行政院國家科學委員會補助專題研究計畫
成 果 報 告
□期中進度報告
水下載具應用於海底管線檢修之關鍵技術研發-總計畫 (3/3)
計畫類別:□ 個別型計畫 ■ 整合型計畫 計畫編號:NSC96-2221-E-006-327-MY3 執行期間: 96 年 8 月 1 日至 99 年 7 月 31 日 計畫主持人:方銘川 計畫參與人員:徐玉樹 成果報告類型(依經費核定清單規定繳交):□精簡報告 ■完整報告 本成果報告包括以下應繳交之附件: □赴國外出差或研習心得報告一份 □赴大陸地區出差或研習心得報告一份 □出席國際學術會議心得報告及發表之論文各一份 □國際合作研究計畫國外研究報告書一份 處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計畫、列管計畫及下列情 形者外,得立即公開查詢 □涉及專利或其他智慧財產權,□一年□二年後可公開查詢 執行單位:國立成功大學系統及船舶機電工程學系 中 華 民 國 99 年 10 月 19 日水下載具應用於海底管線檢修之關鍵技術研發-總計畫 (3/3)
The key technology and system integration for the multi-mode unmanned underwater vehicle -(3/3) 計畫編號: NSC96-2221-E-006-327-MY3 執行期限:96 年 8 月 1 日 99 年 7 月 31 日 主持人:方銘川 國立成功大學系統及船舶機電工程學系 中文摘要 本計畫為前一階段三年期國科會專題整合研究計畫「抗流型水下遙控載具 (ROV)關鍵性技術開發暨系統整合」之延伸,擬整合應用所自行研發設計製造的 第一艘水下抗流型遙控載具(ROV)配合一特別設計組裝之水面工作載台,使其能 來執行海底管線檢測維修任務,並依此目標來開發研究相關之關鍵整合技術。過 去本團隊所發展之水下抗流型遙控載具,涵蓋流力、結構、控制、電力、推進、 人機介面良好之整合性,已奠定國內海下技術在載具領域的發展。本計畫將作進 一步的水面工作載台與水下遙控載具關鍵技術延伸的研究。 其最終之目的,將 可協助解決國內具有海底管線之各有關單位對於海底管線的檢測維修之相關問 題,例如中油公司長期以來的海底管線施工、監測、維修掩埋之工程問題。整體 上將仍由成大與中山大學同一研發團隊以七個子計畫來分三年來執行: 子計畫一:水面工作載台動態定位系統之數值模擬與操控 子計畫二:水下載具與動態定位平台之電力與訊號傳輸技術研發 子計畫三:水面工作載台動態定位之推進器及驅動控制系統設計與實現 子計畫四: ROV 載具機械手臂設計與輔助操作系統之研發 子計畫五:以視覺輔助水下載具位置與姿態之伺服控制 子計畫六:以複合式定位系統進行水下載具位置估測 子計畫七:緊密固體顆粒在橫向流中之漂移與水下載具監測方法之研究 本計畫所規劃之水面工作載台,並非一具動態定位控制系統之專業船,而是 另外設計一可機動組合的載台,可隨時搭配水下載具作業,來執行海底管線的檢 測維修之相關問題,這將是協助水下作業技術一創新的想法。 關鍵詞: 水下遙控載具,水面工作載台,海底管線,動態定位
英文摘要
The present project is the extension of the previous three-years project entitled “The Development of the Key technique and System Integration for the Anti-current Underwater ROV”.Based on the accumulated research potentials, we plan to apply the self-developed anti-current ROV incorporating with a surface supported vessel under the special design and assembly to execute the mission of the ocean piping line investigation and maintenance. The key technique and system integration development the present project will base on this goal. In the previous project, the ROV developed by the present research team includes the well integrations of fluid mechanics, structural analysis, control technique, power estimation, propulsion design and man-machine interface. The project will make the further system integration of the ROV and the surface supported vessel. The final purpose is to solve the related problems of the underwater ocean piping line investigation and maintenance for the related institutes in Taiwan, for example, the construction, monitoring, maintenance of the ocean piping line at sea bottom for the China Petroleum Corporation. The main job of the present project will be handled by the same research team consisting of the professors in NCKU and NSYSU and the following seven sub-projects are included and will be finished in three years:
Sub-project 1: The numerical simulation and control of the dynamic positioning system for the surface supported vessel
Sub-project 2: The development of the technology of power and signal transmission for the ROV and dynamic positioning bulge
Sub-project 3: Design and Realization of Thrusters and the Driving Control System for Dynamic Positioning of the surface supported vessel
Sub-project 4: Research and Development of ROV-Based Manipulator and Man-Machine Operation Interface
Sub-project 5: Vision-Based Servo Control for Position and Attitude of the Underwater Vehicle
Sub-project 6: Position estimate of an underwater vehicle with a hybrid positioning system Sub-project 7: Drifting of Dense Solid Particles in a Cross Flow and Monitoring Technology
by ROV
The surface supported vessel planned in the present project is not a professional vessel with the dynamic positioning control system. Instead, a portable platform which can be easily assembled will be designed in the project to execute the mission of the ocean piping line investigation and maintenance. This is a creative idea which will be helpful for some operation work of the underwater technology.
目
錄
