Volume19, No1, November 2014, pp. 37-47
1國立成功大學測量及空間資訊學系 博士候選人 收到日期:民國 102 年 08 月 08 日
2國立成功大學測量及空間資訊學系 教授 修改日期:民國 103 年 08 月 14 日
3國立成功大學測量及空間資訊學系 碩士 接受日期:民國 103 年 08 月 20 日
*通訊作者, 電話: 06-2370876 ext.852, E-mail: [email protected]
空載光達資料產製數值高程模型之 品質評估探討
王正楷
1*曾義星
2劉囿維
3摘 要
空載光達資料目前已成為生產大範圍數值高程模型(Digital Elevation Model, DEM)的主要來源之一。
藉由點雲的過濾程序,點雲即可被分類為地面點和非地面點,而分類後的地面點即可用以生產 DEM。欲 評估 DEM 的成果,過去經常使用的方法為計算點雲分類後之分類精度;另一方法則利用一個已知的 DEM 或是已知的控制點當作檢核資料,再與所生產的 DEM 進行高程差異比較。在這二個方法中,當採用分類 精度的指標時,其缺點在於無法顯示點雲分類的成果是否有過度濾除之現象(即代表地面重要特徵的點位 被濾除了),或是地面點群中仍然存在極大的高程差異之非地面點,此分類精度的缺點雖然可以利用高程 差異比較的方法來彌補,但高程差異法在實務的檢核應用上,往往僅適用於平坦地,不適於地勢陡峭之 測區,此乃因地勢陡峭之區域,其地面點和非地面點之分類往往容易混淆,造成有較大的誤差存在,若 以直接高程差異的方式來評估 DEM,這些區域通常難以通過檢核之標準,實務上,我們希望判斷的標準 能夠隨著地勢之起伏而有所調整,且此標準能夠適當且合理的評估 DEM 之品質。因此本研究以實際應用 面的層面來考量,提出一個正規化高程差異指標,此指標可適用於不同坡度之地形,研究中並透過此指 標來評估自行所產製的 DEM,實驗結果顯示,正規化高程差異指標在實際的檢核上,能有效的運用在市 區和郊區中,在考慮坡度的因素後,能夠快速提供 DEM 品值判斷上之依據。
關鍵詞:空載光達、數值高程模型、品質評估
1. 前言
數值高程模型(Digital Elevation Model, DEM) 乃是目前常用的、可作為描述地球表面的資料,又 地理環境現象時常隨著時間或自然災害等逐漸地 改變或短時間的發生變動,因此 DEM 之生產乃有 週期性或即時性之需求,而 DEM 之製作時間及成 本即成為生產者之重要考量。近年來,空載光達系 統的發展,可大範圍且快速地獲取測區之地形地貌,
其所獲取的點雲精度在平面上可達±15 cm 左右,
高程上可達±10cm 左右之等級精度,同時,雷射訊 號有機會穿透森林到達地面以及可記錄多重之反 射回訊,這些優點使得空載光達系統成為產製
DEM 的主要觀測資料。
DEM 品質的檢測指標一般可分為統計和視覺 分析兩種(Podobnikar, 2008)。傳統的品質評估方式,
是以少量但高精度的參考資料(如控制點)與所製 作的 DEM 進行比較,例如採抽樣檢測高程之方式,
透過 RTK 或 eGPS 實測所得之地面點位資料與生 產的 DEM 進行檢測,由於光達的點雲通常不會恰 好落在實測的檢核點上,因此須將分類後的光達地 面點以內插的方式求出對應檢核點平面位置上的 高程,以此計算光達點位與檢核點之高程差異,再 透 過 多 個 檢 核 點 求 出 均 方 根 誤 差 (Root Mean Square Error, RMSE)值。然而,光達資料富含大量 的三維點群,抽樣檢測只能針對少量的檢核點來進
