Volume19, No3, January 2015, pp. 239-251
1國立中央大學土木工程學系 碩士 收到日期:民國 102 年 07 月 28 日
2國立中央大學太空及遙測研究中心 研究助理 修改日期:民國 103 年 08 月 17 日
3國立中央大學太空及遙測研究中心與土木工程學系 教授 接受日期:民國 103 年 12 月 28 日
4國立中央大學土木工程學系 碩士生
*通訊作者, 電話: 03-4227151 ext.57676, E-mail: [email protected]
以統計同質分布散射體干涉雷達技術偵測地表變形
黃郁棠
1張奇
2*吳究
3蔡長興
4摘 要
合成孔徑雷達干涉技術不受日夜及天候限制的條件,至今仍是光學影像無法取代的優點。而衍生的 干涉雷達技術能建置數值地形模型,亦或是量測地表變形等,近年來也被廣泛的研究。
干涉雷達技術主要係藉發出的微波經目標反射後,由兩個不同位置的接收器收到回波訊號的相位差,
來獲取地表三維資訊。如利用多時期的影像重複此方法後所得到的三維資訊做比較,最後可獲得地表變 形速率的資訊。而長時間觀測中,因多時期影像同調性較低,故須找出訊號穩定的永久散射體加入計算,
藉其回波穩定的特性來提升其量測的精度。但台灣地區地貌變化快速,使得永久散射體在山地、叢林等 區域密度過低,使得永久散射體干涉雷達技術效果不甚理想。
故本研究主要是在探討合成孔徑雷達干涉技術用於臺灣地區量測地表變形所遭遇的問題與改善方法。
原先永久散射體數量不夠導致密度不足的部份,加入了分布散射體來提升,密度由每平方公里 0.3 個點提 昇至 4.6 個點。分布散射體是經由統計及空間適應性濾波處理後的影像,其回波一致對應的像素,和永久 散射體原理上為不同概念,但其有一定的可靠性。最後結合兩者,計算出地表變形速率,改善原先方法 上的不足以得到更好的成果。
關鍵詞:干涉雷達、永久散射體、分布散射體、地表變形
1. 前言
雷達影像為主動式遙測系統,所拍攝出的影像 屬於距離投影,在影像辨識上較不直觀,學習難度 較高。另外雷達影像的斜距解析度與雷達脈衝寬度 有直接的關係,雖然增加脈衝寬度能提高回波的訊 雜比,但是斜距的解析度較差;若要提昇斜距方向 的解析度,則訊號就會相對減弱(Lillesand et al., 2007);而方位解析度與天線長度成反比。為了突 破解析度與天線長短的限制,進一步利用都卜勒 (Doppler) 頻 率 位 移 的 原 理 發 展 出 合 成 孔 徑 雷 達 (Synthetic Aperture Radar, SAR),利用合成天線陣 列來增加方位解析度,使雷達影像的解析度不再受 限於接收天線的大小,更能應用於衛星上,達到長 時期觀測的目的(陳鴻緒,2001)。
雷達影像使用的波長較長,使目標回波的振幅 (Amplitude)與相位(Phase)的資訊可同時接收,如有 兩幅 SAR 影像拍攝同一地區,即可進行干涉處理。
換言之可計算出兩幅影像的回波訊號相位差,並產 生高精度之數值地形模型(Digital Terrain Model, DTM) , 此 為 干 涉 合 成 孔 徑 雷 達 (Interferometric SAR, InSAR)的原理(Rabus et al., 2003)。
利用干涉雷達技術,各時間點的 DTM 可藉由 多時期影像對來獲得。更進一步可利用合成孔徑雷 達差分干涉技術(Differential InSAR, DInSAR),精 確的計算出地表變形量(Gabriel et al., 1989)。在 1999 年 9 月 21 日集集大地震後,地質學家利用 DInSAR 技術測得地表變形,作為了解地震造成地 表變形之進一步資訊,可謂貢獻良多(Chang et al., 2004)。但是在長時期影像序列中,由於拍攝間隔