頁次 中文摘要……… I 英文摘要……… II 目 錄……… III 緣由與目的………. 1 研究方法………... 3 成果說明………. 8 總結………. 100 計畫成果自評………. 104 致謝……….... 104 附錄………. 105緣由與目的 近幾十年來,由於對海洋發展之需求,以及海底資源之探索,水中航行之遙控載 具,在世界先進國家發展得非常快,這種遙控載具是屬於技術密集之高科技的整合產 物。有大到 1800 多噸之載人潛航器,亦有小至幾十公斤之無人遙控之水下載具,不 同之水下載具依其使命任務之不同,差異是非常大的。早期大多是以載人之方式來設 計,而在 1975 年開始由於海洋工程與近海石油發展的需要,無人遙控水下載具有迅 速之發展,由於構造簡單,造價低廉,維修方便,以及無人員生命危險的優點,取代 了許多過去載人載具之任務。水下遙控載具(Remotely Operated Vehicle)[1-4]:它的關 鍵技術[5-8]牽涉廣泛,因此在過去二、三十年來歐美日相繼投入這個產業,累積許多 在深海應用的材料、機電、通訊、控制定位、導航等經驗後奠定另一項工具,自主式 水下無人載具(Autonomous Underwater Vehicle)[9-11] 的研發基礎及能量。國內 AUV 方面,在稍早有台灣大學團隊,針對自主式水下載具做了先期之開發研究[12,13],並 進一步針對仿生型自主式水下載具有進一步之研發[14,15]。國內水中聲學領域則有台 大、成大、海大、中山多位學者針對不同應用有深入之探討。 國內在遙控載具(ROV) 這方面之探討,多為零星之研究,遙控載具(ROV)的開發 是許多先進海洋國家已經累積許多經驗與技術者,我國尚待即起直追。因此本整合型 計畫之研究團隊於前一階段提出一三年期國科會專題研究計畫「抗流型水下遙控載具 (ROV)關鍵性技術開發暨系統整合」,目前對於水下無人載具 ROV 之相關關鍵技術與 系統整合已建立設計開發之能力,而且也成功在小琉球外海操控測試,實海域測試之 ROV 佈放。根據實海域測試結果,目前(95 年 12 月)正著手進行第二代 ROV 之研 發,除了加入慣性導航、環場掃瞄聲納 (Scanning sonar) 等感測器之外,並針對外型、 儀器配置、減重、以及推進效率進行設計變更,預期 96 年初可以進行第二代 ROV 之 實際海域操控測試。本研究團隊所開發之水下無人遙控載具於實際海域測試成功之 後,國內在水下作業上有技術支援需求之相關業界或政府單位(例如八里汙水廠、台 電、海軍、海巡署等等),紛紛探詢水下無人遙控載具進一步應用的可能性。以八里 汙水廠為例,希望藉由本研究團隊所開發之水下無人遙控載具進行海底污水排放管之 觀察與檢測;台電則希望能利用水下無人遙控載具進行水管內部檢測。此外,中油天 然氣海底輸送管線最近因為颱風造成管線底部填方遭海流淘空,也設法進行填補與覆 蓋作業。然而中油天然氣海底輸送管線位於水深七十公尺處,藉由水面投石填方僅能 粗估水下管線位置,而且填石顆粒尺寸小(大石塊撞擊管線容易造成損壞),所以水 面投石沈降過程中容易受海流影響而四處飄散,造成填石大範圍的散佈於海床上,反 而需要填方的管線僅有少數石塊覆蓋。這種藉由水面投石覆蓋水下管線的方法極沒有 效率,不僅需要極大的填方成本,而且也填方之後還必須進一步檢測管線底部淘空部 分是否已完成填方。目前中油檢測管線底部淘空部分是否已完成填方的方法,是利用 測掃聲納進行海床掃瞄,測掃聲納掃瞄雖然可以清楚呈現水下目標物的表面覆蓋狀 態,但要判斷管線底部被淘空的部分卻不容易,所以藉由測掃聲納掃瞄結果來判定管 線填方的完整性一直有很大的爭議。要能夠有效率的進行管線填方覆蓋,其實可以透 過配備機械手臂、定位系統、攝影機、環場掃瞄聲納之水下載具來輔助進行。作業方 式是由水面船延伸一條軟投石導管到水下,利用配備機械手臂與定位系統之水下載具 將投石導管牽引至管線上方附近,再由攝影機與環場掃瞄聲納進行更精確之定位,來 確認投石導管位於管線正上方,水面船搭載之石塊再順著導管而下進行填補覆蓋,如 此將可有效增加作業效率。此外,管線是否完成填補之確認,也可藉由配備攝影機、
遙控載具研發能力的基礎下,以配備機械手臂、攝影機、聲納、以及精確水下定位系 統之水下載具來輔助進行海底管線追蹤與檢測的方法是值得推展的。因此,在本研究 團隊過去三年所建立水下無人遙控載具研發能力的基礎下,本研究團隊接下來的另一 階段三年期研究計畫,即本計畫,將進行水下無人遙控載具應用於海底管線追蹤檢測 所需之關鍵技術研發。要以水下載具來輔助進行海底管線追蹤與檢測,所需之關鍵技 術可以分為水下作業與水面作業兩部分。在水下作業部分,關鍵技術在於水下載具需 要精確定位、路徑追循、以及機械手臂作業能力;在水面作業部分,關鍵技術在於水 面工作船之動態定位。
研究方法: 本總計畫由由七個子計畫分工整合而成,主要之研究方法列略述如下: 子計畫一:水面工作載台動態定位系統之數值模擬與操控 第一年,研究方法如下: 1. 針對水面工作載台遭遇之外力數值需求,先彙整風力與洋流力之相關經驗公式。 2. 針對波浪非線性力,將以近流場之勢流理論並加入時程領域之觀念,並擬利用不規 則波的線性重疊法來運算相關之時程模擬。 3. 以過去發展成功具臍帶之 ROV 運動方程式加入水面工作載台之運動方程式整合與 水下載具成一完整的之偶合運動方程式。 第二年,研究方法如下: 1. 評估側移與前進所需之推進器形式與配置。 2. 擬先採用簡便之控制方法 PD 及 PID 兩種方法來控制定位問題,並同時評估其他設 計方式以便可比較擇優選用,並與子計畫三配合。 3. 利用小尺寸之模型試驗至戶外水池或水庫與 GPS 搭配來驗證可行性。 4. 為了未來可用於海上實測,先行規劃水面工作載台之各種配置,提供配合作海上駁 船試驗計算模擬與其他子計畫作參考。 第三年,研究方法如下: 1. 選定水面工作載台之型式大小(暫以駁船為目標)。 2. 與各子計畫研商必需之周邊設備及其相關資料,計算其安全穩度評估。 3. 與各子計畫配合作海上駁船試驗計算模擬,並作修正控制器。 子計畫二:水下載具與動態定位平台之電力與訊號傳輸技術研發(未獲通過,工作另 作調節,將由子計畫一與子計畫三共同評估) 子計畫三:水面工作載台動態定位之推進器及驅動控制系統設計與實現 第一年,研究方法如下: 1. 自行發展及建立一套屬於大型馬達應用「後充磁」法製作之馬達設計方法,並將此 技術應用於本計畫推進器馬達之設計上。過程中將利用小型化的樣本製作來加以驗 證所發展之設計方法,而與下列第(2)(3)(4)研究項目不同的是,此小型化樣本僅作 為驗證設計方法之用。針對目標工作平台定位系統之規格與需求制訂,則於下列第 (2)(3)(4)項描述之;其設計、製作與組裝測試則分別於第二、三年計畫執行之。 2. 配合子計畫一之目標工作平台動態特性以及波浪、風力、ROV 纜線等外力作用之 建模,在初步推進器配置下(預估三組推進器),可以估算所須推進器推力及功率, 以決定推進器規格。(子計畫一:水面工作載台動態定位系統之數值模擬與操控) 3. 決定推進器規格之後,本計畫之協同研究人員將針對其進行螺槳葉片之分析設計, 以提供符合工作平台定位所需之推力。螺槳設計完成之後,即可透過模擬與分析求 得其操作所需之轉矩與轉速,以提供永磁馬達之設計規格。 4. 將所得之推進器規格,換算成電力需求,包含所需電壓、電流、功率等,將資訊傳
1. 延續第一年所得之設計結果,預估製作大型推進器三組,以供目標工作載台動態定 位推力之所需,在這階段尚未包含推進器轉向所需之伺服機構。推進器製作完成後 將以動力測試平台測量其特性及性能,以作為後續驅動電路設計以及確定電力供應 設計所須之規格。 2. 承 1.,目標大型推進器製作完成後,必須加以設計其驅動電路。由於預期推進器馬 達之特殊結構,將可能允許水流進入馬達內部,以簡化系統及節省水密成本。然而 對於永磁馬達驅動控制所需之磁極感測器而言,並不適於安裝,故有開發「無感測 驅動技術」之必要,以去除感測元件所帶來之裝配問題。而本計畫亦將同時研製具 感測元件之驅動電路,並比較「有感測」與「無感測」驅動兩者之間的性能。由於 大型推進器為重載,對無感測驅動而言是一項考驗。 3. 俟目標大型推進器製作完成後,可完全確定電力需求,以確定總計畫與其他子計畫 有關電力之供應規格。 4. 在此階段,由於各部分次系統或元件尚未完全開發或製作完成,然而在動態定位系 統控制方面之研究仍須積極進行整合。因此,配合子計畫一之建模與控制器設計, 將藉由小型平台,對動態定位系統進行初步系統整合,裝置現成合適之推進器於小 型平台,並實際利用 GPS 以及電羅經進行平台動態定位控制之初步測試。此部分 研究將做為未來目標工作載台動態定位控制之基礎。如前所述,控制器之設計與模 擬主要由子計畫一負責,本計畫在此部分將執行控制程式撰寫與測試,各項硬體與 電路之整合測試,以及控制系統功能測試。 5. 承 4.,由於此階段為初步小型化測試與驗證,因此可以搭配現有之小型伺服馬達與 推進器達成類似 Azimuth 推進器之控制實現。 第三年,研究方法如下: 1. 大型推進器與轉向伺服機構結合加工成為完整之推進器 2. 由於推進器須置放於工作載台各處,彼此間距離甚遠,故不適合以類比方式作訊號 傳輸,以避免訊號之衰減,造成系統控制問題。本計畫擬以「CAN Bus」網路式架 構進行訊號傳輸與控制,以控制本計畫推進器之轉速與轉向。CAN Bus 具有架構 簡單、即時性與高可靠度等優點,有愈來愈多的船舶控制系統採用 CAN Bus 介面, 因此未來所開發之動態定位系統可以與船舶其他控制系統相結合,相當具有彈性。 此外,透過網路式控制可有效降低接線複雜度,並增加系統可靠度。 3. 完成船舶動態定位之完整控制器實現 4. 完成系統整合測試與修正 子計畫四:ROV載具機械手臂設計與輔助操作系統之研發 第一年,研究方法如下: 本研究主旨在設計一套能在中小型的 ROV 上使用的水下機械手臂,而於載體的尺寸 限制,很難將油壓源裝載於小型 ROV 上, 因此比較適合的動力源即是 ROV 本身的電 力系統。採用直流伺服馬達,雖可解決扭矩與體積的問題,但一般市售的編碼器外觀 直徑,遠大於容許直徑(馬達直徑),使水密箱體積過大。在機械臂設計過程中馬達的 選擇,必須從末端開始,致動器的選擇,直接決定了致 動器周圍的機械構件尺寸,間接 的減輕或加重了前級致動器的負載。因此馬達的選擇優 先順序為爪部開閉、爪部旋 轉、下臂驅動、上臂驅動。因此手臂中每一軸的馬達,是以上述步驟不斷循環,直到四 個軸的馬達輸出扭矩達到要求。而馬達輸出扭矩大小的設計步驟如下: 1.初步訂立馬達 輸出扭矩範圍 2.根據馬達,粗略規劃機械結構 3.力學分析,決定前級驅動馬達負載
