Behavior-Aware Probabilistic Routing For Wireless Body Area Sensor Networks
Song Yang∗, Jia-Liang Lu∗‡, Fan Yang∗, Linghe Kong∗§, Wei Shu∗† and Min-You Wu∗
∗Dept. of Computer Science & Engineering, Shanghai JiaoTong University, Shanghai, China
†Dept. of Electrical & Computer Engineering, University of New Mexico, USA
‡Universite de Lyon, INSA-Lyon, CITI, INRIA Socrate, F-69621, Villeurbanne, France
§Singapore University of Technology and Design, Singapore
Email: {umarth, jialiang.lu, xcyangfan, linghe.kong, mwu}@sjtu.edu.cn, [email protected]
Abstract—Recent advances in wireless communication and electronic manufacture have enabled a variety of sensors to be used for Wireless Body Area Networks (WBANs), which can provide real-time body monitoring and feedback for enabling patient diagnostics procedure, rehabilitation, sports training and interactive performance. However, existing single-hop wireless communication scheme faces several major challenges: rapid growth of channel conflicts as more sensors added, impermeabil- ity of human body to radio waves and highly dynamic network topology due to human movements. In this paper, a prototype of multi-hop WBAN has been built to quantify the channel conflict and to characterise the network connectivity during human motions. A probability based routing protocol fusing inertial sensor data and history link quality is then developed, which aims at capturing the high spatio-temporal change of network topology on the selection of a reliable relay node in WBAN routing. The performance of the protocol is experimentally evaluated on our prototype system. Compared with a number of existing routings, the proposed scheme is more splendid in terms of average delivery ratio, number of hops and end-to-end delay.
I. INTRODUCTION
Wearable sensors are deployed on/in human bodies to monitor human’s physiological signals or to detect human’s movements. The collected information is transmitted back to a gateway device (connects to the Internet), which identifies the situations and may trigger some necessary responses (i.e., calling for an ambulance). These sensors and the gateway are networked together through the wireless channel to form a Wireless Body Area Network (WBAN). This supporting technique can help in patient diagnostics, sport-training and interactive games [1], [2].
The major challenge of WBAN is to ensure that communi- cations between sensor nodes and the gateway are reliable.
Besides the usual obstacles in wireless communication, it needs to contend with the high attenuation through or around the human body at frequencies commonly used for WBANs (433 MHz, 2.4GHz, etc.). Furthermore, the movement of human body leads to highly dynamic network topology which affects wireless communication significantly. However, current wireless technologies and networking protocols usually fail to cope with these hot potatoes.
The experimentations in [1], [3] show that the temporal and spatial separation of motion features can help to quantify
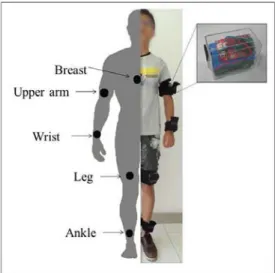
Fig. 1. The prototype of WBAN and the placement of sensor nodes
the activities being observed and to guide the in-network processing. But they also confirm that the current channel bandwidth cannot support high frequency capture-activities with multiple sensors placed on the body within one-hop range.
Therefore the multi-hop communication is necessary to cover the entire body. In [4], postural body movement gives rise to frequent network partitioning, resulting in Delay Tolerant Network (DTN). A probabilistic packet routing framework is then developed using a stochastic link cost to achieve a better performance. However the scale of delay is order of magnitude in several seconds, which does not meet the requirements of real-time applications.
As one of the main properties of WBAN, the rapid topol- ogy changes lead to the unreliability of the communications between on-body sensor nodes. Furthermore, in real-time in- formation processing applications, the data should be delivered with very short delay. All above make WBAN application face serious challenge with limited resource shared. The com- munication should be elaborately scheduled as the link state instability, which is seriously affected by the human postural body movement.
