An ATM
Traffic Shaper
for
Delay-Sensitive and
Delay-Insensitive VBR Serv:ices*
Mingfu Li
Dept. of Electrical Engineering,
Rm.
554
National Taiwan University,
Taipei, Taiwan,
R.O.C.
Imf @eagle.
ee.nt
u
.edu
,t
w
Abstract
W e propose a n ATM traffic shaper f o r shaping m u l - tiple delay-sensitive and delay-insensitive VBR cel- l streams simultaneously, w i t h a shaping m e c h a n i s m following t h e definition o f GCRA algorithm. B y us-
ing a feedback m e c h a n i s m between t h e regulator and t h e scheduler, t h e o u t p u t streams are strictly conforming. In order t o achieve best performance, w e employ t h e Earliest-Due-Date ( E D D ) discipline t o resolve cell e- m i s s i o n conflicts. T h e call a d m i s s i o n control condition and t h e cell delay bound f o r both classes of VBR t r a f i c are derived. S i m u l a t i o n results demonstrate t h a t t h e proposed traffic shaper c a n provide different levels of
QoS (delay bound) guarantees f o r delay-sensitive and delay-insensitive t r a f i c .
1.
Introduction
Since the traffic management of ATM networks became an important research area, various traffic shapers or cell spacing devices have been proposed to reduce the burstiness of the VBR traffic [l, 2, 31. The operation of a typical traffic shaper or cell spacer is t o store the in- put cells in the buffer and then output them at eligible time or theoretical departure time. Traffic shapers can be placed in a terminal with an ATM interface card, in the network edge ATM switch or gateway, or as an independent network device. In [I, 21, traffic shapers
or cell spacers are designed according to the socalled Virtual-Scheduling Algorithm (VSA) t o reduce the cell delay variation (CDV) due to queueing in multiplexing nodes. In [3], Brochin employs a cell spacing device to prevent any two successive cells from being transmit-
*This work was supported by National Science Council of the Republicof China under Grants NSC 86-2215-E002-033 and NSC 87-2215-E002-024.
Zsehong Tsai
Dept.
of Electrical Engineering, Rm.
543
National Taiwan University,
Taipei, Titiwan,
R.O.C.
et [email protected]
u
.
edu. t
w
ted within a time shorter than a variable value. In [4],
traffic shapers are designed t o increase the connection- carrying capacity and provide different QoS guarantees for various traffic types.
In most of these papers, the assumed models include multiple traffic streams passing through separate cell spacing devices and a second-stage multiplexer before output. Since the impact of the multiplexer on the output traffic usually is not taken into account, the output cell streams may be non-conforming due to e-
mission conflicts within the multiplexer, regardless the
fact that the cell streams observed at the output of s-
pacing devices are conforming. In other words, such emission conflicts are likely to lead to the unnecessary peak cell rate, sustainable cell rate, or burst tolerance violation when cells are transmitted to the ATM out- put link. In practice, Generic Cell Rate Algorithm (GCRA) based UPC inechanism may be implement- ed a t the other side of the User-Network Interface (U- NI) or Network-Node [nterface ("1). At these UPC devices, non-conforming cells may be tagged as low pri-
ority or be discarded and lead to unnecessary cell losses. It reveals that the multiplexer should be modeled w a component of the traffic shaper such that the impact of cell output conflict can be resolved.
Only in [5], the feedback mechanism is employed be-
tween the regulator (the cell spacer) and the output scheduler (multiplexier) in the GCRA traffic shaper proposed by Li and Tsai. With such design, the output cell streams were found t o be strictly conforming to the GCRA algorithm. Although in the latter approach, we have solved the cell emission conflict problem in traf- fic shaping, additional issues remain t o be resolved. In the previous GCRA traffic shaper model [5], all VBR streams are treated only as the same class traffic, al- though in certain multimedia high-speed networks, d- ifferent levels of QoS are designed. For example, voice and video traffic usualhy are more sensitive t o delay or
588 0-8186-7225-0198 $10.00 0 1998 IEEE
delay jitter when transported across the network, while data transfer should be less sensitive for network delay. Obviously, the design of traffic shaper to support mul- tiple levels of QoS remain t o be investigated.
