多功能機車底盤動力計之設計
鄒忠全1 吳向宸1 陳財富2 鄭智元1
1崑山科技大學機械工程系
2台灣電力公司
摘 要
本文的目的在設計一套具有多種功能的機車底盤動力計,以適應現代體積 小、成本低、容易拆裝、一機多功能的實驗台之要求。它的功能可以測量機車 引擎的扭力與油耗、無段變速器的變速性能、離合器的作用特性、飛輪的慣性、
制動器的作用負載、和進行全車動態性能模擬與分析等,未來還可將其用來測 試電動機車與混合動力機車之性能。本文將敘述機車底盤動力計之構造設計,
以及如何使用此底盤動力計來測量機車的引擎扭力與油耗、無段變速器的效率 與減速比關係、離合器接合時之轉速與傳遞扭力的關係、飛輪的慣性、制動器 的作用負載、全車動態性能測試等的實驗方法與結果。
關鍵詞:機車,引擎,動力計,無段變速器,制動器。
THE DESIGN OF A MULTIFUNCTIONAL CHASSIS DYNAMOMETERS FOR MOTORCYCLES
Jong-Chyuan Tzou1 Shang-Chen Wu1 Tsai-Fu Chen2 Chih-Yuan Cheng1
1Department of Mechanical Engineering Kun Shan University Tainan, Taiwan 710, R.O.C.
2Taiwan Power Company Taipei, Taiwan 100, R.O.C.
Key Words: motorcycle, engine, dynamometer, continuously variable transmission, brake.
ABSTRACT
The purpose of this paper is to design a multifunctional chassis dynamometer for motorcycles to incorporate small size, low cost, easy disassembly, and multifunction integration in one test rig. It can be used for engine testing, CVT testing, clutch testing, flywheel testing, brake testing, and dynamic testing for a motorcycle. This paper will describe how to use this test rig to measure the engine torque and fuel consumption, the speed ratio and efficiency of a CVT, the actuation speed and transmitted torque of a clutch, the inertia of a flywheel, the road loads applied by the brakes, and dynamic testing of a motorcycle.
一、前 言
由於台灣地小人稠,交通擁擠,騎乘機車相當的普
及,使得機車的污染排放對空氣品質的衝擊相當大,因此 開發低污染高效能的機車已成為台灣機車工業的重點策略 之一。台灣機車產業已經有能力自行設計、開發與生產新
型機車,其技術已經由與國外機車廠技術合作模式轉變為 能夠完全自主研發並自創品牌、及自行開發零組件。
Plint 和 Martyr[1]說明各種不同的引擎動力計之分類 及優缺點,與其引擎動力計測試之控制模式。引擎扭力測 試可分為開迴路測試與閉迴路測試方法,閉迴路測試方法 主要分為位置模式 (position mode)、速度模式 (speed mode)、扭力模式 (torque mode) 和動力模式 (power mode) 等四種方法量測扭力。
現代速克達機車 (scooter) 的傳動系統大都配備皮帶 式無段變速器 (continuously variable transmission, CVT) 和離心式自動離合器 (automatic clutch)。CVT 的設計概念 最早在 1955 年由 Worley[2]所提出,他由觀察 CVT 的運動 特性,設計出皮帶使用期限的計算公式和經由實驗方式得 到 CVT 設計的半經驗公式,由此建立了皮帶張力與輪盤軸 向推力之間的關係式。1999 年陳財富[3]提出高效率皮帶式 無段變速器之改良設計,針對 CVT 系統受力做詳盡的理論 分析,並推導出其數學模式,並由實驗驗證其理論。2003 年 Shinobu 等人[4]敘述鈴木機車公司所研發出的電子控制 式無段變速器 (electronically-controlled CVT, ECVT),詳細 說明此系統之設計發展過程、構造、控制方式與性能,此 ECVT配置在該公司銷售的重型機車上。