行,無法完善地評估 DEM 之品質。基於此,Jancso and Zavoti(2005)則將 DEM 網格點反投影至對應的 一組空照影像上,再利用影像匹配技術獲得其相對 應的高程,從而比較與原本 DEM 高程之差異,然 而空照影像通常難以獲取樹冠下之高程,因此仍有 所不足。石宏揚及史天元(1997)則針對八掌溪流域 農委會 40 公尺之 DEM 作誤差探討,以坡度、坡 向、等高線及影像處理方式來檢視 DEM 中存在之 誤差。然 DEM 之品質評估,除了利用檢核資料直 接檢核所產製的 DEM 成果外,其產製 DEM 之過 程亦應納入品質評估之考量;Kraus et al. (2006)則 針對影響內插後 DEM 網格精度的四種因子:原始 點雲及鄰近其林進點的點數和分布、原始點與網格 的距離、地面曲率、原始點在高程的精度,進行探 討,然而此分析方法是假設在點雲分類正確無誤之 下,以及所用的地面點應不含有非地面點。而影響 光達點雲製作 DEM 的過程中,點雲分類乃是影響 最終 DEM 成果品質相當重要的因素之一,而用來 評估光達點雲之分類好壞通常可透過分類精度來 進行計算,常見的分類精度有生產者精度、使用者 精度、整體精度和 Kappa 指標,這些指標皆可做為 後續製作 DEM 品質評估之參考。
在上述的高程差異評估和分類精度二種品質 評估的方法中,分類精度無法查出分類錯誤的地面 點其高程是否與真實地面有很大的差異,僅能得知 有點雲錯誤分類之百分比;而高程檢測方法雖可以 偵測是否有高程差異量大之點位存在,然而其尚有 下述的二項缺點:第一,檢核點位數量不多且難以 全面獲取,部分地形陡峭的區域難以進入進行施測,
因此造成檢核點多分布在平地上,使得測區檢核點 具有數量不足且不均勻散布之風險,而若待檢核之 DEM 中含有部分之陡峭地形(如山區),那麼透過 此法所檢測的差值結果,即會過度樂觀地高估 DEM 之品質(因檢核點多落在平地上,其高程差值 通常較低)。第二,當有全區之檢核資料時(例如用 一個已經過檢核之 DEM 或已經過嚴謹分類後的點 雲資料做為檢核資料),實務上會發現在地形崎嶇 處,發生高程差異較大的情形其頻率相對於平坦地 有很明顯地提高,造成這個差異的主要原因為當測
區地形崎嶇且又有低矮植物覆蓋時,此兩種地物的 點雲常有模糊地帶,難以區分,自動化的分類過程 有很高的機會分類錯誤,即使利用人工來進行地面 與非地面點之分類,不同的操作人員,其分類結果 亦會出現有很大的不一致性(在這些區域,操作員 對於點位判定認知的不同將會特別明顯),而在實 際的應用上,為了檢驗生產方(或稱乙方)所生產的 大範圍 DEM,通常檢核方(或稱丙方)亦會同時生 產同一區的 DEM 來互相比對,然而,由於兩方操 作員對上述所提及較難以判定之陡峭區域,其人為 認知所帶來的差異即為造成此區域的 DEM 難以通 過檢驗。基於實際應用的考量下,若要對這些地區 進行反複的編修直致符合檢核方所生產的 DEM,
勢必耗費大量的時間和人力成本,不符實際效益。
因此,對於此高程差異法的應用,應進一步在檢核 的方式上作改進,將地形因素納入考量。基於此,
本文即提出了正規化高程差異之指標,透過預先計 算的高程坡度,將坡度以加權的概念調整高程差異 之門檻值,當地勢起伏較大時,則調整給予較大的 容忍值,當坡度平坦時,則給予較小的容忍值,如 此將地勢起伏之因素消彌,改善直接高程差異法之 缺點,提升檢核之速度。
2. DEM 品質定義
以空載光達資料所產製之 DEM,其誤差來源 主要有三種,一是點雲資料本身點位的誤差,二是 點雲過濾(分類)誤差,三是地面點點雲資料網格化 所經內插所產生的誤差,這些誤差會逐漸累積至最 終的 DEM 上。本研究假設光達資料僅有儀器產生 之隨機誤差,而粗差以及航帶間之系統誤差已在預 處理中被剔除或消弭。而點雲資料經過濾後所得的 地面點,乃以一定解析度(本研究為 1 公尺×1 公尺) 的網格以 Kringing 內插方式網格化,在點雲數量 充足下,內插所產生之誤差應相當有限,因此,本 研究主要以點雲過濾誤差之影響,評估產製 DEM 之品質。
DEM 產製過程中,品質控制是不可缺少的一 部 分 , 美 國 內 政 部 地 質 調 查 所 (United States
Geological Survey, USGS)針對 DEM 的測製編撰品 質標準手冊(USGS, 1997),提出以均方根誤差(Root Mean Square Error, RMSE)、邏輯及視覺驗證等方 式評估 DEM 品質。然而對於均方根誤差指標而言,
