報告題名:
應用於居家照護之移動式座椅機器人之設計
Design of a Mobile Robot for Home Care
作者:劉永翔 系級:機械與電腦輔助工程學系 四丙 學號:D0279283 開課老師:楊世宏 課程名稱:專題實作 開課系所:機械與電腦輔助工程學系 開課學年: 105 學年度 第 一 學期
中文摘要
隨著醫療衛生科技進步,工商業發展及生育率降低,使得人口結構高齡化。 高齡者與行動不便者皆因行動受限導致移動較耗時、費力,且有受傷的風險。本 文將研發移動式座椅機器人,主要以居家照護為主,當高齡者與行動不便者在家 中因體力不支需至座椅休息時,座椅會自行偵測使用者位置,並主動移動至使用 者可乘坐之範圍,藉以降低其移動時受傷的風險。此過程不需依靠他人攙扶或行 動輔助器協助,效益上不僅提升兩者在生活上的便利性,甚至可減少醫療資源的 使用與花費。本文所設計之座椅機器人,主要是將一個輕型塑膠座椅架設於輪型 機器人上,其中以彈簧連接輪型機器人與塑膠座椅,使得機器人移動時為騰空狀 態,當使用者坐下時,機器人為固定狀態,此座椅機器人具有Kinect,主要用於 偵測使用者標記或人臉,並估測其距離,再利用線段掃描法偵測障礙物,使得機 器人可閃避障礙物以移動至使用者可乘坐之範圍。關鍵字:
Kinect、居家照護、移動式機器人Abstract
With the progress of science and technology in medicine, the development of industrial and commercial and fertility rate are reduced, causing population structure to age. Elderly person with reduced mobility is limited because the cause of action to move the more time-consuming, laborious, and there is risk of injury. In this paper, the development of mobile robot seats, mainly in home-based care, when the elderly person with reduced mobility at home weakened and need rest to the seat, the seat will detect the user's location on their own and take the initiative to use mobile who can take the range, thereby reducing the risk of injury when moving it. This process does not need to rely on others or arm action aids assistance, not only to enhance the effectiveness of both the conveniences of life, and even reduce the use and cost of health care resources. This article is designed seat robot, the main is a lightweight plastic chairs set up on a wheeled robot, which is connected to the spring seat and plastic wheel robot, so the robot is moving vacated state, when the user to sit down, robot fixed state, the robot has a seat Kinect, is mainly used to detect a user tag or people's faces and estimate its distance, and then use the line scanning method to detect an obstacle, the robot can move to dodge obstacles to use who can take the range.
