A multi-objective approach in the optimization of optical systems
taking into account tolerancing.
Bráulio F.C. de Albuquerque
a,b, Lin-Yao Liao
cb, Amauri Silva Montes
a, Fabiano Luis de Sousa
a, José
Sasian
ba
INPE - Instituto Nacional de Pesquisas Espaciais, São José dos Campos, Brazil;
bCollege of Optical Sciences, The University of Arizona, Tucson-AZ, USA.
c
Department of Photonics & Institute of Electro-Optical Engineering,
National Chiao Tung University, Hsinchu 30010, Taiwan.
ABSTRACT
A Multi-Objective approach for lens design optimization was verified. The optimization problem was approached by addressing simultaneously, but separately, image quality and system tolerancing. In contrast to other previous published methods, the error functions were not combined into a single merit function. As a result the method returns a set of non-dominated solutions that generates a Pareto Front. Our method resulted in alternate and useful insights about the trade off solutions for a lens design problem. This Multi-objective optimization can conveniently be implemented with evolutionary methods of optimization that have established success in lens design. We provided an example of the insights and usefulness of our approach in the design of a Telephoto lens system using NSGA-II, a popular multi-objective evolutionary optimization algorithm.
Keywords: Lens Design, Optimization, Evolutionary Optimization, Multi-Objective Optimization, Tolerance.
1. INTRODUCTION
Tolerancing is a crucial issue in optical design field due to high sensitivity of imaging optical systems with respect to fabrication errors. Search for insensitive optical systems that complies with the image quality requirements when built is always the goal of an optical designer. An insensitive system is desirable because the production costs are reduced without compromising the image quality significantly.
Classical approaches for the design of an insensitive optical system are based in an interactive method divided in two parts. The first is the design itself using first order analysis and optimization tools. As the second task, a tolerance analysis is carried out in order to get the systems error budget and the expected as-built performance. Usually, and especially for high performance optical systems, designers realize that some modifications in the system draw are needed to improve the as-built system performance for the available tolerances. In this way, an interactive process of design and tolerance analyses is done, in order to get an acceptable trade-off solution between the as-designed and the as-built result. Some authors suggested the inclusion of metrics that estimate the system sensitivity into the merit function (MF) as a penalty [1,2]. The problem in this approach is to balance the weight between the image quality and sensitivity metrics in a single MF, due to the fact that they do not have the same physical meaning and units.
Other works have used a multi-configuration approach to design insensitive system [3]. In this method each configuration represents a deviation of the original system. The final MF is formed by the average of the merit function of each configuration. In this way, the tolerancing can be considered during optimization process. This seems a very interesting and practical solution. However, the methodology crash down fast with the number of elements in the system due to the number of configurations needed to account for the different fabrication errors for each surface.
Some approaches have taken advantage of global optimization algorithms to find many local minimums [4,5] and after that, the systems are ranked according to the sensitivity, accessed either using a simple metric or by means of a complete tolerance analysis. The drawback in these methodologies is that the optimization algorithm is not driven by the sensitivity, but only by the image quality metric.
Epple and Wang, 2008 [6], suggested the inclusion of aspherical surfaces to reduce sensitivities in optical design. However, aspherical surfaces might also have its own tolerance problems, what can end up being conflicting with the idea of desensitizing.
Optical System Alignment, Tolerancing, and Verification V, edited by José Sasián, Richard N. Youngworth, Proc. of SPIE Vol. 8131, 813105 · © 2011 SPIE
CCC code: 0277-786X/11/$18 · doi: 10.1117/12.894980 Proc. of SPIE Vol. 8131 813105-1
In this paper, we explored a multi-objective approach for the lens design optimization problem. In this way of handling the problem, image quality and system sensitivity were taken into consideration simultaneously, driving the search. Nevertheless, different from previous published methods in lens design, both criteria are not fused in a single merit function. As a result, non-dominated solutions could be obtained to generate the corresponding Pareto Front. This method gave better insights about the available trade off solutions for the problem.
Multi-objective optimizations can be easily implemented with evolutionary methods of optimization, which have been applied in the problem of lens design with successful reported results [7-19]. In this work we are going to use a variant of the Non-dominated Sorting Genetic Algorithm-II (NSGA-II) [20] to show a simple example of the application for the suggested approach in the design of a telephoto camera lens.
