表面聲波元件之條紋陣列的反射與透射
84
0
0
全文
(2) 表面聲波元件之條紋陣列的反射與透射 Reflection and Transmission on Grating Arrays in Surface Acoustic Wave Devices 研 究 生:孫繼增. Student:Ji-Tzeng Sun. 指導教授:尹慶中 博士. Advisor:Dr. Ching-Chung Yin. 國立交通大學 機械工程學系碩士班 碩士論文. A Thesis Submitted to Department of Mechanical Engineering College of Engineering National Chiao Tung University in Partial Fulfillment of the Requirements for the Degree of Master of Science in Mechanical Engineering July 2005 Hsinchu, Taiwan, Republic of China. 中華民國 九十四 年 七 月.
(3) 表面聲波元件之條紋陣列的反射與透射. 研究生:孫繼增. 指導教授:尹慶中 博士. 國立交通大學機械工程學系碩士班. 摘. 要. 本研究分析層狀結構表面聲波受到表面金屬條紋陣列之反射與透射 波傳,討論不同條紋陣列及各項設計參數對於表面聲波傳遞特性的影 響。本文以 Stroh 的推導方式建立八階壓電波動方程式,計算 Al/ZnO/Glass 層狀介質表面聲波相速度頻散曲線。條紋陣列的反射與透射波傳分析係 利用位移應力狀態向量與水平方向波傳傳遞矩陣,搭配條紋金屬柵極的 邊界連續條件進行推導。模擬分析結果顯示,當表面聲波斜向入射條紋 陣列時,若條紋寬度與間距等距,反射波傳的建設性干涉發生在條紋寬 與波長比值為 0.25 的奇數倍處。條紋寬度與間距不等時,反射波傳的建 設性干涉趨向條紋寬與波長比值為 0.5 的奇數倍處。條紋數量增加將使得 反射率的極值頻率集中,條紋高度提昇卻使得極值頻率的頻寬增加,兩 者都會加強反射波傳的建設性干涉。本文將可作為表面聲波濾波器設計 的參考,提昇設計的精準度。. i.
(4) Reflection and Transmission on Grating Arrays in Surface Acoustic Wave Devices Student: Ji-Tzeng Sun. Advisor: Dr. Ching-Chung Yin. Department of Mechanical Engineering National Chiao Tung University. ABSTRACT This thesis presents a study of the propagation of surface acoustic waves in a single and periodic array of metal strip overlays on the surface of layered substrates. Responses of reflected and transmitted surface acoustic waves due to various geometric design parameters of the grating arrays are investigated. An eight-dimensional matrix formulation based on Stroh formalism is adopted to analyze wave propagation in piezoelectric layered media. The dispersion curves for aluminum-zinc oxide films on glass substrates are determined using surface impedance tensor method. A transfer matrix in terms of the state vectors in cooperation with continuity conditions on edges of the grating array is used to determine the reflectivity and transmittance of the horizontally propagating surface acoustic waves. Simulation results indicate that constructive interferences occur in reflectivity at one quarter of an odd number times the ratio of strip width to wavelength perpendicular to the gratings in case that surface acoustic waves obliquely impinge on an array of gratings for the strip width equal to the gap between strips. The constructive interferences move to one half of an odd number times the ratio of strip width to the wavelength in case of the strip width unequal to the gap. The bandwidth of extreme reflectivity becomes broader if the number of gratings decreases or the height of the strip increases. Both cases enhanced the constructive interference in reflectivity spectra. The present method provides an accurate model for design of surface acoustic wave filters. ii.
(5) 誌. 謝. 在此論文定稿之際,衷心的感謝指導教授. 尹慶中博士兩年來的栽. 培與指導,讓論文能如期付梓,順利完成學業,在此深表謝意。在研究 過程中,常有遇到困難與問題,老師總能適時的提供寶貴的意見,使我 能克服研究中所遭遇的瓶頸。此外,也謝謝學長游泰和、許世明、劉育 翔、王多聞及溫子逵,他們提供了我最好的生活經驗。加上同學許家豪、 黃俊傑與蔡德新兩年來的互相扶持,使我在研究過程更順利。張桓禎、 黃國彰及陳俊宏等同門學弟對我的支持也使我深感欣慰。最後感謝父母 多年來辛苦的栽培,以及家人的支持與鼓勵,使我能有今天的成就。 僅以此論文獻給所有幫助過我,陪我走過這一段歲月的師長、同濟、 家人與朋友,沒有你們,也就沒有這篇論文的誕生,由衷的感謝大家, 謝謝!. iii.
(6) 目. 錄. 中文摘要. i. 英文摘要. ii. 誌謝. iii. 目錄. iv. 圖表目錄. vi. 第一章 前言. 1. 1.1 研究背景. 1. 1.2 文獻回顧. 2. 1.3 研究內容. 3 5. 第二章 表面聲波波傳理論 2.1 層狀結構表面聲波頻散分析. 5. 2.1.1 表面聲波頻散方程式. 5. 2.1.2 雷利波與拉夫波. 10. 2.1.3 ZnO/Glass 與 Al/ZnO/Glass 表面聲波頻散曲線. 12. 2.2 頻率響應分析. 13. 2.2.1 脈衝函數模型. 13. 2.2.2 IDT/ZnO/Glass 表面聲波頻率響應. 15 16. 第三章 條紋陣列波傳分析 3.1 表面聲波的水平波傳. 16. 3.2 條紋陣列的反射與透射. 17 22. 第四章 結果與分析 4.1 條紋陣列的頻率響應分析. 22. 4.1.1 條紋寬度與入射角度. 22. iv.
(7) 4.1.2 條紋數量的改變. 23. 4.1.3 條紋的高度變化. 24. 4.1.4 條紋寬度與間距不相等. 24. 4.2 初始條件對頻率響應的影響. 25. 4.2.1 頻散效應與反射率. 25. 4.2.2 斜向入射與垂直入射. 26. 4.2.3 反射率的全域凹陷現象. 26 28. 第五章 結論與展望 5.1 結論. 28. 5.2 未來展望. 29. 參考文獻. 30. 附錄 A 八階材料性質矩陣分量. 32. 附錄 B 波傳阻抗與反射係數. 34. 附錄 C 表面聲波波傳方程式. 36. 附錄 D 表面聲波元件的製作與實驗架設. 39. 附表. 43. 附圖. 47. v.
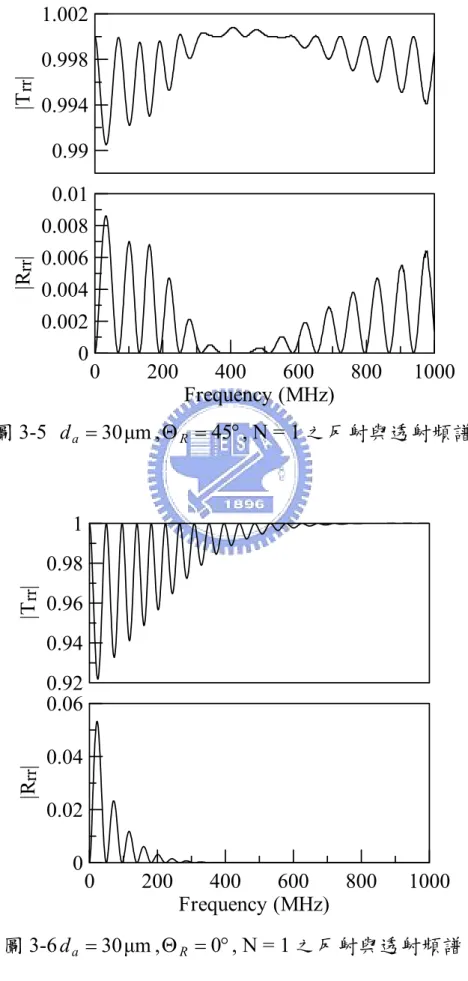
(8) 圖表目錄 表 2-1 鈉鈣玻璃材料常數. 43. 表 2-2 氧化鋅材料常數. 43. 表 2-3 純鋁材料常數. 44. 表 2-4 交指叉換能器設計參數. 44. 表 D-1 條紋陣列設計參數. 46. 圖 2-1 材料坐標與波傳示意圖. 47. 圖 2-2 單層半無限域材料. 47. 圖 2-3 N 層半無限域材料. 48. 圖 2-4 IDT/ZnO/Glass 結構示意圖. 48. 圖 2-5 ZnO(1µm)/Glass 表面聲波相速度頻散曲線. 49. 圖 2-6 Al(0.5µm)/ZnO(1µm)/Glass 表面聲波相速度頻散曲線. 49. 圖 2-7 ZnO(1.5µm)/Glass 表面聲波相速度頻散曲線. 50. 圖 2-8 Al(0.5µm)/ZnO(1.5µm)/Glass 表面聲波相速度頻散曲線. 50. 圖 2-9 IDT 的脈衝函數模型. 51. 圖 2-10 IDT 頻率響應模擬結果(N = 61, d = 6µm). 51. 圖 3-1 反射條紋陣列剖面圖. 52. 圖 3-2 條紋陣列與波傳示意圖. 52. 圖 3-3 d a = 3 µm , Θ R = 45° , N = 1 之反射與透射頻譜. 53. 圖 3-4 d a = 3 µm , Θ R = 0° , N = 1 之反射與透射頻譜. 53. 圖 3-5 d a = 30 µm , Θ R = 45° , N = 1 之反射與透射頻譜. 54. 圖 3-6 d a = 30 µm , Θ R = 0° , N = 1 之反射與透射頻譜. 54. 圖 4-1 波傳方向示意圖. 55. vi.
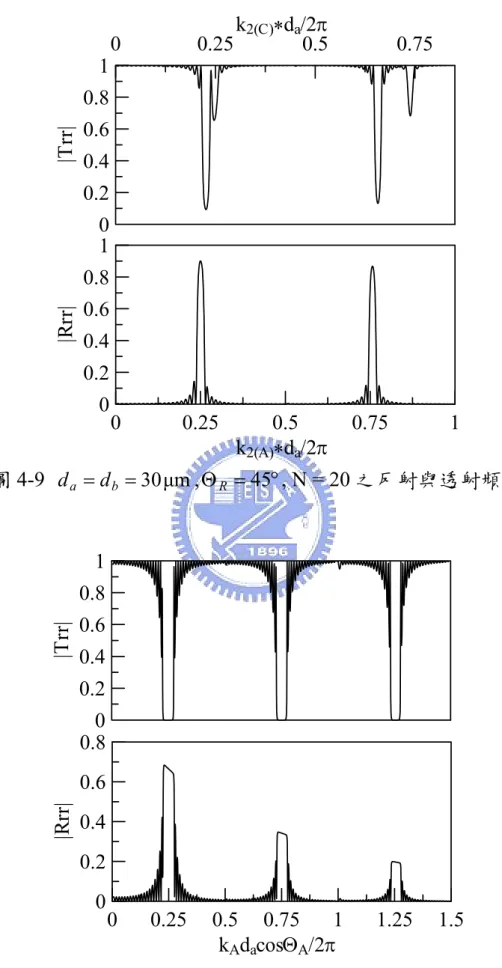
(9) 圖 4-2 d a = d b = 3 µm , Θ R = 45° , N = 5 之反射與透射頻譜. 55. 圖 4-3 d a = d b = 3 µm , Θ R = 0° , N = 5 之反射與透射頻譜. 56. 圖 4-4 d a = d b = 30 µm , Θ R = 45° , N = 5 之反射與透射頻譜. 56. 圖 4-5 d a = d b = 30 µm , Θ R = 0° , N = 5 之反射與透射頻譜. 57. 圖 4-6 反射波波傳示意圖. 57. 圖 4-7 d a = d b = 3 µm , Θ R = 45° , N = 20 之反射與透射頻譜. 58. 圖 4-8 d a = d b = 3 µm , Θ R = 0° , N = 20 之反射與透射頻譜. 58. 圖 4-9 d a = d b = 30 µm , Θ R = 45° , N = 20 之反射與透射頻譜. 59. 圖 4-10 d a = d b = 30 µm , Θ R = 0° , N = 20 之反射與透射頻譜. 59. 圖 4-11 鋁薄膜厚度變化之頻散曲線圖. 60. 圖 4-12 鋁薄膜覆蓋厚度不同之雷利波相速度比較. 60. 圖 4-13 1µm 厚 Al, d a = db = 30 µm , Θ R = 45° , N = 20 之反射與透射頻譜 圖 4-14 1µm 厚 Al, d a = d b = 30 µm , Θ R = 0° , N = 20 之反射與透射頻譜. 61. 61. 圖 4-15 d a , d b = 3, 30 µm , Θ R = 45° , N = 20 之反射與透射頻譜. 62. 圖 4-16 d a , d b = 30, 3 µm , Θ R = 45° , N = 20 之反射與透射頻譜. 62. 圖 4-17 d a , d b = 1, 30 µm , Θ R = 45° , N = 20 之反射與透射頻譜. 63. 圖 4-18 d a , d b = 30, 1µm , Θ R = 45° , N = 20 之反射與透射頻譜圖. 63. 圖 4-19 d a , d b = 0.5, 30 µm , Θ R = 45° , N = 20 之反射與透射頻譜. 64. 圖 4-20 d a , d b = 30, 0.5 µm , Θ R = 45° , N = 20 之反射與透射頻譜. 64. 圖 4-21 Al( 0.5 µm )/ZnO(1.5 µm )/Glass 的第一模態雷利波頻散曲線. 65. 圖 4-22 非條紋區與條紋區的 x2 方向波數比. 65. vii.
