Static Analysis of Communication Structures in Parallel Programs
11
0
0
全文
(2) 1. Introduction Message passing is one of the most commonly used communication mechanisms in parallel programs. Using message passing, programmers explicitly specify the transfer of messages among parallel tasks. There are two types of message passing schemes: task-based and channel-based. In task-based message passing, a task sends (or receives) messages to (or from) another task by directly specifying its task identification. For example, send(task-id, message); message = receive(task-id); Parallel programming systems that use task-based message passing are CSP [4], Occam [5], Ada [6] and MPI [3]. In channel-based message passing, parallel tasks transfer messages among them by sending (or receiving) messages to (or from) a channel or message queue. For example, send(channel-id, message); message = receive(channel-id); A parallel programming system that uses channel-based message passing is Fortran M [2]. Channel-based message passing provides a simple and modular communication abstraction for parallel programs. Channels can be viewed as communication links connecting parallel tasks. Each task can communicate with other tasks (or its environment) via channels. Each task only concerns with communication events rather than specific communication participants. This separation of communication events and communication participants can greatly enhance the modularity of parallel programs. Task-based message passing only allows one-to-one communication pattern. Many-to-one communication pattern can be achieved by using the statement-level construct: guarded commands. It is possible to support all of the four communication patterns: one-to-one, many-to-one, one-to-many, and many-to-many in channel-based message passing. However, current channel-based programming systems only support one-to-one and many-to-one communication patterns. Parallel programming language CCC provides four types of channels: pipes for one-to-one communication, spliters for one-to-many communication, mergers for many-to-one communication, and multiplexers for many-to-many communication. The.
(3) abundance of channel types gives several merits. First, communication structures among parallel tasks are more comprehensive. Second, the specification of communication structures is easier. Third, the implementation of communication structures is more efficient. Fourth, the static analysis of communication structures is more effective. To allow dynamic communication structures, channels can be passed via other channels among parallel tasks in CCC programs. We will call a channel first-order if it is used to pass data. A channel is higher-order if it is used to pass channels. The inclusion of higher-order channels makes the static analysis of communication structures much more complicated. This paper will describe an algorithm for static analysis of communication structures in CCC programs. This algorithm can be also applied to other parallel programming systems using channel-based message passing. The remainder of this paper is organized as follows. Section 2 summarizes the terminologies used in this paper and defines the program representation used in our analysis. Section 3 describes the analysis for first-order channels. Section 4 describes the analysis for higher-order channels. Section 5 discusses the complexity of the analysis. Finally, conclusions are given in Section 6. 2. Overview of the Analysis The communication structure of a parallel program presents the interaction relationships among parallel tasks in the program. The abundance of channel types in CCC provides a better abstraction to closely related interactions. In particular, each channel is used to abstract a collection of closely related interactions. CCC provides four types of channels: pipe for one-to-one communication, spliter for one-to-many communication, merger for many-to-one communication, and multiplexer for many-to-many communication. Each channel is used to transfer data of a specific type and is created using the function channel. A simple CCC program for a single-producer and multiple-consumer application is shown in Figure 1..
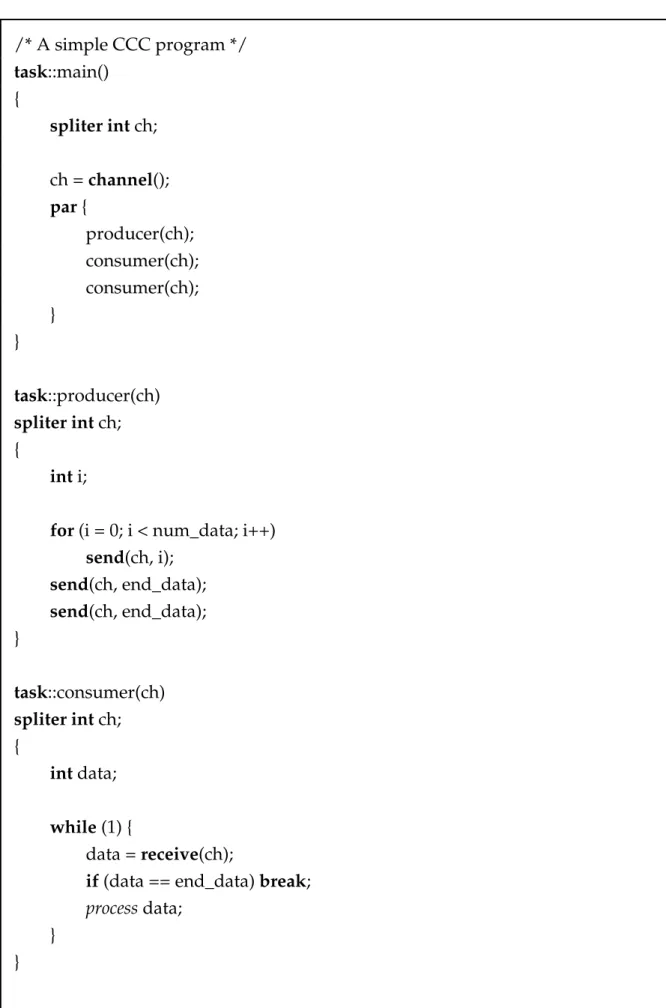
(4) /* A simple CCC program */ task::main() { spliter int ch; ch = channel(); par { producer(ch); consumer(ch); consumer(ch); } } task::producer(ch) spliter int ch; { int i; for (i = 0; i < num_data; i++) send(ch, i); send(ch, end_data); send(ch, end_data); } task::consumer(ch) spliter int ch; { int data; while (1) { data = receive(ch); if (data == end_data) break; process data; } } Figure 1. This simple CCC program illustrates a single-producer and multiple-consumer application..