如前所述,高程差值和地形梯度(gradient)通常存在 正相關的關係,在地形起伏變化大或是梯度較大的 區域容易會有較大的高程差異,如圖 1 所式,其顯 示真實地表及產製 DEM 之剖面示意圖,圖中兩 DEM 之高程差異如虛線表示,此較大的差異值往 往會相當程度的提高 RMSE 之數值,故 RMSE 的 指標對於地勢的起伏存在高度的相關性,而本研究 所言考量之正規化高程差異,相當於利用此點在法 方向(Normal)的高程差異來取代原本的差值(如圖 中實線箭頭所式),這樣的計算方式,讓每個高程 差都是由此點沿著法方方向到參考 DEM 之距離,
各點的差值可看作改正了坡度所帶來的影響,即此 正規化差值不受此點所在的坡度因子之影響,如此,
即可較符合實際之檢核應用。
綜合上述,本研究對於生產高品質的 DEM 之 檢核,定義為應具備底下三個要件:
1. 點雲過濾後必須要有良好的分類精度。
2. 與參考(檢核)資料的高程差異應小,其乃表示產 製之 DEM 越貼近真實地表。
3. 就經驗而言,在山區地形局部劇變且參雜低矮 灌木的地方,比平地更容易發生錯誤,因此,
我們希望在作兩 DEM 的差值比較時,對於地形 起伏較大的區域能有較大的高差容忍值。
圖 1 真實地表及產製 DEM 剖面示意圖
3. 傳統 DEM 品質評估方法
點雲分類的誤差直接影響 DEM 的品質,而分 類的正確及錯誤之統計數目常以誤差矩陣(Error Matrix)表示之,若將點雲分類為地面點及非地面點,
則其誤差矩陣可以表示如表 1,由誤差矩陣可推導 出一些品質指標,如型一錯誤(Type I error)、型二 錯誤(Type II error)、整體精度(Overall Accuracy, OA) (Fenstermaker, 1994; Lillesand and Kiefer, 2000):
Type I error = B
A + B∗ 100%
Type II error = C
C + D∗ 100%
OA = A + D
E ∗ 100%
表 1 點雲分類之誤差矩陣
誤差矩陣
分類成果 地面點 非地
面點 總和
參考 資料
地面點 A B H (A+B) 非地
面點 C D I (C+D) 總和 F (A+C) G
(B+D) E (A+B+C+D) A:地面點被正確分類之個數;B:地面點被誤判 為非地面之個數;C:非地面點被誤判為地面之個 數;D:非地面點被正確分類之個數
型一錯誤表示應為地面點之點雲誤判為非地 面點,即地面點漏授(omission)。型二錯誤表示應 為非地面點之點雲誤判為地面點,即地面點誤授 (commission)。無論是型一錯誤或型二錯誤,不正 確的點雲分類都可能使產製之 DEM 失真。在平坦 且地物覆蓋少的區域,地面點的數量對於 DEM 精 度無太大差異。如圖二所示,紅色點假定為正確分 類之地面點,藍色點及紅色點分別為型一錯誤(漏 授)和型二錯誤(誤授),由圖可知,因漏授而產生的 誤差,經內插後其錯誤對地形高程無太大影響,但 誤授的存在則使得其後製之 DEM 明顯異於原本之 地形起伏。型一錯誤之影響是使得該處之點雲密度 較應有之密度低,然以光達高密度之資料特性,其 影響對內插成 DEM 之成果不大。故大多點雲過濾 演算法傾向於過度濾除(Over-filtering)點雲以降低 型二錯誤,因誤授情形可能影響 DEM 甚鉅。
圖 3 展示測區同時涵蓋平坦以及陡峭之地型
範例,圖 3(a)為參考地面點,圖 3(b)為陰影圖,原 始資料經自動過濾後(利用 TerraScan 軟體),可得 分類後之地面點,圖 3(c)和(d)中,黑色線表示參考 地面點所構成之 DEM 等高線,而圖 3(c)中紅色線 為分類後型二錯誤之 DEM 等高線,圖 3(d)中紅色 線則為型一錯誤之 DEM 等高線。由圖可知,型一 錯誤常常發生在地形陡峭處,如山區,因其地勢變 化多端,且通常被樹木覆蓋,這樣的地形原本地面 點已經不足,再加上此地之幾何複雜,一般的分類