(10) 圖 4-23 d a = d b = 30 µm , Θ R = 45° , N = 20 之反射率頻譜. 66. 圖 4-24 1µm 厚 Al, d a = 30 µm , Θ R = 45° , N = 1 之反射率響應. 66. 圖 4-25 1µm 厚 Al, d a = 30 µm , Θ R = 45° , N = 1 之反射率響應. 67. 圖 4-26 1.5 µm 厚 ZnO, d a = 30 µm , Θ R = 45° , N = 1 之反射率響應. 67. 圖 4-27 d a = d b = 30 µm , Θ R = 45° , N = 5 之反射率響應. 68. 圖 4-28 d a = 3µm , Θ R = 45° , N = 1 之反射率響應. 68. 圖 4-29 d a = 3µm , Θ R = 15° , N = 1 之反射率響應. 69. 圖 4-30 d a = 3µm , Θ R = 0° , N = 1 之反射率響應. 69. 圖 D-1 交指叉換能器製作流程圖. 70. 圖 D-2 反射條紋配置圖. 72. 圖 D-3 真空固定座. 72. 圖 D-4 真空固定座吸盤. 73. 圖 D-5 真空固定座基座. 73. 圖 D-6 交指叉換能器頻率響應量測示意圖. 74. viii.
(11) 第一章 前言 1.1 研究背景 隨著科技產業的進步,各種元件逐漸走向微小、功能性與精密製 動,壓電材料與其應用也就相形重要。1965 年 White 與 Voltmer 發展 出交指叉換能器(interdigital transducer, IDT)以來,各種表面聲波元件 蓬勃的發展,已大量的應用於各種領域,尤其在通訊電子元件。時至 今日,訊號產生之振盪器(resonator)、接收之感測器(sensor),與各式 各樣的濾波器(filter)等,都可以看到表面聲波元件的蹤跡。 通訊產業的電子信號頻率日益增高,表面聲波濾波器在設計與製 程上也愈趨困難,為了在有限的空間中尋求最佳之設計,目前表面聲 波濾波器多致力於高頻的發展。但在高頻應用之外,表面聲波濾波器 的彈性波傳模擬分析,卻是目前較少研究之議題。 表面聲波濾波器的主要功能在於過濾雜訊及無用的頻率訊號,只 擷取或阻擋特定頻率範圍的訊號。目前最廣為應用之表面聲波濾波器 的模擬分析為模態耦合理論(coupling-of-modes, COM),此一理論原本 是應用於光波導分析,當應用在表面聲波元件之條紋陣列(亦稱為金 屬柵欄)的分析時,必須將表面聲波近似為一只含橫向位移的橫波, 忽略縱向位移的部分。若基底為層狀介質時,表面聲波會有多模態以 及頻散現象的產生,當彈性波垂直入射條紋陣列時,此一簡化並不會 有太大的誤差。若彈性波為斜向入射時,由於忽略了不同波式間的互 相耦合(mode conversion),以及頻散現象造成表面聲波相速度的改 變,使得此一理論無法有效的運用與模擬。 本研究主要分析層狀介質表面聲波濾波器的金屬條紋對於彈性 波波傳的影響。除了推導層狀介質表面聲波的波傳阻抗及計算頻散曲 1.
(12) 線,利用波傳的連續條件,在不同的設計參數下,分析斜向或垂直入 射金屬條紋陣列的表面聲波之反射與透射率變化,提昇表面聲波濾波 器設計理論的完整性及精確度。. 1.2 文獻回顧 1885 年,英國學者 Rayleigh [1]從地震的研究中,推論在縱波與 剪力波之外,尚有一種沿著半無限域彈性體表面傳播之表面聲波 (surface acoustic waves, SAW),其偏振方向位於波傳方向與半無限域 表面法向量所張成 Sagittal 平面上。此一發現在地震研究外,初期並 無長足的發展。在等向性層狀結構中,橫向偏振的表面聲波才會存 在,稱為拉夫波(Love waves)。 直到 1965 年,White 與 Voltmer [2]研發出交指叉換能器,利用 石英基材(substrate)之壓電特性,將電磁波轉換為機械能,產生雷利 表面聲波(Rayeigh waves),開啟了表面聲波元件之應用。Bleustein [3] 與 Gulyaev [4]先後於 1968 年及 1969 年,發現橫向偏振的表面聲波 (SH-SAW)會存在於半無限域的壓電晶體,後來稱之為 Bleustein– Gulyaev waves。 在層狀結構的表面聲波元件設計上,Kino 與 Wager [5]在 1973 年,提出了將具壓電性質的氧化鋅(ZnO)鍍於非壓電基材上,產生表 面聲波。1977 年時,Shimizu 和 Hata [6]將氧化鋅鍍於玻璃基板,利 用交指叉換能器製作出單向波傳的表面聲波元件。 在表面聲波的波傳分析上,Braga 與 Herrmann [7]於 1988 年,應 用 Stroh (1962) [8]所提出推導異向材料半無限域表面聲波的六階矩 陣,推導異向材料層狀結構之表面波傳分析。隨後於 1991 年,Honein 等人[10],將電位移與電位併入考慮,擴展理論推導至壓電材料上,. 2.
(13) 成為一八階之壓電波動方程式,並引入 Barnett 與 Lothe (1985)[11]所 提出的表面阻抗張量(surface impedance tensor)概念,使得全部的理論 推導更加完備。 Tancrell 與 Holland 於 1971 年提出脈衝函數模型(delta function model) [13],有效的模擬交指叉換能器的工作頻率,雖然此模型只適 用於非頻散之波傳,且做了許多的簡化,但對於表面聲波元件頻率響 應之估算,仍有相當大的幫助。到了 1998 年,Hachigo 和 Malocha [15] 進一步配合波傳的頻散關係,將此一脈衝函數模型做一修正,使得頻 率響應之估算能更加準確。 在金屬條紋陣列的設計與分析上,目前最廣為使用的是模態耦合 理論。模態耦合理論源於 1954 年,由 Pierce [16]於光波導分析上發展 出來。到了 1977 年,Cross 與 Schmidt [17]才將此一模型應用於表面 聲波元件分析。Abbott、Hartmann 及 Malocha [18~19]在 1989 年時, 針對原本的耦合理論做了進一步修正,使得模態耦合理論能更加準 確。至今,模態耦合理論被廣泛地運用於垂直入射之表面聲波濾波器 的設計與模擬。. 1.3 研究內容 本研究主要分三個部分,第一部份為層狀介質表面聲波元件基礎 理論的推導,於本文中編排為第二章。此章利用八階壓電波動方程式 [6-9]推導層狀介質表面聲波的頻散方程式,並利用邊界條件區分雷利 波及拉夫波。此外,利用脈衝函數模型[12-14]估算表面聲波元件之頻 率響應。 第二部分則為斜向入射金屬條紋陣列的表面聲波波傳分析,列於 本文的第三章。條紋陣列位於表面聲波波傳路徑,只做為反射器,不. 3.
(14) 具致動性質,因此不施加電位於條紋陣列,其電性條件設為開放電 路。本章除了求出完整的表面聲波的波傳方程式,最主要的部分是利 用波傳位移及應力的邊界連續條件,探討在不同設計參數下,表面聲 波斜向入射條紋陣列的反射與透射率。 第四章則為本文的第三部分,主要針對條紋陣列的各種幾何邊界 變化分別予以模擬,分析出條紋的寬度、間距、數量…等設計參數對 於反射與透射率的影響。除了條紋陣列本身的變外外,尚討論了波傳 的初始條件改變對於反射與透射的影響,以期能作為未來表面聲波元 件與濾波器設計的參考。 本文的第六章對於本研究做一總結,敘述未來的應用與發展。. 4.
(15) 第二章 表面聲波波傳理論 2.1 層狀結構表面聲波頻散分析 2.1.1 表面聲波頻散方程式 壓電材料的統御方程式包括運動方程式與靜電方程式,在不考慮 徹體力作用下可表示為. σ ij , j = ρu&&i. (2.1). Di ,i = 0. (2.2). 其中,σ ij 為科西應力張量(Cauchy stress tensor), ρ 為材料質量密度, u i 為位移向量的分量, Di 則是電位移向量的分量。應力分量及電位. 移與位移及電位 φ 有關,可分別表示成下二式: E σ ij = Cijkl u k ,l + elijφ,l. (2.3). Di = eikl u k ,l − ε ilS φ,l. (2.4). E 此處, Cijkl 為固定電場強度下之材料剛性係數, elij 和 ε ilS 分別為壓電常. 數及應變固定條件下的介電常數,下標 i, j , k , l = 1, 2, 3 。 考慮如圖 2-1 所示的一個正交座標系及半無限域彈性體,其中. m1 , m 2 , m 3 分別為 x1 , x2 , x3 三個座標軸上之基底向量,半無限域之表 面法向量為 m 3 。材料表面曳力向量 τ 與法線方向之電位移分量 D3 分 別定義如下:. τ i = σ ij m3 = σ i 3. (2.5). D3 = Di m3. (2.6). 將(2.3)、(2.4)式代入(2.5)、(2.6)式,並代回壓電材料的統御方程 式(2.1)、(2.2),並分別將各式中對 x3 座標微分之狀態因子整理提出, 將其化簡為八階波動方程(Honein et al [9])。 5.
(16) ∂ 3ξ = Γξ. (2.7). 其中,ξ 為位移、電位移、曳力與電位所組成之狀態向量(state vector),. ξ = [u iD3 iτ φ ]. T. (2.8). Γ 則為一 8 × 8 矩陣,將 Γ 分隔成如下數個子矩陣: ⎡ Γ11 ⎢Γ 21 Γ=⎢ ⎢ Γ 31 ⎢ ⎣Γ 41. Γ12 Γ13 Γ14 ⎤ Γ 22 Γ 23 Γ 24 ⎥ ⎥ Γ 32 Γ 33 Γ 34 ⎥ ⎥ Γ 42 Γ 43 Γ 44 ⎦. (2.9). 各項子矩陣詳見於附錄 A。若考慮一沿 [cosθ , sinθ ,0] 方向傳遞之時諧 波(time-harmonic wave),應用分離變數法,將其位移、電位移、表面 曳力及電位假設如下: u( x, x3 , t ) = u ( x3 )e i (k ⋅x −ωt ). (2.10a). D3 ( x, x3 , t ) = D3 ( x3 )e i (k ⋅x−ωt ). (2.10b). τ (x, x3 , t ) = τ ( x3 )e i (k ⋅x−ωt ). (2.10c). φ (x, x3 , t ) = φ ( x3 )e i (k⋅x−ωt ). (2.10d). 上式中,k 代表波向量(wave vector),其於 x1 、 x2 方向的分量分別為 波數 k1 與 k 2 , ω 為角頻率。假設上述半無限域為均質材料,將(2.10) 式代回(2.7)式,可化簡為一微分方程式,. ∂ 3 ξ = iN ξ. (2.11). ξ ( x3 ) = e iN x3 ξ (0). (2.12). 其中, N為一與x3座標無關之 8 × 8 材料性質矩陣, ξ 為一與x3座標相 關的狀態向量, ξ ( x3 ) = [u iD3 iτ φ ]. T. (2.13). 6.
