstract: With today's electric charging technology, charging time of an electric vehicle (EV) is much longer than that for a gasoline vehicle, and therefore the queueing effect at an EV charging station (CS) may be serious. That is, when an EV arrives at an overloaded CS, it is likely that the EV will wait for a long time before it is charged. This paper investigates the waiting problem for EV charging. We propose a Mobile CS (MCS) management system to dynamically distribute charging pole support that reduces the waiting times of EVs incurred in a fixed CS. A Mobile Charging Information Management System (MC-IMS) is presented to describe the execution flow of the MCS service. Simulation
experiments are conducted to investigate the waiting time performance for the proposed mechanism.
Our study indicates that the MCS-based MC-IMS provides effective EV charging with short waiting times.
Dear Editor,
We would like to submit the manuscript entitled "Mobile Charging Information Management for Smart Grid Networks" for the IJIM special section invitation from Prof. Ilsun You, and we wish to be considered for publication in International Journal of Information Management.
This paper investigates the waiting problem for EV charging. We propose a Mobile Charging Station (MCS) management system to dynamically distribute charging pole support that reduces the waiting times of EVs incurred in a fixed charging station. A Mobile Charging Information Management System (MC-IMS) is presented to describe the execution flow of the MCS service. Simulation experiments are conducted to investigate the waiting time performance for the proposed mechanism.
Our study indicates that the MCS-based MC-IMS provides effective EV charging with short waiting times.
All authors (Shun-Neng Yang; Hsiao-Wei Wang; Chai-Hien Gan, Ph.D.; Yi-Bing Lin, Ph.D) have seen the manuscript and approved to submit to International Journal of Information Management.
Thank you very much for your attention and consideration.
Yours faithfully,
===================================================
Shun-Neng Yang (Corresponding Author) Industrial Technology Research Institute (ITRI) Tel: +886-3-591-2286
Fax: +886-3-582-0263 E-mail: [email protected]
===================================================
Cover Letter
Highlights
We propose two types of smart grid networks for an Electric Vehicle (EV) charging: the Fixed Charging Station (FCS) and the Mobile Charging Station (MCS) networks.
We propose a Mobile Charging Information Management System (MC-IMS) to distribute charging poles to the FCSs to reduce the waiting times of EVs incurred in these FCSs.
We investigate the waiting time performance through simulation experiments which indicate that through the dispatching of the MC-IMS, the MCS network has better performance than the FCS network.
*Highlights (for review)
1
Mobile Charging Information Management for Smart Grid Networks
Shun-Neng Yang1,2,*, Hsiao-Wei Wang2, Chai-Hien Gan1, and Yi-Bing Lin2
1Information and Communications Research Laboratories
ITRI
2Department of Computer Science
National Chiao Tung University
Chutung, Hsinchu, 31040, Taiwan, R.O.C Hsinchu, 30010, Taiwan, R.O.C
{takeshi, chgan}@itri.org.tw {snyang, hwwang, liny}@cs.nctu.edu.tw
Abstract
With today’s electric charging technology, charging time of an electric vehicle
(EV) is much longer than that for a gasoline vehicle, and therefore the queueing effect at an EV charging station (CS) may be serious. That is, when an EV arrives at an overloaded CS, it is likely that the EV will wait for a long time before it is charged.
This paper investigates the waiting problem for EV charging. We propose a Mobile CS (MCS) management system to dynamically distribute charging pole support that reduces the waiting times of EVs incurred in a fixed CS. A Mobile Charging Information Management System (MC-IMS) is presented to describe the execution flow of the MCS service. Simulation experiments are conducted to investigate the
*Corresponding author.
E-mail: [email protected] (Shun-Neng Yang), Tel: +886-3-591-2286, Fax: +886-3-582-0263
*Manuscript
Click here to view linked References
waiting time performance for the proposed mechanism. Our study indicates that the MCS-based MC-IMS provides effective EV charging with short waiting times.
Keywords: smart grid network; mobile charging station; electric vehicle; mobile charging information management system
1. Introduction
Compared with gasoline cars, Electric Vehicles (EVs) provide energy-efficient transport with carbon emission reduction (Kim, 2003; Lee, 2007; Schofield et al., 2005; U.S. Fuel Economy, 2011). An important issue about EV charging is to deploy an efficient smart grid network that can effectively and conveniently charge the EVs.
This Grid-to-Vehicle (G2V) issue has been intensively investigated in the literature (Verma et al., 2011). Other EV charging/discharging issues for G2V-based smart grid network have been also studied, including Vehicle-to-Grid (V2G) and Vehicle-to-Vehicle (V2V) scenarios. An EV is generally equipped with energy storage of 24–56 kWh (Nissan USA, 2012; Tesla Motors, 2011), which is about 2–5 times more than the average daily energy consumption of a household in Taiwan (Miao, 2008). V2G technology utilizes such high energy storage of EV to discharge
electricity to the power grid (Su et al., 2008). In the V2V technology, an EV can soak up the power from the battery of a specific EV that is equipped with plenty energy storage (Li et al., 2010; Sahinoglu et al., 2010). The V2G and V2V technologies are currently under feasibility study and trial operations (Baker, 2011; Li et al., 2010;
NUVVE Corporation, 2012; Sahinoglu et al., 2010; Su et al., 2008). This paper focuses on G2V architecture that also accommodates the V2V technology.
In a smart grid network, several Fixed Charging Stations (FCSs) are deployed in geographic area such as a highway. The charging time of an EV typically exceeds 30 minutes with the present fast-charging technologies (Nor, 1993; Winkler et al., 2009).
