國 立 交 通 大 學
電機與控制工程學系
碩 士 論 文
音圈馬達防手震位置控制之 FPGA 晶片研製
Design and Implementation of a FPGA Anti-Handshaking
Position Control Chip for a Voice Coil Motor
研 究 生:呂宜釗
指導教授:林錫寬 博士
音圈馬達防手震位置控制之 FPGA 晶片研製
Design and Implementation of a FPGA Anti-Handshaking
Position Control Chip for a Voice Coil Motor
研 究 生:呂宜釗 Student:Yi-Chao Lu
指導教授:林錫寬 Advisor:Dr. Shir-Kuan Lin
國 立 交 通 大 學
電機與控制工程學系
碩 士 論 文
A Thesis
Submitted to Department of Electrical and Control Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master in
Electrical and Control Engineering June 2008
Hsinchu, Taiwan, Republic of China
誌
謝
感謝指導教授林錫寬博士,在研究所兩年的生活中,給予我很多意見與指導。您豐 富的學識以及堅持的研究精神,都是我效法的對象。 其次,非常感謝吳上立博士、方政加博士,在百忙之中幫我進行論文口試,也感謝 各位老師對本論文的建議與指正,以及對我個人的勉勵。感謝博士班王超民學長的指導 與鼓勵,在研究過程中給予我很多的啟發與協助。感謝方志行博士、李宗原、余興政、 林星宇、何品齊、蔡鎧鍾、林凱祥、魏愷、郭銘峰和吳柏泯幾位學長姐在我研究過程中 對我的指導與建議,並感謝我的同窗好友振國、昱錚,與學弟妹淑婷、以軒、建智,陪 伴我在實驗室做研究的日子中,給我的鼓勵和支持,使得我在研究所這兩年獲益良多。 最後,我更要感謝我的家人,爸、媽、宜樺、宜峰、佳玫,以及女友秀欣、好友鑫 堂,他們在這段時間內不曾間斷的鼓勵和關懷,讓我可以堅持下去。在此僅以本份論文 的成果獻給我的家人與其他關心、幫助過我的師長及朋友,非常的感謝你們。
音圈馬達防手震位置控制之 FPGA 晶片研製
研究生 : 呂宜釗 指導教授 : 林錫寬 博士
國立交通大學電機與控制工程學系
摘要
本論文使用反應快速的音圈馬達作為自動對焦系統的致動器,可應用於數位相機或 數位攝影機,但由於使用者手部操作上的晃動造成系統產生摩擦力及傾斜角發生變動, 常使得自動對焦系統無法達到理想的控制位置,因此在本研究裡,將導入干擾觀測器與 反積分終結器配合比例積分控制器,來克服摩擦力及傾斜角變動所造成的擾動以實現音 圈馬達防手震位置控制。 本論文以 Altera 公司所開發的場效型可規劃邏輯陣列(FPGA)晶片為基礎,整合數位 邏輯晶片於單一顆 FPGA 晶片上,以實現音圈馬達防手震位置控制。在數位邏輯晶片 中,以硬體描述語言(VHDL)實現數位轉類比控制程式、類比轉數位控制程式、數位濾 波器、音圈馬達之速度 PI 控制器、位置 P 控制器、干擾觀測器、反積分終結器以及位 置估測演算法等功能模組;在數值系統設計上使用 24 位元 Q17 格式的數值處理方式實 現正規化,以解決數位邏輯晶片上浮點數運算的問題,且能夠提高音圈馬達控制精確度 與晶片資料數值運算的解析度。此外,為了能有效降低自動對焦系統在數位相機裡的成 本及體積,本研究採用磁性尺、小型的磁阻式感測器再配合軟體演算法取代使用昂貴的 細分割晶片來獲取目前控制系統的位移跟速度資訊。在實驗系統的建構方面,採用 Altera 公司 Cyclone II 系列的 FPGA Development Board 為音圈馬達的控制核心,並配合一套自行設計的外部電路,包含類比數位轉換、訊號驅 動、訊號調整、訊號取樣的功能,來完成音圈馬達防手震位置控制系統的架構,並經由 實驗數據的量測分析與控制參數的調整,來獲取系統較佳的控制效能表現。
Design and Implementation of a FPGA Anti-Handshaking
Position Control Chip for a Voice Coil Motor
Student : Yi-Chao Lu Advisor : Dr. Shir-Kuan Lin
Department of Electrical and Control Engeering
Nationl Chiao Tung University
ABSTRACT
In this thesis, the voice coil motor (VCM) with fast response time is used to be the actuator of the auto-focusing (AF) system applying to the digital camera or digital video camera. Because of the user’s handshaking, the AF apparatus induce the friction and inclination problem would cause incorrect position control. In order to overcome the effect of the friction and inclination, the disturbance observer and anti-windup with PI controller feedback system is applied to implement this anti-handshaking position control.