(17) N12 N13 N14 ⎤ N 22 N 23 N 24 ⎥ ⎥ N 32 N 33 N 34 ⎥ ⎥ N 42 N 43 N 44 ⎦. ⎡ N11 ⎢N 21 N=⎢ ⎢ N 31 ⎢ ⎣N 41. (2.14). N 矩陣之各各項子矩陣如下: N11 = − kα Q*(m 3 ) −1 R*(m 3 , mα ). N12 =. −1. ε 33. (2.15a). Q*(m 3 ) −1 S(m 3 ). (2.15b). N13 = −Q*(m 3 ) −1. (2.15c). N14 = − kα Q*(m 3 ) −1 P*(m 3 , mα ). (2.15d). ⎡P*(m β , mα ) ⎤ ⎢ ⎥ N 21 = kα k β − 1 ⎢− P*(m 3 , m α ) Q*(m 3 ) R*(m 3 , m β )⎥ ⎣ ⎦. (2.15e). N 22 =. − kα. ε 33. [P*(m , m 3. α ) Q*(m 3 ). −1. S(m 3 ) + ε 3α. ]. (2.15f). N 23 = − kα P*(m 3 , mα ) Q*(m 3 ) −1. N 24. (2.15g). ⎡P*(m 3 , mα ) Q*(m 3 ) −1 P*(m 3 , m β )⎤ ⎢ ⎥ = − kα k β ⎢ ⎥ ε 3α ε 3 β ⎢+ ε αβ − ⎥ ε 33 ⎣⎢ ⎦⎥. (2.15h). ⎡R*(m 3 , mα ) T Q*(m 3 ) −1 R*(m 3 , m β )⎤ ⎥ − ρω 2 I N 31 = − kα k β ⎢ ⎢− R*(mα , m β ) ⎥ ⎣ ⎦. (2.15i) N 32 =. kα. ε 33. [P(m. α , m3 ). − R*(m 3 , mα ) T Q*(m 3 ) −1 S(m 3 ). N 33 = − kα R*(mα , m 3 ) Q*(m 3 ) −1. N 34. ⎡P*(mα , m β ) ⎤ ⎥ = kα k β ⎢ ⎢− R*(mα , m 3 ) Q*(m 3 ) −1 P*(m β , m 3 )⎥ ⎣ ⎦ 7. ]. (2.15j) (2.15k) (2.15l).
(18) N 41 = N 42 =. N 43 = N 44 =. kα. ε 33. [P(m. α , m 3 ) − S(m 3 ) Q*(m 3 ). −1. R*(m3 , mα ). ]. S(m 3 ) ⎤ −1 ⎡ S(m 3 ) Q*(m 3 ) −1 − 1⎥ ⎢ ε 33 ⎣ ε 33 ⎦. −1. ε 33. (2.15n). S(m 3 ) Q*(m 3 ) −1. − kα. ε 33. [S(m ) Q*(m ) 3. 3. (2.15m). (2.15o) −1. P*(mα , m 3 ) + ε 3α. ]. (2.15p). 其中, R (a, b) 、 R*(a, b) 、 P (a, b) 、 P*(a, b) 、Q(n)、S(n)之定義詳見 於附錄 A。 令 Ψ α 為矩陣 N 之特徵值,[A α , L α ] 為對應之特徵向量,將材料 T. 矩陣 N 對角化為. ⎡ A1 A 2 ⎤ ⎡ Ψ 1 0 ⎤ ⎡ A1 A 2 ⎤ N=⎢ ⎥⎢ ⎥⎢ ⎥ ⎣ L1 L 2 ⎦ ⎣ 0 Ψ 2 ⎦ ⎣ L1 L 2 ⎦. −1. (2.16). 其中, Ψ1 = diag(ζ 1 ,ζ 2 ,ζ 3 ,ζ 4 ). (2.17a). Ψ 2 = diag(ζ 5 ,ζ 6 ,ζ 7 ,ζ 8 ). (2.17b). 此處 Ψ α 代表了沿著x3軸方向之波數分量,下標 1 者代表了往正x3方向 波傳或衰減之諧波(或稱為上傳波),而 2 則代表了往負x3方向波傳或 衰減之諧波(或稱為下傳波),ζ i (i = 1 ~ 8) 又稱為矩陣N的Floquet波數。 將(2.16)式代回(2.12)式,可將 ξ ( x3 ) 展開如下: −1. 0 ⎤ ⎡ A1 A 2 ⎤ ⎡ A1 A 2 ⎤ ⎡Φ1 ( x3 ) ξ ( x3 ) = ⎢ ξ ( 0) ⎥⎢ Φ 2 ( x3 )⎥⎦ ⎢⎣ L1 L 2 ⎥⎦ ⎣ L1 L 2 ⎦ ⎣ 0. (2.18). Φ1 ( x3 ) = diag(e iζ 1 x3 , eiζ 2 x3 , eiζ 3 x3 , eiζ 4 x3 ). (2.19a). Φ 2 ( x3 ) = diag(eiζ 5 x3 , eiζ 6 x3 , eiζ 7 x3 , eiζ 8 x3 ). (2.19b). 其中,. 8.
(19) (2.18)式之通解一般表示為 0 ⎤ ⎧ C1 ⎫ ⎧U ( x3 )⎫ ⎡ A1 A 2 ⎤ ⎡Φ1 ( x3 ) ⎨ ⎬ ⎨ ⎬=⎢ ⎥⎢ Φ 2 ( x3 )⎥⎦ ⎩C2 ⎭ ⎩ T ( x3 ) ⎭ ⎣ L1 L 2 ⎦ ⎣ 0. (2.20). 其中,C1與C2為常數向量,狀態向量 U( x3 ) 和 T ( x3 ) 則表示如下:. U ( x3 ) = [u1 ( x3 ), u 2 ( x3 ), u3 ( x3 ), iD3 ( x3 )]. (2.21a). T ( x3 ) = [iτ 1 ( x3 ), iτ 2 ( x3 ), iτ 3 ( x3 ),φ ( x3 )]. (2.21b). T T. 將(2.20)式重新整理,並引用波傳阻抗之定義,則 U( x3 ) 和 T ( x3 ) 之關係可以重新推導如下:. T ( x3 ) = G ( x3 ) U ( x3 ). (2.22). 其中, G ( x3 ) 稱為波傳阻抗張量(impedance tensor),其定義與推導詳 見附錄 B。至此,若進一步配合半無限域介質表面的邊界條件,即可 求得表面聲波相速度頻散方程式。 將以上推導擴展至如圖 2-3 所示之 N 層半無限域層狀介質,參 照附錄 B 之推導與定義,可得 T ( x3 ) = G m ( x3( m ) ) U ( x3 ). (2.23). G 0 = Z 02. (2.24). [. ][. G m ( x3( m ) ) = Z1m H m ( x3( m ) ) + Z 2m H m ( x3( m ) ) + I. ]. −1. H m ( x3( m ) ) = M1m ( x3( m ) )R m −1M m2 ( x3( m ) ) −1. M αm ( x3( m ) ) = A αmΦαm ( x3( m ) ) A αm. [. R m−1 = Z1m − G m−1 (hm−1 ) Zαm = Lmα Aαm. (2.26a). −1. ] [Z −1. m−1. (2.25). (2.27b). (hm−1 ) − Z m2. ]. −1. (2.28) (2.29). 其中,上標m代表厚度hm之介質Lm, x3( m) = x3 − h( m) > 0 , m h( m) = h 1 + ... + hm , L0為基底半無限域材料,G 為介質Lm之阻抗張. 9.
(20) 量,Rm為第m層界面反射係數張量,Z αm 則為第m層介質上下傳聲波的 區域阻抗。 當介質LN之上表面為自由邊界,電性條件電路閉合(short circuit). φ (h( N ) ) = 0 ,即 T (h( N ) ) = 0 。令 x3 = h( N ) ,由(2.23)式可得 G N (hN ) U (h( N ) ) = 0. (2.28). 若存在非零解 U (h) ≠ 0 ,其充分條件為 det(G N ). x3( N ) = h N. =0. (2.29). 倘若介質LN上表面為自由邊界,且電性條件電路開放(open. circuit),即 D3 (h( N ) ) = 0 且 T (h( N ) ) = [0,0,0,φ ] 。由於電位 φ 並未限定, 故波傳阻抗張量中的電位移及電位相關項皆可忽略。考慮(2.23)式, 當 x3 = h( N ) 時,可得 det(G 3N×3 ). x3( N ) = h N. =0. (2.30a). 其中, G 3N×3 為一僅與曳力相關之 3 × 3 矩陣,即. ⎡G11N G12N G13N ⎤ ⎢ N N N⎥ G 3N×3 = ⎢G21 G22 G23 ⎥ N N N⎥ ⎢G31 G32 G33 ⎦ ⎣. (2.30b). 由 (2.30)式,可求得 k 與 ω 的關係,此即為 N 層半無限域表面聲波的 頻散方程式。. 2.1.2 雷利波與拉夫波 2.1.1 小節已經推導出層狀介質表面聲波的相速度,表面聲波除 了雷利表面聲波,尚有橫向偏振的水平橫向表面聲波,亦稱為拉夫 波,故必須加上額外的限制條件藉以區分。 參考圖 2-1,本研究探討的表面聲波波傳方向都落在層狀介質的 10.
(21) 準等向(quasi-isotropic)平面上,雷利波僅包含 stagittal 平面的面內(in-. plane)位移,而無面外方向(out-of-plane)位移,故當波傳方向為. [cosθ , sinθ ,0] 時,其位移向量可重寫如下: U ( x3 ) = [u ( x3 ) cosθ , u ( x3 ) sinθ , u r ( x3 ), iD3 ( x3 )]. T. (2.31). 其中,u ( x3 ) 為平行波向量的縱向位移,ur ( x3 ) 則為垂直波向量的橫向 面內位移。配合 2.1.1 小節的邊界條件,若為自由邊界τ i (h( N ) ) = 0, 且電性邊界條件為閉合 φ (h( N ) ) = 0 時,除式(2.29)外,尚需考慮 x1 向與 x2 向位移分量之比例關係,即. [G '. N 21 cos. N θ − G '11 sin θ. ]. =0. x3( N ) = hN. (2.32a). N N 其中, G '11 、 G ' 21 為 G'3N×1 矩陣的元素, G'3N×1 矩陣為 −1. ⎡G11N G12N G14N ⎤ ⎡G13N ⎤ ⎢ N N N⎥ ⎢ N⎥ G'3N×1 = − ⎢G21 G22 G24 ⎥ ⎢G23 ⎥ N N N N⎥ ⎢G41 G42 G44 ⎥ ⎢G43 ⎦ ⎣ ⎦ ⎣. (2.32b). 當電性邊界條件為開放 D3 (h( N ) ) = 0 時,除式(2.30)外,也需考慮 x1 軸 與 x2 軸向位移分量之比例關係,即 N N N ⎡(G13N G21 − G23 G11 ) cosθ ⎤ ⎢ ⎥ =0 ⎢− (G N G N − G N G N ) sin θ ⎥ ( N ) 12 23 22 13 ⎣ ⎦ x =hN. (2.33). 3. 式(2.32)與(2.33)分別是電性條件為閉合與開放時,N 層半無限域層狀 介質的雷利波頻散方程式。 同理,若為拉夫波波傳,由於只有面外方向的位移,故可將位移 向量條件改寫如下:. U ( x3 ) = [u s ( x3 ) sinθ ,−u s ( x3 ) cosθ ,0, iD3 ( x3 )]. T. (2.34). 其中, u s ( x3 ) 即為面外方向位移。若為自由邊界τ i (h( N ) ) = 0 ,且電性 邊界條件為閉合 φ (h( N ) ) = 0 時,除式(2.29),尚需符合拉夫波的分量之 11.
(22) 比例關係,即 N N N ⎡(G12N G24 G14 ) cosθ ⎤ − G22 ⎢ ⎥ =0 N N N N ⎢+ (G G − G G ) sinθ ⎥ ( N ) 14 21 24 11 ⎣ ⎦ x =hN. (2.35). 3. 當電性邊界條件為開放時,即 D3 (h( N ) ) = 0 時,除(2.30)式外,另外考 慮位移的比例關係,. [G. N 21 sin. N θ + G22 cosθ. ]. x3( N ) = hN. =0. (2.36). 故電性閉合與開放時,N 層半無限域層狀介質的拉夫波頻散方程式分 別為(2.35)與(2.36)式。. 2.1.3 ZnO/Glass 與 Al/ZnO/Glass 表面聲波頻散曲線 在現今的表面聲波元件中,ZnO/Glass層狀結構具有成熟與實用 的地位。氧化鋅為六方堆積(hexagonal)晶系結構(6mm),材料具有單 一對稱軸,並假設該對稱軸與x3方向平行,由於氧化鋅具有高機電耦 合係數與光學係數,因此被廣泛的運用於聲波與光電元件。玻璃為等 向材料,雖然其波傳速度略低,較不適用製作高頻元件,但因其價錢 低廉,且透光度良好,故在中頻元件應用上,仍然具有其優越性。本 節將以ZnO/Glass及Al/ZnO/Glass層狀結構為主要的探討對象,計算表 面聲波相速度頻散曲線,以供日後分析與討論。 參考圖 2-4 所示,考慮層狀材料分別為 ZnO/Glass 與 Al/ZnO/. Glass,由於鋁與玻璃為等向性材料,而氧化鋅的對稱軸垂直基材表 面,故表面聲波的波傳與方向無關。各種材料的性質列於表 2.1~2.3, 此處,剛性係數與壓電常數之下標採用 Voigt 表示法,即下標 ij 或 kl 對應為 p 或 q,其中,11 對應為 1,22 為 2,33 為 3,23 或 32 則為. 4,13 或 31 對應 5,而 12 或 21 則是 6。 考慮層狀半無限域上表面為自由邊界,電性邊界開放狀態,層狀 12.
