國
立
交
通
大
學
電機與控制工程研究所
碩
士
論
文
直流有刷馬達之系統判別
System Identification of Brush DC Motors
研 究 生:吳昶慶
指導教授:李福進 博士
直流有刷馬達之系統判別
System Identification of Brush DC Motors
研 究 生:吳昶慶 Student:Chang-Ching Wu 指導教授:李福進 Advisor:Fu-Ching Lee 國 立 交 通 大 學 電機與控制工程研究所 碩 士 論 文 A Thesis
Submitted to Department of Electrical and Control Engineering College of Electrical Enginnering and Computer Science
National Chiao-Tung University in Partial Fulfillment of the Requirements
for the Degree of Master in
Electrical and Control Engineering
June 2008
Hsinchu, Taiwan, Republic of China
直流有刷馬達之系統判別
研究生:吳昶慶 指導教授:李福進 博士
國立交通大學電機與控制工程學系碩士班
摘 要 本篇論文研究的主題在利用最小平方估測法,有效率的找出直流有刷馬達 的最佳轉移函數,以便我們在設計馬達系統的控制器時,盡可能達到簡化量測 過程且不失準確的效果。文中經由架設之實驗儀器,實際量測直流有刷馬達 (SANYO DENKI U718T-012EL8)的轉移函數,並和本研究利用最小平方估測法 所求得之轉移函數做分析比較,以驗證本文方法的可行性並探討其優缺點。System Identification of Brush DC Motors
Student : Chang-Ching Wu Adviser : Dr. Fu-Ching Lee
Institute of Electrical and Control Engineering
National Chiao-Tung University
ABSTRACT
The purpose of this thesis is to utilize the least-square estimation method to find out the optimal transfer function of a brush DC motor system efficiently. So that we can simplify the measure process without losing the accurate result as much as possible while designing the controller of the motor system. We actually measure the transfer function of the brush DC motor system (SANYO DENKI
U718T-012EL8) via laboratory apparatus, and compare with the transfer function from the least-square estimation method. Finally, we can verify the feasibility of the method in this article and discuss its advantages and disadvantages.
誌 謝
研究所兩年的時間其實並不長,但在這段時間所獲得的學習與成長卻是相 當的豐碩。首先感謝恩師 李福進博士對學生無論在研究方法、學習態度與為 人處事上的諄諄教誨,讓學生能夠在這兩年裡學習到面對研究學問該具備的嚴 謹態度、面對各項理論該具備的充分理解與在為人處事上應有的細心與認真。 兩年來的研究生活,因為恩師的指導,使學生受益良多,在此致上學生最真誠 的謝意。另外也誠摯感謝口試委員林心宇老師和張志永老師對學生本論文研究 的指導與建議。 同時也要感謝我所有的朋友們,感謝海葳、永麟、文佑和阿樸,因 為有你們的幫助與討論,使的我在研究面對到困難時,總能夠迎刃而解; 感謝嘉修、文彥、君岳和維荏,當我在心情較沮喪低落時,給我打氣鼓 勵,因為有你們的陪伴,使我能夠很快的恢復元氣、重新振作;也感謝 偉彥、景燦、哲緯和群峰,陪我談心、給我意見,使我能夠持續前進。 最後,當然還要感謝我的家人,因為您們的支持與鼓勵,使我無後 顧之憂,能專心於學業上;因為您們二十多年來的養育與無怨無悔付出, 才能造就今日的我。謝謝您們,我最親愛的家人。目 錄
頁次 中文摘要 --- i 英文摘要 --- ii 誌謝 --- iii 目錄 --- iv 表目錄 --- vi 圖目錄 --- vii 第一章 緒論--- 1 1.1 研究動機與目的--- 1 1.2 章節安排--- 1 第二章 實驗設備--- 3 第三章 直流有刷馬達系統量測--- 14 3.1 介紹--- 14 3.2 馬達輸入電壓信號--- 14 3.2.1 驅動電路輸入端信號--- 15 3.2.2 驅動電路輸出端信號--- 17 3.3 馬達輸出轉速信號--- 19 3.3.1 判定係數 R-square --- 193.3.2 馬達輸出轉速信號 Sine Curve Fitting --- 21 3.4 馬達系統波德圖及轉移函數--- 35 第四章 實際模擬與比較--- 38 4.1 定理及演算法--- 38 4.1.1 線性差分方程式--- 38 4.1.2 最小平方估測法--- 40 4.2 最小平方估測法的模擬--- 42 4.2.1 輸入及輸出信號--- 42 4.2.2 直流有刷馬達系統架構--- 43 4.2.3 模擬與比較--- 44 4.3 模擬結果的比較--- 57 第五章 結論--- 58 參考文獻 --- 59
表 目 錄
表2.1 OPA548 CURRENT LIMIT: 0 to 5A--- 6
表 3.3-1 馬達輸入電壓信號Vo (t)=(-3)sin(2 ft)+(-6)1 π 時,各頻率所估測 出的馬達輸出轉速信號函數 y 及其判定係數 R-square 值。 --- 22 表 3.3-2 馬達輸入電壓信號Vo (t)=(-4)sin(2 ft)+(-7)2 π 時,各頻率所估測 出的馬達輸出轉速信號函數 y 及其判定係數 R-square 值。 --- 22 表 3.3-3 馬達輸入電壓信號Vo (t)=(-5)sin(2 ft)+(-8)3 π 時,各頻率所估測 出的馬達輸出轉速信號函數 y 及其判定係數 R-square 值。 --- 23 表 3.3-4 馬達輸入電壓信號Vo (t)=(-6)sin(2 ft)+(-9)4 π 時,各頻率所估測 出的馬達輸出轉速信號函數 y 及其判定係數 R-square 值。 --- 23 表 3.3-5 馬達輸入電壓信號Vo (t)=(-3)sin(2 ft)+(-17)5 π 時,各頻率所估 測出的馬達輸出轉速信號函數 y 及其判定係數 R-square 值。 --- 24
圖 目 錄
圖2.1 直流有刷馬達系統量測實驗方塊圖--- 3 圖2.2 直流有刷馬達和編碼器實體圖--- 4 圖2.3 直流有刷馬達驅動電路--- 5 圖2.4 OPA548接腳圖--- 7 圖2.5 驅動電路實體圖--- 8 圖2.6 編碼器實體圖--- 9 圖2.7 馬達驅動器實體圖--- 10 圖2.8 馬達輸出轉速數值讀取介面--- 10 圖2.9 介面模組TDS2CM--- 11 圖2.10 訊號產生器和電源供應器實體圖--- 12 圖2.11 直流有刷馬達系統量測實驗的整體全貌圖--- 13 圖 3.2-1 Vi (t)=2sin(2 11t)+3.52 π 信號圖--- 16 圖 3.2-2 Vi (t)=2.5sin(2 10t)+43 π 信號圖--- 16 圖 3.2-3 Vi (t)=3sin(2 10t)+4.54 π 信號圖--- 16 圖 3.2-4 Vi (t)=2sin(2 11t)+3.52 π 和Vo (t)=(-4)sin(2 11t)+(-7)2 π 信號圖 --- 18 圖 3.2-5 Vi (t)=2.5sin(2 10t)+43 π 和Vo (t)=(-5)sin(2 10t)+(-8)3 π 信號圖 --- 18圖 3.2-6 Vi (t)=3sin(2 10t)+4.54 π 和Vo (t)=(-6)sin(2 10t)+(-9)4 π 信號圖 --- 18 圖 3.3-1 馬達輸入電壓信號Vo (t)=(-3)sin(2 ft)+(-6)1 π 時,各頻率所估測 出的馬達輸出轉速信號函數 y 和真實馬達轉速信號波形比較圖。 --- 25 圖 3.3-1 馬達輸入電壓信號Vo (t)=(-3)sin(2 ft)+(-6)1 π 時,各頻率所估測 出的馬達輸出轉速信號函數 y 和真實馬達轉速信號波形比較圖。(續) --- 26 圖 3.3-2 馬達輸入電壓信號Vo (t)=(-4)sin(2 ft)+(-7)2 π 時,各頻率所估測 出的馬達輸出轉速信號函數 y 和真實馬達轉速信號波形比較圖。 --- 27 圖 3.3-2 馬達輸入電壓信號Vo (t)=(-4)sin(2 ft)+(-7)2 π 時,各頻率所估測 出的馬達輸出轉速信號函數 y 和真實馬達轉速信號波形比較圖。(續) --- 28 圖 3.3-3 馬達輸入電壓信號Vo (t)=(-5)sin(2 ft)+(-8)3 π 時,各頻率所估測 出的馬達輸出轉速信號函數 y 和真實馬達轉速信號波形比較圖。 --- 29 圖 3.3-3 馬達輸入電壓信號Vo (t)=(-5)sin(2 ft)+(-8)3 π 時,各頻率所估測 出的馬達輸出轉速信號函數 y 和真實馬達轉速信號波形比較圖。(續)
