ContentslistsavailableatScienceDirect
Journal of Systems Architecture
journalhomepage:www.elsevier.com/locate/sysarc
ECASS: Edge computing based auxiliary sensing system for self-driving vehicles
Xiong Wang
a, Tianpeng Wei
a, Linghe Kong
a,∗, Liang He
b, Fan Wu
a, Guihai Chen
aa Shanghai Jiao Tong University, China
b University of Colorado Denver, USA
a r t i c le i n f o
Keywords:
Autopilot systems Self-driving vehicle Trajectory GPS
a b s t r a ct
Self-drivingvehicles,combiningautomobileswithautopilotsystems,enableintelligentandsafedriving.Self- drivingvehiclescanachieveaccurateautomaticnavigation,trajectorytracking,andautomaticovertakingby usingGPS,radars,andinertialmeasurementunit(IMU).Amongthem,overtakingisessentialinordertoavoid excessivewaitingtimeandimprovethetrafficefficiency.Whenfollowingalargetruckorbus,theself-driving vehiclecannotensurethesafeovertakingbecausetheline-of-sight(LOS)rangedetectedbytheradarandcamera isblocked,thusunabletoperceivethesurroundingenvironmentaccurately.Acommonlyadoptedmitigation istofollowthetruckorbusatareducedspeed,atthecostofreducedtrafficefficiencyandmoretrafficjams.
Tomitigate thisdeficiency,thispaperdevelopsanauxiliarysensingsystemusingedgecomputingtolocate nearbyvehiclesforself-drivingvehicles,calledECASS.Specially,infrastructuredeployedalongtheroadlike serversareutilizedtoaccuratelylocatevehiclesaccordingtoGPSandwirelessinformationsuchasWiFiorDSRC.
Subsequently,theserverwilltransmitthelocalizationinformationofnearbyvehiclestotheself-drivingvehicle, basedonwhichitcandeterminethedrivingstateforthenextmomentdespiteoftheobstruction.Extensive simulationsverifythatECASSbasedtrajectoryismuchclosertotherealtrajectorythanGPS.Especiallywhen GPSerrorissetwithin10m,ECASScanreducethemeanabsolutelocalizationerrorfrommorethan7mtoabout 3m.
1. Introduction
Inrecentyears,self-drivingvehicleshaveattractedextensiveatten- tionfrombothindustryandacademiabecauseofits safetyandtrav- ellingefficiency[1–3].Inparticular,withtheincreaseinthenumber ofvehicles,theinjuredpersonsanddeathsintrafficaccidentsarealso increasing.Asacriticaltechniqueinfuturevehicles,autopilotcansub- stantiallydecreasethetrafficaccidentsinducedbyhumanfactorsand thusenhancethetravellingsafety.Thetrafficsharingbasedontheau- tomaticdrivingtechniquecaneffectivelyalleviatethetrafficcongestion andpollutionproblems[4,5].
Researchershavedesignedvariousdetectionalgorithmsbased on theimageandsignalprocessing,toaccuratelysensetheenvironments aroundtheself-drivingvehicle[6–8].Theself-drivingvehiclewillthen determinethedrivingstateforthenextmoment,suchasovertaking, acceleration/deceleration,ortravellingattheoriginalspeedbasedon theacquiredenvironmentalinformation.
Compared to acceleration/deceleration, or travel at the original speed, theexecution of overtaking for self-drivingvehicles becomes muchmorecomplicated.Itmainlyconsistsofthreesteps.Firstly,the
∗Correspondingauthor.
E-mailaddress:[email protected](L.Kong).
self-drivingvehiclechangesthelaneaccordingtotheplannedtrajec- tory.Secondly,itdrivesalongtheovertakenvehicleataprescribedlat- eraldistance.Finally,itwillreturntotheoriginallaneinfrontofthe overtakenvehicle[9,10].Majorityof researchworkon thisproblem hasfocusedontheplanningorpredictionoftheovertakingtrajectory [9,11,12].
Availableliteraturehasplannedtheirovertakingtrajectoriesunder thepremisethattheradarorcameraintegratedintheself-drivingvehi- clecandetectandtrackobstacleswithoutbusesortrucksaroundwhen overtaking.However,undersomespecialcircumstances,thecameraand radarmaybeblockedbythetruckorbusinfrontorbehind,rendering theself-drivingvehiclepartiallyorevencompletelyunknownaboutthe surroundings.Therefore,ithastofollowthetruckorbusatareduced speed[13].Obviously,thisapproachincursincreasedtimeconsumption andtrafficcongestion.
However,GPSbasedlocalizationerrorscanreachupto10m,and evenlocalizationerrors inmap-matching basedGPS sufferfrom5m [14,15].Suchalargelocalizationerrormaycausethewrongdriving stateadoptionforself-drivingvehicles,riskingthetrafficsafety.Inre- sult,theauxiliarysensingsystemnamedECASSisdevelopedtoprovide accuratevehiclelocalizationinformationintheproximityoftheself-
https://doi.org/10.1016/j.sysarc.2019.02.014
Received5October2018;Receivedinrevisedform21January2019;Accepted13February2019 Availableonline13February2019
1383-7621/© 2019ElsevierB.V.Allrightsreserved.
drivingvehiclebasedon edgecomputing,whenitcannotaccurately locatenearbyvehiclesonlyusingthecameraandradar.
Inparticular,whentheself-drivingvehiclecannotaccuratelysense thesurroundingenvironmentsduetoobstruction,itwillsendarequest tonearby servers,soastoinformtheseserversofobtainingthecur- rentvehiclelocalizationneartheself-drivingvehicle.Intheseservers, aninformationfusionalgorithmwithregardtothewirelesssignaland GPSisdesignedtoestimatethepositionofnearbyvehicles.Finally,the locationofeachvehicleneartheself-drivingvehiclewillbetransmit- tedtotheself-drivingvehicle.Theself-drivingvehicledeterminesthe drivingstateforthenextmomentbasedontheacquiredlocalization information,despiteoftheobstruction.Inthispaper,thedrivingstate includesovertaking,changinglanes,acceleration,deceleration,braking, andtravellingattheoriginalspeed.
Thecontributionsofthispaperarelistedasbelow:
• We propose an edge computing based framework toassist self- drivingvehiclestoachieveaccuratenearbyvehiclelocalizationand trackingwhenself-drivingvehiclescannotaccuratelysensethesur- roundingenvironment.
• Inroadsideservers,anfusionalgorithmrelatedtoGPSandwireless signalinformationisdevelopedtomeasurethelocationofvehicles neartheself-drivingvehicle.Accordingtotheseacquiredlocaliza- tioninformation,theself-driving vehiclecandeterminethe driv- ingstateforthenextmomentevenwhenpartiallyor completely blocked.
• ExtensivesimulationsarecarriedouttodemonstrateECASS’shigh efficiency. Compared toGPS, ECASS based localization is much closertotherealvehicleposition,especiallywhentheGPSbased localizationerrorbecomeslarger.
Thepaperis organized asfollows: Section2presents therelated literatureonself-drivingvehicles.Thepreliminariesareintroducedin Section3,includingthemotivationandproblemstatement.Then,the systemoverview,algorithmdesign,andtheselectionstrategyofservers arepresentedinSection4,andwepresenttheperformanceevaluation inSection5.Finally,weconcludethispaperinSection6.