時間長、且衛星的基線長度不一致,不能確保每幅 干涉影像的品質,加上多植被與地貌變化劇烈的地 方會降低同調性(Coherence),導致 DInSAR 成果之 干涉條紋無法辨認。
本研究採用永久散射體(Persistent Scatterer, PS) 技術。此方法是在長時間的觀測中,各時期影像同 調性較低,故需尋找空間中長時間訊號穩定的永久 散射體當作參考點來求得地表變形速率。但在如台 灣這類地表變化快速的區域,難以找到一定數量的 永 久 散 射 體 , 故 加 入 了 分 布 散 射 體 (Distributed Scatterer, DS)來提升其數量。分布散射體是經由統 計及空間適應性濾波處理後的影像,其回波一致對 應的像素,在原理上雖和永久散射體為不同的概念,
但有其一定的可靠性。最後結合 PS 及 DS 計算出 地表變形速率,以得到更佳的成果。
2. 研究方法
長時間的觀測中,多時期影像的同調性會逐漸 降低,使求得的地表精度也較不理想。為克服此限 制,Ferretti et al. (2000)提出 PSInSAR 之技術。
2.1 PSInSAR 原理
PSInSAR 是要尋找自然界中穩定的散射體,
之後利用這些永久散射體的訊號進行地形變遷分 析,如此可避免人工放置角反射器的麻煩,並且提 高大範圍變遷偵測的精確度。
Mora 等學者在 2003 年利用主、副影像之間的 影像同調性作為依據,並利用式(1)來量化為影像 同調性。當該像素在所有與干涉圖對應的同調數值,
若超過所設立的門檻,即可以稱為永久散射體。
本研究採以影像同調性的數值來做為選擇 PS 點的依據。同調性的公式如式(1),即可得到同調 性的指標
γ
(Ferretti et al., 2000)。* 2 2
* 1 1
* 2 1
S S S S
S γ S
(1)其中 S1、S2為主、副影像對應點的複數。𝑆1∗、𝑆2∗為 S1、S2之共軛複數。〈𝑆1∙ 𝑆2∗〉為該主、副複數影像之 內積。
假設使用 N+1 幅 SAR 影像,最多可以產生 (N+1)N/2 幅干涉圖,並從中選擇 I 幅干涉圖作為解 算地表變形之用,與之對應會有相同數量的同調性 圖,當該像素在這些同調性圖中皆具有大於門檻的 特性,即認定該像素為 PS 點。
而此做法篩選出的 PS 點數量,會因選擇的同 調性圖數量及其主、副影像的空間基線有絕對的關 係;當選擇較多的同調性圖,PS 點的數量則會下 降(Yang, 2011)。
2.2 分布散射體
Ferretti 等學者在 2011 年的研究中提出,大部 分目標雖然只有在部分干涉圖有中等的同調性,但 該目標如果與鄰近像素為同一物體,理論上會擁有 相同的統計行為。藉由 K−S 檢定,判斷鄰近像素 的回波訊號是否一致,如訊號一致,則可降低訊雜 比,並提高接收訊號的可信度,而屬這類的目標則 被稱為 DS。
分布散射體是與大部分鄰近像素擁有相同統 計特性的目標,所以該目標在搜尋視窗中有多少統 計同質像素(Statistically Homogeneous Pixel, SHP),
成為判斷該目標是否為分布散射體的依據與門 檻。
為了克服 PSInSAR 技術在部分區域密度不夠 的缺陷,在計算地表變形速率時,本研究同時使用 PS 與 DS 的訊號來提高量測點的密度。
2.3 Kolmogorov−Smirnov(K−S) 檢定
利用統計檢定方法中的假說檢定,可以判斷兩 個數列是否擁有相同的母體,而兩樣本的 K−S 檢 定可以達到預期的結果,判斷兩像素是否為同一目 標,且擁有相同的統計特性。
假設在同一地區有 N+1 幅 SAR 影像,並且已
經正確的套合與重新取樣,影像套合使用方法為正 規化相關係數法、重新取樣使用方法為雙線性內插 法。d 為複數向量:
0( ), 1( ),..., ( )
T)
(P d P d P dN P
d (2)