器容易將地面點分類成非地面點,因此造成型一錯 誤,型一錯通常會造成地面點數量不足,對於經內 插後之網格化 DEM,依照內插的方法和特性,多 半會產生對應的高程差異。而圖 3(c)顯示在地勢平 坦區接近地形開始變化處以及有房屋或樹木之周 圍區域,有較大機會產生型二錯誤,此型二錯誤即 會造成前述所論及之較大高程差異,這些大的高程 差異在所製造的 DEM 上,在視覺上具有突出狀之 特徵。
圖 2 平坦地區漏授、誤授對於 DEM 之影響示意圖
圖 3 地形起伏較大之地區其漏授、誤授對於 DEM 之影響範例。(a)參考地面點;(b)測區陰影圖;(c)黑色 為參考 DEM 等高線、紅色為涵蓋型二錯誤等高線;(d)黑色為參考 DEM 等高線、紅色為涵蓋型一錯 誤之等高線
(a)
(c)
(d)
(b)
另外,儘管分類精度提供一個了解分類成果之 指標,然其分類精度仍隱含有隨機分類可能達到的 正確率,其統計意義不夠嚴謹,因而 Cohen(1960) 提出 Kappa 指標,將隨機分類可達到的正確率扣除,
以符合統計意義:
𝑘̂ =OA
1 ∗ 100%
其中 = F∗H+G∗IE2 為機率一致率(chance agreement rate)。
3.1 高程差異量評估
高程差異評估乃透過兩 DEM 相同位置之差異 值進行評估,並進一步計算出整體的均方根誤差。
通常 DEM 若以規則網格來表示,則利用兩規則網 格相減後即可得其差異成果。而由其差異值可以再 計算得平均值(𝜇)、均方根誤差(RMSE)、最大值
(Max)和最小值(Min)作為評估指標:
𝜇 =∑n Δzi i=1
n 、𝑅𝑀𝑆𝐸 = √∑n Δzi2 i=1
n
其中,n 為總網格數目,Δzi為DEM 網格差值 將高程差異值進行數值統計,圖 4 表示一個測 區之統計範例,由圖 4(b)可得知高程差異的大小和 其分佈情形;高程差異大小的數量可進一步藉由直 方圖展示之(圖 4(c)所示),其誤差分佈集中於中央 0 值,90%的高程差異量介於-1 及 1 之間,絕大部 分的濾除成果與參考資料的高程相符。由於較大的 高程差異數量很小,其直方圖不能清楚顯現大誤差 之數量,故將縱軸的網格數目乘上 10 取對數log10, 可得圖 4(d)新的高程差異直方圖。縱軸為 1 代表此 差異量值僅有一個網格,2 則表示 10 個網格,依 此類推。若其取對數後的差異直方圖的差異範圍越 窄(X 軸),其 DEM 品質可認為較佳。
圖 4 高程差異統計範例,測區為平坦區都市區。(a)參考地面點雲;(b)自動過濾生成之 DEM 與參考 DEM 的誤差,白色代表比參考地面還高,黑色代表比參考地面還低;(c)高程差值個數直方圖;(d)高程差 值取對數個數直方圖,其中 n 表示個數總數
4. 高程差異正規化
進行空載光達產製 DEM 之實測計畫時,通常 沒有對應全部範圍的地真資料來評估產品之品質。
所以在實際作業中一個可行之品質控管方法是採 抽取部分資料重複進行點雲過濾來交互檢驗,比較 兩個獨立作業生產的 DEM 之高程差異,來評估 DEM 的產製品質。此檢驗最主要的目的是抽驗 DEM 產品中存在多少大誤差的網格點,藉此回頭 檢驗生產者犯了哪些點雲過濾上的錯誤。然而,此 方法亦受到編輯人員對點雲判斷認知之影響,以實 務經驗而言,都市區或平坦區在生產者以及檢驗者 對於點雲辨識的認知有較一致的情況,亦即其平坦 區所製成的 DEM 兩者差異通常較小,此部分若有 較大的差異,通常即為人為的粗差所致,例如不經 意的將建物的點群視為地面點,然而,對於一個較 有經驗且熟練之生產者,這些錯誤發生的頻率應較 低;而在地勢起伏較大的地區,例如山坡地形,在 實務經驗上,生產者和檢驗者所製成的 DEM 有較 高的機會產生大的高程差異,其原因為地勢崎嶇的 山坡地形,除了可能有高大的植被覆蓋外,尚存在 低矮之灌木,這些低矮的灌木由於接近地面,又因 地形陡峭,使得即使利用人工判斷,有時亦難以斷 定該點歸屬於地面亦或是灌木,此時,一個明顯的 高程差可能就會因為人為判定認知的差異而產生。
