Research Article
Single-Machine Scheduling to Minimize Total Completion
Time and Tardiness with Two Competing Agents
Wen-Chiung Lee,
1Yau-Ren Shiau,
2Yu-Hsiang Chung,
3and Lawson Ding
11Department of Statistics, Feng Chia University, Taichung, Taiwan
2Department of Industrial Engineering and System Management, Feng Chia University, Taichung, Taiwan 3Department of Industrial & Engineering Management, National Chiao Tung University, Hsinchu, Taiwan
Correspondence should be addressed to Wen-Chiung Lee; [email protected] Received 25 November 2013; Accepted 12 December 2013; Published 19 January 2014 Academic Editors: F. R. B. Cruz and A. Sede˜no-noda
Copyright © 2014 Wen-Chiung Lee et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
We consider a single-machine two-agent problem where the objective is to minimize a weighted combination of the total completion time and the total tardiness of jobs from the first agent given that no tardy jobs are allowed for the second agent. A branch-and-bound algorithm is developed to derive the optimal sequence and two simulated annealing heuristic algorithms are proposed to search for the near-optimal solutions. Computational experiments are also conducted to evaluate the proposed branch-and-bound and simulated annealing algorithms.
1. Introduction
In traditional scheduling, there is a common goal to minimize
for all the jobs [1–4]. In contrast to that, there is a growing
interest in multiagent scheduling problems where jobs are from several customers who have different goals to pursue.
For instance, Peha [5] gave the telecommunication service
examples where various types of packets and service compete for the use of a commercial satellite, and the problem is to satisfy the service requirements of individual agents to transfer voice, image, and text files for their clients. Brewer
and Plott [6] gave a transportation example where the agents
own transportation resources and compete for the usage of
the infrastructures. Kubzin and Strusevich [7] presented an
example that maintenance operations complete with the real jobs for machine occupancy on maintenance planning. Baker
and Smith [8] gave a sharing example of a prototype shop in
which the department of research and development might be concerned about quick response time, while the department of manufacturing might be more concerned about meeting the due dates.
Agnetis et al. [9] and Baker and Smith [8] were the
pio-neers that brought the multiagent problems into scheduling
field. Agnetis et al. [9] considered the maximum of regular
functions, number of late jobs, and total weighted completion times. They obtained different scenarios depending on the objective function of each agent and on the structure of the processing system. For each scenario, they addressed
the complexity of various problems. Baker and Smith [8]
examined the implications of minimizing an aggregate scheduling objective function in which jobs belonging to different customers are evaluated based on their individual criteria. They demonstrated that the problem to minimize a mix of makespan, maximum lateness, or total weighted
completion time is NP-hard. Cheng et al. [10] considered
the feasibility model of multiagent scheduling on a single machine where each agent’s objective function is to minimize the total weighted number of tardy jobs. They showed that the general problem is strongly NP-complete and developed
the complexity results for some special cases. Ng et al. [11]
addressed a single-machine two-agent problem to minimize the total completion time of the first agent given that the number of tardy jobs of the second agent cannot exceed a certain number. They showed that the problem is NP-hard under high multiplicity encoding and can be solved in
pseudopolynomial time under binary encoding. Lee et al. [12]
discussed a single-machine multiagent scheduling problem in which each agent is responsible for his own set of jobs
Volume 2014, Article ID 596306, 9 pages http://dx.doi.org/10.1155/2014/596306
and wishes to minimize the total weighted completion time of his own set of jobs. They reduced this NP-hard problem to a multiobjective short-path problem. They also provided an efficient approximation algorithm with a reasonably good
worst-case ratio. Agnetis et al. [13] developed the
branch-and-bound algorithms for several single-machine two-agent scheduling problems. They used Lagrangian dual to derive the bounds for the branch-and-bound algorithm in strongly
polynomial time. Lee et al. [14] studied a single-machine
two-agent problem with deteriorating jobs in which the objective function is to minimize the total completion time of jobs from one agent given that no tardy jobs are allowed for the other agent. They provided a branch-and-bound algorithm to derive the optimal solution and several heuristic algorithms
for the proposed problem. Recently, Leung et al. [15]
gen-eralized the single-machine problems proposed by Agnetis
et al. [9] to the case of multiple identical parallel machines.
In addition, they also considered the situations where the jobs may have different release dates and preemptions may
or may not be allowed. Nong et al. [16] studied a
single-machine two-agent scheduling problem for minimizing the total cost in which the cost of the first agent is the maximum weighted completion time while that of the second agent is
the total weighted completion time. Liu et al. [17] considered
single-machine two-agent problems with increasing linear deterioration consideration. They developed the optimal solutions for some problems where the goal is to minimize the objective function of the first agent given that the objective function of the second agent cannot exceed a certain upper
bound. Cheng et al. [18] studied a two-agent single-machine
scheduling problem with release times where the objective is to minimize the total weighted completion time of the jobs of one agent with the constraint that the maximum lateness of the jobs of the other agent does not exceed a given limit. They proposed a branch-and-bound algorithm to
solve problems with up to 24 jobs. Yu et al. [19] developed
the optimal solutions for several single-machine scheduling problems with two competing agents and maintenance
activ-ity. Liu et al. [20] considered single-machine scheduling with
two-agent and sum-of-processing-times-based deterioration effect. They developed some polynomial-time algorithms for the respective problems.
Pinedo [1] pointed out that a customer is often concerned
with multiple objectives. For instance, he might want to have a lower cost and the on-time delivery. To the best of our knowledge, multiagent scheduling problems with the consideration of multiple objectives from the same agent have seldom been discussed in the literature. In this paper, we study a two-agent scheduling problem on a single machine where the objective is to minimize the weighted combination of the total completion time and the total tardiness of jobs from the first agent given that the number of tardy jobs from the second agent is zero. The rest of the paper is organized as follows. In the next section the formulation of our problem
is described. In Section 3, a branch-and-bound algorithm
incorporating several elimination rules and a lower bound is constructed to speed up the search for the optimal solution. In
Section 4, two simulated annealing algorithms are proposed
to solve this problem. InSection 5, a computational
experi-ment is conducted to evaluate the efficiency of the branch-and-bound algorithm and the performance of the proposed simulated annealing algorithms. A conclusion is given in the final section.