The anti-handshaking position control of the VCM is realized on a chip based on FPGA (Field-Effective Programmable Gate Array) developed by Altera, and logic chips are integrated on a single FPGA chip. In digital logic chips, HDL (Hardware Description Language) is used to realize the function modules. For example, digital/analog conversion control, analog/digital conversion control, digital filter, proportional-integral (PI) controller for velocity loop, proportional (P) controller for position loop, disturbance observer, anti-windup controller, and position estimation algorithm. To realize normalization, 24 bits Q17 numerical format is used on numerical system design, and the problem of floating point number calculation on chip can be solved. Moreover, the precision of motor control and the resolution of chip data process can both be improved. Besides, the mini magnetic scale, mini magneto-resistive (MR) sensor and position estimation algorithm instead of using expensive interpolation chip are used for cost-down and mini-size.
In the experiment system, Cyclone II FPGA Development Board is used to be the VCM control core, accompanying with a self-designed VCM Circuit Board consist of signal conversion, signal driving, and signal processing. The better system control performance can be achieved by measuring experiment data and modulating the control parameters.
目錄
摘要 ...i ABSTRACT ... ii 目錄 ... iii 圖例目錄 ...vi 表格目錄 ...xi 第一章 緒論...1 1.1 研究動機與目的 ...1 1.2 研究背景與方法 ...2 1.3 FPGA、DSP 與 PC-Based 設計介紹...3 1.4 本文架構 ...5 第二章 文獻回顧...6 2.1 摩擦力對精密控制造成的影響 ...6 2.2 摩擦力的補償方式 ...10 2.3 系統的傾斜角度對對焦定位控制的影響 ...112.4 音圈馬達介紹及高效益音圈馬達設計方式 ...12 第三章 音圈馬達系統控制原理介紹...19 3.1 音圈馬達波形參數鑑別 ...19 3.2 音圈馬達位置計算 ...23 3.3 音圈馬達定位控制架構 ...26 3.3.1 反積分終結器(Anti-windup) ...26 3.3.2 干擾觀測器(Disturbance Observer) ...28 第四章 系統硬體架構規劃與設計...32 4.1 系統介紹 ...32
