國 立 交 通 大 學
電機與控制工程學系
碩士論文
四輪轉向實驗車輛的建構與控制之研究
A Study on Construction and Control of a Four-Wheel-Steer
Experimental Vehicle
研 究 生:林毅泓
指導教授:蕭得聖 博士
四輪轉向實驗車輛的建構與控制之研究
A Study on Construction and Control of a Four-Wheel-Steer
Experimental Vehicle
研 究 生:林毅泓
指導教授:蕭得聖 博士
Student:Yi-Hong
Lin
Advisor:Dr. Te-Sheng Hsiao
國立交通大學
電機與控制工程學系
碩士論文
A Thesis
Submitted to Department of Electrical and Control Engineering College of Electrical Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
In
Electrical and Control Engineering September 2008
四輪轉向實驗車輛的建構與控制之研究
學生:林毅泓
指導教授:蕭得聖博士
國立交通大學電機與控制工程學系碩士班
摘要
本研究建立了一台四輪轉向實驗車輛,並利用此實驗平台估測轉移函數以及設計 控制器。文中提出的控制器可以使實驗車輛之側向加速度及旋轉速度追隨一組參考訊 號。為了使控制器設計過程更為簡單,首先將車輛的轉移函數解耦合為兩個單輸入單 輸出系統,並透過幾個初步實驗了解感測器特性與車輛動態,實驗結果將一併考慮入 控制器設計的過程。將控制器套入實驗平台可以發現,側向加速度與旋轉速度實驗值 的頻率與參考訊號相當接近,但實驗值的增益卻比參考訊號大。調整控制器增益後, 實驗數據顯示,側向加速度與旋轉速度實驗值增益與參考值之間的誤差小於原本的控 制器,實驗值的頻率與參考訊號仍幾乎相同,且於其他頻段也沒有出現異常的峰值。 由實驗結果可知,使用調整增益前後之控制器,實驗平台的側向加速度與旋轉速度都 有出現追隨參考訊號的趨勢。A Study on Construction and Control of a Four-Wheel-Steer Experimental
Vehicle
Student : Yi-Hong Lin
Advisor : Dr. Te-Sheng Hsiao
Department of Electrical and Control Engineering
Nation Chiao Tung University
ABSTRACT
This study sets up a four-wheel-steer experimental vehicle, experimentally evaluates transfer functions, and designs controllers on this experimental platform. The controllers presented in this thesis can make lateral acceleration and yaw rate of the experimental vehicle follow reference signals. In order to simplify the controller design process, first, the transfer functions of vehicle would be decoupled into two single-input single-output systems. The characteristics of sensors and vehicle dynamics are investigated through several preliminary experiments. These experimental results are taken into consideration in the controller design process. According to the controller experimental results, frequency of lateral acceleration and yaw rate are really similar to the frequency of reference signals, but the gains of experimental values are larger than reference signals’. After adjustment of the controller gain, experimental data show that the errors between experimental and reference values are reduced. The frequency of experimental data and reference signals are still almost the same and there are no distinct peaks in other frequencies of experimental data. From the experimental results of before and after the controller gain adjustment, the lateral
誌 謝
首先誠摯的感謝指導教授蕭得聖博士,老師悉心的指導使我得以一窺4WS 車輛控 制領域的深奧,不時的討論並指點我正確的方向,讓我在這些年中獲益匪淺,老師對 學問的嚴謹更是我輩學習的典範。同時也要感謝口試委員的批評與建議,讓論文內容 更加充實,並且提點我不少新的研究思維與方式。 感謝 615 的大學長永洲在這兩年給我不少研究上的建議,永洲哥精準的外線投射 以及犀利的假動作都是我學習的好榜樣。感謝AVIR Lab 的同學暉鈞、宗明、昭明,與 SENSE Lab 的同學清彥、昱傑,雖然大家的研究領域有所不同,但在我們共同營造出 615 良好的研究氛圍下,可以朝著相同的目標一起邁進,能和各位在同一間實驗室工作 真是相當幸運,可惜大家一起看的中華棒球隊比賽總是輸多贏少,希望這個現象在我 們畢業後能有所改善。感謝學弟東欣在建構硬體時幫忙我不少,學弟茂樵在程式的編 譯以及我口試期間也提供我甚多的幫助。 另外要感謝我求學時期各個階段的好友,謝謝你們陪我分擔這兩年來研究上的挫 折。特別感謝家人在我求學生涯中一直默默的支持,讓我可以無後顧之憂的從事研究 工作,最後,謹以此文獻給我摯愛的雙親。 林毅泓 謹識 中華民國九十七年九月 新竹 交大目錄
中文摘要...i 英文摘要...ii 致謝...iii 目錄...iv 圖目錄...vii 表目錄...xii 第一章 緒論... 1 1.1 研究背景與動機... 1 1.2 研究目的... 2 1.3 研究貢獻... 2 1.4 論文架構... 2 第二章 相關研究... 4 2.1 腳踏車模型... 4 2.2 4WS 車輛的相關研究... 10 第三章 四輪轉向車輛之設計... 14 3.1 車體 ... 14 3.2 致動器 ... 15 3.2.1 直流馬達 ... 15 3.2.2 伺服機 ... 15 3.3 感測器 ... 17 3.3.1 陀螺儀 ... 173.3.2 加速度計 ... 18 3.3.3 角度電位檢測計 ... 19 3.3.4 編碼器 ... 20 3.4 數位訊號處理器與其他周邊電路 ... 21 3.4.1 數位訊號處理器 ... 21 3.4.2 SD 記憶卡 ... 22 3.4.3 電壓轉換 IC ... 23 3.4.4 抗交疊濾波器(Anti-aliasing filter) ... 23 3.4.5 電源配置 ... 25 3.4.6 完整的硬體控制流程 ... 25 第四章 實驗車輛的轉移函數... 28 4.1 ARX 模型與轉移函數的實驗 ... 28 4.2 整合多筆實驗結果與驗證 ... 34 第五章 控制器設計與實驗... 45 5.1 控制迴路的解耦合 ... 45 5.2 初步實驗... 49 5.2.1 靜態實驗 ... 49 5.2.2 初步的控制器實驗與帶通濾波器設計 ... 51 5.2.3 動態實驗與帶斥濾波器設計 ... 57 5.3 控制器設計與實驗... 60 5.3.1 控制器設計 ... 60 5.3.2 實驗一 ... 66 5.3.3 實驗二 ... 72 5.3.4 實驗數據的分析與討論 ... 81
第六章 結論與未來展望... 83
6.1 結論... 83
6.2 未來展望... 84
參考資料... 86
圖目錄
