1. 前 言
永磁馬達驅動技術仰賴硬體與軟體的整 合,近年來硬體配件發展快速,許多元件採用 更好的製程,除體積縮小,效能更佳外,各家 廠商亦強調元件為低功耗,包含半導體功率 元件、電力電子元件等。在數位訊號處理器 (digital signal processer, DSP),速度與效能快速 提升下,解決以往處理速度不夠,運算解析度 不足,無法開發高階演算法的短處。使無刷馬 達(brushless DC motor)控制性能得以精進,透 過準確相位控制技術,能提高能量轉換效率,
減少耗電量,達到節能目的。同屬無刷馬達的 永磁同步馬達(permanent magnet synchronous motor, PMSM),相較於傳統有刷馬達擁有高
功率密度、高轉換效率、高轉矩產生能力、
低噪音、且免維護等優勢[Gamazo-Real, et al., 2010]。被廣泛運用到眾多設備,如家電設備、
電動車輛、空調系統、工業設備與軍事設備 等。Demmelmayr等人指出透過高效率的馬達驅 動可對節能做出貢獻,令永磁馬達越來越被重 視,因永磁馬達的節能潛力可達到感應馬達的 兩倍[Demmelmayr, et al., 2011]。近年採用無位 置感測器控制的關鍵技術成為主流,其可降低 製造成本,同時提高系統可靠度。該類技術依 據永磁馬達的操作頻率可分為,較適合高頻應 用的馬達反電動勢估測法,因馬達反電動勢訊 號與轉速成正比,轉速越高,訊號就越不容易 被雜訊干擾。以及較適合低頻應用的高頻注入 法(high frequency injection),因低頻操作時反電
Volume 4, No. 4, December 2017, pp. 431-444
高速高功率永磁馬達驅動與節能關鍵技術開發和應用
范家瑞
1*陳浩瑋
1黃振瑋
2王建昌
3摘 要
由於全球環保意識抬頭,碳排放量成為評價工業節能的關鍵參考指標,亦帶動著高效率技術 發展方向。本文討論變頻器功率模組內,寬能隙半導體材料特性和應用優勢,以及永磁馬達國際趨 勢,並蒐集市場分析資料。技術開發與應用部分,首先透過有限元素分析進行自製馬達之效率模 擬,預估高速永磁馬達在不同工況點下的性能與效率。利用實做之馬達,探討高速永磁馬達驅動與 節能關鍵技術,包含如何使用估測器進行無位置感測器驅動,以及實際將永磁馬達驅動在高頻時須 注意的關鍵事務,如電抗器的選用,向量控制的前饋相位補償技術。最後透過實驗對自製高速永磁 馬達與高頻變頻器運轉效率做驗證,從結果可得知變頻器的高效率表現。馬達部分不如模擬高效 率,是因為模擬不計風損耗、摩擦損耗與各項雜散損耗。值得注意的是工業機台的運轉,能源大多 損耗於電動機上,而視電動機負載狀況所做之變頻控制,能減少耗電量,尤其是高功率應用場合,
節能潛力甚大。
關鍵詞:寬能隙半導體,永磁同步馬達,無位置感測器控制,高頻相位補償
收到日期: 2017年08月07日 修正日期: 2017年10月30日 接受日期: 2017年11月13日
1 工業技術研究院綠能與環境研究所副工程師
2 工研院綠能所研究助理
3 工研院綠能所資深研究員
*通訊作者, 電話: 03-5918553, E-mail: CJFan@itri.org.tw
動勢訊號較小[Bojoi, et al., 2013]。拜硬體配件 性能提升所賜,許多運算量較大的控制演算法 亦廣泛被探討。Amin和Aziz利用Luenberger狀 態觀測器(Luenberger state-based observer)估測 轉速以及轉子位置,轉速再透過模糊控制(fuzzy logic controller, FLC)修正,並透過實驗表示其 控制器對突然加載與卸載有良好響應[Amin and Aziz, 2017]。Ameur等人採用Luenberger狀態觀 測器估測轉速以及轉子位置,搭配Type-2的模 糊控制進行定子電阻值的估測,以消除參數變 化帶來的影響[Ameur, et al., 2016]。Lazi等人 亦使用模糊控制器實現無位置感測器控制,指 出該方法對非線性或複雜而難以建模的系統特 別適合。並提到一般觀測器是利用線電壓(line voltage)以及相電流(phase current)達到直接或 間接的估測轉速和轉子位置。而其使用旋轉座 標上電壓電流方程式達到估測效果,並經由模 擬驗證[Lazi, et al., 2016]。Elbeji和Hamed透過 模擬驗證人工神經網路(artificial neural network) 可準確估測永磁馬達轉速[Elbeji and Hamed, 2017]。由上述這些近期文獻可觀察出,自適 應類型的控制器越來越多人嘗試使用,代表具 未來性。本文採用的方法為馬達反電動勢估測 法,模擬與實做的永磁馬達應用項目,屬於空 調領域之冰水機系統。為了將國內產業發展方 向與國際趨勢接軌,進行高速永磁馬達相關驅 動技術開發與實做。