In this paper, a prototype of multi-hop WBAN for motivat-
10 20 30 40 50 0.4
0.6 0.8 1.0
Average Delivery Rate
Transmitting Frequency (Hz) Single-Hop Multi-Hop
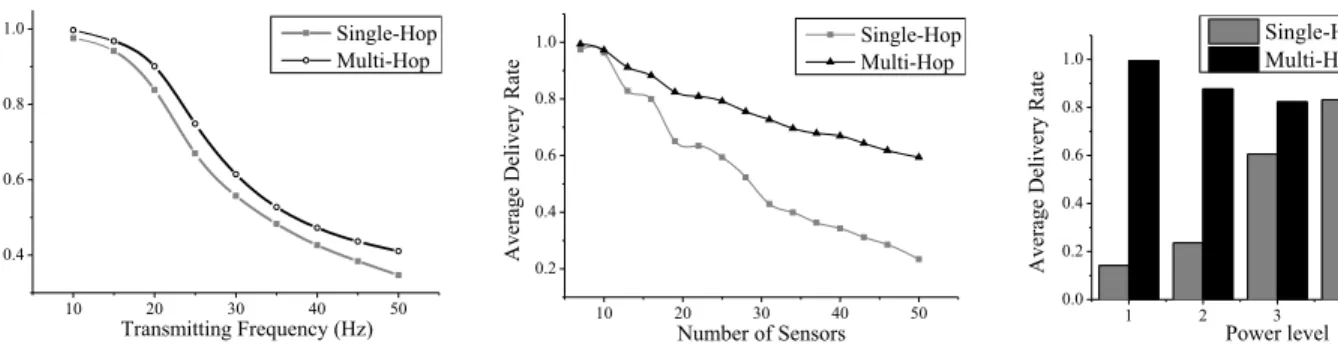
Fig. 2. Average delivery rate in different sample frequency
10 20 30 40 50
0.2 0.4 0.6 0.8 1.0
Average Delivery Rate
Number of Sensors
Single-Hop Multi-Hop
Fig. 3. Average delivery rate with different number of sensors
1 2 3 4 5
0.0 0.2 0.4 0.6 0.8 1.0
Average Delivery Rate
Power level Single-Hop Multi-Hop
Fig. 4. Average delivery rate under different transmit power level
ing the on-body packet routing problem is developed, as shown in Fig. 1. Through experimentations, it discovers that multi- hop routing rather than single-hop is more beneficial to WBAN in terms of delivery rate and energy consumption. Moreover, it is more robust when the number of sensors increases. In the meantime, instantaneous inertial information can contribute to the discovery of topology localities in a WBAN; hence can improve the efficiency of the next-hop selection process in multi-hop routing.
Specific contributions of the paper are as follows. First, using the prototype network, we (i) contrast multi-hop with single-hop to testify the advantage of multi-hop for WBAN;
(ii) develop a detailed link state characterization mechanism in order to demonstrate the network topology localities caused by human postural body movement. Second, a behavior-aware probabilistic routing protocol incorporating instantaneous in- ertial information is then developed. Finally, the results of real-trace driven simulation show our approach outperforms the existing probabilistic and deterministic routing protocols on both the end-to-end packet delay and delivery ratio in a dynamic WBAN environment.
II. RELATEDWORK
Many WBAN implementations have recently been intro- duced in the literature [1], [3], [2], [5], [6], [7]. A number of them focus on bio-motion capture and analysis. In [1] and [3], prototype systems with wireless inertial sensing devices are built for improved scalability, speed, distributed measurement, and interpretation of group interactions motion tracking. While [2], [5], [6] mainly focus on the analysis of sports training (golf, swimming and Canoeing) with WBANs.
One main constraint of WBAN is that all radio links exhibit high shadowing variations due to the human body motion. To address the communication reliability, time resource allocation approach is used. Due to the time-varying nature of the WBAN channel and the strong shadowing effect of the body, the network topology is not stable over time, thus the classical star- like topology does not work well. [8] addresses relaying under such topology variability. Increasing transmission power is not a good approach for WBANs, because it not only generates stronger interference and higher power consumption, but also
fails to meet the health requirement. Opportunistic relaying and cooperative mechanisms represent appealing alternatives to increasing transmission power [9], [10], which allow to exploit the full diversity of the WBAN channel. This also im- plies the multi-hop routing on networking layer. Furthermore, better relay decisions can be made with full consideration of neighbour nodes’ attributes[11].
Although WBANs are deployed in a compact spatial region along the human body, multi-hop communication rather than single-hop is more preferable due to the higher path loss of RF signals through human body. Alternatively, high power radio frequency enforced throughout a large coverage area cannot be used in WBANs, because RF energy waves may heat and damage body tissue by energy absorption. Routing based on a tree structure is proposed in [12], but cannot be applied for topology partitioning leading to end-to-end physi- cal disconnection. In [4], [13], the authors apply DTN routing principal in WBANs to deal with topology partitioning (named as postural partitioning in the paper). A Link Likelihood Factor (LLF) is defined to represent the likelihood for a link to be connected during a discrete time slot. A probabilistic routing with link cost is then developed, in which a node decides to select a node to relay the packet only if the LLF of the relay node is higher than its. However, burst postural movements cannot be captured by such stochastic model, instead some probabilistic approaches should be adopted [14].