圖 1 腳踏車模型 ... 4 圖 2 一般車輛輸入對側向加速度轉移函數的波德圖,左、右圖的輸入分別是前、後輪 轉向角度... 8 圖 3 一般車輛輸入對旋轉速度轉移函數的波德圖,左、右圖的輸入分別是前、後輪轉 向角度... 9 圖 4 不同控制器的單位步級響應圖,擷取自[5] ... 10 圖 5 設計K(S)使輸出Β、R可以追隨給定的輸入ΒREF、RREF ... 12 圖 6 一個完整的四輪轉向車輛控制器方塊圖,虛線部分為本論文中所設計的控制器 13 圖 7 TXT-1 ... 14 圖 8 陀螺儀 PR0021 ... 17 圖 9 加速度計 AGB3_V2 ... 18 圖 10 角度電位檢測計 ... 19 圖 11F2812DSP ... 22 圖 12 SD 記憶卡 ... 22 圖 13 抗交疊濾波器電路圖 ... 24 圖 14 放大器電路圖 ... 24 圖 15 抗交疊濾波器串接放大器電路圖 ... 25 圖 16 完整硬體的斜視圖 ... 26 圖 17 完整硬體的側視圖,右方為遙控器 ... 26 圖 18 硬體架構圖 ... 27 圖 19 車速 ... 31 圖 20 前、後輪轉向角度 ... 31 圖 21 旋轉速度與側向加速度 ... 32 圖 22 旋轉速度的量測值與估測值比較 ... 33圖 23 側向加速度的量測值與估測值比較 ... 33 圖 24 T S 、T S 之波德圖 ... 35 圖 25 T S 、T S 之波德圖 ... 35 圖 26 轉移函數驗證 1,實驗的車速 ... 36 圖 27 轉移函數驗證 1,實驗的前、後輪轉向角度 ... 36 圖 28 轉移函數驗證 1,實驗的旋轉速度,實際值與估測值比較圖 ... 37 圖 29 轉移函數驗證 1,實驗的側向加速度,實際值與估 ... 37 圖 30 轉移函數驗證 1,旋轉速度與側向加速度之實驗值與估測值誤差 ... 38 圖 31 轉移函數驗證 2,實驗的車速 ... 39 圖 32 轉移函數驗證 2,實驗的前、後輪轉向角度 ... 39 圖 33 轉移函數驗證 2,實驗的旋轉速度,實際值與估測值比較圖 ... 40 圖 34 轉移函數驗證 2,實驗的側向加速度,實際值與估測值比較圖 ... 40 圖 35 轉移函數驗證 2,旋轉速度與側向加速度之實驗值與估測值誤差 ... 41 圖 36 轉移函數驗證 3,實驗的車速 ... 42 圖 37 轉移函數驗證 3,實驗的前、後輪轉向角度 ... 42 圖 38 轉移函數驗證 3,實驗的旋轉速度,實際值與估測值比較圖 ... 43 圖 39 轉移函數驗證 3,實驗的側向加速度,實際值與估測值比較圖 ... 43 圖 40 轉移函數驗證 3,旋轉速度與側向加速度之實驗值與估測值誤差 ... 44 圖 41 TT R 之波德圖 ... 47 圖 42 TT S R S 之波德圖 ... 48 圖 43 兩個等效的方塊圖。左圖為系統解耦合的流程圖,右圖為前、後輪轉向角度與 輸出之關係... 48 圖 44 前、後輪角度電位檢測計靜態下的輸出 ... 49 圖 45 陀螺儀與加速度計於靜態下的輸出 ... 50
圖 47 初步控制系統的方塊圖 ... 51 圖 48 加入初步控制器後,側向加速度迴路的波德圖 ... 52 圖 49 加入初步控制器後,旋轉速度迴路的波德圖 ... 52 圖 50 初步控制器實驗的車速 ... 53 圖 51 初步控制器實驗的側向加速度與旋轉速度 ... 53 圖 52 初步控制器實驗的前、後輪轉向角度 ... 54 圖 53 BP1 的波德圖 ... 55 圖 54 BP2 的波德圖 ... 55 圖 55 新的控制系統方塊圖 ... 56 圖 56 動態實驗的車速 ... 57 圖 57 動態實驗的前、後輪轉向角度、旋轉速度與側向加速度 ... 57 圖 58 動態實驗的旋轉速度與側向加速度頻譜 ... 58 圖 59 動態實驗的側向加速度頻譜放大圖 ... 58 圖 60 NH 的波德圖 ... 59 圖 61 具帶斥濾波器與帶通濾波器的控制系統方塊圖 ... 59 圖 62 具前饋控制器與回授控制器之系統方塊圖 ... 60 圖 63 側向加速度迴路之閉路系統波德圖 ... 61 圖 64 旋轉速度迴路之閉路系統波德圖 ... 62 圖 65 輸入參考訊號為 0.6HZ之側向加速度與旋轉速度模擬圖 ... 63 圖 66 輸入參考訊號為 0.6HZ之前、後輪轉向角度模擬圖 ... 63 圖 67 輸入參考訊號為 0.7HZ之側向加速度與旋轉速度模擬圖 ... 64 圖 68 輸入參考訊號為 0.7HZ之前、後輪轉向角度模擬圖 ... 64 圖 69 輸入參考訊號為 0.9HZ之側向加速度與旋轉速度模擬圖 ... 65 圖 70 輸入參考訊號為 0.9HZ之前、後輪轉向角度模擬圖 ... 65 圖 71 輸入參考訊號頻率 0.6HZ,前、後輪轉向角度實驗值 ... 66
圖 72 輸入參考訊號頻率 0.6HZ,側向加速度與旋轉速度之參考值與實驗值 ... 66 圖 73 輸入參考訊號頻率 0.6HZ,側向加速度與旋轉速度之頻譜 ... 67 圖 74 輸入參考訊號頻率 0.6HZ,實驗值與參考訊號誤差比較圖 ... 67 圖 75 輸入參考訊號頻率 0.7HZ,前、後輪轉向角度之實驗值 ... 68 圖 76 輸入參考訊號頻率 0.7HZ,側向加速度與旋轉速度之參考值與實驗值 ... 68 圖 77 輸入參考訊號頻率 0.7HZ,側向加速度與旋轉速度之頻譜 ... 69 圖 78 輸入參考訊號頻率 0.7HZ,實驗值與參考訊號誤差比較圖 ... 69 圖 79 輸入參考訊號頻率 0.9HZ,前、後輪轉向角度之實驗值 ... 70 圖 80 輸入參考訊號頻率 0.9HZ,側向加速度與旋轉速度之參考值與實驗值 ... 70 圖 81 輸入參考訊號頻率 0.9HZ,側向加速度與旋轉速度之頻譜 ... 71 圖 82 輸入參考訊號頻率 0.9HZ,實驗值與參考訊號誤差比較圖 ... 71 圖 83 調整控制器增益後,輸入頻率 0.6HZ的參考訊號1,其側向加速度與旋轉速度之 參考值與實驗值... 72 圖 84 調整控制器增益後,輸入頻率 0.6HZ的參考訊號1,其側向加速度與旋轉速度之 頻譜... 73 圖 85 調整控制器增益後,輸入頻率 0.6HZ的參考訊號1,實驗值與參考訊號誤差比較 圖... 73 圖 86 調整控制器增益後,輸入頻率 0.7HZ的參考訊號1,其側向加速度與旋轉速度之 參考值與實驗值... 74 圖 87 調整控制器增益後,輸入頻率 0.7HZ的參考訊號1,其側向加速度與旋轉速度之 頻譜... 74 圖 88 調整控制器增益後,輸入頻率 0.7HZ的參考訊號1,實驗值與參考訊號誤差比較 圖... 75 圖 89 調整控制器增益後,輸入頻率 0.9HZ的參考訊號1,其側向加速度與旋轉速度之 參考值與實驗值... 75
圖 90 調整控制器增益後,輸入頻率 0.9HZ的參考訊號1,其側向加速度與旋轉速度之 頻譜... 76 圖 91 調整控制器增益後,輸入頻率 0.9HZ的參考訊號1,實驗值與參考訊號誤差比較 圖... 76 圖 92 調整控制器增益後,輸入頻率 0.6HZ的參考訊號2,其側向加速度與旋轉速度之 參考值與實驗值... 77 圖 93 調整控制器增益後,輸入頻率 0.6HZ的參考訊號2,其側向加速度與旋轉速度之 頻譜... 77 圖 94 調整控制器增益後,輸入頻率 0.6HZ的參考訊號2,實驗值與參考訊號誤差比較 圖... 78 圖 95 調整控制器增益後,輸入頻率 0.7HZ的參考訊號2,其側向加速度與旋轉速度之 參考值與實驗值... 78 圖 96 調整控制器增益後,輸入頻率 0.7HZ的參考訊號2,其側向加速度與旋轉速度之 頻譜... 79 圖 97 調整控制器增益後,輸入頻率 0.7HZ的參考訊號2,實驗值與參考訊號誤差比較 圖... 79 圖 98 調整控制器增益後,輸入頻率 0.9HZ的參考訊號2,其側向加速度與旋轉速度之 參考值與實驗值... 80 圖 99 調整控制器增益後,輸入頻率 0.9HZ的參考訊號2,其側向加速度與旋轉速度之 頻譜... 80 圖 100 調整控制器增益後,輸入頻率 0.9HZ的參考訊號2,實驗值與參考訊號誤差比 較圖... 81 圖 101 結合駕駛人輸入的四輪轉向控制器方塊圖 ... 84
表目錄
表 1 3557C-006C 的特性 ... 15 表 2 伺服機 DS-1015 與 S3003 的特性 ... 16 表 3 陀螺儀 PR0021 的特性 ... 18 表 4 加速度計 AGB3_V2 的特性 ... 19 表 5 角度電位檢測計的特性 ... 20 表 6 編碼器的特性 ... 20 表 7 電壓轉換IC 的特性 ... 23 表 8 15 次實驗求得的轉移函數... 88第一章 緒論
1.1 研究背景與動機
隨著車用電子技術蓬勃發展,人們對於車輛的要求不再只是普通的載具,車輛配 備各種不同的電子控制系統於今日的市場已是常態。常見的車輛控制系統如早期的牽 引力控制、省油技術,至近年來的車輛動態控制,例如防鎖死剎車系統、動態懸吊系 統以及四輪轉向車輛,這些技術可以大幅提升駕駛人行車的舒適度與安全性。 近年來電子訊號操控(SBW,steer-by-wire)[1]技術也被應用於車輛系統,有別於傳 統車輛的設計,利用電子訊號操控技術可以省略許多占空間的機械連桿,例如一般車 輛方向盤與前輪的轉向機制是利用機械式的連桿連接,SBW 系統則可以使用訊號線甚 至是無線傳輸的方式傳遞訊號控制提供轉向角度的致動器,如此不但節省空間,亦可 避開車禍事故發生,控制轉向連桿對駕駛者的潛在威脅。四輪轉向(4WS,4-wheel-steer) 車輛應用於SBW 系統可以有很好的發揮空間,利用 SBW 節省車體空間的特性,使後 輪擁有更大的轉動角度。 4WS 最初的想法是為了減少車輛轉彎半徑,隨著電腦與感測器技術不斷進步,進 而希望4WS 提供駕駛人更多幫助,相較於二輪轉向的傳統車輛,4WS 車輛有較好的操 控性,例如車輛在高速過彎時,駕駛者與乘客感受會比2WS 穩定、舒適,於緊急避障 時,4WS 可以提供較小的迴轉半徑使車輛的動態更加快速與敏捷,減少車禍發生的可 能性。 目前市面上已可見 4WS 車輛的蹤跡,然而受到硬體限制,其後輪只能做小幅度的 轉動,為了更貼近真實車輛的情形,本研究實現一台SBW 的四輪轉向車輛,其前後輪 轉向幅度皆可達正負35 度,並利用此實驗平台驗證控制器的效能。1.2 研究目的