2. 寬能隙半導體技術與永磁 馬達應用之國際趨勢
2.1 國際寬能隙半導體技術發展現況
變頻器中絕緣柵雙極電晶體(insulated gate bipolar transistor, IGBT)模組的能效直接影響到 變頻器能量轉換效率。現今半導體產業為因應 國際環保與節能趨勢,多著重在降低元件導通 和元件高速切換時的耗功,以提高模組單體效 率。其中半導體材料的開發至關重要,擁有寬
能隙(wide bandgap, WBG)特性而能耐高壓與承 受大電流的傳統碳化矽(silicon carbide, SiC)元 件,已有十多年的發展歷史,因產品良率高,
成本可壓低,為目前市場上功率模組的主要材 料。但近年來氮化鎵(gallium nitride, GaN)元件 漸漸嶄露頭角,同樣擁有寬能隙特性的氮化 鎵,具有相較於碳化矽更快的切換頻率,且導 通損耗更低,如製程良率能提高,使成本得以 降低後,必定會成為中小功率市場應用主流,
國際上氮化鎵相關研發成果也將漸漸轉化為商 品。如將碳化矽與氮化鎵特性進行比較,兩者 都適合高電壓操作,市面上氮化鎵已經有600 V 耐壓的產品,碳化矽則更高。較高元件切換速 度與較小導通損失,讓氮化鎵在效率上略勝一 籌。但應用在高溫場合,碳化矽會是比較適合 的材料,因具有相較於氮化鎵更高導熱特性。
以產品功率來說100 kW會是選用氮化鎵和碳化 矽的分界點,如果產品功率等級高於100 kW,
則碳化矽目前是唯一選擇。在產品功率未達100 kW的情況下兩者如何抉擇,需要對成本與效 能作權衡。整體來說,氮化鎵是充滿商機的材 料,未來必定搶占功率模組的中小功率市場,
國內應以此為發展方向。
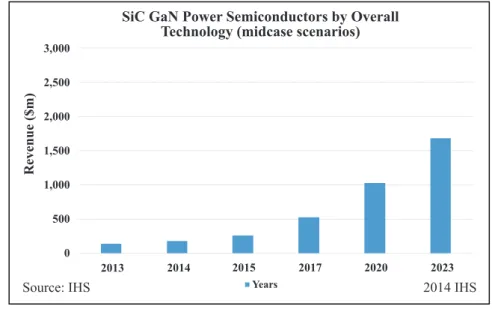
根據IHS Technology對於功率半導體的報 告顯示,在未來幾年,受到電源供應器、電信 設備、電動車、太陽光電設備、風力發電機,
以及工業馬達驅動器…等等,一般能源和綠色 能源需求下,新興的碳化矽和氮化鎵功率半導 體元件市場將穩定成長,預計在2023年以前,
碳化矽和氮化鎵功率元件的全球銷售額將大幅 增加到18億美元[Eden, 2016]。圖1為2016年IHS Technology對全球碳化矽和氮化鎵功率半導體 市場預測。可從中觀察到綠色能源在國際上是 相當被看好,這些更高效率,更節能的寬能隙 半導體產品,市場需求是逐年上升。
2.2 國際馬達技術發展現況
國際馬達技術發展的趨勢,由於環保意識 抬頭,讓應用在各種不同產業中的馬達,目標
不僅止於降低製造成本,和提高單體效能。節 能及周圍環境的品質,如噪音,尤其關鍵,依 國際能源總署(International Energy Agency, IEA) 分析,以馬達為核心驅動的機械設備,為目前 工業中耗電量之首,佔全球總用電量的46%。
正因如此,為了追求永續發展,發展高效率的 馬達早已成為各國共同目標,國際間馬達效 能標準可分為IE1 (standard)、IE2 (high)、IE3
(premium)與IE4 (super premium)。為了降低馬 達的能源消耗,許多馬達製造商開始將開發重 點轉向永磁馬達。
永磁馬達採用的是稀土磁鐵作為馬達轉子 磁極材料,由於稀土金屬資源取得不易,且為 勞動性密集產業,隨著金屬資源逐漸減少與勞 動成本提高,磁極材料逐步轉移到中國發展,
使其成為稀土生產大國,圖2為Statista於2017年 圖1 全球碳化矽(SiC)和氮化鎵(GaN)功率半導體市場預測
資料來源: IHS Technology Research 2016, https://technology.ihs.com/521146/sic-gan-power- semiconductors-2016
圖2 2013~2018年中國與世界其它國家稀土生產量預測
資料來源: Statista Projection 2017, https://www.statista.com/statistics/279953/rare-earth-production-in- china-and-outside/