--- 30 圖 3.3-4 馬達輸入電壓信號Vo (t)=(-6)sin(2 ft)+(-9)4 π 時,各頻率所估測 出的馬達輸出轉速信號函數 y 和真實馬達轉速信號波形比較圖。 --- 31 圖 3.3-4 馬達輸入電壓信號Vo (t)=(-6)sin(2 ft)+(-9)4 π 時,各頻率所估測 出的馬達輸出轉速信號函數 y 和真實馬達轉速信號波形比較圖。(續) --- 32 圖 3.3-5 馬達輸入電壓信號Vo (t)=(-3)sin(2 ft)+(-17)5 π y 時,各頻率所估 測出的馬達輸出轉速信號函數 和真實馬達轉速信號波形比較圖。 --- 33 圖 3.3-5 馬達輸入電壓信號Vo (t)=(-3)sin(2 ft)+(-17)5 π y 時,各頻率所估 測出的馬達輸出轉速信號函數 和真實馬達轉速信號波形比較圖。(續) --- 34 圖 3.4-1 輸入電壓和輸出轉速的馬達系統--- 35 圖 3.4-2 直流有刷馬達系統波德圖--- 37 圖 4.1-1 單一輸入和單一輸出(SISO)的離散系統--- 38 圖 4.2-1 k =1 =2 模擬比較圖(R-square=0.9209)--- 47 k = k = 2 k 圖 4.2-2 1 k2=2 波德圖--- 47 圖 4.2-3 1 k2=3 模擬比較圖(R-square=0.8870)--- 48
圖 4.2-4 k =1 =3 波德圖--- 48 k = k = k = k = 2 k 圖 4.2-5 1 k2=4 模擬比較圖(R-square=0.8855)--- 49 圖 4.2-6 1 k2=4 波德圖--- 49 圖 4.2-7 1 k2=5 模擬比較圖(R-square=0.8708)--- 50 圖 4.2-8 1 k2=5 波德圖--- 50 圖 4.2-9 k1=2,k2=3 模擬比較圖(R-square=0.8976)--- 53 圖 4.2-10 k1=2,k2=3 波德圖--- 53 圖 4.2-11 k1=3,k2=2 模擬比較圖(R-square=0.9026)--- 54 圖 4.2-12 k1=3,k2=2 波德圖--- 54 圖 4.2-13 k1=3,k2=4 模擬比較圖(R-square=0.8740)--- 55 圖 4.2-14 k1=3,k2=4 波德圖--- 55 圖 4.2-15 k1=4,k2=3 模擬比較圖(R-square=0.8954)--- 56 圖 4.2-16 k1=4,k2=3 波德圖--- 56 圖 4.3-1 波德圖比較--- 57
第一章 緒論
1.1 研究動機與目的 對於一個未知的系統要去設計其理想的控制器,我們必須要先求得該系統 的最佳轉移函數。在本論文中,吾人將以最小平方估測法[1](Least-Squares Estimation Method)搭配選取適當的輸入及輸出信號頻率,做為本論文研究系統 判別的方法。接著將本研究之估測結果和繁瑣的量測實驗結果做比較,看是否 能夠達到有效率且不失準確的獲得一個未知系統之最佳轉移函數的目標。 本論文是以直流有刷馬達(SANYO DENKI U718T-012EL8)的實際例子來 做研究。先利用本研究實驗所架設的量測設備真實的量測其輸入和輸出資料, 接著分析其輸入和輸出資料完成此馬達真實系統波德圖並獲得真實系統的轉 移函數。接著再和本論文研究方法所求得的波德圖及轉移函數做比較,判斷本 論文研究方法所求得的波德圖及轉移函數是否接近於真實系統。若本論文研究 方法所求得的波德圖及轉移函數能夠很接近於真實系統,則未來在設計直流有 刷馬達系統的控制器時,將可簡化其獲得未知系統轉移函數的量測過程且不 失準確的效果。 1.2 章節安排 第二章中將介紹直流有刷馬達系統量測實驗的實驗設備。第三章將會利用 第二章所架構的實驗設備實際量測直流有刷馬達系統,求得其波德圖及轉移函數。第四章則會利用本論文研究方法搭配最小平方估測法實際模擬直流有刷馬 達系統並和第三章所量測之結果做比較。第五章為本論文之結論。
第二章 實驗設備
直流有刷馬達系統量測實驗方塊圖如圖2.1所示,實驗設備包括個人電 腦、直流有刷馬達、驅動電路、編碼器、馬達驅動器、示波器(含模組)、訊號 產生器與電源供應器。針對硬體設備規格與原理依序說明如下: 訊號產生器 output 示波器 CH1 CH2 V+ OPA548 V-+ -RCL R1 R2 Vi Vo D1 D2 4 3 1 2 5 6 直流有刷馬達 編碼器 RS232 RS232 馬達 驅動器 個人電腦 電源供應器 - G + - G + 圖2.1 直流有刷馬達系統量測實驗方塊圖一、個人電腦
本量測系統採用雙核心CPU處理器(DualCore Intel Pentium D 920, 2800 MHz)搭配1GB記憶體之個人電腦,鍵盤是供吾人輸入設定參數值及命令透過 編碼器執行馬達轉速讀取;滑鼠作螢幕上的項目滑動游標選擇,利用液晶螢幕 顯示資料、數據與波形,呈現給吾人讀取與分析。
二、直流有刷馬達
本量測系統的直流有刷馬達為SANYO DENKI U718T-012EL8,圖2.2所示 為直流有刷馬達和編碼器實體圖。
三、驅動電路 直流有刷馬達驅動的基本電路圖示於圖2.3中。驅動電路共包含三個電 阻:R1、R2、RCL、兩個二極體:D1、D2及一顆運算放大器OPA548。 V+ OPA548 V-+ -RCL R1 R2 Vi Vo D1 D2 4 3 1 2 5 6 Ii Io ILIM 圖2.3 直流有刷馬達驅動電路 1. 電阻R1、R2 放大驅動電路輸入端電壓Vi,以提供足夠的驅動電路輸出端電壓Vo驅動 馬達轉動。吾人選擇R1=1KΩ、R2=2KΩ,故電壓放大倍率 R2 G R1 2 = − = − (1) ,因此本實驗系統提供馬達轉動的電壓 Vo(t)= −2Vi(t) (2)
2. 電阻RCL
RCL的功能為限制輸出電流大小,為保護負載裝置。在此處吾人選擇
RCL=10KΩ,則Io(Max)= ILIM=3A。如表2.1所示。
表2.1 OPA548 CURRENT LIMIT: 0 to 5A DESIRED CURRENT LIMIT RESISTOR (RCL) 0A ILIM Open 1A 57.6 KΩ 2.5A 14.7 KΩ 3A 10 KΩ 4A 4.02 KΩ 5A ILIM Connected to V- 資料來源:OPA548 Datasheet 3. 二極體D1、D2 D1、D2:MUR410為保護驅動電路輸出端裝置,避免遇到產生電動勢的 負載回傳負載電流到運算放大器,造成輸出電壓超越電源供應器所提供的電 壓。這種情形可以被連接輸出端和電源供應器(V+、V-)端的整流二極體避免。
4. 運算放大器 OPA548能提供高的輸出電壓及電流,很適合用來驅動馬達。它有七個接 腳,其接腳圖如圖2.4所示。如圖2.3所示:接腳1接地、接腳2連接電阻R1後再 連接訊號產生器的輸出做為驅動電路的輸入訊號、接腳3連接電阻RCL再連接接 腳4、接腳4連接電源供應器的負端(-25V)、接腳5連接電源供應器的正端 (+25V)、接腳6連接直流有刷馬達提供馬達系統驅動電壓及電流、接腳7無須使 用。 OPA548能藉由電源供應器所提供的電壓(V+、V-)產生驅動馬達足夠 的輸出電流Io,也能搭配電阻R1和R2放大輸入端的訊號做為輸出端驅動馬達 的輸出電壓Vo,使馬達轉動。並經由示波器模組(TDS2CM)在其輸入端和輸出 端的訊號擷取,可以驗證其操作性能良好,這部分將在第三章說明。圖2.5為 驅動電路實體圖。 1 2 3 4 5 6 7 Vi+ Vi-ILIM V-V+ Vo E/S 圖2.4 OPA548接腳圖
圖2.5 驅動電路實體圖 四、編碼器
編碼器(encoder) 和馬達連接在一起(如圖2.6),需和馬達的轉軸直徑大小 符合。在本實驗吾人選用翔寶電子(SHYANG BAO)所生產的光電編碼器 (Optical Encoder),其型號為ENC-22R,額定電壓為5V,解析度500ppr(Pulse Per Revolution)。
光電編碼器的工作原理:一刻有光閘之等距細縫圓板,連接馬達轉軸置於 發光二極體和受光二極體之間,隨著馬達轉軸旋轉,圓板跟著旋轉。圓板旋轉 一間距的期間,受光元件經細縫承受一次光的明暗變化,再將透光狀態轉換成 脈波訊號。此脈衝訊號再送進解碼器中計數,即可得馬達轉軸的旋轉量。