In next section we briefly explain the multi-objective approach. In section 3 we present the two metrics or merit functions used with the present idea. The numerical implementation is explained in section 4. An example that applies the present concept to the design of a telephoto lens, as well as the obtained results, are shown in section 5. Section 6 shows the conclusion of this work.
2. THE MULTI-OBJECTIVE APPROACH
Engineering optimization problems are normally of multi-objective nature. Many times these objectives or criteria are conflicting. In the design of a car engine for example, the main goal is maximize performance and minimize fuel consumption simultaneously.
The most used methods to deal with these kinds of problem are based on scalarization approaches, which transform a multi-objective problem into a mono-objective one. Among these scalarization methods we can mention the Weighted Sum Approach, the ε-Constraint Method, Goal Attainment, Lexicographic Ordering, Reference Point Approach and Goal Programming [21].
Scalarized methods are attractive approaches to deal with multi-objective problems due to the possibility of using one of the many available mono-objective optimization methods and tools. This is perhaps the reason why multi-objective approaches have not been extensively explored in optical design.
Joseph et al [10] used a multi-objective method to optimize optical systems using three criteria, spherical aberration, distortion, and transverse ray aberration function. Ono et al [15] also applied a multi-objective optimization in lens design using the image resolution and the distortion as attributes. Gagné et al [19] employed a multi-objective optimization in lens design taking into account the glass material cost and image quality. Despite of using a multi-objective optimization approaches, these works do not apply this technique to design optical systems considering the sensitivity to fabrication errors.
To understand this approach, two definitions are important. One is the dominance concept, and the other is the Pareto Front.
Lets suppose we have a generic multi-objective problem where we want to minimize “n” functions, (F1,F2,…Fn). We say
that a feasible solution “X” is non-dominated if and only if there is no other solution “K” in the feasible design space such that for all i=1,2,…,n, Fi(K) ≤ Fi(X). If at least one solution “K” exists, then “X” is called dominated solution. The
set of non-dominated solutions is called Pareto Front.
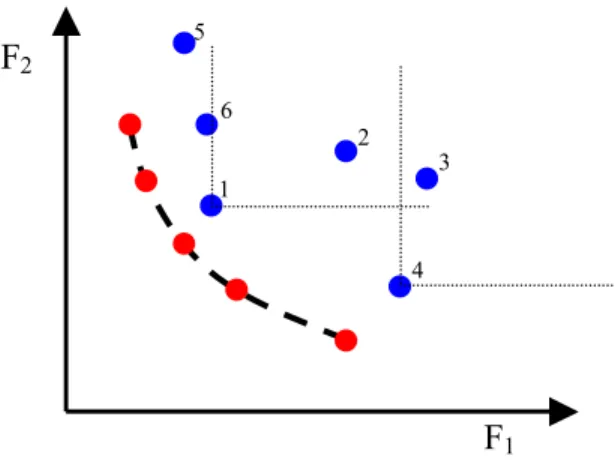
These concepts are illustrated in figure 1. This figure shows some possible solutions for a multi-objective min-min problem of two functions (F1 and F2) plotted in the functions space.
Proc. of SPIE Vol. 8131 813105-2
F
1F
2 3 2 1 4 5 6Fig. 1-The graph shows solutions for a generic min-min multi-objective problem, plotted in the functions space.
Blue points in fig.1 represent the dominated solutions. Red points denote the non-dominated ones. The set of red points form the Pareto Front, represented by the dash lines in the graph.
The goal in a multi-objective problem is to find the Non-dominated solutions that form the Pareto Front. In this way, after running the multi-objective optimization a set of compromise solutions is obtained, and not just a single solution as acquired in a mono-objective approach. This gives designers a very clear idea of the compromises that can be made in the design considering the used metrics.
Evolutionary Optimization (EO) Algorithms are very powerful tools to directly solve multi-objective optimization problems. Multi-Objective Genetic Algorithm -MOGA [22], Non-dominated Sorting Genetic Algorithm-NSGA [23] and NSGAII [20], Niched Pareto Genetic Algorithm-NPGA [24], Strength Pareto Evolutionary Algorithm-SPEA [25] and SPEA-II [26], and Pareto Archived Evolution Strategy –PAES [27], can be quoted as the most outstanding multi-objective evolutionary algorithm. In this work we make use of a NSGA-II variant implemented in a built-in function in MATLAB.