4.2 FPGA 發展板介紹(Altera FPGA Development Board) ...33
4.3 音圈馬達系統 ...35
4.3.1 磁阻感測器...36
4.3.2 光遮斷器(SG-290)與比較器(LM339)...38
4.4 音圈馬達外部電路(VCM_Board)...41
4.4.1 數位轉類比電路(D/A Converter AD5445)與放大器 TL084...41
4.4.2 音圈馬達驅動電路-放大器(OPA177)與緩衝器(BUF634)...44
4.4.3 類比轉數位電路(A/D Converter AD7896) ...45
4.5 磁阻感測訊號處理電路(MR_Signal_Processing Circuit)...49
第五章 系統模擬與實驗結果之分析比較...54 5.1 系統模擬架構 ...54 5.2 干擾源的設計 ...56 5.3 系統模擬結果比較 ...58 5.4 實驗結果 ...61 第六章 結論與未來發展...69 6.1 結論 ...69 6.2 未來發展 ...70 參考文獻 ...71
圖例目錄
圖 1.1:系統架構示意圖 ...3 圖 2.1:靜態摩擦力模型示意圖 ...7 圖 2.2:摩擦力區間與速度關係圖[1] ...8 圖 2.3:摩擦力與位移遲滯關係[7] ...8 圖 2.4:model-based 摩擦力補償...10 圖 2.5:non-model-based 摩擦力補償 ...10 圖 2.6:系統傾斜角θ 所造成的重力下滑分力示意圖...11 圖 2.7:佛來明左手定則 ...13 圖 2.8:音圈馬達結構圖 ...13 圖 2.9:音圈馬達機構 ...14 圖 2.10: γ 、φ與t 關係圖 ...16 r 圖 2.11: γ 、φ與E 關係圖...17 o 圖 2.12: γ 、φ與η關係圖 ...17圖 3.1:系統參數鑑別示意圖 ...20 圖 3.2:系統參數鑑別流程圖 ...21 圖 3.3:區塊分割圖 ...22 圖 3.4:線性近似關係圖 ...23 圖 3.5:位置計算流程圖 ...26 圖 3.6:反積分終結系統(Anti-windup) ...27 圖 3.7:程式實現上所採用的反積分終結系統架構 ...27 圖 3.8:系統控制方塊圖 ...28 圖 3.9:干擾觀測器架構方塊圖[3] ...29 圖 3.10:干擾觀測器等效方塊圖[3] ...31 圖 4.1:系統架構連接示意圖 ...32 圖 4.2:FPGA 發展板...34 圖 4.3:FPGA 發展板電路架構圖...34 圖 4.4:音圈馬達結構示意圖 ...35 圖 4.5:音圈馬達實際結構 ...35 圖 4.6:磁阻感測器示意圖 ...36 圖 4.7:磁阻感測器輸出大小關係 ...37 圖 4.8:橋型磁阻感測器 ...37 圖 4.9:磁阻感測器架構 ...37
圖 4.10:橋型磁組感測器輸出波形 ...38 圖 4.11:光遮斷器 SG-290...38 圖 4.12:光遮斷器 SG-290 與比較器 LM339 電路接線圖...39 圖 4.13: (a)滑動元件位於光遮斷器起點與終點之間的波形...40 (b)滑動元件位於光遮斷器起點的波形 ...40 圖 4.14: (a)滑動元件位於光遮斷器終點的波形...40 (b)滑動元件位於中間→起點→終點→中間的波形 ...40 圖 4.15:AD5445 電路連接示意圖 ...41 圖 4.16:AD5445 與 TL084 電路接線圖 ...41 圖 4.17:AD5445 腳位與功能方塊圖 ...42 圖 4.18:AD5445 控制時序圖 ...43 圖 4.19:輸出至 AD5445 的數位訊號 ...44 圖 4.20: (a)將輸出至 AD5445 的數值作圖...44 (b)示波器量測 AD5445 轉換後的類比訊號...44 圖 4.21:音圈馬達驅動電路示意圖 ...44 圖 4.22:音圈馬達驅動電路接線圖 ...45 圖 4.23:AD7896 腳位與功能方塊圖 ...45 圖 4.24:AD7896 電路接線圖 ...46
