Multi-Stage MMSE Weighted Decision Feedback Multi-User
Detector for DS-CDMA and MC-CDMA
Chen-Chu Hsu Yumin Lee
Graduate Institute of Comm. Eng. AndDept. of Electrical Eng., National Taiwan University
Taipei 10617, Taiwan
Abstract – In this paper, we propose the MMSE weighted
decision feedback (WDF) multi-user detector (MUD), which is an enhancement of the MMSE decision-feedback MUD. In contrast to MMSE-DF MUD, in MMSE-WDF past decisions are scaled by weighting factors that reflect their reliability. Furthermore, a multi-stage structure is utilized to improve the decision quality. An algorithm is also presented for jointly optimizing the reliability weighting factors and the coefficients of feedforward and feedback filters for every stage. Simulation results show that some variations of MMSE-WDF perform very
closely to the single-user bound for Eb/N0 lower than 25 dB and
the number of active users less than 30.
I. INTRODUCTION
Spread spectrum multi-user communication systems suffer from multiple access interference (MAI). Multi-user detection (MUD) [1,2] is a special receiver signal processing technique that mitigates MAI by treating them as signals and jointly detecting all users’ information symbols. MUD achieves performance gain over conventional (single-user) receivers because by treating MAI as signals rather than thermal noise the structure of MAI is exploited, thus realizing the full potentials of spread spectrum communications.
Direct-sequence code division multiple access (DS-CDMA) and multi-carrier CDMA (MC-CDMA) are widely discussed spread spectrum communication techniques for wireless communications. Unified signal models have been established for DS-CDMA and MC-CDMA [1-4]. MUD algorithms based on this unified signal model are in general applicable to both DS-CDMA and MC-CDMA. Some of these MUD algorithms include parallel and serial interference cancellation, and minimum mean square error decision feedback (MMSE-DF) MUD [1,2,5]. In parallel interference cancellation (PIC), MAI is estimated and subtracted from the received signal in parallel, while in successive interference cancellation (SIC) interference cancellation is performed successively. On the other hand, in MMSE-DF, the outputs of matched filter banks are linearly combined with past decisions to suppress MAI, where the combination coefficients are optimized using the MMSE criterion. A common feature of these MUD algorithms is that perfect past decisions are assumed. Unfortunately, the MAI estimate is inevitably noisy, and when the estimate is in
error, MAI can potentially be strengthened, instead of cancelled, by the action of PIC, SIC, or MMSE-DF MUD. A significant improvement to the PIC was suggested in [3], where a partial cancellation scheme was proposed. The nonlinear partial PIC (PPIC) appropriately scales the MAI estimates before being subtracted from the received signal, thus reducing the sensitivity to errors in the estimated MAI. In [3], these scaling factors are determined by trial-and-error. Further improvements to PIC and SIC, known as weighted interference cancellation (WIC), are proposed in [5]. In WIC, past decisions are scaled by weighting factors that reflect their reliability and can be computed using a simple algorithm.
In this paper, we extend the ideas presented in [5] to the MMSE-DF MUD, and propose a new multi-stage MUD referred to as the MMSE weighted decision feedback (MMSE-WDF) MUD. MMSE-WDF is less susceptible to errors in past decisions because in MMSE-WDF, past decisions are scaled by reliability weighting factors. Furthermore, a multi-stage structure is utilized to improve the decision quality. An algorithm is also derived for jointly optimizing the reliability weighting factors and the coefficients of feedforward and feedback filters on a stage-by-stage basis using the MMSE criterion.
II. SYSTEM MODEL
Consider the (one-shot) discrete-time baseband-equivalent signal model of synchronous DS-CDMA over flat fading channels or quasi-synchronous MC-CDMA over frequency-selective fading channels with K≥1 active users. The received signal can be modeled as an L×1 vector r given by
[
]
1 1 2 2 1 2 0 0 0 0 0 0 K K K A d A d A d = + = + = + r s s s z SAd z Pd z L L L M M O M M L , (1)where L is the spreading factor, sk, Ak and dk are, respectively,
white Gaussian noise vector with autocorrelation matrix E[zzH]=N
0IK.
Equation (1) is a well-known baseband-equivalent model for synchronous DS-CDMA systems operating in a flat-fading environment [2]. It can be shown that (1) can also model down-link and quasi-synchronous uplink MC-CDMA signals [4], which combine frequency-division multiplexing (OFDM) and CDMA techniques to combat delay-spread multipath fading. Algorithms proposed in this paper are derived based on (1), and are therefore equally applicable to DS-CDMA and MC-CDMA.