3. THE MERIT FUNCTIONS
Two merit functions were used in order to verify the method presented herein. One merit function is related to image resolution (image quality), and the other one to system sensitivity, or tolerance. Next, each one of these merit functions is presented.
3.1 The image resolution merit function
One of the main issues in applying EO methods in lens design is related to feasibility of the systems. Many systems generated during the search are unfeasible, especially during random generation of the first population and by diversity operands (e.g. crossover, mutation, etc) during early stage of the optimization. This problem gets worse in large-scale problems (systems with many lens). This is a consequence of high complex constrains involved in the problem of optical design. This issue makes standards image quality metrics, such as spot size and optical path difference, impossible to calculate due to the failure of real ray trace through the system.
Feasibility problem has been reported in different papers, in which methods to get round it also had been proposed. Ono
et al [15], proposed a method that systematic changes systems variables until all the necessary real rays can be traced
through the system, allowing calculation of spot size. Basically in order to do that, some marginal rays are traced from different field of view (FOV) positions. Surfaces where the ray trace fail are identified and parameter from these surfaces are changed until one feasible system is achieved. Other references, as Chen and Yamamoto [8] and Gagné et al [19], use a two-layer MF. One MF is used when rays cannot be traced through the system and other one when the system is feasible.
In EO methods the number of times a MF is calculated until a useful result is achieved lay in the order of 105 to 107 and sometimes even higher depending on the problem. Due to this, the time spent to calculate the MF is a very important factor for the problem feasibility and for the EO algorithm performance.
Proc. of SPIE Vol. 8131 813105-3
In this work we introduced a MF for image quality that can always be computed, gives a reasonable accuracy of image quality and only needs to trace two paraxial rays for each wavelength to be computed, what makes it computationally very efficient. The MF proposed is the square root of the sum of the RMS wave front error for the whole FOV for each wavelength “λ”, as shown in Eq.1.
F1= RMSWFE2(λ)
λ=1
w
∑
(1)RMS wave front error for the whole field (RMSWFE) is calculated for each wavelength using Eq. 2:
RMAWFE(λ)2= σ(H,λ) 2dH 0 1
∫
H dH 0 1∫
(2)H is the normalized image height, and σ(H,λ)2 is given by Eq. 3, witch is the RMS wave front error for a specific image
position H. σ(H,λ)2= 1 π 0W (H,ρ,ϕ,λ) 1
∫
0 2π∫
2 ρdρdϕ− 1 π2 0W (H,ρ,ϕ,λ)ρdρdϕ 1∫
0 2π∫
⎡ ⎣⎢ ⎤⎦⎥ 2 (3)W is the wave front error polynomial. We use for this equation the 5th order approximation, that is given by Eq. 4:
W (H,ρ,ϕ, λ) = W111(λ)Hρcos(ϕ)+ W020(λ) ρ2+ W040(λ) ρ4 + W131(λ)Hρ3cos(ϕ)+ W222H2ρ2cos2(ϕ) + W220(λ)H2ρ2 + W311(λ)H3ρcos(ϕ)+ W240(λ)H2ρ4+ W331(λ)H3ρ3cos(ϕ) + W422(λ)H4ρ2cos2(ϕ)+ W420(λ)H4ρ2+ W511(λ)H5ρcos(ϕ) + W060(λ)ρ6 + W151(λ)Hρ5cos(ϕ)+ W242(λ)H2ρ4cos2(ϕ) + W333(λ)H3ρ3cos3(ϕ) (4)
W020 and W111 are zero for the principal wavelength “λ0”. For other wavelengths “λ” they are respectively given by Eq.
5 and 6. These coefficients represent the axial and the lateral color wave coefficients respectively [28].
W 020= − nδS
2R2 (5)
W111= nδh
R (6)
Where “n” is the index of refraction in image space, “R” is the exit pupil semi-diameter, “δS” represents the difference in distance from the exit pupil position to the paraxial image plane for the wavelength “λ0” and “λ”, and “δh” the difference in image height between paraxial marginal rays coming from the edge of the FOV for “λ0” and “λ”.