建立一架4WS 車輛,以此實驗平台為基礎下,完成以下目的。 1.利用實驗方法求得代表此實驗平台的數學模型。 2.設計控制器,使車輛行進間,轉軸垂直於地面的車輛旋轉速度及側向加速度可以追隨 一組給定的參考訊號。 3.於實驗平台上驗證控制器的效能。1.3 研究貢獻
本研究首先建立一架4WS 車輛,配備相關的感測器、致動器,控制器則採用高效 能的數位訊號處理晶片,此實驗平台為後續控制器設計之相關研究提供一個良好的驗 證方式。 設計控制器控制車輛側向及旋轉方向的動態,使車輛於行進間其旋轉速度與側向 加速度可以追隨一組給定的參考訊號,並套用於實驗平台上,驗證控制器效能。1.4 論文架構
論文各章節的編排如下: 第一章 緒論:描述研究背景、動機與目的。 第二章 相關研究:此章節首先介紹一個常用來描述車輛動態的模型,並探討四輪轉向 車輛控制器設計的相關研究。 第三章 四輪轉向車輛設計:介紹實驗平台使用的致動器、感測器、控制器及其他相關 電路和電源配置。第四章 實驗車輛的轉移函數:敘述如何求得代表實驗平台的數學模型。 第五章 控制器設計與實驗:說明控制器設計的流程以及套用於實驗平台驗證的結果。 第六章 結論與未來工作:總結本研究並提出未來更能深入發展的方向。
第二章 相關研究
現今有不少車輛相關的研究著重於在安全的前提下提高車輛響應的速度,例如防 鎖死剎車系統、動態懸吊系統等。4WS 系統可以同時控制車輛側向與旋轉方向的動態, 不僅增進響應速度,且維持行車的穩定性和安全性。 本章節首先介紹一個常用來描述車輛動態的線性模型,稱為腳踏車模型(bicycle model),此模型是描述車輛的側向運動以及轉軸垂直於地面的旋轉運動。第二節探討 4WS 車輛的相關研究以及各種控制器的設計方法。2.1 腳踏車模型
車輛的腳踏車模型(bicycle model)是利用二輪模型(或稱 single-track model[2])描述 車輛左(右)半面的動態。以下推導過程與方向定義皆參照[3]。
圖 1 腳踏車模型
腳踏車模型的參數: F : 前輪側向力 F : 後輪側向力 CG: 質心位置 r: 旋轉速度 β: 質心側滑角度 β : 前輪側滑角度 β : 後輪側滑角度 ν: 車輛速度 ν : 前輪軸速度 ν : 後輪軸速度 ν : 側滑速度 ν : 直行速度 α : ν 與 x 軸夾角 α : ν 與 x 軸夾角 δ : 前輪轉向角度 δ : 後輪轉向角度 l : 前輪軸至質心距離 l : 後輪軸至質心位置 a : 側向加速度 車輛參數: M: 車體重量 IZ: 對 z 軸的車輛轉動慣量 C : 前輪的轉向弳度 C : 後輪的轉向弳度 l: l l 參照圖1,本論文中定義δ 、δ 轉向 x 軸左半面為正,ν 朝 x 方向為正,a 、ν 朝 y 軸方向為正,z 軸面對地面逆時針方向旋轉 r 為正。 忽略車輛滾動(roll)與前後傾(pitch)的動態,並假設各個角度皆為小角度,考慮 y 方向力 平衡,車體所受的側向力為前、後輪之側向力和,由於車輛左右對稱且前、後輪轉向 角皆為小角度,故y 方向力平衡可由下式表示 F 2F 2F (1) 當側滑角度為小角度時,前、後輪之側向力可由下面的線性關係式表示: F C β (2) F C β (3)
其中, β δ α δ (4) β δ α δ (5) 將(2)、(3)、(4)、(5)式帶入(1)中 得F 2C δ ν ν 2C δ ν ν M a 2C δ ν ν 2C δ ν ν M ν ν r 2C δ ν ν 2C δ ν ν ν CMν C ν CMν C ν r MC δ MC δ (6) 考慮對z 軸的力矩平衡,由圖 1 可知,前輪側向力提供車輛逆時針方向力矩,後輪側 向力則提供車輛順時針方向力矩,由於車輛左右對稱,故z 軸力矩平衡可表示為下式: τ 2F l 2F l (7) 將(2)、(3)、(4)、(5)式帶入(7)中 得I r 2C δ ν ν l 2C δ ν ν r CI ν C ν C I ν C r CI δ CI δ (8) 整理(6)、(8)式 ν r C C Mν C C Mν ν C C I ν C C I ν ν r C M C M C I C I δ δ (9) 令A C C ν C C Mν ν C C I ν C C I ν B= C M C M C C
狀態變數X 輸出Y νr 輸入U δ δ 當車輛定速行駛時,ν 為常數,則輸入輸出關係可表示為: Y C sI A BU,C 1 00 1 ν s r s C M C M ν I ν C M C M ν I ν C I C Mν C I C Mν ∆ δ s δ s (10) 其中,∆ s s ν C C M C C I s C C MI ν C C I (11) 由圖1 得知,β ,代入(10)式可得輸入與側滑角度的關係,側滑角度大小表示車輛 行駛的穩定性,於正常行駛的情況下希望側滑角度越小越好,然而現今仍沒有感測器 可以偵測車輛的側滑速度,故側滑角度也無法直接量到,考慮實際硬體架構,將側向 動態部分的輸出改由側向加速度代替。 考慮輸入對側向加速度a 的關係: a ν ν r 由(9)可知 ν CMν C ν CMν C ν r MC δ MC δ a CMν C ν CMν C r MC δ MC δ (12)
結合(10)與(12)式 a s ∆ MC s I νC s IC δ s MC s I νC s IC δ s (13) 由(10)與(13)式可以得到輸入δ 、δ 與輸出a 、r 之間的轉移函數 a s r s ∆ C M s C I ν s C I C M s C I ν s C I C I s C Mν C I s C Mν δ s δ s (14) 在此,將[4]文中提到的車輛參數代入(14)式,藉此觀察一般車輛轉移函數的波德圖。 車輛參數: M 1310kg I 2352kg m C 77350 N rad⁄ C 51600 N rad⁄ l 0.986m l 1.596m 假設車速=12m s⁄ 圖 2 一般車輛輸入對側向加速度轉移函數的波德圖,左、右圖 的輸入分別是前、後輪轉向角度
圖 3 一般車輛輸入對旋轉速度轉移函數的波德圖,左、右圖的 輸入分別是前、後輪轉向角度 當車速越快時,輸入對側向加速度轉移函數之低頻增益會逐漸變高,高頻增益則變化 不大,而輸入對旋轉速度轉移函數之低頻增益也會提高,但頻寬會降低。圖3 中,車 速12m/s 時,前、後輪對旋轉速度系統之頻寬約為 2.4Hz,當車速提高至 32m/s,兩系 統頻寬皆降至約1.1Hz。
2.2 4WS 車輛的相關研究
1 Nissan 於 1985 年裝置了一套 4WS 系統於房車上實驗,此系統稱為 HICAS(High Capacity Actively-controlled Suspension)[5],目的是降低車輛質心位置的側滑角度以 增進車輛的操控性能,並希望前輪轉向角度對於旋轉速度的增益能較平滑且有較 大的頻寬,HICAS 選用一階延遲系統為後輪轉向的控制器,1989 年,Nissan 推出 新一代4WS 系統,稱 Super HICAS,選用相位反轉控制器,並套用於 Nissan 天際 線(Sky-line)跑車實驗,相位反轉控制器除了降低側滑角度更能大幅改善車輛於轉 彎時的響應。比較2WS、HICAS 與 Super HICAS 的實驗結果,Super HICAS 在旋 轉速度的頻率響應擁有較平緩的增益且頻寬最大,而2WS 系統的頻寬則最小。下 圖是三個不同控制器的單位步級響應圖。 圖 4 不同控制器的單位步級響應圖,擷取自[5] 由圖可知,Super HICAS 估測得側滑角度小於其他兩者,而 2WS 的車輛側滑角度 是三者中最大的,故4WS 車輛不論在旋轉速度的頻寬表現或側滑角度的評估皆優 於2WS 車輛,然而當時受限於感測器的技術,HICAS 與 Super HICAS 皆為開迴路
2. Yoshimi Furukawa、Naohiro Yuhara 等人於[6]文中提到 4WS 車輛關於減少側滑角度 的控制器設計。 考慮輸入對側滑角度的轉移函數,設計一個比例控制器K: K M C ν M C ν δ Kδ (15) 代入轉移函數則可以發現,車輛側滑角於穩態響應皆可保時為零。 將上述的比例控制器改為一階系統[7]: δ M C I C M C I C δ (16) 代入轉移函數中得知,車輛側滑角度不論是暫態或是穩態的響應皆可以保持為零。 不同於(15)、(16)從轉移函數觀點設計的控制器,[8]文中提出兩個新的設計概念: (a)當方向盤快速轉向時,後輪轉向角度應與前輪相反,使車輛作較劇烈的動作, 例如車輛的緊急避障行為。 (b)當方向盤緩慢轉向時,後輪轉向角度應與前輪相同,幫助穩定車輛的動態,例 如車輛高速行駛時的轉向行為。 此控制準則可表示如下: δ s K TK δ s (17) 將(17)式的控制器套入實車,於車道變換實驗中,配載控制器的 4WS 車輛可降低變換 車道後的”魚擺現象”(fishtailing),故 4WS 較 2WS 車輛更快到達穩定的狀態。 上述的控制器僅針對減少側滑角度設計,並沒有結合旋轉方向的動態控制,是屬 於較早期的研究。 3. Miguel A. Vilaplana 等人於文[9]中提出一個控制車輛側滑角度及旋轉速度的控制 器,透過回授旋轉速度及車速,將原本多輸入多輸出的系統解耦合為兩個單輸入單輸 出系統,即可以分別對這兩個單獨的迴路設計控制器,文中分別利用I 控制器、PI 控