III. MOTIVATION
The partial system has been implemented in our previous work [15], where a WBAN experimental platform consisting of wireless on-body sensor nodes that based on IRIS motes was devised to communicate over IEEE 802.15.4. A Razor [16] Inertial Measurement Unit (IMU) sensor was connected with IRIS mote and a new power supply system was employed.
The placement of wireless sensor nodes on a human body is shown in Fig. 1. They are utilized to measure the connectivity to other nodes and gather inertial data on breast, upper arm, wrist, leg and ankle. For making a quantitative comparison of multi-hop with single-hop, we demonstrate two groups of experimental results in this section.
0 10 20 30 40 4
8 12 16 20 24
Number of paths
Time Slots
Direct links in each slot
Two-hop paths in two adjacent slots
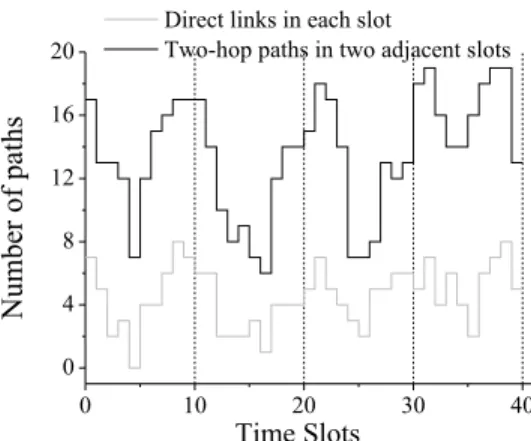
Fig. 5. The number of links in each slot and that of two-hop paths in two adjacent slots during walking
0 10 20 30 40
0 4 8 12 16 20
Number of paths
Time Slots
Direct links in each slot
Two-hop paths in two adjacent slots
Fig. 6. The number of links in each slot and that of two-hop paths in two adjacent slots during Running
A. Transmission Characteristic
In WBAN, two major metrics are widely adopted for evalua- tion, i.e., Delivery Ratio and Energy Consumption. In addition, when the sampling frequency increases or more sensors exist side by side in the applications like interactive environment, the robustness should be taken into consideration. With seven sensors set on breast, wrists, legs and ankles, three factors of the experiment are considered: the sampling frequency, the number of sensors and the transmission power. Also, there is a base station on waist to collect the sensor sample data.
Here, single-hop is defined as the sensor which communicates directly with the base station and the implementation of multi- hop is selected as Convergecast Tree Protocol (CTP) for convenience.
Fig. 2 indicates that the average delivery ratio of both single- hop and multi-hop decreases with the increasing sampling frequency. Although the difference is slightly small, multi-hop always outperforms single-hop. For further confirmation of the discrepancy, we subsequently add more sensors. It is illustrated in Fig. 3 that the gap grows obviously with the ascending number of sensor nodes. Therefore, as more diversified sensors are employed for individual WBAN or interactive applications, multi-hop is more suitable and robust in terms of the delivery ratio. Regarding the part of transmit power, IRIS, which uses RF230 as the wireless transceiver, is devised with sixteen levels (from the low level 1 to the high level 16). And the RF power varies from -17dBm to 3dBm [17]. But transmission can cover the entire body when the level is above 5. According to Fig. 4, when the delivery rate is about 99 percent, single-hop is on the level 5 while multi-hop is just on the level 1. After being converted to Watt, energy consumption of single-hop is three times higher than that of multi-hop. Consequently, the multi-hop routing is more efficient and energy-saving than the single-hop routing in WBAN.
B. Link Connectivity with Postural Movement
When doing connectivity experiments, a human subject fitted with five sensors repeats the posture sequence (walking
and running) during 10s. The frequency of link measurement is set to 10Hz. The direct link states are recorded on-the-fly, while multi-hop path states are processed off-line.