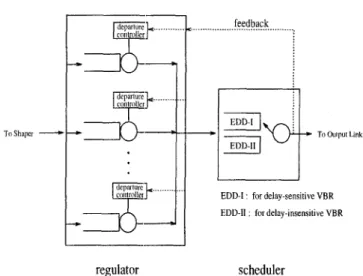
Motivated by such challenge, we proposed a GCRA traffic shaper which can shape delay-senstive and delay-insensitive incoming VBR traffic streams simul- taneously, as shown in Fig. 1. The regulator of the shaper is responsible for determining the appropriate cell departure time for all virtual connections, while the scheduler is used t o provide differentiated QoS for delay-sensitive and delay-insensitive traffic. Since the shaping delay is related to both the input and output traffic descriptors, we first derive the call admission control condition to guarantee the shaper performance and then analyze the total shaping delay bound later.
The rest of this paper is organized as follows. Sec- tion 2 defines the traffic model. Section 3 describes the design of the GCRA traffic shaper. In Section 4, the delay bound of the GCRA traffic shaper is derived. In Section 5, the proposed GCRA traffic shaper is demon- strated by numerical examples. Conclusions are finally made in Section 6.
2.
The Traffic
Model
The concept of traffic specification in the ATM Fo-
rum UN1 Specification [6] is used t o define the traffic descriptor ( X , T , T ) for each virtual connection (VC). Here, X indicates the minimum cell interarrival time,
which corresponds t o the peak cell rate parameter if CDVT (Cell Delay Variation Tolerance) is zero, and T
represents the minimum average cell interarrival time. Note that the inverse of T is equivalent to the sustain- able cell rate. The burst tolerance T is the maximal amount of time that is allowed for the actual cell ar- rival to be earlier than the cell arrival time theoretically predicted, under the assumption that any two consec- utive cells are separated by the interval T . The latter burst tolerance parameter T is identical t o that defined
in Forum's GCRA definition [6]. In other words, the traffic descriptor
( X ,
T , T ) indicates the following traf- fic characteristics of a cell stream: regarding the sus-tainable cell rate, the cell stream conforms to GCRA
( T , T ) ; when the peak cell rate is concerned, the cell interarrival time is strictly larger or equal to X , i.e., conforms to GCRA(X, 0).
Hereafter, the total number of active VBR connec- tions is assumed t o be G and the number of active delay-sensitive VBR connections is assumed to be g,
where G
2
g. The desired output traffic descriptorof VC-j is specified as ( X j , q , ~ j ) , where VC-j is a
delay-sensitive VBR connection if 1
5
j5
g and it isI
j-G+ ...1
... feedback ...;I -A I
P A 1 I
I-
I
I
EDD-I ' fur delay-sensitive VBR
EDD-II : fur delayinsensitive VBR
regulator scheduler
Figure 1: The model of the GCRA traffic shaper.
a delay-insensitive V:BR connection if g
+
15
j5
G .3.
The
GCIRA
Traffic Shaper
3.1.
GCRA
Traffic
Shaper
Model
We extend the traffic shaper model in [5] t o support delay-sensitive and delay-insensitive traffic, as shown in Fig. 1. The regulator consists of several departure con- trollers. Each deparfure controller regulates the peak cell rate, sustainable cell rate and burst tolerance for one VC according t o its individual output traffic de- scriptor. The operation of the traffic shaper follows a
discrete time-axis, 011 which the normalized cell emis-
sion time is called a time slot. If a cell arrives early, the regulator will stop it in the buffer. This cell then enters the scheduler at its eligible time. The scheduler is responsible for reiiolving the emission conflicts be- tween cells from different VCs and transmits cells to the network. The scheduler consists two EDD queues, EDD-I and EDD-11. EDD-I is for delay-sensitive traffic and EDD-I1 is for delay-insensitive traffic. The cells in EDD-I has higher priority t o be emitted than the cells in EDD-11. While a cell reaches the HOL (Head of Line) position in the EDD queues, it can be transmitted at
the beginning of the next slot at the earliest. Hence, the minimum sojourn time at the scheduler for any cell is one slot. In order to prevent the cell emissions from violating the output traffic descriptor, there ex- ists a feedback signal from the scheduler t o the GCRA mechanism within the regulator. This assures that the calculation of the eligible time of the next cell emis- sion of the same VC is always done after the receipt of the feedback signal triggered by the current emission. Therefore, there can be at most one cell in the sched-
uler for each VC at any time. The buffer size in the scheduler is thus determined by the maximal number of VCs that the GCRA traffic shaper is designed t o support.