圖2.6 編碼器實體圖 五、馬達驅動器 在本實驗中,馬達驅動器是連接編碼器和個人電腦做為馬達轉速解碼器使 用。吾人選用翔寶電子(SHYANG BAO)所生產的馬達驅動器,其型號為 CSBL600G,如圖2.7。 CSBL600G 可以透過 RS232 介面與個人電腦連線,將編碼器輸出的脈波信 號輸入計數器中,計算在量測時間內所讀取之脈波數,轉換為馬達轉速(RPM, Revolutions Per Minute) 傳回電腦。
本實驗系統使用Window作業系統內附的超級終端機,再搭配撰寫的Visual Basic程式碼,即可對由RS232埠直接與個人電腦連線的馬達驅動器下執行指 令,如圖2.8。可立即的將馬達轉速數值(RPM)傳回電腦,讀取時間間格最快為
3
7 14. ×10− sec。
圖2.7 馬達驅動器實體圖
六、示波器(含模組) 示波器型號為Tektronix TDS 220,並另接介面模組(interface modules)TDS2CM(如圖2.9),此模組的主要功能是可經由RS232與個人電腦連 接,利用廠商提供的專用軟體(WaveStar)將示波器所讀取到的波形數據顯示在 螢幕上,提供吾人進行各項分析。 圖2.9 介面模組TDS2CM 七、訊號產生器
訊號產生器型號為SAMPO FG1617 Function Generator,如圖2.10。在本實 驗系統中為提供驅動電路輸入端各個輸入弦波電壓。
八、電源供應器
電源供應器型號為CIC PS-1930D,如圖2.10。在本實驗系統中為連接驅動 電路中運算放大器OPA548的接腳4和接腳5,提供-25V和+25V的直流電壓。
圖2.11為直流有刷馬達系統量測實驗的整體全貌圖。
第三章 直流有刷馬達系統量測
3.1 介紹
本量測實驗目標在於得到直流有刷馬達(SANYO DENKI U718T-012EL8) 的輸入電壓(V)對輸出轉速(RPM)的波德圖及轉移函數。吾人將在直流有刷馬 達輸入端加入五組不同振幅和不同偏壓之正弦波信號、頻率同為 0.1Hz 至 100Hz,並在輸出端馬達轉軸上讀取個別相對應的馬達轉速波形數據。接著, 將輸出馬達轉速波形做 sine curve fitting 找出代表馬達輸出轉速波形的函數, 並完成馬達系統的波德圖及求得馬達輸入電壓(V)對輸出轉速(RPM)的轉移函 數。 3.2 馬達輸入電壓信號 馬達的起始轉動電壓經過量測為 2V(-2V),所以在本實驗系統輸入信號均 調整於-3V 之後。吾人欲在直流有刷馬達輸入端(驅動電路的輸出端)輸入五組 不同振幅和不同偏壓之正弦波信號: k (3) π k k Vo (t)=A sin(2 ft)+B 其中 k=1.2.3.4.5,頻率則同為 0.1Hz 至 100Hz。 1. k=1,A =-3,B =-6,1 1 Vo (t)=(-3)sin(2 ft)+(-6)1 π 2. k=2,A =-4,B =-7,2 2 Vo (t)=(-4)sin(2 ft)+(-7)2 π 3. k=3,A =-5,B =-8,3 3 Vo (t)=(-5)sin(2 ft)+(-8)3 π 4. k=4,A =-6,B =-9,4 4 Vo (t)=(-6)sin(2 ft)+(-9)4 π
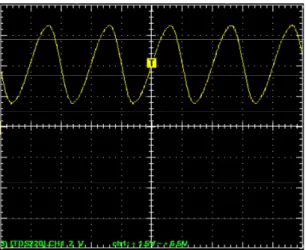
5. k=5,A =-3,B =-17,5 5 Vo (t)=(-3)sin(2 ft)+(-17)5 π 3.2.1 驅動電路輸入端信號 由圖 2.1 可知,驅動電路輸入端信號 為訊號產生器所提供。在驅動 電路中吾人選擇 R1=1KΩ、R2=2KΩ,故電壓放大倍率如(1)所求為-2,因此本 實驗系統驅動電路兩端的電壓如(2)所示,亦即 Vi(t) 1 Vi(t) Vo(t) 2 = − (4) 吾人在訊號產生器輸出五組不同振幅和不同偏壓之正弦波信號: k 1 Vi (t) Vo (t) 2 = − k (5) 其中 k=1.2.3.4.5,頻率則同為 0.1Hz 至 100Hz。 1. k=1,Vi (t)=1.5sin(2 ft)+31 π 2. k=2,Vi (t)=2sin(2 ft)+3.52 π 3. k=3,Vi (t)=2.5sin(2 ft)+43 π 4. k=4,Vi (t)=3sin(2 ft)+4.54 π 5. k=5,Vi (t)=1.5sin(2 ft)+8.55 π 如圖 2.1 所示,吾人在驅動電路輸入端連接示波器 CH1,可以準確的讀取 輸入信號 Vi 的波形,並藉由示波器模組搭配其軟體由電腦螢幕讀取並顯示 其數值。以下列舉訊號產生器輸出信號 、 和 分別由示波器 模組傳回電腦畫面所擷取之正弦波信號,如圖 3.2-1、圖 3.2-2 和圖 3.2-3。 (t) 2 Vi (t) Vi (t)3 Vi (t)4
Time(10ms) V o ltage(0.4v ) 圖 3.2-1 Vi (t)=2sin(2 11t)+3.52 π 信號圖 圖 3.2-2 Vi (t)=2.5sin(2 10t)+43 π 信號圖 圖 3.2-3 Vi (t)=3sin(2 10t)+4.54 π 信號圖
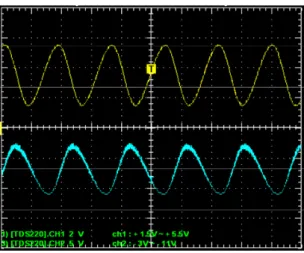
3.2.2 驅動電路輸出端信號 在本實驗系統中,驅動電路輸出端信號即為輸入直流有刷馬達之電壓信 號。如圖 2.1 所示,吾人在驅動電路輸出端連接示波器 CH2,可以準確的讀取 輸出信號 Vo 的波形,並同樣藉由示波器模組搭配其軟體由電腦螢幕讀取並 顯示其數值。以下列舉同時由示波器 CH1、CH2 讀取之驅動電路輸入信號 、 和 及輸出信號 、 和 經由示波器模組 傳回電腦畫面所擷取之正弦波信號,如圖 3.2-4、圖 3.2-5 和圖 3.2-6。 (t) 3 Vi (t) 2 Vi (t) Vi (t)4 Vo (t)2 Vo (t)3 Vo (t)4 如圖 3.2-4、圖 3.2-5 和圖 3.2-6 所示,本實驗系統可以驗證驅動電路中的 運算放大器 OPA548 其操作性能良好。
圖 3.2-4 Vi (t)=2sin(2 11t)+3.52 π 和Vo (t)=(-4)sin(2 11t)+(-7)2 π 信號圖
圖 3.2-5 Vi (t)=2.5sin(2 10t)+43 π 和Vo (t)=(-5)sin(2 10t)+(-8)3 π 信號圖
3.3 馬達輸出轉速信號 吾人將對五組不同振幅和不同偏壓之輸入馬達正弦波信號其頻率個別由 A.頻率間隔為 0.1Hz,包括 0.1Hz、0.2Hz、…至 0.9Hz。 B.頻率間隔為 1Hz,包括 1Hz、2Hz、…、至 9Hz。 C.頻率間隔為 10Hz,包括 10Hz、20Hz、…至 100Hz。 量測其輸出轉速信號,三種頻率間隔共 28 個不同頻率、合計量測 140 組資料。 接著對這 140 組輸出轉速信號波形做 Sine Curve Fitting,獲得在各個輸入電壓 信號時其相對應的輸出轉速函數。
3.3.1 判定係數 R-square
本量測實驗系統採用判定係數 R-square 來做為 Sine Curve Fitting 適合程度 的評估。以下將介紹判定係數之意涵 判定係數在不同領域有各種不同的解釋方法,但就最基本的數學原理而 言,為「預測值( )對實際值(y)之預測能力」。其數學式為: ˆy SSR R-square= SST (6) 其中 SSR (the sum of squares of the regression)為迴歸平方和(本研究採非線性最 小平方估測演算法),其數學式為: 2 1 = =
∑
n i i − i SSR w (y y) (7) 式(7)中,wi:權重,本實驗系統均設為 1; i y :非線性最小平方估測演算法之預測值;y :實際值之平均數; :取樣資料數。 n 而 SST (the total sum of squares)則為總平方和,其數學式為:
2 1 = =
∑
n i i − i SST w (y y) (8) 式(8)中,yi:實際值。 由以上三式(6)(7)(8)可知,判定係數即為迴歸平方和佔總平方和之百分 比,即代表非線性最小平方估測演算法所估測之函數可預測實際值的百分比。 又由於 SST = SSR + SSE (9) 所以,判定係數就變成 1 = − SSR SSE R-square= SST SST (10) 其中,SSE(Sum of Squares Due to Error)為誤差平方和,數學式為:2 1 = =
∑
n i i − i i SSE w (y y ) (11) 因此,由上式(9)(10)(11)可知,總平方和包含迴歸平方和及誤差平方和。 而 SSE 即代表非線性最小平方估測演算法所估測之函數無法符合實際值的誤 差項平方和,將其除以總平方和,即代表非線性最小平方估測演算法所估測之 函數無法符合實際值的百分比。以 1 減該百分比後,即為判定係數。 透過上述對判定係數之解釋可知,判定係數越接近 1,表示非線性最小平 方估測演算法所估測之函數對實際值可預測的部份越高;反之,越接近 0,則代表其對實際值可預測的部份越低。