在機車動力傳動系統之動態性能模擬方面,1996 年林 信吾[5]發表的無段變速機車性能模擬與測試分析,建立出 無段變速機車之整車性能模擬程式。2002 年林秋豐、曾全 佑[6]利用能量不滅定理與鍵結圖的方式,建立出無段變速 機車傳動系統之動態模型,其優點在於動態反應的計算上 相當地快速。
在機車自動駕駛部份,國內學者對此有較多的研究。
1996年 Hong[7]提出模糊控制策略設計應用在車輛底盤動 力計之自動駕駛。1997 年 Hong[8]發表無段變速機車之模 糊控制自動駕駛設計動態性能模擬,建構出完整的機車動 態模擬,並使用模糊控制達成自動駕駛。
目前機車業者或研究單位的實驗室所使用的動力計 都是單一功能的測試機台,如引擎動力計,CVT 動力計或 機車底盤動力計等,且強調其動態測量功能和人機介面友 善易操作。而本文所設計的多功能機車底盤動力計,具有 多種機車組件的測試功能。以下將說明多功能機車底盤動 力計的構造設計,並分別敘述如何使用機車底盤動力計測 量機車引擎的扭力和油耗、CVT 的變速性能、離合器的作 用特性、飛輪的慣性、制動器之作用負載和進行全車動態 性能測試等。
二、多功能底盤動力計之設計規劃
機車底盤動力計包括動力部份、傳動系統部份、機車 本體部份、產生道路負載的制動器部份、以及控制與訊號 測量部份。
動力部份:機車引擎或馬達。本文所設計的機車底盤
動力計的動力源,為光陽 125 cc 的噴射引擎或具 15 匹馬 力額定轉速 10000 rpm 之伺服型的三相感應馬達。馬達配 有非接觸式解碼器、強制散熱風扇及溫度開關,馬達由 15 HP、220 V 向量回授型變頻器控制,並具有轉速及扭矩控 制模式切換功能。
傳動系統部份:包括聯軸器、傳動軸、CVT/ECVT、離 合器和最終減速裝置。動力系統可透過正時齒輪/正時皮帶 或直接連接至 CVT/ECVT 的驅動輪軸。車體部份可與此系 統的最終減速裝置連接。最終減速裝置之減速比約 8.6。
機車本體部份:機車本體以一個慣性飛輪代替,表示 機車本身和騎乘者的慣性。慣性飛輪使機車底盤動力計更 能表達與實車相同的加減速之動態反應。
制動器部份:40 kg-m 的磁粉式制動器 (magnetic brake) 可提供實際行車時的道路負載,和提供 CVT/ECVT 系統在 性能測試時所需施加的負載。
控制與測量部份:機車底盤動力計上的測量儀器包含 扭力計 (torque transducer)、編碼器 (encoder) 以及位移計 (position sensor)。扭力計是使用應變規來測量傳動軸之扭 力變化,因此輸出訊號必須經過放大器 (amplifier) 放大。
致動器 (actuator) 的控制與感測器 (sensor) 訊號的測 量,都透過國家儀器公司 (National Instruments Inc., NI) 的 6024E 資料擷取卡 (DAQ 卡) 和圖控軟體 LabVIEW 進 行。圖 1 為機車底盤動力計的全景圖,圖 2 為機車底盤動 力計的示意簡圖,圖中的引擎可用馬達取代,ECVT 也可 用 CVT 代替。
在選購扭力計時,不可以只考慮引擎的額定扭力值,
因為在引擎啟動及熄火停止時,會有很大的扭力突波出 現,其扭力值可能達到 30 至 50 N-m,扭力變化如圖 3 所 示。
三、引擎扭力之測量、分析與驗證
1. 引擎扭力測量與分析
進行引擎扭力之測量時,其實驗設備規劃可如圖 4 所 示,並將其安裝在圖 2 之實驗台上。圖 4(a) 為引擎、扭力 計和馬達串接;圖 4(b) 為引擎、扭力計、減速機構和制動 器串接。原始設計是使用圖 4(a) 之測量方法,但在測量引 擎怠速運轉時的扭力,微調馬達所產生的制動扭力,往往 會造成引擎熄火。分析其原因,可能是引擎在怠速時其輸 出扭力較小 (受測的機車引擎之最大扭力約 8 N-m),但微 調馬達後其所產生的制動扭力會大於引擎的輸出扭力,讓 引擎轉速降低而熄火,不容易控制引擎的轉速。所以本實 驗室在進行引擎扭力測量時,是採取圖 4(b) 之方式,將待 測之機車引擎放置在動力傳動系統之動力源位置,並視其 空 間 配 置 , 其 後 可 經 正 時 皮 帶 或 直 接 連 接 扭 力 計 和 ECVT。調整 ECVT 的減速比,可給與引擎適當的負載並 使其達到所設定之轉速。磁粉式制動器的最高轉速為 1800