Third order coefficients in Eq. 4 are the Seidel terms and their calculations are very well known. Fifth order terms in Eq. 4, can be computed through the equations given by Sasian in ref. [29]. From the equations shown above, and from the last reference, we can easily deduct that the calculation of this MF only involves the trace of two paraxial rays through the system for each wavelength defined.
Proc. of SPIE Vol. 8131 813105-4
3.2 The sensitivity merit function.
For the sensitivity merit function, the same principles we used for image quality were followed. Therefore, this MF must be fast to calculate, give a good metric for tolerance and must be computed in any situation.
In the literature it was possible to find some metrics that would work for our application. For example, the power distribution metric proposed by Sasian and Descour [30], the two sensitivities metrics proposed by Wang and Sasian [31], and the one proposed by Isshiki et al [5]. All these metrics are or can be calculated with paraxial rays. In this work we chose the metric presented in the last reference although, instead of using real ray tracing we used paraxial ray tracing to compute it.
Eq. 7 shown below, computes the metric for the chosen sensitivity MF chosen:
F
2=
(i
s2+ r
s 2)
s=1 k∑
2k
(7)where is and rs represent respectively incident and refracted angles of a chosen ray in surface s. k is the number of
surfaces in the system. In our work we chose the paraxial marginal ray coming from the extreme FOV position.
4. NUMERICAL IMPLEMENTATION
In order to conduct the research presented in this paper and other investigations related to optimization in optical design, an optical design toolbox for MATLAB had been implemented. This toolbox can trace rays through any rotational symmetric optical systems with spherical surfaces. It is a tool intended to research proposes only, and not to compete with commercial optical design packages.
The toolbox is composed by many functions and subroutines capable of performing real and paraxial ray trace and calculating basic parameters of a system, such as: the focal length, exit and entrance pupil positions and size, RMS and geometrical spot size, RMS and P-V optical path difference, third and fifth wave aberration coefficients, etc. The Merit Functions proposed in this work were implemented in this toolbox too. Other auxiliary functions used during the optimization process as: lens edge thickness, lens edge separation, system total length, and others, were implemented as well, and are used to control the constrains in the systems.
The multi-objective optimization method we implemented is based in multiple calls of an evolutionary multi-objective optimization algorithm function from the MATLAB Optimization toolbox. This function is a variation of the NSGA-II algorithm [32]. The implemented method works according to the follow steps:
1) An initial population is generated randomly. Each individual is formed by a bit string, which represents each one of the variables of the optical system. Both MFs are calculated for each randomly generated individual. 2) The Multi-objective function from the MATLAB Optimization toolbox is called (gamultiobj). This function
runs for a pre-defined number of generations, trying to find variable combinations that minimize at the same time both merit functions defined for the problem. This function returns non-dominated solutions found during the search in the present interaction.
3) Non-dominated solutions found in the present interaction are combined with non-dominated solutions found in the previous interaction. A Pareto filter is then applied in this combined solution set. As a result, we have non-dominated solutions found for all the previous interactions.
4) The algorithm returns to step 1 and repeat steps form 1 to 4 for a predefined number of interactions.
The algorithm gives as output a set of non-dominated solutions that were originated from independent and successive runs of an evolutionary multi-objective optimization function.
5. THE EXAMPLE
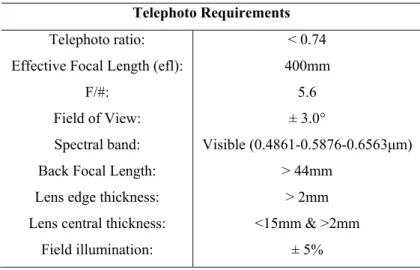
In order to test the approach and the proposed method, some basic requirements were addressed for an optical system used as example. The system specified was a telephoto lens for which the requirements are summarized in the Table 1.
Proc. of SPIE Vol. 8131 813105-5
In this specific experiment, the variables were: the radius of curvature, the air and glass thicknesses of all surfaces, except for the last one. Solvers for the last surface curvature and air thickness were applied. The first solver preserved fixed the efl, while the second solver kept the image plane in its paraxial position. The number of surfaces and the glass types were set as fixed.