If an EV arrives at an overloaded FCS, it will wait for a long time before it is charged.
This paper integrates G2V and V2V technologies to reduce the EV waiting time for charging. The idea is to deploy Mobile Charging Stations (MCSs) in the smart grid network, which are dynamically distributed to relieve the workload of busy FCSs. An MCS is a specific EV equipped with several fast Charging Poles (CPs). When too many EVs arrive at an FCS (specifically the number of EVs in the FCS exceeds a tolerable threshold), an MCS will be dispatched to support the FCS for relieving the charging workload. The power source of an MCS may come from the connection to the power grid at the FCS or the MCS can be equipped with limited energy storage.
This paper studies the scenario of the former case. In the latter case, the MCS needs
to be recharged from time to time.
Information Management System (IMS) has been utilized to support many large-scale scheduling and parallel processing applications such as aviation (Abdi &
Sharma, 2007) and cryptography (Ogiela & Ogiela, 2012). In this paper, we take the advantage of the IMS approach for dispatching the MCSs. Specifically, we develop a Mobile Charging Information Management System (MC-IMS) that dynamically dispatches the MCSs to relieve the workload of FCSs. In this solution, an EV is connected to an FCS for G2V charging, and is connected to an MCS for V2V charging. Our approach distributes MCSs based on the workload information (i.e., the number of EVs in the FCS) of FCSs. We conduct simulation experiments to compare the performance between traditional FCS system and the MC-IMS in terms of the average waiting time of EVs. In this paper, the smart gird network is called an FCS network if it is only deployed with FCSs (and the network only supports G2V charging). On the other hand, if MCSs are also deployed besides FCSs to be dispatched by the MC-IMS, then the smart grid network is called an MCS network (where both G2V and V2V charging are supported).
2. MC-IMS-based Smart Grid Network
This section describes the waiting problem of EVs at FCSs. Then we describe how the MC-IMS dispatches MCSs based on the workload information of FCSs.
B to D A to C
(1) MC-IMS
40 km 80 km 120 km 160 km 200 km 240 km
FCS1 FCS2 FCS3 FCS4 FCS5 FCS6
0 km 520 km
A D
FCS7 FCS8 FCS9 FCS10 FCS11 FCS12 280 km 320 km 360 km 400 km 440 km 480 km
B 180 km
C 340 km MCS1
(2) FCSs on highway
EVs on highway
MCS2
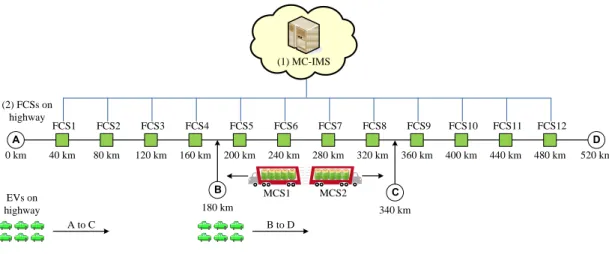
Figure 1: The MC-IMS-based MCS Network Architecture
Without loss of generality, we consider the Taiwan-highway-like model (Taiwan Area National Freeway Bureau of MOTC, 2012) to show the MC-IMS architecture.
As illustrated in Figure 1, the length of the highway is 520 km with 12 intermediate highway rest areas. We assume that the FCSs are located at the highway rest areas (one FCS per rest area). The distance between two FCSs is 40 km.
In a smart grid network, an EV is installed an on-board unit (OBU, a GPS-based navigator). Therefore, from a digital map and GPS, the EV is aware of the locations of the FCSs. In an FCS network, when an EV travels on the highway, its OBU can select the next FCS for charging based on the local information (i.e., the current position of the EV, the remaining electricity, and the distances to the FCSs) (Imai et al., 2008). From the local information, the OBU compiles a list of reachable FCSs,
and then selects the next FCS for charging. We assume that each EV selects the farthest FCS for charging.
Since each EV selects the next FCS without considering the queueing status of FCS, the EVs may select busy FCSs. To resolve this issue, the MCSs are introduced into the FCS network and are dispatched by the MC-IMS (see Figure 1 (1)) to support hot-spot FCS locations. An FCS (e.g., Figure 1 (2)) requests MCS support from the MC-IMS when the number of EVs in this FCSis larger than a high threshold. Then the MC-IMS will dispatch an MCS to provide extra charging capacity to the FCS location. On the other hand, if the workload of an FCS with MCSs is under a low threshold, then the MCSs at this FCS location can be dispatched to support other hot spots.
The parameters used in this mechanism are described as follows. Suppose that there are F FCSs, and each FCS has Pf CPs. There are M MCSs, each of them has Pm CPs. The ith FCS is denoted as f(i), where 1≤i≤F. In f(i), several parameters are
maintained:
q : the queue length (the workload) or the number of EVs in the FCS
f : a flag indicating the status of the workload, where f=0 represents the
light-load, f=1 represents the medium-load, and f=2 represents the heavy-load
Pn : the number of CPs at an FCS’s location, where f(i).Pn=Pf+jPm means
that there are j MCSs at f(i)’s location
To determine whether an FCS will request an MCS or donate an MCS, the
criterion with a weighted factor > 1 is considered to indicate the workload of an FCS. An FCS is heavy-load if f(i).q≥f(i).Pn. On the other hand, the FCS is light-load
if f(i).Pn-f(i).q≥Pm. A light-load FCS can donate MCSs if f(i).Pn>Pf (i.e., there is at least one MCS at this FCS location). The parameters maintained in the MC-IMS
include:
QD : the donor list or the set of light-load FCSs that can donate one or more
MCSs
QR : the requester list or the set of heavy-load FCSs that require extra CPs
Based on the above parameters, we develop the procedures for the MCS-Dispatching mechanism to be described in the next section.