Fig. 5 and Fig. 6 give the statistical information of walking and running respectively. A periodicity can be observed during walking and running and the variation is more significant on the running. For a two-hop routing path, the adjacent links (sharing one node as a vertex) should be connected together in two consecutive time slots, of which the number is corresponding with the quantity of two-hop paths in the network. Some observations from Fig. 5 and Fig. 6 can be obtained: (i) the number of two-hop paths is much greater than the number of single-hop links. (ii) Exploiting spatial diversity is benefit for both walking and running. The impact seems to be of the same order. (iii) The temporal variation of the two- hop paths remains significant. Therefore, the selection of relay node should take into account the instantaneous and periodical temporal variation of the topology.
The above observations straightforwardly motivate the ne- cessity of establishing the multi-hop routing mechanism in WBANs. To deal with topology dynamics during postural movement, it is essential for us to employ techniques to exploit spatial diversity. Meanwhile, instantaneous and periodical tem- poral variation of the topology should be equally taken care of.
IV. ROUTING INWBANS
In this section, we discuss three WBAN routing protocols in the literature before developing our proposition, which lever- ages instantaneous topology changes with inertial information and periodical topology localities by historical probabilistic model.
A. On-body Flooding Routing (OFR)
Flooding approach is an extreme way to fully exploit the space diversity in a routing process. With flooding, multiple copies of a packet from a source node can reach the destination through multiple paths, and the first arrived copy at the destination indicates the minimum end-to-end delay. However,
due to its inherent flooding nature, it is not efficient in terms of the number of efficacious messages and transmission energy cost.
B. DTN Opportunistic Routing (DOR)
Delay Tolerant Network (DTN) opportunistic routing [18]
presents an opposite approach to flooding routing. In DTN opportunistic routing, a source node delivers packets to the destination node only when a direct link is possible between two nodes. The packet will be stored in a buffer before two nodes come into a communication range. Therefore, no spatial diversity is used, which could result in a very large delay for distanced pair of nodes. Some pairs of nodes could even have no chance to be directly connected, which will impact the delivery ratio of such routing protocol. However, this protocol is simple to implement and highly energy-efficient due to the single transmission for each packet.
C. Probabilistic Routing with Postural Link Cost (PRPLC) In [4], a historical postural link cost is defined as Link Likelihood Factor (LLF) Pi,jt . Pi,jt is a factor between 0 and 1 that represents the likelihood for the link Li,jto be connected during a time slot t. The LLF is a weighted function of the two possible link states (connected and disconnected), and has the following form:
Pi,jt = Pi,jt−1+ (1 − Pi,jt−1) · ωti,j if Li,j is connected Pi,jt = Pi,jt−1· ωi,jt otherwise (1) where ωi,jt is the average value of Li,j over a time window Twindow before the time slot t. ωi,jt is high when the link state is good, with which Pi,jt increases fast and decreases slowly, and vice versa.
Based on the assumption that each on-body sensor node observes and maintains its LLF to be in direct connect with all other nodes in the network, a probabilistic routing protocol PRPLC is proposed. The routing philosophy is when a node i needs to forward a packet to the destination node d, and it meets a node j, the packet is forwarded from node i to node j only if the condition Pi,dt < Pj,dt is true. In other words, a higher link likelihood of node j indicates that it is more likely to meet the node d than the node i does. That justifies the packet relayed by j will be delivered with a shorter delay.
D. Behavior-Aware Probabilistic Routing (BAPR)
The PRPLC proposed in [4] takes into account the temporal variation of topology with historical link statistics. The short and long term variation can be adjusted by time window Twindow. But one of the most important factors is neglected:
the current trends of the postural movement. Inertial sensors can easily gather real-time acceleration and orientation infor- mation. They can also help to detect a breaking point human behaviour, which has burst changes on the link state.
Motivated by incorporating low-cost inertial motion infor- mation into routing decision to be suitable for dynamic WBAN
environment, we propose a routing scheme, i.e., Behavior- Aware Probabilistic Routing (BAPR).
Each node disposes a routing table. And each record in the routing table is a 3-tuple hD, N, Ci, where the three elements denote Destination, NextHop and Connectivity-Cost, respec- tively. The Destination and NextHop correspond to destination node ID and next-hop node ID, while Connectivity-Cost is the link cost from the subjected node to the relay node. Different from MANET routing, for each destination, several records may exist. The idea of BAPR is to select the next-hop node with the highest connectivity cost to reduce packet loss. The effect of inertial information and topology localities are taken into account when designing the connectivity cost.