第二年,研究方法如下: 以採樣機械手臂作為與海底環境的主動式探索裝置,輔以海底移動載台進行海床上運 動來實 現目標物的採集及儲存: 1. 設計條件及水密設計: 由於本研究之設計與其它外掛機構模組間有著幾何及運作上 的相對關係,因此須先了解各模組間的空間限制,才能確保最終系統間不會發生機構干 涉並達成機械手臂工作 空間的設計需求。我們依機構模組之間的關係來討論裝配限 制,並說明採樣機械手臂欲 達成的設計要點,將各種設計條件與需求匯整成表,作 為設計依據。 2.釐清機構模組彼此間的關係: 先探討模組外掛後的運作規劃及潛航器掛載相關機構模 組進行採樣任務的運作規劃。設計採樣機械手臂與樣本儲存機構配置於整體設備的 艏向前端,即框架前方而後方位置則為移動載台驅動元件的配置處。因此須先決定足 夠承載各項機構的載台框架尺寸,再進行詳細的配置空間分配。 3. 防水設計: 通常陸上機具的密封設計旨在防止雨水及灰塵等雜質的進入。: (1)靜態機 件之水密採用的是 O 型環密封法(2)動態機件之水密使用直流馬達作為動力源,輸 出軸呈旋轉運 4. 動機構設計分析與實現: 整體設計順序由末端致動器往基座方向探討,逐步計算所 承受之負載以選用適用的馬達。為使採樣機械手臂搭配其它外掛機構作業時擁有 足夠的靈巧性與工作範圍(workspace),先探討其自由度與各節桿長。我們僅用腕部 的旋轉運動。 最終設定採樣機械手臂所需具備之自由度包含腕部、 肘部、肩部與 腰部的旋轉運動,共四個自由度。採用馬達作為夾爪的動力源控制系統。 第三年, 研究方法如下: 1. 利用 3D 繪圖軟體建置完整的水下機械手臂模型,並透過此模型來觀察其運動狀 態。利用蝸桿蝸輪作為傳動。蝸桿蝸輪安裝採垂直裝配,主要是提供高減速比及高 傳動扭力的特性。動力 輸出平穩,本體具停煞功能,不受重力影響產生速度不一的 情況。蝸桿蝸輪的配合設計 考量中心距、齒數、模數等,必需透過公式推導得到所需參 數及正確的配置方式。 2. 執行高重複性動作,在速度控制上採慢速高扭矩模式,增加其採樣穩定性及使用壽命。 伺服馬達是採用 AllMotion 公司生產的 EZSV10 馬達控制器。提供三種控制模 式,串列命令控制、PWM 控制、類比電壓控制。 3. 為整合各個馬達驅動器並達到系統縮減的目的,我們加入了接線盒的概念,將高功率 的電能轉換器與馬達控制器置入當中,以因應系統較複雜的電路,為達到命令分派的 目的,可採取兩種做法,(1)採用 Texas Instruments 公司所生產的 MSP430 F169 去建 構一個協調控制核心。(2)兩組馬達控 制器分別接收不同型態的命令格式,透過馬達 控制器研判,是否為該命令格式,以驅動 馬達。最終考慮命令分派直接性與系統體 積。 4. 對影像中目標物做三維距離分析,將距離資訊回傳給主控系統,系統直接執行手臂 動作拉進該目標物。 5.透過低深度水槽測試, 達到三代水下機械手臂的動態水密檢測,並觀測其水中運動 模式,能有效幫助實海域佈放規畫。
子計畫五:以視覺輔助水下載具位置與姿態之伺服控制 第一年,研究方法如下: 建立以光流為基礎之初步視覺伺服架構,而鎖定以海底管線依循為階段性目標。即透 過影像分析技術掌握海底管線輪廓與延伸方向,而可使水下遙控載具自動依循管線路 徑行駛,進而紀錄海底管線實際佈放狀況。 第二年,研究方法如下: 以第一年期成果為基礎,發展以光流為基礎之完整視覺伺服技術。使能根據操作者之 指示,在纜繩與洋流等未知且高複雜的外力干擾下,保持恆定的水下載具位置與姿 態,而能達到定點滯留,進而能對於管線特定目標執行較長時間的觀察作業。 第三年,研究方法如下: 海底管線維修作業得依賴子計畫四所研發的機械手臂。而為了使操作者能易於操控機 械手臂進行維修任務,則需有第二攝影機的安置,且此攝影機須具備運動功能,以能 追循機械手臂爪部的位置。因此本年期計畫配合所研發出的水下機械手臂,設計並組 裝具運動功能之第二攝影機系統,並達成攝影機與機械手臂的協同作業。 子計畫六:以複合式定位系統進行水下載具位置估測 第一年,研究方法如下: 1.海床應答器定位 進行海床應答器定位時,水層聲速是非常重要的參數。如果水層聲速剖面為已知, 可以準確計算出收發器與應答器之間的斜距;如果水層聲速為未知,則必須透過其 他方法反算。本研究針對已知水層聲速與未知水層聲速兩個情況,分別建立海床應 答器定位之最佳化演算方法以及探討其求解條件。 2.水層聲速未知條件下之目標函數 水層聲速剖面固然可以經由 CTD 量測來推算,然而斜距與 GPS 資料之量測可能會 持續數小時,不太可能每一個觀測點皆佈放 CTD 來量測聲速剖面,主要是因為 CTD 量測(包含佈放與回收)非常耗時,所以通常是每 2~3 小時才量測一次 CTD 資料 (Kussat et al., 2005)。不過,水層聲速剖面是隨時間與空間變化的,特別是表面水層 變化更劇烈,所以光靠幾次的 CTD 資料其實無法真正代表每筆斜距資料蒐集時的 聲速剖面。所以 Yamada 等人 (2002) 在假設整個水層聲速為均勻一致的條件下,去 估測位於水深 1500 m 的應答器位置,結果發覺在此假設條件之下所估測的應答器 水平位置誤差僅有 18 cm,這個結果顯示了利用平均聲速來達到公分等級的應答器 位置估測是可行的。因此,在無法確實取得水層聲速剖面的情況下,本研究擬嘗試 將水層平均聲速當作參數來進行最佳化數值求解,一方面也可以瞭解最佳化數值估 測之平均聲速與 CTD 量測之平均聲速的差異性。 3.航線規劃 斜距與 GPS 資料的蒐集通常是利用水面船隻來進行,不過船隻蒐集資料的航線對應 答器定位估測的精準度有很重大的影響 (Shevenell, 1984; Shiobara et al., 1997)。一般 進行水下應答器定位的研究都是利用直線航線 (Obana et al., 2000; Yamada et al., 2002) 或者是圓形航線 (Osada et al., 2003; Kussat et al., 2005) 來蒐集斜距與 GPS, 這是有原因的。採行圓形航線最主要的原因是為了要降低水層聲速變化對應答器水 平位置估測的影響,然而為了依循圓形航線,船隻在操控時避免不了劇烈的角速度
估測的準確性。採行直線航線最主要的原因是船隻比較好操控,而且比較不會有劇 烈的角速度運動來降低運動感測器量測的準確性,然而應答器水平位置的估測精度 受聲速剖面變化的影響會較大。除了上述原因之外,並沒有相關研究提及船隻蒐集 資料的航線規劃與限制對應答器定位反算求解的影響,事實上,不適當的船隻航線 可能會造成無法收斂的迭代運算,甚至得到錯誤的求解(非唯一解)。因此,本研 究針對圓形航線與直線航線來探討所收集的斜距與 GPS 資料對估算應答器位置的 影響。 4.已知水層聲速條件下之圓形航線定位求解條件 5.未知水層聲速條件下之圓形航線定位求解條件 6.已知水層聲速剖面條件下之直線航線定位求解條件 7.未知水層聲速剖面條件下之直線航線定位求解條件 第二年,研究方法如下: 1.超短基線定位之感測器對準偏差校正程序 本研究探討 pitch、roll、heading 三個角度的對準偏差對於應答器定位的影響,從而 建立感測器對準偏差校正程序,並發展出偏離航跡誤差校正的程序與方法。 2.對準偏差之定位效應 3.對準偏差之校正演算法 4.偏離航跡誤差修正 第三年,研究方法如下: 1.超短基線系統與載具運動方程式整合定位 2.載具運動方程式 本研究作了以下假設來簡化水下載具運動方程式,以達到即時運算的需求: 動座標原點位於載具重心位置。 載具為外型對稱的均質長方體。 載具為中性浮力。 載具以低速運動,水流為非旋轉流。 3.卡曼濾波估算 超短基線系統之定位資料與載具運動方程式整合,一樣會面臨資料更新率差別很大 的問題。載具運動方程式之狀態資料更新率取決於水下載具命令(Command)更新速 率(約為 5 Hz),但超短基線定位資料約 2 秒才更新一次。因此,本研究利用卡曼 濾波演算融合超短基線定位資料與載具運動方程式進行水下載具狀態估測,以獲得 更可靠的載具定位資料。 (1) 以最佳化數值演算法估算應答器位置。 (2) 船隻蒐集斜距與 GPS 資料的航線規劃,並根據隱函數定理與 Jacobian 行列式 值來判斷定位求解條件。 (3) 透過應答器的位置、斜距、以及 GPS 資料等已知條件來進行垂直聲速剖面反 算。 子計畫七:緊密固體顆粒在橫向流中之漂移與水下載具監測方法之研究 第一年,研究方法如下:
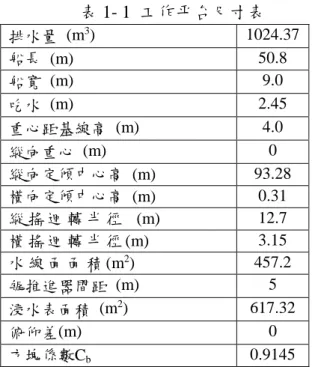
在影像紀錄設備上,主要因為風險考量下而不採用精密且高性能 CCD 攝相 機,取而代之的是數位攝相機,在實驗進行過程中共採用了三種不同類型的攝相 機來觀察並拍攝流場變化,再根據拍攝結果來加以討論與分析 3. 質點測速實驗條件與方法: a) 採用三種不同類型的攝相機來進行拍攝。畫素方面分別設定為123萬、30萬與 38萬。 b) PTV系統皆分別進行三種不同的離光源距離,在此設定約每十公分作為一個不 同層級的距離變化,以便於探討光源距離對於所拍攝流場之計算的影響。 c) 不同的攝相機到皆拍攝三種不同深度的區域,並使用二氧化鈦粉末做為流場可 視化的質點材料。 d) 求模擬真實海下環境,實驗進行中須將實驗室所有燈光關掉僅保留HID光源。 第二年,研究方法如下: 1. 完成砂石拋置與流場交互作用之二相流實驗裝置設計與架構。 2. 在迴流水槽觀測區前後與底部加裝質點攔截網,以確保質點可全數回收避免質點流 入迴流水槽中,進而造成水槽內部受損。 3. 其質點沉降的範圍正上方佈置一淺粉紅色的半透明塑膠布,使拍攝範圍的背景顏色 與上漆玻璃圓球的顏色有明顯色差,以便觀察。 4. 將 HID 光源裝置於迴流水槽的觀測斷面底部中心處,而在光源所照射斷面之法線 方向架設拍攝儀器。 第三年,研究方法如下: 1. 完成多顆砂石拋置與流場交互作用之二相流實驗裝置設計與架構。 2. 在迴流水槽觀測區前後與底部加裝質點攔截網,以確保質點可全數回收避免質點流 入迴流水槽中,進而造成水槽內部受損。 3. 將 PVC 水管伸至水面下,在底部貼上一塑膠布,待玻璃球模型放到管內並靜止於 塑膠布上,隨後將上漆的玻璃球模型從水面下施放。 4. 選擇四個雷諾數來進行實驗 (a) 1300 (b) 3252 (c) 7415 (d) 9886 成果說明 主要成果彙整如下簡述之:(詳細解說請參閱各子計畫之完整報告) 子計畫一: 第一年:成果如下: 非線性力之 RAO 計算,以一工作平台為測試模型,其詳細尺寸如表 1- 1,計算結果 如圖 1- 1 所示,圖中可觀察到非線性力為負值,代表此模擬條件下,非線性力為一阻 力,在λ/L=0.75 時,達到無因次化最大值-1.6,此頻率下工作平台會明顯受到非線性 力影響。
表 1- 1 工作平台尺寸表 0 0.4 0.8 1.2 1.6 2 -2 -1.6 -1.2 -0.8 -0.4 0 圖 1-1 不同波浪波長比(λ/L)下之非線性力(航向 180 度) 為了計算非線性力對工作平台的移動軌跡的影響,同樣以上表 50.8 公尺之工作平 台為模型,模擬 3 種波長船長比。圖 1-2-圖 1-7 可觀察到有、無考慮非線性力的結果 差異非常大,尤其是在短波(λ/L=0.5)下,因非線性力所造成的位移軌跡長度大於 λ/L=1.0 及 0.5 時的軌跡長度,顯示此時的非線性力影響顯著,亦可驗證上圖 RAO 之 結果。圖 1-8 為航向 180 度、λ/L=1.0 包含非線性力計算之船體六度運動時間歷程圖。 排水量 (m3) 1024.37 船長 (m) 50.8 船寬 (m) 9.0 吃水 (m) 2.45 重心距基線高 (m) 4.0 縱向重心 (m) 0 縱向定傾中心高 (m) 93.28 橫向定傾中心高 (m) 0.31 縱 搖 迴 轉 半 徑 (m) 12.7 橫 搖 迴 轉 半 徑 (m) 3.15 水 線 面 面 積 (m2) 457.2 艉推進器間距 (m) 5 浸水表面積 (m2) 617.32 俯仰差(m) 0 方塊係數Cb 0.9145 L B ga FA / 2 2