目 次
中文摘要 ... 1
Abstract ... 2
目次 ... 3
研究動機與問題 ... 4
文獻回顧與探討 ... 4
研究方法及步驟 ... 6
預期結果 ... 13
參考文獻 ... 14
研究動機與問題
隨著醫療衛生科技進步,工商業發展及生育率降低,使得人口結構高齡化已 成為全球趨勢,根據我國經建會推計,我國將於 106 年成為高齡化社會,114 年 更成為超高齡社會,我國政府與民間長期以來,多關注在高齡者之醫療、照護方 面等問題,相對忽略其行動不便的問題[1],此問題不僅限於高齡者,行動不便者 也因個人身體先天或後天受損、退化,以及暫時性原因,如肢體障礙、視障、骨 折病患等,導致其生活上的不便,對於上述兩者,我國政府與民間除建設無障礙 設施與設備外,也研發許多有助於其生活便利之產品。 座椅雖為人們日常生活的常用坐具供人休息或辦公,只需移動至座椅即可, 但對於高齡者與行動不便者來說,因行動受限導致移動較耗時、費力,且有受傷 的風險。為了協助兩者方便乘坐座椅,本研究結合 Kinect 於座椅上,並運用影像 處理技術,使其能偵測使用者位置,再經由加裝之輪型機器人移動至使用者可乘 坐之範圍,圖 1 為使用時情境。 對於本研究的實行來說,最大的問題在於座椅機器人移動至使用者的過程, 若與障礙物發生碰撞,可能導致家中財物受損或移動所需之時間更常,為了避免 上述情況發生,機器人需具備偵測、閃避障礙物等功能。本計畫原打算採用線段 掃描法所推導之演算法來偵測路況,但因其攝影視角與本研究不同,以致於演算 法結果不適用,所以需重新實驗取得新的運作範圍以利於後續偵測。 (a) (b) 圖 1 使用時情境(a)為準備移動,(b)為移動至人體可乘坐之範圍文獻回顧與探討
世界各先進國家因人口老化問題,老年人口比例皆逐漸上升,我國也不例 外。許多高齡者與行動不便者因身體老化、受損導致行動時需依靠他人攙扶或行動輔助器協助才可正常行動,但少子化、醫療人力短缺等問題,使得照護者人數 相對減少。智慧型機器人輪椅的開發能使高齡者保持獨立自主的生活機能,並減 輕子女與社會的照護負擔。
最早在 1995 年,Miller 和 Slack[2]在研究文獻中提出“robotic wheelchair”這 個名詞,他們將原先使用在機器人身上的各項感測、導航技術,應用在輪椅操作 上,能夠輔助操作者迴避障礙物、到達預定地點、穿過擁擠環境等,開創了機器 人輪椅的研究領域。
之後陸續出現許多相關的研究,例如: Prassler 等人[3]設計了名為“MAid (Mobility Aid for elderly and disabled people)”的機器人輪椅。MAid 上裝有各式感 測器,用來偵測四周環境、障礙物、人員等狀況,高齡者不須精巧的控制能力, 即可輕鬆地駕駛輪椅進入狹窄空間。MAid 還具有路徑自動規劃功能,以自動載 送高齡者通過擁擠人群。Espinosa 等人[4]發展了一套結合最佳化控制與模糊控制 的機器人輪椅智慧型控制系統,此系統除自動導航功能外,亦具有軌跡追蹤 (trajectory tracking)功能,能追蹤地面貼紙控制行動路徑,系統中並考慮負載、致 動器極限等控制條件,以與人的協同控制改善使用者安全性與舒適性。Argyros 等人[5]發展了一個具有追蹤移動物體與閃避障礙物功能的半自主行為能力機器 人輪椅。此輪椅利用聲納偵測周遭障礙物距離,並以全景式攝影機(panoramic camera)追蹤移動物體。Galindo 等人[6]所開發的機器人輪椅 SENA,是以市售電 動輪椅為基礎所開發而成。SENA 裝配有紅外線感測器、雷射測距儀、攝影機等 以達成自動導航的功能,同時並採用語音控制人機互動介面,讓使用者操作更為 便利。Chow 與 Xu[7]模仿人類的導航技巧,開發具有部分學習能力的機器人輪 椅導航方法,其透過多個超音波感測器進行環境感測,並減少控制核心的即時運 算量,以降低硬體需求。Zeng 等人[8]所發展的機器人輪椅是以「可合作的輪椅 助理(collaborative wheelchair assistant, CWA)」為概念,採用低成本的條碼系統做 為各種虛擬路徑(virtual path)規劃的感測器,同時其操作介面簡單,使用者無須 一直操控輪椅。 本研究所設計之座椅機器人概念類似於機器人輪椅,但有些許不同點,首先 它是以日常生活中人們常用的坐具作為研究題材,綜觀過去之研究,大多是以輪 椅作為研究題材,再來本研究目的在於協助高齡者與行動不便者方便乘坐座椅, 利用影像處理技術以及紅外線、攝影機等感測裝置搜尋使用者,並移動至使用者 可乘坐之範圍,進而達到自動化。目前國內尚無與本計畫相關之研究,因此本研 究希望藉由開創新的領域能提升人們的生活品質。