圖 4.26:Data Read Operation ...48 圖 4.27: (a)CONVST 與 BUSY 腳位的電壓波形 ...48 (b)訊號產生器輸入至 AD7896 的弦波波形...48 圖 4.28:AD7896 轉換完成的數位訊號數值 ...49 圖 4.29:將 AD7896 轉換完成後的數值做圖 ...49 圖 4.30:感測訊號處理電路 ...50 圖 4.31:經過感測訊號處理電路後的波形 ...50 圖 4.32:音圈馬達外部電路設計圖 ...51 圖 4.33:音圈馬達外部電路佈線圖(PCB Layout) ...52 圖 4.34:音圈馬達外部電路板(VCM_BOARD) ...52 圖 4.35:系統硬體架構 ...53 圖 5.1:音圈馬達系統方塊圖 ...54 圖 5.2:PI 控制模擬架構 ...55 圖 5.3:PI 附加反積分終結器與干擾觀測器控制模擬架構 ...55 圖 5.4:Simulink 下模擬系統角度連續變動及摩擦力干擾 ...57 圖 5.5:干擾源電壓波形 ...57 圖 5.6:位置命令為 5mm 的 PI 控制系統響應 ...58 圖 5.7:位置命令為 5mm 的 PI 控制系統響應局部放大圖 ...58 圖 5.8:位置命令為 5mm 的 PI 反積分終結器附加干擾觀測器系統響應 ...59
圖 5.9:位置命令為 5mm 的 PI 反積分終結器附加干擾觀測器局部放大圖 ...59 圖 5.10:兩種控制架構的系統響應 ...60 圖 5.11:兩種控制架構的系統響應局部放大圖 ...60 圖 5.12:Quartus II 軟體操作介面...62 圖 5.13:SignalTap II 使用環境圖 ...62 圖 5.14: FPGA 晶片中 VHDL 程式規劃...63 圖 5.15:Quartus II 設計軟體中 FPGA 晶片內部架構圖 ...64 圖 5.16:PI 控制系統對 3mm 位置控制響應圖 ...65 圖 5.17:PI 附加反積分終結器與干擾觀測器對 3mm 位置控制響應圖 ...65 圖 5.18: (A) PI 系統傾斜角改變位置響應 ...66 (B) 音圈馬達控制電壓...66 圖 5.19: (A) PI 附加反積分終結器與干擾觀測器系統傾斜角改變位置響應 ...66 (B) 音圈馬達控制電壓...66 圖 5.20: (A) PI 系統傾斜角持續變動位置響應 ...67 (B) 音圈馬達控制電壓...67 圖 5.21: (A) PI 附加反積分終結器與干擾觀測器系統傾斜角持續變動位置響應 ....68 (B) 音圈馬達控制電壓...68
表格目錄
表 1.1: FPGA、DSP 與 PC-Based 之特性、優點、缺點比較 ...4 表 2.1:音圈馬達系統參數表 ...18 表 3.1:區間判定及近似距離關係表 ...24 表 4.1:Cyclone II 晶片規格 ...33 表 4.2:AD5445 各腳位功能表 ...42 表 4.3:AD5445 數位類比轉換表 ...43 表 4.4:AD7896 各腳位功能表 ...46 表 4.5:AD7896 類比數位轉換表 ...47第一章 緒論
1.1 研究動機與目的