L
/
-200 -100 0 100 200 Y0(m) -200 -100 0 100 200 X0 (m ) Original
with Nonlinear Force
w a v e d ir e c ti o n 90 deg. 0 deg. 180 deg. 270 deg. 圖 1-2 航向 180 度之船體軌跡, (λ/L=0.5 ,H=0.5m) -200 -100 0 100 200 Y0(m) -200 -100 0 100 200 X0 (m ) Original
with Nonlinear Force
w av e d ir ec ti o n 90 deg. 0 deg. 180 deg. 270 deg. 圖 1-3 航向 0 度之船體軌跡, (λ/L=0.5 ,H=0.5m)
-200 -100 0 100 200 Y0(m) -200 -100 0 100 200 X0 (m ) Original
with Nonlinear Force
w a v e d ir e c ti o n 90 deg. 0 deg. 180 deg. 270 deg. 圖 1-4 航向 180 度之船體軌跡, (λ/L=1.0 ,H=0.5m) -200 -100 0 100 200 Y0(m) -200 -100 0 100 200 X0 (m ) Original
with Nonlinear Force
w a v e d ir ec ti o n 90 deg. 0 deg. 180 deg. 270 deg. 圖 1-5 航向 0 度之船體軌跡, (λ/L=1.0 ,H=0.5m)
-200 -100 0 100 200 Y0(m) -200 -100 0 100 200 X0 (m ) Original
with Nonlinear Force
w a v e d ir ec ti o n 90 deg. 0 deg. 180 deg. 270 deg. 圖 1-6 航向 180 度之船體軌跡, (λ/L=1.5 ,H=0.5m) -200 -100 0 100 200 Y0(m) -200 -100 0 100 200 X0 (m ) Original
with Nonlinear Force
w a v e d ir ec ti o n 90 deg. 0 deg. 180 deg. 270 deg. 圖 1-7 航向 0 度之船體軌跡, (λ/L=1.5 ,H=0.5m)
0 100 200 300 400 (sec.) -1 0 1 (d e g .) ROLL 0 100 200 300 400 (sec.) -0.8 -0.4 0 0.4 0.8 (d e g .) PITCH 0 100 200 300 400 (sec.) 162 180 198 (d e g .) YAW 0 100 200 300 400 (sec.) 0 0.001 0.002 0.003 0.004 (m ) HEAVE 0 100 200 300 400 (sec.) -1 0 1 (m ) SWAY 0 100 200 300 400 (sec.) -0.1 0 0.1 0.2 (m ) SURGE 圖 1-8 船體六度運動(航向 180 度,λ/L=1.0 ,H=0.5m)
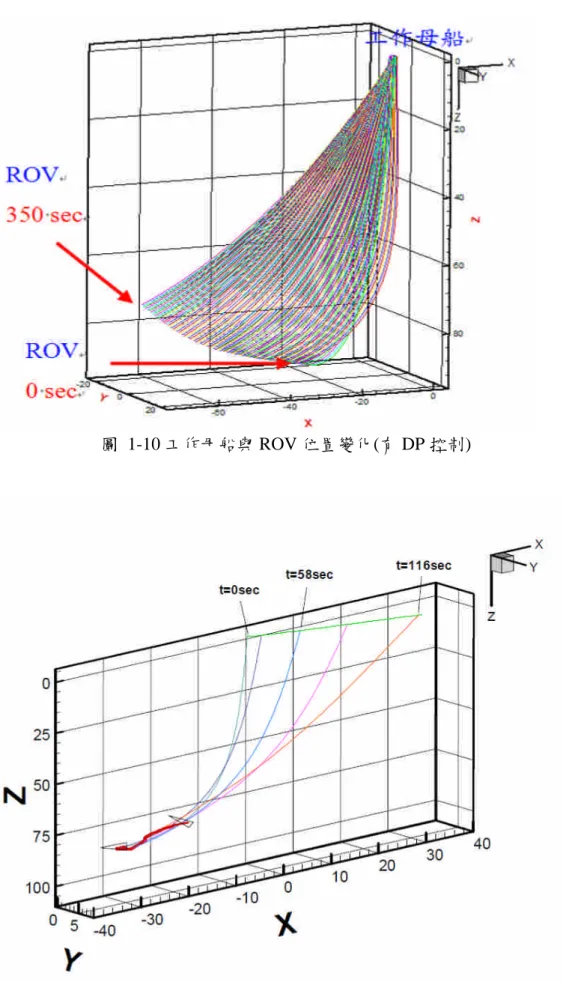
船體運動與 ROV 運動偶合效應 本研究使用計算船型及水下載具之主要項目表如表 1-2、表 1-3。所示從圖 1-9 與圖 1-10 比較,可看出在 DP 控制下,工作母船可保持一定點,使 ROV 在固定工作 範圍內順利作業。 表 1-2 工作母船尺寸表 表 1-3 水下載具(ROV)尺寸表 排水量 (m3) 614.652 船長 (m) 30.8 船寬 (m) 9.0 吃水 (m) 2.45 重心距基線高 (m) 4.0 縱向重心 (m) 0 縱向定傾中心高 (m) 31.85 橫向定傾中心高 (m) 0.3057 縱 搖 迴 轉 半 徑 (m) 7.62 橫 搖 迴 轉 半 徑 (m) 3.15 水 線 面 面 積 (m2) 274.32 艉推進器間距 (m) 5 浸水表面積 (m2) 370.392 俯仰差(m) 0 方塊係數Cb 0.9145 圖 1-9 工作母船與 ROV 位置變化(無 DP 控制) 最大工作深度 (m) 152 全長 (cm) 109.3 高 (cm) 40.6 寬 (cm) 53.3 重量 (kg) 46 最大前進推力(kgf)(1800rpm) 23 最大倒俥推力(kgf)(1800rpm) 10.5 最大垂直推力(kgf)(1800rpm) 10.5
圖 1-12 臍帶電纜之立體軌跡(二級海況,具動態定位系統,工作平台波向角 180 度) 第二年,成果如下:
側移與前進所需之推進器形式與配置
採用簡便之控制方法 PD 來控制定位問題 第二年規劃設計測試船型大小為 50.8 公尺,詳細尺寸如表 1-4、表 1-5,波向 0 度、45 度、90 度及 180 度之水面平台動態定位軌跡計算結果分別為圖 1-14 至圖 1-17 所示。 表 1-4 第二年規劃設計工作平台尺寸表 表 1-5 螺槳尺寸資料 Propeller Diameter (m) 2.8 Propeller Pitch (m) 2.255 -0.5 0.0 0.5 1.0 X0 (m ) PATH SHIP DIRECTION 0sec. 300sec. 500sec. w a v e d ir e c ti o n 排水量 (m3) 1024.37 船長 (m) 50.8 船寬 (m) 9.0 吃水 (m) 2.45 重心距基線高 (m) 4.0 縱向重心 (m) 0 縱向定傾中心高 (m) 93.28 橫向定傾中心高 (m) 0.31 縱 搖 迴 轉 半 徑 (m) 12.7 橫 搖 迴 轉 半 徑 (m) 3.15 水 線 面 面 積 (m2) 457.2 艉推進器間距 (m) 5 浸水表面積 (m2) 617.32 俯仰差(m) 0 方塊係數Cb 0.9145
-2.0 -1.0 0.0 1.0 2.0 Y0(m) -2.0 -1.0 0.0 1.0 2.0 X0 (m ) PATH SHIP DIRECTION 0sec. 300sec. 500sec. w a v e d ir e ct io n 圖 1-15 航向 45 度動態定位平台軌跡 -3.0 -2.0 -1.0 0.0 1.0 2.0 3.0 Y0(m) -3.0 -2.0 -1.0 0.0 1.0 2.0 3.0 X0 (m ) PATH SHIP DIRECTION 0sec. 200sec. 500sec. w av e d ir ec ti o n 圖 1-16 航向 90 度動態定位平台軌跡
-0.75 -0.5 -0.25 0 0.25 0.5 0.75 Y0(m) -0.75 -0.5 -0.25 0 0.25 0.5 0.75 X0 (m ) PATH SHIP DIRECTION 0sec. 200sec. 300sec. 500sec. w a v e d ir ec ti o n 圖 1-17 航向 180 度動態定位平台軌跡
圖 1-18 為在長峰波下,波向 90 度時,Surge、Sway 及 Yaw 方向船體運動在 500 秒內的變化,圖 1-19 為螺槳的推力-扭距(K-J)變化圖。 0 200 400 600 (sec.) -45 0 45 90 135 180 (deg.) YAW 0 200 400 600 (sec.) -0.8 0.0 0.8 (m) SWAY 0 200 400 600 (sec.) -0.2 0 0.2 0.4 0.6 (m) SURGE 0 200 400 600 (sec.) -4000 -2000 0 (kgf) T1 0 200 400 600 (sec.) -4000 -2000 0 2000 4000 (kgf) T2 0 200 400 600 (sec.) -4000 -2000 0 2000 4000 (kgf) T3 圖 1-18 船體水平運動之時間歷程及各推進器之推力變化
0 0.2 0.4 0.6 0.8 1 J(v/nd) 0 0.2 0.4 0.6 0.8 KT & 10*KQ K-J CHART 圖 1-19 K-J 圖 小尺寸之模型試驗至戶外海邊與 GPS 搭配來驗證可行性 同子計畫三進行小尺寸( 3 公尺)模型試驗,實驗情形如圖 1-20、圖 1-21,配合 全球衛星定位系統(GPS)進行定位,目的為量測推進器之相關實驗數據,以驗證模擬 數值與提供未來海上實測之參考。圖 1-22 至圖 1-24 則為此實驗條件下之數值模擬結 果。 圖 1-20 小尺寸模型
圖 1-21 於港邊進行實驗 小尺寸模型數值模擬條件為:測試船型大小約為 3.67 公尺,詳細尺寸如表 1-6。 波向 0 度及 180 度之水面平台動態定位軌跡計算結果分別為以下圖 1-22 至圖 1-24 所示。 表 1-6 小尺寸模型尺寸表 排水量 (m3) 2.738 船長 (m) 3.672 船寬 (m) 1.76 吃水 (m) 0.466 重心距基線高 (m) 0.5 縱向重心 (m) -0.2 縱向定傾中心高 (m) 2.8375 橫向定傾中心高 (m) 0.5549 縱 搖 迴 轉 半 徑 (m) 0.918 橫 搖 迴 轉 半 徑 (m) 0.616 水 線 面 面 積 (m2) 6.2359 艉推進器間距 (m) 0.9 浸水表面積 (m2) 8.6263 俯仰差(m) 0 方塊係數Cb 0.9105
-0.50 -0.25 0.00 0.25 0.50 Y0(m) -0.50 -0.25 0.00 0.25 0.50 X0 (m ) PATH SHIP DIRECTION 0sec. 100sec. 500sec. w av e d ir ec ti o n 圖 1-22 波向 0 度之動態定位平台軌跡圖 -0.5 -0.25 0 0.25 0.5 Y0(m) -0.5 -0.25 0 0.25 0.5 X0 (m ) PATH SHIP DIRECTION 0sec. 100sec. 500sec. w a v e d ir ec ti o n 圖 1-23 波向 180 度之動態定位平台軌跡圖