(5) A CCC program consists of a set of functions. A function in CCC can be either a sequential or a parallel function. Each sequential function is a traditional C function and each parallel function represents a task that can be created and executed in parallel. Each task in CCC is specified by a keyword task. This example program has three task definitions. The main task is the first task of the program and it creates a producer task and two consumer tasks. Tasks are created in the par construct via invocations of parallel functions. A channel of type spliter is used to transfer data of type int from the producer task to the two consumer tasks. Data are sent using the function send and received using the function receive. The producer task sends an end_data to consumer tasks to signal the termination of data transfer. In addition to the interactions via the parameter passing between the main task (the caller) and the other tasks (the callees), this program contains interactions between the producer task and the two consumer tasks via the channel ch of type spliter. These interactions among tasks consist of the communication structure of this program. Even with only first-order channels, the communication structure of parallel programs is a dynamic property of the programs. Different runs may result in different communication structures. This paper will present an algorithm for static analysis of communication structures for CCC programs. This algorithm will focus on inferring the number of senders and receivers for each channel. This information can then be used to check whether each channel is used as it is specified. Since each channel is typed according it has one or many participants, the number of participants we are interested in are {0, 1, 2}, where 2 is used to represent many. The analysis for a function can be divided into two parts: intraprocedural analysis, the analysis for this function itself, and interprocedural analysis, the analysis for the functions called by this function. Since data transfers occurring within a function itself must appear in the same task, we only need to know whether a data transfer to (or from) each channel occurs. It is not necessary to know where or how many times data transfers to (or from) each channel occur. Hence, the information about whether a data transfer to (or from) each channel occurs within each function itself can be gathered by traversing the program structure once and for all. The interprocedural analysis is much more complicated than the intraprocedural analysis. A parallel function call can explicitly create a task. Although a sequential function call does not explicitly create a task, it may implicitly create tasks by indirectly calling other parallel functions. Hence, both sequential and parallel function calls may have deep effects, but they will be dealt with in different ways. Function calls occurring inside.
(6) different control structures may result in different effects. For example, function calls occurring inside the alternative control structure can only be executed mutually exclusively, while function calls occurring inside the repetition control structure may be executed multiple times. Thus, function calls occurring inside different control structures also need to be handled in different ways. The interprocedural analysis is performed on two program structures: a compact control flow graph for each function and a call graph among functions. There are five kinds of nodes in the compact control flow graphs. A call node represents a call to a sequential function. A spawn node represents a call to a parallel function. A compound node represents a sequence of nodes. An alternative node represents a list of nodes that are mutually exclusive. A repetition node represents a node that may be executed multiple times. The three kinds of control nodes: compound, alternative, and repetition nodes are used to characterize the control structures of (sequential or parallel) function calls within a function. The call graph presents the caller-callee relationships among functions. Each node in the call graph represents a function (either a sequential or a parallel function). There is an edge from node n to node m if function n calls function m in the program. If there is no mutual recursion in the program, the call graph is a directed acyclic graph. In this case, the interprocedural analysis can be performed on each function using the topological order of the call graph. Otherwise, The strongly connected components of the call graph are found and a strongly connected component graph, which is a directed acyclic graph, is constructed. Each node of the strongly connected component graph represents a strongly connected component. There is an edge from node n to node m if there is a function in n calls a function in m. The nodes in a strongly connected component represent functions that are mutually recursive. These mutually recursive functions need to be analyzed at the same time. Strongly connected components are analyzed using the topological order of the strongly connected component graph. We will describe the analyses for the first-order channels and the higher-order channels in the next two sections, respectively. 3. The analysis for first-order channels This section presents the analysis for programs that only use first-order channels. For each channel ch declared within a function, the analysis will infer the number of tasks that send data to ch, ch.senders, and the number of tasks that receive data from ch, ch.receivers. Since each function may create tasks by calling parallel functions, for each channel ch, we can divide ch.senders and ch.receivers as follows..