2. Problem Description
The problem we study is described as follows. There are𝑛 jobs
ready to be processed. Each job belongs to either one of the
two agents AG1or AG2. For each job𝑗, there is a processing
time𝑝𝑗, a due date𝑑𝑗, and an agent code𝐼𝑗, where𝐼𝑗 = 1
if job𝑗 ∈ AG1or𝐼𝑗 = 2 if job 𝑗 ∈ AG2. Under a schedule
𝑆, let 𝐶𝑗(𝑆) be the completion time of job 𝑗, let 𝑇𝑗(𝑆) =
max{0, 𝐶𝑗(𝑆) − 𝑑𝑗} be the tardiness of job 𝑗, and 𝑈𝑗(𝑆) = 1 if
𝑇𝑗(𝑆) > 0 and zero otherwise. In this paper, we study a single
machine problem to minimize the weighted combination of the total completion time and the total tardiness of jobs from
AG1given that no tardy jobs from AG2are allowed. Using the
conventional three fields of notation, this problem is denoted
by1| ∑𝑗∈AG
2𝑈𝑗 = 0| ∑𝑗∈AG1𝜃𝑇𝑗+ (1 − 𝜃)𝐶𝑗where0 ≤ 𝜃 ≤ 1.
3. A Branch-and-Bound Algorithm
If there is no job from agent AG2and 𝜃 = 1, the problem
under consideration reduces to the classical single-machine total tardiness time problem which is proved to be
NP-hard by Du and Leung [21]. Therefore, a branch-and-bound
algorithm might be a good way to derive the optimal solution. In this section, we will provide several dominance properties to speed up the search process.
3.1. Dominance Properties. In this subsection, we develop a
nonadjacent and several adjacent dominance properties to reduce the searching scope.
Property 1. If jobs𝑖, 𝑗 ∈ AG1,𝑑𝑖≤ 𝑑𝑗, and𝑝𝑖< 𝑝𝑗, then job𝑖
must precede job𝑗 in an optimal schedule.
The following propositions are the ordering criteria on a
pair of adjacent jobs. Suppose that𝑆 and 𝑆are two schedules
of jobs and the only difference between them is a pairwise
interchange of two adjacent jobs 𝑖 and 𝑗. That is, 𝑆 =
(𝜋, 𝑖, 𝑗, 𝜋) and 𝑆 = (𝜋, 𝑗, 𝑖, 𝜋), where 𝜋 and 𝜋each denote
a partial sequence. In addition, let𝑡 denote the completion
time of the last job in𝜋. The completion times of jobs 𝑖 and 𝑗
in𝑆 are
𝐶𝑖(𝑆) = 𝑡 + 𝑝𝑖, (1)
𝐶𝑗(𝑆) = 𝑡 + 𝑝𝑖+ 𝑝𝑗. (2)
Similarly, the completion times of jobs𝑗 and 𝑖 in 𝑆are
𝐶𝑗(𝑆) = 𝑡 + 𝑝𝑗, (3)
Proposition 1. If jobs 𝑖, 𝑗 ∈ 𝐴𝐺1,𝑝𝑖< 𝑝𝑗, and𝑑𝑗 < 𝑑𝑖< 𝑡+𝑝𝑗,
then𝑆 dominates 𝑆.
Proof. Since jobs in partial sequence𝜋 are processed in the
same order in both𝑆 and 𝑆and from (2) and (4), we have
𝐶𝑘(𝑆) = 𝐶𝑘(𝑆) if job 𝑘 ∈ 𝜋 or 𝜋. (5)
To show that𝑆 dominates 𝑆, it suffices to show
𝜃 [𝑇𝑖(𝑆) + 𝑇𝑗(𝑆)] + (1 − 𝜃) [𝐶𝑖(𝑆) + 𝐶𝑗(𝑆)]
< 𝜃 [𝑇𝑖(𝑆) + 𝑇𝑗(𝑆)] + (1 − 𝜃) [𝐶𝑖(𝑆) + 𝐶𝑗(𝑆)] .
(6)
Since𝑝𝑖< 𝑝𝑗and𝑑𝑗 < 𝑑𝑖< 𝑡 + 𝑝𝑗, we have
𝑇𝑖(𝑆) = max {𝑡 + 𝑝𝑖− 𝑑𝑖, 0} , 𝑇𝑗(𝑆) = 𝑡 + 𝑝𝑖+ 𝑝𝑗− 𝑑𝑗, 𝑇𝑗(𝑆) = 𝑡 + 𝑝𝑗− 𝑑𝑗, 𝑇𝑖(𝑆) = 𝑡 + 𝑝 𝑗+ 𝑝𝑖− 𝑑𝑖. (7)
Suppose that 𝑇𝑖(𝑆) is not zero. Note that this is the more
restrictive case since it comprises the case that𝑇𝑖(𝑆) is zero.
From𝑝𝑖< 𝑝𝑗, we have 𝜃 [𝑇𝑖(𝑆) + 𝑇𝑗(𝑆)] + (1 − 𝜃) [𝐶𝑖(𝑆) + 𝐶𝑗(𝑆)] − 𝜃 [𝑇𝑖(𝑆) + 𝑇𝑗(𝑆)] − (1 − 𝜃) [𝐶𝑖(𝑆) + 𝐶𝑗(𝑆)] = 𝑝𝑖− 𝑝𝑗< 0. (8) Thus,𝑆 dominates 𝑆. Proposition 2. If jobs 𝑖, 𝑗 ∈ 𝐴𝐺1,(𝑝𝑖− 𝑝𝑗) + 𝜃(𝑑𝑖− 𝑡 − 𝑝𝑖) < 0,
𝑑𝑗 < 𝑡 + 𝑝𝑗< 𝑑𝑖< 𝑡 + 𝑝𝑖+ 𝑝𝑗, and𝑝𝑖< 𝑝𝑗, then𝑆 dominates
𝑆.
Proposition 3. If jobs 𝑖, 𝑗 ∈ 𝐴𝐺1,𝑑𝑗< 𝑡 + 𝑝𝑗,𝑡 + 𝑝𝑖+ 𝑝𝑗 < 𝑑𝑖,
and𝑝𝑖− (1 − 𝜃)𝑝𝑗 < 0, then 𝑆 dominates 𝑆.
Proposition 4. If jobs 𝑖, 𝑗 ∈ 𝐴𝐺1,𝑡 + 𝑝𝑖 < 𝑑𝑖,𝑡 + 𝑝𝑗 < 𝑑𝑗,
𝑡 + 𝑝𝑖+ 𝑝𝑗 > max{𝑑𝑖, 𝑑𝑗}, and 𝜃(𝑑𝑖− 𝑑𝑗) + (1 − 𝜃)(𝑝𝑖− 𝑝𝑗) < 0,
then𝑆 dominates 𝑆.