0 200 400 600 (sec.) 135 180 225 (deg.) YAW 0 200 400 600 (sec.) -0.002 0.000 0.002 0.004 (m) SWAY 0 200 400 600 (sec.) -0.2 -0.1 0 0.1 0.2 (m) SURGE 0 200 400 600 (sec.) -0.04 0 0.04 (kgf) T1 0 200 400 600 (sec.) -0.04 -0.02 0 0.02 0.04 0.06 (kgf) T2 0 200 400 600 (sec.) -0.0001 0 0.0001 0.0002 0.0003 0.0004 (kgf) T3 圖 1-24 船體水平運動之時間歷程及各推進器之推力變化(波向 180 度) 規劃水面工作載台之實測系統 規劃水面工作載台之實測系統,包括駁船大小、推進器安裝、貨櫃屋、柴油發電 機組、吊具、ROV 周邊配件及其他子計畫所需的設備需求。如圖 1-25 圖 1-25 規劃工作駁船及無轂式推進器配置
第三年,成果如下: 實驗載台之選擇:(駁船) 經空間評估後,選擇一駁船為實驗載台之主體,其長、寬、深為 20 m× 6 m× 3m, 排水量約 200 噸,吃水 2.0 公尺,實際的尺寸會依可租賃之駁船而略有差異。以蒐集 之資料看來,100 英呎(33 公尺) 之駁船,亦可做為選擇參考。 貨櫃屋 供人員工作、休息及電子儀器之存放,目前選用 20 呎長的貨櫃屋(6.06 × 2.44 × 2.59 公尺),另可選用 40 呎長的貨櫃屋(12.19 × 2.44 × 2.59 M)。需空調以供人員工作 及休息。 表 1-7 20 呎鐵櫃容量尺寸表 容量(m3 ) 最大裝載量(Kg) 淨重(Kg) 33.2 21,850 2,150 貨櫃尺寸 長 寬 高 內部尺寸(m) 5.9 2.35 2.39 外部尺寸(m) 6.06 2.44 2.59 門徑(m) 2.35 2.27 發電機 供給整個實驗平台之動力來源,選擇發電機之發電功率大小之前,先估算各設備 所需之功率大小: (a)推進器 表 1-8 各推進器所需功率
Propulsor# Propulsor name Max thrust
(kN) Required power (kW) 1 Forward-Thruster 15.7 110 2 Forward-Thruster 15.7 110 3 Side-Thruster 4.9 40 上述推進器功率恰能抵抗最大外力所需,要達到控制的反應的靈敏度,估計需要兩倍 的功率,約(110+110+40)×2=520kW。
(b)水下載具(ROV) 隔離放大器01 隔離放大器05 隔離放大器04 隔離放大器03 隔離放大器02 隔離放大器06 AC 220V(三相) 由船上電力提供 26 + 以下紅色為 +, 黑色為 -260V DC 150V DC 探照燈 3個 110V AC Switch Power 12V 5V G Video 15V G 485 485通訊 + 17 + 18 -1 HI 3 LO 3 Video LO 1 Video HI 8 + 15 -G 推 進 器 命 令 12 V INS + INS -110V AC 110V AC (電燈用) 110V AC PC104 1020 520 300 520 環 場 聲 納 I N S 485通訊 -環場聲納+ 環場聲納-DATA + DATA -AC/AC 穩 壓 器 110V 34 34 35 35 各 三 對 , 共 十 二 條 1 2 3 4 5 6 7 8 Video + Video -G 12V com G 12V com DC12 V To AC 110V DC12 V To DC15 V 24V G G G Com Com 260V DC 150V DC G G 9 -AC 220V To DC 260V 27 + 28 - 29 - 26 27 28 29 AC 220V To DC 150V 30 + 31 + 32 - 33 - 30 31 32 33 14 + 壓 力 計 高 度 計 未 定 DC12 V To DC24 V 24V G 12V G 【COM 2】 磁羅經 12V G G 12V RXD TXD RXD TXD D A T A + D A T A -G 圖 1-26 ROV 之設備圖 表 1-9 ROV 之設備所需功率一覽 設備名稱 使用功率 電壓 電流 用電型態 工業電腦 2W +5V 9.7A DC D/A 卡 1.1W 2.1W +5V +12V 0.22A 0.175A DC 520 推進器(兩顆) 300W +150V 2A DC 300 推進器(一顆) 300W +150V 2A DC 1020 推進器(三顆) 1586W +260V 6.1A DC Transponder 自備電源 INS(定位) 自備電源
磁羅經 4.2W +12V 0.35A DC 壓力計 0.36W +12V 0.03A DC 通訊、控制器材 12W +12V 1A DC 攝影機 6W +15V 0.4A DC 探照燈 (三顆) 100W 110V 0.91A AC 聲納 5W +24V 0.21A DC 整體使用時間 3 小時 根據以上資料估算,ROV 設備所需功率約 5,789W,故所需總功率選定為 6kW。 (c)電腦設備,包含 ROV 控制器,訊號處理器,LCD 螢幕,約需要 1kW (d)吊具 負責起吊 ROV,作業時有些許的額外負載,估計吊車吊臂長度約 2 公尺,起吊能力 約 1 噸重,功率約 2kW。由於非頻繁的起吊作業要求,亦可採手搖式吊具之設計,則 無功率之需要,就可省掉電力需求。但兩者均須注意固定方式。 (e)空調 坪數約一個貨櫃屋的大小 4.47 坪(6.06M×2.44M×0.3025),考慮日曬條件(在海上接近 於頂樓的狀況)及坪數,需 8000~10000BTU。估計約需要 3kW。 表 1-10 工作載台所需功率一覽表 項目 功率 (a)推進器 520kW (b)水下載具(ROV) 6kW (c)電腦設備 1kW (d) )簡易吊具(採用油壓電動式) 2kW (e)空調 3kW 總電力 532kW 以上(a)至(e)設備所需電壓有 220V 與 110V 兩種,故需選定匹配之變壓器。綜合以上 需求選定 550kW 以上之柴油發電機組(建議兩台 275kW 以上並聯組合)。 柴油消耗及儲存 以定位作業實驗時間估計,550kW 以 85%運轉功率運行 6 小時,1kW 一小時約
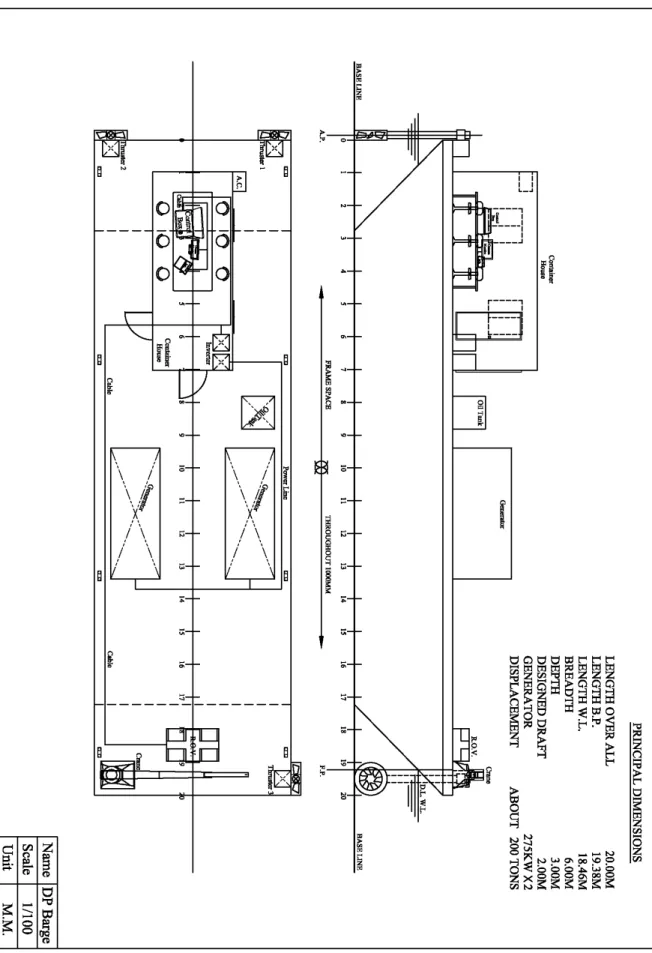
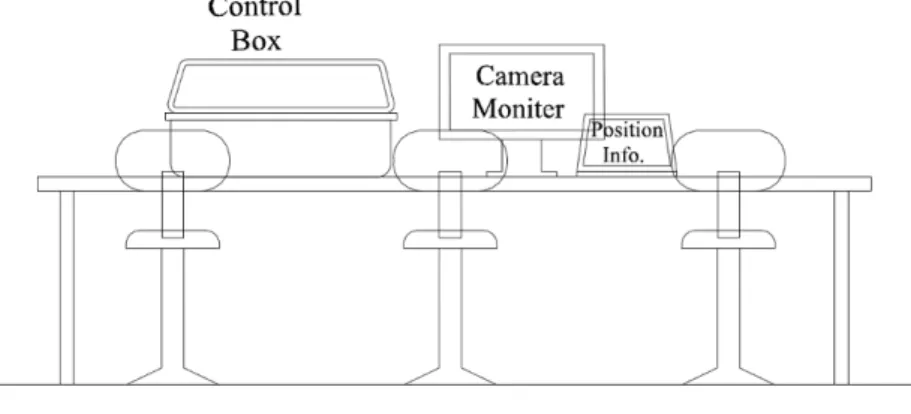
表 1-11 海上測試所需主要經費估算 項目 價格 駁船(買斷) 200 萬 駁船(租用) 1 萬/日 20 呎貨櫃屋 7 萬 發電機(兩部) 260 萬 推進器(三部) 150 萬 空調 2 萬 輕柴油 750 公升 2 萬 儲油櫃 1 萬 油壓電動式吊具(負載約 1 噸) 85 萬 可拆卸活動式手動吊具(負載 約 1 噸) 25 萬 具有執照之船員、技術人員薪 資 0.5 萬/人日 其他費用:(含運送、施工、拖 船、油料、桌椅、儲水櫃、等) 10 萬 配置水面工作載台之一般佈置圖與並計算其安全穩度評估 水面工作載台一般佈置圖配置 圖 1-27 為以實際駁船作為水面工作載台之一般佈置圖之設計。圖 1-28 與圖 1-29 為 ROV 操縱台佈置圖之正視圖與上視圖
圖 1-28 ROV 操縱台佈置圖 圖 1-29 ROV 操縱台佈置圖 安全穩度評估 根據上述水面工作載台之一般佈置圖及載台上各項裝備物件之重量位置與重 心,將水面工作載台的設計諸元進行靜水性能(HYDROSTATIC)與安全穩度評估分 析,安全穩度曲線表示如下:
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0 10 20 30 40 50 60 HEEL ANGLE(degrees) G Z (m )/ D Y N A M IC A L S T A B .( m -r a d ) GZ DYNAMICAL STAB. 圖 1-30 穩度曲線(STABILITY CURVE) 上圖表顯示本研究之水面工作載台設計符合安全穩度,可達到一般海上作業之要求。 海上實體測試控制器之可行性 由於子計畫二及實測經費被刪除,其他經費亦被縮減近 1/3,故重新評估後,採 縮小尺寸及紙上規劃設計模擬方式處理。並以沿海附近,以小尺度之模型試驗(子計 畫三)為主。 而第三年規劃設計海上實體測試船型大小為 20 公尺,詳細尺寸如表 1-12,模擬 以 4 種不同波向條件:0 度、45 度、90 度及 180 度,模擬海況參考 ITTC 波譜:長峰 波、有義波高 0.3 公尺、平均週期 2.4 秒,風速及洋流速度分別為 4.37 公尺/秒、0.3 公尺/秒。波浪、風及洋流方向假設為同方向。模擬中使用的增益值(gain)是採取試誤 法(trial and error method)決定,分別為 K1=-35, K2=-250, K3=-50, K4=-35, K5=-250,增 益值可能不是最佳化(optimal)所求得,但仍可達到動態定位的目的。螺槳直徑及螺槳 螺距分別為 1.70 公尺、1.34 公尺。
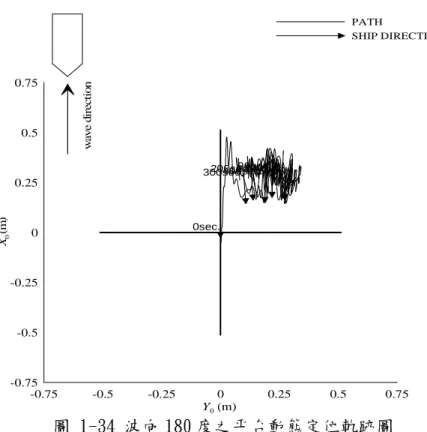
波向 0 度、45 度、90 度及 180 度之水面平台動態定位軌跡計算結果分別為以下 圖 1-31 至圖 1-35 所示 表 1--12 第三年規劃設計模擬工作平台尺寸表 排水量 (m3) 199.004 船長 (m) 20.0 船寬 (m) 6.0 吃水 (m) 2.0 重心距基線高 (m) 1.95 縱向重心 (m) 0 縱向定傾中心高 (m) 16.42 橫向定傾中心高 (m) 0.82 縱 搖 迴 轉 半 徑 (m) 5.0 橫 搖 迴 轉 半 徑 (m) 2.1 水 線 面 面 積 (m2) 114.46 艉推進器間距 (m) 5 浸水表面積 (m2) 180.79 俯仰差(m) 0 方塊係數Cb 0.8292 -0.50 -0.25 0.00 0.25 0.50 Y0(m) -0.50 -0.25 0.00 0.25 0.50 X0 (m ) PATH SHIP DIRECTION 0sec. 100sec.500sec. w av e d ir ec ti o n 圖 1-31 波向 0 度之平台動態定位軌跡圖