Projected rare earth production for China and the rest of world from 2013 to 2018
2017 Statista
China
Source: Statista Projection 2017
Production in metric tons REO
200,000 150,000 100,000 50,000
0 2013 2014 2015 2016 2017 2018
Rest of world
SiC GaN Power Semiconductors by Overall Technology (midcase scenarios)
2014 IHS
Years
Source: IHS
Revenue ($m)
3,000 2,500 2,000 1,500 1,000 500
0 2013 2014 2015 2017 2020 2023
針對2013~2018年中國與世界其它國家稀土生 產量預測,2018年中國依然占有世界50%以上 的供應量。然而,因為過度開採引發許多交易 和環境問題,近年來國際研究機構亦將許多資 源投入到不同材料的研究與開發,如奈米複合 永磁體(nanocomposite permanent magnets)。
永磁馬達轉子磁場是由永磁體產生的,一 般擁有較高功率因數,還具有響應速度快、運 行平穩、噪音小與體積小等諸多優點,因整體 效率上的優勢,近年來永磁馬達市場需求量大 增。全球永磁馬達市場在2020年預計將達到453 億美元,且年均複合增長率(compound annual growth rate, CAGR)為11.7% [Rajput, 2015],圖3 為2015年來自Allied Market Research的全球永磁 馬達市場需求預測。
由於可靠的性能、耐久性和相對較好的電 氣穩定性,永磁電動機已經在許多機器上使用 多年,包含鼓風機、泵浦、壓縮機和冷凍空調 行業等,都是使用永磁電動機常見例子。近年 來全球暖化,溫度上升造成用電量屢創新高,
其中冷凍空調佔全部用電量很大比例,位於冰 水機內的壓縮機就如同空調系統的心臟,消耗 的電力約佔中央空調的60%。使用永磁馬達的 壓縮機,無論耗功與效率皆能比感應馬達更
佳,在永磁馬達驅動方面如能發展高可靠度的 無位置感測器技術,便能準確知道永磁馬達轉 子位置,進行磁場導向控制,不僅能滿足控制 性能的需求,變頻控制對減少用電量也有相當 的幫助。
3. 高速永磁馬達驅動與節能 關鍵技術
永磁馬達種類繁多,轉子不同的磁鐵配置 方式可以產生不同特性,依照結構大致上可概 分為表面貼磁式永磁同步馬達(surface mounted PMSM, SPMSM),及內嵌式永磁同步馬達 (interior PMSM, IPMSM)。表面貼磁式永磁同 步馬達具有較平順的轉矩,可達到穩定輸出,
但磁鐵位於轉子表面,需額外機構固定,避免 高轉速下磁鐵損壞,本文即以此種類型的永磁 馬達為探討對象。另一方面,內嵌式永磁同步 馬達具有多種磁鐵形狀,及安裝上的變化以獲 得較高轉矩產生能力,同時具有堅實之轉子 結構。然而,內嵌式永磁同步馬達的頓轉轉矩 (cogging torque)與漣波轉矩較大,不適用於定 位伺服應用場合。本章節將先對高功率高轉速 表面貼磁式永磁馬達,進行有限元素法(finite
圖3 全球永磁馬達市場需求預測
資料來源: Allied Market Research 2015, https://www.alliedmarketresearch.com/permanent-magnet- motor-market
Global Permanent Magnet Motor Market
2015 Allied Market Research
Years
Source: Allied Market Research
Revenue ($Billion)
50 40 30 20 10
0 2013 2014 2015 2016 2017 2018 2019 2020
element)的效率模擬分析,並探討相關驅動和節 能關鍵技術,包含無位置感測器驅動方法、馬 達高頻操作下的控制相位補償,及高頻電抗器 的應用,最後透過實驗結果驗證自製馬達與變 頻器的效率。
3.1 高速永磁馬達效率模擬分析