其中的(∙)T為轉置運算、P 代表每幅影像中相對應 的像素、dn(P)為 P 點在第 n 幅 SAR 影像中的複數 回波訊號。
因 K−S 檢定是應用於實數向量上,而不是複 數,所以在執行檢定時是使用強度影像,並非實數 或虛數部分;強度影像向量可以分別對 d 內的元素 取絕對值計算出(𝐱 = |𝐝|),進一步利用式(3)建立強 度影像向量的累積機率分布函數 S:
X x
x X N x
n
x X X
S
N n n
if ,
1 if 1,
if ,
0 )
( 1
0
(3)
其中xn為強度影像向量中的第 n 個元素。而評估 兩像素 P1和 P2是否為 SHP(P2為 P1搜尋視窗中 的像素),需要計算這兩像素的 S 之間最大的差 DN+1,如式(4)所示:
) ( ) ( sup 2 /
1 1 2
1 N S X S X
DN xR P P (4) 其中 sup 為最小上界之意,計算方法就是先計算兩 像素累積密度函數,再比較兩累積密度函數最大差 值。
利用圖 1,實線為
S
P1、虛線為S
P2、圖中 紅線表示此兩累積分布函數中最大的差 D,而式(4) 可改寫為𝐷𝑁+1= √𝑁 + 1/2𝐷。而 DN+1可利用 K−S 分布來近似,K−S 的累積機率分布函數H(t)如式 (5)中表示:) 2 exp(
) 1 ( 2 1
) ( ) (
2 2 1
1 1
t k t
H t D P
k k N
(5)
當 DN+1小於門檻 c 時,K−S 檢定認為此兩樣 本擁有相同的母體。換言之,此兩像素 P1和 P2為 同一目標所發出的訊號,可以視為影像之統計同質 元素;而門檻值設定是根據顯著水準1H(t)
來決定的,使其維持在 95%信心水準。
K−S 檢定的流程結束後,即可知道雷達影像中,
每一像素在搜索視窗中有多少 SHP,而當 SHP 的 數量超過使用者訂定的門檻,即認為該像素為分布 散射體。
圖 1 兩樣本 K−S 檢定示意圖
2.4 空間適應性濾波
相對於永久散射體的高穩定性,分布散射體在 計算時若未經過處理,容易受到時間、空間因素所 導致自然目標不穩定,訊雜比較高。Lanari et al.
(2004)在 SBAS(Small BAseline Subset)方法中有提 及,利用低通濾波處理可以有效增加訊雜比,故在 此採用此概念利用一般低通濾波能有效提高訊雜 比,但是會降低像素解析度,而降低解析度會導致 高同調性和低同調性的像素被平均,這是在做處理 時所不期望的結果。故權衡後,選擇了空間適應性 濾波,主要是能依空間同質特性自行調整,以提升 DS 點之相位精度。
進行濾波時,只使用在統計上與目標互為 SHP 的像素;而該目標經濾波處理後的協方差矩陣可以 利用式(6)求得:
dd d
d C
C H 1 H ˆ
P
P P E
P (6) 其中的(∙)H為 Hermitian 共軛運算子、為 SHP 的 集合,表示集合內的個數。
強度影像數值
2.5 量測點相位差分
由於 PS 點與 DS 點間是散布於影像之中,故 必須建立點與點間的位置互相關聯性,以方便後續 的處理。最簡單的位置互相關聯性建 立方 法 係使 用 Delaunay 三 角 網 , 如 圖 2 所 示。
圖 2 Delaunay 三角網示意圖 (Mora et al., 2003)
Delaunay 三角網是利用(1)任何三角形的外接 圓不可包含第四點,(2)當有兩種以上三角形進行 分割時,應用最大化最小角之準則。以這兩個條件 來進行三角網的生成,其成果在同一組離散點中所 構成的三角網是唯一的。
2.6 最小二乘平差
當量測點之間的相互關係建立後,即可進行量 測點間的相位差分,即將兩個量測點的相位相減,
可得下式(Mora et al., 2003):
i P P P P i P P i P
i P P
P P i P
i P P i P
i i
P P
w h
w
h λ r
B λ
2 1, 2 1, T 2 1, 1