Proposition 5. If jobs 𝑖, 𝑗 ∈ 𝐴𝐺1,𝑡+𝑝𝑗 < 𝑑𝑗< 𝑡+𝑝𝑖+𝑝𝑗 < 𝑑𝑖,
and𝜃(𝑡 + 2𝑝𝑗− 𝑑𝑗) + (𝑝𝑖− 𝑝𝑗) < 0, then 𝑆 dominates 𝑆.
Proposition 6. If jobs 𝑖, 𝑗 ∈ 𝐴𝐺1,𝑝𝑖 < 𝑝𝑗, and𝑡 + 𝑝𝑖+ 𝑝𝑗 <
𝑑𝑗 < 𝑑𝑖, then𝑆 dominates 𝑆.
Proposition 7. If jobs 𝑖, 𝑗 ∈ 𝐴𝐺1,𝑡 + 𝑝𝑗 < 𝑑𝑗 < 𝑡 + 𝑝𝑖+ 𝑝𝑗,
(𝑝𝑖− 𝑝𝑗) + 𝜃(𝑡 + 𝑝𝑗− 𝑑𝑗) < 0, and 𝑑𝑖< 𝑡 + 𝑝𝑖, then𝑆 dominates
𝑆.
Proposition 8. If jobs 𝑖, 𝑗 ∈ 𝐴𝐺1,𝑑𝑖< 𝑡 + 𝑝𝑖,𝑡 + 𝑝𝑖+ 𝑝𝑗< 𝑑𝑗,
and(1 − 𝜃)𝑝𝑖< 𝑝𝑗, then𝑆 dominates 𝑆.
Proposition 9. If job 𝑖 ∈ 𝐴𝐺1, job𝑗 ∈ 𝐴𝐺2,𝑝𝑖 < 𝜃𝑝𝑗, and
𝑡 + 𝑝𝑖+ 𝑝𝑗< 𝑑𝑗, then𝑆 dominates 𝑆.
To further facilitate the search process, we provide two properties to determine the feasibility of a partial schedule or the ordering of the remaining unscheduled jobs. Assume
that(𝜋, 𝜋𝑐) is a sequence of jobs where 𝜋 is the scheduled part
with𝑘 jobs and 𝜋𝑐is the unscheduled part with(𝑛 − 𝑘) jobs.
Among the unscheduled jobs, there are𝑛1 jobs from agent
AG1 and𝑛2 jobs from agent AG2 where𝑛1 + 𝑛2 = 𝑛 − 𝑘.
Let𝑆∗ = (𝜋, 𝜋∗) be a sequence such that 𝑛1jobs from agent
AG1are first scheduled in the shortest processing time (SPT)
rule, followed by𝑛2jobs from agent AG2in the earliest due
date (EDD) rule. In addition, let𝑑(1)2 ≤ 𝑑2(2) ≤ ⋅ ⋅ ⋅ ≤ 𝑑2(𝑛2)
denote the due dates of the remaining 𝑛2 jobs from agent
AG2 when they are arranged in the EDD rule. Moreover,
let𝑝(1)2 , 𝑝2(2), . . . , 𝑝(𝑛2
2)denote their corresponding processing
times and let𝐶[𝑘]be the completion times of the last job in𝜋.
Property 2. If there exists a𝑗 such that 𝐶[𝑘]+∑𝑗𝑖=1𝑝2(𝑖)−𝑑2(𝑗)> 0
for some𝑗 = 1, 2, . . . , 𝑛2, then sequence (𝜋, 𝜋𝑐) is infeasible.
Property 3. If∑𝑘∈𝜋∗𝑈𝑘(𝑆∗) = 0, then 𝑆∗ = (𝜋, 𝜋∗) dominates
sequences of the type(𝜋, 𝜋𝑐).
3.2. A Lower Bound. The efficiency of the branch-and-bound
algorithm also depends on the lower bound of the partial sequence. Assume that PS is a partial schedule in which the
order of the first 𝑘 jobs is determined and let US be the
unscheduled part with(𝑛 − 𝑘) jobs. Among the unscheduled
jobs, there are𝑛1jobs from agent AG1and𝑛2jobs from agent
AG2. Moreover, let 𝑑2(1) ≤ 𝑑2(2) ≤ ⋅ ⋅ ⋅ ≤ 𝑑2(𝑛2) denote the
due dates of the remaining 𝑛2 jobs from agent AG2 when
they are arranged in the EDD rule and 𝑝2(1), 𝑝2(2), . . . , 𝑝2(𝑛2)
denote their corresponding processing times. In addition, let
𝑝1
(1) ≤ 𝑝(2)1 ≤ ⋅ ⋅ ⋅ ≤ 𝑝(𝑛11)denote the processing times of the
remaining𝑛1jobs from agent AG1 when they are arranged
in the SPT rule and𝑑1(1) ≤ 𝑑1(2) ≤ ⋅ ⋅ ⋅ ≤ 𝑑1(𝑛1)denote the
due dates of the remaining 𝑛1 jobs from agent AG1 when
they are arranged in the EDD rule. To derive the lower bound
of the objective function, we construct𝑛1pseudo jobs from
agent AG1 in the way that job 𝑗 from agent AG1 has the
processing time𝑝1(𝑗)and due date𝑑1(𝑗). The idea to derive the
lower bound of the completion times of jobs from agent AG1
is to assign the completion times to jobs from agent AG2as
late as possible without violating the assumption of no tardy
jobs from agent AG2and then to proceed jobs from agent AG1
into the machine available periods with the assumption that
jobs splitting is allowed for jobs from agent AG1. In addition,
let𝑡 be the completion time of the last job in partial schedule
PS. The procedures are basically divided into two phases. The first phase is to calculate the latest time to start processing
bounds for the completion times of jobs from agent AG1. The steps are given as follows.
Phase I
Step 1. Set𝑖 = 𝑛2,𝑠𝑡 = ∞, and 𝑡𝑛2+1= ∞.
Step 2. If𝑑2(𝑖) < 𝑠𝑡, set 𝑡𝑖 = 𝑑2(𝑖)− 𝑝2(𝑖). Otherwise, set
𝑡𝑖= 𝑠𝑡 − 𝑝(𝑖)2 .
Step 3. Set𝑠𝑡 = 𝑡𝑖and𝑖 = 𝑖 − 1. If 𝑖 ≥ 1, go to Step 2.
Step 4. Output(𝑡1, 𝑡2, . . . , 𝑡𝑛2, 𝑡𝑛2+1). Phase II
Step 1. Set𝑖 = 1 and 𝑘 = 0. Step 2. Set𝑘 = 𝑘 + 1.