制器完成側滑角度與旋轉速度的控制,其目的是希望車輛的側滑角與旋轉速度可以追 隨一組給定的參考訊號。 圖 5 設計K(s)使輸出β、r 可以追隨給定的輸入β 、r ,G(s)為車輛的轉移函數,本圖引用自[9]文 利用上述的控制器,Vilaplana 在文[10]中還考慮了致動器飽和的問題,於後輪控制的部 分加入反積分終結器,更符合實際車輛的使用。 4. P.Raksincharoensak 等人於文[11]中提出 4WS 車輛的車道保持(lane-keeping)控制, 並透過模擬方式驗證。其控制器包含三個部分:前饋控制器、回授控制器與車道保持控 制器,前饋控制器是根據駕駛人輸入的方向盤角度求得一組理想的側滑角度與旋轉速 度參考值,故前饋控制器應隨著行車情況不同而改變,文中依據側滑角為零以及側向 加速度響應沒有相位落後這兩種情況設計兩個不同的前饋控制器。回授車輛實際動態 與參考值比較後,透過回授控制器計算可得到車輛前、後輪應補償的轉向角度,使車 輛的實際動態追隨理想的參考值動作,文中還提到利用卡曼濾波器與CCD 相機估測道 路的曲率,並透過車道保持控制器求得理想的方向盤角度,使車輛可以行駛於固定車 道。 5. Masao Nagai 等人於文[12]中設計的控制器是利用後輪轉向與補償旋轉力矩的方式 控制車輛的側滑角度與旋轉速度。不同於上述研究利用前、後輪轉向控制車輛動態, 文中假設車輛各個輪胎狀態可以獨立操控,針對個別輪胎剎車或加速即可以提供車輛
旋轉方向的力矩,透過額外的力矩補償與後輪轉向,使車輛側滑角度與旋轉速度可以 追隨給定的參考值,文中還套用三種不同的非線性輪胎模型,以模擬的方式驗證控制 器效能與強健度。 上述設計的控制器使輸出訊號可以追隨給定的參考值,其控制流程都必須回授兩 個車輛的狀態值,考慮實際情形,裝置陀螺儀可測得車輛的旋轉速度,而側滑角度的 部分無法由感測器直接量測,必須設計觀察器估測。回顧文[11],前輪轉向角度經前饋 控制器可以求得車輛旋轉速度與側向加速度的參考訊號,並透過回授控制器使車輛的 側向與旋轉方向的動態可追此隨參考訊號,算是較完整的四輪轉向車輛控制器。然而[9]、 [10]、[11]、[12]文皆是利用模擬的方式驗證控制器效能,故無法得知實際硬體實驗時, 透過觀察器估測車輛側滑角度之效果。下圖6 為一個完整的四輪轉向控制器方塊圖, 不同於[11]文,其側向動態輸出是以車輛的側向加速度取代側滑角度。θ 為駕駛人輸入 的方向盤角度,K s 、K s 這兩個控制器應隨著行車情形而改變,以產生符合各種不 同車況之參考訊號,透過控制器K(s),車輛的側向加速度與旋轉速度可以追隨計算出 的參考訊號,藉此提升行車的舒適度與安全性。本論文提出的控制器為圖6 中的 K(s), 並套用於實驗平台,以實驗的方式驗證圖中虛線部分的控制流程。 1 K ( s ) 2 K ( s )
K ( s )
G ( s )
− − fθ
y _ r e f a _ r e f r y a r 圖 6 一個完整的四輪轉向車輛控制器方塊圖,虛線部分為本論文中所設計的控制 器第三章 四輪轉向車輛之設計
本論文實現一台四輪轉向車輛以驗證控制器之效能,車輛主要是改裝自遙控模型 車,其前、後輪皆可裝上伺服機控制轉向,根據腳踏車模型(bicycle model),在車輛行 進的過程中需知道轉軸垂直於地面的車輛旋轉速度以及側向加速度,因此,載具需配 備陀螺儀及加速度計,實驗時希望車輛維持一定的速度,所以在馬達後方加裝角度編 碼器得到車速的資訊,控制的部分則是利用DSP 晶片實現,透過濾波器及變壓 IC 分別 與感測器和致動器相連結,同時將感測器量得數據傳至SD 記憶卡供後續分析。3.1
車體
採用田宮(TAMIYA)系列遙控車 TXT-1,TXT-1 是 1/10 實車縮小比例的四輪傳動遙 控車,配備多連桿懸吊系統,其前後輪皆可裝上伺服機控制轉向,車體長510mm,寬 385mm,高 297mm,前後輪軸距 330mm,輪胎直徑為 165mm,馬達至輪軸的齒輪比 為34:1,透過伺服機控制前進後退,具三種不同速度。 圖 7 TXT-13.2
致動器
實驗平台的致動器有直流馬達和伺服機,直流馬達為車輛的動力來源,而伺服機 則控制前、後輪轉向角度和車輛速度。3.2.1 直流馬達
TXT-1 的動力是由直流馬達提供,由於 TXT-1 原廠配備的直流馬達軸心長度不夠 而無法加裝編碼器,因此改用FAULHABER 系列 3557 型 006C 直流馬達,供給電壓 6V, 扭力為40N-m,馬達後方的軸心長達 3.5mm,可以掛載編碼器。 表 1 3557C-006C 的特性 電壓 6V 最大扭力 40N-m 輸出功率 14.5W 無負載下轉速 4700rpm 無負載下電流 0.17A 最大轉速 5000rpm 最大電流 3.4A3.2.2 伺服機
TXT-1 可配備三個伺服機,其中兩個伺服機分別控制前後輪的轉向,另一個則是 控制TXT-1 前行與後退速度。轉向部分的伺服機是採用雷虎 DS-1015,供給電壓 4.8~6V,6V 時最大扭力為 14.5kg-cm。FUTABA S3003 則控制車速,操控者透過遙控器改變 S3003 位置,當S3003 轉至不同位置會改變電流流至馬達的路徑,不同的路徑有不同的電阻, 因此控制S3003 的位置可改變直流馬達的供給電壓,使 TXT-1 產生不同的速度。 表 2 伺服機DS-1015 與 S3003 的特性 DS-1015 S3003 大小 41.8×20.6×39.6(mm) 40.4×19.8×36(mm) 重量 66g 37.2g 電壓 4.8~6V 4.8~6V 最大扭力 14.5kg-cm(6V) 3.2kg-cm(4.8V)
3.3
感測器
為了貼近一般車輛不足轉向(under-steer)[13]的特性,透過配重,使實驗平台的質心 座落於車輛中心點朝前輪方向1cm 左右,並加裝加速度計與陀螺儀量測質心位置的側 向加速度和旋轉速度,在伺服機下方裝置角度電位檢測計可以量得前、後輪轉向角度, 編碼器則掛載於直流馬達後方,用以估測車輛的速度。3.3.1 陀螺儀
使用單軸陀螺儀PR0021,其核心晶片為 ADXRS300[14],可量測至 300 度/秒, 輸出為類比訊號,操作電壓為4.75V~5.25V,靈敏度約為 5mV/度/秒,用以量測車輛的 旋轉速度。 V : 感測器輸出的電壓(V) V : 物理值為零時感測器的輸出電壓(V) 旋轉速度r V . V 度 秒 (18) 圖 8 陀螺儀PR0021表 3 陀螺儀PR0021 的特性
3.3.2 加速度計
三軸加速度計AGB3_V2[15],與陀螺儀相同皆為類比訊號方式輸出,靈敏度為 800mV/G, 操作電壓3.3V,可量測車輛的側向加速度。 側向加速度a V . V G (19) 圖 9 加速度計AGB3_V2 量測範圍 ±300 度/秒 靈敏度 5mV/度/秒 頻寬 0.04kHz 操作電壓 4.75~5.25V 消耗電流 6mA 輸出範圍 0.25~4.75V 大小 18×18(mm)表 4 加速度計AGB3_V2 的特性
3.3.3 角度電位檢測計
使用兩個角度電位檢測計分別固定於前、後輪轉向伺服機的下方,量測前、後輪 轉向角度。MIDORI 系列的 QP-2H 可以量測±45 度,操作電壓為 4.5~5.5V,輸出為類 比訊號,其靈敏度為44mV/度。 前(後)輪角度δ δ V . V 度 圖 10 角度電位檢測計 量測範圍 ±1.5G 靈敏度 800mV/G 頻寬 0.35kHz 操作電壓 3.3V 消耗電流 7mA 輸出範圍 3V(最大) 大小 15×13(mm)表 5 角度電位檢測計的特性
3.3.4 編碼器
搭配直流馬達 3557C,編碼器使用FAULHABER 系列的 HEDS5500,輸出為高 4V 低0.4V 的方波訊號,操作電壓 4.5~5.5V,可量測至 0.18 度,編碼器提供 3557C 的旋 轉角度,馬達角度經一次差分後可得馬達轉速,再乘以齒輪比與輪胎直徑換算得車輛 行駛速度。 表 6 編碼器的特性 精確度 0.18 度 操作電壓 4.5~5.5V 消費電流 17mA 頻寬 100kHz 輸出 0.4~4V 方波 量測範圍 ±45 度 靈敏度 44mV/度 操作電壓 4.5~5.5V 消耗電流 10mA 輸出範圍 (0.1~0.9)×Vcc(操作電壓)3.4 數位訊號處理器與其他周邊電路
本節介紹的數位訊號處理器為實驗平台之硬體控制器,然而欲達到接收資訊與發 送控制命令則必須藉由某些周邊電路方能與感測器、致動器溝通。利用SD 卡儲存各個 感測器的實驗數據可使後續的資料分析更為方便。3.4.1 數位訊號處理器
本論文使用DSP 晶片是德州儀器公司 TMS320 系列 F2812[16],運算速度為 150MHz,晶片裝置於美商 Spectrum Digital 所生產的eZdspTM F2812[17]開發板,操作電壓為5V,並利用德州儀器提供的C2000 工具軟體 Code Composer driver[18]完成程式 的編譯與除錯。設計完成之控制器程式碼將燒入於DSP 快閃記憶體,實驗時利用 DSP 的12bit 類比-數位轉換(ADC)接收類比訊號輸出的感測器資訊,並且送出 PWM 訊號控 制致動器,而編碼器訊號可由DSP 上的解碼電路(QEP)取得,並透過串列匯流排(SPI), 將所有感測器數據傳送至SD 卡儲存。然而實際架構時發現,DSP 的輸入、輸出訊號範 圍皆是0~3.3V,須通過升、降壓電路方能與編碼器、伺服機溝通,而類比訊號在進入 ADC 前必須先通過抗交疊濾波器(Anti-aliasing filter),於以下的小節中,會持續介紹這 些相關的電路。