在本研究中,判定係數用以做為非線性最小平方估測演算法 Sine Curve Fitting 適合程度的評估。判定係數越接近 1,表示所估測之函數對實際馬達輸 出轉速信號值可預測的部份越高;越接近 0,則代表所估測之函數對實際馬達 輸出轉速信號值可預測的部份越低。
3.3.2 馬達輸出轉速信號 Sine Curve Fitting
吾人對各個輸出轉速信號波形做 Sine Curve Fitting 的函數如下: 2 = π + y a sin( fx) b (12) 利用非線性最小平方估測演算法去估測出函數(12)中參數 a 和 值,使判定係 數 R-square 接近於 1。 b 以下吾人將列舉五組不同振幅和不同偏壓之輸入馬達正弦波信號其頻率 分別為 2Hz、5Hz、10Hz、20Hz、40Hz 及 50Hz 時,其輸出轉速信號波形做
Sine Curve Fitting 後所估測出的函數 y 及其判定係數 R-square 值 (如表 3.3-1
至表 3.3-5),並將函數 y 的波形和真實馬達轉速信號波形做比較(如圖 3.3-1 至
圖 3.3-5)。從圖 3.3-1 至圖 3.3-5 可以大致上得知估測出的函數 y 其波形都很吻
表 3.3-1 馬達輸入電壓信號Vo (t)=(-3)sin(2 ft)+(-6)1 π 時,各頻率所估測 出的馬達輸出轉速信號函數 y 及其判定係數 R-square 值。 Hz 馬達輸入電壓信號 馬達輸出轉速信號( y ) R-square 2 Vo (t)1 =(-3)sin(4 t)-6π y=(-99.5)sin(4 x)-219.5 π 0.9906 5 Vo (t)1 =(-3)sin(10 t)-6π y=(-86)sin(10 x)-221π 0.9832 10 Vo (t)1 =(-3)sin(20 t)-6π y=(-71)sin(20 x)-217 π 0.9802 20 Vo (t)1 =(-3)sin(40 t)-6π y=(-45)sin(40 x)-217 π 0.9579 40 Vo (t)1 =(-3)sin(80 t)-6π y=(-22.5)sin(80 x)-217.5π 0.9236 50 Vo (t)1 =(-3)sin(100 t)-6π y=(-16.5)sin(100 x)-215.5 π 0.8862 表 3.3-2 馬達輸入電壓信號Vo (t)=(-4)sin(2 ft)+(-7)2 π 時,各頻率所估測 出的馬達輸出轉速信號函數 y 及其判定係數 R-square 值。 Hz 馬達輸入電壓信號 馬達輸出轉速信號( ) y R-square 2 Vo (t)2 =(-4)sin(4 t)-7π y=(-138.5)sin(4 x)-254.5 π 0.9971 5 Vo (t)2 =(-4)sin(10 t)-7π y=(-120)sin(10 x)-255π 0.9911 10 Vo (t)2 =(-4)sin(20 t)-7π y=(-93.5)sin(20 x)-254.5 π 0.9932 20 Vo (t)2 =(-4)sin(40 t)-7π y=(-56)sin(40 x)-255 π 0.99 40 Vo (t)2 =(-4)sin(80 t)-7π y=(-26.5)sin(80 x)-254.5 π 0.9424 50 Vo (t)2 =(-4)sin(100 t)-7π y=(-20.5)sin(100 x)-253.5 π 0.9852
表 3.3-3 馬達輸入電壓信號Vo (t)=(-5)sin(2 ft)+(-8)3 π 時,各頻率所估測 出的馬達輸出轉速信號函數 y 及其判定係數 R-square 值。 Hz 馬達輸入電壓信號 馬達輸出轉速信號( ) y R-square 2 Vo (t)3 =(-5)sin(4 t)-8π y=(-174.5)sin(4 x)-290.5 π 0.9951 5 Vo (t)3 =(-5)sin(10 t)-8π y=(-152)sin(10 x)-294π 0.9891 10 Vo (t)3 =(-5)sin(20 t)-8π y=(-118)sin(20 x)-290 π 0.9934 20 Vo (t)3 =(-5)sin(40 t)-8π y=(-67.5)sin(40 x)-288.5 π 0.9894 40 Vo (t)3 =(-5)sin(80 t)-8π y=(-32)sin(80 x)-290π 0.9395 50 Vo (t)3 =(-5)sin(100 t)-8π y=(-22.5)sin(100 x)-287.5 π 0.942 表 3.3-4 馬達輸入電壓信號Vo (t)=(-6)sin(2 ft)+(-9)4 π 時,各頻率所估測 出的馬達輸出轉速信號函數 y 及其判定係數 R-square 值。 Hz 馬達輸入電壓信號 馬達輸出轉速信號( ) y R-square 2 Vo (t)4 =(-6)sin(4 t)-9π y=(-210)sin(4 x)-326π 0.9979 5 Vo (t)4 =(-6)sin(10 t)-9π y=(-182)sin(10 x)-328π 0.9936 10 Vo (t)4 =(-6)sin(20 t)-9π y=(-140.5)sin(20 x)-327.5 π 0.9844 20 Vo (t)4 =(-6)sin(40 t)-9π y=(-86.5)sin(40 x)-325.5 π 0.9749 40 Vo (t)4 =(-6)sin(80 t)-9π y=(-39.5)sin(80 x)-327.5 π 0.963 50 Vo (t)4 =(-6)sin(100 t)-9π y=(-28)sin(100 x)-328π 0.9464
表 3.3-5 馬達輸入電壓信號Vo (t)=(-3)sin(2 ft)+(-17)5 π 時,各頻率所估 測出的馬達輸出轉速信號函數 y 及其判定係數 R-square 值。 Hz 馬達輸入電壓信號 馬達輸出轉速信號( ) y R-square 2 Vo (t)5 =(-3)sin(4 t)-17π y=(-114)sin(4 x)-616 π 0.9915 5 Vo (t)5 =(-3)sin(10 t)-17π y=(-95.5)sin(10 x)-616.5π 0.9938 10 Vo (t)5 =(-3)sin(20 t)-17π y=(-75)sin(20 x)-619 π 0.9893 20 Vo (t)5 =(-3)sin(40 t)-17π y=(-47)sin(40 x)-620 π 0.9725 40 Vo (t)5 =(-3)sin(80 t)-17π y=(-20.5)sin(80 x)-616.5π 0.995 50 Vo (t)5 =(-3)sin(100 t)-17π y=(-16.5)sin(100 x)-616.5π 0.9585
10 20 30 40 50 60 70 80 90 100 -320 -300 -280 -260 -240 -220 -200 -180 -160 -140 -120 Time(7.14ms) RP M 2Hz output sine curve fitting
10 20 30 40 50 60 70 80 90 100 -300 -280 -260 -240 -220 -200 -180 -160 -140 Time(7.14ms) RP M 5Hz output sine curve Fitting
10 20 30 40 50 60 70 80 90 100 -280 -260 -240 -220 -200 -180 -160 -140 Time(7.14ms) RP M 10Hz output sine curve fitting
圖 3.3-1 馬達輸入電壓信號Vo (t)=(-3)sin(2 ft)+(-6)1 π 時,各頻率所估測
10 20 30 40 50 60 70 80 90 100 -260 -250 -240 -230 -220 -210 -200 -190 -180 -170 Time(7.14ms) RP M 20Hz output sine curve fitting
5 10 15 20 25 30 35 40 45 50 -240 -235 -230 -225 -220 -215 -210 -205 -200 -195 Time(7.14ms) 40Hz RP M output sine curve fitting
5 10 15 20 25 30 35 40 45 50 -230 -225 -220 -215 -210 -205 -200 Time(7.14ms) RP M 50Hz output sine curve fitting
圖 3.3-1 馬達輸入電壓信號Vo (t)=(-3)sin(2 ft)+(-6)1 π 時,各頻率所估測
10 20 30 40 50 60 70 80 90 100 -400 -350 -300 -250 -200 -150 Time(7.14ms) RPM 2Hz output sine curve fitting