3. The Procedures for the MCS-Dispatching Mechanism
The procedures for the MCS-Dispatching mechanism include EV-Arrival, Request-MCS, Dispatch-MCS, Donate-MCS, Cancel-Donate-MCS,
Charge-Complete, Cancel-Request-MCS, and MCS-Arrival. The details are
elaborated in the subsequent subsections.
3.1. EV-Arrival Procedure
A.3. Else if
f(i).Pn-f(i).q<Pm
and f(i).f=0 A.3.2. If f(i).Pn>Pf
A.2. If
f(i).q≥αf(i).Pn
and f(i).f=1
A.1. f(i).q is set to f(i).q+1
A.2.2. Invoke the Request-MCS procedure
A.3.1. f(i).f is set to 1
Invoke the Cancel-Donate-MCS procedure A.2.1. f(i).f is set to 2
f(i) MC-IMS f(k)
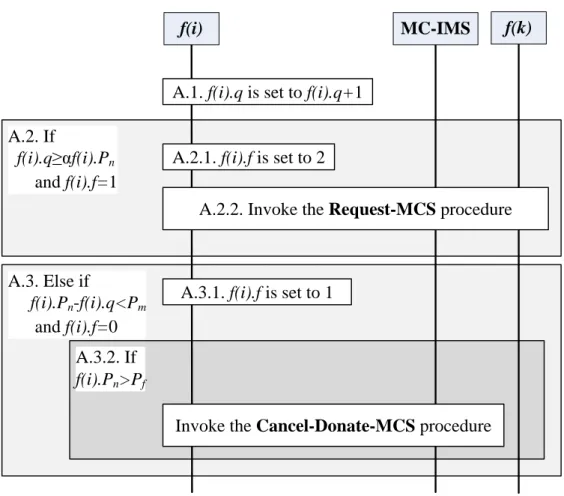
Figure 2: The message flow of the EV-Arrival procedure
When an EV arrives at f(i) for charging, the EV-Arrival procedure is executed.
The message flow is shown in Figure 2 and is described as follows:
Step A.1. An EV arrives at f(i), and f(i).q is incremented by 1.
Step A.2. (Check if the workload of f(i) changes from medium to heavy). If f(i).q≥f(i).Pn and f(i).f=1, then f(i) requests extra CPs from the MC-IMS with
the following actions:
Step A.2.1. f(i).f is set to 2.
Step A.2.2. f(i) invokes the Request-MCS procedure (see Section 3.2) and
exits.
Step A.3. (Check if the workload of f(i) changes from light to medium). Else
if f(i).Pn-f(i).q<Pm and f(i).f=0, then the following substeps are executed:
Step A.3.1. f(i).f is set to 1.
Step A.3.2. If f(i).Pn>Pf (i.e., there are one or more MCSs at f(i)’s location), then f(i) invokes the Cancel-Donate-MCS procedure (see Section 3.5) and exits.
Note that if f(i).q≤f(i).Pn after Step A.1 is executed, then the EV is served by a CP immediately. Otherwise, the EV is queued in f(i). When the workload of f(i) changes from light to medium, if f(i).Pn=Pf at Step A.3, there is no MCS at f(i)’s location, and f(i) does not donate any MCS to the MC-IMS.
If neither Step A.2 nor Step A.3 is executed, it means that the workload of f(i) does not change when the EV arrives, and f(i) needs not to interact with the MC-IMS.
3.2. Request-MCS Procedure
B.4. Else if QD ≠Φ
B.4.5. Else if c < 0 B.3. If QD =Φ
B.4.3. If c ≤ 0
B.4.4. If c ≥ 0
B.4. Select k from QD
B.1. Request-MCS
Request-MCS-Response (Accept)
B.2. Check the status of QD
QD is set to QD–{k}
B.3.2. Request-MCS-Response (Reject)
Go to Step B.3 B.3.1. QR is set to QR ∪{i}
B.4.1. Invoke the Dispatch-MCS procedure B.4.2. Check the returned result c
f(i) MC-IMS f(k)
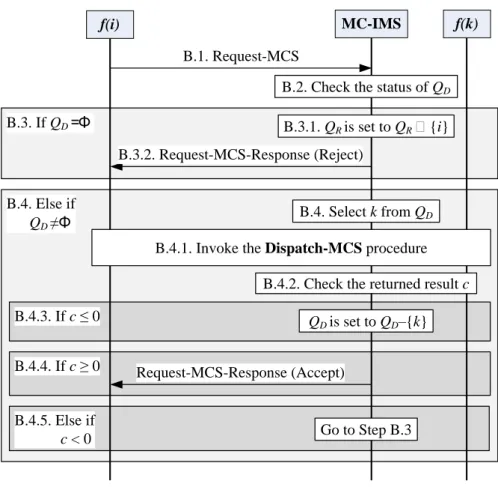
Figure 3: The message flow of the Request-MCS procedure
In the Request-MCS procedure, f(i) requests the MC-IMS to provide MCS support. The MC-IMS selects a light-load FCS from QD to donate extra MCSs. The message flow is shown in Figure 3 and is described as follows:
Step B.1. f(i) sends the Request-MCS message to the MC-IMS for MCS support.