2 1,
2 1, T 2
1, 1 1 2
1,
4 sin
4
ν β
ν C t
其中
為波長(m)。𝐵⊥𝑖為主、副影像之空間垂直基 線長(m);𝑟𝑃1𝑖 為視距方向到點 P1 的距離(m);𝜃𝑃1𝑖 為 視距方向到點 P1 的入射角(rad)。 𝑃1 𝑃2𝑖 表示在第i
幅干涉圖中 P1與 P2間的相位差(rad)、 𝑃1 𝑃2為 𝑃1與 𝑃2差分後之高程項(m)、𝐭為時間差(s)向量,其中的元素為 SAR 影像拍攝時間差
𝐭 = [𝑡1− 𝑡0 𝑡2− 𝑡1 ⋯ 𝑡𝑁− 𝑡𝑁−1]T、𝐂𝑖為第
i
幅干 涉圖排列各個時間段的時間組合矩陣、 𝑃1 𝑃2為相 對地表變形速率(mm/yr)向量,其中的元素為 P1與 P2間的變形速率差值。另因為量測點之間的距離相 近,原則上不超過 500 m,所以大氣誤差理應不大;差分方法可以顯著的降低都卜勒中心頻率不同的 影響,所以式(7)中,將大氣層延遲之相位誤差、
都卜勒中心頻率誤差及雷達斑駁相位誤差合併成 為殘差 𝑖𝑃1 𝑃2。
為了利用最小二乘法計 算 P1 與 P2 間 之
𝑃1 𝑃2與 𝑃1 𝑃2,式(7)經過移項後可以改寫為式
(8):
1 , 2
T2 2 , 1 1
2 , 1
2 T 1
T 1 2
1 1
1
T 2 , 1 2
2 , 1 1
2 , 1
2 , 1
2 , 1
, , ,
, , ,
, , ,
I P P P
P P P
I I P P
P
I P P P
P P P
P P
P P
w w
w h
w
β β
β Β
α Β α A Φ
ν w Α Φ
(8)
其中的Φ為相位差向量,其中的元素包含 P1 與 P2 在所有干涉圖上的相位差、A 為設計矩陣,包 含高程轉換相位係數和時間組合矩陣、w 為殘差向 量。
利用最小二乘法即可求出 𝑃1 𝑃2與 𝑃1 𝑃2,如 式(9):
A P A
A P Φν
d d
P P
P
hP T 1 T 2
, 1
2 , 1
ˆ
ˆ
(9)
此處
∙̂
表示最小二乘法計算出的數值、Pd為二次 差分的權矩陣。本研究在單獨處理 PS 時暫時設定 為等權;在處理 PS 與 DS 時,則是給予相對的權,PS-PS 給予較大的權、DS-DS 給予較小的權;實 際上經測試後,PS-PS 與 DS-DS 權的比值設為 1,000:1。
利用上述各小節的計算程序,即可由雷達影像 集合中找尋出 PS 與 DS 點,並且計算出高程誤差 和地表變形速率。流程圖如圖 3。
(7)
3. 實驗與結果
本實驗使用 ERS 影像,軌道、像幅編號分別 為 232、3141,而影像的解析度在進行 10:2 多視 點處理後,方位與斜距方向的解析度約為 40 m;
影像範圍涵蓋南臺灣嘉義、台南地區,如圖 4 左。
使用影像從 1996 年 3 月至 1999 年 12 月共 13 幅影 像,除 1996 年 3 月 6 日所拍攝之影像為 ERS1 外,
其餘影像皆為 ERS2。且因影像範圍太寬廣,所以 本實驗區選定長寬各 40 km 的台南市區影像作為 研究區域,如圖 4 右的紅框所示。
圖 3 實驗流程圖
圖 4 測試區示意圖
在干涉影像部分,因使用了 13 幅雷達影像,
在不考慮主、副影像交換的情況,最多可以產生 78 幅干涉圖;而本研究在尋找永久散射體的指標 為影像之間的同調性,即使用的干涉圖數目也會直 接影響永久散射體的數量(Yang, 2011)。
當所使用的干涉圖增加,利用與干涉圖對應的 同調性圖增加,而找尋到的永久散射體會減少,如 使用所有的同調性圖作為尋找永久散射體的依據,
在研究區域只有一個永久散射體;所以在此試驗中 只取 18 幅的干涉圖,選取的原則為每一幅雷達影 像皆要使用到,且垂直基線需小於 200 m。