針對高速表面貼磁式永磁同步馬達的設 計,首先利用有限元素分析進行馬達效率模 擬。圖4為建模後的2D模型,此永磁馬達採用 24槽、雙層繞組、並聯支數為2。繞組方式如圖 5所示。依照上述設計條件,對馬達空載27,600 rpm進行反電動勢模擬,峰值(peak)電壓約185
V,方均根值(root mean square, RMS)約130.8 V,結果如圖6所示。27,600 rpm空載時頓轉轉 矩大小值模擬如圖7所示,頓轉轉矩約只有±0.4 N•m,相較於額定輸出扭矩此值相對小,為可 接受範圍。圖8及圖9分別為永磁同步馬達空載 於27,600 rpm之馬達氣隙與定子齒部的磁通密 度,由圖中可知氣隙的磁通密度約0.8 Tesla,
而定子齒部的磁通密度則約為1.5 Tesla,符合 一般馬達設計時的要求限制。
運轉條件針對15,000 rpm、19,950 rpm、
22,650 rpm、25,000 rpm、27,600 rpm等五個工 況點進行模擬分析,本文永磁馬達是應用於離 心式壓縮機,上述工況點是透過壓縮機負載
圖4 65 kW表面貼磁式永磁同步馬達2D建模 資料來源:本研究繪製
圖5 65 kW表面貼磁式永磁同步馬達繞組方式 資料來源:本研究繪製
圖6 65 kW表面貼磁式永磁同步馬達於27,600 rpm空載下的反電動勢模擬 資料來源:本研究繪製
圖7 65 kW表面貼磁式永磁同步馬達於27,600 rpm空載下的頓轉轉矩模擬 資料來源:本研究繪製
圖8 65 kW表面貼磁式永磁同步馬達於27,600 rpm空載下的氣隙磁通密度模擬 資料來源:本研究繪製
圖9 65 kW表面貼磁式永磁同步馬達於27,600 rpm空載下的齒部磁通密度模擬 資料來源:本研究繪製
比例而定出。圖10、11、12為永磁同步馬達於 27,600 rpm,激磁電流 120 A(peak)下的加載模 擬結果,其輸出扭矩為12.46 N•m,輸出功率 36.02 kW,效率為95.6%。模擬結果不計風損 耗、摩擦損耗與各項雜散損耗,但包含銅損以 及鐵損。其餘工況點模擬結果如表1,效率依 序為79.4%、91.7%、93.8%、94.3%、95.6%。
該表可看出在馬達轉速較低,輸出功率不高時 效率較差,15,000 rpm時效率約只有79.4%,
但隨著馬達轉速提升至27,600 rpm時效率值可 到95.6%左右。由此趨勢可觀察出與變頻器相 同,當負載越接近滿載時效率越高。另只模擬
至27,600 rpm,36 kW的原因為與實驗比較,本 文所用的負載系統僅能加載至約30 kW,但此 馬達最佳效率點是設計在滿載65 kW時。
圖10 65 kW表面貼磁式永磁同步馬達於27,600 rpm,激磁電流120 A(peak)下的加載輸出扭矩模擬 資料來源:本研究繪製
圖11 65 kW表面貼磁式永磁同步馬達於27,600 rpm,激磁電流120 A(peak)下的加載效率模擬 資料來源:本研究繪製
表1 各工況點下馬達輸出性能與效率 馬達轉速
(rpm) 輸出扭矩
(N•m) 輸出功率
(kW) 馬達效率 (%) 15,000 1.66 2.60 79.4 19,950 5.36 11.19 91.7 22,650 7.55 17.92 93.8 25,000 8.17 21.39 94.3 27,600 12.46 36.02 95.6 資料來源:本研究整理
3.2 高速永磁馬達關鍵驅動技術
高速永磁馬達驅動關鍵技術包含無位置 感測器驅動演算法,馬達高頻操作下的控制相 位補償技術,及高頻電抗器(inductor)的使用。
無位置感測器驅動的優勢為可靠度高,當操 作於較惡劣的工業環境時,因位置感測器可 能失準,造成閉迴路系統不穩定,永磁馬達的 轉子也可能因相位控制不準確而消磁。移除
位置感測器後,不僅可降低成本,亦省去安裝 位置感測器的工程。對馬達設計者而言,不 需預留位置感測器的空間,也可以讓馬達整體 結構更加強健。值得注意的是,如果馬達運作 的頻率較高,市售感測器的解析度就會不足,
造成控制精準度降低,或無法控制。本文控 制架構如圖13所示,包含磁場導向控制(field oriented control, FOC)、擴展反電動勢(extended back EMF)的觀測、位置誤差的計算和轉速 圖12 65 kW表面貼磁式永磁同步馬達於27,600 rpm,激磁電流120 A(peak)下的加載輸出功率模擬
資料來源:本研究繪製
圖13 永磁同步馬達無位置感測器控制方塊圖 資料來源:本研究繪製