(23) 介質分別為 0.5 µm 厚的鋁、1 µm 厚的氧化鋅、玻璃基底的厚度為. 1.1mm,可以假設為半無限域。將各參數代入頻散關係,可得 ZnO/Glass 與 Al/ZnO/Glass 的頻散曲線,分別示於圖 2-5 與 2-6,圖中 實線代表雷利波的相速度,虛線為拉夫波頻散曲線。圖 2-7 與 2-8 所 示的表面聲波頻散曲線係氧化鋅厚度為 1.5 µm,其餘材料厚度與圖. 2-5 與 2-6 的情況一致。 雷利波與拉夫波除了第一模態外,其他模態只在較高頻時才存 在,本研究將只討論第一模態的雷利波與拉夫波。. 2.2 頻率響應分析 2.2.1 脈衝函數模型 交指叉換能器的脈衝函數模型(delta function model)是 Tancrell 與. Holland 於 1971 年所提出[12-13],用於估算 IDT 的頻率響應,雖然此 模型做了許多的簡化,但是對於雷利表面聲波元件之初步設計仍有相 當大的幫助。 如圖 2-9 所示,觀測點 x = 0 置於 IDT 的中央,假設電極週期為. d,而第 n 根電極與其鄰近電極產生之脈衝可視為第 n 個波源, An 為 其振幅,正比於電極之間的重疊長度 w , s n 代表電極之極性, t n 是第. n 根電極至觀測點的波程時間,N 為 IDT 之電極數。若 N 為奇數,觀 測點落於中間電極上;若為偶數,則觀測點落於兩電極中間,一般而 言,在初步設計時,兩者並無太大差異。假設 N 根電極可產生 N − 1 個 脈衝,則奇數根電極之整體脈衝響應為 h(t ) =. ( N −1) / 2. ∑. s n An −( N −1) / 2. δ (t − t n ). (2.37). (2.37)式經由傅立葉轉換,可得頻率響應為 13.
(24) H( f ) =. ( N −1) / 2. ∑. s n An e −i 2π ⋅ f ⋅tn. (2.38). −( N −1) / 2. 假設 IDT 的節距固定,電極之間重疊長度 w 亦為定值,若表面聲 波不具頻散特性,則各項參數為 s n = (−1) n. (2.39). d = d e + d b = constant. (2.40a). An = A0 = constant. (2.40b). tn =. nd vR. (2.41). v R = v0 = 2df 0 = constant. (2.42). 其中, v R = v0 即為波傳的相速度, f 0 為設計中心頻率。IDT 的頻率響 應為 H ( f ) = A0. ( N −1) / 2. ∑. e −inπ (1+ f / f0 ). (2.43). −( N −1) / 2. 將上式展開,可發現其虛部為奇函數,恰巧可互相消去,故化簡為 H ( f ) = A0. ( N −1) / 2. ⎛ f ⎞ cos nπ ⎜⎜1 + ⎟⎟ f0 ⎠ ⎝ −( N −1) / 2. ∑. (2.44). 傳統之脈衝模型是針對非頻散波之波傳,若是頻散波傳,則必須 加以修正(Hachigo and Malocha [15]),即波速為工作頻率之函數,則. (2.43)與(2.44)式改寫為. tn =. nd vR ( f ). H ( f ) = A0. (2.45) ( N −1) / 2. ⎛ 2df ⎞ − 1⎟⎟ cos nπ ⎜⎜ ⎝ vR ( f ) ⎠ −( N −1) / 2. ∑. 14. (2.46).
(25) 2.2.2 IDT/ZnO/Glass 頻率響應 交指叉換能器之型式取決於光罩設計,光罩一般以石英玻璃為 基板製作,線寬可達 3~4 µm 之水準。參考表 2-4 所列之交指叉換能 器的設計參數,以 2.1.3 節所獲得之 ZnO(1.5µm)/Glass 的第一模態雷 利波相速度代入(2.46)式,可獲得如圖 2-10 所示之頻率響應圖。在此 一設計參數下,雷利表面聲波元件在 224.91 MHz 有最大之響應,此 時,雷利波相速度為 2,699 m/s,相同頻率之拉夫波波速為 3,125 m/s。. 15.
(26) 第三章 條紋陣列波傳分析 3.1 表面聲波的水平波傳 本文第二章已推導雷利波以及拉夫波的頻散方程式,利用位移關 係及邊界條件,將狀態向量予以簡化,可以求出表面聲波沿著層狀介 質表面波傳的表示式,. ⎤ ⎧C1m ⎫ ⎧U ( x3 )⎫ ⎡ A1m A m2 ⎤ ⎡Φ1m ( x3( m ) ) 0 ⎨ ⎬=⎢ m ⎥⎨ ⎬ m ⎥⎢ T ( x ) 0 Φ m2 ( x3( m ) )⎦ ⎩Cm2 ⎭ 3 ⎭ ⎩ ⎣ L1 L 2 ⎦ ⎣. (3.1). 此處, 0 ≤ x3( m ) ≤ hm , U( x3 ) 與 T ( x3 ) 為狀態向量,未定係數向量 C 可 以表示如下: ⎡C1m ⎤ ⎡ A1m A m2 ⎤ ⎢ m⎥ = ⎢ m m⎥ ⎣C 2 ⎦ ⎣ L1 L 2 ⎦. −1. ⎛ ⎡ A1m A m2 ⎤ m ⎞ ∑ ⎜⎜ ⎢ Lm Lm ⎥ Π ⎟⎟ Κ u m ⎝⎣ 1 2 ⎦ ⎠ N. −1. ⎡Φ1m (hm ) 0 ⎤ ⎡ A1m A m2 ⎤ Π =⎢ ⎥ ⎢ ⎥ Φ m2 (hm )⎦ ⎣ Lm1 Lm2 ⎦ ⎣ 0. (3.2a). −1. m. (3.2b). 其中, u 為物體表面位移的振幅, K 為層狀介質表面的狀態向量,此 一部份的推導詳見於附錄 C。 當波傳為雷利波時, K 可表示為. Κ = [a0 cosθ a0 sinθ 1 a1 0 0 0 a2 ]. T. (3.3). 若電性邊界條件為開放 D3 (h( N ) ) = 0 時,可得 N N N N ⎡ G23 ⎤ G31 − G21 G33 csc θ a0 = ⎢ N N , θ ≠ nπ ⎥ N N − G G G G N ( ) 22 31 ⎣ 21 32 ⎦ x3 =hN. (3.4a). N N N ⎡ G12N G23 ⎤ G13 − G22 sec θ a0 = ⎢ N N , θ ≠ (n − 0.5)π ⎥ N N ⎣ G11 G22 − G21G12 ⎦ x3( N ) =hN. (3.4b). a1 = 0. (3.4c). 16.
(27) [. N N N a 2 = a0 (G 41 cosθ + G42 sin θ ) + G43. ]. (3.4d). x3( N ) = hN. 當電性邊界條件為閉合 φ (h( N ) ) = 0 時,則. [ = [G '. ] secθ ]. N a0 = G '21 cscθ. a0. N 11. x3( N ) = hN. x3( N ) = hN. ,. θ ≠ nπ. (3.5a). ,. θ ≠ (n − 0.5)π. (3.5b). N a1 = (G '31 ) x( N ) =h 3. (3.5c). N. [. N N N N a 2 = a0 (G 41 cosθ + G42 sin θ ) + G43 + a1G44. ]. x3( N ) = hN. (3.5d). 其中, G' N 定義於(2.32b)式。 同理,當波傳為拉夫波時,層狀介質表面的狀態向量可表示為. Κ = [sinθ − cosθ 0 b0 0 0 0 b1 ]. T. (3.6). 若電性邊界條件為開放 D3 (h( N ) ) = 0 時,則. b0 = 0. [. N N b1 = G41 sin θ − G42 cosθ. (3.7a). ]. (3.7b). x3( N ) = hN. 當電性邊界條件為閉合 φ (h( N ) ) = 0 時,則 N N N ⎛ G11N G42 ⎞ G12 − G41 ⎟⎟ sin θ b0 = ⎜⎜ N N , θ ≠ nπ N N G G G G − N ( ) 42 14 ⎝ 12 44 ⎠ x3 =hN. (3.8a). N N N N ⎛ G21 ⎞ G44 − G41 G24 ⎜ ⎟⎟ cos θ b0 = ⎜ N N , θ ≠ (n − 0.5)π N N − G G G G 42 14 ⎝ 12 44 ⎠ x3( N ) =hN. (3.8a). (. N N N b1 = G41 sin θ − G42 cosθ + b0 G44. ). x3( N ) = hN. (3.8b). 3.2 條紋陣列的反射與透射 沿著物體表面行進的表面聲波傳遞路徑上,如果介質的形狀或材 料變化,將會產生反射與透射波傳。本研究針對條紋陣列所產生的介 質改變,推導條紋陣列結構表面聲波的反射與透射率。以往大多數學 17.
(28) 者直接採用表面聲波反射係數與透射係數為未知數,本研究改以表面 聲波狀態向量為未知數,利用條紋陣列兩側的的波傳連續條件求解, 計算狀態向量對應分量的比值,求得反射率與透射率。 考慮一波傳方向為 N R 之雷利波 U R (0) ,經過如圖 3-1 與 3-2 所示 之條紋陣列。圖 3-1 所示的 LU 為表層介質, LU +1 為條紋陣列層。圖. 3-2 所示的 U Η 為反射與透射波傳,令 N Η 為波傳方向,下標 Η = A ~ D 與 P ~ S ,分別代表無條紋與有條紋區域之波傳;其中 R, S , A, B 為雷 利波, P, Q, C , D 則為拉夫波, d a 與 d b 分別代表條紋的寬度與間距。 若條紋陣列上表面(即 x3 方向)的電性邊界條件為開放,由上一小 節的推導可求得. ⎧U Η (x, x3 )e −iωt ⎫ i ( k N ⋅x −ωt ) ⎨ ⎬ = U Η ( x3 ) e Η Η −iωt ⎩ D3Η e ⎭. (3.9). ⎧Η 3×1 ( x2 , x3 )⎫ i ( k cosθ x −ωt ) =⎨ ⎬ uΗ e Η Η 1 0 ⎭ ⎩ (Η ) σ 23 (x, x3 )e −iωt = τ 2Η ( x3 ) e i ( kΗ NΗ x−ωt ). = τ 2Η ( x2 , x3 ) uΗ e. i ( kΗ cosθ Η x1 −ωt ). (3.10). 此處,若向量 Η =A、B、R、S,代表雷利波的位移向量,若 Η =C、 D、P、Q,則代表拉夫波的位移向量。若考慮頻散現象,波數 k Η =. ω / vΗ ,其中,波速 vΗ = vΗ (ω ) 為頻率之函數。 當時諧表面聲波經過陣列條紋時,層狀介質上表面以下( x3 ≤ h(U ) ) 的波傳位移連續,通過第 n 根條紋前、後邊緣的位移向量為. ∑ (U Η (n−1) (x n−1 , x3 )) = ∑ (U Η (n) (x n−1 , x3 )). (3.11a). ∑ (U Η(n) (x n , x3 )) = ∑ (U Η(n) (x n , x3 )). (3.11b). Η = R , S , P ,Q. Η = A, B ,C , D. Η = A, B ,C , D. Η = R ,S , P ,Q. 其中,位置向量 x n−1 = [ x1 , ( n − 1)(d a + d b )] 、 x n = [ x1 , n( d a + d b ) − d b ] 。 18.