一般數位相機的成像品質,除了受影像感測元件的品質好壞影響外,鏡片對焦驅動 馬達的定位精度也是影響成像品質的重要因素。一般的步進對焦馬達其響應速度慢,且 對焦的過程中所產生的運轉雜音大,故無法有效的應用於高品質的行動攝影裝置中。而 超音波對焦馬達雖然改善了步進對焦馬達響應速度慢及運轉雜音大的問題,但其驅動方 式為摩擦驅動,故容易因磨損而減低其使用壽命,且其元件成本較為昂貴,故無法普遍 的使用於大眾化的自動對焦鏡頭中。而音圈馬達其元件成本低,且仍擁有良好的響應速 度及定位精度,因此,本論文採用音圈馬達作為系統的致動器來實現自動對焦系統。 在馬達需要高精確度的應用場合下,快速的控制響應以及進階的控制理論佔有重要 的因素,這時選用高時脈及高頻寬的微處理器,可以輕易的實現高等控制理論,但其序 列式的程式執行方式會有最小取樣時間的限制,進而影響頻率響應的速度;而特殊應用 積體電路(Application Specific Integrated Circuit, ASIC)雖然不容易實現複雜的控制理 論,但晶片內部邏輯閘各自獨立、平行運算,具有處理速度快的優點,為了達到精準的 馬達控制,工程師大多是利用一顆 DSP 處理器再加上一顆特殊應用積體電路來互相搭 配,藉以截長補短,雖然達到了響應快又精準的控制結果,但研發成本卻因此提高,也 會花費許多時間來作兩者介面間的整合,尤以馬達驅動晶片這種開發成熟的產業來說, 如何有效的做系統整合及快速的產品開發以降低成本,是非常重要的一件事。在強調系統整合晶片(System on chip, SOC)的馬達控制領域中,Altera 公司的 FPGA Development Board 是達成此一目標的一種有效方法,該發展板可以內建具有快速運算 能力的特殊應用積體電路整合型晶片,而本論文的主要目的則是如何利用此一特點達到 精準的馬達定位控制。
1.2 研究背景與方法
隨著目前半導體技術的不斷成長,馬達的控制不得不朝向系統整合晶片邁進,以特 殊應用積體電路作為現今馬達控制晶片的發展重點,其晶片內部邏輯閘平行運算的方式 能有效提升處理速度,而可規劃成專為馬達架構所設計的控制晶片更能完全符合各種馬 達控制的需求,且在量產下的成本計算價格會比使用微處理器或 DSP 處理器更加便宜, 故 ASIC 晶片具有很大的發展優勢。 由於完整的 ASIC 晶片從研發到製造完成需要費時很長的時間,並且若最後驗證錯 誤,整個繁瑣的研製過程就必須重新開始,為了避免時間與金錢的浪費,本論文使用可 重複規劃且驗證快速的 Altera FPGA Development Kits(以下簡稱 FPGA 發展套件),其中 包含了一顆 Altera Cyclone II EP2C35 的場效型可規劃邏輯陣列(Field Programmable Gate Array, FPGA)晶片,利用發展套件中可規劃的 FPGA 晶片、輸入輸出腳位、周邊輸入輸 出設備,例如 LED、按鈕、七段顯示器等,作為驅動電路及控制法則實現的程式研發環 境,在硬體上採用音圈馬達作為受控廠,並設計驅動電路板、回授訊號處理電路板來完 成整個音圈馬達防手震位置控制系統。實驗主要是利用磁阻感測器(Magneto-resistive Sensor, MR Sensor)抓取音圈馬達滑 動元件移動所產生的訊號,再利用位置計算演算法(Position Estimating Algorithm)來計算 音圈馬達滑動元件目前所在的正確位置,再經由建立反積分終結器(Anti-windup)與干擾 觀測器(Disturbance Observer)結合比例積分控制器(Proportional-Integral Controller, PI Controller)對音圈馬達進行控制,其方式為利用速度及位置回授訊號對滑動元件進行控 制,系統中加入反積分終結器與干擾觀測器可針對馬達控制時因摩擦力及傾斜角變動所 造成的低頻物理雜訊及高頻電氣雜訊予以抑制,進而提升音圈馬達定位的精確度,以降 低雜訊對系統所產生的位置擾動,達到精確定位控制目標。 在程式的研發軟體上,本文使用 Altera 公司的 Quartus II 發展軟體來撰寫及編譯硬 體描述語言(VHDL),燒錄於 FPGA 晶片,再配合外部的驅動電路及訊號處理電路,做 程式功能的驗證,以單一晶片實現出具有位置控制與防手震功能的音圈馬達控制晶片。
圖 1.1:系統架構示意圖
1.3 FPGA、DSP 與 PC-Based 設計介紹