圖1 機車底盤動力計的全景圖
ECVT motor
Reduction gear Flywheel
Brake
Torque transducer
Encoder Encoder
Engine
Drive PC
Drive
Electronic throttle
PXI
Position sensor
Torque transducer
圖2 機車底盤動力計的示意簡圖
-20 -10 0 10 20 30 40 50 60
0 1 2 3
Time (s)
Torque (N-m)
Engine torque
圖3 引擎啟動時之扭力變化
Engine Torque
transducer Motor Computer
Throttle opening Load
Speed
Torque
(a)
(b) Computer
Throttle opening Load
Speed
Torque
Engine Torque
transducer
Speed reducer
Brake or motor
圖4 引擎扭力測試之設備規劃示意圖
rpm,引擎的轉速經由 ECVT 和最終減速裝置 (final drive) 的減速比,可降至制動器的工作轉速範圍內;同時制動器 所產生的負載扭力,也可以經由此減速比而縮小,如此可 微調作用在引擎上的負載扭力,使得引擎轉速的控制變得 更為容易。
測量方法是分別控制節氣門的開度和引擎的轉速。節 氣門的開度分別設定為 0%、10%、20%、…、100%,節 氣門的實際開度是經由節氣門位置感知器測量得知。而引 擎轉速的設定為 2000 rpm、2500 rpm、3000 rpm、…、8000 rpm,實際的引擎轉速由編碼器測量得到。在每一個節氣 門開度和引擎轉速下測量引擎扭力值五次,再取其五次的 平均值。
實驗進行是使用 NI 的 6024E 資料擷取卡和 LabVIEW 圖控軟體所撰寫的控制和資料擷取程式,控制引擎節氣門 的開度和制動器的負載,同時擷取引擎轉速和引擎扭力。
本實驗初期採用開迴路控制方式,即在所設定的節氣 門開度下,施給制動器某一電壓值使其產生固定的負載,
藉此控制引擎之轉速。但是會有很多的操作點無法測得,
因為引擎轉速會上下一直飄浮不定,所以微調時需花費很 多時間,使得制動器很容易過熱。
修正實驗進行方法,改採用閉迴路控制方式,即將引 擎的轉速回授信號與設定的引擎轉速 (set point) 作比
-1 -0.5 0 0.5 1 1.5 2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
Time (second)
Torque (N-m)
圖5 引擎怠速時的扭力變化
-1 -0.5 0 0.5 1 1.5
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 Time (second)
Torque (N-m)
圖6 引擎怠速時扭力放大圖
較,再經由比例控制器去控制制動器之電壓。因負載的改 變會改變引擎的轉速,使其到達所設定的轉速。但是擷取 回來的引擎轉速不是一個穩定值,它會上下飄動,所以擷 取回來後要經過 LabVIEW smoothing 的濾波功能後,才會 成為一個穩定的引擎轉速值。但是單純使用比例控制器 (P controller) 時會有穩態誤差的存在,所以還是要經過手 動方式去微調引擎轉速。
圖 5 為引擎在怠速運轉時之扭力變化,由實驗結果發 現其扭力值並非為定值,而是會作週期性的變化,其頻率 為引擎轉速的一半。
圖 5 中的每一個扭力波形之頻率為 15 Hz,剛好是引 擎怠速時轉速頻率的一半。因為四行程單缸引擎每兩轉才 會有一次動力行程,所以所測得的正的扭力值時期為引擎 的動力行程。此結果與一般的動力計的測量結果不同,因 動力計的測量結果是已經經過平均處理。
取圖 5 中一個週期的扭力圖作放大如圖 6 所示,其扭 力變化趨勢與文獻資料[1, 9]相同。將各測量點所測量到的 扭力值作平均運算後,表示為該操作點的扭力值。將測量 運算結果表示成圖 7 的引擎扭力曲線圖和圖 8 的引擎扭力 3D圖。
2. 馬達驗證引擎扭力值