2. Relatedwork
Uptonow,thereexistssubstantialresearchworkrelatedtotheau- topilottechnique,includingthehardwaredesignsuchasdetectionradar andcamera,algorithmdesignintermsofinformationfusionfromthese hardware,andthetrajectoryplaninthetravellingprocess[16–18].
HardwareHardware isthefundamentalpartforautopilot.High- qualityhardwareisabletoperceivenearbyinformationmoreaccurately [19,20].Forexample,Mercedes-BenzequipS-ClassS500INTELLIGENT DRIVEwithclose-to-productionsensorhardware.Inparticular,vision andradarsensorscombinedwithdigitalmapsareemployedtosense nearbytrafficconditions[21],andthissystemhasbeentestedinanau- tonomousmannerfromMannheimtoPforzheim,Germany.Asapromis- ingtechnique,lidarcanalsoperceivetheenvironmentinthesameway asradar.Duetomuchshorterwavelength,thehighresolutionandrelia- bilityrenderitanecessityfordriverlesscarsinthefuture[2].However, thesize,complexity,andcostofthecurrent generationof lidarsen- sorshinderitscommercialization. Therefore,extensiveacademicand industryresearchhasattemptedtomakelidarsensorssmaller,easierto manufacture,andcheaper[6,22].
Information fusion algorithm After obtaining the information aboutnearbyenvironments,howtodealwiththesemassiveinformation becomescrucialforself-drivingvehicles[23,24].Basedonthestereo camerasystem,Frankeetal.[25]presentthevisionalgorithmsforob- jectrecognitionandtracking,free-spaceanalysis,trafficlightrecogni- tion,lanerecognition,aswellasself-localization.Further,inorderto realizeanaccuratevisualunderstandingofcomplexurbanstreetscenes, abenchmarksuiteandlarge-scaledatasetnamedCityscapesisintro- ducedtotrainandtestpixel-levelandinstance-levelsemanticlabeling.
Bothdetailedanalysisandperformanceevaluationhavebeencarried outbasedontheproposedbenchmark.Unlikecamerabaseddetection, asignalprocessingalgorithmbasedonradarisdesignedtoestimatethe speedandsizeofvehiclesin[26].Finally,someresearchworkproposes tobuildavehicledetectionsystemfusingradarandvisiondata[27].
TrajectoryplanalgorithmAccordingtotheaccurateunderstanding of surroundingenvironments,self-drivingvehiclescan determinethe drivingstateforthenextmoment[28,29],suchasbraking,acceleration, changingthelane,orovertaking.Amongthem,overtakingisthemost complicatedprocess.Toachievesafeovertaking,Milanesetal.[30]de- velopafuzzy-logicbasedcontrollertocontrolthelateralmovementand longitudinalmovementofvehicles.Meanwhile,astereovisionsystem isappliedtodetectanyprecedingvehicleandtriggertheautonomous overtakingmanoeuvre.Furthermore,amathematicalmodelandadap- tivecontrollerforautonomousovertakingmaneuverispresentedin[9]. Especially, anadaptive controlschemeis designedtoallowtracking thedesiredtrajectorieswithunknownvelocityoftheovertakenvehicle comparedtopreviouswork.Theauthorsof[31]proposedanpathplan- ningschemefortheself-drivingcarunderthecomplexenvironments.
Itmainlyconsistsofthreeparts,respectivelyasthenovelpathrepre- sentation,thecollisiondetectionandthepathmodification.Finally,a multiple-goalreinforcementlearningframeworkisconstructedtotackle multiplecriteriaforovertakingin[12].Simulationresultsdemonstrate thehighefficiencyoftheproposedstrategy.
3. Preliminaries
Inthis section,we presentthemotivationbehindECASSandthe problemstatement.
3.1. Motivation
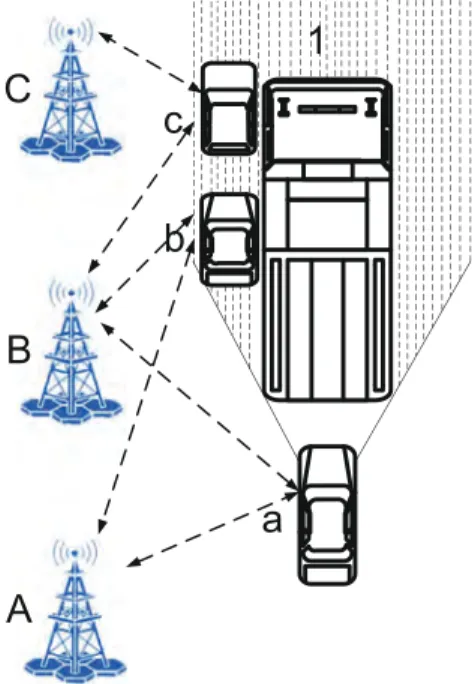
Nowadays,thetrafficconditionbecomesincreasinglycomplicatedin metropolises.Therefore,thereexistseveralcriticalchallengesforself- drivingvehiclestodealwithvariouskindsoftrafficscenarios.Forexam- ple,theself-drivingvehiclecanbeeasilyblockedbythetruckorbusin frontorbehind,asshowninFig.1,inwhichcasetheself-drivingvehi- cleistravellingbehindthetruck.Then,theradarorcameramountedon thetopoftheself-drivingvehiclecannotdetectandlocateanyobstacle inregion1,duetobeblockedbythetruckinfront.
Fig.1. Thescenariowhentheself-drivingvehicleisblocked.
Consequently,theself-drivingvehiclecannotdeterminethetravel- lingstateforthenextmomentbecauseitcannotaccuratelyperceivethe surroundingenvironment.Thetraditionalstrategythatself-drivingve- hiclesadoptistofollowthetruckorbusinfrontatareducedspeed.
Therefore,thismechanismwillincurmuchmoretimeconsumptionand trafficcongestion,thusresultinginmorepollution.
3.2. Problemstatement
Inrecentyears,edgecomputinghasbeenproposedtoprovidefaster networkresponseandmoresafetyguaranteeusingtheopenplatform integratedwithnetworking,computing,storageandapplicationclose toobjectsordatasources,comparedtodatacenterbasedcomputing [32].Inthispaper,wecombineself-drivingvehicleswithedgecomput- ingtoaccuratelylocatevehiclesneartheself-drivingvehicleincaseof obstruction.
Inself-drivingvehicles,onesecondisdividedintontimeslots.For eachslot,theself-drivingvehiclewillexecuteinstructionsfromvehi- clecontrollers,toensurethetravellingsafety.Assumingattimet,the self-drivingvehiclewaitsforthedrivingstateinstructionforthenext moment–𝑡+1∕𝑛.Then,thevehiclecontrollerwilldeterminethetrav- ellingstateforthenextmomentaccordingtotheacquiredlocalization information.