修正,以及轉子位置前饋補償(feed forward control)。因為磁場導向控制中的帕克轉換(park transformation)需要用到轉子位置,傳統方法透 過位置感測器取得,無位置感測器方式則為不 同架構,利用額外的觀測器(observer),將馬達 電流與電壓訊號計算以取得轉子位置。本文所 採用的無位置感測器演算法為擴展反電動勢法 [Chen, et al., 2000;Morimoto, et al, 2001],是 透過數學上的技巧避免掉繁雜的計算,再自行 假設一個落後於實際轉子的旋轉座標(γ–δ)。式 (1)為實際轉子位於d-q軸上之數學模型
(1) 其中ω為實際轉速、ψ為磁通鏈、ρ為微分運算 子、id 和iq 為d-q軸電流、Ld 和Lq 為d-q軸電感、
Ra 為電阻、vd 和vq 為d-q軸電壓。式(2)為位於γ –δ軸上之數學模型
(2)
其中iγ 和iδ 為γ–δ軸電流、vγ 和vδ 為γ–δ軸電 壓、Eex =ωψ+ρ•(Lq ‒Ld)iq +ω(Lq ‒Ld)id 為擴展 反電動勢、ω為估測轉速、θe 為實際d-q軸與假 設γ–δ軸間的角度差。上式(2)可再進一步整理 為
(3) 其中eγ 和eδ 分別為γ–δ軸的擴展反電動勢。此 方法視馬達反電動勢為一個外部干擾,利用干 擾觀測器(disturbance observer, DOB)對假設軸 的擴展反電動勢進行觀測,圖14為估測擴展反 電動勢之干擾觀測器方塊圖,其中gr 為低通濾 波器截止頻率、eγ 為所估測的γ軸擴展反電動 勢。紅色虛線部分為干擾觀測器架構。δ軸的 擴展反電動勢亦可利用相同原理獲得,其後使 用反正切(arctangent)可計算出誤差角度,可參 考[Morimoto, et al, 2001]。
完整流程為擷取馬達電壓和電流訊號,計
算擴展反電動勢以及誤差角度,誤差角度透過 比例積分控制器(PI controller),對轉速誤差進 行修正,進而得到估測轉速以及估測位置,取 得轉子位置後,即可完成永磁馬達的磁場導向 控制。其中干擾觀測器主要是用來觀測系統的 等效干擾,鑒於干擾觀測器須先決定標稱受控 場(nominal plant),因此需要使用到馬達電氣 參數。但馬達電氣參數並非固定值,多為離線 (offline)量測得到的數值,實際操作時會受到 高頻操作影響而產生集膚效應(skin effect)、鄰 近效應(proximity effect),此外也受操作溫度 (temperature)之影響。當操作功率高時,溫度上 升無可避免,參數變動絕對會影響到估測精準 度,除了須注意模型誤差外,干擾觀測器內之 低通濾波器需要針對雜訊抑制,以及相位落後 進行均衡設計。馬達高頻操作時控制相位補償 也必須要同時發展,唯須注意高速動態補償危 險性較高,操作不慎容易損壞永磁轉子。
永磁同步馬達的控制相位補償技術,主 要著重在磁場導向控制中座標轉換時的補償,
目的是調整控制相位,補償控制迴路中使用數 位、類比濾波器,或者其它硬體迴路與軟體計 算上造成的延遲,修正變頻器輸出電壓的相 位,讓電流與永磁馬達的反電動勢同相位,減 少變頻器輸出的虛功。相位補償方面本文採用 轉子位置前饋補償,由於不同轉速所需要補償 的角度不同,使用到的參數共有三個,包含取 圖14 估測擴展反電動勢之干擾觀測器方塊圖
資料來源:本研究繪製
v i
= +
d d 0
d a q
q L R L q
v i
+ −
+
Ra Ld Lq
v Ra Ld Lq i
sin ˆ
cos
q a d
e
ex d
e
L R L
v i
E L i
i
+ −
= +
−
+ − + −
+ −
a d q
q a d
v R L L i e
L R L
v = + i + e
ˆ
樣時間,轉子轉速以及補償常數,取樣時間一 般來說選定後即不會再改變,轉速因為動態的 變化,讓轉速誤差修正的比例積分控制器選用 成為重要的工作,轉速修正屬於無位置感測器 估測的部分,比例增益以及積分增益可設計為 [Morimoto, et al, 2001]
(4) 其中ωn 為自然頻率(natural frequency)、ζ為阻尼 常數(damping ratio),透過兩個變數的選用可完 成設計。阻尼常數建議選為1,自然頻率因為系 統不同,並沒有建議值,可透過實測選擇最穩 定的參數。最後補償常數本文選1.5作為補償角 度的修正量,這個參數一樣是透過實驗獲得,
不同系統應有不同修正量,具體方式透過馬達 運轉的情況下觀察電流波形,微調修正量以觀 察電流變化,一般來說相位偏差變大的話,電 流波形峰值會放大,反覆調整後可找到補償修 正的最佳值。在對永磁馬達進行相位的補償 後,可改善變頻器效率,達到節能效果,並且 降低馬達振動與噪音[Lee, et al., 2017]。