Step B.2. Upon receipt of the Request-MCS message, the MC-IMS checks the
status of QD.
Step B.3. If QD=Φ (i.e., no FCS can donate any MCS to f(i)), then the MC-IMS takes the following actions:
Step B.3.1. QR is set to QR ∪{i}.
Step B.3.2. The MC-IMS sends the Request-MCS-Response message with
the result “Reject” to f(i), and this procedure exits.
Step B.4. Else (i.e., QD ≠Φ and there is at least an FCS that can donate an MCS) the MC-IMS selects k in QD such that the distance of f(k) is closest to f(i).
Step B.4.1. The MC-IMS invokes the Dispatch-MCS procedure (see
Section 3.3) that instructs f(k) to send an MCS to f(i).
Step B.4.2. Check the returned result c of the Dispatch-MCS procedure
(c≥0 represents the number of MCSs remained at f(k)’s location after dispatching an MCS to f(i), and c<0 represents that no free MCS is at f(k)’s location).
Step B.4.3. If c≤0 (i.e., f(k) has medium or heavy workload), then QD is set to QD–{k}.
Step B.4.4. If c≥0 (i.e., an MCS has been dispatched to support f(i)), then
the MC-IMS sends the Request-MCS-Response message with the result
“Accept” to f(i).
Step B.4.5. Else (i.e., the MC-IMS should select another FCS from QD to support f(i)) go to Step B.3.
Note that although QD indicates that an FCS f(k) can donate an MCS at Step B.4, f(k) may cancel its donation before Step B.4.1 is completed. If so, the MC-IMS must
check QD to find another MCS donor. Therefore, Step B.4.5 may loop back to Step B.3. At Step B.4.3 and B.4.4, when c=0, it means that f(k) becomes medium-load
after it has dispatched an MCS.
3.3. Dispatch-MCS Procedure
C.3. If
≥ 1
C.1. Request-MCS
C.4. Request-MCS-Response Dispatch an MCS to f(i) C.2. Check f(k)’s workload
m
f n
P
P q k f P k
f( ). max( ( ). , )
MC-IMS f(k)
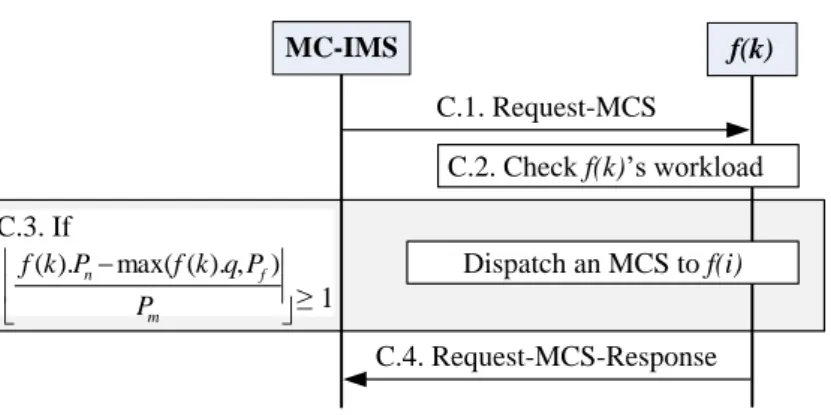
Figure 4: The message flow of the Dispatch-MCS procedure
In the Dispatch-MCS procedure, the MC-IMS dispatches an MCS from f(k) to f(i). In this procedure, we can use the switching technique to switch the EVs charged by the CPs of certain MCSs to the CPs of the FCS or other MCSs, and
is the number of MCSs that f(k) can donate (if
≥1). The message flow is shown in Figure 4 and is
described as follows:
Step C.1. The MC-IMS sends the Request-MCS message to f(k). This message
requests f(k) to dispatch an MCS to support f(i).
Step C.2. Upon receipt of the Request-MCS message, f(k) checks its workload.
Step C.3. If ≥1 (i.e., f(k) can donate at least one MCS), then f(k) dispatches an MCS to f(i) and f(k).Pn is set to f(k).Pn-Pm.
Step C.4. f(k) sends the Request-MCS-Response message with the status code
c= to the MC-IMS.
At Step C.3, f(k).Pn is decreased by the amount Pm. Therefore, at Step C.4, c<0 represents that no free MCS is at f(k)’s location, c=0 represents that exactly one free MCS is at f(k)’s location, c>0 represents that more than one free MCSs are at f(k)’s location, and f(k) has dispatched an MCS for c≥0.
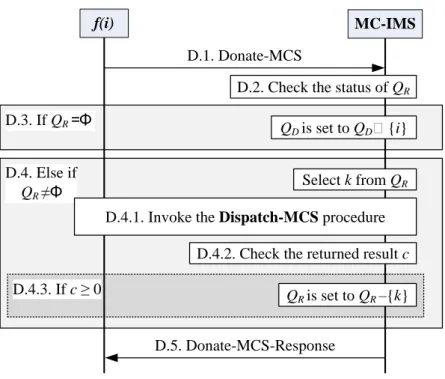
3.4. Donate-MCS Procedure
D.4. Else if QR ≠Φ
D.4.3. If c ≥ 0
D.3. If QR =Φ QD is set to QD∪{i}
Select k from QR
QR is set to QR –{k}
D.1. Donate-MCS
D.2. Check the status of QR
D.5. Donate-MCS-Response D.4.1. Invoke the Dispatch-MCS procedure
D.4.2. Check the returned result c
f(i) MC-IMS
Figure 5: The message flow of the Donate-MCS procedure
In the Donate-MCS procedure, f(i) informs the MC-IMS that f(i) can donate MCSs. The message flow is shown in Figure 5 and is described as follows:
Step D.1. f(i) sends the Donate-MCS message to the MC-IMS.