Step 3. If𝑡+𝑝(𝑖)1 > 𝑡𝑘, set𝑝1(𝑖)= 𝑝1(𝑖)−(𝑡𝑘−𝑡), 𝑡 = 𝑡𝑘+𝑝(𝑘)2
and go to Step 2. Otherwise, set𝑡 = 𝑡+𝑝(𝑖)1 and𝐶1(𝑖) = 𝑡.
Step 4. If𝑖 < 𝑛1, set𝑖 = 𝑖 + 1 and go to Step 3.
Step 5. Output(𝐶1(1), 𝐶1(2), . . . , 𝐶1(𝑛
1)).
Thus, the lower bound of the weighted combination of the total completion time and the total tardiness for PS is
LB(PS) = ∑ 𝑗∈AG1∩PS ((1 − 𝜃) 𝐶[𝑗](PS) + 𝜃𝑇[𝑗](PS)) +∑𝑛1 𝑗=1 (1 − 𝜃) 𝐶1(𝑗) + 𝜃 max {0, 𝐶1(𝑗) − 𝑑1(𝑗)} . (9)
4. The Simulated Annealing Algorithm
Metaheuristic algorithms have been successfully applied
to solve many scheduling or optimization problems [22–
25]. The simulated annealing (SA) algorithm is one of the
most popular ones. It is originally proposed by Kirkpatrick
et al. [26] and has been successfully applied to solve many
combinatorial optimization problems. The advantage of SA algorithm is that it could avoid getting trapped in a local optimum. In this paper, we utilize the SA algorithm to derive the near-optimal solution for the proposed problem. A brief description of the SA procedure is as follows. Given an initial sequence, a new sequence is created by a random neighborhood generation. The new sequence is accepted if it has a smaller objective function than the original sequence; otherwise, it is accepted with some probability that decreases as the process evolves. The exchange condition is initially set to a high level so that a neighborhood exchange could happen frequently in early iterations. It is gradually lowered using a predetermined cooling strategy so that it becomes more difficult to exchange in later iterations unless a better solution is obtained.
The key elements of the SA algorithm are as follows. (1) Initial Sequence. Since no tardy job is allowed for agent
AG2and the SPT rule yields the optimal solution for the total
completion time problem, the initial sequence is constructed
as follows. Jobs from agent AG2are first placed according to
the EDD rule, followed by jobs from agent AG1according to
the SPT rule.
(2) Neighborhood Generation. Neighborhood generation plays an important role in the efficiency of the SA method. Three neighborhood generation methods are used in the preliminary study. They are the pairwise interchange (PI), the extraction and forward-shifted reinsertion (EFSR), and the extraction and backward-shifted reinsertion (EBSR) movements. It is observed that the PI movement yields a better solution in general. Thus, it is used in later analysis. (3) Acceptance Probability. In SA, solutions are accepted according to the magnitude of increase in the objective function and the temperature. The probability of acceptance is generated from an exponential distribution:
𝑃 (accept) = exp (−𝛼 × ΔTC) , (10)
where𝛼 is the control parameter and ΔTC is the change in
the objective function. In addition, the method of changing𝛼
at the𝑘th iteration is obtained from Ben-Arieh and Maimon
[27] and is given by
𝛼 = 𝑘
𝛽, (11)
where𝛽 is an experimental factor. After some pretests, we
chose𝛽 = 6000. If the weighted combination of the total
completion time and the total tardiness increases as a result of a random neighborhood movement, the new sequence is
accepted when𝑃(accept) > 𝑟, where 𝑟 is a uniform random
number between 0 and 1.
(4) Objective Function. The objective function is usually cho-sen to be the one that we want to minimize. Thus, in the first
simulated annealing algorithm SA1, the objective function is
∑𝑗∈AG1𝜃𝑇𝑗+ (1 − 𝜃)𝐶𝑗and regenerates the neighborhood if it
is infeasible. Since our problem is to minimize an objective function under a constraint, it is reasonable to add the constraint into the objective function. Thus, in the second
simulated annealing algorithm SA2, the objective function is
modified to∑𝑗∈AG1𝜃𝑇𝑗+ (1 − 𝜃)𝐶𝑗+ 𝜆 ∑𝑗∈AG2𝑇𝑗where𝜆 is
chosen to be 1000 after some preliminary tests.
(5) Stopping Condition. Our preliminary tests showed that the schedule is quite stable after 400𝑛 iterations, where 𝑛 is the number of jobs. Thus, 400𝑛 was used as the number of iterations.
5. Computational Experiments
In this section, we conducted the computational experiments to evaluate the performance of the branch-and-bound and the proposed SA algorithms. The algorithms were coded in Fortran 90 and run on a personal computer with Intel(R) Core(TM)2 Duo CPU T7500 2.20 GHz and 2.99 GB RAM under Windows XP. The job processing times were generated
Table 1: The performance of the B&B with𝑛 = 12 and 𝜃 = 0.5.
P 𝜏 R Number of nodes CPU time
Mean SD Mean SD 0.25 0.25 0.25 275.81 182.83 0.01 0.08 0.50 389.64 327.66 0.00 0.07 0.75 496.82 774.90 0.00 0.07 0.50 0.25 378.42 363.44 0.00 0.06 0.50 504.80 636.00 0.00 0.07 0.75 473.48 474.64 0.00 0.06 0.75 0.25 154.05 169.55 0.00 0.04 0.5 214.68 244.00 0.00 0.05 0.5 0.25 0.25 323.24 228.37 0.00 0.05 0.50 345.06 332.54 0.01 0.09 0.75 362.94 492.78 0.00 0.06 0.50 0.25 105.47 96.16 0.00 0.03 0.50 216.62 246.72 0.01 0.08 0.75 293.75 285.05 0.00 0.06 0.75 0.25 23.18 35.97 0.00 0.02 0.5 67.08 105.95 0.00 0.03 0.75 0.25 0.25 115.18 96.11 0.00 0.05 0.50 160.90 123.03 0.00 0.05 0.75 104.57 169.79 0.00 0.04 0.50 0.25 3.95 25.52 0.00 0.03 0.50 23.55 50.71 0.00 0.02 0.75 66.48 78.98 0.00 0.03 0.75 0.25 4.82 20.06 0.00 0.02 0.5 5.98 29.08 0.00 0.02
Table 2: ANOVA table for the number of nodes with 𝑛 = 12 and 𝜃 = 0.5. Source SS DF MS F 𝑃 value P 2 36236586 18118293 189.52 0.00 (𝜏, R) 7 19531459 2790208 29.19 0.00 Error 2390 2.28𝐸 + 08 95598 Total 2399 2.84𝐸 + 08
from a uniform distribution over the integers 1 to 100 and the due dates of jobs were generated from a uniform distribution
over the integers between𝑇(1 − 𝜏 − 𝑅/2) and 𝑇(1 − 𝜏 + 𝑅/2),
where𝑅 is the due date range factor, 𝜏 is the tardiness factor,
and𝑇 is the total processing time of all the jobs.