Asin Fig.1, theself-driving vehicle, referred toas vehiclea, is blockedbythetruckinfront.Althoughequippedwiththecameraand radar,theself-drivingvehiclestillcannotdetectandlocatevehiclesb andcontheleftsideofthetruck.Theroadsideinfrastructurelikeservers areproposed toassistvehicleatodetectandlocatevehicles bandc throughinformationinteraction.Accordingtotheseacquiredinforma- tion,theself-drivingvehicleacandeterminethedrivingstateforthe nextmoment.
Toaccuratelylocatevehiclesneartheself-drivingvehicle,GPSlo- calizationinformationandwirelesssignalsfromvehicleswillbedeliv- eredtonearbyservers. Accordingtothewireless signalinformation, theservercanobtaintheangleofarrival(AOA)relativetothevehicle [33].Inthepresenceofobstruction,anaccuratevehiclelocalizational- gorithmforself-drivingvehiclescanbedevelopedbasedonthefusionof GPSlocalizationandAOAinformation.Assumingthetruelocationfor vehiclebisbt,xandbt,y,themeasuredpositionbm,xandbm,ybasedon thedesignedvehiclelocalizationalgorithmshouldsatisfytheformula asbelow.
min (√
(𝑏𝑡,𝑥−𝑏𝑚,𝑥)2+(𝑏𝑡,𝑦−𝑏𝑚,𝑦)2 )
. (1)
4. Systemdesign
TheframeworkofECASSisshowninFig.2.Inthissection,thework- flowofECASSispresented,followedbytheintroductionofvehiclelo- calizationalgorithm.Finally,wepresenttheselectionschemeofservers neartheself-drivingvehicle.
4.1. Systemoverview
Intheproposedsystem,everyself-drivingvehicleisintegratedwith GPSandonewirelessantennasuchasWiFiantennaorDSRCantenna.
The GPS localization informationof vehicles is delivered to nearby serversthroughwirelesscommunication.Thewirelessantenna inve- hicleaisreferredtoasAna.Anawillselecttwonearbyserverstocom- municatewith,soastoaccuratelylocatevehiclea. Theworkflow of ECASSispresentedasfollows,asshowninFig.3.
Iftheself-drivingvehiclecanaccuratelysensethesurroundingen- vironmentaccordingtothetrafficconditionobtainedfromthecamera, radar,andIMU,thenitplansthedrivingstatebasedonthedecision algorithm.Otherwise,itwillsendarequesttoroadsideseversforob- tainingnearbyvehiclelocation.Subsequently,thesenearbyserverswill estimatethevehicle’slocationnear theself-drivingvehicleusingthe
Fig.2. TheframeworkofECASS.
Fig.3.TheworkflowofECASS.
designedinformationfusionalgorithm.Theself-drivingvehiclewillre- ceivenearbyvehicles’locationinformationfromtheseservers.Finally, itcandeterminewhethertoovertake,decelerate,oracceleratebasedon theobtainedlocalizationinformation.
Wefocusonthelocationmeasurementofvehiclesontheserverside, which isbasedon thefusionof GPSandwireless signalinformation transmittedfromvehicles.Therefore,thetimeoverheadcanalsobecut down sincethevehiclelocationestimationisexecutedontheserver side.Inthispaper,wecallitthevehiclelocalizationalgorithm.
4.2. Designofthevehicledetectionalgorithm
Toaccuratelylocatevehiclesintheblockedareafortheself-driving vehicle,edgecomputingbasedontheroadsideinfrastructureisutilized.
AsshowninFig.4(a),thewirelessantennaAnbonvehiclebcommuni- cateswithtwonearbyserversBandCsimultaneously.Vehiclebdelivers itsownGPSlocalizationinformationtonearbyserversBandC.Specif- ically,serverscanharnesstheincomingwirelesssignalstoderivethe
(a) (b)
Fig.4. Communicationbetweenthevehicleandservers.
AOA[34].Ontheserverside,thelocationandAOAinformationcanbe fusedtoimprovethelocalizationaccuracyofvehiclebaccordingtothe designedlocalizationalgorithm.Meanwhile,serverswilltransmittheir ownlocationinformationandIDstovehicleb,basedonwhichitcan realizetheselectionofnearbyservers.
Foreaseofunderstanding,Fig.4(a)canbeabstractedintoFig.4(b).
InFig.4(b),pointsBandCrepresentserverBandC,respectively.The wirelessantennaAnbisplacedatpointD.Theconnectionlinebetween pointsBandCissetastheYaxis.Andthelineperpendiculartotheline BCissetastheXaxis.bxandbyrepresenttheabscissaandordinateof theantennaAnb.Theselocalizationinformationcanbeobtainedfrom GPSembeddedinthevehicle.Meanwhile,thecoordinatesofserverB aredenotedasbB,xandbB,y,whilebC,xandbC,yarethecoordinatesof serverC.Thedistancebetweentwoserversissettod.
Weconsiderthescenariothatthewireless antennacommunicates withtwonearbyservers.Specifically,AnbtransmitstheGPSlocalization informationbxandbytoserversBandC.Therefore,ageometrictriangle
△BCDcanbeestablished,asshowninFig.4(b).AssumingthattheAOA fromDtoBis𝛼 andtheAOAfromDtoCis𝜃 accordingtothereceived wirelesssignals,thenthefollowingequationcanbeestablished.
𝑑𝐵𝐷× sin(𝜋 −𝛼)=𝑑𝐶𝐷× sin(𝜃), (2)
wheredBDrepresentthelengthoflinesegmentBD,anddCDdenotethe lengthoflinesegmentCD.Thisequationcanbeformulatedasbelow.
√
(𝑏𝑥−𝑏𝐵,𝑥)2+(𝑏𝑦−𝑏𝐵,𝑦)2× sin(𝜋 −𝛼)
=
√
(𝑏𝑥−𝑏𝐶,𝑥)2+(𝑏𝑦−𝑏𝐶,𝑦)2× sin(𝜃). (3) Inthemeantime,thefollowingequationcanalsobeestablishedac- cordingtothelawofcosines.
2× cos(𝛼 −𝜃)×
√
(𝑏𝑥−𝑏𝐵,𝑥)2+(𝑏𝑦−𝑏𝐵,𝑦)2×
√
(𝑏𝑥−𝑏𝐶,𝑥)2+(𝑏𝑦−𝑏𝐶,𝑦)2=(𝑏𝑥−𝑏𝐵,𝑥)2+(𝑏𝑦−𝑏𝐵,𝑦)2+ (𝑏𝑥−𝑏𝐶,𝑥)2+(𝑏𝑦−𝑏𝐶,𝑦)2−𝑑2.