-2.0 -1.0 0.0 1.0 2.0 Y0(m) -2.0 -1.0 0.0 1.0 2.0 X0 (m ) PATH SHIP DIRECTION 0sec. 100sec.500sec. w av e d ir ec ti o n 圖 1-32 波向 45 度之平台動態定位軌跡圖 -3.0 -2.0 -1.0 0.0 1.0 2.0 3.0 X0 (m ) PATH SHIP DIRECTION 0sec. 100sec. 200sec. 500sec. w av e d ir ec ti o n
-0.75 -0.5 -0.25 0 0.25 0.5 0.75 Y0(m) -0.75 -0.5 -0.25 0 0.25 0.5 0.75 X0 (m ) PATH SHIP DIRECTION 0sec. 99sec. 200sec. 300sec.400sec.500sec.
w av e d ir ec ti o n 圖 1-34 波向 180 度之平台動態定位軌跡圖
圖 1-35 為在長峰波下,波向 90 度時,Surge、Sway 及 Yaw 方向船體運動在 500 秒內的變化,T1、T2 及 T3則分別代表兩顆艉推進器與側推進器之推力變化。在本模 擬中,艉推進器及側推進器約分別需要產生 800 公斤、160 公斤的推力,相當於是 55kW 及 15kW 的功率需求。 0 200 400 600 (sec.) -45 0 45 90 135 180 (deg.) YAW 0 200 400 600 (sec.) -0.8 -0.4 0.0 0.4 0.8 (m) SWAY 0 200 400 600 (sec.) 0 1 2 (m) SURGE 0 200 400 600 (sec.) -400 0 400 800 1200 (kgf) T1 0 200 400 600 (sec.) -1200 -800 -400 0 400 800 1200 (kgf) T2 0 200 400 600 (sec.) 0 80 160 (kgf) T3 圖 1-35 船體水平運動之時間歷程及各推進器之推力變化(波向 90 度) 子計畫三: 第一年,成果如下: 一、 後充磁流程與分析: 馬達之槽極配選用 表 3- 1 馬達槽極比組合 1.5 3 槽數 極數 槽數 極數
9 6 18 6 12 8 24 8 15 10 30 10 4.5 6 槽數 極數 槽數 極數 9 2 12 2 18 4 24 4 27 6 36 6 36 8 48 8 1.2 繞組設計與繞線因數 馬達繞組設計種類繁多,因此為了設計方便,本計劃採用由 Hanselman[2]所提出 的繞組設計方法,此方法是利用不同相位疊加的概念,將不同相位波形疊加之後,即 成為反電動勢常數波形,在兩波型之間與繞組所在的槽數位置有相對關係,最後,將 此關係式在與繞線因子結合計算即可,此方法為一快速且方便之設計方法 1.3 充磁時轉子角度計算法則 圖 3-1 可用來解釋轉子角度與繞組線圈間之關係,再由此相對關係推導出轉子充 磁固定角度之計算法則。 圖 3-1 兩相轉子角度與線圈相對位置 二、 平台作用力 2.2 實驗平台推力 計畫中動態定位平台需有一實驗目標進行設計,由於實驗上經費上之限制,因此 規畫以實驗室現有小型平台做為動態實驗對象,小型平台如圖 3-2
圖 3-2 小型平台之外觀 表 3-2 小型動態定位平台之尺寸 成功三號 船舶主要尺寸 計畫總噸數 (Ton) 長寬比 寬深比 長寬深相乘積 (m^3) 預估推進馬力數 (Hp) 3.69 2.55 1.88 3.69 6 表 3-3 小型平台之規格 The Specification of Barge
Displacement (m3) 2.5709
Length (m) 3.672
Breadth (m) 1.76
Draft (m) 0.466
Center of Gravity above Baseline (m) 0.3
LCG (m) 0
Longitudinal GM (m) 2.5946
Transverse GM (m) 0.5549
Radi us o f G yratio n for Pi tch (m) 0.918
Radi us o f G yratio n for R oll (m) 0.616
Waterpl ane Area(m2) 6.4627
Length between stern thrusters (m) 0.9
Wetted Surface (m2) 8.6263
Trim (m) 0
Platform force chart y = -68.6x2+ 81.34x + 7E-15 y = 686x2- 14.7x + 6E-14 0 20 40 60 80 100 120 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 velocity (m/s) fo rc e (N ) surge N sway N 圖 3-3 小型平台不同方向推力對速度測量結果 三、 螺槳分析與實測 經設計額定操作規格如表 3-4,推進器設計規格如表 3-5。 表 3-4 額定操作規格 額定船速 5 Knot 系列螺槳 B4. 70- Chart 設計效率 47 % 輸出馬力 10 Hp 額定轉速 1078 r.p.m. 葉片直徑 44 cm 螺距 29.92 cm 單顆推進器推力 2923 N 表 3-5 推進器設計規格 額定輸入電壓 310 V 額定輸出轉矩 143 N-m 額定輸出轉速 1078 r.p.m 額定輸出功率 21.6 Hp 定子直徑
軸徑 80 mm 有效軸長 515 mm 推進器採用環趨式葉片設計如圖 3-4 所示 圖 3-4 環趨式葉片示意圖 3.1 螺槳特性實測 設計之推進器螺槳需進行實驗以驗證其設計
台車
台車 (船) 行進方向 螺槳推力 方向 F>0 F<0 螺槳 動力計(F) 圖 3-5 螺槳特性實驗y = -1.8796x + 1.0939 y = 0.209x + 0.8267 y = 2.8899x3- 6.0371x2+ 2.5785x - 0.0086 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 K t, K q, E ff J (v/nD) 螺槳單獨性能曲線 Kt 10Kq Eff 線性(Kt) 線性(10Kq) 多項式(Eff) 圖 3-6 自製推進器之螺槳特性曲線 四、推進器規格制定: 因此推進器設計流程可整理如圖 3-7,經此流程設計完成之推進器細部規格如表 3-6,充磁流程如表 3-7,充磁方式以低電壓開始充磁,於充磁電流接近設計充磁電流 時,即充磁完成。 圖 3-7 推進器設計流程
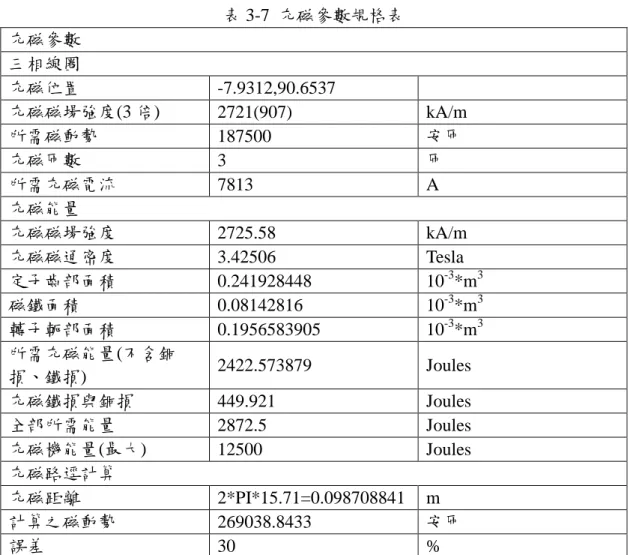
表 3-6 螺槳與推進器規格 葉片規格 葉片半徑 150 mm 葉片所需轉矩 12 N-m 葉片所需轉速 2000 r.p.m 所需船速 2.06 m/s 產生推力 266 N 推進器尺寸 輸入電壓 48 V 輸出額定轉矩 12 N-m 輸出額定轉速 2000 r.p.m 預估電流 64.3 A 銅損(5%) 154.32 W 定子外徑 247 mm 轉子外徑 190 mm 有效軸長 40 mm 氣隙 2 mm 相數、槽與極數 3 相 16 極 24 槽 磁鐵規格 磁鐵開口角 160 (機械角 20 度) 度 磁鐵規格 B=1.19 Tesla H=907 kA/m 磁鐵厚度 4 mm 氣隙磁通密度(設計) 0.7288 Tesla 氣隙磁通密度(模擬) 0.76 計算參數 磁鐵面積 1460.840584 mm2 氣隙面積 1507.964474 mm2 卡特係數 1.02106264 氣隙磁導 0.9279372 H*10-6 磁鐵磁導 0.479156 H*10-6 漏磁導 0.01518 H*10-6 集中因子 0.96875 電氣規格 繞線因子 1 匝數 3 匝 槽面積 152.2 mm2 銅線直徑(14 條並聯) 0.8 (AWG21) mm 佔槽率 35.322 % Kt(模擬) 0.1386 N-m/A
表 3-7 充磁參數規格表 充磁參數 三相線圈 充磁位置 -7.9312,90.6537 充磁磁場強度(3 倍) 2721(907) kA/m 所需磁動勢 187500 安匝 充磁匝數 3 匝 所需充磁電流 7813 A 充磁能量 充磁磁場強度 2725.58 kA/m 充磁磁通密度 3.42506 Tesla 定子齒部面積 0.241928448 10-3*m3 磁鐵面積 0.08142816 10-3*m3 轉子軛部面積 0.1956583905 10-3*m3 所需充磁能量(不含銅 損、鐵損) 2422.573879 Joules 充磁鐵損與銅損 449.921 Joules 全部所需能量 2872.5 Joules 充磁機能量(最大) 12500 Joules 充磁路逕計算 充磁距離 2*PI*15.71=0.098708841 m 計算之磁動勢 269038.8433 安匝 誤差 30 %
第二年,成果進度如下:
一、推進器製作
圖 3-8 後充磁馬達之充磁架構
(a) 轉矩感測計 (b) 示波器 圖 3-10 實驗量測設備
實驗與量測結果
充磁實驗
圖 3-12 充磁機外觀圖 表 3-8 充磁實驗之電壓、電流 兩相並聯 三相並聯 (1) (1) 充磁電壓(V) 單相充磁電流(A) 充磁電壓(V) 單相充磁電流(A) 1150 900 1300 867 (2) (2) 1150 900 1300 867 表 3-9 後充磁馬達之各相電壓與反電動勢常數(1) 兩相並聯 三相並聯 轉速(r.p.m) 1000 1000 U 相(V) 23.68 23.27 V 相(V) 23.77 23.24 W 相(V) 23.38 23.03 e K (Vsrad) 0.225 0.221
(a) 兩相並聯 (b) 三相並聯圖 圖 3-13 後充磁馬達各相反電動勢波形(1) 表 3-10 後充磁馬達之相電壓與反電動勢常數(2) 兩相並聯 單相充磁電流(A) 1100 轉速(r.p.m) 1000 U 相(V) 24.43 V 相(V) 24.26 W 相(V) 23.92 e K (
rad
s
V
) 0.23 三相並聯 單相充磁電流(A) 1334 轉速(r.p.m) 1000 U 相(V) 23.59 V 相(V) 24.35 W 相(V) 24.06 e K (rad
s
V
) 0.229(a) 兩相並聯