The computational experiments were divided into four parts. In the first part of the experiment, we studied the effects
of the due date factors𝜏 and 𝑅 and the proportion of jobs from
the second agent𝑃 to the performance of the
branch-and-bound algorithm. The job size𝑛 was 12, and the coefficient of
the weighted combination of the total completion time and
the total tardiness𝜃 was 0.5. Three values of the proportion
of jobs from agent AG1 were considered, that is,𝑃 = 0.25,
0.5, and 0.75. Eight combinations of(𝜏, 𝑅) values were tested,
that is, (0.25, 0.25), (0.25, 0.50), (0.25, 0.75), (0.5, 0.25), (0.5,
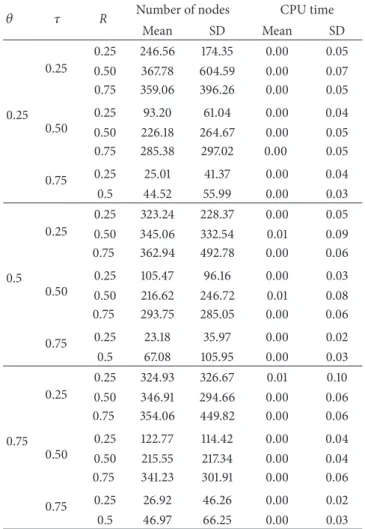
Table 3: The performance of the B&B with𝑛 = 12 and 𝑃 = 0.5.
𝜃 𝜏 R Number of nodes CPU time
Mean SD Mean SD 0.25 0.25 0.25 246.56 174.35 0.00 0.05 0.50 367.78 604.59 0.00 0.07 0.75 359.06 396.26 0.00 0.05 0.50 0.25 93.20 61.04 0.00 0.04 0.50 226.18 264.67 0.00 0.05 0.75 285.38 297.02 0.00 0.05 0.75 0.25 25.01 41.37 0.00 0.04 0.5 44.52 55.99 0.00 0.03 0.5 0.25 0.25 323.24 228.37 0.00 0.05 0.50 345.06 332.54 0.01 0.09 0.75 362.94 492.78 0.00 0.06 0.50 0.25 105.47 96.16 0.00 0.03 0.50 216.62 246.72 0.01 0.08 0.75 293.75 285.05 0.00 0.06 0.75 0.25 23.18 35.97 0.00 0.02 0.5 67.08 105.95 0.00 0.03 0.75 0.25 0.25 324.93 326.67 0.01 0.10 0.50 346.91 294.66 0.00 0.06 0.75 354.06 449.82 0.00 0.06 0.50 0.25 122.77 114.42 0.00 0.04 0.50 215.55 217.34 0.00 0.04 0.75 341.23 301.91 0.00 0.06 0.75 0.25 26.92 46.26 0.00 0.02 0.5 46.97 66.25 0.00 0.03
Table 4: ANOVA table for the number of nodes with 𝑛 = 12 and 𝑃 = 0.5. Source SS DF MS F 𝑃 value 𝜃 2 113054 56527 0.74 0.48 (𝜏, R) 7 38742472 5534639 72.26 0.00 Error 2390 1.83𝐸 + 08 76593 Total 2399 2.22𝐸 + 08
0.50), (0.5, 0.75), (0.75, 0.25), and (0.75, 0.50). The mean and the standard deviation of the number of nodes and the mean and the standard deviation of the CPU time (in seconds) were reported for the branch-and-bound algorithm. 100 replications were randomly generated for each case and
the results were presented inTable 1. A two-way analysis of
variance (ANOVA) on the number of nodes of the
branch-and-bound algorithm was constructed and given inTable 2.
The resulting𝐹 value of factor 𝑃 was 189.52 with a 𝑃 value
close to 0, which indicated that the values of𝑃 really affect
the performance of the branch-and-bound algorithm. In fact,
problems are easier to solve when the value of 𝑃 is larger.
The main reason is thatProperty 2is more powerful in this
case. In addition, the resulting𝐹 value of due date factor 𝜏
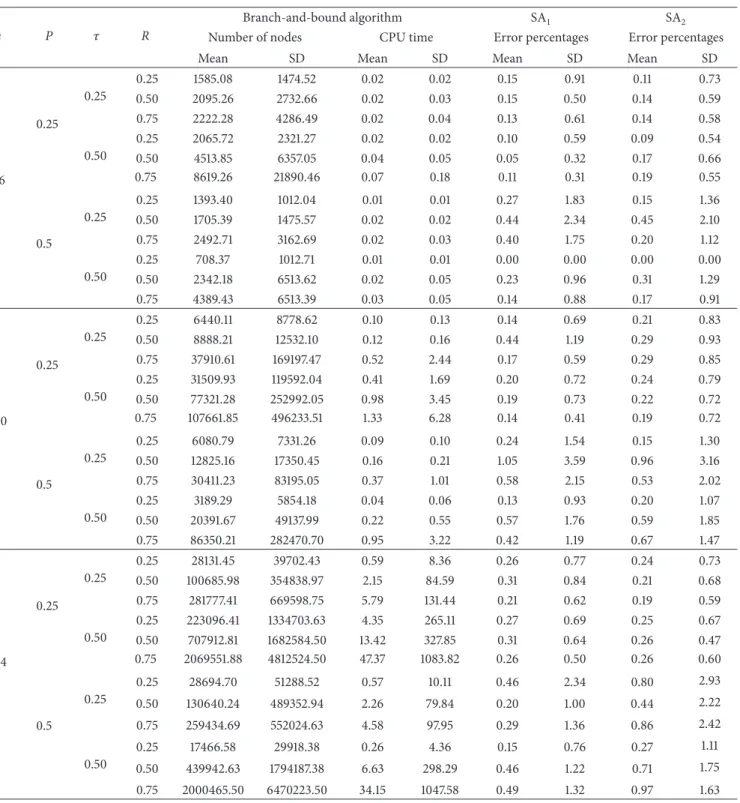
Table 5: The performance of the B&B and SA algorithms (𝜃 = 0.5).