早期數位電路的設計方法是以數位訊號處理晶片(DSP Chip)來實現其複雜的運算 式,但運算式愈複雜連帶的也影響到系統的取樣時間(Sampling Time)使得輸出波形容易 嚴重失真,為了將系統的研發、驗證與具有快速計算能力的硬體結構整合於一體,因此 本論文利用場效應可程式規劃邏輯陣列FPGA晶片來實現控制架構。FPGA晶片具有可線 上規畫的特色,以及提供近似閘級(gate-level)的硬體運作速度,並與DSP一樣具有相同 的可程式化特性與高效能,然而FPGA卻不具有DSP組合語言指令的序列處理方式以及 軟體處理程序中分支指令造成的耗時與不確定性等缺點。另一方面,DSP指令集提供的 定型指令,在系統並行處理中難以達成時序同步的安排,致使處理速度的瓶頸會落在 DSP處理器上。 而FPGA可讓我們自由規劃,同時將所有功能集中於一個晶片中,較不受外在條件 變化而影響參數值,可達到高速運算進而提高取樣頻率減低微處理器計算負擔,同時降 低高次諧波失真的問題。且由於集中數位元件於同一晶片之中,零件老化問題較不嚴重 且對溫度變化也不敏感,有利系統長期運轉下維持精密伺服運轉的功能。 FPGA晶片控制器之所以取代PC-Based控制器,是希望將控制器的設計、驗證、除 錯、實作、與執行監控等系統發展整合於同一環境,以提供硬體運作速度的可平行化, 可減低處理時間來有效提昇數位控制器的實用性。當採用FPGA時,在設計之初不必為 每個模組做出用硬體還是軟體的選擇,如果在設計中間階段需要一些額外的性能,則可 以利用FPGA中現有的硬體資源來加速軟體程式碼中的瓶頸部份。由於FPGA中的邏輯單 元是可程式化的,可針對特定的應用而訂製硬體,設計者不必轉換到另一個新的處理器 或者編寫程式碼,就可做到這一點。表1.1: FPGA、DSP與PC-Based之特性、優點、缺點比較 特性 可程式化的 IC,把所需之演算法整合在一顆 IC 上,主要是 去設計電路,然後讓 FPGA 有特定的功能,可以用邏輯閘或 Verilog、VHDL 等硬體描述語言,以寫程式的方式去設計想 實現的電路,再利用 FPGA 的工具軟體轉成實際的電路。 優點 速度快、密度高、設計彈性高、價格性能比優,配合發展套 件,可以重複且快速的規劃晶片組態,以進行模擬驗證,設 計完成後可以更快速地進入除錯階段,縮短晶片研發的時程 與節省產品上市的時間。 FPGA 缺點 難以撰寫太過複雜的流程控制及演算法。 特性 DSP 本身就像是 CPU 一般,週圍有 ROM/RAM 等其它的搭 配元件,甚至有 I/O 介面,可以在上面寫程式。指令集以及 電路以數學運算為主,使其在數學運算上比一般 CPU 有更高 的效能,演算法皆在 DSP 內完成。 優點 可用來做複雜的流程控制,可以較容易的實現出繁複的演算 法,甚至可以載入一個即時性的作業系統,增加較大型應用 上的可能性。 DSP 缺點 因為程式的執行屬於循序指令執行,所以速度比FPGA來的 慢,也不適合作平行處理。 特性 一種基於 PC 技術的控制系統,以 PC 的 CPU 為運算核心, 訊號則從 PC 插槽(slot)上的擷取卡輸入,此類用途一般都 著 眼 於 PC 上 之 人 機 介 面 與 資 料 儲 存 於 檔 案 。 PC-based 借助於 IT 技術的發展,在運算、存儲、網路和軟 體開放性方面具有優勢。 優點 PC-based 具有強大運算能力,具有開放標準的系統平臺和 PCI 介面,精美且低成本的顯示技術,豐富的網路能力,可 以與使用者互動的人機介面與資料以檔案的方式儲存。 PC Based 缺點 系統的可靠性略差,雖然具有很強的 CPU,但其多工作業系 統是非即時的,所以程式的迴圈週期反而影響整體效能。
1.4 本文架構
本文架構共分為六章。 第一章:緒論,說明了本文研究動機與目的、研究背景與方法,以及各種不同設計方法 的整理比較,最後略述了本論文的架構。 第二章:文獻回顧,探討摩擦力對精密控制造成的影響及摩擦力的補償方式,系統傾斜 角對定位控制上的影響及音圈馬達介紹與音圈馬達設計方式。 第三章:音圈馬達系統控制原理介紹,介紹系統控制的流程及原理,位置計算演算法推 導,定位控制架構以及反積分終結器與干擾觀測器的原理介紹。 第四章:系統硬體架構規劃與設計,針對本研究的系統硬體架構與其它週邊電路功能作 詳細的介紹,包含設計原理、方法及電路設計。 第五章:系統模擬與實驗結果之分析比較,利用 FPGA 晶片實現防手震位置控制,由模 擬和實驗結果可驗證加入反積分終結器與干擾觀測器確實可以抑制系統外在 干擾及摩擦力和傾斜角變動所造成的擾動達到精確定位控制的目標。 第六章:結論與未來發展,針對現有的研究成果進行討論及未來展望。第二章 文獻回顧