接下來要驗證扭力計所測量得到的引擎扭力值是否 為正確,所以要經過馬達之測試驗證。如圖 6 所示,引擎 扭力值在動力行程為正值,而在其他行程為零或負值。將
Throttle opening 0
1 2 3 4 5 6 7 8 9
2000 3000 4000 5000 6000 7000 8000 Engine speed (rpm)
Engine torque (N-m)
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
圖7 引擎扭力曲線圖
0 2000 4000 6000 8000 0
50 1000
2 4 6 8 10
Engine speed (rpm) Throttle opening (%)
Engine torque (N-m)
圖8 引擎扭力3D圖
所測得之引擎扭力值,取平均值運算處理去計算每一週期 之引擎平均扭力值。所得到的值為當時節氣門開度與引擎 轉速下的扭力值,所以在這我們用馬達來驗證其正確性,
因為馬達的扭力輸出為一個比較平穩的值。
為比較引擎和馬達所產生的扭力值,制動器的操作狀 態必須是相同的,因為給與制動器相同的電壓值,其所產 生的制動扭力也會隨著制動器的轉速或工作溫度不同而有 所改變。將 ECVT 的減速比設定為一樣,在引擎轉速 4000 rpm和節氣門開度 70%下輸入制動器的電壓為 2.386 V,計 算出引擎之平均扭力值為 7.31 N-m。而馬達在相同的轉速 下所輸入給制動器的電壓為 2.4 V,其平均扭力值為 7.299 N-m,由此可驗證本實驗所測得之引擎扭力值是正確的。
3. 引擎油耗之測量
首先測量噴油嘴的噴油時間與其噴油量的關係,如圖 9所示。其次將引擎的轉速和負載固定,測量其噴油時間,
並換算出其噴油量,圖 10 為引擎噴油量的 3D 圖。
四、CVT性能測量與結果分析
CVT的性能測試,是測量 CVT 的減速比和傳動效率。
減速比和傳動效率的測試方法為穩態測試,不考慮離合器 作動接合時反應的過程,所以將被動輪盤與離合器鎖定。
0.002 0.004 0.006 0.008 0.01 0.012
3 4 5 6 7
Injection time (ms)
Fuel quantity (cc)
圖9 噴油時間與噴油量的關係圖
2000 3000 4000 5000 6000 0
2 4 60 0.1 0.2 0.3 0.4 0.5
Engine speed (rpm) Load (N-m)
Fuel quantity (cc/second)
圖10 引擎噴油量3D圖
Computer
Speed Load
Torque/speed
Motor Torque
transducer /encoder
CVT Speed Brake
reducer Torque
transducer /encoder Torque/speed
圖11 CVT性能測量之設備規劃示意圖
進行 CVT 性能測量之實驗,其實驗設備規劃可如圖 11所示,並將其安裝在圖 2 之實驗台上。
使用馬達當動力源帶動 CVT 的驅動輪盤,控制驅動 輪盤的轉速到達所設定的轉速,同時控制磁粉式制動器的 制動扭力當作道路負載,共控制二十種道路負載分別為 8.612、17.224、25.836、…、172.24 N-m,經由最終減速 裝置將道路負載扭力縮小,使作用在 CVT 被動輪盤端的負 載扭力分別為 1、2、3、…、20 N-m 共二十種測試。在控 制被動輪盤端的負載扭力及驅動輪盤的轉速到達穩定時,
測量當時 CVT 驅動輪軸和被動輪軸的扭力和轉速。在不同 的固定負載和轉速下,測量其扭力值和轉速,並取五筆數 據求其平均值。將測量結果表示成圖 12 的 CVT 減速比變 化圖和圖 13 的 CVT 效率圖。
分析 CVT 減速比的測量結果,在輕負載時其減速比 變化曲線會在 3700 到 6200 之間變化,在重負載時減速比 變化曲線會在 4700 到 6700 之間變化,與理論分析吻合
0 2000 4000
6000 8000 10 0 20
1 2 3
Load (N-m) Engine speed (rpm)
Speed ratio
圖12 CVT減速比變化圖
0 2000 4000 6000 8000
10 0 20
0.2 0.4 0.6 0.8 1
Load (N-m) Engine speed (rpm)
Efficiency
圖13 CVT效率圖
0 2000 4000 6000 8000 10000
0 5 10 15 20 25