(4)
Finally,wecanalsogetanotherequation:Thesumofthelengthof linesegmentBEandthelengthoflinesegmentCEisequaltothelength oflinesegmentBC,whichcanbeformulatedas:
√(𝑏𝑥−𝑏𝐶,𝑥)2+(𝑏𝑦−𝑏𝑏𝐶,𝑦)2× cos(𝜃)+
√
(𝑏𝑥−𝑏𝐵,𝑥)2+(𝑏𝑦−𝑏𝐵,𝑦)2× cos(𝜋 −𝛼)=𝑑. (5) Theseequations holdwhentheGPS basedlocalizationandAOAs areaccurate.However,asmentionedabove,evenmap-matchingbased GPSlocalizationsuffersfrommetersoferrors.Theerrorofmeasured AOAsareat alevelof severaldegrees. Therefore,thereexists agap betweenthelengthoflinesegmentBCandthesumofthelengthofline segmentBEandthelengthoflinesegmentCE.Theaimofthedesigned localizationalgorithminECASSistominimizethegapbetweenthese twovalues,whichcanbeformulatedas:
min (√
(𝑏𝑥−𝑏𝑏𝐶,𝑥)2+(𝑏𝑦−𝑏𝐶,𝑦)2× cos(𝜃) +√
(𝑏𝑥−𝑏𝐵,𝑥)2+(𝑏𝑦−𝑏𝐵,𝑦)2× cos(𝜋 −𝛼)−𝑑)
. (6)
Thereexistsomeconstraintsontheoptimizationproblem.Firstly, Eqs.3and4shouldbesatisfiedatthesametime.Secondly,𝜃 shouldbe largerthan0,yetsmallerthan𝜋/2.Inconclusion,theoptimizationisre- latedtotheantennaAnbmountedonthevehicleb,andtheoptimization problemcanbeconvertedinto:
min (√
(𝑏𝑥−𝑏𝐵,𝑥)2+(𝑏𝑦−𝑏𝐵,𝑦)2×𝑐𝑜𝑠(𝜋 −𝛼)+
√
(𝑏𝑥−𝑏𝐶,𝑥)2+(𝑏𝑦−𝑏𝐶,𝑦)2×𝑐𝑜𝑠(𝜃)−𝑑) , 𝑠.𝑡.
2×𝑐𝑜𝑠(𝛼 −𝜃)×
√
(𝑏𝑥−𝑏𝑏𝐵,𝑥)2+(𝑏𝑦−𝑏𝐵,𝑦)2×
√
(𝑏𝑥−𝑏𝐶,𝑥)2+(𝑏𝑦−𝑏𝐶,𝑦)2=(𝑏𝑥−𝑏𝐵,𝑥)2+(𝑏𝑦−𝑏𝐵,𝑦)2+ (𝑏𝑥−𝑏𝐶,𝑥)2+(𝑏𝑦−𝑏𝐶,𝑦)2−𝑑2,
√
(𝑏𝑥−𝑏𝐵,𝑥)2+(𝑏𝑦−𝑏𝐵,𝑦)2×𝑠𝑖𝑛(𝜋 −𝛼)
=
√
(𝑏𝑥−𝑏𝐶,𝑥)2+(𝑏𝑦−𝑏𝐶,𝑦)2×𝑠𝑖𝑛(𝜃),
0≤𝛼 −𝜃 ≤𝜋, 𝜋∕2≤𝛼 ≤𝜋, 0≤𝜃 ≤𝜋∕2,
𝑑𝐿,𝑆≤𝑏𝑥≤𝑑𝐿,𝑠+𝐵𝑤, 0≤𝑏𝑦,
whereBw representsthewidthof theroad,dL,S denotesthedistance betweentheserverandtheroad.Foreachrequest,theoptimizationop- erationisexecutedontheserversideonce,andthensendtheestimated vehiclelocationtotheself-drivingvehicle.Throughcollectingtheselo- calizationinformationfromnearbyservers,theself-drivingvehiclecan determineitsdrivingstatebasedonthedecisionstrategy.
4.3. Theselectionofnearbyservers
Theproposedsystemassumesthatnearbyserversareemployedto assisttheself-drivingvehiclerealizevehicledetectionandlocalization, andtheycancommunicatewitheachother.AsdesignedinSection4.2, twonearestserversonthesamesideareselectedastheassistantinfras- tructuretolocatethevehicleaccurately.Thisisbecausetheclosertothe vehicle,thestrongerwirelesssignalfromthevehiclecanbereceivedby servers.Further,itcontributestomoreaccurateAOAestimation.
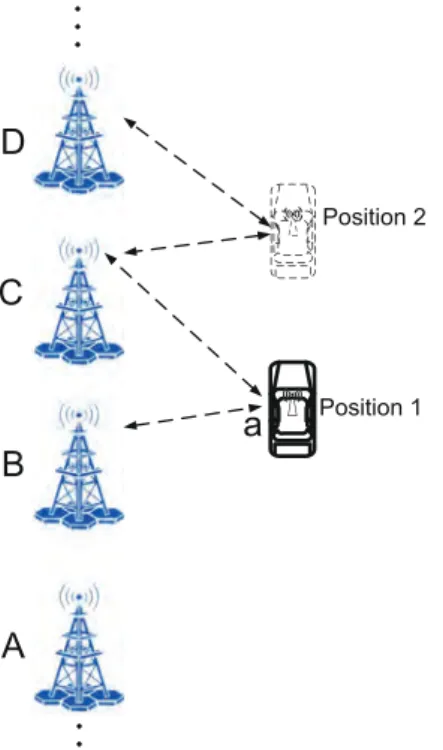
Asdemonstratedintheframework,servers,withinthecommunica- tioncoverageofself-drivingvehicles,willsendtheirinformationinclud- ingtheirIDandlocalizationtotheself-drivingvehicle.Subsequently, theself-drivingvehiclewillselecttwonearestserversonthesameside toassistaccuratevehiclelocalization.AsshowninFig.5,theantenna AnawillselectserversBandCsincetheyarethetwonearestservers whentheself-drivingvehicleisatposition1.Afteraperiodoftime, whenatposition2,serversCandDareselected.Detailedalgorithmfor theserverselectionaredemonstratedinAlgorithm1.
Fig.5. Thetravellingprocesswhenpassingthroughoneserver.
Algorithm1:Theserverselectionalgorithm.
input :(𝑥𝑣,𝑎,𝑦𝑣,𝑎):thepositionofvehicle𝑎;𝑆:thesetofservers thatareinthecommunicationrangeofthevehicle𝑎;𝑁:
Thenumberofserversinset𝑆;𝑆𝑖:server𝑖;(𝑥𝑠,𝑖,𝑦𝑠,𝑖):the positionofserver𝑖
output:𝑆𝑝𝑟𝑒:thesetofcommunicationbasestations
1 𝑑min←√
(𝑥𝑣,𝑎−𝑥(𝑠,1))2+(𝑦𝑣,𝑎−𝑦(𝑠,1))2;
2 𝑆𝑝𝑟𝑒←∅;
3 𝑚←0;
4 𝑘←0;
5 while(𝑗<𝑁)do
6 𝑑←√
(𝑥𝑣,𝑎−𝑥(𝑠,𝑗))2+(𝑦𝑣,𝑎−𝑦(𝑠,𝑗))2;
7 if(𝑑<𝑑min)then
8 𝑑min←𝑑;
9 𝑘←𝑚;
10 𝑚←𝑗;
11 𝑗←𝑗+1;
12 𝑆𝑝𝑟𝑒←𝑆𝑝𝑟𝑒∪𝑆𝑚;
13 𝑆𝑝𝑟𝑒←𝑆𝑝𝑟𝑒∪𝑆𝑘;
14 return𝑆𝑝𝑟𝑒;
5. Performanceevaluation
Extensivesimulationsareconductedtoverifythehighefficiencyof ECASS.