10 20 30 40 50 60 70 80 90 100 -350 -300 -250 -200 -150 Time(7.14ms) RP M 5Hz output sine curve fitting
10 20 30 40 50 60 70 80 90 100 -340 -320 -300 -280 -260 -240 -220 -200 -180 -160 Time(7.14ms) RPM 10Hz output sine curve fitting
圖 3.3-2 馬達輸入電壓信號Vo (t)=(-4)sin(2 ft)+(-7)2 π 時,各頻率所估測
10 20 30 40 50 60 70 80 90 100 -300 -280 -260 -240 -220 -200 Time(7.14ms) RPM 20Hz output sine curve fitting
5 10 15 20 25 30 35 40 45 50 -280 -275 -270 -265 -260 -255 -250 -245 -240 -235 -230 Time(7.14ms) RP M 40Hz output sine curve fitting
5 10 15 20 25 30 35 40 45 50 -275 -270 -265 -260 -255 -250 -245 -240 -235 -230 Time(7.14ms) RPM 50Hz output sine curve fitting
圖 3.3-2 馬達輸入電壓信號Vo (t)=(-4)sin(2 ft)+(-7)2 π 時,各頻率所估測
10 20 30 40 50 60 70 80 90 100 -450 -400 -350 -300 -250 -200 -150 -100 Time(7.14ms) RPM 2Hz output sine curve fitting
10 20 30 40 50 60 70 80 90 100 -450 -400 -350 -300 -250 -200 -150 RPM 5Hz Time(7.14ms) output sine curve fitting
10 20 30 40 50 60 70 80 90 100 -400 -350 -300 -250 -200 Time(7.14ms) RPM 10Hz output sine curve fitting
圖 3.3-3 馬達輸入電壓信號Vo (t)=(-5)sin(2 ft)+(-8)3 π 時,各頻率所估測
10 20 30 40 50 60 70 80 90 100 -360 -340 -320 -300 -280 -260 -240 -220 Time(7.14ms) RP M 20Hz output sine curve fitting
5 10 15 20 25 30 35 40 45 50 -320 -310 -300 -290 -280 -270 -260 Time(7.14ms) 40Hz RP M output sine curve fitting
5 10 15 20 25 30 35 40 45 50 -310 -305 -300 -295 -290 -285 -280 -275 -270 -265 Time(7.14ms) RPM 50Hz output sine curve fitting
圖 3.3-3 馬達輸入電壓信號Vo (t)=(-5)sin(2 ft)+(-8)3 π 時,各頻率所估測
10 20 30 40 50 60 70 80 90 100 -550 -500 -450 -400 -350 -300 -250 -200 -150 -100 Time(7.14ms) RPM 2Hz output sine curve fitting
10 20 30 40 50 60 70 80 90 100 -500 -450 -400 -350 -300 -250 -200 -150 Time(7.14ms) RP M 5Hz output sine curve fitting
10 20 30 40 50 60 70 80 90 100 -450 -400 -350 -300 -250 -200 Time(7.14ms) RPM 10Hz output sine curve fitting
圖 3.3-4 馬達輸入電壓信號Vo (t)=(-6)sin(2 ft)+(-9)4 π 時,各頻率所估測
10 20 30 40 50 60 70 80 90 100 -420 -400 -380 -360 -340 -320 -300 -280 -260 -240 Time(7.14ms) RP M 20Hz output sine curve fitting
5 10 15 20 25 30 35 40 45 50 -370 -360 -350 -340 -330 -320 -310 -300 -290 Time(7.14ms) RPM 40Hz output sine curve fitting
5 10 15 20 25 30 35 40 45 50 -350 -340 -330 -320 -310 -300 Time(7.14ms) RP M 50Hz output sine curve fitting
圖 3.3-4 馬達輸入電壓信號Vo (t)=(-6)sin(2 ft)+(-9)4 π 時,各頻率所估測
10 20 30 40 50 60 70 80 90 100 -700 -650 -600 -550 -500 Time(7.14ms) RPM 2Hz output sine curve fitting
10 20 30 40 50 60 70 80 90 100 -720 -700 -680 -660 -640 -620 -600 -580 -560 -540 -520 Time(7.14ms) RPM 5Hz output sine curve fitting
10 20 30 40 50 60 70 80 90 100 -700 -680 -660 -640 -620 -600 -580 -560 -540 Time(7.14ms) RPM 10Hz output sine curve fitting
圖 3.3-5 馬達輸入電壓信號Vo (t)=(-3)sin(2 ft)+(-17)5 π
y
時,各頻率所估 測出的馬達輸出轉速信號函數 和真實馬達轉速信號波形比較圖。
10 20 30 40 50 60 70 80 90 100 -670 -660 -650 -640 -630 -620 -610 -600 -590 -580 -570 Time(7.14ms) RPM 20Hz output sine curve fitting
5 10 15 20 25 30 35 40 45 50 -635 -630 -625 -620 -615 -610 -605 -600 -595 Time(7.14ms) RP M 40Hz output sine curve fitting
5 10 15 20 25 30 35 40 45 50 -630 -625 -620 -615 -610 -605 -600 Time(7.14ms) RPM 50Hz output sine curve fitting
圖 3.3-5 馬達輸入電壓信號Vo (t)=(-3)sin(2 ft)+(-17)5 π
y
時,各頻率所估 測出的馬達輸出轉速信號函數 和真實馬達轉速信號波形比較圖。(續)
3.4 馬達系統波德圖及轉移函數 在求出馬達不同輸入正弦波電壓信號,其輸出轉速波形的函數後,即可完 成馬達系統的波德圖及求得馬達輸入電壓(V)對輸出轉速(RPM)的轉移函數。 如圖 3.4-1 所示,馬達輸入電壓信號如式(3),其中 k=1.2.3.4.5;馬達輸出 轉速信號如式(12),頻率 f 分別為 0.1Hz 至 100Hz。 π k k k
Vo (t)=A sin(2 ft)+B y = a sin(2πfx) + b
Brush DC Motor 圖 3.4-1 輸入電壓和輸出轉速的馬達系統 在本實驗系統中,令[2] = k k a G (jw) A (13) 其中 2 = π w f (rad/sec) (14) 接著利用 10 20 = k,w k (dB) log G (jw) (dB) (15) 計算出在同一 k 值時,所有不同頻率的 值。再將 對頻率作圖,其 中頻率採對數刻度,則可分別完成 k=1.2.3.4.5 時之波德大小圖。 k,w (dB) (dB)k,w
由第三章的 3.2.2 節可知,在本實驗系統中馬達輸入端連接示波器 CH2, 可以準確的讀取馬達輸入電壓信號 的波形,並藉由示波器模組由電腦螢 幕顯示其數值。由第二章可知,在馬達輸出端的輸出轉速信號則可由馬達驅動 器搭配超級終端機,利用所撰寫的 Visual Basic 程式碼,立即將轉速數值傳回 電腦。 Vo(t) 本實驗系統將同時讀取到的輸入電壓信號波形和輸出轉速信號波形做分 析[3],可計算出在同一 k 值下,各個不同頻率的輸出轉速信號波形其相位落 後輸入電壓信號波形的角度值,再將其對頻率作圖,其中頻率採對數刻度,則 可分別完成 k=1.2.3.4.5 時之波德相位圖。 圖 3.4-2 為本實驗直流有刷馬達系統量測而得的波德圖(Bode Plot),並由 波德圖可知直流有刷馬達系統輸入電壓(V)對輸出轉速(RPM)的轉移函數為 36 3 1 1 2 8 2 50 = + + π π . H(s) s s ( )( ) (16) 36 3 1 1 50 2655 314 1593 = + + . s s ( )( . . ) (17) 極點的位置落在 8Hz 和 50Hz。 轉移函數亦可表示為 2 573226 8869 364 4248 15791 3743 = + + . H(s) s . s . (18)