(7) ch.senders = ch.self.senders + ch.others.senders ch.receivers = ch.self.receivers + ch.others.receivers where, ch.self.senders and ch.self.receivers denote the task executing the function and can have values {0, 1}, and ch.others.senders and ch.others.receivers denote the tasks created by the function and can have vales {0, 1, 2}. We will call the four-tuple {ch.self.senders, ch.self.receivers, ch.others.senders, ch.others.receivers} the mode of ch. A channel variable can only be assigned a channel value by creating a channel using the function channel or by receiving a channel from a higher-order channel. Without higher-order channels, channels can be passed to other functions only via parameter passing. Hence, the aliasing of channels can only occur through parameter passing. The analysis will first perform a simple context-insensitive aliasing analysis to compute the channel aliases induced solely by parameter passing [1]. We consider each strongly connected component in order. For each channel ch, the dataflow equations for the mode of ch at each node of the compact control flow graph can be derived as follows. For each compound node n, let L be the sequence of nodes inside n. Initially, chn.self.senders = the values obtained from the intraprocedural analysis, chn.self.receivers = the values obtained from the intraprocedural analysis, chn.others.senders = 0, chn.others.receivers = 0, if n is the initial node of the compact control flow graph; otherwise, chn.self.senders = 0, chn.self.receivers = 0, chn.others.senders = 0, chn.others.receivers = 0. Then, chn.self.senders = chn.self.senders || Ωx ∈ L chx.self.senders,.
(8) chn.self.receivers = chn.self.receivers || Ωx ∈ L chx.self.receivers, chn.others.senders = min(2, chn.others.senders + Σx ∈ L chx.others.senders), chn.others.receivers = min(2, chn.other.receivers + Σx ∈ L chx.others.receivers), where Ω denotes logical or and Σ denotes summation. For each call node n, let A be the set of channels that are aliased with a channel argument ch at n. Then, chn.self.senders = Ωx ∈ A x.self.senders, chn.self.receivers = Ωx ∈ A x.self.receivers, chn.others.senders = min(2, Σx ∈ A x.others.senders), chn.others.receivers = min(2, Σx ∈ A x.others.receivers). For each spawn node n, let A be the set of channels that are aliased with a channel argument ch at n. Then, chn.self.senders = 0, chn.self.receivers = 0, chn.others.senders = min(2, Ωx ∈ A x.self.senders + Σx ∈ A x.others.senders), chn.others.receivers = min(2, Ωx ∈ A x.self.receivers + Σx ∈ A x.others.receivers). For each alternative node n, let L be the list of nodes inside n. Then, chn.self.senders = maxx ∈ L chx.self.senders, chn.self.receivers = maxx ∈ L chx.self.receivers, chn.others.senders = min(2, maxx ∈ L chx.others.senders), chn.others.receivers = min(2, maxx ∈ L chx.others.receivers). For each repetition node n, let m be the node inside n. Then, chn.self.senders = chm.self.senders, chn.self.receivers = chm.self.receivers, chn.others.senders = if (chm.others.senders == 0) then 0 else 2, chn.others.receivers = if (chm.others.receivers == 0) then 0 else 2. For each function in a strongly connected component, the mode for each channel is computed as specified above. This computation will continue until a fixed point is reached..
(9) Strongly connected components are analyzed following the topological order of the strongly connected component graph. 4. The analysis for higher-order channels This section presents the analysis for programs that also use higher-order channels. In such programs, a channel variable can be assigned a channel value by either creating a channel using the function channel or receiving a channel from a higher-order channel. With higher-order channels, the aliasing of channels can thus occur through either parameter passing or message passing. For simplicity, we will consider only second-order channels, which are used to transfer first-order channels. The approach can be extended to higher-order channels. For each second-order channel ch, in addition to the mode of ch, the analysis will also infer the set of channels sent to ch, ch.sendSet, and the set of channels received from ch, ch.receiveSet, to handle the aliasing occurring through message passing. In intraprocedural analysis, for each function f, if there is a channel x sent to second-order channel ch, then (f, x) is added into ch.sendSet, and if there is a channel x received from ch, then (f, x) is added into ch.receiveSet. In interprocedural analysis, for each second-order channel ch, the dataflow equations for ch.sendSet and ch.receiveSet of ch at each node of the compact control flow graph can be derived as follows. For each compound node n, let L be the sequence of nodes inside n. Initially, chn.sendSet = the values obtained from the intraprocedural analysis, chn.receiveSet = the values obtained from the intraprocedural analysis, if n is the initial node of the compact control flow graph; otherwise, chn.sendSet = ∅, chn.receiveSet = ∅. Then, chn.sendSet = chn.sendSet ∪ ∪x ∈ L chx.sendSet,. chn.receiveSet = chn.receiveSet ∪ ∪x ∈ L chx.receiveSet..