n P 𝜏 R
Branch-and-bound algorithm SA1 SA2
Number of nodes CPU time Error percentages Error percentages
Mean SD Mean SD Mean SD Mean SD
16 0.25 0.25 0.25 1585.08 1474.52 0.02 0.02 0.15 0.91 0.11 0.73 0.50 2095.26 2732.66 0.02 0.03 0.15 0.50 0.14 0.59 0.75 2222.28 4286.49 0.02 0.04 0.13 0.61 0.14 0.58 0.50 0.25 2065.72 2321.27 0.02 0.02 0.10 0.59 0.09 0.54 0.50 4513.85 6357.05 0.04 0.05 0.05 0.32 0.17 0.66 0.75 8619.26 21890.46 0.07 0.18 0.11 0.31 0.19 0.55 0.5 0.25 0.25 1393.40 1012.04 0.01 0.01 0.27 1.83 0.15 1.36 0.50 1705.39 1475.57 0.02 0.02 0.44 2.34 0.45 2.10 0.75 2492.71 3162.69 0.02 0.03 0.40 1.75 0.20 1.12 0.50 0.25 708.37 1012.71 0.01 0.01 0.00 0.00 0.00 0.00 0.50 2342.18 6513.62 0.02 0.05 0.23 0.96 0.31 1.29 0.75 4389.43 6513.39 0.03 0.05 0.14 0.88 0.17 0.91 20 0.25 0.25 0.25 6440.11 8778.62 0.10 0.13 0.14 0.69 0.21 0.83 0.50 8888.21 12532.10 0.12 0.16 0.44 1.19 0.29 0.93 0.75 37910.61 169197.47 0.52 2.44 0.17 0.59 0.29 0.85 0.50 0.25 31509.93 119592.04 0.41 1.69 0.20 0.72 0.24 0.79 0.50 77321.28 252992.05 0.98 3.45 0.19 0.73 0.22 0.72 0.75 107661.85 496233.51 1.33 6.28 0.14 0.41 0.19 0.72 0.5 0.25 0.25 6080.79 7331.26 0.09 0.10 0.24 1.54 0.15 1.30 0.50 12825.16 17350.45 0.16 0.21 1.05 3.59 0.96 3.16 0.75 30411.23 83195.05 0.37 1.01 0.58 2.15 0.53 2.02 0.50 0.25 3189.29 5854.18 0.04 0.06 0.13 0.93 0.20 1.07 0.50 20391.67 49137.99 0.22 0.55 0.57 1.76 0.59 1.85 0.75 86350.21 282470.70 0.95 3.22 0.42 1.19 0.67 1.47 24 0.25 0.25 0.25 28131.45 39702.43 0.59 8.36 0.26 0.77 0.24 0.73 0.50 100685.98 354838.97 2.15 84.59 0.31 0.84 0.21 0.68 0.75 281777.41 669598.75 5.79 131.44 0.21 0.62 0.19 0.59 0.50 0.25 223096.41 1334703.63 4.35 265.11 0.27 0.69 0.25 0.67 0.50 707912.81 1682584.50 13.42 327.85 0.31 0.64 0.26 0.47 0.75 2069551.88 4812524.50 47.37 1083.82 0.26 0.50 0.26 0.60 0.5 0.25 0.25 28694.70 51288.52 0.57 10.11 0.46 2.34 0.80 2.93 0.50 130640.24 489352.94 2.26 79.84 0.20 1.00 0.44 2.22 0.75 259434.69 552024.63 4.58 97.95 0.29 1.36 0.86 2.42 0.50 0.25 17466.58 29918.38 0.26 4.36 0.15 0.76 0.27 1.11 0.50 439942.63 1794187.38 6.63 298.29 0.46 1.22 0.71 1.75 0.75 2000465.50 6470223.50 34.15 1047.58 0.49 1.32 0.97 1.63
the values of𝜏 or 𝑅 have statistically significant effects on the
difficulty of the problem. A closer look atTable 1revealed that
problems are easier to solve as𝑅 decreases or when 𝜏 = 0.75.
The main reason is thatProperty 2and the lower bound are
more powerful in those cases.
Similar to the first part of the experiment, the second part
was to test the effects of the coefficient𝜃 as well as the effects
of the due date factors𝜏 and 𝑅. The job size was fixed at 12,
and𝑃 was 0.5. Three different values of 𝜃 (0.25, 0.5, and 0.75)
and eight values of(𝜏, 𝑅) values were tested, that is, (0.25,
0.25), (0.25, 0.50), (0.25, 0.75), (0.5, 0.25), (0.5, 0.50), (0.5, 0.75), (0.75, 0.25), and (0.75, 0.50). As a consequence, 24 cases were tested and 100 replications were randomly generated
for each case. The results were presented inTable 3. A
two-way ANOVA on the number of nodes was utilized to test the effects of the parameters to the performance of the
branch-and-bound algorithm, and the result was reported inTable 4.
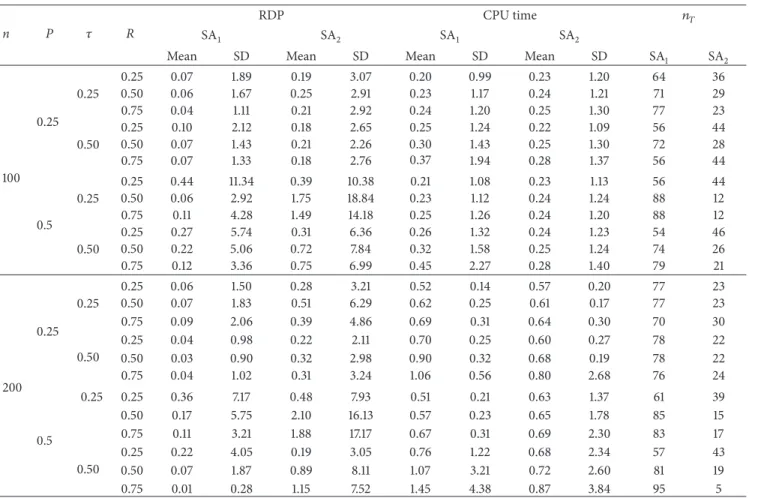
Table 6: The performance of the SA1and SA2algorithms with𝜃 = 0.5.