(29) 除了位移連續外, x2 方向的應力分量 ∑σ 2i( Η) 亦為連續,在條紋 陣列表面以下的區域( x3 ≤ h(U ) ),. ∑ (σ. Η ( n −1) 23. (x n−1 , x3 ) ) =. Η = R , S , P ,Q. ∑ (σ. Η (n) 23. (x n−1 , x3 ) ). Η = A, B ,C , D. ∑ (σ 23Η(n) (x n , x3 )) = ∑ (σ 23Η(n) (x n , x3 )). Η = A, B ,C , D. (3.12a) (3.12b). Η = R ,S , P ,Q. 若所考慮的表面聲波為平面波,且陣列條紋在 x1 方向為無限長, 因為波傳的連續條件不受x1方向的參數影響,故可將x1方向的波傳因 子提出,獲得一恆等式, e ikΗ x1 cosθ Η = e k R x1 cosθ R. (3.13). 因為x1座標為任意值,反射與透射波的 x1 方向波數恆等, k Η cosθ Η = k R cosθ R. (3.14a). 此即所謂的司聶耳定律(Snell’s Law) k Η sin Θ Η = k R sin Θ R. (3.14b). 其中, Θ R = π / 2 − θ R 代表了入射角, Θ Η = π / 2 − θ Η 則為各表面聲波 波式轉換(mode-converted)的反射與透射角。 當波傳經過第 n 根條紋後,其位移變化表示如下:. u ( n ) = M ( n ) u ( n−1). (3.15). 其中,u ( n ) 為通過第 n 根條紋之位移狀態向量, M ( n ) 為一 4 × 4 之波傳 矩陣(propagating matrix),分別表示如下 u ( n ) = [u R ( n ) u S ( n ) u P ( n ) uQ ( n ) ]. (3.16). M ( n ) ( x3 ) = [M 1−1M 2 ] x2 = x2 ( n ) [M 2−1M 1 ] x2 = x2 ( n −1). (3.17). ⎡R 3×1 S 3×1 P3×1 Q 3×1 ⎤ M 1 ( x 2 , x3 ) = ⎢ ⎥ ⎣ τ 2 R τ 2 S τ 2 P τ 2Q ⎦. (3.18a). ⎡ A 3×1 B 3×1 C3×1 D3×1 ⎤ M 2 ( x2 , x3 ) = ⎢ ⎥ ⎣ τ 2 A τ 2 B τ 2C τ 2 D ⎦. (3.18b). T. 19.
(30) 此處, x2( n−1) = (n − 1)(d a + d b ) 、 x2( n ) = n(d a + d b ) − d b 。當雷利 波垂直入射(即 Θ R = 0 )條紋時,反射與透射波都只剩下雷利波,拉夫 波將不復存在,故(3.15)式可退化如下: ⎧u R ( n−1) ⎫ ⎧u R ( n ) ⎫ ⎬ ⎨ ⎬ = M (n) ⎨ ⎩u S ( n−1) ⎭ ⎩u S ( n ) ⎭. (3.19). 其中, M (n ) 為一 2 × 2 之波傳矩陣, M ( n ) ( x3 ) = [ M1−1M 2 ] x2 = x2 ( n ) [ M 2−1M1 ] x2 = x2 ( n −1). (3.20). ⎡ R2 S 2 ⎤ M1 ( x2 , x3 ) = ⎢ ⎥ ⎣ R3 S 3 ⎦. (3.21a). ⎡ A2 B2 ⎤ M 2 ( x2 , x3 ) = ⎢ ⎥ ⎣ A3 B3 ⎦. (3.21b). 這裡 Ri , S i , Ai , Bi 分別為 R 3×1 , S 3×1 , A 3×1 , B 3×1 的元素。 將以上推導擴展至 N 根陣列條紋,則可得全域表面聲波的狀態 式 1. ∑ (M ( n ) ) u ( 0 ) ,. ΘR > 0. (3.22). ⎧u R ( 0) ⎫ ⎧u R ( N ) ⎫ 1 ( M ) = ⎬, ⎨ ⎬ ∑ (n) ⎨ u u S N ( ) S ( 0 ) n N = ⎩ ⎭ ⎩ ⎭. ΘR = 0. (3.23). u(N ) =. n= N. 計算反射與透射場的位移 u S ( 0) 、 u R (0) 與入射雷利波位移 u R ( 0) 的比值, 可求得雷利波通過陣列條紋的反射與透射率,雷利波的透射與反射率 定義如下 Trr =. Rrr =. u R( N ). 2. (3.24). u R ( 0) u S (0). 2. (3.25). u R ( 0). 參考第二章的推導,以數值程式計算雷利波與拉夫波的相速度頻 20.
(31) 散曲線,圖 2-7 與圖 2-8 分別為 ZnO (1.5 µm )/Glass 與 Al ( 0.5 µm )/ZnO. (1.5 µm )/Glass 層狀介質表面聲波相速度頻散曲線。當雷利波斜向入 射時,根據本節的推導,可計算出反射、透射率的頻譜變化。雷利波 通過單一金屬條紋時,依據層狀介質上表面的位移分別計算反射、透 射率,圖 3-3 至 3-6 所示分別為不同條紋寬與入射角對應的反射與透 射頻譜圖。. 21.
(32) 第四章 結果與分析 本研究依據第三章的推導,撰寫數值程式,計算不同條紋陣列及 設計參數對於雷利波反射與透射頻譜的影響。本章討論各設計參數的 影響,以期做為未來元件設計之參考。. 4.1 條紋陣列的頻率響應分析 本節以 Al/ZnO/Glass 陣列條紋結構為例,考慮不同的條紋寬度、 數量、高度與入射角,各項計算都納入表面聲波相速度的頻散行為, 討論陣列條紋對於反射、透射率的影響。所採用的設計參數列於表 4-1a 至 4-1c。第 4.1.1 至 4.1.3 小節探討條紋寬度與間距寬度一致,各 設計參數之於頻譜的定量變化;第 4.1.4 小節則探討條紋寬度與間距 不等之定性與定量變化。. 4.1.1 條紋寬度與入射角度 為了分析上的需要,在此將反射與透射頻譜的頻率軸予以無因次 化,參考圖 4-1 所示,橫軸座標改為 k A d a cos Θ A / 2π ,其中,k A cos Θ A 為頻散時,表面聲波波數在 x2 方向的分量。下標 A 代表在陣列條紋 中傳遞之雷利波。 首先考慮固定條紋數且條紋寬與間距等距的計算例,圖 4-2 至. 4-5 所示為條紋數 N=5, d a = d b = 3 、 30 µm ,入射角 Θ R = 0° 、 45° 之 頻譜圖。從圖中顯示,條紋寬度或入射角不同時,反射與透射率的大 小不相同,但在橫座標 k A d a cos Θ A / 2π = 0.5n + 0.25 (n ∈ N , n ≥ 0) 處, 都具有局部最大(峰值)反射率,以及局部最小(谷值)透射率,此點對 應之頻率稱為極值頻率。 表面聲波在條紋區與非條紋區之相速度不相同,當表面聲波從波 22.
(33) 速較慢介質傳遞至波速較快之介質時,在界面產生的反射波相位會延 遲二分之一週期,因此極值頻率代表產生建設性或破壞性干涉的波傳 頻率。參考圖 4-6,圖中(1)與(2)代表不同介質,介質寬度分別為 d1 與. d 2,U 為入射時諧波,U r (i ) 代表通過第i界面的一次(或奇數次)反射波 波傳, Θ1 與 Θ 2 為表面聲波在介質(1)與(2)的反射角, k1 與 k 2 為其波 數。若介質(2)的波速較(1)為慢,將x1方向波傳因子提出,則. U r (1) = A1 exp(iε 0 ). (4.1a). U r ( 2) = A 2 exp(i 2k 2 d 2 cos Θ 2 + iε 0 − iπ ). (4.1b). U r (3) = A 3 exp(i 2k 2 d 2 cos Θ 2 + i 2k1d1 cos Θ1 + iε 0 ). (4.1c). k1 = 2π / λ1 , k 2 = 2π / λ2 其中, A i 與 λi 對應第 i 界面之反射波振幅的分量以及波長, ε 0 為初 始相位。若各反射波彼此互為建設性波傳時,其位移 U r (i ) 必定具有相 同之相位,故. 2k 2 d 2 cos Θ 2 + ε 0 − π = 2mπ + ε 0. (4.2a). 2k 2 d 2 cos Θ 2 + 2k1d1 cos Θ1 + ε 0 = 2mπ + ε 0. (4.2b). 2k 2 d 2 cos Θ 2 + 2k1d1 cos Θ1 + ε 0 = 2mπ + 2k 2 d 2 cos Θ 2 + ε 0 − π. (4.2c). 若 k1d1 cos Θ1 ≈ k 2 d 2 cos Θ 2 ,當條紋寬度與波長在x2方向分量的比值為. 0.25 的奇數倍時,反射波才有明顯的建設性干涉出現。對於條紋陣列 的透射波而言,波傳反射次數為偶數次,其相位延遲恰好為整數週 期,因此無建設性干涉作用。當條紋寬與波長在x2方向分量的比值為. 0.25 的奇數倍時,才會產生破壞性干涉。. 4.1.2 條紋數量的改變 圖 4-2 至 4-5 為陣列條紋數 N = 5 的頻譜,圖 4-7 至 4-10 為陣列 23.
(34) 條紋數 N = 20 時的反射與透射頻譜。兩者比較可知,若條紋寬、間 距與入射角相同,隨著條紋數增加,相同頻率下之透射率會變小,反 射率則隨之增大,條紋增加使得反射率增加。 隨著陣列條紋數目之增加,表面聲波的波傳受條紋陣列邊界之影 響也更為明顯,條紋寬與間距所產生的建設或破壞性干涉影響更為顯 著。當條紋數目增加時,反射率極值的頻寬會更為狹小,而以. k 2( A) d a / 2π = 0.5n + 0.25 為極值頻率。. 4.1.3 條紋的高度變化 圖 4-11 為鋁薄膜厚度 0.5 與 1 µm 之 Al/ZnO (1 µm)/Glass 層狀介 質的第一模態雷利與拉夫波頻散曲線,圖 4-12 為覆蓋 0.5 與1 µm 厚度 的鋁薄膜與未覆蓋之 ZnO (1 µm)/Glass 層狀半無限域介質的第一模態 雷利波波速比值。當工作頻率很低時,層狀介質表面聲波相速度值趨 於基材的表面聲波波速,無視於基材的鍍層介質變化。隨著工作頻率 增加,鍍層介質逐漸影響雷利波的波速或香對比值。 圖 4-13 和 4-14 為表面聲波以 Θ R = 45° 、 0° 入射於1 µm 高的鋁條 紋陣列之反射、透射頻譜,與圖 4-9 與 4-10 所示之 0.5 µm 高鋁條紋陣 列的頻譜比較,倘若條紋的高度增加,除了反射現象更為明顯外,極 值頻率的頻寬也會更寬,這是因為表面聲波相速度在條紋區與非條紋 區之差異更為明顯,使得極值頻率不再只侷限於 k A d a cos Θ A / 2π =. 0.5n + 0.25 。. 4.1.4 條紋寬度與間距不相等 當條紋寬度與間距有顯著不同時,將會使得反射與透射率的極值 頻率偏移,偏移依據條紋或間距較寬之介質的雷利波對應的無因次化 24.
(35) 座標而定。以固定 20 根條紋為例,如圖 4-15 至 4-20 所示,圖中反射 率頻譜以 k A d a cos Θ A / 2π 為其橫軸,透射率頻譜則以 k R d b cos Θ R / 2π 為座標尺度,其中,k R cos Θ R 為鋁條紋間距中傳遞之雷利波波數的 x2 方向分量,而 d b 為條紋間距寬度。紋寬度遠大於間距時,極值頻率將 趨近於 k A d a cos Θ A / 2π = 0.5n 。反之,當條紋寬度遠小於間距時,其 極值頻率將趨近於 k R d b cos Θ R / 2π = 0.5n 。由式(4.2b)可知,若 d 2 << d1 ,即 k 2 d 2 cos Θ 2 與相位延遲可忽略時,反射波傳的建設性干 涉將發生在 k1d1 cos Θ1 / 2π = 0.5n ,符合此一極值頻率偏移現象。. 4.2 初始條件對頻率響應的影響 本文在 4.1 節中,曾討論條紋陣列幾何性質之改變對頻率響應的 影響。若初始條件改變,例如入射角度或基底材質的改變,亦會影響 表面聲波反射與透射率的頻率響應,本節將予以探討。. 4.2.1 頻散效應與反射率 本文先前已經證明,當 k1d1 cos Θ1 ≈ k 2 d 2 cos Θ 2 時,反射與透射 率的極值頻率將趨近於 ki d i cos Θi / 2π = 0.5n + 0.25 。當 k1d1 cos Θ1 與 k2 d 2 cos Θ 2 有著顯著差異時,極值頻率將偏向 ki d i cos Θ i / 2π = 0.5n , 其中,i 為比值較大者。 由於頻散的影響,雷利波於條紋及非條紋區傳遞時,其波數比值 將隨頻率而改變。現以雷利波 45° 斜向入射一組條紋寬 30 µm 、根數 為 20 的週期性條紋陣列為例,圖 4-21 是 ZnO (1.5 µm ) /Glass 結構以 及 Al ( 0.5 µm )/ZnO (1.5 µm )/Glass 結構的第一模態雷利波頻散曲線, 圖 4-22 為無條紋與有條紋兩者波數在 x2 方向分量的比值曲線,圖 4-23 則是其反射率頻譜圖。比較圖 4-22 與 4-23 可以發現,當條紋寬與間 25.