5.1. Simulationsettings
ThesimulationsaredevelopedbyMATLAB.AsshowninFig.6,there aretwolanesinthesamedirection.Eachlanewidthissetas3m.The distancebetweentwoadjacentserversalongtheroadissetas200m.
Thedistancefromtheservertothenearestlaneissetas10m.Vehicles travelalongtheXaxis.Therefore,thecoordinatesofthefirstservercan besetas(0,0),andthecoordinatesofthesecondservercanbesetas (200,0).
Fig.6.Thesettingsinthesimulations.
5.2. Simulationresults
Inthesimulationpart,weevaluateECASSwithvariousvelocities, differentGPSerrors,anddifferentnumberofvehicles.
5.2.1. Simulationwithvariousvelocities
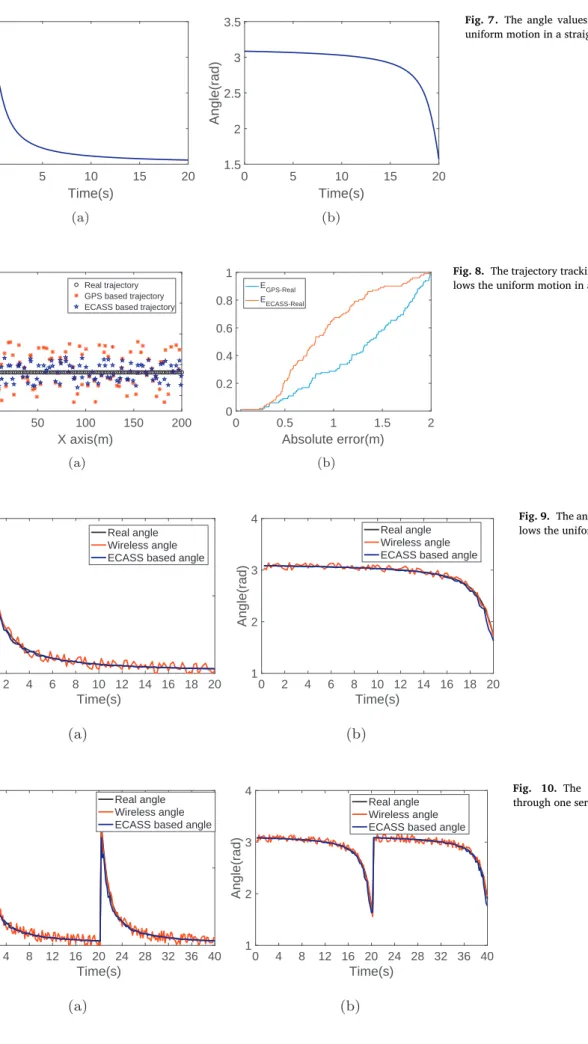
Firstofall,wemimicthescenarioofonlyonevehicletravellingat aconstantspeedof10m/s.Thevehiclemovesinastraightlineoflane 1.TheGPSlocalizationerrorissetwithin2m,andtheangleestimation errorbasedonwirelesssignalsissetwithin5°.Accordingtothevelocity, realAOAvaluesoftheantennarelatedtotwonearbyserversareequalto arctan(11.5/10t)and𝜋 −𝑎𝑟𝑐𝑡𝑎𝑛(11.5∕(200−10𝑡)),asshowninFig.7(a) and(b),respectively.
Thesimulationresults aboutthetrajectorytracking areshownin Fig.8(a).Obviously,ECASSbasedtrajectory trackingisclosertothe vehiclerealtrajectorythanGPSbasedtrajectory.
The absolute error between ECASS based positionandreal posi- tion is equal to √
(𝑏𝑡,𝑥−𝑏𝑚,𝑥)2+(𝑏𝑡,𝑦−𝑏𝑚,𝑦)2 for vehicle b, and the absolute error between GPS position and real position is equal to
√
(𝑏𝑡,𝑥−𝑏𝑥)2+(𝑏𝑡,𝑦−𝑏𝑦)2.Thesetwokindofabsoluteerrorsarereferred toas𝐸𝐸𝐶𝐴𝑆𝑆−𝑅𝑒𝑎𝑙and𝐸𝐺𝑃 𝑆−𝑅𝑒𝑎𝑙,respectively.
TheCDFof𝐸𝐸𝐶𝐴𝑆𝑆−𝑅𝑒𝑎𝑙and𝐸𝐺𝑃 𝑆−𝑅𝑒𝑎𝑙alongthetrajectoryisplot- tedinFig.8(b).Fromthisfigure,itcanbeobservedthattheabsolute localizationerrorsbasedonECASSaresmallerthanthatbasedonGPS.
WhentheGPSlocalizationerrors aresetwithin2m,themeanabso- luteerrorbetweenECASSbasedpositionandrealpositionisabout1m, whichis0.4mlessthanthatbetweenGPSbasedpositionandrealpo- sition.Consequently,itverifiesthehighlocalizationaccuracyof the proposedalgorithm.
Withregardtotheangleestimation,thesimulationresultsareplot- tedinFig.9(a)and(b),fortheAOAbetweenthevehiclewiththeserver behind,andtheAOAbetweenthevehicleandthefrontserver,respec- tively.BothfiguresverifythatECASSbasedanglesaremuchcloserto therealanglesandremainmuchstablerthantheestimatedanglesbased onwirelesssignals.
In the meantime, we also investigate the angle values based on the serverselectionscheme whenpassingthrough oneserver in the travellingprocess.ThesimulationresultsareshowninFig.10(a)and (b).ItclearlydemonstratesthatthemeasuredanglesbasedonECASS can tracktherealanglemuchmore accuratelycomparedtowireless signalbasedanglesalongthetrajectory.Evenwhenthevehiclepasses throughoneserver,ECASSbasedangleestimationisstillmuchmore accurate.
Abovesimulationsarebasedontheconstantvelocity,whichcannot besatisfiedinmostactualscenarios.Therefore,weinvestigatethesce- nariothatthevehiclevelocitychangesovertime.Thesetvelocitiesare showninFig.11(a)and(b),respectively,inwhichthehighestspeedof thevehicleislimitedto20m/s.Asshownintheleftfigure,thevehicle
0 5 10 15 20 Time(s)
0 0.5 1 1.5 2
Angle(rad)
(a)
0 5 10 15 20
Time(s) 1.5
2 2.5 3 3.5
Angle(rad)
(b)
Fig.7. Theanglevalueswhenthevehiclefollowsthe uniformmotioninastraightline.
0 50 100 150 200
X axis(m) 10
12 14 16 18
Y axis(m)
Real trajectory GPS based trajectory ECASS based trajectory
(a)
0 0.5 1 1.5 2
Absolute error(m) 0
0.2 0.4 0.6 0.8 1
EGPS-Real EECASS-Real
(b)
Fig.8.Thetrajectorytrackingresultswhenthevehiclefol- lowstheuniformmotioninastraightline.