表 1 表示 13 幅雷達影相互之間的垂直基線與 時間基線,表格中的第一行表示使用的主影像,第 一列表示使用的副影像,表格中的數值中上三角表 示主、副影像之間的垂直基線,下三角表示主、副 影像之間的時間基線,其干涉圖如圖 5 表示。
圖 5 實驗區域影像配對干涉圖
960306_960307 960306_990121 960306_990506 960306_990923
960306_991028 960307_981112 960307_990506 960307_991028
981112_990121 981112_990506 981112_990715 981217_990401
981217_991202 990121_990506 990121_990715 990506_991028
990610_990715 990819_990923
表 1 實驗區干涉圖垂直基線(單位:m)與時間基線(單位:day)
960306 981112 990121 990506 990715 990923 991202
960307 981217 990401 990610 990819 991028
960306 −66 −167 −74 163 −76
960307 1 −94 −15 −33
981112 981 −42 87 −168
981217 80 −243
990121 1,051 70 95 −164
990401 104
990506 1,156 1,155 175 104 −23
990610 154
990715 245 174 35
990819 −549
990923 1,296 35
991028 1,331 1,330 175
991202 350
3.1 永久散射體成果
Mora et al. (2003)文獻中建議同調性門檻為 0.25-0.38,並建議取較低的值,故本研究測試的門 檻值設為 0.28,且利用此門檻能得到較佳之 PS 點 數。為了判斷永久散射體,找到同調性數值皆高於 門檻的像素在研究區域內總共有 492 個點通過門 檻,其分布的情況如圖 6。
因為 PS 是離散在影像之中,在計算 PS 的地 表變形速率之前,需利用 Delaunay 三角網建立 PS 間的相互關係,如圖 7。當 Delaunay 三角網建立完 成,即可開始計算點與點間的相位差,並利用最小 二乘法先計算其中相對的高程與變形速率,再利用 網形平差計算各 PS 絕對的高程與變形速率。最後 得到高程項與視線(Line of Sight, LOS)年平均地表 變形量,如圖 8 所示。
圖 6 永久散射體分布圖 圖 7 永久散射體所建立的三角網形
圖 8 永久散射體的高程項(上圖)與 LOS 的年平均地表變形量(下圖)
由永久散射體研究結果顯示,這個區域的永久 散射體密度並不高,於地表變形的估計,可能對網 形幾何有不良的影響。於研究區域中共找出 492 個 PS 點,PS 的平均密度大約為每平方公里 0.3 個 PS 點。由於在測試中使用的是 1996 年至 1999 年 的影像,沒有當時的地表變形速率(水準網或 GPS 資料),所以假設起始點的地表變形速率與高程皆 為零。換言之,若有多個控制點可以更準確的估計 各點的真值,並有效的約制誤差來提升品質。計算 出的地表變形速率與高程是相對於起始點,並非真 實的數值。
研究成果顯示,PSInSAR 技術能確實得尋找 出永久散射體,並利用最小二乘法計算地表變形速 率,對於無法直接利用干涉圖來獲得地表變形的區 域而言,是一個良好的技術。
3.2 分布散射體成果
在 PSInSAR 的成果中,可發現 PS 點的分布集 中於都會區,因為建築物提供良好的回波訊號,但 於山區或有植被的區域 PS 點密度會下降,為了提 高量測點的密度,利用 K−S 檢定判斷每一個像素 的 SHP 數目,其成果如圖 9。測試中搜索視窗的大 小為 99。由圖 9 中可看出,因地面解析元素中,