值得注意的是,高速馬達定子線圈的電阻 值與電感值均非常小,低電阻值有助於降低導 通時損耗在線圈上的能量,也有助於控制馬達 溫度,要注意當溫度升高後,轉子會更容易被 消磁。而低電感值雖有助於電流的快速響應,
但因為對高頻的阻抗降低,造成濾波效果不 佳,電流漣波過大。故馬達高頻操作時需要外 加高頻電抗器,以濾除高頻諧波成分,圖15為 本文所使用之電抗器,其為高頻鐵粉芯電感,
電感值較高,經過其濾波後所測得之高頻電
流成分較小,且鐵粉芯特性也較適合於高頻操 作,電感溫升效應較不顯著。須注意馬達高頻 高功率應用並不推薦矽鋼片電感,因為高頻成 分高,溫度上升過快。
3.3 實驗結果
本文所開發的高速永磁馬達以及PM變頻 器,最終目標為使用於冰水機系統上,現階段 是進行單體性能測試,所開發之65 kW PM變頻 器如圖16所示,控制核心採用德州儀器(Texas Instruments, TI)生產之C2000系列浮點運算數位 訊號處理器TMS320F28335,擁有150 MHz主 頻,八個流水線級(pipeline stage),後級採用國 內廠商模組。在此控制功率晶體開關的PWM 頻率設為10 kHz,傳統硬切換變頻器開關頻率 約8~12 kHz,無法提高的原因為風冷式散熱對 功率模組散熱能力不足,如改為水冷式散熱便 可解決此問題,水冷式變頻器本單位也在研發 中,水冷在冰水機系統上有著不用額外製造水 源的優勢,直接有室溫水可取用對變頻器散 熱,馬達轉定子亦可使用冷媒進行冷卻,讓高 功率且高溫部件運作在最佳溫度。
功率模組驅動部分,有規劃適當的死區 時間(dead time),本實驗設為1.5 μs,此值與操 作電流大小有關,可保護絕緣柵雙極電晶體上 圖15 高頻鐵粉芯電感
資料來源:本研究繪製 K =p 2 n, Ki = n2
圖16 PM變頻器 資料來源:本研究繪製
下臂不會因為過短死區時間而被擊穿。為了進 行高精度相位控制,A/D轉換器採用外部14位 元快速類比數位轉換晶片,並搭配硬體濾波電 路,對高頻切換的10 kHz電流訊號進行濾波,
以達到良好控制。另外,亦設計12位元之D/A 轉換器,可將數位訊號處理器的內部資料輸出 至示波器進行分析。
待測馬達為自製的65 kW 四極表面貼磁式 永磁馬達,透過耦合一同款式永磁同步馬達當 成發電機,如圖17所示,以電阻性負載調整待 測馬達之負載轉矩,此負載系統約可加載至30 kW,故以此最大加載能力做實驗。表2為永磁 馬達加載測試結果,總共進行五個點的測試,
測試的頻率分別為499.6 Hz、666.7 Hz、756.6 Hz、835.2 Hz以及920.7 Hz。相關扭矩、馬達 輸出功率、變頻器輸入輸出功率,以及馬達與 變頻器效率如表內所示,從中可觀察到變頻器 效率在輸出功率提升至半載以後達到94.9%的
效率,可以預期當全載輸出時可望達到更高效 率。馬達效率則約77%~81%,操作頻率提高 後與模擬結果有些落差,這是因為模擬時並 不考慮實際上的摩擦損、風損,以及雜散損失 等等。當馬達運作在低頻約499.6 Hz時實測效 率和模擬效率是非常接近的,僅1.7%差距。
但頻率提高後兩者誤差開始加大,這是可以預 期的,因為摩擦損失與風損失都會隨著轉速增 加而上升。雜散損失則主要為電磁波輻射,損 失與輸入電流的平方成正比,當負載增加電流 上升,雜散損失也會上升。這些都是造成實測 效率和模擬效率有差距的原因。另外此顆馬達 有對不同工況點的效率進行優化,讓馬達在多 個特定轉速都可以擁有不錯的效率,從結果看 來,馬達效率是十分平均。整體而言,變頻器 效率相當不錯,馬達亦達到要求,展現出永磁 馬達的潛力。圖18為PM馬達運作在920 Hz下之 電流與控制相位關係,黃色為利用電流鉤錶得 到的馬達其中一相之線圈電流(50 A/div),由圖 中得知峰值電流約140 A。為了方便觀察,綠 色為利用D/A轉換器輸出的磁場導向控制相位 (500 mV/div),在控制中其值介於‒π至π之間,
以D/A輸出後會有一個增益修正,與偏壓將電 壓位準抬高,因為D/A無法輸出負值,施加偏 壓後,可以觀察‒π至π之間的變化,該波形之波 峰對應π,波谷對應‒π。綠色與黃色訊號的關 係為,控制器相位輸出後與所造成的線圈電流 關係。須注意的是,因自製65 kW永磁馬達並 無裝設位置感測器,無法提供絕對位置來和無 感測演算法估測出,並加上修正量的位置做比 圖17 耦合之同款永磁同步馬達動態負載測試