3.2.
In order to describe the shaping algorithm in the reg- ulator in detail, some control variables for shaped con- nections are defined as follows. For VC-j, the k-th cell arrives at the shaper (or regulator) at time A j ( k )
and is buffered until the Eligible Time ETj(L) before it enters the scheduler. It is then given an Initial Due- Date I D D j ( k ) when it enters the scheduler. The tar-
get time for this cell to leave the scheduler is called the Theoretical Departure Time T D T , ( k ) . However, the
time epoch when it leaves the scheduler could be dif- ferent. We call such time epoch the Actual Departure Time, and denote it as ADTj(k). Note that the vari- ables Aj(k), E T j ( k ) , and ADTj(k) are integers, while
TDTj(IC) and I D D j ( k ) may be not. During the opera-
tion of the traffic shaper, these variables are calculated by the following iterative forms.
T D T j ( k ) = max{ADTj(k - 1 ) , T D T j ( k - 1))
+
T j , (1)Algorithm of in the Regulator
E T j ( k ) = max{ADTj(k - 1)
+
[Xjl - 1,[ T W . ( k ) -
Til
- 1, A.(k)) , (2)I D D j ( k ) = max{TDTj(k) - E T j ( k ) , 6j)
,
( 3 )withinitialvalues TDT’(1) = A j ( l ) , ET,(1) = A j ( l ) , and IDDj (1) = Sj, where Sj is the minimal initial due- date, given by Sj = min{Tj - [ X j l
+
l , rj}.Consider a specific connection, say VC-j. When the k-th cell arrives a t the regulator, T D T j ( k ) is not de-
termined until the feedback signal triggered by the de- parture of the ( k - l)-th cell is received. TDT?;(k) is then set to max{ADT, ( k - l), T D T j ( k - 1))
+
T j so that it meets the output sustainable cell rate constraint of VBR-j. In order t o guarantee that the output cell stream will conform to ( X j , T , q ) , the k-th cell cannot enter the scheduler earlier than either the time e- poch AD? ( k - l )
+
[ X j l - l or rTDT, ( k ) - .?] - l; otherwise, it might violate the peak cell rate constrain- t or the burst tolerance constraint, respectively. By taking account of the fact that a cell can never enter the scheduler before it arrives at the regulator, Eligible Time can be expressed as equation (2). Under ideal operation conditions, the maximal throughput of all connections should be maintained with the use of the traffic shaper. This requires that no cell losses occur in the scheduler and all cells are emitted before their The- oretical Departure Times. The first requirement can be easily met by allocating M buffers for cells at thescheduler, where M is the maximal number of connec-
tions that the shaper supports. To satisfy the second
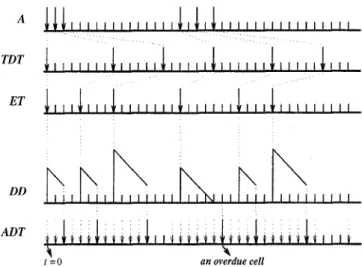
f = O an overdue cell
Figure 2: Sample-path of a specific VC with traf- fic descriptor ( X , T , 7 ) = (3,6,9). The dotted ar-
rows in ADT pattern represent the cell emis- sions of other VCs.
requirement, appropriate Initial Due-Dates must be as- signed. The difference between T D T ( k ) and E T , ( k )
is used as the preliminary initial due-date whenever the shaper is nonempty with respect t o VBR-j. From (1) and (2), it can be shown that TDT,(k) - E T , ( k )
is never smaller than 6, unless ET, ( I C ) = A,
(IC).
The final initial due-date, as given by equation (3), is set to be the maximum of the preliminary initial due-dateT D T , ( k )
-
ET, ( k ) and the minimal initial due-date 6,.The latter 6, is used to fairly resolve cell emission con- flicts, reduce scheduling delay bounds, and t o improve the shaper utilization under the CAC mechanism. We set 6, = min{T, -
[X,]
+
1, T,} so that overdue events for other VBR connections caused by immediate emis-sion of cells with E T , ( k ) = A 3 ( k ) can be minimized. From (1) to (3), it can be shown that IDD, ( k ) satisfies
T~
+
12
IDD,(k)2
SJ.