Table 1.Requirements for the Telephoto Lens used as an example.
Telephoto Requirements
Telephoto ratio: < 0.74 Effective Focal Length (efl): 400mm
F/#: 5.6
Field of View: ± 3.0°
Spectral band: Visible (0.4861-0.5876-0.6563μm) Back Focal Length: > 44mm
Lens edge thickness: > 2mm Lens central thickness: <15mm & >2mm
Field illumination: ± 5%
Some constrains in this example were controlled by the codification function that transforms the binary code into the variables real numbers as for example, the max and min air and glass thickness. Other constraints were controlled by a static exterior penalty applied at the same time in both merit functions.
Twelve surfaces (or six singlet lens) were used in this example. The stop was placed in the first surface of the system. Two kinds of glasses were used in the system, one crown (Schott PSK54) and one flint (Schott KZFSN5), for which the position were intercalate along the system.
We ran the proposed algorithm for 75 interactions. The number of generations in each interaction was 250, as well as the number of individuals in the population.
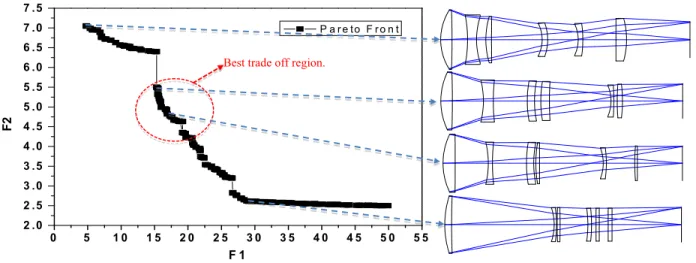
The non-dominated solutions found for the problem can be seen in Fig. 2, where they are plotted in the merit function space. In the same figure, we show the layout of four systems, the one with the smallest F1, two in the region we believe to be the best trade of one, and other in the region for a low F2.
As expected, the algorithm returned many different trade-off solutions, different from a single solution normally returned by other optimization tools. This provides designers a better insight of possible compromises in terms of image quality and fabrication tolerances for the optical system under design.
As shown in the figure 2, the systems in the different regions of the non-dominated solutions of the graph have different architectures. For example, we can see clearly that the first system, from the top to the bottom, has as a first group an air spaced triplet, the second has 3 groups, all formed by a air spaced doublet. This gives some insights of the capability of the algorithm in finding solutions in the different regions of the design space.
Proc. of SPIE Vol. 8131 813105-6
Fig. 2-The graph shows solutions for a generic min-min multi-objective problem, plotted in the functions space.
The systems found as results are far from been very well corrected design in terms of image quality, but represents start points for a further local search algorithm. We believe that the first three systems shown in figure 2 are promising designs. They differ dramatically from the last one, that we believe to be no longer promising due to its high value of F1 and strange architecture.
The performance of the evolutionary algorithm used in this example can be changed of achieving better results with the customization of the optimization core algorithm for the specific problem of lens design. As we mentioned before, the algorithm we used is a general proposed one and not dedicated for lens design problems.
6. CONCLUSION
In the present paper we presented and tested the use of a multi-objective optimization algorithm for the design of optical system taking to account the image quality and its sensitivity. Although this idea has been mentioned in other papers, we are not aware of a work that effectively explored, implemented tested and showed the results for this approach.
The image quality Merit Function used is also other contribution of this work. This MF was dedicated developed for evolutionary optimization algorithm, giving a good approximation of the image quality, fast to compute, and does not crash when real rays cannot be traced through the system.
We applied the proposed method for a simple example, showing that the algorithm works and can be a very good tool for the design of insensitive systems, giving the designer many trade off options, with systems presenting different architecture.
The optimization algorithm used here is for a general purpose, not tailored for the problem of lens design. This gives a huge perspective for the improvement that can be achieved if a customized multi-objective optimization algorithm is used with the presented idea.
ACKNOWLEDGMENTS
B. F. C. Alburquerque gratefully acknowledges the Kidger Optics Associates for supporting these studies through the 2010 Michael Kidger Memorial Scholarship in Optical Design.