We try to weight the inertial information representing instan- taneous postural movement and historical topology localities representing long-term characteristic of a link in a function.
The guiding ideology is: when the topological locality is dynamic (i.e. varying rapidly over time), the instantaneous postural movement should be weighted higher; otherwise the historical link cost is more important. We assume that an acceleration vector Acc can be collected with the on-board~ inertial sensor. And the LLF Pi,jt proposed in PRPLC [4] is employed as historical link cost. The computation of the latter one follows equation (1).
Now, we need to find a metric to quantify the dynamism in topological locality around a node. We develop such metric based on the notion of entropy. For an arbitrary node i and its neighbor set S(i), the entropy of the local topology around i is defined as follows:
Ei= X
i,j∈S(i)
−p(i, j) log p(i, j) (2)
where p(i, j) is the probability that a direct link is found between i and j. The high entropy value means disorder;
hence, the locality is dynamic. Depending of the number of possible links in the locality, the entropy value range may change from one node to another. Therefore a normalized expression is used
E¯i= Ei
|S(i)| · e−1 (3)
Since the p(i, j) is from 0 to 1, the maximum number of
−p(i, j) log p(i, j) is e−1. So the max entropy of the locality of node i is |S(i)| · e−1.
The inertial information is mainly collected as accelerations, i.e. Acc. Presuming that the initial placements of on-body~ sensor nodes are known by all sensor nodes, each of them can be devoted to compute a vector ~Vi,j with respect to other sensor nodes. In real applications, the solitary message of relative orientation of the vector regarding the gravity system is enough, which makes our assumption practical.
To quantify the effect of instantaneous postural movement, we model it on a time slot t as:
P Mi,jt = ˆAccti· ˆVi,jt (4)
where Accˆ ti and ˆVi,jt are the unit vectors of Acc~ ti and ~Vit respectively. In fact, the result of equation (4) equals to cos θ, where θ is the angle of the two vectors. Therefore, P Mi,jt is between 0 and 1, quantifying well whether the movement of node i will lead two nodes to be closer or not.
Based on the above formulation, we establish the connec- tivity cost as follows:
CCi,jt = Pi,jt · (1 − ¯Ei) + P Mi,jt · ¯Ei (5) In a routing process, a sensor node i needs to compute CCi,jt for all other nodes j in the neighbor set S(i) when it has a packet that should be sent to the destination node d. Once the connectivity costs are obtained, the node i finds the next- hop node with the highest connectivity cost, and forwards the packet to it. To avoid that the packet is lost because the node i is isolated in current time slot, CC to the selected node should be greater than a threshold value. Otherwise, i continues to store the packet in its own buffer until next time slot.
V. EXPERIMENTATIONS
In order to compare the performance of the proposed BAPR with other routing protocols in dynamic postural movement scenarios, we implement them on the five on-body sensor nodes in our WBAN platform as shown in Fig. 1. Packets originated from all on-body sensors nodes are routed to the common destination: node attached on breast. The frequency of packet transmission on source nodes is 10 packets/second.
The experiments are carried on a walking and a running scenario.
A. Performance Metrics
The performances of the routing protocols are evaluated using three metrics:
1) Average delivery ratio gives an average ratio of the suc- cessfully received packets over total generated packets.
2) Average end-to-end delay measures the average time duration for the first received packet transmit from the source node to the destination node.
3) Average number of hops measures the number of hops that all copies of the packet are transmitted by the source node as well as the relay nodes in total.
The primary target of WBAN routing is to maximize the packet delivery ratio as well as to minimize packet delay. The number of hops per packet is a factor relevant with resource utilization and energy consumption in a WBAN. The more the hops are, the lower resource utilization and the higher energy consumption are.
B. Performance Evaluation
We compare the performance of the routing protocols in a WBAN. Both walking and running scenarios are studied and average values are computed over each postural movement cycle (2s for walking and 1s for running).
1) Average delivery ratio: In Fig. 7, despite the single- path nature of BAPR, its average delivery ratio is comparable to OFR in walking. And it is 30% higher than PRPLC, which is an important improvement brought by the inertial motion assisted mechanism in walking. The selection of relay nodes appears more accurate if regarding the link connectivity.
We observe a decrease of delivery ratio in running scenario.
Nevertheless, it still outperforms PRPLC.
The DOR performs better in walking than in running, because fewer direct links can be found in the latter one.