散射回波會有強弱之別,PS 散射體密度較高的都 會區域,SHP 的像元數目相對地較低。而植被區的 SHP 數目普遍偏高,而海洋的部分更全部都是一致;
由此可證,兩樣本的 K−S 檢定能正確的判斷,兩 像素是否擁有相同的統計特性。
進一步的設立 SHP 數目門檻,當該像素的 SHP 數目高於門檻,即判斷為分布散射體。經過 K−S 檢定後,總共找到 6,880 個分布散射體(如圖 10)。
在使用 DS 點訊號計算地表變形速率前,因 DS 點 是與鄰近像素擁有相同特性的點,必須利用空間適 應性濾波,提高訊號的訊雜比,才能使用 DS 點的 訊號,圖 11 與圖 12 為濾波後的強度影像與干涉 圖。
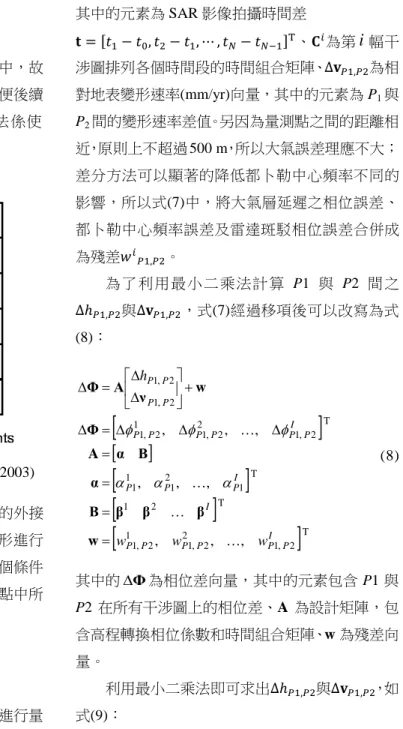
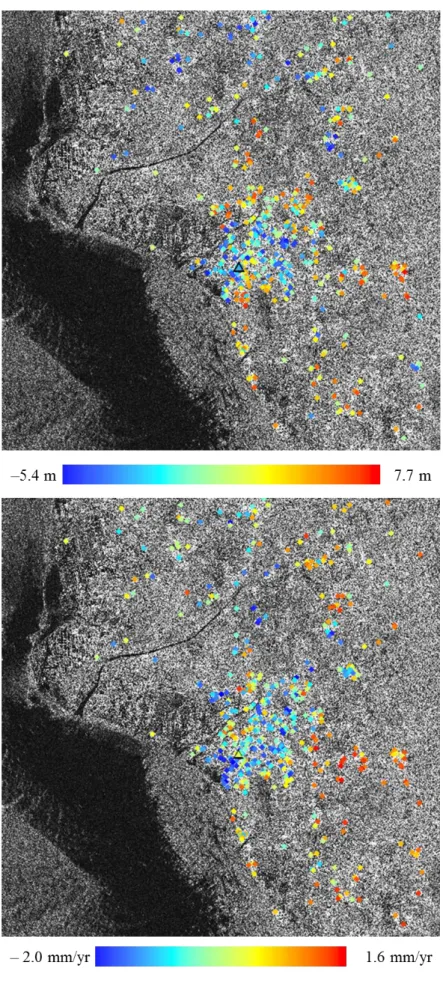
在找到分布散射體的位置與訊號後,加入永久 散射體的資訊,即可利用最小二乘法計算年平均地 表變形與高程項,如圖 13 與圖 14。
在加入分布散射體後,原本因沒有找到永久散 射體,而無法計算地表變形速率的區域,能有效的 計算出成果,總共找出 7,372 個量測點,使量測點 密度提高至每平方公里 4.6 個點;而成果的最大上 升速率為 3.1 mm/yr 於影像左側與下方,最大下陷 速率為 3.9 mm/yr 則集中於影像右側,其變動的範 圍比單純使用 PS 點要大,因為 PS 點沒有偵測到 變動最劇烈的區域。
高程變量最大值為 10 m,集中在影像的中上 方,最小值為7 m,於影像的下方,相較於 PSInSAR 的成果,誤差的範圍較大;在部分的量測點,計算 的高程項有些許的差距,但因為計算時的點數較多,
所以鄰近的高程變化較為平滑。
圖 9 每像素擁有的 SHP 數量
圖 10 永久散射體(紅)與分布散射體(綠)散布圖
圖 11 經空間適應性濾波過濾後產生的干涉圖
圖 12 經空間適應性濾波後產生的干涉圖
960306_960307 960306_990121 960306_990506 960306_990923
960306_991028 960307_981112 960307_990506 960307_991028
981112_990121 981112_990506 981112_990715 981217_990401
981217_991202 990121_990506 990121_990715 990506_991028
990610_990715 990819_990923
圖 13 所有量測點的年平均變形量 圖 14 所有量測點之高程項
4. 結論
由量測點成果中顯示,統計同質分布散射體能 解決原來永久散射體干涉雷達技術可能遭遇永久 散射體數量不足的狀況。除了能更清楚的了解影像 中地表的變形趨勢,且在用最小二乘法解算時,三 角網形不會出現銳角三角形或特別長的邊。從結果 來看,原先的永久散射體干涉雷達捨去的資訊,在 加入分布散射體後保留了更多影像的資訊,在如本 實驗地表變形迅速的區域散射體數量有著顯著的 提升。總體算例中,高程變量最大值為 10 m,最 小值為7 m,年平均地表上升速率最大值為 3.1 mm,下陷速率最大值為 3.9 mm。
受限於資料取得困難,若有各時期的影像控制 點資料,不僅能夠使資料更貼近各該時期狀況,更 能使誤差極小化。在此使用的最小二乘法相較於常 用的模型同調函數,可簡單地將更多額外資訊加入,
並以高效率來求得最佳解,也是本研究價值所在。
參考文獻
陳鴻緒,2001。使用ERS資料與SAR干涉技術在臺 灣地區求定DEM之實務探討,國立成功大學 碩士論文,臺南。
Chang, C. P., Wang, C. T., Chang, T. Y., Chen, K. S., Liang, L. S., Pathier, E. and Angelier, J., 2004.