22 24 26 28 30 32 Magni tu de (dB ) 100 101 102 -135 -90 -45 0 P has e ( deg) Bode Diagram Frequency (rad/sec) 圖 3.4-2 直流有刷馬達系統波德圖
第四章 實際模擬與比較
在本章節中,吾人將會利用最小平方估測法,來計算本實驗系統中直流有 刷馬達系統轉移函數的參數估測值,接著將估測的系統轉移函數所模擬的輸出 跟真實系統的輸出做比較。最後再將其波德圖和第三章所量測而得真實系統的 波德圖做比較。 由於本量測實驗所擷取的資料是以離散的方式來儲存,所以本研究將會以 離散時間系統來表示本研究所要求的系統,在 4.1 節中所介紹的最小平方估測 之演算法即是以離散時間系統為基礎的演算法[4]。 4.1 定理及演算法 4.1.1 線性差分方程式 單一輸入和單一輸出(SISO)的離散系統,如圖 4.1-1 所示U(k) Linear Discrete Y(k)
System 圖 4.1-1 單一輸入和單一輸出(SISO)的離散系統 其 n 階線性差分方程式可以表示如下: 1 0 1 1 1 n n
y(k) a y(k ) a y(k n)
b u(k) b u(k ) b u(k n)
+ − + + − = + − + + − " " (19) 或 1 0 n n j j j j
y(k) a y(k j) b u(k j)
= =
其中 y 是系統的輸出, 是系統的輸入, k 是整數時間, u 1 n a "a 、b 、0 b1"bn是系統的參數。 若令 q 為位移運算子則 1 1 q y(k)− = y(k − ) (21) 且 1 1 2 1 2 1 n n A(q )− = + a q− + a q− + " + a q− − 1 (22) 1 1 2 0 1 2 n n B(q )− = b + b q− + b q− + " + b q (23) 則方程式(19)可表示成下面的形式 1
A(q )y(k)− = B(q )u(k)− (24) 接著我們對方程式(19)取 Z-轉換,並且假設初始狀況為零 0 y(k) = u(k) = ,k < (25) 0 將可獲得下面的式子: 1 2 1 2 1 2 0 1 2 1 n n n n ( a z a z a z )Y(z) (b b z b z b z )U(z) − − − − − − + + + + = + + + + " " (26) 其中 z 是 Z-轉換的變數。 因此轉移函數將可被定義為 1 2 0 1 2 1 2 1 2 1 n n n n b b z b z b z Y(z) H(z) U(z) a z a z a z − − − − − + + + + = = + + + + " " − (27)
4.1.2 最小平方估測法 考慮下面系統的數學模式 1 1 1 1 n m
y(k) a y(k ) a y(k n)
b u(k ) b u(k m) + − + + − = − + + − " " (28) 其中 y 是系統的輸出, 是系統的輸入, k 是整數時間, u 1 n a "a 、b1"bm是系統的參數。 可將方程式(28)表示為 1 1 1 1 1 1 1 1 n m n m
y(k) a y(k ) a y(k n) b u(k ) b u(k m)
a
a
y(k ) y(k n) u(k ) u(k m)
b b = − − − − − + − + + − ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ = −⎡⎣ − − − − − ⎤⎦ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ " " # " " # T (k) = ϕ θ (29) 假設 1 2 T Y(k) = ⎡⎣y( ) y( ) " y(k)⎤⎦ (30) 1 T T ( ) (k) (k) ⎡ϕ ⎤ ⎢ ⎥ ⎢ ⎥ Φ = ⎢ ⎥ ⎢ϕ ⎥ ⎣ ⎦ # (31)
寫成矩陣的形式為 Y = Φ θ (32) 其中 Y 是系統的輸出向量,Φ 是已知的系統資料向量,而 則是未知且要估測 的參數向量。 θ 最小平方估測法是找出一組參數使得實際所量測到的輸出與經由假設之 數學模式所得到的輸出兩者的誤差平方和為最小。所以,參數 的選取是要使 下面的函數最小化 θ 2 1 1 2 k i F( ,k) (y(i) y(i)) = θ =
∑
− (33)其中 y(i)是實際量測所得到的輸出值,y(i)是根據假設之數學模式所得到的輸
出值。
定義誤差值如下
θ (34)
T
(i) y(i) y(i) y(i) (i)
ε = − = − ϕ 則方程式(33)可寫成 2 2 1 1 1 2 2 k T i F( ,k) (i) E E E = θ =
∑
ε = = 1 2 (35) 其中 E = Y − Y = Y − Φ θ (36)使方程式(33)最小化之參數 θ滿足 0 1 2 1 0 2 0 T T T T T T T T F( ,k) F( ,k) (Y ) (Y ) (Y )(Y ) Y Y θ = θ θ = θ θ = θ θ = θ ∂ θ = ∂ θ ∂ θ ∂ ⎡ ⎤ ⇒ = ⎢ − Φθ − Φθ ⎥ ∂ θ ∂ θ ⎣ ⎦ ∂ ⎡ ⎤ = ⎣ − θ Φ − Φθ ⎦ ∂ θ ⇒ − Φ + Φ Φθ = ⇒ Φ Φθ = Φ = T Y 若矩陣Φ ΦT 是非奇異的矩陣,則 1 T ( )− θ = Φ Φ Φ (37) 即為最小平方估測之演算法。 4.2 最小平方估測法的模擬 4.2.1 輸入及輸出信號 吾人將從第三章的 140 組量測數據中,挑選頻率分別為 1Hz 及 10Hz 之任 意兩組輸入馬達正弦波電壓信號和其輸出馬達轉速信號,並利用最小平方估測 法來模擬本實驗系統中的直流有刷馬達(SANYO DENKI U718T-012EL8)。 最小平方估測演算法其系統輸入電壓信號如下所示 1 1 2 1 k f Hz k f u(t) = Vo (t) = + Vo (t) = 0Hz 1 + k2 1 2 2 20 k k k A sin( t) A sin( t) B B = π + π + (38) 其中k1=1.2.3.4.5,k2=1.2.3.4.5。 其系統輸出轉速信號則為其相對應的輸入電壓信號所量測而的輸出轉速信號
相加。 由方程式(38)可知,最小平方估測演算法其輸入及輸出信號主要可分為 = 兩種情況。吾人將在k = k 和1 k1 1 k 2 k 和k1≠k2 2 ≠k 兩種情形下,各選擇四組(共2 八組)資料,當作最小平方估測演算法的系統輸入信號和輸出信號資料。 4.2.2 直流有刷馬達系統架構 經過第三章直流有刷馬達系統量測後得知道此馬達系統是一個 2 階的離 散時間系統,我們定義如下[5]: 1 2 2 1 2 b z b Y(z) H(z) U(z) z a z a + = = + + (39) 其中 Y(z)是系統的輸出,U(z)是系統的輸入, 1 a 、 a 、 2 2 b 、1 b2是未知的參數估測值。 方程式(39)可以化簡成如下所示 1 2 1 2 1 2 1 2 1 ( + a z− + a z )Y(z)− = (b z− + b z )U(z)− (40) 方程式(40)可轉換成差分方程式 1 1 2 2 1 1 2
可將方程式(41)表示為 1 2 1 2 1 2 1 2 1 2 1 1 2 1 2
y(k) a y(k ) a y(k ) b u(k ) b u(k )
a a
y(k ) y(k ) u(k ) u(k )
b b = − − − − + − + − ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ = −⎡⎣ − − − − − ⎤⎦ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ 2 = ϕ θT (42) 再來將 4.2.1 節所選取之馬達系統的輸入和輸出資料代入方程式(42)中去 求出 y 和 的值,接著將這些資料代入方程式(30)(31)中,可求得 和 這兩個矩陣。利用 Y 和 (k) ) ϕ Y(k) (k Φ (k) Φ(k)這兩個矩陣,代入最小平方估測演算法(37) 中,可求得 1 2 1 2 a a b b ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ θ = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ 在求得上面的參數估測值後,接下來吾人將利用上面所求的參數估測值實 際的去模擬輸出波形,然後比較模擬的輸出波形是否符合馬達系統真實的輸出 波形,並將其判定係數 R-square 值求出。最後再將估測出的系統轉移函數其 波德圖和真實系統的波德圖做比較。 4.2.3 模擬與比較 本研究分別就方程式(38)中k =1 k 和2 k1≠k 兩種情況下去做模擬與比較。 2