圖 11 F2812 DSP
3.4.2 SD 記憶卡
SD 記憶卡[19]是一種低成本的資料平台和通訊介面,利用串列匯流排傳輸其頻率 可達20MHz,操作電壓為 2.7V~3.6V,寫/讀電流只有 27mA 與 23mA,功率很低。SD 記憶卡最基本的儲存單位為8bit(0~255)的位元組,若超過 255 的數字則必須占用兩個 儲存單位以16bit(0~65535)來表示,SD 卡中每 512 個位元組構成一個區塊(sector),在 每次讀/寫時會處理一整個區塊的資料,此為讀/寫的基本單位。實驗時,由感測器得到 車輛前、後輪轉向角度,車輛旋轉速度、側向加速度以及行進速度,將這些資訊一併 寫入SD 卡中,透過 MATLAB 的分析,即可知道車輛行進間的各個狀態。 圖 12 SD 記憶卡3.4.3 電壓轉換 IC
由於編碼器輸出為高4V 低 0.4V 的方波訊號,而 DSP 輸入與輸出訊號最高為 3.3V, 故編碼器須透過一個降壓IC 方能與 DSP 連接,在此,使用德州儀器出產的 AM26LV32C 這顆IC 完成此項工作,AM26LV32C 操作電壓為 3.3V,允許輸入範圍-0.3V~5.5V,輸 出邏輯高電位是3.3V,頻寬為 32MHz。同樣的,DSP 輸出邏輯高電位 3.3V 的 PWM 訊號亦須透過HC541 這顆 IC 將邏輯高電位升至 5V 才能控制伺服機,HC541 也是德州 儀器公司出產,操作電壓為2~6V,輸入範圍亦是 2~6V,HC541 可將輸入訊號的邏輯 高電位轉成操作電壓,因此,使用HC541 的操作電壓與伺服機同為 5V。 表 7 電壓轉換 IC 的特性 AM26LV32C HC541 操作電壓 3.3V 2~6V 輸入 -0.3~5.5V 2~6V 輸出 3.3V Vcc(操作電壓)3.4.4 抗交疊濾波器(Anti-aliasing filter)
本論文使用二階低通巴特沃茲濾波器(Butterworth filter)來實現抗交疊濾波器,類 比訊號輸出的感測器有四個,因此共需要四組抗交疊濾波器與DSP 連接, 然而陀螺儀及兩個角度電位檢測器的輸出電壓最高可達4.5V,所以與這三個感測器連 接的抗交疊濾波器後方需再串接一個增益約為0.6 倍的放大器,其電路圖如下。圖 13 抗交疊濾波器電路圖 R=1MΩ 可變電阻 C2=2C1,C1=0.47µF 截止頻率ω √ 在此,可變電阻調為0.1MΩ,故ω 15.045 rad/s 2.39Hz 圖 14 放大器電路圖 放大電路增益G 0.593
圖 15 抗交疊濾波器串接放大器電路圖
3.4.5 電源配置
實驗平台共配載了五顆電池,電池1 為輸出 5V 之鋰電池,作為 DSP 開發板的供 給電源。電池2 為 7.2V 之鎳氫電池,用來推動實驗平台上的直流馬達。電池 3、4、5 皆為4.8V 之鎳氫電池,其中,角度編碼器與控制轉向的伺服機將使用電池 3 為供給電 源,而電池4、5 將串聯使用,並且使串連後的電壓中位、電池 3 之地電位和 DSP 開發 板之地電位互相連接,故電池4 提供實驗平台-4.8V~0V 之電位,電池 5 則提供 0V~4.8V 之電位,-4.8V 與 4.8V 將供給抗交疊濾波器與放大電路中的運算放大器使用,由於電 池5 與 DSP 開發版之地電位相同,故陀螺儀、加速度計、兩個角度電位檢測計與轉壓 IC 之電源皆使用電池 5。3.4.6 完整的硬體控制流程
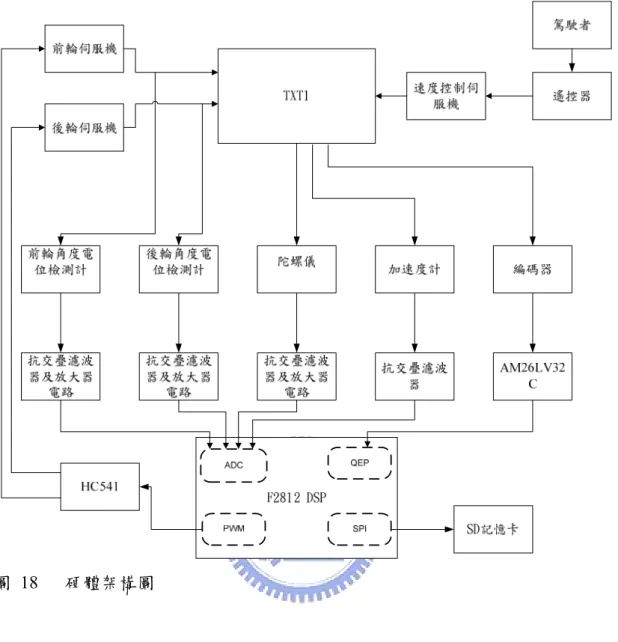
將上述的致動器、感測器、DSP 與相關電路安裝至 TXT1 並完成電源配置後,於TXT1 行駛的同時,加速度計、陀螺儀與角度電位檢測計的訊號通過抗交疊濾波器後由 DSP 的 ADC 取得,而編碼器的訊號則先通過 AM26LV32C 後進入 DSP。取得車輛的側 向加速度、旋轉速度、車速及前後輪轉向角度等資訊後,DSP 的工作一方面將這些感 測器量得的值傳進SD 記憶卡儲存,一方面將值代入燒錄於 DSP 的控制器計算得到前 後輪轉向角,並發出PWM 訊號通過 HC541 以控制伺服機。 圖 16 完整硬體的斜視圖 圖 17 完整硬體的側視圖,右方為遙控器
第四章 實驗車輛的轉移函數
本章節敘述如何透過實驗的方式尋找實驗平台的轉移函數,實驗使用第三章建構 完成的硬體定速行駛於固定材質的路面,並記錄輸入(前、後輪轉向角度)和輸出(側向 加速度、旋轉速度)資料,由於感測器輸出帶有一定程度的雜訊,故利用 ARX 模型配 合最小平方法求得輸入與輸出之間的關係,透過Matlab 程式 System Identification Toolbox[20][21]協助,找出一個與腳踏車模型相似的轉移函數。
4.1
ARX 模型與轉移函數的實驗
將系統的輸入輸出用一個簡單的差分方程表式: y t a y t 1 a y t n b u t n b u t n n 1 e t (20) 其中e t 為白雜訊(white-noise),n 為極點數目,n 1 為零點數目,n 為輸入對 輸出的延遲,(20)式稱為 ARX 模型(Auto-Regressive eXogeneous model)。在此考慮兩個多項式 A z 1 a z a z B z b z b z 則(20)式可改寫成A z y t B z u t n e t 定義參數向量θ a a a b b T (21) 令系統轉移函數G z,θ BA (22) 雜訊轉移函數H z,θ (23)
則y t G z,θ u t n H z,θ e t (24) 定義輸入輸出資料向量 φ t y t 1 y t n u t n u t n n 1 T (25) 根據[22]中的定義,於時間(t-1)時,一步領先的輸出預測值y t|θ 為 y t|θ H z,θ G z,θ u t n 1 H z,θ y t (26) 其中,G z,θ 為系統轉移函數,H z,θ 為雜訊轉移函數,u t n 與 y t 為輸入和輸出狀態,θ 則是參數向量。 將(22)、(23)代入(26)中,得 y t|θ B z u t n 1 A z y t (27) 將(21)、(25)代入(27)中,得到 y t|θ θTφ t φT t θ (28) (28)式可知,系統一步領先預測值與參數向量的線性關係,故 ARX 模型又稱線性回歸 模型(linear regressive model)。
本研究利用ARX 模型求得實驗平台的轉移函數,並希望轉移函數的形式與腳踏車 模型相似,這與n 、n 、n 的設定有關,以下分為兩個部分討論。 考慮δ 對 r的轉移函數: 回顧(14)式,δ 對 r的轉移函數其分母為二階,分子是一階。 設n 2,n 1,n 1 r t δ t 1 δ t δ t 透過雙線性轉換z T /T / T 為取樣時間 ,將上式轉換為連續時間的轉移函數:
T / T / T / T / T / T / T / T / T / T / T / T / 發現分母為二階,但分子會出現s 項,與(14)式不符。 設n 2,n 2,n 0,令輸入 u t δ t δ t 1 r t u t δ t δ t 1 1 z δ t δ t δ t 則離散時間轉移函數出現z=-1 之零點,經雙線性轉換: T T T T T T T T T T / T / T / T / 上式分母仍為二階,分子的最高次則為s 項,符合(14)式,這是因為 z=-1 之零點經雙 線性轉換後應對應到s=∞,故連續時間轉移函數之分子將比分母少一階。 將δ 代換成δ ,推導方式不變,可得δ 對 r轉移函數的參數設定與δ 對 r的設定相同。 考慮δ 對a 的轉移函數: 回顧(14)式,δ 對a 的轉移函數其分母為二階,分子亦是二階。 設n 2,n 3,n 0 a t δ t δ t 透過雙線性轉換z T /T / ,將上式轉為連續時間的轉移函數: T / T / T / T / T / T / T / T / 上式中分母與分子皆為二階,符合(14)式。將δ 代換成δ 亦可得相同結果。
輸入輸出資料向量φ t 是由實驗得知,實驗時車速保持約 120cm/s,δ 由操控者透 過遙控器恣意給定角度,δ 由 DSP 晶片控制,其角度變化為耦和的弦波。考慮一般車 輛正常行駛時,其頻率響應約略低於1Hz,在此選擇取樣頻率約為車輛動態頻率的 100 倍,故令取樣間隔時間為0.0122 秒。利用 SD 卡儲存每取樣時間點 δ 、δ 、a 、r 與車速ν的資訊。 下圖為某次實驗的數據: 圖 19 車速 圖 20 前、後輪轉向角度
圖 21 旋轉速度與側向加速度 由圖19 可知,車輛定速行駛的時間約為 50 秒,52 秒左右的震盪現象應是車輛停止時, 實驗者觸碰到實驗平台使車輛有些許倒退,則直流馬達反轉會造成DSP 中的 QEP 電路 解碼錯誤。欲求得定速下的車輛轉移函數,擷取第500 筆至第 3500 筆(即 6.1 秒至 42.7 秒)δ 、δ 、r、a 資料為(28)式之y t|θ 、φ t ,令n 0, 則n+1 筆一步領先的輸出資料向量y t|θ y t y t 1 y t n φ t y t 1 y t n u t u t n 1 y t n 1 y t n n u t n u t n n 1 利用多輸入多輸出ARX 模型與最小平方法(LSE)[22]可得系統之參數向量θ,並透過雙 線性轉換,得到車輛連續時間的轉移函數。 a r T s T s T s T s δ δ T s . . . . . T s . . . . . T s . . . . T s . . ..