Time (second)
Speed (rpm) Engine speed
Diven pulley speed
圖14 節氣門全開時CVT的轉速變化
[10]。因負載增加造成扭力凸輪的作動使後離合器軸向推 力增加,所以離心滾子需要更高轉速下的離心力,才可克 服此軸向推力。而測量 CVT 效率則是將輸入軸轉速及扭力 與輸出軸轉速與扭力擷取後,輸出軸轉速乘上輸出扭力除 以輸入軸轉數乘上輸入扭力,此值為當時負載下皮帶傳動 的效率。
測量 CVT 的動態特性,主要是將動力源由馬達改變 成引擎,在最大加速性能測試下,將節氣門全開,測量輸 入軸與輸出軸的轉速,如圖 14 所示。
Servo motor
Position sensor Power screw
Driver pulley
圖15 ECVT的構造圖
Computer
Speed Load
Motor ECVT Clutch Speed Brake
reducer Torque
transducer/
encoder Torque/speed Speed
圖16 離合器作動測試之設備規劃示意圖
五、ECVT功能
ECVT在測量引擎扭力時,由伺服馬達控制減速比,
與最終減速裝置組合,可以作為控制道路負載的微調機 構。ECVT 的構造如圖 15 所示,減速比變化由伺服馬達帶 動減速齒輪組和動力螺桿去推動驅動輪盤作軸向位移,並 由位移計感測驅動輪盤之軸向位移。
六、離合器作動及實驗方法
內擴輪緣離心式離合器主要是藉由輸入軸轉速提 升,使蹄片因離心力作用在外輪盤上產生摩擦力矩,將動 力傳遞至被驅動輪端。圖 16 為離合器作動測試之設備規劃 示意圖。
動力源為馬達,其扭力經由 ECVT 而傳導到離合器輸 入軸。當馬達轉速上升,蹄片之離心力克服彈簧預拉力後,
開始與外輪盤接觸而將扭力傳遞至最終減速裝置。分析離 合器輸入軸轉速與所傳遞的扭力之關係,其公式可表示為:
2 2
1 2
(cos cos ) sin a
mr N kx fbR
T A
ω θ θ
θ
− −
= × (1)
其中,r:蹄片與中心距離;ω:旋轉角速度;m:蹄 片質量;N:蹄片數量;k:彈簧彈性係數;x:彈簧拉伸 距離;A:蹄片作用面積;f:摩擦係數;b:蹄片寬;R:
外輪盤半徑;θ1, θ2:來令片的起始角和終止角。
測量方法是將先制動器鎖住離合器輸出軸,然後慢慢
0 5 10 15 20 25
0 500 1000 1500 2000 2500
Driven pulley input speed (rpm)
Torque (N-m)
Simulation Experimentation
圖17 離合器傳遞扭力與轉速之關係
0 200 400 600 800 1000 1200 1400
0 0.2 0.4 0.6 0.8 1
Time (second)
Speed (rpm)
0 10 20 30 40 50
Torque (N-m)
Speed Torque
圖18 實驗測量之扭力與轉速
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
500 1000 1500 2000
Flywheel speed (rpm)
Frictional torque (N-m)
圖19 實驗測量之摩擦扭力
地將馬達轉速拉高,同時擷取離合器輸出軸的扭力值,並 將不同轉速下的扭力值繪成圖 17。圖中顯示當離合器輸入 軸轉速達到 1300 rpm 時,離合器開始接著而傳遞扭力。比 較電腦程式所模擬的結果與底盤動力計上所測量的結果,
由圖顯示其相當吻合。
七、飛輪慣性測量方法與結果
代表機車與騎乘者重量的慣性飛輪,其測量方法是用馬 達當動力源,動力經過扭力計傳達到慣性飛輪,使飛輪從靜 止加速到某一轉速,圖 18 為實驗測量到作用在飛輪的扭力 和飛輪轉速,圖 19 為飛輪轉動時之所測量的摩擦扭力和轉 速之關係。由於扭力等於慣性矩乘上角加速度,我們可以測 量扭力與轉速的變化,然後計算出加速度和飛輪慣性。
0 5 10 15 20
0 0.2 0.4 0.6 0.8 1
Time (second)
Speed (rad/second)
Simulation Experimentation
圖20 計算與實驗的飛輪轉速
0 2 4 6 8 10
0 1 2 3
Voltage (v)
Torque (N-m)
Output torque
圖21 制動器力矩與電壓關係圖
0 5 10 15 20 25 30 35 40 45 50