1. 當k =1 時, k = 2 k (1) 1 k2=2 2 f 1Hz 2 f 1 Hz u(t) = Vo (t) = + Vo (t) = 0 2 4) 2 2 2 20 2 4 2 4 20 1 A sin( t) A sin( t) B B ( ) sin( t) ( ) sin( t) ( = π + π + + = − π + − π + − 最小平方估測演算法參數估測值 1 2 1 2 a -1.0108 a -0.3097 b 19.5373 -31.1615 b ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ θ = = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢⎣ ⎥⎦ ⎣ ⎦ 其模擬的輸出波形和真實的輸出波形如圖 4.2-1 所示,波德圖如圖 4.2-2 所示。 (2) k =1 k2=3 3 f 1Hz 3 f 1 Hz u(t) = Vo (t) = + Vo (t) = 0 3 6 3 2 3 20 3 5 2 5 20 1 A sin( t) A sin( t) B B ( ) sin( t) ( ) sin( t) ( ) = π + π + + = − π + − π + − 最小平方估測演算法參數估測值 1 2 1 2 a -0.7746 a -0.5834 b 24.9569 -37.9760 b ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ θ = = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢⎣ ⎥⎦ ⎣ ⎦ 其模擬的輸出波形和真實的輸出波形如圖 4.2-3 所示,波德圖如圖 4.2-4 所示。
(3) k =1 k2=4 4 f 1Hz 4 f 1 Hz u(t) = Vo (t) = + Vo (t) = 0 4 8 4 2 4 20 4 6 2 6 20 1 A sin( t) A sin( t) B B ( ) sin( t) ( ) sin( t) ( ) = π + π + + = − π + − π + − 最小平方估測演算法參數估測值 1 2 1 2 a -1.1906 a -0.1562 b 15.9889 -28.4907 b ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ θ = = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢⎣ ⎥⎦ ⎣ ⎦ 其模擬的輸出波形和真實的輸出波形如圖 4.2-5 所示,波德圖如圖 4.2-6 所示。 (4) k =1 k2=5 5 f 1Hz 5 f 1 Hz u(t) = Vo (t) = + Vo (t) = 0 5 4 5 2 5 20 5 3 2 3 20 3 A sin( t) A sin( t) B B ( ) sin( t) ( ) sin( t) ( ) = π + π + + = − π + − π + − 最小平方估測演算法參數估測值 1 2 1 2 a -0.8767 a -0.5483 b 21.4491 -36.9193 b ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ θ = = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢⎣ ⎥⎦ ⎣ ⎦ 其模擬的輸出波形和真實的輸出波形如圖 4.2-7 所示,波德圖如圖 4.2-8 所示。
u(t)=(-4)sin(2*pi*t)+(-4)sin(20*pi*t)-14 -25 -20 -15 -10 -5 0 1 21 41 61 81 Time(7.14ms) Vo lt ag e(v ) input output -800 -700 -600 -500 -400 -300 -200 -100 0 1 21 41 61 81 Time(7.14ms) RP M output simulation 圖 4.2-1 k =1 k2=2 模擬比較圖(R-square=0.9209) 10-1 100 101 102 22 23 24 25 26 27 28 29 30 31 32 33 Ma gni tude (d B ) Bode Diagram Frequency (rad/sec) 圖 4.2-2 k =1 k2=2 波德圖
u(t)=(-5)sin(2*pi*t)+(-5)sin(20*pi*t)-16 -30 -25 -20 -15 -10 -5 0 1 21 41 61 81 Time(7.14ms) Vol ta ge (v) input output -1000 -900 -800 -700 -600 -500 -400 -300 -200 -100 0 1 21 41 61 81 Time(7.14ms) RP M output simulation 圖 4.2-3 k =1 k2=3 模擬比較圖(R-square=0.8870) 10-1 100 101 102 22 23 24 25 26 27 28 29 30 31 32 33 Ma gni tude (d B ) Bode Diagram Frequency (rad/sec) 圖 4.2-4 k =1 k2=3 波德圖
u(t)=(-6)sin(2*pi*t)+(-6)sin(20*pi*t)-18 -35 -30 -25 -20 -15 -10 -5 0 1 21 41 61 81 Time(7.14ms) Vo lt ag e (v ) input output -1200 -1000 -800 -600 -400 -200 0 1 21 41 61 81 Time(7.14ms) RPM output simulation 圖 4.2-5 k =1 k2=4 模擬比較圖(R-square=0.8855) 10-1 100 101 102 22 23 24 25 26 27 28 29 30 31 32 33 Ma gni tude (d B ) Bode Diagram Frequency (rad/sec) 圖 4.2-6 k =1 k2=4 波德圖
u(t)=(-3)sin(2*pi*t)+(-3)sin(20*pi*t)-34 -45 -40 -35 -30 -25 -20 -15 -10 -5 0 1 21 41 61 81 Time(7.14ms) Vo lt ag e( v) input output -1600 -1400 -1200 -1000 -800 -600 -400 -200 0 1 21 41 61 81 Time(7.14ms) RPM output simulation 圖 4.2-7 k =1 k2=5 模擬比較圖(R-square=0.8708) 10-1 100 101 102 22 23 24 25 26 27 28 29 30 31 32 33 Ma gni tude (d B ) Bode Diagram Frequency (rad/sec) 圖 4.2-8 k =1 k2=5 波德圖
2. 當k1 ≠k2時, (1) k1=2,k2=3 2 f 1Hz 3 f 1 Hz u(t) = Vo (t) = + Vo (t) = 0 3 5 2 2 3 20 2 4 2 5 20 1 A sin( t) A sin( t) B B ( ) sin( t) ( ) sin( t) ( ) = π + π + + = − π + − π + − 最小平方估測演算法參數估測值 1 2 1 2 a -0.7298 a -0.6250 b 26.2406 -39.0965 b ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ θ = = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢⎣ ⎥⎦ ⎣ ⎦ 其模擬的輸出波形和真實的輸出波形如圖 4.2-9 所示,波德圖如圖 4.2-10 所示。 (2) k1=3,k2=2 3 f 1Hz 2 f 1 Hz u(t) = Vo (t) = + Vo (t) = 0 2 5 3 2 2 20 3 5 2 4 20 1 A sin( t) A sin( t) B B ( ) sin( t) ( ) sin( t) ( ) = π + π + + = − π + − π + − 最小平方估測演算法參數估測值 1 2 1 2 a -1.0051 a -0.3207 b 19.4387 -31.2958 b ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ θ = = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢⎣ ⎥⎦ ⎣ ⎦ 其模擬的輸出波形和真實的輸出波形如圖 4.2-11 所示,波德圖如圖 4.2-12 所 示。