3.3.
Algorithm
in
the Scheduler
After the k-th cell of VC-j enters the buffer of the scheduler, its instantaneous due-date a t time t , denoted as D D j ( k , t ) , is defined t o be as follows.
DDj ( k , ET’ ( k ) ) = IDDj ( k ) (4) D D j ( k , t + 1) = m a x { D D j ( k , t ) - 1, O } . (5) f o r t
2
E T j ( k ) .In the scheduler, the Earliest-Due-Date (EDD) ser-
vice discipline is employed t o minimize the number of
overdue events. (Please refer to [7, 81 for similar de- signs and [9, 101 for detailed proof of its optimality.) Under the EDD discipline, the cell with the smallest
due-date in the scheduler is emitted first. If multiple cells have equal due-date, they are emitted in FIFO order. In this paper, we say that a cell is overdue if
its due-date is zero and still resides at the scheduler. Fig. 2 shows one sample-path of the control variables associated with a specific connection, say VC-j, with the output traffic descriptor (3,6,9).
4.
Performance Analysis
In this section, the delay performance and the call ad- mission control condition for both classes of VBR traf- fic are derived.
Theorem 1 : Consider a target c e l l f i o m VC-j, w i t h initial due-date y. T h e n t h e delay bound, d j ( y ) , of t h e tapget cell in the scheduler is g i v e n as follows.
f o r delay-sensitive VC, where 15 j
5
g, andG
min{ U
I
N j ( A ) + N ; ( y + A - 6 ; )B i = g+1 ,i# j
+ C N i ( U + A ) < a + A
]]
(7)i= 1 I
f o r delay-insensitive VC, where g
+
15
j5
G , and ~ ; ( t ) = min(L1+ +I,
11
+
*I>,
f o ~ t 2 0; Ni(t) = 0, otherwise.Proof: The scheduling delay bound for delay-sensitive
VC (1
5
j5
g) can be directly derived as in 151. In the following, we on,ly show the scheduling delay bound for delay-insensitive VC (g+ 1
5
j5
G). Consid- er the target cell from VC-j ( 9+ 1
5
j5
G) which enters the scheduler with initial due-date y at time tand departs the scheduler at time t
+
U . Assume the busy period that contains time t started at earlier time(t
-
A ) . Since delay-sensitive traffic has priority overdelay-insensitive traffic, those cells belonging to VC-i, where 1
5
i5
g , enter the scheduler during the inter-val [t - A, t
+
U ) can be emitted before the target cell. Hence, the number of delay-sensitive cells which can contribute t o the scheduling delay of the target cell is bounded byE:=,
N ~ ( u
+
A). Furthermore, since theEDD service discipline is employed in the scheduler, the !ast cell from V C - i (g
+
15
i5
G, and i#
j )that can delay the target cell must have arrived before time ( t
+
y - s), where s (s2
&) is the initial due- date of this cell. Hence, between time (t-
A) and time(t
+
y - s) the number of delay-insensitive cells thatdo not belong to VC-j and will be emitted before the target cell is bounded by
G G
Moreover, the number of cells which belong t o VC-j and enter the scheduler during
[t -
A, t ] is bounded by Nj ( A ) . Since the cells which enter the scheduler during[t
-
A, t+
U) and can be emitted before the target cellall contribute t o the busy period [t - A,t
+
U ] . T hedelay of the target cell should not be larger than the minimum U that satisfy
0 9
Nj(A)+ N i ( y + A - - i ) + C N i ( n + A ) 5 u + A .
i= g$ 1 , i # j i= 1
Therefore, we have the delay bound equation (7). 0
The following theorem provides the sufficient con- dition t o avoid cell overdue for both classes of VBR streams. One should note that if a cell is overdue, then its
ADT
is larger than itsTDT.