(36) 距相等,而波數略有不同時,其反射率之峰值除了發生於原本的 k A d a cos Θ A / 2π ≈ 0.5n + 0.25 處之外,於 k A d a cos Θ A / 2π ≈ 0.5n 處亦可 發現,但峰值相對於前者則較為不明顯。. 4.2.2 斜向入射與垂直入射 當雷利波為斜向入射時,在條紋與非條紋界面會發生波式轉換. (mode conversion),產生拉夫波,因此在圖 4-4、4-9 等圖中,透射率 的極值頻率並不只出現於 k A d a cos Θ A / 2π = 0.5n + 0.25 (n ∈ N , n ≥ 0) 處。雷利波垂直入射時,因為無拉夫波存在,則無此一現象。 以圖 4-9 為例,透射頻譜圖的橫座標軸改為 kC d a cos Θ C / 2π ,在 接近 0.5n + 0.25 (n ∈ N , n ≥ 0) 時,亦有谷值出現,其中, kC cos Θ C 為 條紋中拉夫波的 x2 方向波數。. 4.2.3 反射率的全域凹陷現象 假設雷利波入射一 Al/ZnO/Glass 層狀介質的鋁質條紋陣列,圖. 4-24 至 4-30 所示為不同設計參數所得到的反射率響應,各項設計參 數列於表 4-1c,圖中為了增進較小數值的分辨,將反射率改為 dB。 圖 4-24 至 4-26 除了氧化鋅鍍層厚度改變外,入射角度與條紋陣列均 相同。圖 4-26 至 4-28 所示為改變條紋陣列數量或寬度,但鋁條紋與 氧化鋅厚度均為 0.5 與1µm 的模擬結果;圖 4-28 至 4-30 所示結果為 入射角不同,其餘參數皆相同。 以上各模擬結果顯示,儘管不同的設計參數使得反射率的數值與 極值頻率均不相同,但在無因次化座標 k A d a cos Θ A / 2π ≈ 0.5n 處,反 射波傳皆為破壞性干涉,此一結果與 4.1 節的分析一致。 在圖 4-24 的 560MHz、圖 4-25 的 350MHz 與圖 4-26 至 4-28 的. 26.
(37) 407MHz 附近,可發現反射率的全域凹陷現象。圖 4-24 至 4-26 除了 凹陷處的頻率不同外,層狀介質表面聲波相速度頻散曲線亦不同,代 表了材質特性的不同。圖 4-26 至 4-28 的層狀介質具有相同的頻散曲 線,全域凹陷發生於相同的頻率。如圖 4-28 至 4-30 所示,當入射角 改變時,也會改變凹陷處的頻率,當入射角越小時,全域凹陷處的頻 率也越趨於高頻。故反射率的全域凹陷現象所對應的頻率,只與介質 本身的材質、表面聲波相速度與波傳方向有關,與條紋陣列的寬度、 間距及數目等形狀因子無關。. 27.
(38) 第五章 結論與展望 5.1 結論 本文利用八階壓電波動方程式求得層狀介質表面聲波相速度頻 散曲線及各介質的狀態向量,考慮條紋陣列間的波傳連續條件,推導 表面聲波於表面條紋間波傳的反射、透射率。並以數值程式,模擬金 屬條紋陣列各項設計參數對反射與透射率之影響。 表面聲波在條紋陣列的波傳受到金屬條紋以及基材的不同而改 變,其中以金屬條紋的形狀因子影響最大,經模擬分析,得到以下結 論: (1)當金屬陣列條紋寬度與間距相同,若表面聲波於條紋與非條紋區相 速度差異不大,反射率峰值發生於無因次化座標 k A d a cos Θ A / 2π. = 0.5n + 0.25 時。 (2)陣列條紋數目的增加將提高表面聲波的反射率,極值頻率之頻寬會 隨著條紋增加而愈益窄化。. (3)陣列條紋高度增加時,除了加強反射率,亦使得條紋區與非條紋區 表面聲波相速度之差異變大,以致極值頻率之頻寬增加。. (4)當條紋間距與寬度的差異性或波速於條紋與非條紋區的不同造成 k A d a cos Θ A 與 k R db cos Θ R 的差異增大時,將使得反射率之極值頻率 移動,趨於 kd cos Θ 比值較大者的無因次化座標為 0.5n 處。. (5)金屬陣列條紋的形狀因子的影響,反射率頻譜具有全域凹陷現象, 凹陷處的頻率只與介質本身的材質、表面聲波相速度及波傳方向有 關,與條紋陣列的寬度、間距及數目等形狀因子無關。. 28.
(39) 5.2 未來展望 本研究可作為未來表面聲波濾波器設計的參考,不但能定量的模 擬表面聲波於條紋陣列的波傳性質,更能透過調整條紋陣列或入射訊 號的角度,改變反射與透射訊號的行徑方向。使得表面聲波濾波器除 了擷取或阻擋特定頻率範圍的訊號外,還能有更多樣化的設計。 本研究目前已成功的推導並模擬了條紋陣列的波傳性質,在未 來,除了與表面聲波元件實際量測數據做比較外,還可將此一理論擴 展至換能器的模擬,考慮波傳能量的衰減,使得表面聲波元件的模擬 更為完整。. 29.
(40) 參考文獻 [1] Lord Rayleigh (1885), “On waves propagated along the plane surface of an elastic solid,” Proc. London Math. Soc., 17, 4. [2] R.M. White and F.W. Voltmer (1965), “Direct piezoelectric coupling to surface elastic waves,” Appl. Phys. Lett, 7(December 15), 314-316. [3] J.L. Bleustein (1968), “A new surface wave in piezoelectric materials,” Appl. Phys. Lett., 13, 412. [4] Y.V. Gulyaer (1969), “Electro acoustic surface waves in solids,” JETP Letters, 9, 37-38. [5] G.S.Kino and R.S. Wagers (1973), “Theory of interdigital couplers on nonpiezoelectric substrates,” J. Appl. Phys., 44(4), 1480-1488. [6] Y. Shimizu and A. Terazaki (1977), “Unidirectional surface acoustic wave transducers of ZnO on glass,” Electronics Letters, 13, 13, 384. [7] A.M.B. Braga and G. Herrmann (1988), “Plane waves in anisotropic layered composites,” in Symposium on Wave Propagation in Structural Composites, A.K. Mal and T.C.T Ting, eds., ASME-AMD -Vol. 90, 89-98. [8] D. Royer and E. Dieulesaint (1999), Elastic Waves in Solids, vol. I, 119-166, Springer-Verlag, Berlin. [9] A.N. Stroh (1962), “Steady state problem in anisotropic elasticity,” J. Math. and Phys., 41, 77-102. [10] G. Honein, A.M.B. Braga, P. Barbone, and G. Herrmann (1991), “Wave propagation in piezoelectric layered media with some applications,” J. Intelligent Material Systems and Structure, 2(4), 542-557. [11] D.M. Barnett and J. Lothe (1985), “Free surface (Rayleigh) waves in anisotropic elastic halfs-paces: the surface impedance method”, 30.
(41) Proceedings of the Rayal Society, Londan: A, 402, 135-152. [12] R.V. Schmidt and F.W. Voltmer (1969), “Piezoelectric elastic surface waves in anisotropic layered media,” Microwave Theory and Techniques, IEEE Transactions on, 17(11), 920-926. [13] R. H. Tancrell and M. G. Holland (1971), “Acoustic surface wave filters,” IEEE Proc., 59, 393-409. [14] D. Royer and E. Dieulesaint (1999), Elastic Waves in Solids, vol. II, 70-72, Springer-Verlag, Berlin. [15] A. Hachigo and D.C. Malocha (1998), “SAW device modeling including velocity disperion based on ZnO/diamond/Si layered structures,” IEEE Trans. Ultrason, Ferroelect., Freq. Contr., 45(3), 660-665. [16] J.R. Pierce (1954), “Coupling of modes of propagation,” J. Appl. Phys., 25(1), 179-83. [17] P.S. Cross and R.V. Schmidt (1977), “Coupled surface-acousticwave resonators,” Bell System Tech. Journal, 56, 1447-1482. [18] B.P. Abbott (1989), “A coupling-of-modes model for SAW transducers with arbitrary reflectivity weighting,” Ph.D. Thesis, Department of Electrical Engineering, University of Central Florida, Orlando, Florida, USA. [19] B.P. Abbott, C.S. Hartmann and D.C. Malocha (1989), “A couplingof-modes analysis of chirped transducers containing reflective electrode geometries,” IEEE Ultrason. Symp., 129-134. [20] 羅世青(2004),表面聲波微步進馬達的特性量測,交通大學機械 工程學系碩士論文。 [21] 王偉姍(2003),ZnO/Sapphire 層狀表面聲波元件之分析、製作與. 量測,台灣大學應用力學研究所碩士論文。. 31.
(42) 附錄 A 八階材料性質矩陣分量 Γ 為一 8 × 8 之材料性質矩陣: ⎡ Γ11 ⎢Γ 21 Γ=⎢ ⎢ Γ 31 ⎢ ⎣Γ 41. Γ12 Γ13 Γ14 ⎤ Γ 22 Γ 23 Γ 24 ⎥ ⎥ Γ 32 Γ 33 Γ 34 ⎥ ⎥ Γ 42 Γ 43 Γ 44 ⎦. 其各分量如下: Γ11 = −Q*(m 3 ) −1 R*(m 3 , m α )∂ α. Γ12 = −iQ*(m 3 ) −1. S(m 3 ). ε 33. Γ13 = −iQ*(m 3 ) −1 Γ14 = −Q*(m 3 ) −1 P*(m 3 , m α )∂ α. ⎡P*(m β , m α ) ⎤ ⎥∂ α ∂ β Γ 21 = −i ⎢ ⎢− P*(m 3 , m α ) Q*(m 3 ) −1 R*(m 3 , m β )⎥ ⎣ ⎦. Γ 22 =. [. ]. −1 P*(m 3 , m α ) Q*(m 3 ) −1 S(m 3 ) + ε 3α ∂ α ε33. Γ 23 = − P*(m 3 , m α ) Q*(m 3 ) −1 ∂ α. Γ 24. ⎡P*(m 3 , m α ) Q*(m 3 ) −1 P*(m 3 , m β )⎤ ⎥ ⎢ = i⎢ ⎥∂ α ∂ β ε 3α ε 3 β ⎥ ⎢+ ε αβ − ε 33 ⎥⎦ ⎢⎣. T −1 ⎧ ⎫ ⎤ ⎡ ⎪ ∂ 2 ⎢R*(m 3 , mα ) Q*(m 3 ) R*(m 3 , m β )⎥ ⎪ ∂α ∂ β ⎬ Γ 31 = i ⎨ ρ 2 + ⎥ ⎢− R*(m α , m β ) ⎪⎩ ∂t ⎪⎭ ⎦ ⎣. Γ 32 =. 1. ε 33. [P(m. α ,m3 ). ]. − R*(m 3 , mα ) T Q*(m 3 ) −1 S(m 3 ) ∂ α. Γ 33 = − R*(m α , m 3 )Q*(m 3 ) −1 ∂ α 32.