0 2 4 6 8 10 12 14 16 18 20 Time(s)
0 1 2
Angle(rad)
Real angle Wireless angle ECASS based angle
(a)
0 2 4 6 8 10 12 14 16 18 20 Time(s)
1 2 3 4
Angle(rad)
Real angle Wireless angle ECASS based angle
(b)
Fig.9. Theanglevalueswhenthevehiclefol- lowstheuniformmotioninastraightline.
0 4 8 12 16 20 24 28 32 36 40 Time(s)
0 1 2
Angle(rad)
Real angle Wireless angle ECASS based angle
(a)
0 4 8 12 16 20 24 28 32 36 40 Time(s)
1 2 3 4
Angle(rad)
Real angle Wireless angle ECASS based angle
(b)
Fig. 10. The angle values when passing throughoneserver.
0 2 4 6 8 10 12 14 16 18 Time(s)
9 10 11 12 13 14
Velocity(m/s)
(a)
0 2 4 6 8 10 12 14 16 18 Time(s)
0 20
Velocity(m/s)
(b)
Fig.11. Thesetvelocity.
0 50 100 150 200
X axis(m) 10
12 14 16
Y axis(m)
Real trajectory GPS based trajectory ECASS based trajectory
(a)
0 0.5 1 1.5 2
Absolute error(m) 0
0.2 0.4 0.6 0.8 1
EGPS-Real EECASS-Real
(b)
Fig.12. Thetrajectorytrackingwhentravellingwiththeuni- formaccelerationmotion.
0 2 4 6 8 10 12 14 16 18 Time(s)
0 1 2
Angle(rad)
Real angle Wireless angle ECASS based angle
(a)
0 2 4 6 8 10 12 14 16 18 Time(s)
1 2 3 4
Angle(rad)
Real angle Wireless angle ECASS based angle
(b)
Fig. 13. The angle values when travelling withtheuniformaccelerationmotion.
followstheuniformaccelerationmotion,andthevelocityintheright figureisirregular,whichisclosertorealisticscenarios.
ThesimulationresultsareplottedinFig.12(a)and(b).ECASSbased vehicletrajectory showsasuperiorperformancein termsofboththe trajectorytrackingandabsoluteerrorcomparedtothosebasedonGPS information.Inthemeantime,themeanabsoluteerrorbasedonECASS remainsabout0.4mlessthanthatbasedonGPS.
TheangleestimationisshowninFig.13(a)and(b).Wecanobserve thatECASSbasedanglemeasurementsnearlymatchwiththerealan- gles,whileanglesestimatedbasedonwirelesssignalsfluctuateinalarge range.
Finally, we carry out simulations based on the velocity set in Fig.11(b).Thesimulationresults shownin Fig.14(a)and(b)verify thatECASSbasedtrajectoryismoreaccuratethanGPSbasedtrajectory evenwhenthevehiclevelocityisirregular.
Therefore,itcanbeconcludedthatwhentheGPSlocalizationerror issetwithin2m,ECASSbasedtrajectorytrackingshowsasuperiorper-
formancecomparedtoGPSbasedtrajectorydespiteofvariousvehicle speeds.
5.2.2. SimulationwithdifferentGPSerrors
AbovesimulationsarecarriedoutwiththeGPSlocalizationerrorset within2m.Inthissubsection,wewillexplorethesimulationscenario withdifferentGPSlocalizationerrorssincetheGPSlocalizationaccu- racycanbeinfluencedbydifferentfactors,suchastherefractioneffect causedbyionosphereandmultipatheffect.
Firstly,wesettheGPSlocalizationerrorwithin6m.Fig.15(a)and (b)demonstratethesimulationresultsintermsofthelocalizationaccu- racy.ECASSbasedtrajectoryismuchclosertotherealtrajectorycom- paredtothatbasedonGPS.Themeanabsoluteerroris2mlessthan thatbasedonGPS.
TheanglemeasurementsareshowninFig.16(a)and(b).Bothtwo AOAsbasedonECASSshowanaccurateestimationandstableperfor-
0 50 100 150 200 X axis(m)
10 12 14 16
Y axis(m)
Real trajectory GPS based trajectory ECASS based trajectory
(a)
0 0.5 1 1.5 2
Absolute error(m) 0
0.2 0.4 0.6 0.8 1
EGPS-Real EECASS-Real
(b)
Fig.14. Thetrajectorytrackingwhentravellingwithirregular velocities.
0 50 100 150 200
X axis(m) 5
10 15 20 25
Y axis(m)
Real trajectory GPS based trajectory ECASS based trajectory
(a)
0 2 4 6
Absolute error(m) 0
0.2 0.4 0.6 0.8 1
EGPS-Real EECASS-Real
(b)
Fig.15. ThetrajectorytrackingwhentheGPSerrorisset within6m.
0 2 4 6 8 10 12 14 16 18 20 Time(s)
0 1 2
Angle(rad)
Real angle Wireless angle ECASS based angle
(a)
0 2 4 6 8 10 12 14 16 18 20 Time(s)
1 2 3 4
Angle(rad)
Real angle Wireless angle ECASS based angle
(b)
Fig.16. TheanglevalueswhentheGPSerror issetwithin6m.
mancecomparedtotheestimatedAOAsbasedonwirelesssignalsduring thesimulationtime.
Finally,Fig.17(a)and(b)plotthetrackedtrajectorywhentheGPS localizationerror issetwithin10m.Thevehicletrajectorybased on ECASSshowsamuchbetterperformancethanthetrajectorybasedon GPS.Themeanabsoluteerrorbasedonthedesignedalgorithmisabout 3m,whichis4.1mlessthanthatbasedonGPS.
Finally, it is observed that the accuracy improvement based on ECASScanbeenhancedwithlargerGPSlocalizationerrors.Although themeanabsoluteerrorbasedonthedesignedalgorithmisabout3m whentheGPSerrorissetwithin10m.Wecanseethatthisrelatively largeerrorismainlycausedbythelocalizationerrorinXaxis.Incon- vention,thereshouldexistalargesafetydistancebetweentwonearby vehicles.Therefore,thesemuchsmallererrorsincomparisonwiththe safetydistancehaveasmallinfluenceonthedrivingstatedetermina- tion.Yet,thelargeGPSlocalizationerrorwillleadtowrongdetermina- tions.WecanconcludethatECASScanworkmoreefficientlywhenthe GPSerrorsbecomelarger.
5.2.3. Simulationwithtwovehicles
Inthesubsection,wewilldeploytwovehiclestodemonstratethe highefficiencyandrobustnessofECASS. Thevelocitiessetforthese twovehiclesareshowninFig.11(a)and(b).Inordertosimulatemore complexscenarios,vehicle1willchangethelaneinthe10secondwith theinitiallocationsetinlane2,whilevehicle2willchangethelane inthe4second.Theinitialpositionofvehicle1issetas(0,0),andthe initialpositionofvehicle2issetas(20,0).
Thesimulationresults forvehicle1areplotted inFig.18(a)and (b).ItclearlydemonstratesthatthetrajectorybasedonECASSperforms muchbetterthanGPSbasedtrajectory.Itcanbeseenthatthetrajec- torycanalsoaccuratelytracktherealtrajectoryevenwhenthevehicle changesitslaneinthetravellingprocess.