0 5 1 0 1 5 2 0 2 5 3 0 3 5 4 0 4 5 5 0 5 5 2 .0 2 .5 3 .0 3 .5 4 .0 4 .5 5 .0 5 .5 6 .0 6 .5 7 .0 7 .5 F2 F 1 P a r e to F r o n t
Best trade off region.
Proc. of SPIE Vol. 8131 813105-7
REFERENCES
[1] M. Ishiki, L. Gardner, G.G. Gregory, “Automated control of manufacturing sensitivity during optimization,” in
Optical Design and Engineering, L. Mazuray, P. J. Rogers, R. Wartmann, Ed,. Proc. SPIE 5249, 343-352 (2004);
doi:10.1117/12.514448.
[2] M. Jeffs, “Reduced Manufacturing Sensitivity in Multi-Element Lens Systems” in International Optical Design
Conference, OSA Technical Digest Series, IMC4 (2002);
http://www.opticsinfobase.org/abstract.cfm?URI=IODC-2002-IMC4
[3] K. Fuse, JP. Osaka, “Method for designing a refractive or reflective optical system and method for designing a diffraction optical element”, US patent 6567226 (2003).
[4] J. P. McGuire, Jr, “Designing Easily Manufactured Lenses Using a Global Method,” in International Optical Design
Conference, Optical Society of America IODC Technical Digest (CD) TuA6 (2006);
http://www.opticsinfobase.org/abstract.cfm?URI=IODC-2006-TuA6
[5] M. Isshiki, D. Sinclair, and S. Kaneko, “Lens Design: Global Optimization of Both Performance and Tolerance Sensitivity,” in International Optical Design Conference, Optical Society of America IODC Technical Digest (CD) TuA5 (2006); http://www.opticsinfobase.org/abstract.cfm?URI=IODC-2006-TuA5
[6] A. Epple and H. Wang, “Design to Manufacture: from the Perspective of Optical Design and Fabrication,” in
Optical Fabrication and Testing, Optical Society of America Technical Digest (CD) OFB1 (2008);
http://www.opticsinfobase.org/abstract.cfm?URI=OFT-2008-OFB1
[7] J. Beaulieu, C. Cagné, M. Parizeau, “Lens System Design and Re-Engineering with Evolutionary Algorithms,” in
Genetic And Evolutionary Computation Conference, Proc. GECCO, 155-162 (2002); doi: 10.1.1.116.7014.
[8] X. Chen, K. Yamamoto, “Genetic algorithm and its application in lens design”. in Current Developments in Optical
Design and Engineering, R. E. Fischer, W. J. Smith, Eds., pp-216-221, Proc. SPIE 2863,WA (1996) .
[9] L. W. Jones, S.H. Al-Sakran, J.R. Kosa, “Automated Synthesis of a Human-Competitive Solution to the Challenge Problem of the 2002 International Optical Design Conference by Means of Genetic Programming and a Multi-Dimensional Mutation Operation,” in Genetic And Evolutionary Computation Conference, Proc. GECCO, 823-830, (2006); doi: 10.1.1.152.8941.
[10] S. Joseph, W.H. Kang, U.K. Chakraborty, “Optical Design with Epsilon-Dominated Multi-objective Evolutionary Algorithm”. Lecture Notes In Computer Science, 4431, 77-84 (2007)
[11] J.R. Koza, S. H. Al-Sakran, L.W. Jones, “Automated re-invention of six patented optical lens systems using genetic programming,” in Genetic and Evolutionary Computation Conference, Proc. GECCO, 1953-1960 (2005)
[12] D.C. Leijenhorst, C. B. Lucasius, J.M. Thijssen, “Optical design with the aid of genetic algorithm”. Biosystems, 37, 177-187 (1996). [doi:10.1016/0303-2647(95)01556-6].