Step D.2. Upon receipt of the Donate-MCS message, the MC-IMS checks the
status of QR.
Step D.3. If QR=Φ (i.e., no FCS needs extra CPs), then QD is set to QD∪{i}.
Step D.4. Else (i.e., QR≠Φ and there is an FCS that needs extra CPs) the MC-IMS selects k from QR.
Step D.4.1. The MC-IMS invokes the Dispatch-MCS procedure (see Section
3.3) that instructs f(i) to send an MCS to f(k).
Step D.4.2. The Dispatch-MCS procedure returns the result c to the
MC-IMS.
Step D.4.3. If c≥0 (i.e., f(i) has dispatched an MCS to support f(k)), then the
MC-IMS sets QR to QR –{k}.
Step D.5. The MC-IMS sends the Donate-MCS-Response message to f(i).
After Step D.4.2, if c<0 (i.e., f(i) cannot donate any MCS to support f(k)), the MC-IMS takes no action.
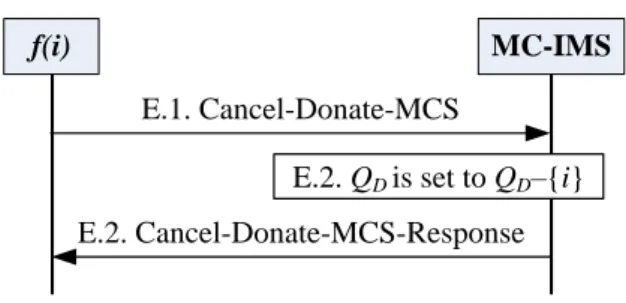
3.5. Cancel-Donate-MCS Procedure
E.1. Cancel-Donate-MCS
E.2. QD is set to QD–{i}
E.2. Cancel-Donate-MCS-Response
f(i) MC-IMS
Figure 6: The message flow of the Cancel-Donate-MCS procedure
In the Cancel-Donate-MCS procedure, f(i) informs the MC-IMS to cancel the previous donation. When this procedure is executed, it means that after the FCS decided to donate an MCS, its workload has been increased, and the FCS can no
longer keep its promise (and therefore has to cancel the donation). The message flow is shown in Figure 6 and is described as follows:
Step E.1. f(i) sends the Cancel-Donate-MCS message to inform the MC-IMS
that f(i) will not release any MCS.
Step E.2. Upon receipt of the Cancel-Donate-MCS message, the MC-IMS sets
QD to QD–{i} and sends the Cancel-Donate-MCS-Response message to inform f(i) that the donation is cancelled.
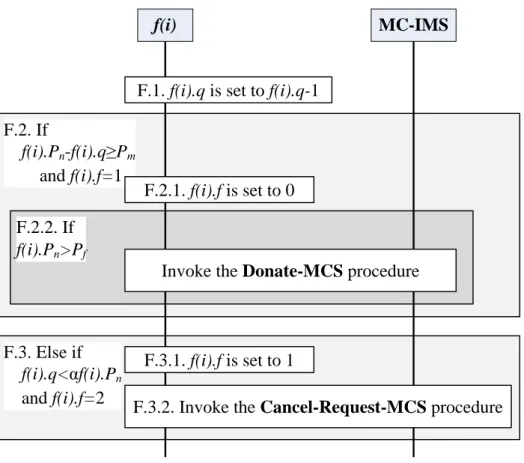
3.6. Charge-Complete Procedure
F.2. If
f(i).Pn-f(i).q≥Pm
and f(i).f=1
F.2.2. If f(i).Pn>Pf
F.3. Else if f(i).q<αf(i).Pn
and f(i).f=2
Invoke the Donate-MCS procedure
F.3.2. Invoke the Cancel-Request-MCS procedure F.2.1. f(i).f is set to 0
F.3.1. f(i).f is set to 1 F.1. f(i).q is set to f(i).q-1
f(i) MC-IMS
Figure 7: The message flow of the Charge-Complete procedure
When an EV completes its charging from f(i), the Charge-Complete procedure is executed. The message flow is shown in Figure 7 and is described as follows:
Step F.1. An EV completes its charging from f(i), and f(i).q is decremented by 1.
Step F.2. (Check if the workload of f(i) changes from medium to light). If
f(i).Pn-f(i).q≥Pm and f(i).f=1, then the following substeps are executed:
Step F.2.1. f(i).f is set to 0.
Step F.2.2. If f(i).Pn>Pf (i.e., there are one or more free MCSs at f(i)’s location), then f(i) invokes the Donate-MCS procedure (see Section 3.4) and exits.
Step F.3. (Check if the workload of f(i) changes from heavy to medium).
Else if f(i).q<f(i).Pn and f(i).f=2, then f(i) informs the MC-IMS that it no
longer requests for MCS support with the following actions:
Step F.3.1. f(i).f is set to 1.
Step F.3.2. f(i) invokes the Cancel-Request-MCS procedure (see Section
3.7) and exits.
Note that when the workload of f(i) changes from medium to light, if f(i).Pn=Pf
at Step F.2, there is no MCS at f(i)’s location, and f(i) needs not to interact with the MC-IMS.