(b) 三相並聯
圖 3-14 充磁一次之馬達各相反電動勢波形
圖 3-16 前充磁馬達之各相反電動勢波形(2) 表 3-11 四種接線方式之充磁比較 接線方式 兩相串聯 兩相並聯 實驗電壓(V) 1050 1050 實驗電流(A) 400 800 電流比 1 2 接線方式 兩相並聯與一相串聯 三相並聯 實驗電壓(V) 1300 1300 實驗電流(A) 700 867 電流比 1 1.24 二、推進器測試結果 圖 3-17 電動推進器
表 3-12 推進器規格 8 額定功率 2.1 K(W) 額定轉速 2500(r.p.m) 額定轉矩 8(Nt-m) 最大耐壓 48(V) 馬達特性線 y = -0.1263x + 33.782 0 1 2 3 4 5 6 220 230 240 250 260 270 轉速(rad/s) 轉 矩 (N /m ) 轉矩(N/m) 線性 (轉矩(N/m)) 圖 3-18 馬達特性量測結果 負載特性線 y = 0.0003x2- 0.0018x 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0 10 20 30 40 50 轉速(rad/s) 轉 矩 (N m ) 圖 3-19 推進器負載特性量測結果
負載操作點 0 5 10 15 20 25 30 35 40 0 50 100 150 200 250 轉速(rad/s) 轉 矩 (N m ) 負載 馬達 圖 3-20 推進器負載操作點 加載測試 圖 3-21 加載測試於動力測試平台
T-N Curve
0 1 2 3 4 5 6 21 22 23 24 25 26N
T
T - N C u r v e 圖 3-22 馬達特性曲線 實機測試 水下實驗結果 圖 3-23 電動推進器水中加載測試0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 0.0 68 0.094 0 .11 2 0.198 0.282 0.3 56 流 速 ( m / s ) 轉 矩 T ( N m ) 圖 3-24 流速與轉矩之關係圖 圖 3-25 後充磁推進器 600 RPM 測試結果 圖 3-26 後充磁推進器 900 RPM 測試結果
三、無感驅動器之設計與測試 無感測器驅動系統架構 圖 3-27 無感測器驅動系統架構之方塊圖 Van HEA HEB HEC AND Gate NOT Gate Vref+ Vref -Part Ⅱ PartⅠ Part Ⅲ Vbn Vcn 圖 3-28 估測電路硬體架構方塊圖
四、小型動態定位平台之建置 4.1 推進器製作 圖 3-29 轉向機構與伺服機 主推進器 側推進器 船體 電器設備 x y . z 圖 3-30 船隻動力分配與修正方向 Ref Input Ref Input 船 船 cRIO cRIO -(電羅經) 方位 (DGPS) 位置 推進器 推進器 伺服馬達 伺服馬達 + + 圖 3-31 動態定位控制架構
Po r t th r u s te r S ta r b o a r d th r u s te r S id e th r u s te r C o m p a s s & D G PS 圖 3-32 動態定位平台用實驗船模 表 3-13 船模平台規格比較表
case I. case II.
Exp. Ship LOA = 4.5 m
B = 1.5 m LOA = 1.8 m B = 0.3 m Displacement 900 kg 40 kg Thruster 2kW 50W Max. RPM 300 rpm 800 rpm Experimental
Environment Harbor University campus
48V Bat. Port Driver Side Th. Driver Star. Driver Port Servo Driver Star. Servo Driver Controller 5V & 24V DGPS compass String String pulley pulley 12V Bat. RPM si. RPM port RPM st.
表 3-14 推進器規格 推進器 轉向馬達 BLDC 馬達 驅動器 AC 伺服馬達 驅動器 廠商/型號 善工 善工 EML8-750 信濃 AC servo HO 規格 2.25kW output 48V input 0.75kW output 48V input 五、小型平台實測 400.0 0.0 50.0 100.0 150.0 200.0 250.0 300.0 350.0 Time 70.0 0.0 10.0 20.0 30.0 40.0 50.0 60.0 Angular Graph 圖 3-34 航向角對時間圖 32.5 0.0 2.5 5.0 7.5 10.0 12.5 15.0 17.5 20.0 22.5 25.0 27.5 30.0 Longitude distance (m) 12.5 0.0 2.5 5.0 7.5 10.0 DP path 圖 3-35 路徑對時間圖
4.0 -4.0 -3.0 -2.0 -1.0 0.0 1.0 2.0 3.0 Time 70.0 0.0 10.0 20.0 30.0 40.0 50.0 60.0 Port thruster Starboard thruster Side thruster XY Graph 圖 3-36 轉速命令對時間圖 第三年,成果進度如下: 圖 3-37 推進器製作過程分解圖
馬達極數 16 額定功率 1.73 (KW) 額定轉矩 12(N-m) 額定轉速 1380(RPM) 額定電流 64.3(A) 操作電壓 DC 48(V) 無載轉速 1700(RPM) 相電阻 60.48(mΩ) 相電感 85.5(μH) 圖 3-38 推進器全貌圖 圖 3-39 操作於無載,轉速為 1700RPM 之波形
圖 3-40 操作於 7.43N-m,轉速為 1459RPM 之波形
0 10 20 30 40 50 60 0 10 20 30 40 50 60 70 80 v=0.02 m/s v=0.2 m/s v=0.4 m/s N(rad/s) T(N) 圖 3-42 自製推進器推力圖 0 10 20 30 40 50 60 70 80 0 500 1000 1500 2000 T (N m ) rpm 推進器匹配圖 T(N) v=0.02 m/s v=0.2 m/s v=0.4 m/s 圖 3-43 自製推進器匹配圖
圖 3-44 自製推進器所使用之伺服馬達
二、CAN 架構與 DP 之應用 CAN bus 架構 MCU CAN controller Transceiver 120 Ω 120 Ω MCU CAN controller Transceiver MCU CAN controller Transceiver MCU CAN controller Transceiver converter node port thruster node starboard thruster node side thruster node 圖 3-46 本計畫之 CAN 節點架構 圖 3-47 具 CAN 介面的驅動與推進單元節點
三、船舶動態定位控制器
圖 3-48 DGPS 測試地點
-73.3
-73.5 -73.4
Longitute to Position Distance (m)
23.0
22.6 22.7 22.8 22.9
0.6 -2.2 -2.0 -1.8 -1.6 -1.4 -1.2 -1.0 -0.8 -0.6 -0.4 -0.2 0.0 0.2 0.4
Longitute to Position Distance (m)
5.5 -0.5 0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 圖 3-50 於 2X5 公尺內進行 DDGPS 路徑測試結果 600.0 -1200.0 -1000.0 -800.0 -600.0 -400.0 -200.0 0.0 200.0 400.0 Time (0.1s) 425 0 25 50 75 100 125 150 175 200 225 250 275 300 325 350 375 400 Plot 1 Plot 0 Record Plot 0 Port Plot 1 RPM port With rpm control Without rpm control 圖 3-51 單組推進器之轉速控制測試結果
600.0 -1000.0 -900.0 -800.0 -700.0 -600.0 -500.0 -400.0 -300.0 -200.0 -100.0 0.0 100.0 200.0 300.0 400.0 500.0 Time (0.1s) 300 0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 Plot 0, 1, 2 rpm command of port, starboard, side Plot 3, 4, 5 rpm feedback of port, starboard, side
With speed control
Without speed control
T h ru st er ro ta ti o n sp ee d (r p m ) Time (0.1s) com. St. (RPM) com. Si. (RPM) RPM P. (RPM) RPM St. (RPM) RPM Si. (RPM) com. P. (RPM) 圖 3-52 三組推進器之轉速控制測試結果 四、系統整合與海上實測 圖 3-53 於光復校區成功湖進行之實測
圖 3-54 定位系統操作頁面圖 0.6 -1.5 -1.4 -1.3 -1.2 -1.1 -1.0 -0.9 -0.8 -0.7 -0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0.0 0.1 0.2 0.3 0.4 0.5
Longitute to Position Distance (m)
4.8 3.9 4.0 4.1 4.2 4.3 4.4 4.5 4.6 4.7 DP Graph
-10.0 -38.0 -36.0 -34.0 -32.0 -30.0 -28.0 -26.0 -24.0 -22.0 -20.0 -18.0 -16.0 -14.0 -12.0