研究方法及步驟
1.1 本研究設計之方法與流程
本研究所設計之座椅機器人之運作流程如圖 2,首先擷取影像,並偵測是否 有使用者標記,此標記為隨手可得之單色物品,再估測標記座標,並回傳該座標 之深度即可得知使用者背面之距離。若偵測不到標記代表使用者可能面對機器人 或不在機器人視線範圍內,此時將改為偵測人臉,人臉為使用者正面之搜尋目 標,當偵測到人臉時,代表使用者面對機器人,此時估測人臉座標,並回傳該座 標之深度即可得知使用者正面之距離。若標記與人臉皆未被偵測代表使用者不在 機器人視線範圍內,此時機器人會順時針轉動 60 度持續搜尋標記或人臉。在偵 測出標記或人臉後,將偵測是否有障礙物,若偵測到障礙物,機器人將會進行避 障功能,若未偵測到障礙物,則開始向標記或人臉移動,並以估測之標記或人臉 距離來判斷是否已移動至使用者可乘坐之範圍,以下章節將介紹本計畫所設計之 方法。 擷取影像 否 是 是 否 否 是 順時針轉動 60 度 是 估測標記距離 進行避障功能 估測人臉距離 向標記/人臉移動 開始 結束 (1.5) (1.5) (1.7) (1.3) 偵測是否有 使用者標記? (1.6) 偵測是否有 障礙物? (1.3) 偵測是否有 人臉? 判斷是否達 到乘坐範圍?圖 2 座椅機器人運作流程圖
1.2 座椅機器人機構設計
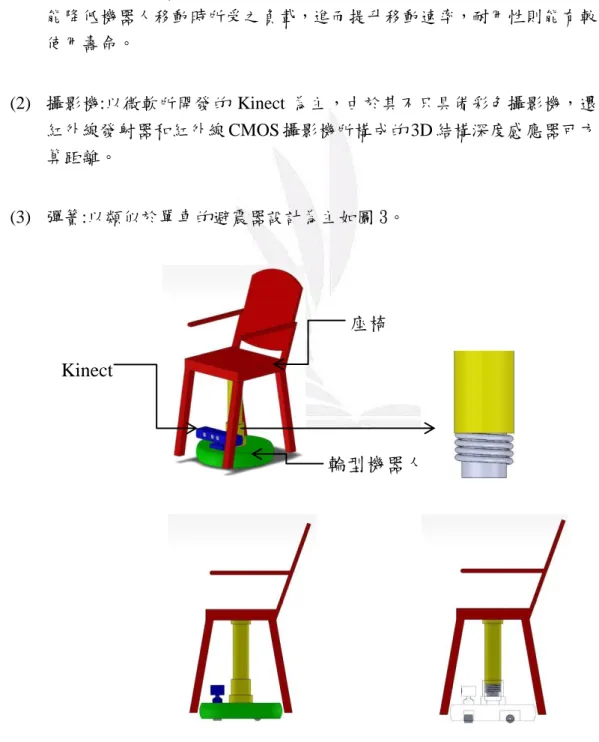
本座椅機器人之機構設計如圖 3,為 SolidWorks 繪製之架構設計示意圖,以 下針對機器人架構進行說明: (1) 座椅:以塑膠材質為主,主要在於其具有輕便性、耐用性…等特性,輕便性 能降低機器人移動時所受之負載,進而提升移動速率,耐用性則能有較長的 使用壽命。 (2) 攝影機:以微軟所開發的 Kinect 為主,由於其不只具備彩色攝影機,還具備 紅外線發射器和紅外線 CMOS 攝影機所構成的 3D 結構深度感應器可方便計 算距離。 (3) 彈簧:以類似於單車的避震器設計為主如圖 3。圖 3 座椅機器人設計 Kinect 座椅 輪型機器人
當座椅未被乘坐時如圖 4,由輪型機器人來帶動,直到移動至使用者 可乘坐之範圍為止,當座椅被乘坐時如圖 5,彈簧將緩慢下降,使椅子接 觸於地面而不再移動,讓使用者可穩定地坐於上方。
圖 4 未乘坐時狀態 圖 5 被乘坐時狀態
1.3 偵測使用者標記
使用者標記採用隨手可得之單色物品如圖 6,配置於人體腰部後方。本計畫 偵測標記方式是先將擷取影像從 RGB 色彩空間轉換成 YCbCr 色彩空間[9],公式 (2)為 RGB 轉換為 YCbCr 之方程式,並分析標記在色彩空間的分布狀況,以像素 為單位,比較每個像素的 Cr 值與閥值 ,以公式(3、4)計算 之若大於閥值則該項素為標記,反之則為背景。 圖 6 使用者標記 圖 7 經影像前處理後之影像 40mm 0mm(2) (3) (4) 其中 Cr(x,y)為(x,y)在 Cr 之像素值。 之後對二值化圖進行斷開運算[10],目的在消除不必要的雜訊,以便擷取出 較為平整之標記輪廓如圖 7。其原理為影像集合 F 被結構元素 I 斷開,其符號記 作: F。I,定義為 ,由定義中即可了解 F 被 I 斷開,為一組 先侵蝕後膨脹的連續運算,F 被 I 侵蝕後又再次被 I 膨脹,進而保留被侵蝕的部 分,並捨去為被侵蝕的地方;其數學形式的定義為: , 其中 代表大括號內含所有集合的聯集。 接著對標記輪廓進行重心座標計算以取得其座標如公式(5、6)[11],並回傳 該座標之深度,判斷座椅機器人是否已移動至人體腰部後方可乘坐之範圍。 (5) (6) 其中 、 為標記影像的重心座標, 為標記影像第 i 點像素的 m 值, 、 為影 像第 i 點的座標,N 即為構成標記影像的像素點數。
1.4 偵測人臉
本計畫中使用者標記為使用者背面之搜尋目標,人臉則為使用者正面之搜尋 目標,因此當座椅機器人偵測不到使用者標記時,代表使用者可能面對機器人或 不在機器人視線範圍內。利用人臉偵測法可分辨為上述何種狀況,當偵測到人臉 時,代表使用者面對機器人,此時以偵測框架中心為人臉座標,回傳該座標之深 度,進而判斷座椅機器人是否已移動至人體可乘坐之範圍。當偵測不到人臉時,代表使用者不在視線範圍內,此時機器人會順時針轉動 60 度持續搜尋標記或人 臉,轉動角的選擇是基於 Kinect 視野角度為水平 57 度。圖 8 為透過 OpenCV 內 建已訓練好的人臉分類器所偵測的結果,方法是採用 Viola 及 Jones 的人臉偵測 法[12],此方法主要有三個特性: (1) 使用積分影像達到快速的特徵計算。 (2) 以 AdaBoost 方法選取少量重要特徵來建構分類器。 (3) 以串聯方式結合許多複雜的分類器,此方式是以重視有用的影像區域來明顯 地提高偵測速率。 圖 8 OpenCV 人臉偵測的結果