n P 𝜏 R
RDP CPU time 𝑛𝑇
SA1 SA2 SA1 SA2
Mean SD Mean SD Mean SD Mean SD SA1 SA2
100 0.25 0.25 0.25 0.07 1.89 0.19 3.07 0.20 0.99 0.23 1.20 64 36 0.50 0.06 1.67 0.25 2.91 0.23 1.17 0.24 1.21 71 29 0.75 0.04 1.11 0.21 2.92 0.24 1.20 0.25 1.30 77 23 0.50 0.25 0.10 2.12 0.18 2.65 0.25 1.24 0.22 1.09 56 44 0.50 0.07 1.43 0.21 2.26 0.30 1.43 0.25 1.30 72 28 0.75 0.07 1.33 0.18 2.76 0.37 1.94 0.28 1.37 56 44 0.5 0.25 0.25 0.44 11.34 0.39 10.38 0.21 1.08 0.23 1.13 56 44 0.50 0.06 2.92 1.75 18.84 0.23 1.12 0.24 1.24 88 12 0.75 0.11 4.28 1.49 14.18 0.25 1.26 0.24 1.20 88 12 0.50 0.25 0.27 5.74 0.31 6.36 0.26 1.32 0.24 1.23 54 46 0.50 0.22 5.06 0.72 7.84 0.32 1.58 0.25 1.24 74 26 0.75 0.12 3.36 0.75 6.99 0.45 2.27 0.28 1.40 79 21 200 0.25 0.25 0.25 0.06 1.50 0.28 3.21 0.52 0.14 0.57 0.20 77 23 0.50 0.07 1.83 0.51 6.29 0.62 0.25 0.61 0.17 77 23 0.75 0.09 2.06 0.39 4.86 0.69 0.31 0.64 0.30 70 30 0.50 0.25 0.04 0.98 0.22 2.11 0.70 0.25 0.60 0.27 78 22 0.50 0.03 0.90 0.32 2.98 0.90 0.32 0.68 0.19 78 22 0.75 0.04 1.02 0.31 3.24 1.06 0.56 0.80 2.68 76 24 0.5 0.25 0.25 0.36 7.17 0.48 7.93 0.51 0.21 0.63 1.37 61 39 0.50 0.17 5.75 2.10 16.13 0.57 0.23 0.65 1.78 85 15 0.75 0.11 3.21 1.88 17.17 0.67 0.31 0.69 2.30 83 17 0.50 0.25 0.22 4.05 0.19 3.05 0.76 1.22 0.68 2.34 57 43 0.50 0.07 1.87 0.89 8.11 1.07 3.21 0.72 2.60 81 19 0.75 0.01 0.28 1.15 7.52 1.45 4.38 0.87 3.84 95 5
value of 0.48, which implied that𝜃 does not affect the
per-formance of the branch-and-bound algorithm. On the other hand, the statistical test showed that the due date factors have significant effects on the performance of the branch-and-bound algorithm, and the problems are easier to solve when 𝜏 = 0.75, which is consistent with the findings in the first part of the experiment.
The main purpose of the third part of the experiment was to study the impact of the number of jobs to the performance of the branch-and-bound algorithms and the accuracy of the proposed simulated annealing algorithms. Three different job sizes (𝑛 = 16, 20, and 24) were tested. Since the problems are
relatively easier to solve when𝜏 = 0.75 and 𝜃 was found to be
the insignificant factors in the second part of the experiments,
we ignored the cases when𝜏 = 0.75 and fixed 𝜃 at 0.5 in the
third part of the experiment. Two values of𝜏 (0.25, 0.50) and
three values of𝑃 (0.25, 0.50, and 0.75) and of 𝑅 (0.25, 0.50,
and 0.75) were tested. The mean and standard deviation of the number of nodes and the mean and standard deviation of the CPU time (in seconds) for the branch-and-bound algorithm were given, while only the mean and standard deviation of the error percentages of the SA algorithms were reported. The error percentage of the solution produced by SA is calculated as
(𝑉 − 𝑉∗)
𝑉∗ × 100%, (12)
where𝑉 is the weighted combination of the total completion
time and the total tardiness of the solution generated by SA
and 𝑉∗ is the value of the optimal solution obtained from
the branch-and-bound algorithm. The execution time of SA algorithms was not recorded since they were finished within a second. For each condition, 100 replications were generated
and the results were given inTable 5. It is observed that the
branch-and-bound algorithm could solve problems of up to 24 jobs in a reasonable amount of time. However, the number of nodes and execution time grow exponentially as the number of jobs increases since the problem is NP-hard. The
most time consuming case(𝑛, 𝑃, 𝜏, 𝑅) = (24, 0.25, 0.5, 0.75)
took an average execution time of 47.37 seconds. As to the performance of the SA algorithms, the results showed that both of them are quite accurate with a mean percentage error of less than 1% for all the tested cases. Moreover, it seemed
that SA2performed better than SA1when the number of jobs
is 16; however, the trend is not obvious as the number of jobs becomes larger. Thus, we would study the performance of the algorithms for large job-size problems in the last part of the experiments.
We tested two job sizes, that is, 𝑛 = 100 and 200, in
the last part of the experiments. We randomly generated 100 instances for each situation and we reported the results inTable 6. The mean and standard deviation of the relative deviation percentage (RDP) were given. The RDP of the
solution produced by a simulated annealing algorithm is calculated as
(𝑉𝑖− min {𝑉1, 𝑉2})
min{𝑉1, 𝑉2} × 100% (13)
for𝑖 = 1, 2, where 𝑉𝑖is the value of the weighted combination
of the total completion time and the total tardiness of the jobs
from the first agent generated by the𝑖th simulated annealing
algorithm. The mean and standard deviation of the execution time were also reported. In addition, we recorded the number
of times (𝑛𝑇) it yields the minimum value. It was seen that
both algorithms are very fast since the mean execution time is less than 1 second for all the tested cases. However, the first SA algorithm performs better than the second one in terms of the RDP values and the number of times it yields the minimum value. Thus, it is recommended as the number of jobs increases.
6. Conclusion
In this paper, we considered a two-agent single-machine scheduling problem where the objective is to minimize the weighted combination of the total completion time and the total tardiness of the jobs of the first agent given that no tardy job is allowed for the second agent. We proposed a branch-and-bound algorithm to solve the problem optimally and two simulated annealing algorithms to find near-optimal solutions. The computational experiments showed that the branch-and-bound algorithm could solve problems of up to 24 jobs in a reasonable amount of time. It also showed that the performance of the first SA algorithm is very good, yielding an average error percentage of less than 1% for all the tested cases.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
The authors are grateful to the referees for their comments. This work is supported by the National Science Council of Taiwan, under Grant no. NSC 1000-2221-E-035-029-MY3.
References
[1] M. Pinedo, Scheduling: Theory, Algorithms and Systems, Springer, New York, NY, USA, 3rd edition, 2008.