III. MULTISTAGE MMSE WEIGHTED DECESION FEEDBACK MULTI-USER DETECTION
Fig. 1 shows the block diagram of the s-th stage of MMSE-WDF. The decision of the s-th decision stage (s=1,…,S, where S is the total number of stages) for user k is given by
( )
( ) ( ) ˆs s k k d =Dec d% , (2) where 1 ( ) ( ) ( ) ( ) ( ) , , 1 1 ˆ L k s s s s s k i k i i k i i i i d F ∗r − B ∗ω ∗ d ∗ = = =∑
+∑
% ( ) ( 1) ( 1) , 1 ˆ K s s s i k i i i k B ∗ω − d − = + +∑
, (3)in which 0 ≤ ωi(s)≤ 1 is the reliability weighting factor for the
decision ˆ(s) i
d , Fi,k(s) and Bi,k(s) are respectively the
coefficients of the feedforward and feedback filters of the s-th stage, and Dec(·) is the decision function. The factor ωi(s) is
derived so that it increases monotonically with the probability of dˆi(s) =di. The parameter s* in (3) can be equal to s-1 or
s. When s* = s-1, the feedback filter only uses the decisions from previous stage. This case is referred to as the “parallelizable MMSE-WDF” (P-MMSE-WDF) because the detection of all users in each stage is fully parallelizable. On the other hand, when s* = s, decisions in current stage are used in feedback filter whenever possible. This is referred to as the serial or “non-parallelizable” MMSE-WDF (NP-MMSE-WDF). It can be seen from (3) that the fed-
r Feedforward Filter (F(s)) Feedback Filter (B(s)) s-th stage Decisionsdˆ( )s Reliability Weights for (s-1)-th stageDecisions (s−1) ω Reliability Weights for s-th stage Decisions
( )s
ω
reduce the effect of past decision errors. A special variation of NP-MMSE-WDF, referred to partial decision feedback (PDF), is obtained if only the decisions in the current stage are fed into the feedback filter, i.e., ωi(s-1) = 0 for i = k+1,…,K
in (3). An algorithm has also been derived to jointly optimize the filter coefficients Fi,k(s) and Bi,k(s) and reliability
weighting factors using the MMSE criterion. Details of the algorithm are shown in the appendix.
It should be noted that (2) and (3) include several previously proposed detectors as special cases. For example, setting all reliability weighting factors to 0 degenerates (2) and (3) into the conventional linear MMSE receiver. On the other hand, the conventional MMSE-DF corresponds to the single-stage NP-MMSE-WDF with PDF and unity reliability weighting factors.
IV. RELIABILITY WEIGHTING FACTORS AND FILTER COEFFICIENTS
The reliability weighting factors for the MMSE-WDF are derived by first recognizing that the detected symbol of the
k-th user at the s-th stage can be expressed as ( ) ( )
ˆs s k k k
d =m d , (4) where mk(s) is an equivalent multiplicative noise introduced to
model decision errors. For MMSE-WDF, the reliability weighting factors and filter coefficients are then derived by minimizing the estimated mean square error (MSE) of each user at every stage. Detailed derivations are given in the Appendix. It can be shown that the reliability weights and filter coefficients are functions of P, and can be computed as follows. First, we set ωk(0) = 0 for k = 1, 2, …, K. The
reliability weighting factors and filter coefficients for MMSE-WDF are then computed from s = 1 to s = S using the following recursions:
For k = 1 … K:
1. Determine the coefficients of feedforward and feedback filters according to (A.19).
2. Compute SIRk,min(s) using (A.21), and set the reliability
weighting factor to
(
)
( ) ( ) ( , ) 1 2 ,min s s o k s Q SIRk ω = − . (5) In (5), Q(•) is the Gaussian tail function defined as( )
1 exp 1 2 2 2 Q x t dt π ∞ =∫
− . (6)V. SIMULATION RESULTS
The performance of the proposed schemes is evaluated by computer simulation for synchronous uplink DS-CDMA over wireless communication channels. Information bits from each user are modulated using BPSK and spread using short scrambling sequences with spreading gain 32 as defined in the wideband CDMA specifications [6]. The wireless channels between the users and receivers are modeled as uncorrelated flat Rayleigh fading channels corrupted by AWGN, i.e., the channel gains Ak, k = 1…K, are independent
zero-mean circularly symmetric complex Gaussian random variables with unity variance, and are uncorrelated from symbol to symbol. Perfect channel estimation is assumed in these simulations. Furthermore, performance of conventional receivers including the linear MMSE MUD, MMSE-DF, and the single user bound (SUB) are also simulated as baselines for comparison.