(43) Γ 34. ⎡P*(m α , m β ) ⎤ ⎥∂ α ∂ β = −i ⎢ ⎢− R*(m α , m 3 ) Q*(m 3 ) −1 P*(m β , m 3 )⎥ ⎣ ⎦. Γ 41 = Γ 42 =. 1. ε 33. [P(m. ]. − S(m 3 )Q*(m 3 ) −1 R*(m 3 , m α ) ∂ α. S(m 3 ) ⎤ −i ⎡ S(m 3 )Q*(m 3 ) −1 − 1⎥ ⎢ ε 33 ⎣ ε 33 ⎦. Γ 43 = −iS(m 3 ). Γ 44 =. α ,m3 ). −1. ε 33. Q*(m 3 ) −1. ε 33. [S(m ) Q*(m ) 3. 3. −1. ]. P*(m α , m 3 ) + ε 3α ∂ α. 其中張量 Q(n)、 R (a, b) 與 R*(a, b) ,向量 S(n)、 P (a, b) 與 P*(a, b) 定義 如下:. R (a, b) ~ Cijkl bl a j P(a, b) ~ bk ekij a j R*(a, b) = R (a, b) + P*(a, b) = P(a, b) −. P(a, m 3 ) ⊗ P(b, m 3 ). ε 33 P(a, m 3 )ε 3b. ε 33. Q*(n) = R*(n, n) S(n) = P(n, n) 此處,下標 i, j , k , l = 1..3 , α , β = 1..2 。. 33.
(44) 附錄 B 波傳阻抗與反射係數 已知 0 ⎤ ⎧ C1 ⎫ ⎧U ( x3 )⎫ ⎡ A1 A 2 ⎤ ⎡Φ1 ( x3 ) ⎨ ⎬ ⎨ ⎬=⎢ ⎥ ⎢ Φ 2 ( x3 )⎥⎦ ⎩C2 ⎭ ⎩ T ( x3 ) ⎭ ⎣ L1 L 2 ⎦ ⎣ 0. (B-1). 其中,C1與C2為向量常數,而 U( x3 ) 和 T ( x3 ) 則是狀態向量,. U ( x3 ) = [u1 ( x3 ), u 2 ( x3 ), u3 ( x3 ), iD3 ( x3 )]. (B-2a). T ( x3 ) = [iτ 1 ( x3 ), iτ 2 ( x3 ), iτ 3 ( x3 ),φ ( x3 )]. (B-2b). T T. 定義區域阻抗(local impedance) Z α 為單一上和下傳波之曳力與位移 之比值, Z α A α Φ α Cα = L α Φ α Cα. (B-3). 或化簡為 Zα = Lα Aα. −1. (B-4). 定義反射係數張量R0為介面x3 = 0 處上傳波與下傳波位移之比值, A1C1 = R 0 A 2C 2. (B-5). 將(B-3)(B-4)代回(B-1)式即可得 U( x3 ) 和 T ( x3 ) 之關係,. T ( x3 ) = G ( x3 ) U ( x3 ). (B-6). G( x3 ) = [Z1 H( x3 ) + Z 2 ][H( x3 ) + I ]. (B-7). H ( x3 ) = M1 ( x3 )R 0M 2−1 ( x3 ). (B-8a). M α ( x3 ) = A α Φ α ( x3 )A α−1. (B-8b). −1. 其中, G ( x3 ) 即為波傳阻抗張量(impedance tensor)。 若推展至圖 2.2 所示之單層半無限域材料,此處的上標代表介質 之編號,在基底介質 A 中,因底部為半無限域無上傳波存在,即 A1AΦ1A = 0 ,故可得下式: G A = Z 2A. (B-9) 34.
(45) 在表層介質B中,假設與A之交界x3 = 0 處存在反射係數張量R0, 可由(B-7)式得到介質B之波傳阻抗, −1 −1 G ( x3 ) = ⎡Z1B M1B R 0 M 2B + Z 2B ⎤ ⎡M1B R 0 M 2B + I ⎤ ⎢⎣ ⎥⎦ ⎢⎣ ⎥⎦ B. −1. (B-10). A與B介質在x3 = 0 處相交接,必須滿足邊界連續之條件,即 T A (0 + ) = T B (0 − ) 、 U A (0 + ) = U B (0 − ) ,將(B-9)與(B-10)代回(B-6)式,. 可知 G A ( 0 + ) = G B ( 0 − ) ,故經整理可得,. [. R 0 = Z1B − Z 2A. ] [Z −1. A 2. − Z 2B. ]. (B-11). 同理,若推展至N層半無限域材料,如圖 2-3 所示,Lm代表各層 之編號, x3( m ) = x3 − (h 1 + ... + hm ) > 0 ,則經由疊代可得各層之波傳阻 抗及反射係數張量, T ( x3 ) = G m ( x3( m ) ) U ( x3 ). (B-12). G 0 = Z 02. (B-13). [. ][. G m ( x3( m ) ) = Z1m H m ( x3( m ) ) + Z 2m H m ( x3( m ) ) + I H m ( x3( m ) ) = M1m ( x3( m ) ) R m −1M m2 ( x3( m ) ) −1. M αm ( x3( m ) ) = A αmΦαm ( x3( m ) ) A αm. [. R m−1 = Z1m − G m−1 (hm−1 ). −1. m−1. −1. (B-14) (B-15a). −1. ] [Z. ]. (B-15b). (hm−1 ) − Z m2. ]. (B-16). 對於一N層半無限域材料而言,其所需之波傳阻抗、區域阻抗、以及 界面上之反射係數均已求得,除了表層介質之波傳阻抗張量與x3坐標 有關,其餘皆為和x3坐標無關之材料性質。. 35.
(46) 附錄 C 表面聲波波傳方程式 考慮雷利波在層狀介質的準等向平面之問題,令 a0 代表雷利波 位移的縱向分量與x3方向(鉛垂)分量u之比值, a1 為表面電位移與x3方 向之位移分量比值, a2 則為表面電位與x3方向位移分量的比值。表面 位移與電位移構成的狀態向量可以表示成. U (hN ) = [a0u cosθ , a0u sinθ , u, a1u ]. T. (C-1). 若電性邊界條件為開放 D3 (h( N ) ) = 0 ,即 a1 = 0 時,由頻散關係 (2.33)式可得振幅比為 N N N N ⎡ G23 ⎤ G31 − G21 G33 cscθ ⎥ a0 = ⎢ N N , θ ≠ nπ N N − G G G G N ( ) 22 31 ⎣ 21 32 ⎦ x3 =hN. (C-2a). N N N ⎡ G12N G23 ⎤ G13 − G22 sec θ a0 = ⎢ N N , θ ≠ (n − 0.5)π ⎥ N N G G G G − N ( ) 21 12 ⎣ 11 22 ⎦ x3 =hN. (C-2b). 若層狀介質表面為自由邊界τ i (h( N ) ) = 0 ,由(2.22)式的阻抗關 係,可求出電位與位移之比值,. φ (h( N ) ) = a2u. (C-3a). [. N N N a 2 = a0 (G 41 cosθ + G42 sin θ ) + G43. ]. (C-3b). x3( N ) = hN. 將位移與邊界關係代回(2.20)式,可獲得特定係數向量, −1. −1. ⎡C1N ⎤ ⎡Φ1N (hN ) 0 ⎤ ⎡ A1N A 2N ⎤ Κu ⎢ N⎥=⎢ ⎥ ⎢ N N N ⎥ ( ) C 0 Φ h L L 2 2 ⎦ N ⎦ ⎣ 1 ⎣ 2⎦ ⎣. (C-4). Κ = [a0 cosθ a0 sinθ 1 0 0 0 0 a2 ]. (C-5). 其中, T. 經由疊代,可得層狀介質中每一層之狀態向量與特定係數的關係,. ⎤ ⎧C1m ⎫ ⎧U ( x3 )⎫ ⎡ A1m A m2 ⎤ ⎡Φ1m ( x3( m ) ) 0 ⎨ ⎬=⎢ m ⎥⎨ ⎬ m ⎥⎢ ( x ) T 0 Φ m2 ( x3( m ) )⎦ ⎩Cm2 ⎭ 3 ⎩ ⎭ ⎣ L1 L 2 ⎦ ⎣ 36. (C-6).
(47) ⎡C1m ⎤ ⎡ A1m A 2m ⎤ ⎢ m⎥ = ⎢ m m⎥ ⎣C 2 ⎦ ⎣ L1 L 2 ⎦. −1. ⎛ ⎡ A1m A m2 ⎤ m ⎞ ∑ ⎜⎜ ⎢ Lm Lm ⎥ Π ⎟⎟ Κ u m ⎝⎣ 1 2 ⎦ ⎠ N. (C-7a). 其中,矩陣 Π 與各層的材料性質相關, −1. ⎡Φ1m (hm ) 0 ⎤ ⎡ A1m A m2 ⎤ Π =⎢ ⎥ ⎢ ⎥ Φ m2 (hm )⎦ ⎣ Lm1 Lm2 ⎦ ⎣ 0. −1. m. (C-7b). 若電性邊界條件為閉合 φ (h( N ) ) = 0 時,狀態向量 Κ 為. Κ = [a0 cosθ a0 sinθ 1 a1 0 0 0 a2 ]. T. (C-9). 由(2.32)式之頻散關係,可將各比例係數推導如下:. [ = [G '. ] secθ ]. N a0 = G '21 cscθ. a0. N 11. x3( N ) = hN. x3( N ) = hN. ,. θ ≠ nπ. (C-10a). ,. θ ≠ (n − 0.5)π. (C-10b). N a1 = (G '31 ) x( N ) =h 3. (C-10c). N. [. N N N N a 2 = a0 (G 41 cosθ + G42 sin θ ) + G43 + a1G44. ]. x3( N ) = hN. (C-10d). 其中, G' N 見於式(2.32b)。 當波傳為橫向偏振的拉夫波時,物體表面位移與電位移構成之狀 態向量可表示如下︰ U (h( N ) ) = [u sin θ ,−u cosθ ,0, b0u ]. T. (C-11). 此處, u 為拉夫波於表面橫向偏振的位移量。 若電性邊界條件開放 D3 (h( N ) ) = 0 ,且層狀介質表面為自由邊界. τ i (h( N ) ) = 0 時,由(2.22)式之阻抗關係,可得電位與位移的比值, φ (h( N ) ) = b1u. (. N N b1 = G41 sin θ − G42 cosθ. (C-12a). ). x3( N ) = hN. (C-12b). 代回(2.20)式,並擴展至 N 層結構,則特定係數向量可以表示成如下︰. 37.
(48) ⎡C1m ⎤ ⎡ A1m A 2m ⎤ ⎢ m⎥ = ⎢ m m⎥ ⎣C 2 ⎦ ⎣ L1 L 2 ⎦. −1. ⎛ ⎡ A1m A m2 ⎤ m ⎞ ∑ ⎜⎜ ⎢ Lm Lm ⎥ Π ⎟⎟ Κ u m ⎝⎣ 1 2 ⎦ ⎠ N. −1. ⎡Φ1m (hm ) 0 ⎤ ⎡ A1m A m2 ⎤ Π =⎢ ⎥ ⎢ ⎥ Φ m2 (hm )⎦ ⎣ Lm1 Lm2 ⎦ ⎣ 0. (C-13a). −1. m. (C-14b). 其中,. Κ = [sinθ − cosθ 0 0 0 0 0 b1 ]. T. (C-15). 當電性邊界條件為閉合 φ (h( N ) ) = 0 時,則狀態向量 Κ 可以寫成 Κ = [sin θ − cosθ 0 b0 0 0 0 b1 ]. T. (C-16). 同理,由(2.35)與(2.22)式,可以計算出b 0與 b1 的值分別為 N N N ⎛ G11N G42 ⎞ G12 − G41 sin θ ⎟⎟ b0 = ⎜⎜ N N , (θ ≠ nπ ) N N G G G G − N ( ) 42 14 ⎝ 12 44 ⎠ x3 =hN. (C-17a). N N N ⎛ G N G44 ⎞ G24 − G41 ⎟⎟ cos θ b0 = ⎜⎜ 21 , (θ ≠ (n − 0.5)π ) (C-17b) N N N N G G G G − 42 14 ⎝ 12 44 ⎠ x3( N ) =hN. (. N N N b1 = G41 sin θ − G42 cosθ + b0 G44. 38. ). x3( N ) = hN. (C-17c).