Application of SAR Interferometry to a Large Thrust Deformation: the 1999 Mw=7.6 Chichi
Earthquake in Central Taiwan, Geophysical Journal International, 159(50):9–16.
Ferretti, A., Prati, C. and Rocca, F., 2000. Nonlinear Subsidence Rate Estimation Using Permanent Sactterers in Differential SAR Interferometry, IEEE Transactions on Geoscience and Remote Sensing, 38(5):2202–2212.
Ferretti, A., Fumagalli, A., Novali, F., Prati, C., Rocca, F. and Rucci, A., 2011. A New Algorithm for Processing Interferometric Data-Stacks:
SqueeSAR, IEEE Transactions on Geoscience and Remote Sensing, 49(9):3460–3470.
Gabriel, A. K., Goldstein, R. M. and Zebker, H. A., 1989. Mapping Small Elevation Changes over Large Areas: Differential Radar Interferometry, Journal of Geophysical Research, 94(7):9183–
9191.
Lanari, R., Mora, O., Manunta, M., Mallorquí, J. J., Berardino, P. and Sansosti, E., 2004. A Small-Baseline Approach for Investigating Deformations on Full-Resolution Differential SAR Interferograms, IEEE Transactions on Geosciences and Remote Sensing, 42(7):1377–
1386.
Lillesand, T. M., Kiefer, R. W. and Chipman, J. W., 2007. Remote Sensing and Image Interpretation, John Wiley, New York.
Mora, O., Mallorquí, J. J. and Broquetas, A., 2003.
Linear and Nonlinear Terrain Deformation Maps From a Reduced Set of Interferometric SAR Images, IEEE Transactions on Geosciences and Remote Sensing, 41(10):2243–2253.
Rabus, B., Eineder, M., Roth, A. and Bamler, R., 2003. The Shuttle Radar Topography Mission—a New Class of Digital Elevation Models Acquired by Spaceborne Radar, ISPRS
Journal of Photogrammetry and Remote Sensing, 57(4):241–262.
Yang, C. H., 2011. An Improved PS-InSAR Approach, Master of Science Thesis, National Cheng Kung University, Tainan.
1 M.Sc. of Department of Civil Engineering, National Central University Received Date: Jul. 28, 2013
2 Researcher of Center for Space and Remote Sensing Research, Revised Date: Aug. 17, 2014
3 National Central University Accepted Date: Dec. 28, 2014
3 Professor of Center for Space and Remote Sensing Research / Department of Civil Engineering, National Central University
4 Master student of Department of Civil Engineering, National Central University
*.Corresponding Author, Phone: 886-3-4227151 ext.57676, E-mail: [email protected]
Surface Deformation Detected by a Radar Interferometric Technique Using Statistically-Homogeneous Distributed
Scatterers
Yu-Tang Huang 1 Chi Chang 2* Joz Wu 3 Chang-Xing Tsai4
ABSTRACT
The technique of the Synthetic Aperture Radar (SAR) is developed in recent years. Without the limit of the weather and sunshine, SAR is different from the optical technique. The extension of the improved SAR technique, such as Interferometry SAR (InSAR) and Persistent Scatterer InSAR (PSInSAR), are widely used to build the Digital Terrain Model (DTM) and detect the deformation rate of the surface.
The basic theory of an InSAR technique is based on time difference in arriving at two different receivers from the signal which was just sent out by the transmitter of a satellite. The changes in height can be converted to phase differences. However, if the observed time is extended, the dependence and precision will decrease because of a lowering coherence of two images. This problem may be solved by using the PSInSAR technique.
The method is used to find points with stable signatures. According to the characteristics of these points, the result usually has high precision, which is mentioned in many research papers. If this method is applied to SAR images of Taiwan areas, it is not so satisfactory because the surface deformation is too erratic. So, our research aims to improve this method to make it appropriate for the country.
To do this, additional information is needed. We should find other points called the distributed scatterer.
Distributed scatterers are selected by the center pixel of a region which has the same signal reflection. They have excellent dependence on account of statistical calculations. As distributed scatterers are included, the improved effect is shown in our research.