因此,倘若單純使用高程差異的量值來做為檢驗之 指標,往往會發現山區中有極多處屬於須重新檢驗 之區塊,而在平地區域,其高程差異量大的區塊則 相對很少。倘若僅使用一個高程差異門檻來判斷某 區是否需要重新檢驗,那麼會發現平地區幾乎不需 檢驗,而高山區不通過此門檻的區域則相當多,往 往難以通過檢核標準。由此可知,如此單一門檻的 檢核方式是不符實際應用的,一個好的檢核方式應 將地勢起伏納入考量,隨著地勢不同而調整其通過 門檻,在地勢平坦區,其門檻應相對較低(嚴格),
使得人工的粗差能夠察覺出,而地勢起伏大的區域,
則放寬門檻,使檢驗能夠排除前述所談及因人工判 識之模糊地帶所造成的差異。
基於上述考量,本研究乃改進直接高程差異之 指標進而提出「正規化高程差」來因應地勢起伏之 情況。圖 5 為此正規化高程差之計算流程,首先步 驟乃計算出待檢驗之 DEM(以 DEM A 表示)以及用 來檢核之參考 DEM(以 DEM B 表示)的梯度,如此 可分別得到梯度影像,本文所採用的梯度計算法採 Sobel 梯度運算元,在得到梯度影像後,取對應的 兩個梯度影像中的最小值(每個對應的梯度像元) 當作此區域的參考梯度影像,取兩者中梯度較小值 的原因為 DEM 之取得須先進行非地面點的過濾,
過程中常有過濾不完全的情況,兩 DEM 相對網格 間的較大梯度值,往往是過濾未完全之錯誤處,其 梯度值的可信度較低。得到測區參考梯度影像後,
可再以之產生一個稱作高差調整值的
h
,此高差調 整值計算方式為網格解析度大小(例如本研究即為 1 m)乘上梯度之絕對值,接著再以原始的 DEM 計 算出兩 DEM 之高差值(△DEM , DEM A – DEM B),即高程差值影像(△DEM),,透過△DEM 和
h
,即 可求出正規化高程差影像,其計算方式如下:倘若 原本的高差值△DEM (X Yi, i)大於 0,則減去高差調 整值(h),而調整後的高差值若小於 0,則將調整 後的高差值設為 0;反之,若原本高差值△DEM (X Yi, i)小於 0,則加上此高差調整值(h),若其結 果大於 0,則將調整後的高差值設為 0,最終即會 得到正規化高程差影像。圖 6 為一個 DEM,經上 述之計算流程後,所得到的正規化高程差之成果範 例,同時,我們亦計算出傳統直接高程差異法之成 果,以進行比較。由圖 6(c)可知,單純的 DEM 高 程差其差值往往較大,且分布更為零星和廣泛,而 若使用正規化高程差(圖 6(d)),其差異較大的地區 較為集中且分布較少,此時,由於此差值已經過坡 度之改正,即可利用一個單一門檻(如 2 m),找出 正規化高程差異量大於此門檻的區域,以茲作為不 合格之區域,計算其不合格之數量或面積,進而判 定所製成之 DEM 是否合格或需重新再進行編輯。圖 5 正規化高程差計算流程圖
圖 6 ISPRS Sample52 (a) 自動過濾後之地面點;(b)參考檢核地面點;(c)傳統 DEM 直接高程差值影像;(d) DEM 正規化高程差影像
對應網格最小梯度值
若△DEM ( i ) > 0 減去高差調整值 ( i )
若 △DEM( i ) < 0 加上高差調整值
若 數值 < 0 以 0 代替
DEM A DEM B
DEM A 梯度 DEM B 梯度
測區參考梯度
高差調整值
= abs(網格解析度
×梯度) DEM 差值影像△DEM
(DEM A – DEM B)
正規化高程差異
若調整後的 數值> 0 以 0
代替
(a) (b)
(c) (d)
5. 實驗成果與討論
5.1 資料描述
本研究實驗所使用的資料為 OEEPE 於 2000 年雷射掃描計畫所建製的光達數據,ISPRS 對於上 述光達數據擷取十五個小區域進行人工分類後,提 供分類後(地面/非地面)之點雲資料,可作為本研究 檢核資料之用。本實驗中從這十五個區域中擷取兩 種具有代表性之地形資料,一為都市區域(樣本 23),
二為有樹木覆蓋以及地形陡峭之郊區(樣本 52),兩 測區原始資料利用商業軟體 TerraScan 進行測區的 自動過濾,以其結果作為待檢核之資料,各測區之 品質評估成果描述如下面兩小節。
5.2 都市區 DEM 成果與品質評估
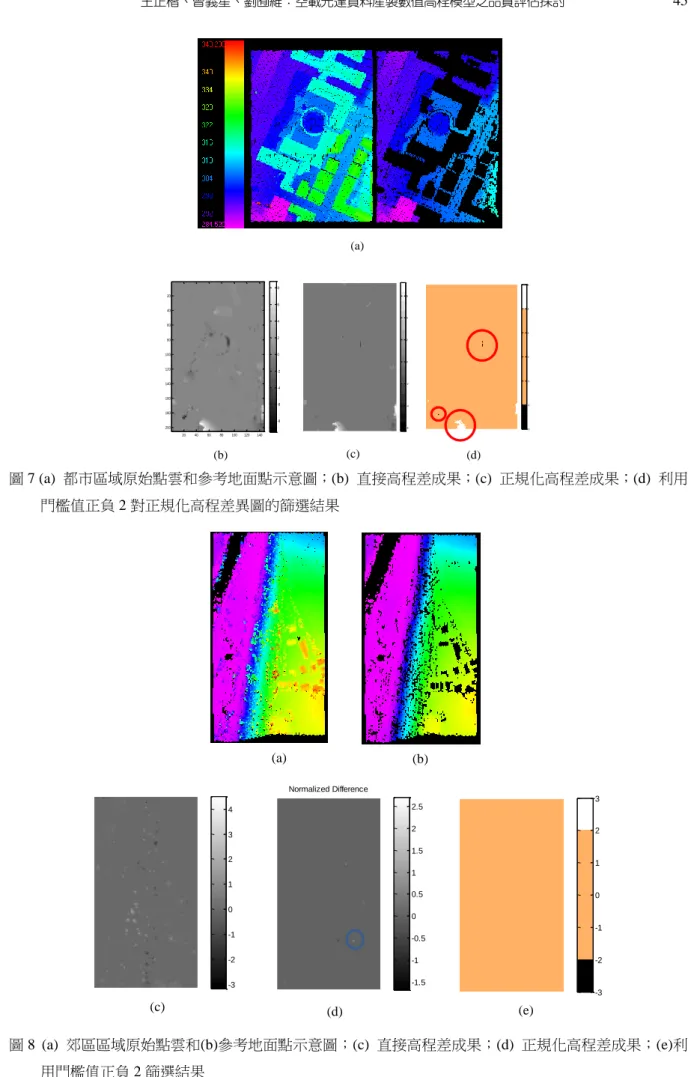