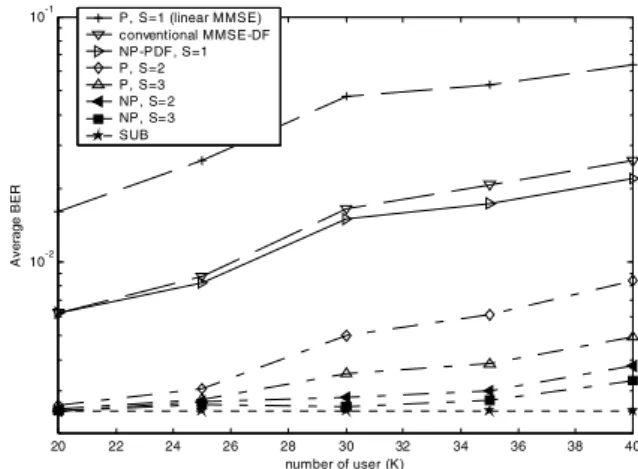
Fig. 2 shows the average BER as functions of K at 20dB
Eb/N0, while Fig. 3 shows the average BER as functions of
Eb/N0 when K=30, where Eb is the transmitted energy per user
bit. In the legend of these figures, “P” and “NP” respectively refer to P-MMSE-WDF and NP-MMSE-WDF. It can be seen from Fig. 2 that the single-stage NP-MMSE-WDF with PDF outperforms MMSE-DF as the number of active user increases. This is because MAI is more severe when K is large, and the reduction of error propagation due to reliability weighting in NP-MMSE-WDF is more obvious. Furthermore, Figs. 2 and 3 indicate that NP-MMSE-WDF significantly outperforms P-MMSE-WDF. This is because NP-MMSE-WDF always uses the newest decisions at the cost of longer decision delays. Finally, for
K≤30, with just 3 stages NP-MMSE-WDF performs very
closely to SUB when Eb/N0 < 25 dB as shown in Figs. 2 and
3.
VI. CONCLUSION
A generalized multi-stage multi-user detector referred to as MMSE weighted decision feedback (MMSE-WDF) is proposed in this paper. In contrast to conventional MMSE decision-feedback MUD, in MMSE-WDF decisions are weighted by reliability weighting factors before being feedback. Two variations of MMSE-WDF are discussed. The parallelizable MMSE-WDF (P-MMSE-WDF) uses only decisions from the previous stage for MAI cancellation, while the nonparallelizable MMSE-WDF (NP-MMSE-WDF) also uses decisions from the current stage. An algorithm is also
20 22 24 26 28 30 32 34 36 38 40 10-2 10-1 number of user (K) Av e ra g e BER P, S=1 (linear MMSE) conventional MMSE-DF NP-PDF, S=1 P, S=2 P, S=3 NP, S= 2 NP, S= 3 SUB
Fig. 2 Capacity figure of MMSE-WDF, linear MMSE, and MMSE-DF under the condition of 20 dB Eb/N0. 10 12 14 16 18 20 22 24 26 28 30 10-3 10-2 10-1 Eb/N 0 (dB) A v erage B E R P, S=1 (linear M MSE) conventional MMSE-DF NP-PDF, S=1 P, S=2 P, S=3 NP, S=2 NP, S=3 SUB
Fig. 3 Comparisons of MMSE-WDF, linear MMSE, and MMSE-DF with
K=30.
proposed to systematically and jointly optimize reliability weighting factors and coefficients of feedforward and feedback filters on a stage by stage basis using MMSE criterion. Simulation results show that 1) with the same number of stages, NP-MMSE-WDF significantly outperforms P-MMSE-WDF, 2) when optimal reliability weighting factors and filter coefficients are used, the NP-MMSE-WDF performs very closely to the single-user bound for Eb/N0 lower than 25 dB and the number of active users less than 30.
RERFERENCES
[1] S. Moshavi, “Multi-user Detection for DS-CDMA Communications,”
IEEE Commum. Mag., pp. 124-136, Oct. 1996.
[2] Sergio Verdu, Multiuser Detection, Cambridge University Press, 1998.
[3] Divsalar, D.; Simon, M.K.; Raphaeli, D, “Improved parallel interference cancellation for CDMA,” IEEE Transactions on Communications, Volume: 46 Issue: 2, P.258 –268, Feb. 1998.
[4] Yi-Lin Li, Yumin Lee, “A Novel Low-Complexity Near-ML Multiuser Detector for DS-CDMA and MC-CDMA Systems,” 2002 IEEE Global
Telecommunications Conference, November 2002.