0 5000 10000
Engine speed (rpm)
0 5 10 15 20 25 30 35 40 45 50
0 5 10
Engine torque (N-m)
0 5 10 15 20 25 30 35 40 45 50
0 1 2 3
Speed ratio
0 5 10 15 20 25 30 35 40 45 50
0 50 100
Time (second)
Vehicle speed (km/h)
圖22 機車加速性能的實驗結果
計算之方法,利用牛頓第二運動定律計算扭力作用在 慣性飛輪的角加速度,作用扭力為輸入扭力和摩擦扭力。
然後將角加速度對時間積分可以得到角速度,其公式如下 所示:
1 0
(T Tf) I dt
ω=∫ − (2)
其中,ω:角速度;T:扭力;Tf:摩擦扭力;I:飛輪慣 性。
接著使用最佳化演算法進行飛輪慣性的參數辨識。
最佳化演算法使計算程式的角速度與實驗量測得的角 速度的誤差平方為最小,其最佳化後計算與實驗之飛輪 轉速如圖 20 所示,計算所得的飛輪慣性 I = 4.5766 kg-m2。
八、制動器模擬道路負載的實驗方法
使用 NI 公司 6024E 的 DAQ 卡輸出電壓,可轉換 成電流所對應的制動扭力。測試方法由馬達提供一個 固定轉速,同時給與制動器不同的電壓值,測量其相 對應產生的制動力,結果如圖 21 所示。若計算出機車 的道路負載,經過此圖之換算,可以得知所要給與的 電壓值。
九、全車動態性能測試
此機車底盤動力計除了可以測試機車各組件之性能 特性外,還可以進行機車全車動態性能的測試,下列僅就 最常進行的測試說明其結果。
0 2000 4000 6000 8000 10000
0 10 20 30 40 50
Time (second)
Engine speed (rpm)
Simulation Experimentation
圖23 模擬與實驗之引擎轉速
0 10 20 30 40 50 60 70 80 90 100
0 10 20 30 40 50
Time (second)
Vehicle speed (km/h)
Simulation Experimentation
圖24 模擬與實驗之車速
1. 加速性能測試
本節將使用機車引擎底盤動力計進行機車加速性能 測試,並將測試所得的結果和電腦程式所模擬的結果進行 比較。圖 22 是在機車底盤動力計上進行實驗,並使用 DAQ 卡所擷取的引擎轉速、引擎扭力、CVT 減速比及機車車速 的訊號。將程式模擬的引擎轉速和車速,與實驗測量的引 擎轉速和車速分別放在同一張圖內作比較,可得到圖 23 和圖 24。由圖 23 和圖 24 的引擎轉速和車速的模擬與實驗 的比較圖,可以看出其結果相當吻合。證明機車底盤動力 計的功能良好。
2. 自動駕駛性能測試
本節將使用機車底盤動力計進行機車自動駕駛測 試,此測試可用來進行法規要求的污染排放和燃油消耗之 實驗。
使用 NI 公司的 PXI 系統進行即時 (real time) 的測 試,取樣時間選為 20 ms,控制節氣門開度與制動器所產 生的道路負載。
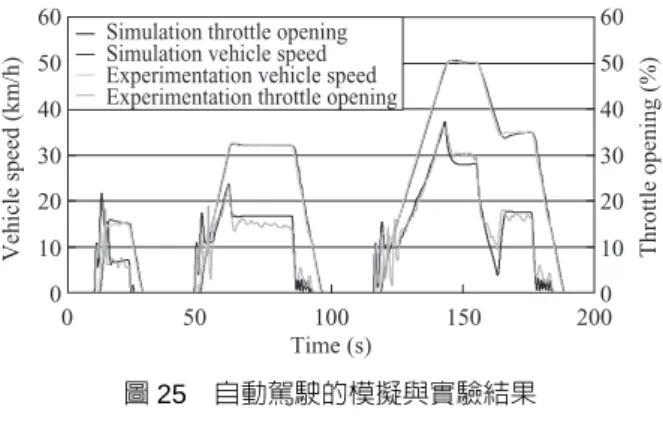
當控制器之參數決定為 Kp = 4.1,Ki = 1.1,Kd = 0.7 時,其機車自動駕駛的模擬與實驗結果如圖 25 所示。比 較圖 25 中的實驗結果和模擬結果,車速都能符合法規要 求,而且節氣門開度趨勢也相同,證明 PID 控制器的設 計法則是正確的,機車的動態數學模式和模擬程式也是 正確的。
0 10 20 30 40 50 60
0 10 20 30 40 50 60
0 50 100 150 200
Time (s)
Vehicle speed (km/h) Throttle opening (%)
Simulation throttle opening Simulation vehicle speed Experimentation vehicle speed Experimentation throttle opening
圖25 自動駕駛的模擬與實驗結果
十、結 論
本文進行機車底盤動力計之設計研究,經過實際測量 驗證,可得到下列結果:
1. 所設計的多功能機車底盤動力計,具有多種機車組件的 測試功能。經實驗測試結果顯示,機車各組件的性能特 性都可在此底盤動力計上測得,且均能與模擬結果吻 合。