此測區之原始點雲和參考地面點如圖 7(a)。將 原始點雲經 TerraScan 過濾後,可得到一組生產者 的分類點雲,再利用原本的參考地面點即可以進行 分類精度之統計,如表 2。由表可知,整體精度高 達 94.47%,且 Kappa 亦有 88.92%,型一和型二錯 誤亦不大,因此可以初步判定 TerraScan 之演算法 對於本測試區域有不錯的分類能力。
接著我們將兩地面點雲內插成網格 DEM 後,
計算其高程差值,如圖 7(b),由圖可知,其高程差 異分布廣泛,若以此為檢核依據,那麼此 DEM 成 果很容易被判定不符標準。而若考量梯度所計算完 成之正規化高程差(圖 7(c)),則明顯減少了大部分 較大的高程變異量,而若以建物是否沒濾除乾淨所 造成的殘差為考量,本研究根據經驗乃將差異門檻 設在正負 2 公尺內,若正規化高程值在此正負 2 公尺的範圍內,則令其為合格,否則,及令為有疑 義之區域,意即此區域可能有分類錯誤的情形產生,
需要人工進一步的檢核。圖 7(d)即為計算後之成果,
由圖可知,原本在圖(b)中有較大高程差異的大多 數區域都可符合標準,僅有少部分殘留在邊界,然 而,殘留的原因乃是因為點雲資料不能完整表現出 建物幾何,導致分類器判斷錯誤所致,因此,我們 可以認為這個區域的建物都有效的去除了,其正規
化差值也都符合正負 2 公尺之門檻,此 DEM 的品 質是能夠接受的,此 DEM 認為通過檢核的標準,
並將本對應檢查的成果(即正規劃高程成果)一併 附上供後續使用者參考。
表 2 ISPRS 樣本 23 過濾成果之分類精度統計 Overall
accuracy (%)
Type I error(%)
Type II
error(%) Kappa(%)
TerraScan
自動過濾成果 94.47 6.17 4.81 88.92
5.2 郊區 DEM 成果與品質評估
圖 8(a)和(b)為郊區測區的原始光達資料以及 地面點,此測區涵蓋建物、樹木以及一明顯的斜坡 (位於圖幅中間成南北向),經自動過濾後可得分類 精度,如表 3,若只看總精度和 Kappa 指標,可知 其分類成果相當好,然而,查其型二錯誤,可推測 有許多的低矮樹木點被誤判為地面點,由圖 8(c) 的 DEM 傳統直接高程差異可說明此現象,其高差 在斜坡有較多明顯的差異產生,而若將坡度考慮進 去得到正規化高程差異(圖 8(d)),則這些差異值較 大的數量可看出有明顯的降低,今同樣設定一個門 檻(正負 2 m),對正規化高程差異進行檢核,其成 果如圖 8(e),可知此測區之品質可通過檢驗。
而若欲對所產製的 DEM 更嚴格的檢查,可將 正規化高程差門檻設定為更低,例如 1 公尺,此時 圖 8(d)中的圓圈處即超過此門檻,那麼檢核者即須 對此區域的原始分類點雲進行檢查,若發現點雲有 錯誤的分類,則對此局部區域的點雲分類進行以人 工重新分類,接著再重新製作新的 DEM。
表 3 樣本 51 過濾成果之分類精度統計 Overall
accuracy (%)
Type I error(%)
Type II
error(%) Kappa(%)
TerraScan
自動過濾成果 98.59 0.31 5.54 95.81
圖 7 (a) 都市區域原始點雲和參考地面點示意圖;(b) 直接高程差成果;(c) 正規化高程差成果;(d) 利用 門檻值正負 2 對正規化高程差異圖的篩選結果
圖 8 (a) 郊區區域原始點雲和(b)參考地面點示意圖;(c) 直接高程差成果;(d) 正規化高程差成果;(e)利 用門檻值正負 2 篩選結果
20 40 60 80 100 120 140
20 40
60
80 100
120
140 160
180 200
-8 -6 -4 -2 0 2 4 6 8
Normalized Difference
-6 -4 -2 0 2 4 6
Normalized Difference
-3 -2 -1 0 1 2 3
(b)
(a)
(c) (d)
-3 -2 -1 0 1 2 3 4
Normalized Difference
-3 -2 -1 0 1 2 3
(c) (d) (e)
(a) (b)
Normalized Difference