Thesimulationresultsoftheestimatedanglevaluesunderthesce- nariooftwovehiclesareshowninFig.19(a)and(b).Itverifiesthat ECASScanachieveahighaccuracyofAOAestimationevenwhenthe vehiclechangesitslane.
0 50 100 150 200 X axis(m)
0 10 20 30
Y axis(m)
Real trajectory GPS based trajectory ECASS based trajectory
(a)
0 2 4 6 8 10
Absolute error(m) 0
0.2 0.4 0.6 0.8 1
EGPS-Real EECASS-Real
(b)
Fig.17. ThetrajectorytrackingwhentheGPSerrorisset within10m.
0 50 100 150 200
X axis(m) 0
10 20 30
Y axis(m)
Real trajectory GPS based trajectory ECASS based trajectory
(a)
0 2 4 6 8 10
Absolute error(m) 0
0.2 0.4 0.6 0.8 1
EGPS-Real EECASS-Real
(b)
Fig.18. Thetrajectorytrackingwhensettingtwovehicles.
0 2 4 6 8 10 12 14 16 18 Time(s)
0 1 2
Angle(rad)
Real angle Wireless angle ECASS based angle
(a)
0 2 4 6 8 10 12 14 16 18 Time(s)
1 2 3 4
Angle(rad) Real angle
Wireless angle ECASS based angle
(b)
Fig.19. Theanglevalueswhendeployingtwo vehicles.
6. Conclusionandfuturework
Withtherapiddevelopmentoftheautopilottechnique,self-driving vehicles has attracted substantial attention from both industry and academia.Majorityofavailableliteraturehasfocusedonthehardware designsuchasvehicleborneradarandcamera,algorithmdesignre- latedtotheinformationfusion,andvehicletrajectoryplanning.How- ever,mosttrajectoryplanningalgorithmsarebasedontheassumption thatradar,camera,andIMUcanperceivetheenvironmentaroundthe self-drivingvehicle.Nevertheless,inrealtrafficscenesthevehiclemay beblockedbythetruckorbusaheadorbehind,theradarorcamerain- tegratedwithinthevehiclecannotsensethesurroundingenvironments accurately.Inaddition,GPSbasedlocalizationaccuracycannotensure thesafetyforautomaticdriving.
Therefore,wecombineself-drivingvehicleswithedgecomputingto realizenearbyvehicledetectionandlocalizationwhenself-drivingvehi- clesarepartiallyorevencompletelyblockedbytrucksorbuses.Lever- agingtheroadsideinfrastructure,accuratevehiclelocalizationnearthe
self-drivingvehiclecanbeachieved.Theseinformationwillbedelivered totheself-drivingvehicle,basedonwhichitcandeterminethedriving stateforthenextmoment.Extensivesimulationresultshaveverifiedthe highefficiencyoftheproposedsystem.
Althoughwehaveproposedanovelframeworkusingtheroadside infrastructuretolocatevehiclesintheproximityoftheself-drivingve- hicle,thereexistsomedeficiencies,whicharelistedasbelow.
• Efficient communicationstrategiesarenecessarytocut down the transmissiontimeconsumptionsincethetimecostplaysavitalrole inthereactionofautopilotsystem.
• Inthefuturework,thevehiclelocalizationalgorithmshouldbede- signedincombinationwiththetrajectoryplan,inordertodealwith variouskindsoftrafficconditions.
• Insteadofsimulations,realtraceexperimentsshouldbecarriedout totestthedesignedschemeinactualscenarios.
Acknowledgments
ThisworkispartlysupportedbyNationalKeyResearchandDevelop- mentProgramgrant2016YFE0100600andNSFC61672349,61672353, 61472252.
Supplementarymaterial
Supplementarymaterialassociatedwiththisarticlecanbefound,in theonlineversion,atdoi:10.1016/j.sysarc.2019.02.014.
References
[1] G.H. Lee , F. Faundorfer , M. Pollefeys , Motion estimation for self-driving cars with a generalized camera, in: in: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2013, pp. 2746–2753 .
[2] E. Ackerman , Lidar that will make self-driving cars affordable [news], IEEE Spectr.
53 (10) (2016) 14 .
[3] J. Carlson, Mapping large, in: Urban Environments with GPS-aided Slam.
[4] H. Xiong , L.N. Boyle , Drivers’ adaptation to adaptive cruise control: examination of automatic and manual braking, IEEE Trans. Intell. Transp. Syst. 13 (3) (2012) 1468–1473 .
[5] J.V. Mierlo , G. Maggetto , E.V. de Burgwal , R. Gense , Driving style and traffic mea- sures-influence on vehicle emissions and fuel consumption, Proc. Inst. Mech. Eng.
Part D 218 (1) (2004) 43–50 .
[6] R.W. Wolcott , R.M. Eustice , Visual localization within LIDAR maps for automated urban driving, in: in: International Conference on Intelligent Robots and Systems, IEEE, 2014, pp. 176–183 .
[7] M.A. Brubaker , A. Geiger , R. Urtasun , Lost! leveraging the crowd for probabilistic vi- sual self-localization, in: in: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2013, pp. 3057–3064 .
[8] J. Xing , H. Dai , Z. Yu , A distributed multi-level model with dynamic replacement for the storage of smart edge computing, J. Syst. Archit. 83 (2018) 1–11 . [9] P. Petrov , F. Nashashibi , Modeling and nonlinear adaptive control for autonomous
vehicle overtaking, IEEE Trans. Intell. Transp. Syst. 15 (4) (2014) 1643–1656 . [10] C.M. Sosa-Reyna , E. Tello-Leal , D. Lara-Alabazares , Methodology for the model–
driven development of service oriented IoT applications, J. Syst. Archit. 90 (2018) 15–22 .
[11] A. Houenou , P. Bonnifait , V. Cherfaoui , W. Yao , Vehicle trajectory prediction based on motion model and maneuver recognition, in: in: International Conference on Intelligent Robots and Systems, IEEE, 2013, pp. 4363–4369 .
[12] D.C.K. Ngai , N.H.C. Yung , A multiple-goal reinforcement learning method for com- plex vehicle overtaking maneuvers, IEEE Trans. Intell. Transp. Syst. 12 (2) (2011) 509–522 .
[13] E. Coelingh, S. Solyom, All aboard the robotic road train, IEEE Spectr. 49(11).
[14] M.A. Quddus , W.Y. Ochieng , R.B. Noland , Current map-matching algorithms for transport applications: state-of-the art and future research directions, Transp. Res.
Part C 15 (5) (2007) 312–328 .
[15] N.M. Drawil , H.M. Amar , O.A. Basir , et al. , GPS localization accuracy classification:
a context-based approach, IEEE Trans. Intell. Transp. Syst. 14 (1) (2013) 262–273 . [16] A.K.S. Rajan , A. Feucht , L. Gamer , I. Smaili , et al. , Hypervisor for consolidating
real-time automotive control units: its procedure, implications and hidden pitfalls, J. Syst. Archit. 82 (2018) 37–48 .
[17] T. Fanni , L. Li , T. Viitanen , C. Sau , R. Xie , F. Palumbo , L. Raffo , H. Huttunen , J. Takala , S.S. Bhattacharyya , Hardware design methodology using lightweight dataflow and its integration with low power techniques, J. Syst. Archit. 78 (2017) 15–29 .