2. 所設計之機車底盤動力計還可用於機車全車動態性能 測試,如加速性能測試、燃油消耗測試和污染排放測 試,功能強大。
3. 所設計的機車底盤動力計可取代價格昂貴的引擎動力 計測試機車引擎性能,大幅減少實驗室建置設備的費 用。
參考文獻
1. Plint, M. and Martyr, A., Engine Testing: Theory and Practice, Butterworth Heinemann, Britain, pp. 24-41 (1995).
2. Worley, W. S., “Designing Adjustable-Speed V-Belt Drives for Farm Implements,” SAE Transactions, Vol. 63, pp. 321-332 (1955).
3. Chen, T. F., “An Improved Design of a High Efficiency Rubber V-Belt Continuously Variable Transmission,”
Ph.D Dissertation, Department of Power Mechanical Engineering, National Tsing Hua University, Hsinchu, Taiwan(1999).
4. Tsutsumikoshi, S., Tomita, K., and Ohashi, K.,
“Development of Motorcycle Using Electronic-Controlled Continuously Variable Transmission,” SAE Paper, No.
2002-32-1771 (2002).
5. 林信吾,「無段變速機車性能模擬與測試分析」,碩士 論文,國立清華大學動力機械工程學系,新竹 (1996)。
6. 林秋豐和曾全佑,「機車無段變速系統動態模型之建 立」,中國機械工程學會第十九屆學術研討會,雲林 (2002)。
7. Hong, C. W. and Shio, T. W., “Fuzzy Control Strategy Design for an Autopilot on Automobile Chassis Dynamometer Test Stands,” Mechatronics, Vol. 6, No. 5, pp. 537- 555 (1996).
8. Hong, C. W. and Chen, C. C., “Dynamic Performance Simulation of a Continuously Variable Transmission Motorcycle for Fuzzy Autopilot Design,” Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, Vol. 211, No. 6, pp. 477-490 (1997).
9. Shigley, J. E. and Mischke, C. R., Mechanical Engineer-
ing Design, 6th Edition, McGraw-Hill Book Co. (2001).
10. 陳財富、鄒忠全、吳向宸、高英傑、鄭智元、黃登進、
李如相和莊景富,「機車無段變速器之減速比變化分析 與實驗驗證」,中華民國第十屆車輛工程學術研討會,
台北 (2005)。
2006年 09 月 19 日 收稿 2006年 10 月 05 日 初審 2009年 06 月 20 日 複審 2009年 11 月 30 日 接受

![圖 14 節氣門全開時 CVT 的轉速變化 [10] 。因負載增加造成扭力凸輪的作動使後離合器軸向推 力增加,所以離心滾子需要更高轉速下的離心力,才可克 服此軸向推力。而測量 CVT 效率則是將輸入軸轉速及扭力 與輸出軸轉速與扭力擷取後,輸出軸轉速乘上輸出扭力除 以輸入軸轉數乘上輸入扭力,此值為當時負載下皮帶傳動 的效率。 測量 CVT 的動態特性,主要是將動力源由馬達改變 成引擎,在最大加速性能測試下,將節氣門全開,測量輸 入軸與輸出軸的轉速,如圖 14 所示。](https://thumb-ap.123doks.com/thumbv2/9libinfo/9127496.411678/5.892.466.797.131.914/節氣門全開時轉速變化因負載增加造成扭力凸輪作動使後離合心滾子.webp)