However,ADT
>
TDT
does not always imply a n overdue event.Theorem 2 :
If
d j ( S j )5
6j, t h e n n o cell of VC-j will be overdue.Proof : Consider an arbitrary cell from VC-j and let its initial due-date be y. If d j (y)
5
y, for all y2
6 j , this cell shall not experience overdue events. The condition for 15
j5
g is the same as Theorem 2 of [5], since the existence of low priority VBR cells do not affect the behavior of high priority VBR cells. To show the sufficient condition for g+
15
j5
G, by equation (7) one can express dj(y)-
y asI G
i = l )
c G
I G
min( U
-
6 j [ Nj(A)+
Ni(6j + A - 6;) i = g + l , i # jThus, dj(y)
5
y for ally2 S3
is implied by dj(S,)5
S j .2200
*** Delay-Sensitive
ooo Single Class
We then conclude d j ( 6 j )
5
Sj implies no cell overduefor VC-j. 0 -
be employed. When we guarantee the delay bound of
3
m ” -delay-sensitive VBR and impose call admission control
3
1600 the Policy 1. Meanwhile, when both delay-sensitiveE
14(X)-and delay-insensitive require delay bounds but of dif-
6
ferent values, the CAC mechanism must be applied to f 1 2 ~ -2000 +++ Delay-Insensitive
Two possible call admission control procedures can
to delay-sensitive traffic only, we call the CAC policy I
both classes and the corresponding policy is called the
Policy 2. The detailed CAC procedures are as follows.
70 80
Policy 1 :
Policy 2 :
When a new delay-sensitive VC, say VC- n, requests to be supported by the shaper, d j ( b j ) is computed for all existing delay- sensitive VCs and VC-n using (6). If all
d j ( 6 j )
5
6j are satisfied for delay-sensitiveVCs, the new request is granted. Other- wise, it is rejected. When a new delay- insensitive VC request arrives, it is always admitted unless the traffic is overloaded. When a new VC (delay-sensitive or delay- insensitive), say VC-n, requests to be sup- ported by the shaper, d j ( 6 j ) is computed
for all existing VCs and VC-n using (6) if the VC is delay-sensitive and (7) otherwise. If all d j ( 6 j )
5
6j are satisfied for all VCs,the new request is granted. Otherwise, it is rejected.
Although the traffic condition is different from that in [5]. We found the same total delay bound can be employed for both classes of VBR. The proof of the following theorem is thus omitted.
Theorem 3 : Assume the output and input traf-
fic descriptors of VC-j are given by
(Xj,Tj,~j)
and ( X i , T / , r / ) , where Tj5
q!.
If no overdue for VC-j is guaranteed, the cell delay o f VC-j within the wholeGCRA traffic shaper is bounded b y Dj which satisfies
If
T j =Tjl,
thenTotal number of VBR connections
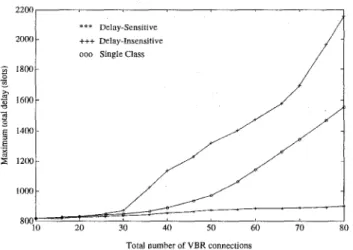
Figure 3: The maximum delay versus the num- ber of all VBR connections.
( X f , q ’ , ~ l )
=(3,86.2323,1600), ( X i , T i , r i ) = (20,86.2323,800), and
r = 0.99.
5.
Numerical Results
Here, we use several examples to illustrate the ad- vantages of the proposed GCRA traffic shaper when delay-sensitive and delay-insensitive VBR traffic are both supported. The ATM link d at a rate is set t o be 149.76 Mbps. During simulation, input cell streams to the regulator are generated by the following rule. The k-th cell arrival is first generated by a pseudo- arrival time T A T ( k )
-
a, where a: = 7’ (the input jitteror burst tolerance parameter) with probability r and z = 0 with probability 1
-
r . The recurrence equa-tion TAT(k) = TAT(k
-
l )+
T’ determines the k-ththeoretical arrival time for
k 2
1, while TAT(0) can be arbitrarily set. During simulation, the actual cell arrival time, A ( k ) , is determined byA ( k ) = max(rTAT(k) - a], A(k - 1)
+
[X’l}
.
Note that A ( k ) is always an integer. One can observe that the generated input arrival cell stream conforms t o the traffic descriptor ( X I , T’, 7’).In the following examples, multiple homogeneous
VBR connections are supported. The input traf-
fic descriptor of each VC is set to be
( X ~ , T / , T ~ )
=(3,86.2323,1600). Note that the sustainable cell rate of each VC is equivalent t o the da ta rate of a DS1. In the first example, the output traffic descriptor of each
VC is set to be ( X ; , T ~ , T ; ) = (20,86.2323,800). The number of delay-sensitive VCs equals that of delay- insensitive VCs, i.e., G = 29. Fig. 3 shows the curves
of the maximum delay versus the number of all con- nections. One can observe that the maximum delay
‘i D 20 30 40 SO 60 70 80
Tutal number of VBR connections
Figure 4: The maximum delay versus the num- ber of all VBR connections. ( X ~ , T / , T ~ ) =
and r = 0.99.