This result also indicates that the DOR is not applicable on a dynamic WBAN, suffering from short-life links.
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Running Walking
OFR
DOR
PRPLC
BAPR
AverageDelivery Ratio
Fig. 7. Average Delivery Ratio
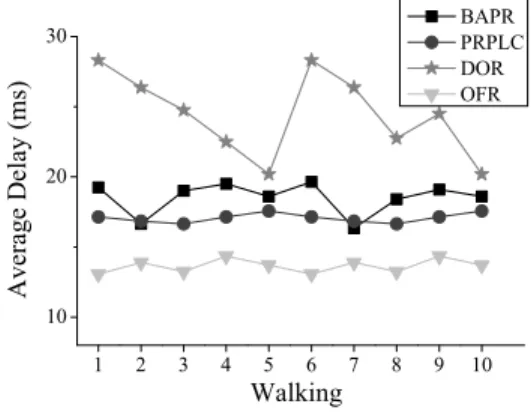
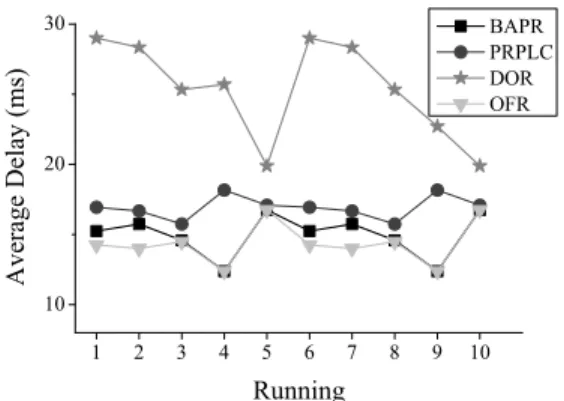
2) Average end-to-end delay: In both walking (Fig. 8) and running (Fig. 9), OFR, BAPR and PRPLC generate similar average end-to-end packet delay. If we consider that the OFR provides a lower bound of delay, the performances on BAPR and PRPLC are satisfactory enough. One might doubt how it could be possible that BAPR and PRPLC are even better than OFR in Fig. 9. The reason is that shorter paths are favorable by both routing process, and the packet transmitted through longer path happened to be lost that are not taken into account in the statistics. For DOR, we can clearly observe immense fluctuations.
1 2 3 4 5 6 7 8 9 10
10 20 30
Walking
BAPR
PRPLC
DOR
OFR
AverageDelay (ms)
Fig. 8. Average end-to-end delay (Walking)
3) Average number of hops: The OFR is not good at resource utilization at all, as shown in Fig. 10. The number
1 2 3 4 5 6 7 8 9 10 10
20 30
Running
BAPR
PRPLC
DOR
OFR
AverageDelay (ms)
Fig. 9. Average end-to-end delay (Running)
0 1 2 3 4 5 6 7
Running Walking
OFR
DOR
PRPLC
BAPR
Averagenumberofhops
Fig. 10. Average number of hops
of hops is several times higher. Although DOR has the lower average number, it is not very much meaningful to consider its miserable delivery ratio. BAPR provides a slightly better performance than PRPLC does, but generally speaking, they are on the same of magnitude. The reason is that we calculate the end-to-end delay only for the successfully received packets.
Most packets are dropped by PRPLC due to the bad link quality which was bound to increase the end-to-end delay. One can also observe that the average number of hops is quite stable on BAPR and PRPLC, while the results on OFR is temporally relevant and seems to have a period of the postural movement.
VI. CONCLUSION
A probabilistic routing incorporating inertial information for WBAN was proposed in this paper. In motion-related WBAN application, the inertial information is available to used in routing, which is shown to bring significant impact on the routing efficiency by exploiting instantaneous spatial-temporal topological localities. This paper targets to analyze short- term and long-term topological localities in postural movement and quantify the gain of routing performance based on it.
Performance of the proposed protocol was experimentally evaluated on a WBAN platform and compared with OFR, DOR and PRPLC. It was shown that combining stochastic model and instantaneous acceleration detection in a weighting function, the proposed algorithm can improve significantly the packet
delivery ratio and achieve a delay performance comparable to OFR.
ACKNOWLEDGEMENTS
This research was supported by NSF of China under grant No. 61073158, No. 61100210, STCSM Project No.