Longitute to Position Distance (m)
16.0 -8.0 -6.0 -4.0 -2.0 0.0 2.0 4.0 6.0 8.0 10.0 12.0 14.0 L at it u d e to p o si ti o n in g p o in t d is ta n ce (m )
Longitude to positioning point distance (m) 圖 3-56 小型平台之定位路徑結果(一) 700.0 -700.0 -600.0 -500.0 -400.0 -300.0 -200.0 -100.0 0.0 100.0 200.0 300.0 400.0 500.0 600.0 Time (0.1s) 1500 0 250 500 750 1000 1250 T h ru st er ro ta ti o n sp ee d (r p m ) Time (0.1s) com. St. (RPM) com. Si. (RPM) com. P. (RPM) 圖 3-57 小型平台之定位命令(一)
10.5 4.5 5.0 5.5 6.0 6.5 7.0 7.5 8.0 8.5 9.0 9.5 10.0
Longitute to Position Distance (m)
6.5 -3.5 -3.0 -2.5 -2.0 -1.5 -1.0 -0.5 0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 5.5 6.0 L at it u d e to p o si ti o n in g p o in t d is ta n ce (m )
Longitude to positioning point distance (m)
圖 3-58 小型平台之定位路徑結果(二) 400.0 -400.0 -350.0 -300.0 -250.0 -200.0 -150.0 -100.0 -50.0 0.0 50.0 100.0 150.0 200.0 250.0 300.0 350.0 Time (0.1s) 650 0 50 100 150 200 250 300 350 400 450 500 550 600 T h ru st er ro ta ti o n sp ee d (r p m ) Time (0.1s) com. St. (RPM) com. Si. (RPM) com. P. (RPM) 圖 3-59 小型平台之定位命令(二)
1.8 -1.0 -0.8 -0.6 -0.4 -0.2 0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6
Longitute to Position Distance (m)
1.7 -0.4 -0.3 -0.2 -0.1 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6 圖 3-60 船模定位路徑結果 1400.0 -800.0 -600.0 -400.0 -200.0 0.0 200.0 400.0 600.0 800.0 1000.0 1200.0 Time (0.1s) 800 0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 com. St. (RPM) com. Si. (RPM) RPM P. (RPM) RPM St. (RPM) RPM Si. (RPM) com. P. (RPM) Record 圖 3-61 船模定位時各推進器轉速命令輸出
0.1
-0.1 0.0
Longitute to Position Distance (m)
0.6 0.0 0.1 0.2 0.3 0.4 0.5 圖 3-62 無外界干擾之原點路徑結果 -0.3 -2.0 -1.9 -1.8 -1.7 -1.6 -1.5 -1.4 -1.3 -1.2 -1.1 -1.0 -0.9 -0.8 -0.7 -0.6 -0.5 -0.4
Longitute to Position Distance (m)
0.2 -0.2 -0.1 0.0 0.1 圖 3-63 無定位功能且被風影響之路徑結果 子計畫四: 第一年, 成果如下: 在本年度計畫期間,以 DC 伺服馬達為動力源,製作一個三個自由度的機器手 臂,並 用 PC 的搖桿作為操縱器開發一個簡單的人機介面。設計重點在於輕量化,浮力 力 矩平衡與傳動軸之水密性。夾爪以平行機構配合直流馬達帶動線性滑塊達成開啟及閉 合的動作,可夾負重約 2 公斤。同時在本次原型機的試做過程發現,單用一個軸承來 支 撐傳動軸,結構體剛性不足,轉向齒輪的間隙大,這些缺點將會在下一年度的設計 中改善。
圖4-3 平行式機械夾爪
圖4-5 機械手臂工作空間 圖4-6 機械手臂實體照片 第二年,成果如下: 表4-1 配置空間尺寸 機構模組名稱 配置空間 採樣機械手臂 550mm×160mm×200mm 樣本儲存機構 770mm×440mm×200mm 海底移動載台 500mm×600mm×200mm
圖4-7 無人遙控載具採樣系統運作流程圖
圖4-8 無人遙控載具採樣系統空間配置圖
圖4-9 軸封裝配要點
圖4-11 本計畫機械手臂自由度配置示意圖
圖4-12 夾爪構造示意圖
圖4-14 控制介面程式
圖4-15 機械手臂成品 第三年,成果如下:
圖4-17 三代水下機械手臂成品
圖4-23 利用機械手臂夾取鏟子實驗 圖4-24 利用機械手臂直接夾取盤內彈珠實驗 子計畫五: 第一年,成果如下: 管線依循 本研究中,對於環境較明瞭的場景,採用效率高的邊緣-直線偵測法,並針對場景 中的干擾物,試著以影像型態學的濾波器降低其影響,提高霍夫轉換的可用性。而當場 景複雜至無法提供完整的直線資訊時,再切換至顏色區塊法。期望藉此使辨識法較具全 面性。 本研究考慮載具沿著管線上方航行,以載具前端的攝影機俯視下方管線進行辨認。 畫面中管線的邊緣,以及管線本體與海床的顏色差異,是影像辨識上有利的線索。 因此本研究採影像型態學中的灰階斷開與閉合運算作為前處理,去除畫面中細小的
值或最小值去取代其亮度,達到填平亮度的凸起與凹陷,而藉由指定鄰近區域的大小, 可決定被過濾物件的大小程度。需注意的是,斷開-閉合運算容易在畫面上造成微弱的 波紋狀雜訊。因此,在上述型態學的處理後,再配合高斯濾波器降低這些波紋的影響。 下列圖片中,(a)與(b)為原始影像與經過前處理的影像,(c)是對(b)進行影像增強,藉此 觀察波紋的分佈與影響。 (a) (b) (c) 圖 5-1 (a)原始影像,(b)經過前處理後的影像,(c)經過增強後的影像 管線邊緣影像經過二值化後,必須經過骨架化運算,針對影像中的前景進行處理, 使其達到「細化」的效果,留下寬度為單一圖素的軸心部分,也就是去除線條粗細,只 保留幾何形狀的因素。圖 5-2 展示的是骨架化前後的影像。 (a)
考慮一個單純由物件與背景構成的影像,物件的灰階值為 I0,背景的灰階值為 I1, 其內部顏色相近,因此在二維色階圖中(圖 5-3),落於邊緣值接近 0 的群集,而影像平 面上物體與背景交界的邊緣部分,在二維色階圖中落於 r 處。如此一來,便可使物件與 背景的分水嶺變的更加明顯。 圖 5-3 二維色階圖 建立色階圖後,使用前面使用過的層遞式分類法以二維的方式將不同顏色區塊分離。圖 5-4 是以二維色階圖進行影像分割的結果。 圖 5-4 以二維色階圖進行影像分割的結果 本研究利用虛擬實境的方式進行模擬,以電腦軟體建立海底與管線的場景。場景中考慮 的因素包括(1)照度不均勻,(2)能見度有限,(3)生物殘骸漂浮,(4)管線與海床表面的不 規則與材質貼圖,(5)植物生長與石塊散佈,(6)泥沙掩蓋。模擬場景以及實際產生的影 像如圖 5-5 所示。 圖 5-5 模擬場景與使用的影像
第二年,成果如下:
本研究採用海利斯角隅偵測做為特徵選取的方法,不需事先得知目標物的模型與位 置參數。利用特徵比對,估測水下無人載具水平位置移動量,並以比例積分控制器設計 一視覺伺服控制器完成水下無人載具的懸停控制,在 3D Studio Max 8 建構的虛擬場景 中,以 Simulink 中的 Virtual Reality Toolbox 進行模擬實驗。
當我們對水下無人載具下達懸停的指令後,系統便將當時攝影機所拍攝到的影像記錄下 來,作為目標影像。其後藉著攝影機拍攝到的目前影像不斷與目標影像做匹配,估測水 下無人載具相對於目標的位移量,使推進器輸出適當的回饋,不斷修正水下無人載具的 位置,進而達到懸停的目的。 移動量估測 圖 5-6 水下無人載具影像幾何模式 視覺控制器設計 整 個 水 下 無 人 載 具 的 控 制 架 構 如 圖 5 - 7 所 示
。
圖 5-7 水下無人載具控制架構由於水下無人載具在水下活動時,外界干擾會造成穩態誤差,因此在加入控制器後,希 望能夠達到三個基本要求: 1 . 穩 態 誤 差 為 零 。 2 . 最 大 超 越 量 為 5 % 。 3 . 安 定 時 間 為 0 . 5 秒 。 而對於水下無人載具控制器的部分,可於視覺控制器完成後再配合視覺控制器另行設 計。 模擬裝置 利用裝設於水下無人載具底部的攝影機所提供的虛擬海床影像進行各項懸停控制實 驗。如圖 5-8 所示。 圖 5-8 模擬裝置示意 模 擬 場 景 為 參 考 水 下 地 形 與 海 地 管 線 繪 製 , 如 圖 5 - 9 : (a) (b) 圖 5-9 (a)場景 (b)場景俯視圖 圖 5 - 1 0 為 在 海 流 干 擾 下 懸 停 控 制 的 目 標 影 像 。 模 擬 結 果 如 圖 5 - 1 1 至 圖 5 - 1 3 所 示 。
圖 5-11 X 方向位置誤差(0.5 m/s 海流干擾懸停控制)
圖 5-12 Y 方向位置誤差(0.5 m/s 海流干擾懸停控制)
具正弦海流干擾下模擬實驗 設 定 水 下 無 人 載 具 的 X 方 向 與 Y 方 向 皆 受 到 正 弦 海 流 干 擾,X 方 向 與 Y 方 向 的 平 均 大 小 均 為 0 . 5 m / s, 振 幅 大 小 為 0 . 5 m / s, 週 期 為 4 0 秒 , 速 度 曲 線 如 下 圖 所 示 。 圖 5-14 正弦海流干擾 懸 停 控 制 的 目 標 影 像 同 圖 5 - 1 0。 模 擬 結 果 如 圖 5 - 1 5 至 圖 5 - 1 7 所 示 。 圖 5-15 X 方向位置誤差(正弦海流干擾懸停控制)