[2] R. Rudek, “Computational complexity and solution algorithms for flowshop scheduling problems with the learning effect,” Computers and Industrial Engineering, vol. 61, no. 1, pp. 20–31, 2011.
[3] J. B. Wang and J. J. Wang, “Single machine scheduling with sum-of-logarithm-processing-time based and position based learn-ing effects,” Optimization Letters, 2012.
[4] S. J. Yang, “Unrelated parallel-machine scheduling with deterio-ration effects and deteriorating multi-maintenance activities for
minimizing the total completion time,” Applied Mathematical Modelling, vol. 37, pp. 2995–3005, 2012.
[5] J. M. Peha, “Heterogeneous-criteria scheduling: minimizing weighted number of tardy jobs and weighted completion time,” Computers and Operations Research, vol. 22, no. 10, pp. 1089– 1100, 1995.
[6] P. J. Brewer and C. R. Plott, “A binary conflict ascending price (BICAP) mechanism for the decentralized allocation of the right to use railroad tracks,” International Journal of Industrial Organization, vol. 14, no. 6, pp. 857–886, 1996.
[7] M. A. Kubzin and V. A. Strusevich, “Planning machine mainte-nance in two-machine shop scheduling,” Operations Research, vol. 54, no. 4, pp. 789–800, 2006.
[8] K. R. Baker and J. C. Smith, “A multiple-criterion model for machine scheduling,” Journal of Scheduling, vol. 6, no. 1, pp. 7– 16, 2003.
[9] A. Agnetis, P. B. Mirchandani, D. Pacciarelli, and A. Pacifici, “Scheduling problems with two competing agents,” Operations Research, vol. 52, no. 2, pp. 229–242, 2004.
[10] T. C. E. Cheng, C. T. Ng, and J. J. Yuan, “Multi-agent scheduling on a single machine to minimize total weighted number of tardy jobs,” Theoretical Computer Science, vol. 362, no. 1–3, pp. 273– 281, 2006.
[11] C. T. Ng, T. C. E. Cheng, and J. J. Yuan, “A note on the complexity of the problem of two-agent scheduling on a single machine,” Journal of Combinatorial Optimization, vol. 12, no. 4, pp. 387– 394, 2006.
[12] K. B. Lee, B.-C. Choi, J. Y.-T. Leung, and M. L. Pinedo, “Approxi-mation algorithms for multi-agent scheduling to minimize total weighted completion time,” Information Processing Letters, vol. 109, no. 16, pp. 913–917, 2009.
[13] A. Agnetis, G. Pascale, and D. Pacciarelli, “A lagrangian ap-proach to single-machine scheduling problems with two com-peting agents,” Journal of Scheduling, vol. 12, no. 4, pp. 401–415, 2009.
[14] W.-C. Lee, W.-J. Wang, Y.-R. Shiau, and C.-C. Wu, “A single-machine scheduling problem with two-agent and deteriorating jobs,” Applied Mathematical Modelling, vol. 34, no. 10, pp. 3098– 3107, 2010.
[15] J. Y.-T. Leung, M. Pinedo, and G. H. Wan, “Competitive two-agent scheduling and its applications,” Operations Research, vol. 58, no. 2, pp. 458–469, 2010.
[16] Q. Q. Nong, T. C. E. Cheng, and C. T. Ng, “Two-agent sched-uling to minimize the total cost,” European Journal of Opera-tional Research, vol. 215, no. 1, pp. 39–44, 2011.
[17] P. Liu, N. Yi, and X. Zhou, “Two-agent single-machine schedul-ing problems under increasschedul-ing linear deterioration,” Applied Mathematical Modelling, vol. 35, no. 5, pp. 2290–2296, 2011. [18] T. C. E. Cheng, Y. H. Chung, S. C. Liao, and W. C. Lee,
“Two-agent singe-machine scheduling with release times to minimize the total weighted completion time,” Computers & Operations Research, vol. 40, pp. 353–361, 2013.
[19] X. Yu, Y. Zhang, D. Xu, and Y. Yin, “Single machine scheduling problem with two synergetic agents and piece-rate mainte-nance,” Applied Mathematical Modelling, vol. 37, no. 3, pp. 1390– 1399, 2013.
[20] P. Liu, N. Yi, X. Zhou, and H. Gong, “Scheduling two agents with sum-of-processing-times-based deterioration on a single machine,” Applied Mathematics and Computation, vol. 219, pp. 8848–8855, 2013.
[21] J. Du and J. Y. T. Leung, “Minimizing Total Tardiness on one Machine is NP-hard,” Mathematics of Operations Research, vol. 15, pp. 483–495, 1990.
[22] M. Soolaki, I. Mahdavi, N. Mahdavi-Amiri, R. Hassanzadeh, and A. Aghajani, “A new linear programming approach and genetic algorithm for solving airline boarding problem,” Applied Mathematical Modelling, vol. 36, no. 9, pp. 4060–4072, 2012. [23] R. Ramezanian and S. M. Mohammad, “Hybrid simulated
annealing and MIP-based heuristics for stochastic lot-sizing and scheduling problem in capacitated multi-stage production system,” Applied Mathematical Modelling, vol. 37, pp. 5134–5147, 2013.
[24] E. Atmaca and A. Ozturk, “Defining order picking policy: a storage assignment model and a simulated annealing solution in AS/RS systems,” Applied Mathematical Modelling, vol. 37, pp. 5069–5079, 2013.
[25] S. M. Goldansaz, F. Jolai, and A. H. Z. Anaraki, “A hybrid impe-rialist competitive algorithm for minimizing makespan in a multi-processor open shop,” Applied Mathematical Modelling, vol. 37, no. 23, pp. 9603–9616, 2013.
[26] S. Kirkpatrick, C. D. Gelatt Jr., and M. P. Vecchi, “Optimization by simulated annealing,” Science, vol. 220, no. 4598, pp. 671–680, 1983.
[27] D. Ben-Arieh and O. Maimon, “Annealing method for PCB assembly scheduling on two sequential machines,” International Journal of Computer Integrated Manufacturing, vol. 5, pp. 361– 367, 1992.
Submit your manuscripts at
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Mathematics
Journal ofHindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Hindawi Publishing Corporation http://www.hindawi.com
Differential Equations
International Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014 Mathematical PhysicsAdvances in
Complex Analysis
Journal ofHindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Optimization
Journal ofHindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Combinatorics
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
International Journal of
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Journal of Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Function Spaces
Abstract and Applied Analysis
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014 International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporation http://www.hindawi.com Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Discrete Dynamics in Nature and Society Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014 Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Discrete Mathematics
Journal ofHindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014