將量測到的δ 、δ 代入上式轉移函數中算得一組估測的r、a ,與實際量測值(圖 21)比 較可以驗證轉移函數的準確度。 圖 22 旋轉速度的量測值與估測值比較 圖 23 側向加速度的量測值與估測值比較 紅線是估測值,藍線是實際量測值,兩者差異越小表示求得的轉移函數描述車輛動態 越準確,上二圖中,紅、藍線大致重疊,算是估測較佳的代表類型。上述是利用ARX 模型針對單次實驗估測轉移函數,然而每次實驗估測的轉移函數皆不同,為了求得一 組具代表性的轉移函數,4.2 節將一次估測多筆實驗數據,並驗證所得轉移函數的精確 度。
4.2
整合多筆實驗結果與驗證
考慮一次估測多筆輸入輸出資料所得轉移函數應更具參考價值,重複4.1 節實驗方 式,令實驗的取樣時間間隔皆為0.0122 秒,於 40 次求得轉移函數的實驗當中,發現轉 移函數的階數皆與(14)式相同,但係數的正負號卻不一定與(14)式一致,故選擇 15 筆輸 入輸出資料其ARX 模型估測轉移函數效果較佳且係數的正負號與(14)式相同,附錄的 表8 為 15 筆資料個別估測的轉移函數。 整理表8 的 15 筆實驗輸入輸出資料: y t|θ y t y t y t 1 y t n 1 φ t y t 1 y t n u t u t n 1 y t 1 y t n u t u t n 1 y t 2 y t 1 n u t 1 u t n y t n y t n n u t n 1 u t n n 2 其中,n+1 為一步領先輸出資料的長度,底標 1~15 代表 15 次不同的實驗數據。 同樣利用多輸入多輸出ARX 模型與 LSE 求得參數向量θ,經雙線性轉換可以得連續時 間的轉移函數。 T s . . . . . (29) T s . . . . . (30)T s .. .. (32) 圖 24 T s 、T s 之波德圖 圖 25 T s 、T s 之波德圖 由於本實驗平台為實車1/10 比例縮小,故實驗平台的波德圖可以與圖 2、圖 3 中車速 為12m/s 之圖形相互參照,圖 25 中,T s 之頻寬約為 4.7Hz,T s 之頻寬約為 3.8Hz, 兩系統頻寬皆大於一般車輛。
上述的轉移函數是同時估測15 次實驗得到,應更能代表車輛的動態行為,以下分三個 部分驗證其精確度。 驗證一:選擇上述 15 次實驗中的一筆輸入輸出資料,比較用來估測出(29)~(32)式之實驗 數據與此數據代入(29)~(32)式得估測值之間的誤差。以下例子為附錄的表 8 中實驗 14 之數據: 圖 26 轉移函數驗證 1,實驗的車速 圖 27 轉移函數驗證 1,實驗的前、後輪轉向角度
圖 28 轉移函數驗證 1,實驗的旋轉速度,實際值與估測值比較圖
圖 29 轉移函數驗證 1,實驗的側向加速度,實際值與估 測值比較圖
圖 30 轉移函數驗證 1,旋轉速度與側向加速度之實驗值與估測值 誤差 由圖28、29 發現,相位的部分實際值與估測值大體一致,增益的落差多出現於峰值部 分,r 的估測值於某些峰值較實際值來的低,而a 的某些峰值其估測值高於實際值。圖 30 顯示整個實驗過程中,旋轉速度與側向加速度之誤差值,此誤差即實際值減去估測 值,於定速下,旋轉速度的平均誤差為10.69° s⁄ ,而側向加速度之平均誤差為 25.35cm s⁄ 。
驗證二:選擇一筆實驗資料估測出轉移函數之形式與腳踏車模型相似,但此轉移函數估 測效果較差故不被使用於表8 中,比較此實驗數據與透過(29)~(32)式求得的估測值之間 的誤差。以下為此實驗資料估測出的轉移函數: T s . . . . . T s . . . . . T s . . . . T s . . . . 此轉移函數之階數與正負號與(14)式相同。以下為實驗數據,並將實驗資料代入(29)~(32) 式,比較其實際值與估測值。 圖 31 轉移函數驗證 2,實驗的車速 圖 32 轉移函數驗證 2,實驗的前、後輪轉向角度
圖 33 轉移函數驗證 2,實驗的旋轉速度,實際值與估測值比較圖
圖 34 轉移函數驗證 2,實驗的側向加速度,實際值與估測值比較 圖
圖 35 轉移函數驗證 2,旋轉速度與側向加速度之實驗值與估測值 誤差 由圖33、34 可知,實際值與估測值之相位部分表現相當近似,對照圖 35 可以發現, 旋轉速度與側向加速度之誤差最大值多出現在實驗值峰值部分,於定速下,旋轉速度 的平均誤差為12.09° s⁄ ,而側向加速度之平均誤差為 33.11cm s⁄ 。
驗證三: 選擇某次實驗估測的轉移函數其正負號不符合(14)式,比較此實驗數據與透過 (29)~(32)式求得的估測值之間的誤差。以下為此實驗資料估測出的轉移函數: T s . . . . . T s . . . . . T s . . . . T s . . . . 於T s 的部分,分子的一階係數正負號與(14)式不同。將此實驗的輸入資料代入 (29)~(32)式,比較其估測值與實際量測值。 圖 36 轉移函數驗證 3,實驗的車速 圖 37 轉移函數驗證 3,實驗的前、後輪轉向角度
圖 38 轉移函數驗證 3,實驗的旋轉速度,實際值與估測值比較圖 圖 39 轉移函數驗證 3,實驗的側向加速度,實際值與估測值比較 圖
圖 40 轉移函數驗證 3,旋轉速度與側向加速度之實驗值與估測值 誤差 觀察圖38、39,估測值的相位大致上符合實際值,對照圖 40 可以發現,旋轉速度與側 向加速度之誤差最大值仍是出現在實驗值峰值部分。於定速下,旋轉速度的平均誤差 為11.85° s⁄ ,而側向加速度之平均誤差為 27.34cm s⁄ 。 經多次驗證可知,利用表8 的實驗資料估測效果大多較驗證二、三所選用的實驗 資料好,由於峰值的部分估測值會出現較大誤差,所以實驗值的峰值數量對估測效果 也有影響,若驗證一之實驗值峰值個數偏多,即車輛持續處於劇烈震盪的情況,則平 均誤差值也可能會大於驗證二、三所使用的實驗資料。觀察多次驗證的結果,發現估 測值的相位頗接近實際量測值,增益的部分,落差則時常發生於峰值,但平均誤差的 差距不大,因此選擇(29)~(32)式為代表車輛的數學模型。
第五章 控制器設計與實驗
本章將使用第四章求得代表車輛的數學模型來設計控制器,此控制器使實驗平台 於定速行駛時,其側向加速度與旋轉速度可以追隨一組給定的參考訊號。為了便於控 制器的設計,於5.1 節中,將原本為多輸入多輸出的車輛轉移函數解耦合為兩個單輸入 單輸出的模型。5.2 節是利用實驗的方式,了解更多關於感測器與車輛動態的資訊,實 驗所得的結論將一併考慮於5.3 節控制器設計流程中。經模擬驗證後的控制器將套入於 硬體中實驗,並從實驗結果再對控制器增益進行調整,使輸出的側向加速度與旋轉速 度更貼近給定的參考訊號。本章節中,各個實驗的取樣時間間隔皆為0.0976 秒,是第 四章系統判別實驗的8 倍,由於第四章的實驗是為了求得實驗平台連續時間的轉移函 數,故選用較高的取樣頻率,而此章節控制器驗證的相關實驗中,必須回授陀螺儀與 加速度計之取樣值,經控制器計算後將發送週期為0.019 秒的 PWM 訊號控制前、後輪 轉向伺服機,此控制訊號之週期為轉向伺服機的固有特性,相當接近第四章所使用的 取樣時間間隔,為了確保有效的控制轉向伺服機且避免控制流程中具上、下取樣(up sample、down sample)之情形使系統太過複雜,故本章實驗的取樣時間間隔提高為 0.0976 秒。由於代表實驗平台之數學模型為連續時間的轉移函數,故使用不同於第四章的取 樣頻率並不會影響控制流程。5.1
控制迴路的解耦合