(3) k1=3,k2=4 3 f 1Hz 4 f 1 Hz u(t) = Vo (t) = + Vo (t) = 0 4 7 3 2 4 20 3 5 2 6 20 1 A sin( t) A sin( t) B B ( ) sin( t) ( ) sin( t) ( ) = π + π + + = − π + − π + − 最小平方估測演算法參數估測值 1 2 1 2 a -1.1892 a -0.1551 b 15.2021 -27.7439 b ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ θ = = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢⎣ ⎥⎦ ⎣ ⎦ 其模擬的輸出波形和真實的輸出波形如圖 4.2-13 所示,波德圖如圖 4.2-14 所 示。 (4) k1=4,k2=3 4 f 1Hz 3 f 1 Hz u(t) = Vo (t) = + Vo (t) = 0 3 7 4 2 3 20 4 6 2 5 20 1 A sin( t) A sin( t) B B ( ) sin( t) ( ) sin( t) ( ) = π + π + + = − π + − π + − 最小平方估測演算法參數估測值 1 2 1 2 a -0.8395 a -0.5154 b 23.4105 -36.3682 b ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ θ = = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢⎣ ⎥⎦ ⎣ ⎦ 其模擬的輸出波形和真實的輸出波形如圖 4.2-15 所示,波德圖如圖 4.2-16 所 示。
u(t)=(-4)sin(2*pi*t)+(-5)sin(20*pi*t)-15 -30 -25 -20 -15 -10 -5 0 1 21 41 61 81 Time(7.14ms) Vo lt ag e( v) input output -900 -800 -700 -600 -500 -400 -300 -200 -100 0 1 21 41 61 81 Time(7.14ms) RPM output simulation 圖 4.2-9 k1=2,k2=3 模擬比較圖(R-square=0.8976) 10-1 100 101 102 22 23 24 25 26 27 28 29 30 31 32 33 Ma gni tude (d B ) Bode Diagram Frequency (rad/sec) 圖 4.2-10 k1=2,k2=3 波德圖
u(t)=(-5)sin(2*pi*t)+(-4)sin(20*pi*t)-15 -30 -25 -20 -15 -10 -5 0 1 21 41 61 81 Time(7.14ms) Vo lt ag e (v ) input output -900 -800 -700 -600 -500 -400 -300 -200 -100 0 1 21 41 61 81 Time(7.14ms) RP M output simulation 圖 4.2-11 k1=3,k2=2 模擬比較圖(R-square=0.9026) 10-1 100 101 102 22 23 24 25 26 27 28 29 30 31 32 33 Ma gni tude (d B ) Bode Diagram Frequency (rad/sec) 圖 4.2-12 k1=3,k2=2 波德圖
u(t)=(-5)sin(2*pi*t)+(-6)sin(20*pi*t)-17 -30 -25 -20 -15 -10 -5 0 1 21 41 61 81 Time(7.14ms) Vo lt ag e( v) input output -1000 -900 -800 -700 -600 -500 -400 -300 -200 -100 0 1 21 41 61 81 Time(7.14ms) RP M output simulation 圖 4.2-13 k1=3,k2=4 模擬比較圖(R-square=0.8740) Bode Diagram Frequency (rad/sec) 10-1 100 101 102 22 23 24 25 26 27 28 29 30 31 32 33 Ma gni tude (d B ) 圖 4.2-14 k1=3,k2=4 波德圖
u(t)=(-6)sin(2*pi*t)+(-5)sin(20*pi*t)-17 -30 -25 -20 -15 -10 -5 0 1 21 41 61 81 Time(7.14ms) V olt ag e( v) input output -1000 -900 -800 -700 -600 -500 -400 -300 -200 -100 0 1 21 41 61 81 Time(7.14ms) RP M output simulation 圖 4.2-15 k1=4,k2=3 模擬比較圖(R-square=0.8954) Bode Diagram Frequency (rad/sec) 10-1 100 101 102 22 23 24 25 26 27 28 29 30 31 32 33 Ma gni tude (d B ) 圖 4.2-16 k1=4,k2=3 波德圖
4.3 模擬結果的比較 由 4.2.3 節中圖 4.2-1 到圖 4.2-16 可知,利用最小平方估測法求得的參數 估測值,所模擬的馬達輸出波型都很吻合實際馬達系統所量測而得的真實輸出 波型。在本節中,吾人將比較圖 4.2-1 到圖 4.2-16 中八組經過參數估測所得的 波德圖和第三章經過實際量測而得的直流有刷馬達系統波德圖,如圖 4.3-1 所 示。 Bode Diagram Frequency (rad/sec) 10-1 100 101 102 22 23 24 25 26 27 28 29 30 31 32 33 Magni tude ( dB ) real 圖4.2-2 圖4.2-4 圖4.2-6 圖4.2-8 圖4.2-10 圖4.2-12 圖4.2-14 圖4.2-16 圖 4.3-1 波德圖比較 由圖 4.3-1 可知,本研究方法所估測出的直流有刷馬達系統波德圖和第三 章經過實際量測而得的直流有刷馬達系統波德圖其低頻和中頻部分(頻率小於 60rad/sec)非常的接近,高頻部分(頻率大於 60rad/sec)則會產生較大的誤差。
第五章 結論
由第三章的量測過程可知,要得到一個未知的直流有刷馬達系統之真實轉 移函數及波德圖,在同一 k 值下需經過三種頻率間隔共 28 個不同頻率的量測。 在本研究中,驗證出在低頻和中頻 (頻率小於 60rad/sec)的情況下,若設計控 制器時,僅需在頻率分別為 1Hz 和 10Hz 時量測兩次資料,並搭配最小平方估 測法即可有效率且不失準確的獲得未知的直流有刷馬達系統之真實轉移函數 及波德圖。同時,也得知即使在頻率分別為 1Hz 和 10Hz 時,所提供的輸入信 號其振幅或偏壓有所不同,也不會影響其準確性。 不過,利用本研究方法估測而得的波德圖和真實系統的波德圖可以發現在 高頻部分(頻率大於 60rad/sec)產生了較大的誤差。因此,目前本研究結果僅可 適用於低頻和中頻 (頻率小於 60rad/sec)的情況下。在未來的研究中,可以朝 向該如何在有效率的獲得未知直流有刷馬達系統的轉移函數及波德圖的情形 下,提升其高頻部分的準確度,以此為目標做進一步的研究與討論。參考文獻
[1] T. C. Hsia, System Identification: Least-Squares Methods, Lexington Books, University of California, Davis, 1979.
[2] Gene F. Franklin, et al., Feedback control of dynamic systems, 3rd Edition, Addison-Wesley, 1994.
[3]王宜楷,直流伺服控制系統,今古文化,台北,民國 84 年。
[4]洪朝瀛,「印表機馬達系統之系統判別」,國立交通大學,碩士論文,民國
94 年。
[5] Benjamin C.Kuo, Digital Control Systems, Central Book Company, Taipei, 1981.