(3,86.2323,1600), ( X i , T i ,
TO
= (20,86.2323, 1600),of delay-sensitive VCs is reduced significantly under
our proposed shaper model (delay-sensitive VBR traf- fic has priority over delay-insensitive VBR traffic). The second example employed a different output traffic de- scriptor
(Xi,
Ti, q ) = (20,86.2323,1600). The maxi- mum delay versus the number of all VCs is illustrated in Fig. 4. Comparing Fig. 3 with Fig. 4, one can conclude that larger burst toerance leads to smaller shaping delay. This result indicates that the shaping delay of delay-sensitive VBR traffic can be reduced by assigning it higher priority. Last but not least, the traf- fic descriptor of a VBR stream also affects its shaping delay significantly. If the shaping delay is exceeding- ly long due to the difference between the input and output traffic descriptors of a delay-sensitive VBR, the priority mechanism does not help to reduce the shaping delay. Only by adjusting the output traffic descriptor or reducing the gap of input and output traffic descrip- tors can one reduce the shaping delay to an acceptable level.6 .
Conclusions
In this paper, a GCRA traffic shaper has been pre- sented and analyzed for supporting delay-sensitive and delay-insensitive ATM traffic. The two main design
features have been found to be effective. First, by as-
signing delay-sensitive VBR traffic higher priority than delay-insensitive VBR traffic in the scheduler, total de- lay of the former is significantly reduced. Secondly, by using a feedback signal between the regulator and the
scheduler, not only it can guarantee the output cel- l streams to conform to the output traffic descriptor, call admission control can be derived for QoS guaran- tee. Numerical examples have also validated the perfor- mance improvement than previous design. With such merit shown in this paper, we believe this shaper de- sign should be strongly desirable in support of future QoS-oriented high speed network evolution.
References
[l] F. Guillemin and W. Monin, “ Management of
Cell Delay Variation in ATM Networks, ” IEEE GLOBECOM’92, pp. 128-132.
[2] P. E. Boyer, F. M. Guillemin, M. J. Servel, and J. Coudreuse, “ Spacing Cells Protects and Enhances
Utilization of ATM Network Links, ” IEEE Net-
work, pp. 38-49. Sept. 1992.
[3] F. M. Brochin,
‘‘
A Cell Spacing Device for Con- gestion Control in ATM Networks,’’
PerformanceEvaluation, pp. 107-127, 1992.
[4] A. Elwalid and D. Mitra,
(‘
Traffic Shaping at aNetwork Node: Theory, Optimum Design, Admis- sion Control, ” IEEE INFOCOM’97, 1997.
[5] M . Li and Z. Tsai, “ Design and Analysis of the
GCRA Traffic Shaper for VBR Services in ATM Networks,
’’
IEEE ICC’97, pp. 210-214, 1997. [6] The ATM Forum, A T M User-Network InterfaceSpecification, Version 3.0, PTR Prentice-Hall,
1993.
[7] C. L. Liu and J. W. Layland, “ Scheduling Al-
gorithms for Multiprogramming in a Hard-Real- Time Environment. ” Journal of
A
CM,
Vol. 3, No.1, pp. 46-61, Jan. 1973.
[8] D. Ferrari and D. C. Verma,
‘‘
A Scheme for Real- Time Channel Establishment in Wide-Area Net- works, ” IEEE Journal o n Select. Areas in Com- man., Vol. 8, No. 3, pp. 368-379, April 1990. [9] H . Saito, “ Optimal Queuing Discipline for Real-Time Traffic at ATM Switching Nodes, ” IEEE ’Bans. Commun., Vol. 38, No. 12, pp. 2131-2136,
Dec. 1990.
[lo] L. Georgiadis, R. Guerin, and A. Parekh, “ Op-
timal Multiplexing on a Single Link: Delay and Buffer Requirements. ” IEEE INFOCOM’94, pp.