(49) 附錄 D 表面聲波元件的製作與實驗架設 本研究採用 IDT/ZnO/Glass 層狀表面聲波元件,以 MEMS 微機 電製程製作,在元件表面製作反射條紋,原本預期進行表面聲波反 射、透射實驗,驗證波傳分析的結果。本附錄將詳述表面聲波元件製 作過程與元件特性分析實驗的架構流程。. D.1 IDT/ZnO/Glass 層狀表面聲波元件的製作 氧化鋅(ZnO)為六方最密堆積晶系結構,具有高機電耦合係數與 光學係數,ZnO 薄膜常用來製作聲波與光電元件,因此被廣泛的運用 於半導體產業中。玻璃因其本身為等向材料,取得容易,且價錢低廉, 透光度量好,實用上具有其優越性,因此本研究採用 ZnO/Glass 層狀 結構做為表面聲波元件。. D.1.1 氧化鋅薄膜的製作 在微機電製程上,氧化鋅薄膜的沉積有很多種方式,常見的包含 濺鍍(Sputtering)、金屬化學氣相沉積(MCVD)、分子束磊晶(MBE)、 脈衝雷射蒸鍍法(PLD)等,其中,濺鍍法是常用且技術較成熟的方式, 為了製作具有良好磊晶(epitaxial)的 ZnO 薄膜,採用射頻(RF power) 濺鍍系統,以期能成長出 C 軸面向(0002)之氧化鋅薄膜。 在濺鍍時,借用交通大學奈米中心之真空射頻濺鍍機,並使用 99.999 %的氧化鋅三吋鈀材,選用四吋鈉鈣玻璃(soda lime glass)基 板。為了避免表面雜質的污染,以標準製程清洗(RCA cleaning)之後, 置入真空射頻濺鍍機,並調整適當參數逕行濺鍍。 氧化鋅薄膜濺鍍完成之後,必須確定是否如預期為 C 軸面向, 採用 X 光繞射(XRD, X-ray diffraction)分析。根據 JCPDS ( Joint. 39.
(50) Committee of Powder Diffraction)資料庫所示,C 軸面向之氧化鋅粉末 的繞射角 2θ = 34.42°。目前本研究已成功的在玻璃基材上鍍出繞射角 2θ = 33.85° ,厚度 1.5 µm 之氧化鋅薄膜,採用的濺鍍參數可參考表 D-1 所列。. D.1.2 交指叉換能器的製作 交指叉換能器之形式取決於光罩設計,其設計參數可參考表 D-2 所列。光罩一般以石英玻璃為基板製作,線寬可達 3~4 µm 以下之水 準。因本研究選用之基板玻璃厚度為 1.1 mm,製作之氧化鋅厚度為 1.5 µm,選擇交指叉換能器線寬為 3 µm,考慮 ZnO 厚度與表面聲波 波長的比值,是為了確保激發出表面聲波。 交指叉換能器的製作方法係利用半導體製程沉積適當厚度之金 屬(以鋁為之)鍍膜,搭配微影製程,以蝕刻製作。由於氧化鋅薄膜極 易受酸所侵蝕,而且氧化鋅與鋁之間接合性強,故在製作時,必須以 舉離法(lift-off)製作。 氧化鋅鍍膜沉積完成後,必須先置入烤箱塗底,塗以 HMDS 增 加與光阻間之附著力,然後再旋上光阻。因為電極厚度為 3000 ~ 5000 å,常用之 FH6400 正光阻可以製作出 2 µm 以上之膜厚,故使用 FH6400 可確保舉離法的成功。經過軟烤(soft bake),曝光(EXP),顯 定影(DEV)之後,利用交大奈米中心之熱阻絲蒸鍍系統(Thermal Evaporation Coater),沉積鋁薄膜於晶圓上。最後,以舉離法將晶圓浸 泡於丙銅(ACE)中,以震盪器去除覆蓋之光阻與多餘的鋁鍍膜,製作 出 IDT/ZnO/Glass 層狀介質表面聲波元件,詳細流程的說明可參考圖 D-1。. 40.
(51) D.2 反射條紋的製作 由於本研究探討表面聲波通過條紋後之反射與透射,故在設計上 如圖 D-2 所示,反射條紋與表面聲波波傳方向夾角 45° 配置,表面聲 由左方的 IDT 激發,以右方與下方的 IDT 接收。 反射條紋的製作過程大體上與交指叉電極的製作程序相同,也採 用舉離法製作。由於反射條紋之高度為本研究的控制參數,鍍膜時的 厚度掌控尤為重要。採用的光阻可製作之膜厚為 2 µm,故反射條紋 的高度約略可控制在 3000 ~ 10000 å 之間。. C.3 實驗架構與流程 為了在實驗中能有良好的量測基準,表面聲波元件的穩定固著相 形重要,因此設計了一試片承載體。圖 D-3 所示為本實驗的真空固定 座,利用真空幫浦的吸力,提供實驗所需的固定平台。圖 D-4 與圖 D-5 則為分解圖,不同尺寸之試片可搭配不同尺寸的吸盤進行實驗。. D.3.1 表面聲波元件的中心頻率量測 氧化鋅薄膜沉積時,不能保證所有的晶體都能百分之百的排列為 C 軸面向,故實際元件之中心頻率可能會和理論值有所差異。此外, 受到交指叉換能器上之波傳損失、電極反射等效應影響,也會造成表 面聲波元件實際的中心頻率偏移。因此,在正式量測反射條紋之研究 前,需先對於表面聲波元件的工作頻率做一量測。 量測表面聲波元件交指叉電極的訊號時,將輸出訊號與輸入訊號 振幅之比值定義為S21( ω ),通常視之為表面聲波元件的頻率響應,如 圖D-6 所示。採用HP 8751A搭配 87511A頻譜分析儀,可直接量測S21( ω ) 參數及中心頻率。 41.
(52) D.3.2 反射與透射率量測 條紋陣列的反射與透射率量測與上一小節之量測相似,比較頻率 響應之變化,可以得到在不同條件參數下之反射與透射率。本實驗的 主要目的在於涼測反射條紋高度、寬度、間距、數量及入射角度的影 響。 由於表面聲波由交指叉電極產生,量測到的條紋陣列頻率響應實 際上包括元件本身的頻率響應。假設原本無條紋陣列時的頻率響應為 SA( ω ),受到條紋陣列影響之頻率響應為SB( ω ),實驗所得之頻率響應 實為SA( ω )SB( ω ),而非原來的SB( ω )頻率響應。. 42.
(53) 表 2-1 鈉鈣玻璃材料常數 密度(g/cm3). 拉梅常數 (GPa). 蒲松比. 介電常數(10-12 F/m). ρ. λ. µ. ν. ε11. 2.484. 23.953. 29.228. 0.229. 64.634. 註 1:除介電係數外,餘為實際量測數據 註 2: C11 = C 22 = C33 = λ + 2 µ. C12 = C23 = C13 = λ. C44 = C55 = C66 =. C11 − C12 =µ 2. 表 2-2 氧化鋅材料常數 密度(g/cm3). 剛性係數(GPa). ρ. C11E. C12E. C13E. E C33. E C44. 5.676. 209.7. 121.1. 105.1. 210.9. 42.5. E 註: C66 = (C11E − C12E )/ 2. 壓電常數(C/m2). 介電常數(10-12 F/m). e15. e31. e33. S ε11. S ε33. -0.59. -0.61. 1.14. 73.8. 78.3. 43.
(54) 表 2-3 純鋁材料常數 密度(g/cm3). 楊氏係數(GPa). 蒲松比. 介電常數(10-12 F/m). ρ. E. ν. ε11. 2.7. 70. 0.33. 15.045. 註: C11 = C22 = C33 =. (1 − ν )E (1 + ν )(1 − 2ν ). C12 = C23 = C13 =. ν ⋅E (1 + ν )(1 − 2ν ). C44 = C55 = C66 =. C11 − C12 E = 2 1 +ν. 表 4-1a 條紋陣列設計參數 圖號. 4-2. 4-3. 4-4. 4-5. 4-7. 4-8. 4-9. 4-10. 氧化鋅厚度(µm ). 1.5. 1.5. 1.5. 1.5. 1.5. 1.5. 1.5. 1.5. 鋁條紋高度(µm ). 0.5. 0.5. 0.5. 0.5. 0.5. 0.5. 0.5. 0.5. 條紋數量 N. 5. 5. 5. 5. 20. 20. 20. 20. 條紋寬 d a (µm ). 3. 3. 30. 30. 3. 3. 30. 30. 條紋間距 d b (µm ). 3. 3. 30. 30. 3. 3. 30. 30. 入射角(deg). 45. 0. 45. 0. 45. 0. 45. 0. 44.
(55) 表 4-1b 條紋陣列設計參數 圖號. 4-13 4-14 4-15 4-16 4-17 4-18 4-19 4-20. 氧化鋅厚度(µm ). 1.5. 1.5. 1.5. 1.5. 1.5. 1.5. 1.5. 1.5. 鋁條紋高度(µm ). 1. 1. 0.5. 0.5. 0.5. 0.5. 0.5. 0.5. 條紋數量 N. 20. 20. 20. 20. 20. 20. 20. 20. 條紋寬 d a (µm ). 30. 30. 3. 30. 1. 30. 0.5. 30. 條紋間距 d b (µm ). 30. 30. 30. 3. 30. 1. 30. 0.5. 入射角(deg). 45. 0. 45. 45. 45. 45. 45. 45. 表 4-1c 條紋陣列設計參數 圖號. 4-24. 4-25. 4-26. 4-27. 4-28. 4-29. 4-30. 氧化鋅厚度(µm ). 1. 1.5. 1.5. 1.5. 1.5. 1.5. 1.5. 鋁條紋高度(µm ). 0.5. 1. 0.5. 0.5. 0.5. 0.5. 0.5. 條紋數量 N. 1. 1. 1. 5. 1. 1. 1. 條紋寬 d a ( µm ). 30. 30. 30. 30. 3. 3. 3. 條紋間距 d b (µm ). -. -. -. 30. -. -. -. 入射角(deg). 45. 45. 45. 45. 45. 15. 0. 45.
(56) 表 D-1 交指叉換能器設計參數 交指叉換能器電極週期. (d ). 6 µm. 交指叉換能器電極寬度. ( de ). 3 µm. 交指叉換能器兩電極間距. ( db ). 3 µm. 交指叉換能器重疊區域. (ω ). 固定值. 交指叉換能器電極數目. (N). 61. 46.
(57) x3 Sagittal plane x2. θ x1. k. 圖 2-1 材料坐標與波傳示意圖. x3. h. B. GB. A. GA. R0. 圖 2-2 單層半無限域材料. 47. x2.
(58) x3 hN. LN. x3(m). Lm. h1. GN. L1. RN-1. G1. R0. x2. L0 G0. 圖 2-3 N 層半無限域材料. x3 h2 h1. Al ZnO. x2. Glass. 圖 2-4 IDT/ZnO/Glass 結構示意圖. 48.
(59) 3500. Rayeigh waves Love waves. Phase velocity (m/s). 3300 3100 2900 2700 2500. 0. 1000 2000 Frequency (MHz). 3000. 圖 2-5 ZnO(1µm)/Glass 表面聲波相速度頻散曲線. Rayeigh waves Love waves. Phase velocity (m/s). 3400. 3200 3000. 2800 2600. 0. 400. 800 1200 1600 Frequency (MHz). 2000. 圖 2-6 Al(0.5µm)/ZnO(1µm)/Glass 表面聲波相速度頻散曲線. 49.
(60) 3500. Rayeigh waves Love waves. Phase velocity (m/s). 3300 3100 2900 2700 2500. 0. 400. 800 1200 1600 Frequency (MHz). 2000. 圖 2-7 ZnO(1.5µm)/Glass 表面聲波相速度頻散曲線. Rayeigh waves Love waves. Phase velocity (m/s). 3400. 3200 3000 2800. 2600. 0. 400. 800 1200 1600 Frequency (MHz). 2000. 圖 2-8 Al(0.5µm)/ZnO(1.5µm)/Glass 表面聲波相速度頻散曲線. 50.
(61) x=0 db. de. x w. d. 圖 2-9 IDT 的脈衝函數模型. Relative amplitude (An/A0). 80. 60. 40. 20. 0 100. 150. 200 250 300 Frequency (MHz). 350. 圖 2-10 IDT 頻率響應模擬結果(N = 61, d = 6µm). 51.
數據



+7




相關文件
In order to assess and appreciate the results of all these studies, and to promote further research on the Suan Shu Shu, an international Symposium was held on August 23-25
Reading Task 6: Genre Structure and Language Features. • Now let’s look at how language features (e.g. sentence patterns) are connected to the structure
Now, nearly all of the current flows through wire S since it has a much lower resistance than the light bulb. The light bulb does not glow because the current flowing through it
One of the technical results of this paper is an identifi- cation of the matrix model couplings ti(/x) corresponding to the Liouville theory coupled to a
Each course at the Institute is assigned a number of units corresponding to the total number of hours per week devoted to that subject, including classwork, laboratory, and the
Schools can administer APASO-II scales/subscales at diff erent times of the school year to achieve different purpose s, e.g. to assess the effectiveness of an intervention progra m
Schools can administer APASO-II scales/subscales at diff erent times of the school year to achieve different purpose s, e.g.. to assess the effectiveness of an intervention progra
y A stochastic process is a collection of "similar" random variables ordered over time.. variables ordered