[13] K. E. Moore, “Algorithm for global optimization of optical systems based on genetic competition,” in Optical
Design and Analysis Software, R. C. Juergens, Ed., Proc. SPIE 3780, 40-47 (1999)
[14] Y. Nagata, “The Lens Design Using the CMA-ES Algorithm,” in Genetic and Evolutionary Computation
Conference, Proc. GECCO, 1189-1200 (2004)
[15] I. Ono, S. Kobayashi, K. Yoshida, “Global and Multi-objective Optimization for Lens Design by Real-coded Genetic Algorithms,” in International Optical Design Conference, L. R. Gardner, K.P. Thompson, Eds., Proc. SPIE
3482,. 110-121 (1998)
[16] J. Sakuma, S. Kobayashi, “Latent Variable Crossover for k-tablet Structures and its Application to Lens Design Problems,” in Genetic and Evolutionary Computation Conference, Proc. GECCO, 1347 - 1354 (2005)
[17] S. Thibault, C. Gagné, J. Beaulieu, M. Parizeau, “Evolutionary Algorithms Applied to Lens Design: Case Study and Analysis” in Optical Design and Engineering II, L. Mazuray, R. Wartmanneds, Ed., Proc. SPIE 5962, 66-76 (2005) [ DOI: 10.1117/12.625161]
[18] D. Vasiljevic, Classical and Evolutionary Algorithms in the Optimization of Optical systems: (Genetic Algorithms
and Evolutionary Computation, 9), 1° ed., Kluwer Academic Publishers, Boston. (2002)
[19] C. Gagné, J. Beaulieu, M. Parizeau, S. Thibault, “Human-Competitive Lens System Design with Evolution Strategies” Applied Soft Computing 8, 1439-1452 (2008)
[20] K. Deb, A. Pratap, S. Agarwal, T. Meyarivan, “A Fast and Elitist Multiobjective Genetic Algorithm: NSGA-II,”
IEEE Trans. on Evol. Comp. 6, 182-197 (2002)
[21] J. Branke, K. Deb, K. Miettinen, R. Slowinski, Multiobjective Optimization: Interactive and Evolutionary
Approaches, Springer-Verlag, Berlin (2008)
Proc. of SPIE Vol. 8131 813105-8
[22] C. M. Fonseca, P. J. Fleming, “Genetic algorithms for multiobjective optimization: Formulation, discussion and generalization,” in Fifth International Conference on Genetic Algorithms, Proc. 5th ICGA, 416-423 (1993)
[23] N. Srinivas and K. Deb “Multi-objective function optimization using non-dominated sorting genetic algorithm,”
Evol. Comput. 2, 221-248 (1994).
[24] J. Horn, N. Nafpliotis, D. E. Goldberg, “A niched Pareto genetic algorithm for multiobjective optimization” in IEEE
Conference on Evolutionary Computation, Proc. First IEEE Conf. Evol. Comp. 1 82-87 (1994)
[25] E. Zitzler, L. Thiele, “Multiobjective evolutionary algorithms: A compar- ative case study and the strength pareto approach,” IEEE Transactions on Evol. Comp. 3 , 257–271 (1999).
[26] E. Zitzler, M. Laumanns, L. Thiele SPEA2: “Improving the Strength Pareto Evolutionary Algorithm,” Computer
Engineering and Network Laboratory Technical Report 108, Swiss Federal Institute of Technology , Zurich (2001)
[27] J. Knowles, D. Corne, “The Pareto Archived evolution strategy: a new baseline algorithm for Pareto multiobjective optimization Pareto Archived Evolution Strategy,” in IEEE Conference on Evolutionary Computation, Proc. IEEE
CEC. 98-105 (1999)
[28] V.M. Mahajan, Optical Imaging and Aberration Part 1 Ray Geometrical Optics, SPIE, Washington, (1998).
[29] J. M. Sasián, "Theory of sixth-order wave aberrations," Appl. Opt. 49, D69-D95 (2010)
http://www.opticsinfobase.org/abstract.cfm?URI=ao-49-16-D69
[30] J. M. Sasian, M. R. Descour, "Power distribution and symmetry in lens systems", Opt. Eng. 37, 1001 -1004 (1998); doi:10.1117/1.601933
[31] L. Wang, J. M. Sasian, "Merit figures for fast estimating tolerance sensitivity in lens systems", Proc. SPIE 7652, 76521P (2010); doi:10.1117/12.868874
[32] “MATLAB user manual, Global Optimization Toolbox”, The MathWorks, Inc, R 2011a (2011).
Proc. of SPIE Vol. 8131 813105-9