If neither Step F.2 nor Step F.3 is executed, it means that the workload of f(i) does not change. In this case, f(i) needs not to interact with the MC-IMS.
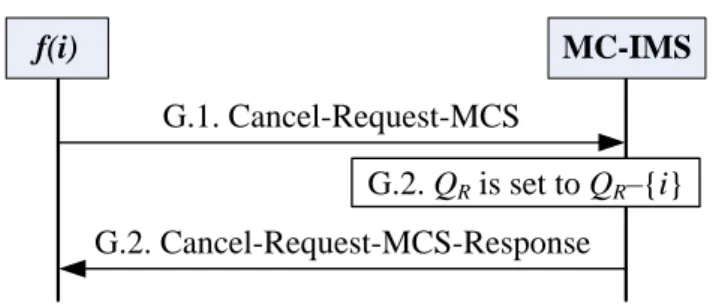
3.7. Cancel-Request-MCS Procedure
G.1. Cancel-Request-MCS
G.2. QR is set to QR–{i}
G.2. Cancel-Request-MCS-Response
f(i) MC-IMS
Figure 8: The message flow of the Cancel-Request-MCS procedure
In the Cancel-Request-MCS procedure, f(i) informs the MC-IMS to cancel the previous Request-MCS command sent from f(i). When this procedure is executed, it means that after the FCS decided to request an MCS, its workload has been decreased, and the FCS no longer requests for MCS support (and therefore has to cancel the previous request). The message flow is shown in Figure 8 and is described as follows:
Step G.1. f(i) sends the Cancel-Request-MCS message to inform the MC-IMS
that f(i) will not request extra MCSs.
Step G.2. Upon receipt of the Cancel-Request-MCS message, the MC-IMS sets
QR to QR–{i} and sends the Cancel-Request-MCS-Response message to inform f(i) that the request is successfully cancelled.
3.8. MCS-Arrival Procedure
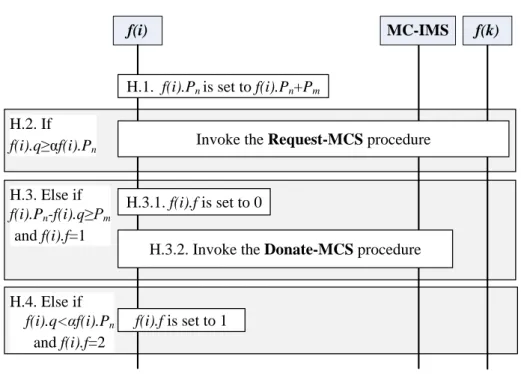
H.4. Else if f(i).q<αf(i).Pn
and f(i).f=2 H.2. If f(i).q≥αf(i).Pn
H.3. Else if f(i).Pn-f(i).q≥Pm
and f(i).f=1
f(i)
H.1. f(i).Pn is set to f(i).Pn+Pm
Invoke the Request-MCS procedure
H.3.2. Invoke the Donate-MCS procedure
f(k)
H.3.1. f(i).f is set to 0
MC-IMS
f(i).f is set to 1
Figure 9: The message flow of the MCS-Arrival procedure
When an MCS arrives at f(i) to provide extra CPs, the MCS-Arrival procedure is executed. The message flow is shown in Figure 9 and is described as follows:
Step H.1. An MCS arrives at f(i) to provide extra CPs. f(i).Pn is set to f(i).Pn+Pm.
Step H.2. (Check if the workload of f(i) is still heavy). If f(i).q≥f(i).Pn, then
f(i) invokes the Request-MCS procedure (see Section 3.2) and exits.
Step H.3. (Check if the workload of f(i) changes from medium to light). Else
if f(i).Pn-f(i).q≥Pm and f(i).f=1, then f(i) can donate MCSs with the following
actions:
Step H.3.1. f(i).f is set to 0.
Step H.3.2. f(i) invokes the Donate-MCS procedure (see Section 3.4) and
exits.
Step H.4. (Check if the workload of f(i) changes from heavy to medium) Else
if f(i).q<f(i).Pn and f(i).f=2, then f(i).f is set to 1.
If neither Step H.2 nor Step H.3 is executed, it means that the workload of f(i) is medium or is still light. In this case, f(i) needs not to interact with the MC-IMS.
4. Performance Evaluation
We develop an event-driven simulation model (Gan & Lin, 2007) to compute the output measures for the FCS and the MCS networks. Based on the simulation experiments, this section compares the performance of these two networks. In our simulation experiments, the speed of an EV is uniformly distributed between 60 km/hr and 100 km/hr, which are the lower and the upper speed limits of TNE1, respectively. The initial power of an EV is uniformly distributed between 25% and 100% (the value 25% is the minimal required power for an EV to drive to the nearest FCS). A fully-charged EV can last for 160 km (e.g., when an EV travels for a trip longer than 160 km in the highway, it must be recharged at the FCSs), and the time
for an EV charging from 0% to 100% is 30 minutes. Each EV is charged to 100% at an FCS, and the charging time is linearly proportional to the amount of charged
energy. We simulate 1,000,000 EV arrivals. For the FCS workload indication, the weighted factor is set to 1.5.
The input parameters in the simulation experiments are the EV arrival rate (λ), the number of FCSs (F), the number of CPs at each FCS (Pf), the number of MCSs (M), and the number of CPs on each MCS (Pm).
The major output measure in this paper is the average waiting time W for an EV before it is charged at an FCS location.