(10) For each call node or spawn node n, let A be the set of channels that are aliased with a channel argument ch at n. Also, let C be the set of channel parameters at n, and for each p ∈ C, let µ(p) represent the corresponding channel argument of p at n. Then, chn.sendSet = ∪x ∈ A x.sendSet{∀p∈C ,p/µ µ(p)},. µ(p)}. chn.receiveSet = ∪x ∈ A x.receiveSet{∀p∈C ,p/µ Where S{∀p∈C ,p/q} denotes a set obtained from the set S by substituting p by q for each p∈C occurring in the elements of S. For each alternative node n, let L be the list of nodes inside n. Then, chn.sendSet = ∪x ∈ L chx.sendSet, chn.receiveSet = ∪x ∈ L chx.receiveSet. For each repetition node n, let m be the node inside n. Then, chn.sendSet = chm.sendSet, chn.receiveSet = chm.receiveSet. For each function in a strongly connected component, ch.sendSet and ch.receiveSet for each second-order channel ch is computed as specified above. This computation will continue until a fixed point is reached. Strongly connected components are analyzed following the topological order of the strongly connected component graph. Given ch.sendSet and ch.receiveSet for each second-order channel ch, we can then take into account the aliasing caused by message passing. For each x in ch.sendSet, x may be aliased with each y in ch.receiveSet because of message passing. Let α(x) be the set of z in ch.sendSet that are aliased with x. Then, for each c in α(x) or ch.receiveSet, c.self.senders = Ωd ∈ α(x) ∪ ch.receiveSet d.self.senders, c.self.receivers = Ωd ∈ α(x) ∪ ch.receiveSet d.self.receivers, c.others.senders = min(2, Σd ∈ α(x) ∪ ch.receiveSet d.others.senders), c.others.receivers = min(2, Σd ∈ α(x) ∪ ch.receiveSet d.others.receivers). The aliasing becomes more complicated if a channel may be transferred among functions via more than one second-order channel. For example, a channel c may be sent.
(11) from function f via a second-order channel ch1 to function g, then c is passed from function g via another second-order channel ch2 to function h. In this case, the channels in ch1.sendSet may be aliased with the channels in ch2. receiveSet due to the transitivity of the aliasing. Hence, if some channel in ch1.receiveSet is aliased with some channel in ch2.sendSet, each channel ch1.sendSet in is aliased with every channel in ch1.receiveSet ∪ ch2. receiveSet. 5. Conclusions This paper has described an algorithm for static analysis of communication structures in CCC programs. For each channel ch declared within the program, this algorithm infers the number of tasks that send data to ch, and the number of tasks that receive data from ch. This information can then be used to check whether each channel is used as it is specified. This algorithm uses a simple approach to exploiting both the aliasing caused by parameter passing and by message passing. References [1] A. V. Aho, R. Sethi, J. D. Ullman. Compilers: Principles, Techniques, and Tools. Addison-Wesley, 1986. [2] Foster and K. M. Chandy. Fortran M: A Language for Modular Parallel Programming. Journal of Parallel and Distributed Computing, 25 (1), 1995. [3] W. Gropp, E. Lusk, and A. Skjellum. Using MPI: Portable Parallel Programming with the Message Passing Interface. MIT Press, 1995. [4] C. A. R. Hoare. Communicating Sequential Processes. Prentice Hall, 1984. [5] D. May. OCCAM. ACM SIGPLAN Notices, 25 (4), 1983, pp. 69-79. [6] Y. Wallach. Parallel Processing and Ada. Prentice Hall, 1991..
(12)
數據
相關文件
• As the binary quadratic programming program is NP-hard in general, identifying polynomially solvable subclasses of binary quadratic programming problems not only offers the-
In particular, we present a linear-time algorithm for the k-tuple total domination problem for graphs in which each block is a clique, a cycle or a complete bipartite graph,
Among Lewis structures having similar distributions of formal charges, the most plausible structure is the one in which negative formal charges are placed on the more
Students are asked to collect information (including materials from books, pamphlet from Environmental Protection Department...etc.) of the possible effects of pollution on our
For example, Ko, Chen and Yang [22] proposed two kinds of neural networks with different SOCCP functions for solving the second-order cone program; Sun, Chen and Ko [29] gave two
We explicitly saw the dimensional reason for the occurrence of the magnetic catalysis on the basis of the scaling argument. However, the precise form of gap depends
From all the above, φ is zero only on the nonnegative sides of the a, b-axes. Hence, φ is an NCP function.. Graph of g functions given in Example 3.9.. Graphs of generated NCP
Miroslav Fiedler, Praha, Algebraic connectivity of graphs, Czechoslovak Mathematical Journal 23 (98) 1973,