1.5 估測使用者
距離
座椅機器人需移動距離的多寡是以與使用者間的距離來判定,標記距離等於 使用者背面之距離,人臉距離則等於使用者正面之距離。本計畫在偵測使用者標 記或人臉的同時,利用 Kinect 所拍攝之 RGBD 影像如圖 9,可計算出與使用者 標記或人臉間的距離。圖 9 RGBD 影像
1.6 偵測障礙物
為了使座椅機器人能在未知的環境中行走,必須具備避障的基本能力,本計 畫以線段掃描法來偵測路況[13]。此方法的原理是使用三條線段針對畫面 1/3 處 地面進行掃描,分別為左中右三段,透過回傳每點的深度可顯示成一張連續深度 剖面資訊圖如圖 10,經此圖可發現三條線段的平均斜率皆會介於 8.5~1.5 之間, 將此平均斜率範圍設為無障礙可安全行走之正常範圍。當任一線段平均斜率變化 超過正常範圍,代表該線段有障礙物為不可行走之路段,藉此判斷是否可以行 走,有無障礙物狀況,左線段到右線段寬度設定為座椅機器人可接受行走之範圍 寬度。 圖 10 深度剖面狀態 由於上述線段掃描法是以 Kinect 俯瞰視角來進行拍攝,使得畫面可擷取將近 1/3 的地面,然而本計畫所架設之 Kinect 視角是偏向仰望,畫面可能僅擷取更少 比例之地面,因此線段掃描法所推導之演算法可能不適用,所以將重新執行實 近 遠 距離 公分(CM) 像素 遠 近 100 150 200 250 300 350 400驗,擷取大量 RGBD 影像,並判斷地面比例,藉此取得新的運作範圍以利於後 續偵測。
1.7 閃避障礙物
當 Kinect 線段偵測到障礙物時,會以 Kinect 的中央 A 點來做偵測,如圖 11 所示,其中 L 為座椅機器人的寬度,透過 Kinect 可得知 到 的像素值,並藉 由公式(7)[14]轉換成障礙物的實際寬度,公式(7)為像素轉換比率之方程式,接著 再 將 每 個 點 轉 換 成 座 標 值 就 可 取 得 B 到 , 最 後 根 據 反 三 角 函 數 ,使座椅機器人轉動 角度。 (7) 其中 x 為障礙物距離的像素,y 為障礙物的實際寬度。 圖 11 座椅機器人與障礙物俯視圖 座椅機器人進行避障時之閃避方向會以線段偵測結果來決定。狀況一,當線 段偵測出左半邊有障礙物時,座椅機器人會以障礙物的右邊作為閃避方向,狀況 二,當偵測出右半邊有障礙物時則以障礙物的左邊作為閃避方向。狀況三,當偵 測出中間有障礙物時,皆以障礙物的右邊作為閃避方向如圖 12。(a) (b) (c) 圖 12 (a)為狀況一示意圖,(b)為狀況二示意圖,(c)為狀況三示意圖
1.8 開發平台
本計畫以 OpenCV 為工具來撰寫所需之程式碼,OpenCV 是一個跨平台的電 腦視覺函示庫,在商業和研究領域中可免費使用,用於開發時的圖像處理、計算 機視覺以及模式辨別程序。因部分所需之功能 OpenCV 有提供,可直接使用節省 部分撰寫程式碼的時間,且 OpenCV 內 Code 有最佳化過,使得處理的速度相當 快。預期結果
本計畫預期完成以機器視覺為基礎具追蹤標記功能之移動式座椅機器人,背 景以居家照護為主,用於協助高齡者與行動不便者方便乘坐座椅,藉由自動化概 念,讓使用者不需主動移動至座椅,而是座椅會偵測使用者標記或人臉,並向標 記或人臉移動,進而使座椅移動至使用者可乘坐之範圍。期許能協助高齡者與行 動不便者改善其生活上的不便,同時降低其非必要移動時受傷的風險,甚至能減 少醫療資源的使用與花費。此研究未來不只可發展在居家照護方面,也可將其發 展於公眾設施來提升大眾生活的便利性。參考文獻
[1] 陳乾隆、蔡美惠、林金生、林建發、官月蘭、黃景皙,因應人口高齡化問 題作法之探討-以「行動無障礙」為例,T&D 飛訊第 200 期,2014,P.2
[2] Miller, D., Slack, M., 1995. “Design and testing of a low-cost robotic wheelchair prototype,” Autonomous Robots, v. 2, pp. 77-88.