Without loss of generality, there are two types of EV traffic patterns: In the first pattern, the EVs drive from point A to point C as illustrated in Figure 1. In the second pattern, the EVs drive from point B to point D. The length of each path is 340 km.
Note that the paths (A, C) and (B, D) have an overlapping segment (B, C) that covers four FCSs (i.e., from FCS5 to FCS8). The EVs arrivals are a Poisson process with the rate λ ranging from 1.02 to 1.06, which is about 8.5% to 8.8% of the average vehicle traffic of Sijhih at Taiwan National Expressway 1 (TNE1) in southward direction (i.e., for every minute, there are 12 car arrivals, and among them, 1.02 to 1.06 are EVs) (Ministry of Transportation and Communications, 2011). Each EV selects the farthest FCS for charging. When an EV enters an FCS and then is served by a CP, we collect
its waiting time at the FCS location (i.e., the time that the EV waits for charging).
We assume that there are 12 FCSs, and each FCS has 20 CPs in the FCS network (i.e., the total number of CPs is 240). There are M MCSs and each MCS is equipped with Pm CPs. The speed of an MCS is set to 90 km/hr, which is the upper speed limit of large truck on TNE1. To make a fair comparison, the total number of
CPs in the MCS network is also set to 240 in the following simulations (i.e., FPf+MPm=240, where F is fixed to 12).
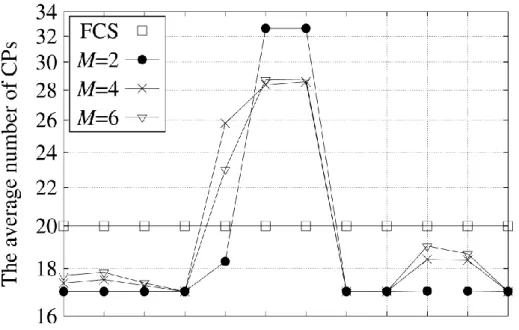
Figure 10: The CP distribution among the FCS locations (λ=1.04; FCS network:
F=12, Pf=20, M=Pm=0; MCS network: F=12, Pf=17, MPm=36)
Figure 10 compares the CP distribution between the FCS network and the MCS network. Note that in the FCS network, every FCS has 20 CPs (see the □ line). In the MCS network, we allocate 15% of total CPs to 2, 4, and 6 MCSs respectively (i.e., each MCS has 18, 9, and 6 CPs, respectively) and the arrival rate λ is fixed to 1.04.
Since the overlapping segment (B, C) covers FCS5 to FCS8, it is more likely that the hot spots occur in these four FCSs. Figure 10 shows that FCS5 to FCS7 receive more extra CPs that will mitigate workloads of the hot spots. The MCS network can distribute CPs flexibly since the mobile CPs can be donated to the hot-spot FCSs and effectively reduces the queueing effect in these FCSs.
Figure 11: The W performance (FCS network: F=12, Pf=20, M=Pm=0; MCS network:
F=12, Pf=17, MPm=36)
Figure 11 compares the average waiting time W between the FCS network and the MCS network, where the total number of CPs is fixed to 240. In this simulation experiment, the EV arrival rate λ ranges between 1.02 and 1.06. We allocate 15% of total CPs to 2, 4, and 6 MCSs, respectively. Intuitively, W increases as λ increases. In
the FCS network, if λ is small, W increases slowly as λ increases. When λ>1.05, W increases fast as λ increases since the queueing effects of the hot spots are intensified
with the high EV arrival rates. On the other hand, the MCS network can effectively distribute the CPs to the hot spots (i.e., FCS5 to FCS7) to reduce the queueing effect of these FCSs (see Figure 10). Therefore, the W values in the MCS network increase insignificantly for all λ values, and are much lower than those in the FCS network.
The advantage of the MCS network over the FCS network becomes very significant when traffic load is heavy.
Let WF be the W for the FCS network, and WM be the W for the MCS network.
Then the improvement of W by the MCS network over the FCS network can be defined as:
F M F
W W
I W
(1)
(a) Effect of the percentage of CPs carried by the MCSs (b) Effect of the number of MCSs
Figure 12: The improvement I where 5% to 20% CPs are mobile (λ=1.04;
FPf+MPm=240, e.g., in the 5% case, F=12, Pf=19, and MPm=12).
Figure 12 (a) shows the waiting time improvement I for the various percentages of CPs carried by the MCSs, where the total number of CPs is fixed to 240, and we consider the scenarios where 5%, 10%, 15% and 20% of CPs are equipped on MCSs in the experiments. The EV arrival rate λ is fixed to 1.04. Clearly, when the percentage of mobile CPs is fixed, the improvement I of the waiting time increases with the number of the MCSs M.
Figure 12 (b) shows the waiting time improvement I as the function of MCS number. Compared to the FCS network, the improvement of W performance is significantly improved by the MCS network with 10% mobile CPs allocated to the
MCSs; that is, allocating a small amount of CPs to MCSs can obtain significantly performance improvement. Thus if the budget for building an MCS network is limited, and the MCS network operator would like to reduce the waiting times of EVs, then allocating 10% CPs to MCSs is an appropriate choice. Furthermore, the improvement I increases insignificantly after M>6. Thus for better MCS investment, the operator can limit the number M to less than 6 to save the operating costs and still efficiently reducing the waiting times of EVs.