回顧4.2 節,實驗平台的轉移函數: T s . . . . . (29) T s . . . . . (30)T s .. .. (31) T s .. .. (32) a T s δ T s δ (33) r T s δ T s δ (34) 前、後輪轉向角度對於側向加速度與旋轉速度皆為多輸入多輸出系統,為了便於控制 器設計,將(33)、(34)式解耦合為兩個單輸入單輸出系統。 令δ TT δ ∆ (35) 將(35)代入(33)式, a T s TT δ ∆ T s δ T s ∆ (36) 則新的輸入∆ 對側向加速度a 為單輸入單輸出系統。 將(35)代入(34)式, r T s TT δ ∆ T s δ T s ∆ T T T T T δ T s ∆ TR s δ 其中,TR s T T T T T 令δ TT R ∆ ∆ (37) r T s ∆ TR s TT R ∆ ∆
則新的輸入∆ 對旋轉速度 r 為單輸入單輸出系統。 考慮(37)式, TT R 並不是嚴格真分有理函式,這是因為TR s 為分母四階而分子為三階 的系統,為了避免∆ 之高頻雜訊影響旋轉速度迴路的控制效能,故於TR s 加入一個新 的極點,使 T TR 之高頻增益呈現斜率為 20 db dec⁄ 的下降趨勢。新加入的極點應比 主極點更遠離虛軸,使 TR s 加入極點並補償增益後其低頻特性不變。 TR′ s T R s 透過 TT R 與 T TR 之波德圖可以看出兩系統於低頻部分相當近似,在0.9Hz 兩系統 增益差值約為0.1db,相位差約 8 度,由於一般車輛動態屬於較低頻的響應,因而可以 改寫(37)式為: δ TT R ∆ ∆ r T s ∆ TR s TT R ′ ∆ ∆ TR s ∆ (38) 圖 41 TT R 之波德圖
圖 42 TT R ′ 之波德圖 由(36)、(38)式可知,系統解耦合為: a r T s 0 0 TR s ∆ ∆ ∆ δ TT δ ∆ δ TT R ∆ T TR′ δ 1 T T T TR′ δ 1 1 T 2 1 T ' R 1 T − R T Δ1 Δ2 y a r 1 1
T
RT
Δ
1 Δ2r
y a f δ rδ
1 2 1 1 T T 2 1 ' R T T 1 2 2 1 ' 1 1 R T T 1 T T + 圖 43 兩個等效的方塊圖。左圖為系統解耦合的流程圖,右圖為前、後輪轉向角度 與輸出之關係5.2
初步實驗
此節中設計了三個不同的實驗,希望透過實際的車輛響應了解更多關於感測器與 車輛動態的資訊,這將有助於後續的控制器設計,實驗的部分分為靜態實驗、初步控 制器實驗與動態實驗。5.2.1 靜態實驗
靜態實驗的方式為量測實驗平台靜止狀態下,即前、後輪轉向角度、車輛旋轉速 度與側向加速度理論值為零時,感測器的輸出數據,藉此了解陀螺儀、加速度計與兩 個角度電位檢測計的精確度,若感測器輸出值與理論值差距越大,則表示此感測器的 精確度較差。實驗的取樣時間間隔為0.0976 秒。 圖 44 前、後輪角度電位檢測計靜態下的輸出 於靜止狀態下,前輪的角度電位檢測計輸出範圍約正負0.5 度,後輪角度電位檢測計輸
出約在正負0.2 度之間。 圖 45 陀螺儀與加速度計於靜態下的輸出 圖 46 陀螺儀與加速度計於靜態下輸出的頻譜 陀螺儀於靜態下輸出範圍約正負2 度/秒,而加速度計量得的側向加速度輸出約在正負 15cm s⁄ 之間。由圖 46 可知陀螺儀靜態輸出之頻率較雜亂,而加速度計靜態輸出之頻 率較集中於低頻部分,這兩個感測器輸出值將回授至後續設計的控制器運算。
5.2.2 初步的控制器實驗與帶通濾波器設計
5.1 節中,代表實驗平台的轉移函數解耦合為兩個單輸入單輸出系統,於此小節分 別對這兩個系統設計簡單的控制器,使閉迴路系統穩定,將控制器套入實驗平台,並 且令輸入參考值為零,於實驗平台定速前進時分析感測器的數據,藉此了解感測器雜 訊對控制流程的影響。 1 1 T 2 1T
' R1
T
−
RT
Δ1 Δ2 ya
r
1 C ( s ) 2C ( s )
y a _ r e f r _ r e f − − 圖 47 初步控制系統的方塊圖 上圖為解耦合後系統與初步設計控制器的方塊圖,C 、C 分別為側向加速度迴路與旋 轉速度迴路之初步控制器,回授路徑上的低通濾波器則是為了過濾加速度計與陀螺儀 輸出的高頻雜訊。本實驗平台為十分之一比例縮小的車輛,故實驗平台120cm/s 的速 度模擬成一般車輛的車速約為12m/s,回顧 2.1 節一般車輛波德圖,車速為 12m/s 時, 輸入對旋轉速度轉移函數之頻寬約為2.4Hz,考慮 5.2.1 節中,感測器頻率大於 2Hz 仍 有相當程度的雜訊輸出,因此選擇低通濾波器之截止頻率為2Hz。C .
C 0.3 .
Low pass filter . . .
側向加速度迴路加入控制器後的增益邊限(gain margin)為 6.00db,相位邊限(phase margin)為 76.80 度,旋轉速度迴路加入控制器後的增益邊限為 3.78db,相位邊限為 81.23 度,兩迴路皆為穩定,下圖為加入控制器後兩迴路之閉迴路系統波德圖。
圖 48 加入初步控制器後,側向加速度迴路的波德圖
加入控制器後,側向加速度迴路之低頻增益約為0db,而旋轉速度迴路低頻增益較小, 可以預期輸出的旋轉速度追蹤低頻參考訊號之效果應較差,即命令致動器轉向角度應 較小。將控制器套入實驗平台,實驗時,車速保持120cm/s,令輸入的參考值a _ 與r_ 為零,取樣時間間隔為0.0976 秒,並透過感測器與 SD 記憶卡記錄車輛行進間的各個 狀態。為了避免控制器算得的前、後輪轉向角度大於硬體限制( 35度),故設定前後輪 轉向角度大於 30度時,轉角則維持在 30度,稱為轉向飽和角度。 圖 50 初步控制器實驗的車速 圖 51 初步控制器實驗的側向加速度與旋轉速度
圖 52 初步控制器實驗的前、後輪轉向角度 圖51 中,旋轉速度與側向加速度在約 4 秒出現的峰值應該是車輛啟動瞬間的動態造成, 控制器在7.3 秒時啟動,這時車速已保持約 120cm/s 速度前進。啟動控制器後,由圖 52 得知前、後輪持續轉向至飽和角度且維持不動,而分析多次實驗結果皆有這種情形 發生,回顧第三章(18)、(19)式,V 為車輛處於靜態下感測器輸出的平均值,若V 值 不夠精確,由(18)、(19)式算出的旋轉速度與側向加速度則帶有某偏差值,此偏差值在 整個控制流程中類似低頻雜訊,造成前、後輪轉向角度飽和。 為了避免V 計算的偏差造成致動器飽和,將側向加速度迴路與旋轉速度迴路中, 回授路徑上的低通濾波器改用帶通濾波器取代。BP1 為置於側向加速度迴路的帶通濾 波器,通過頻率0.25Hz~1.5Hz,增益為 0db,分別於 0.04Hz 與 3.5Hz 處增益降至-60db, BP2 則是置於旋轉速度迴路的帶通濾波器,通過頻率 0.25Hz~2Hz,增益亦是 0db,分 別於0.04Hz 與 5Hz 處增益降至-60db。BP1、BP2 之低頻的濾波特性相同,其截止頻率 是由多次實驗結果決定,而高頻部分的截止頻率考量類似5.2.2 之低通濾波器,但其過 濾高頻雜訊之效果更強,由於加速度計輸出的誤差較大,故令BP1 通過頻率之頻段較 短。
BP1 . . . . . . . . . . . . . . . . BP2 . . . . . . . . . . . . . . . 圖 53 BP1 的波德圖 圖 54 BP2 的波德圖
將帶通濾波器BP1、BP2 分別取代側向加速度與旋轉速度迴路的低通濾波器,則新的 控制系統方塊圖如下。 1 1 T 2 1
T
' R1
T
−
RT
Δ1 Δ2 ya
r
1 C ( s ) 2C ( s )
y a _ r e f r _ r e f − − 圖 55 新的控制系統方塊圖5.2.3 動態實驗與帶斥濾波器設計
本節將分析車輛直線前進時旋轉速度與側向加速度之響應,藉此了解車輛直行時 的動態。實驗時利用DSP 發送 PWM 訊號令前、後輪轉向角度固定為零度,使車輛直 線前進,並且保持車速為120cm/s,取樣時間間隔為 0.0976 秒。 圖 56 動態實驗的車速 圖 57 動態實驗的前、後輪轉向角度、旋轉速度與側向加速度