-1.5 -1 -0.5 0 0.5 1 1.5 2 2.5
6. 結論
本研究分析空載光達產製 DEM 過程中點雲過 濾對其品質的影響,研究中發現分類精度良好並不 代表沒有較大的高程差異量殘留於地面點中,分類 精度雖是一項常用的重要指標,仍不足以應用於 DEM 之品質檢核,其乃因分類精度無法顯示那些 分類錯誤的點雲,與真正地面的高程差異情形。而 本研究所提出的高程差異正規化指標之檢驗方法,
其可針對不同的地勢進行彈性調整,相比於直接計 算之高程差異來進行比較,正規化之高程指標較具 有實際應用之可行性,此指標乃透過梯度正規化後 的高程差異數值,可看成將整個區域轉換成梯度都 一致的區域,此時所計算出來的高程差異,自然可 有效地顯示出真正錯誤之地方,減少再以人工繼續 反覆檢核以及無止盡的因未達標準而重新編修之 困境。
參考文獻
石宏揚及史天元,八掌溪流域農委會 40 公尺 DEM 之誤差探討,土木水利,24(23): p. 46-55,
1997。
Cohen, J. 1960. A coefficient of agreement for nominal scales, Educational and Psychological Measurement. 20(1): pp. 37–46.
Fenstermaker, L.K., 1994. Remote Sensing Thematic Accuracy Assessment: a compendium, American Society for Photogrammetry and Remote Sensing, Bethesda Md, pp. 413.
Jancso, T. and Zavoti, J., 2005. Automated Quality Control for Orthoimages and DEMs, Photogrammetric Engineering and Remote Sensing, 71: pp. 81-87.
Kraus, K., W. Karel, C. Briese & G. Mandlburger, 2006. Local accuracy measures for digital terrain models. The Photogrammetric Record, 21, 342-354.
Lillesand, T.M. and Kiefer, R.W., 2000. Remote Sensing and Image Interpretation, Wiley & Sons, New York, pp. 724.
Podobnikar, T., 2008. Methods for Visual Quality Assessment of a Digital Terrain Model, S.A.P.I.EN.S., 1(2): pp. 1-10.
United States Geological Survey, 1997. Standards for Digital Elevation Models Part 3 Quality Control.
U.S. Department of the Interior, National Mapping Division.
1 Ph.D. Candidate, Department of Geomatics, National Cheng Kung University Received Date: Aug. 08, 2013
2 Professor, Department of Geomatics, National Cheng Kung University Revised Date: Aug. 14, 2014
3 Master, Department of Geomatics, National Cheng Kung University Accepted Date: Aug. 20, 2014