系統
資料來源:本研究繪製
表2 永磁馬達加載測試結果 變頻器頻率
(Hz) 馬達轉速
(rpm) 扭矩
(N/m) 馬達輸出
功率(kW) 變頻器輸出
功率(kW) 變頻器輸入
功率(kW) 馬達效率
(%) 變頻器效率 (%) 499.6 14,988 1.68 2.636 3.392 4.008 77.7 84.6 667.0 20,010 4.97 10.414 13.057 14.096 79.8 92.6 756.6 22,682 7.44 17.671 21.596 22.986 81.8 94.0 835.2 25,056 8.29 21.751 26.812 28.385 81.1 94.5 920.7 27,622 9.57 27.681 34.355 36.197 80.6 94.9 資料來源:本研究整理
較,如果希望驗證控制相位的準確性,必須選 用有位置感測器的馬達。關於電流,相位控制 如有偏差,電流一樣會維持弦波形式,但峰值 可能會有變大的情況,電流如果小一點對於控 制馬達溫度也比較容易,永磁馬達如果心軸溫 度偏高會更容易被消磁,如文中提及,相位控 制不準確也會使永磁馬達消磁,固無法隨意對 相位做太大的改變進行測試。
對於馬達系統的節能可分為兩種類型,
第一種為提升馬達效率的高效馬達技術開發,
第二種為高效變頻器與馬達驅動技術開發,本 文主要著重在驅動技術的開發,但對馬達系統 來說,高功率高效率的馬達設計製造亦十分重 要。而關鍵技術又可再區分為硬體類型與軟體 類型,高效馬達技術主要為硬體類型,包含材 料的開發和選用,先進製程開發等等,目的為 製造符合國際能效標準的馬達。高效變頻器與 馬達驅動技術則兩種都包含,如前述可使用氮 化鎵的新型半導體材料,透過提升硬體達到效 率提升與節能。本文則著重在軟體面的開發實 作,企圖開發低成本、高效率及高可靠度的馬 達系統,關鍵技術包含無位置感測器演算法 內,干擾觀測器的應用,轉速誤差修正的比例 積分控制器參數選用,以及修正延遲的相位前 饋控制,對相位進行適當補償可提升變頻器與
馬達的效率,降低震動與噪音,本文在負載半 載情況下變頻器即可達到94.9%的效率。
4. 結論與未來展望
本研究透過市場調查瞭解永磁馬達和變頻 器內功率模組的國際趨勢,並由馬達模擬分析 到實做應用,探討其中的驅動節能關鍵技術。
從實驗結果可得知馬達和變頻器都有不錯的效 能,馬達部分因為摩擦損失,以及風損失造成 高頻操作時的效率降低,如果導入磁浮軸承則 能解決相關問題。值得注意的是,現今環境永 續及綠色經濟被視為十分重要的議題,相關技 術的發展已成為國際趨勢。在工業中占據核心 耗電部分的電動機,其性能對整體的節能影響 甚巨,各國因此投入高效率馬達與高效率變頻 器的技術發展。為了提升國內技術,搶占市場 先機,本單位亦積極投入高速永磁馬達與其驅 動技術的開發,希望透過開發經驗協助國內廠 商國際化,為減少環境汙染、降低能源損耗,
減少碳排放盡一份心力。
誌 謝
本文承經濟部能源局能專計畫「空調與高 圖18 PM馬達運作在920 Hz下之電流與相位關係
資料來源:本研究繪製
速流體機械節能關鍵技術開發計畫」經費之支 持,使本論文能順利完成,特此致上感謝之意。
參考文獻
Ameur,A., M. Kious, F. Ameur, I. Ameur, A.
Hadjadj, (2016). "Speed sensorless direct torque control of a PMSM drive based type-2 fuzzy logic stator resistance estimator and luenberger observer", 2016 8th International Conference on Modelling, Identification and Control (ICMIC), pp. 219-224.
Amin, Mahmoud and Ghada A. Abdel Aziz, (2017).
"A dynamic adaptive observer for speed sensorless intelligent control of PMSM drives", 2017 IEEE International Electric Machines and Drives Conference (IEMDC), pp.1-8.