5. Conclusions
This paper proposed two types of smart grid networks for an EV charging: the Fixed Charging Station (FCS) and the Mobile Charging Station (MCS) networks. The FCS network only utilizes fixed charging stations. The MCS network combines FCSs with mobile charging stations dispatched by a Mobile Charging Information Management System (MC-IMS). The simulation experiments are conducted to investigate the waiting time performance for these smart grid networks. Our experiments indicated that the MCS network has better waiting time performance than the FCS network. The advantage of the MCS network over the FCS network becomes very significant when the EV arrival rate is large.
In this paper, every FCS location has infinite waiting capability. In the future, we will extend our study to consider FCS locations where the parking spaces are limited.
Acknowledgement
This paper was supported in part by the ITRI/NCTU JRC Research Project, the ITRI Advanced Research Program under B301EA3300, B301AR2R10, and B352BW1100, NSC 100-2221-E-009-070, Chunghwa Telecom, IBM, Arcadyan Technology Corporation, Nokia Siemens Networks, Department of Industrial Technology (DoIT) Academic Technology Development Program 100-EC-17-A-03-S1-193, the MoE ATU plan, and the Technology Development Program of the Ministry of Economic Affairs (MoEA TDP), Taiwan.
Reference
Abdi, M.R., & Sharma, S. (2007). Strategic/tactical information management of flight operations in abnormal conditions through Network Control Centre.
International Journal of Information Management, 27(2), 119-138.
Baker, S. (2011). V2G and G2V: It’s about grid scale storage. Retrieved on
2012-05-20, from
<http://bpiconference.com/blog/wp-content/uploads/2011/10/Baker_Scott.pdf>.
Gan, C.-H., & Lin, Y.-B. (2007). Push-to-Talk service for intelligent transportation systems. IEEE Transactions on Intelligent Transport Systems, 8(3), 391-399.
Imai, K., Ashida, T., Zhang, Y., & Minami, S. (2008). EV range extender: Better mileage than plug-in hybrid? Paper presented at the IEEE vehicle power and propulsion conference (pp. 1-3), Hei Longjiang, China.
Kim, P.-S. (2003). Cost modeling of battery electric vehicle and hybrid electric vehicle based on major parts cost. Paper presented at the fifth international conference on power electronics and drive systems (pp.1295-1300).
Lee, M.-Y. (2007). Electric Vehicle is much better in Taiwan. Retrieved on 2012-05-20, from <http://sa.ylib.com/read/readshow.asp?FDocNo=1712>.
Li, Z., Sahinoglu, Z., Tao, Z., & Teo, K. H. (2010). Electric vehicles network with nomadic portable charging stations. Paper presented at the IEEE 72nd vehicular technology conference fall (pp. 1-5), Ottawa, Canada.
Miao, Y.-Y. (2008). Wind power generation yearly supports the energy consumption of 230 thousand households in Taiwan. Retrieved on 2012-05-20, from
<http://e-info.org.tw/node/37206>.
Ministry of Transportation and Communications (2011). Monthly statistics of transportation and communications. Retrieved on 2012-05-20, from
<http://www.motc.gov.tw/uploaddowndoc?file=mebook/10004book.pdf&filedisp lay=10004book.pdf&flag=doc>.
Nissan USA (2012). The new car: features and specifications. Retrieved on
2012-05-20, from
<http://www.nissanusa.com/leaf-electric-car/index#/leaf-electric-car/specs-featur es/index>.
Nor, J. K. (1993). Art of charging electric vehicle batteries. Paper presented at the WESCON/'93. conference (pp. 521-525), California, USA.
NUVVE Corporation (2012). SMART GRID powered by V2G. Retrieved on 2012-05-20, from <http://www.nuvve.com/>.
Ogiela, M. R., & Ogiela, L.(2012). DNA-like linguistic secret sharing for strategic information systems. International Journal of Information Management, 32(2), 175-181.
Sahinoglu, Z., Tao, Z., & Teo, K. H. (2010). Off-Grid portable EV charging network management with dynamic energy pricing (pp. 403-408). Paper presented at the international IEEE conference on intelligent transportation systems, Madeira
Island, Portugal.
Schofield, N., Yap, H. T., & Bingham, C. M. (2005). A H2 PEM fuel cell and high energy dense battery hybrid energy source for an urban electric vehicle. Paper presented at the IEEE international conference on electric machines and drives pp.1793-1800, Texas, USA.
Su, W., Eichi, H. R., Zeng, W., & Chow, M.-Y. (2008). A survey on the electrification of transportation in a smart grid environment. IEEE Transactions on Industrial Informatics, 8(1), 1-10.
Taiwan Area National Freeway Bureau of MOTC (2012). The official site of Taiwan area national freeway bureau of MOTC. Retrieved on 2012-05-20, from
<http://www.freeway.gov.tw/>.
Tesla Motors (2011). Increasing energy density means increasing range. Retrieved on 2012-05-20, from <http://www.teslamotors.com/roadster/technology/battery>.
U.S. Fuel Economy (2011). Electric vehicles. Retrieved on 2012-05-20, from
<http://www.fueleconomy.gov/feg/evtech.shtml>.
Verma, A. K., Singh, B., & Shahani, D.T. (2011). Grid to vehicle and vehicle to grid energy transfer using single-phase bidirectional ACDC converter and bidirectional DC - DC converter. Paper presented at the international conference
on energy, automation, and signal (pp.1-5), Bhubaneswar, India.
Winkler, T., Komarnicki, P., Mueller, G., Heideck, G., Heuer, M., & Styczynski, Z. A.
(2009). Electric vehicle charging stations in Magdeburg (pp. 60-65). Paper presented at the IEEE vehicle power and propulsion conference.