*.Corresponding Author, Phone: 886-6-2370876 ext.852, E-mail: [email protected]
Quality Assessment of DEM Generation from Airborne Laser Scanning Data
Cheng-Kai Wang 1* Yi-Hsing Tseng2 Yu-Wei Liu 3
ABSTRACT
The airborne laser scanning point clouds have become one of the primary data sources for DEM generation.
By applying filtering algorithms to point clouds, the points can be classified into non-ground points and ground points. The DEM is then produced from the ground points. To assess the quality of DEM generation, a traditional method is to compute the classification accuracy of filtering results. Another method is to check the elevation differences between the produced DEM and a reliable reference DEM or some control points. However, the classification accuracy cannot reveal the over-filtering situations or any distinct non-ground points still remaining in the filtered ground data set. Although those disadvantages can be complemented by using the elevation difference method, the elevation difference method still needs to further take the topography relief into considerations for the use in a practical application. Usually those higher elevation differences occur in slope surfaces because the points on a slope surface are not easier to be classified by most filters compared with the points in a planar surface. For this reason, this paper presents a normalized elevation difference method which takes account of the surface slopes. The basic idea is using the slope as the weights for elevation difference computing. In a slope surface, the elevation difference toleration will raise while decrease in a planar surface.
The experiment results show that our proposed method can be considered as a new assessment indicator especially in a practical application.