[3] Prassler, E., Scholz, J., and Fiorini, P., 2001. “A robotics wheelchair for crowded public environment,” Robotics & Automation Magazine, IEEE, v. 8, pp. 38-45.
[4] Espinosa F., Lopez E., Mateos R., Mazo M., Garcia R., 2001. “Advanced and intelligent control techniques applied to the drive control and path tracking systems on a robotic wheelchair,” Autonomous Robots, v. 11, pp. 137-148.
[5] Argyros A., Georgiadis P., Trahanias P., Tsakiris D., 2002. “Semi-autonomous navigation of a robotic wheelchair,” Journal Of Intelligent & Robotic Systems, v. 34, pp. 315-329.
[6] Galindo C., Gonzalez, J., Fernández-Madrigal J.A., 2006b. “Control architecture for human–robot integration: application to a robotic wheelchair,” Systems, Man and
Cybernetics, Part B, IEEE Transactions on, v. 36, pp. 1053-1067.
[7] Hon Nin C., Yangsheng Xu, 2006. “Learning human navigational skill for smart wheelchair in a static cluttered route,” Industrial Electronics, IEEE Transactions on, v. 53, pp. 1350-1361.
[8] Zeng Q., Teo CL., Rebsamen B., Burdet E., 2008. “A collaborative wheelchair system,” Neural Systems and Rehabilitation Engineering, IEEE Transactions on, v. 16, pp. 161-170.
[9] 鄧翔之,滑鼠滾輪重心偏移檢測系統之設計與製作,逢甲大學機械與電腦輔 助工程學系碩士班,碩士論文,2014
[10] 林其禹、郭重顯、邱士軒、李敏凡、范欽雄、林伯慎,智慧型機器人:原理 與應用,2013,P.334-P.335
[11] 洪育聖,特定目標追蹤系統,逢甲大學自動控制工程學系專題製作,專題論 文,2009 [12] 梁振升,以 OpenCV 實現即時之人臉偵測與辨識系統,銘傳大學電腦與通訊 工程學系,碩士學位論文,2010 [14] 黃翊庭、潘王翔,使用深度感測器之視障導引輔助系統,台北科技大學資訊 工程學系,專題報告,2011 [15] 呂木村、孔令維、林資竣,結合 Kinect 之行動推銷機器人,朝陽科技大學資 訊工程系,專題報告,2013
![圖 9 RGBD 影像 1.6 偵測障礙物 為了使座椅機器人能在未知的環境中行走,必須具備避障的基本能力,本計 畫以線段掃描法來偵測路況[13]。此方法的原理是使用三條線段針對畫面 1/3 處 地面進行掃描,分別為左中右三段,透過回傳每點的深度可顯示成一張連續深度 剖面資訊圖如圖 10,經此圖可發現三條線段的平均斜率皆會介於 8.5~1.5 之間, 將此平均斜率範圍設為無障礙可安全行走之正常範圍。當任一線段平均斜率變化 超過正常範圍,代表該線段有障礙物為不可行走之路段,藉此判斷是否可以行 走,有無障礙物](https://thumb-ap.123doks.com/thumbv2/9libinfo/7432101.107880/12.892.185.759.109.322/線段平均斜率皆會介於之間將此平均斜率範圍設為任一線段平均礙物.webp)