[18] P. Pelliccione , E. Knauss , R. Heldal , S.M. Ågren , P. Mallozzi , A. Alminger , D. Bor- gentun , Automotive architecture framework: the experience of volvo cars, J. Syst.
Archit. 77 (2017) 83–100 .
[19] P. Falcone , F. Borrelli , J. Asgari , H.E. Tseng , D. Hrovat , Predictive active steering control for autonomous vehicle systems, IEEE Trans. Control Syst. Technol. 15 (3) (2007) 566–580 .
[20] Q. Li , N. Zheng , H. Cheng , Springrobot: a prototype autonomous vehicle and its algorithms for lane detection, IEEE Trans. Intell. Transp. Syst. 5 (4) (2004) 300–308 . [21] J. Ziegler , P. Bender , M. Schreiber , H. Lategahn , T. Strauss , C. Stiller , T. Dang , U. Franke , N. Appenrodt , C.G. Keller , et al. , Making bertha drive-an autonomous journey on a historic route, IEEE Intell. Transp. Syst. Mag. 6 (2) (2014) 8–20 . [22] N. Jeong , H. Hwang , E.T. Matson , Evaluation of low-cost LiDAR sensor for applica-
tion in indoor UAV navigation, in: in: Sensors Applications Symposium, IEEE, 2018, pp. 1–5 .
[23] L. Meier , P. Tanskanen , L. Heng , G.H. Lee , F. Fraundorfer , M. Pollefeys , PIXHAWK:
a micro aerial vehicle design for autonomous flight using onboard computer vision, Auton. Robots 33 (1–2) (2012) 21–39 .
[24] J. Wei , J.M. Snider , J. Kim , J.M. Dolan , R. Rajkumar , B. Litkouhi , Towards a viable autonomous driving research platform, in: in: Intelligent Vehicles Symposium, IEEE, 2013, pp. 763–770 .
[25] U. Franke , D. Pfeiffer , C. Rabe , C. Knoeppel , M. Enzweiler , F. Stein , R. Herrtwich , Making bertha see, in: in: Proceedings of the IEEE International Conference on Com- puter Vision Workshops, 2013, pp. 214–221 .
[26] S.J. Park , T.Y. Kim , S.M. Kang , K.H. Koo , A novel signal processing technique for vehicle detection radar, in: in: MTT-S International Microwave Symposium Digest, Vol. 1, IEEE, 2003, pp. 607–610 .
[27] G. Alessandretti , A. Broggi , P. Cerri , Vehicle and guard rail detection using radar and vision data fusion, IEEE Trans. Intell. Transp. Syst. 8 (1) (2007) 95–105 . [28] S.J. Anderson , S.C. Peters , T.E. Pilutti , K. Iagnemma , An optimal-control-based
framework for trajectory planning, threat assessment, and semi-autonomous con- trol of passenger vehicles in hazard avoidance scenarios, Int. J. Veh. Auton. Syst. 8 (2–4) (2010) 190–216 .
[29] S. Glaser , B. Vanholme , S. Mammar , D. Gruyer , L. Nouveliere , Maneuver-based tra- jectory planning for highly autonomous vehicles on real road with traffic and driver interaction, IEEE Trans. Intell. Transp. Syst. 11 (3) (2010) 589–606 .
[30] V. Milanés , D.F. Llorca , J. Villagrá, J. Pérez , C. Fernández , I. Parra , C. González , M.A. Sotelo , Intelligent automatic overtaking system using vision for vehicle detec- tion, Expert Syst. Appl. 39 (3) (2012) 3362–3373 .
[31] U. Lee , S. Yoon , H. Shim , P. Vasseur , C. Demonceaux , Local path planning in a complex environment for self-driving car, in: in: IEEE 4th Annual International Con- ference on Cyber Technology in Automation, Control, and Intelligent Systems, IEEE, 2014, pp. 445–450 .
[32] S. Sardellitti , G. Scutari , S. Barbarossa , Joint optimization of radio and computa- tional resources for multicell mobile-edge computing, IEEE Trans. Signal Inf. Pro- cess. Netw. 1 (2) (2015) 89–103 .
[33] C. Yang , H.R. Shao , WiFi-based indoor positioning, IEEE Commun. Mag. 53 (3) (2015) 150–157 .
[34] C. Chen , Y. Chen , Y. Han , H.Q. Lai , K.R. Liu , Achieving centimeter-accuracy indoor localization on wifi platforms: a frequency hopping approach, IEEE Internet Things J. 4 (1) (2017) 111–121 .
Xiong Wang received the B.S. degree in electronic informa- tion engineering from the Wuhan University of Science and Technology in 2013 and the master’s degree in information and communication engineering from the Huazhong Univer- sity of Science and Technology in 2016. He is currently pur- suing the Ph.D. degree with the Department of Computer Sci- ence and Engineering, Shanghai Jiao Tong University, China.
His research interests include wireless networks and mobile computing.
Tianpeng Wei is currently studying in Shanghai Jiao Tong University as a junior student. He majors in computer science.
Linghe Kong received the B.E. degree from Xidian Univer- sity in 2005, the Dipl.-Ing. degree from TELECOM SudParis in 2007, and the Ph.D. degree from Shanghai Jiao Tong Univer- sity in 2012. He was a Post-Doctoral Fellow with Columbia University and McGill University. He is currently a Research Professor with Shanghai Jiao Tong University, China. His re- search interests include wireless communications and mobile computing.
Liang He is an assistant professor at University of Colorado Denver. His research mainly focuses on cyber-physical sys- tems, IoTs, and mobile computing. Before joining UCD, he worked as a research fellow at The University of Michigan at Ann Arbor, MI, USA, with Prof. Kang G. Shin, as a Research Scientist at Singapore University of Technology and Design, Singapore, with Dr. Yu (Jason) Gu, and as a research assistant at University of Victoria, Canada, with Prof. Jianping Pan. He is a senior member of IEEE and a member of ACM.
Fan Wu is a professor with the Department of Computer Sci- ence and Engineering, Shanghai Jiao Tong University. He re- ceived the BS degree in Computer Science from Nanjing Uni- versity, in 2004, and the PhD degree in Computer Science and Engineering from the State University of New York at Buffalo, in 2009. He has visited the University of Illinois at Urbana-Champaign (UIUC) as a Post Doc Research Associate.
His research interests include wireless networking and mobile computing, algorithmic game theory and its applications, and privacy preservation. He has published more than 100 peer- reviewed papers in technical journals and conference proceed- ings.
Guihai Chen received the B.S. degree from Nanjing University in 1984, the M.E. degree from Southeast University in 1987, and the Ph.D. degree from the University of Hong Kong in 1997. He is a Distinguished Professor with Shanghai Jiaotong University, China. He had been invited as a Visiting Professor for many universities, including the Kyushu Institute of Tech- nology, Japan, in 1998, the University of Queensland, Aus- tralia, in 2000, and Wayne State University, USA, from 2001 to 2003. He has a wide range of research interests with focus on sensor network, peer-to-peer computing, and high perfor- mance computer architecture.