Bojoi, R., M. Pastorelli, J. Bottomley, P.
Giangrande, C. Gerada, (2013). "Sensorless control of PM motor drives — A technology status review", 2013 IEEE Workshop on Electrical Machines Design, Control and Diagnosis(WEMDCD), pp.168-182.
Chen, Zhiqian, M. Tomita, S. Ichikawa, S. Doki, S. Okuma, (2000). "Sensorless control of interior permanent magnet synchronous motor by estimation of an extended electromotive force." Industry Applications Conference, 2000. Conference Record of the 2000 IEEE.
Vol. 3: pp. 1814-1819.
Demmelmayr, Florian, Markus Troyer, Manfred Schroedl, (2011). "Advantages of PM- machines compared to induction machines in terms of efficiency and sensorless control in traction applications", IECON 2011 - 37th Annual Conference of the IEEE Industrial Electronics Society, pp.2762-2768.
Eden, Richard, (2016). "SiC & GaN Power Semiconductors – 2016." IHS TECHNOLOGY.
Elbeji, Omessaad and Mouna Ben Hamed, (2017).
"Sensorless vector control of permanent magnet synchronous motor using neural network observer", 2017 International Conference on Green Energy Conversion Systems (GECS), pp.1-6.
Gamazo-Real, J. C., E Vázquez-Sánchez, J.
Gómez-Gil, (2010). "Position and speed control of brushless dc motors using sensorless techniques and application trends"
Sensors, 10: pp. 6901-6947.
Lazi, Jurifa Mat, E Vázquez-Sánchez, J Gómez- Gil, (2016). "Fuzzy logic controller of PMSM for sensorless drives", 2016 IEEE International Conference on Power and Energy (PECon), pp.540-545.
Lee, An-Chen, C. J. Fan, G. H. Chen, (2017).
"Current Integral Method for Fine Commutation Tuning of Sensorless Brushless DC Motor."
IEEE Transactions on Power Electronics. Vol.
32: pp. 9249-9266.
Morimoto, Shigeo, K. Kawamoto, M. Sanada, Y.
Takeda, (2001). "Sensorless control strategy for salient-pole PMSM based on extended EMF in rotating reference frame." Industry Applications Conference, 2001. Thirty-Sixth IAS Annual Meeting. Conference Record of the 2001 IEEE. Vol. 4: pp. 1054-1061.
Rajput, Nilesh, (2015). "Permanent Magnet Motor Market by Motor Type (AC motors, DC Motors, Hermetic motors) Magnet Type (Neodymium, Samarium Cobalt, Ferrite), by Power Range (4.0 kW and below, Between 4.0 22.0 kW, Between 22.0 75.0 kW, 75.0 kW and above) and Applications (Factory Automation, Office Automation, Lab Equipment, Military/
Aerospace) - Global Opportunity Analysis and Industry Forecast, 2013-2020." Allied Market Research.
Development and Application of A Crucial Energy Saving Technology on High Speed and High Power Permanent
Magnet Motor Drive
Chia-Juei Fan
1*Hao-Wei Chen
1Zhen-Wei Huang
2Chien-Chang Wang
3ABSTRACT
Due to the awareness of environment, carbon emissions becomes a key index of industrial energy efficiency evaluation. Also led to the development of high-efficiency technology. Wide bandgap semiconductor material in power module of inverter and international trend of permanent magnet motor are discussed in this paper, including market analyzing reports investigation. In terms of technology development and application, finite element is used for the prediction of self-made motor efficiency and performance under different working condition. With the self-made motor, crucial high speed permanent magnet motor driving and energy saving technologies are discussed. Including how to use the observer for position sensor-less drive, as well as crucial things when operate permanent magnet motor at high frequencies. Such as used of the inductor and feed forward phase compensation in the vector control.
Finally, efficiencies of self-made high speed permanent magnet motor and high frequency inverter are verified by the experiment. High efficiency performance of the inverter is obtained. However, due to the neglect of wind consumption, friction consumption and stray losses. Experimental motor efficiency is worse than simulation results. In industrial, most of the energy is consumed on the motor. Frequency control depending on the motor load can reduce power consumption, especially for high power application. The potential of saving energy is tremendous.
Keywords:
wide bandgap semiconductor, permanent magnet synchronous motor, position sensor-less drive, high frequency phase compensationReceived Date: August 7, 2017 Revised Date: October 30, 2017 Accepted Date: November 13, 2017
1 Associate Engineer, Green Energy and Environment Research Laboratories, Industrial Technology Research Institute.
2 Research Assistant, GEL, ITRI.
3 Senior Researcher, GEL, ITRI.
*Corresponding Author, Phone: +886-3-5918553, E-mail: CJFan@itri.org.tw