圖 58 動態實驗的旋轉速度與側向加速度頻譜 圖 59 動態實驗的側向加速度頻譜放大圖 前、後輪轉向角度、旋轉速度與側向加速度於兩秒左右的震盪應該是車輛啟動的動態 造成。觀察側向加速度的頻譜,峰值位在約0.4Hz、0.8Hz 等倍頻處,於其他實驗結果 亦有類似情形發生,此現象極有可能是車輛滾動(roll)或傾動(pitch)所造成,這些動態並 沒有考慮在本論文所使用的二維腳踏車模型中,而旋轉速度的頻譜並沒有發現特別的 規律。在此,針對側向加速度迴路設計一個帶斥濾波器,於0.4Hz 與 0.8Hz 增益降至-20db, 藉此過濾其他車輛動態造成的側向加速度響應。帶斥濾波器
圖 60 NH 的波德圖 將帶斥濾波器置入側向加速度迴路中,則圖55 可改為下圖表示。 1 1 T 2 1
T
' R 1 T − RT
Δ1 Δ2 ya
r
1 C ( s ) 2C ( s )
y a _ r e f r _ r e f − − 圖 61 具帶斥濾波器與帶通濾波器的控制系統方塊圖5.3 控制器設計與實驗
綜合5.1、5.2 節的結果,於解耦合後的控制流程中加入帶通濾波器與帶斥濾波器。 此節將針對這個新的流程設計控制器,使得輸出訊號可以追隨給定的參考值。控制器 經模擬驗證後,將控制程式燒錄於DSP 的快閃記憶體開始硬體實驗。分析實驗數據並 與模擬值比較,重新調整控制器增益,使車輛動態更能符合給定的參考值。
5.3.1 控制器設計
經 5.2 節的初步實驗,得到一個具有帶斥濾波器與帶通濾波器之控制流程(圖 61), 本小節將針對此流程中的側向加速度迴路與旋轉速度迴路設計控制器,使輸出的車輛 動態可以追隨一組給定的參考訊號,回顧圖61,初步控制器C s 、C s 皆分別由一個 前饋控制器與一個回授控制器取代,則圖61 可更改為下圖表示。 1 1 T 2 1 T ' R 1 T − R T Δ1 Δ2 y ar
1 1 C ( s ) y a _ r e f r _ r e f − − 1 2 C ( s ) 2 1 C ( s ) 2 2 C ( s ) 圖 62 具前饋控制器與回授控制器之系統方塊圖考慮圖62 的側向加速度迴路: 令回授控制器C 0.01 (39) 前饋控制器C (40) 則開迴路系統C T NH BP1之增益邊限為 500.13,相位邊限為無窮大。閉迴路系 統C C TC T NH BPNH 之波德圖如下。 圖 63 側向加速度迴路之閉路系統波德圖 觀察圖63,除了 0.4Hz、0.8Hz 處增益降至約-20db 外,頻率低於 1.6Hz 之波德圖增益 約為-1db,這是因為側向加速度迴路中具一帶斥濾波器 NH,而頻率 4.7Hz 處增益降至 約-10db。 考慮圖62 的旋轉速度迴路: 令回授控制器C 0.05 (41) 前饋控制器C . (42) 則開迴路系統C TR BP2之增益邊限為 1.25,相位邊限為 29.35 度。閉迴路系統
C C TR C TR BP 之波德圖如下。 圖 64 旋轉速度迴路之閉路系統波德圖 觀察圖64,頻率 0.4Hz 至 1.1Hz 之波德圖增益約為-3db,於 2.5Hz 處增益降至-10db。 以下將透過模擬的方式驗證控制器C s 、C s 、C s 與C s 之效能。為了解 決後續資料分析時因(18)、(19)式中V 計算誤差,造成輸出的側向加速度與旋轉速度具 偏差值,故使用弦波作為輸入的測試訊號,藉此避免系統具有低頻響應,使後續分析 時感測器輸出值可利用帶通濾波器過濾低頻雜訊。由於側向加速度迴路之閉路系統於 0.4Hz、0.8Hz 增益太低,輸入之測試訊號頻率應避開這兩個頻段。由 5.2.1 節静態實驗 中可知,本研究所使用的陀螺儀與加速度計具有一定的誤差值,故輸入測試訊號之振 幅應在不使前、後輪轉向飽和的條件下越大越好。
令輸入a _ 180 sin 2πft cm s⁄ r_ 50 sin 2πft °⁄ f=0.6Hz、0.7Hz、0.9Hz 模擬結果如下圖所示。 f=0.6Hz 圖 65 輸入參考訊號為 0.6Hz 之側向加速度與旋轉速度模擬圖 圖 66 輸入參考訊號為 0.6Hz 之前、後輪轉向角度模擬圖
f=0.7Hz
圖 67 輸入參考訊號為 0.7Hz 之側向加速度與旋轉速度模擬圖
f=0.9Hz 圖 69 輸入參考訊號為 0.9Hz 之側向加速度與旋轉速度模擬圖 圖 70 輸入參考訊號為 0.9Hz 之前、後輪轉向角度模擬圖 由上述模擬可知,側向加速度與旋轉速度於三個不同的頻率皆可追隨給定的參考值, 且前、後輪轉向角度都不會轉至飽和( 30 度),旋轉速度模擬值與參考值的差異較側向 加速度的大,這是因為旋轉速度迴路之閉路系統增益於這三個頻率皆小於側向加速度 的增益。考慮到實驗平台之轉移函數不甚精確,為了避免硬體實驗的致動器飽和問題, 兩個迴路加入控制器後的低頻增益皆略小於0db,故輸出的模擬值皆小於參考值,以下 兩個小節將利用實驗平台驗證控制器的效能。
5.3.2 實驗一
將控制器(39)~(42)燒錄於 DSP 快閃記憶體中,實驗時,車速保持 120cm/秒,取樣
時間間隔為0.0976 秒,並將各個感測器的取樣值將傳入 SD 卡。 令輸入參考訊號a _ 180 sin 2πft cm s , r⁄ _ 50 sin 2πft °⁄ 其中,f=0.6Hz、0.7Hz、0.9Hz
f=0.6Hz:
圖 71 輸入參考訊號頻率 0.6Hz,前、後輪轉向角度實驗值
圖 73 輸入參考訊號頻率 0.6Hz,側向加速度與旋轉速度之頻譜
f=0.7Hz:
圖 75 輸入參考訊號頻率 0.7Hz,前、後輪轉向角度之實驗值
圖 77 輸入參考訊號頻率 0.7Hz,側向加速度與旋轉速度之頻譜
f=0.9Hz:
圖 79 輸入參考訊號頻率 0.9Hz,前、後輪轉向角度之實驗值
圖 81 輸入參考訊號頻率 0.9Hz,側向加速度與旋轉速度之頻譜 圖 82 輸入參考訊號頻率 0.9Hz,實驗值與參考訊號誤差比較圖 由上述三種頻率的實驗結果發現,旋轉速度與側向加速度實驗值的增益皆大於參 考值,故在下節的實驗中,將調整控制器的增益,嘗試令實驗平台之旋轉速度與側向 加速度更符合參考訊號。
5.3.3 實驗二
調降前饋控制器C 、C 之增益為原來的 0.7 倍。 C 0.7 (43) C 0.7 . (44) 將控制器(39)、(41)、(43)、(44)燒錄於 DSP 快閃記憶體,實驗時車速保持 120cm/s,取樣時間間隔為 0.0976 秒。以下將輸入兩種不同振幅的測試訊號分別於三個 頻率驗證調整增益後之控制器效能。 參考訊號1: a _ 180 sin 2πft cm s⁄ r_ 50 sin 2πft °⁄ 此參考訊號同實驗一,以驗證降低前饋控制器增益後的實驗效果。 f=0.6Hz: 圖 83 調整控制器增益後,輸入頻率 0.6Hz 的參考訊號 1,其側向加速度與旋轉 速度之參考值與實驗值圖 84 調整控制器增益後,輸入頻率 0.6Hz 的參考訊號 1,其側向加速度與旋轉 速度之頻譜 圖 85 調整控制器增益後,輸入頻率 0.6Hz 的參考訊號 1,實驗值與參考訊號誤 差比較圖
f=0.7Hz: 圖 86 調整控制器增益後,輸入頻率 0.7Hz 的參考訊號 1,其側向加速度與旋轉 速度之參考值與實驗值 圖 87 調整控制器增益後,輸入頻率 0.7Hz 的參考訊號 1,其側向加速度與旋轉 速度之頻譜
圖 88 調整控制器增益後,輸入頻率 0.7Hz 的參考訊號 1,實驗值與參考訊號誤 差比較圖 f=0.9Hz: 圖 89 調整控制器增益後,輸入頻率 0.9Hz 的參考訊號 1,其側向加速度與旋轉 速度之參考值與實驗值

![表 3 陀螺儀 PR0021 的特性 3.3.2 加速度計 三軸加速度計 AGB3_V2[15],與陀螺儀相同皆為類比訊號方式輸出,靈敏度為 800mV/G, 操作電壓 3.3V,可量測車輛的側向加速度。 側向加速度a V](https://thumb-ap.123doks.com/thumbv2/9libinfo/8370593.177497/32.892.127.444.162.453/陀螺儀度計三軸加儀相同皆為類比訊號方式輸出靈操作電壓V可量.webp)