[5] Chen-Chu Hsu and Yumin Lee, “A New Multi-Stage Weighted Interference Cancellation Multiuser Detector With User Ordering for DS-CDMA,” IEEE Wireless Communication and Networking
Conference, March 2003.
[6] 3G TS 25.213 V4.1.0 “3rd Generation Partnership Project; Technical
Specification Group Radio Access Network; Spreading and modulation (FDD) (Release 4)”, 2001-06. http://www.3gpp.org.
[7] Simon Haykin, Adaptive Filter Theory, 2nd ed. Prentice-Hall, Inc, 1991.
[8] Henry Stark, John W. Woods, Probability, Random Processes, and
Estimation Theory for Engineers, 2nd ed. Prentice-Hall, Inc, 1994.
APPENDIX
In this Appendix we derive the reliability weighting factors and coefficients of feedforward and feedback filters for MMSE-WDF. As mentioned earlier, the decision of the k-th user at the s-th stage can be expressed as
( ) ( )
ˆs s k k k
d =m d , (A.1) where mk(s) is a discrete random variable with at most M 2
possible values, where M is the cardinality of the signal constellation. Although the derivations to be presented can be extended to the general case, in the following we assume, for simplicity, that dk = 1 or –1 with equal likelihood for all k.
In this case, we have
( ) ( ) ( ) 1 with probability 1 with probability 1-s k s k s k p m p − = , (A.2) where
(
)
( )s Prob ˆ( )s k k k p = d ≠d . (A.3) From (3), we have ( ) ( ) ( ) ( ) ( ) ( ) s s H s H k k k s s s k k k d% =F B Ω M dr , (A.4)where Fk(s) is an L×1 vector, Bk(s), and dk(s) are K×1 vectors
respectively denoted by
[
]
[
]
( ) 1, , 1,0, 1, , T s k ≡ d dk− dk+ dK d L L , (A.7)while Ωk(s) and Mk(s) are K×K diagonal matrices with j-th
diagonal component respectively given by
( )
( *) ( ) , ( 1) for 0 for for s j s k j j s j j k j k j k ω ω − < = = > Ω (A.8) and( )
( *) ( ) , ( 1) for 0 for for s j s k j j s j m j k j k m − j k < = = > M.
(A.9) Assuming that(
( )s ( )s ( )s)(
( )s ( )s ( )s)
H( )
( )s 2 k k k k k k k E = Ω M d Ω M d Ω (A.10)and mk(s) is independent of dk, pk(s) can be estimated by
(
)
( )s ( )s
k k
p =Q SIR , (A.11)
where Q(•) is the Gaussian tail function defined in (6) and
SIRk(s) is the s-th stage relevant signal to interference ratio
encountered by k-th user, given by
(
)
(
)
2 ( ) ( ) 2 ( ) ( ) Re Re s H K k k s k s s H K k k k E SIR E d = − F Pe F Pe %,
(A.12)and ekK is k-th K×1 standard vector. Hence, from (A.2) we
have
(
)
( )s 1 2 ( )s
k k
E m = − Q SIR . (A.13) It is desirable to minimize the average probability of error of the S-th stage given by
(
( ))
1 1 K ˆS av k k k P prob d d K = ≡∑
≠ . (A.14) (A.4) to (A.13) can be used recursively to express Pav interms of all weightings, and in principle all filter coefficients and reliability weighting factors that minimize Pav can be
defined as 2 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 2 Re 1 s s k k k s s H s H s k s H K k k k s k k k E d d ε ≡ − = Σ − + F F B F Pe B % , (A.15) where ( ) ( ) 0 ( ) ( )2 H s H s K k k s s k k N + Θ Σ ≡ Θ PP I Ω , (A.16) and
( )
(
)
( )s ( )s ( )s K K T H k k E k K k k Θ ≡Ω M I −e e P . (A.17)Furthermore, by the orthogonality principle the solutions satisfy
(
( ))
( ) ( ) ( ) s k k s s s k k k E d ∗−d∗ = r 0 Ω M d % , (A.18)and one of them is given by
(
)
( )
(
)
( ) ( ) , 1 ( ) ( ) , 0 ( ) ( ) , , s s k opt k s s H K k opt k K k T s K K H s k opt K k k k opt E N − = = + = − − Ω M F PΠ P I Pe B I e e P F , (A.19) where(
)
2(
( )
)
( ) ( ) , T s s K K k ≡ K− k opt K− k k Π I Ω I e e . (A.20)The corresponding SIRk,min(s) in (A.12) is given by