12dz1507400, No. 13511507800, Doctoral Program Foun- dation of Institutions of Higher Education under grant No.
20110073120021.
REFERENCES
[1] R. Aylward and J. A. Paradiso. A compact, high-speed, wearable sensor network for biomotion capture and interactive media. In Proc. of the Sixth Int’l Symposium on Information Processing in Sensor Networks, Massachusetts, USA, pages 380–389, Apr. 2007.
[2] H. Ghasemzadeh, V. Loseu, E. Guenterberg, and R. Jafari. Sport training using body sensor networks: a statistical approach to measure wrist rotation for golf swing. In Proc. of the Fourth Int’l Conference on Body Area Networks, Los Angeles, United States, Apr. 2009.
[3] G. Torre, Fernstr. M., B. O’flynn, and P. Angove. Celeritas: wearable wireless system. In Proc. of the 7th Int’l Conference on New Interfaces for Musical Expression, New York, USA, Jun. 2007.
[4] M. Quwaider and S. Biswas. Probabilistic Routing in On-body Sensor Networks with Postural Disconnections. In Proc. of the 7th ACM int’l symposium on Mobility management and wireless access, pages 149–
158, Oct. 2009.
[5] J. Pansiot, B. Lo, and G. Z. Yang. Swimming stroke kinematic analysis with BSN. In Proc. of 2010 Int’l Conference on Body Sensor Networks, Singapore, Jun. 2010.
[6] D. Sturm, K. Yousaf, and M. Eriksson. A wireless, unobtrusive kayak sensor network enabling feedback solutions. In Proc. of 2010 Int’l Conference on Body Sensor Networks, Singapore, Jun. 2010.
[7] Y. M. Zhu, S. L. Keoh, M. Sloman, and E.C. Lupu. A lightweight policy system for body sensor networks. Network and Service Management, IEEE Transactions on, 6(3):137–148, 2009.
[8] P. Ferrand, M. Maman, C. Goursaud, J.-M. Gorce, and L. Ouvry.
Performance evaluation of direct and cooperative transmissions in Body Area Networks. Annals of Telecommunications, Special issue on Body Area Networks Applications and Technologies,, 2010.
[9] J.M. Gorce, G. Goursaud, C. Villemaud, R.D. Errico, and L. Ouvry.
Opportunistic relaying protocols for human monitoring in BANs. IEEE 20th International Symposium on Personal, Indoor and Mobile Radio Communications, Tokyo Japan, pages 732–736, 2009.
[10] L. Maman, M.and Ouvry. Evaluating relaying schemes for BAN TDMA MAC using a space-time dependent channel model. Proc. of Bodynet, Corfu, pages 45–51, 2010.
[11] C. Fu, X. Gao, M. Liu, X. Y. Liu, L. S. Han, and J. Chen. Grap: Grey risk assessment based on projection in ad hoc networks. J. Parallel Distrib. Comput., 71(9):1249–1260, September 2011.
[12] B. Latre, B. Braem, I. Moerman, C. Blondia, E. Reusens, W. Joseph, and P. Demeester. A low-delay protocol for multihop wireless body area networks. In Proc. of The Fourth Annual Int’l Conference on Mobile and Ubiquitous Systems: Computing, Networking and Services, Philadelphia, USA, Aug. 2007.
[13] M. Quwaider and S. Biswas. DTN routing in body sensor networks with dynamic postural partitioning. In Ad Hoc Networks, volume 8, pages 824–841, Nov. 2010.
[14] Y. M. Zhu and L.M. Ni. Probabilistic approach to provisioning guaranteed qos for distributed event detection. In INFOCOM 2008. The 27th Conference on Computer Communications. IEEE, pages 592–600, 2008.
[15] S. Yang, J.L. Lu, L.H. Kong, W. Shu, and M.Y. Wu. Poster : Behavior- aware probabilistic routing for wireless body area sensor networks. In IEEE INFOCOM Poster, Turin, Italy, 2013.
[16] Sparkfun 9 dof razor imu: http://www.sparkfun.com.
[17] The IRIS 2.4Ghz Mote of Crossbow. The datasheet at
http://bullseye.xbow.com:81/Products/productdetails.aspx?sid=264.
[18] T. Spyropoulos and C.S. Psounis, K.and CRaghavendra. Efficient routing in intermittently connected mobile networks: the single-copy case. IEEE/ACM Transactions on Networking, 16(1):63–76, 2008.