自動對焦系統在進行對焦定位的過程中,最主要的兩種外在干擾影響因素,分別為 因滑動元件與軸承接觸而產生的摩擦力及因系統傾斜角度改變所導致的重力分力變 化,這些外在干擾因素將會對系統的定位精度造成影響,以下將對摩擦力及系統傾斜角 改變,對系統定位控制所造成的影響進行討論。2.1 摩擦力對精密控制造成的影響
在機械系統中不可避免的會因接觸而產生非線性的摩擦現象,這種非線性的外部影 響力會造成系統控制上的困難。而在一般的傳統控制方式上,是將摩擦力視為系統所存 在的外在干擾,而利用線性的控制器配合閉路結構做補償,由於無法直接對摩擦力建立 相對應的轉移函數進行補償,因此摩擦力對於系統控制的精確度有著一定程度的影響。 以下將對摩擦力做大略的介紹,再經由現實摩擦力現象和靜態摩擦力模型進行比 較,可發現有些摩擦力特性是靜態摩擦力模型所無法掌握,因此將介紹動態摩擦力模型 (LuGre model),藉由動態摩擦力模型來分析這些無法由靜態模型所描述的現象。 根據牛頓第二運動定律可知 ( ) f( ) dv M F t T t dt = − (2.1) 其中 M 為滑動元件質量;v
為速度; ( ) F t 為滑動元件所受之作用力; ( ) f T t 為所受之摩擦力。因此要對元件的運動行為進行分析,勢必要對摩擦力的數學模型先進行了解。圖 2.1 為古典靜態摩擦力示意圖,由圖中可知靜態摩擦力模型為靜摩擦及庫倫摩擦加上黏滯摩 擦所組合而成,其對應的摩擦力方程式為(2.2)式。 圖 2.1:靜態摩擦力模型示意圖 ( ) if ( ) 0 ( ) ( ) ( ) if ( ) 0 f fc F t v t T t T sgn v Bv t v t = ⎧ = ⎨ ⋅ + ≠ ⎩ (2.2) 其中T 為庫倫摩擦力fc ; B 為黏滯摩擦係數。 根據靜態摩擦力模型已大致上可以表現出系統受摩擦力作用所產生的影響,但隨著 量測技術的提昇我們發現單純的靠靜態摩擦力模型並無法完全有效的掌握系統所受到 的摩擦力影響,圖 2.2 為物體處於低速移動的狀態下所受到的摩擦力和物體穩態速度之 間的相對關係圖,當物體剛脫離靜摩擦力階段,此時物體所受到的摩擦力會因為 Stribeck effect 的影響而隨著速度的增加而逐漸減小,當脫離 Stribeck effect 作用範圍後則會隨著 速度增加而持續增加,也就是之前靜態摩擦力模型中所敘述的黏滯摩擦。因此我們可以 根據圖 2.2 將物體所受到的摩擦力分為四種作用階段:靜摩擦區、邊界潤滑區、部分流 體潤滑區以及完全流體潤滑區[1]。
圖 2.2:摩擦力區間與速度關係圖[1] 在實際的物體運動過程中所受到的摩擦力現象,遠比古典靜態摩擦力模型單純的由 黏滯摩擦以及動靜摩擦力組合的行為還來的複雜許多,因此許多的學者透過觀察及記錄 摩擦現象的變化提出能夠描述這些現象的數學模型[2][7][8],(2.3)式是摩擦力與位移之 間的遲滯關係,如圖 2.3 所描述的現象與物體處於靜摩擦力區間時所產生的 pre-sliding displacement 現象近似[7]。 [1 sgn( )] f f fc dT T v dx T α σ = − (2.3) 其中 x為兩接面之間的相對位移; v為兩接面之間的相對速度; σ 為摩擦力為零情況下的初始斜率; α 為設計遲滯關係的參數。 圖 2.3:摩擦力與位移遲滯關係[7]
將(2.3)式改寫成為(2.4)式 [1 sgn( )] f f f f fc dT dT dx dT T v v v dt dx dt dx T α σ = = = − ⋅ (2.4) 當α 為 1 時,可將(2.4)式以(2.5)式表示,也就是 Dahl's model 的數學式架構 [ ] f f fc dT v v T dt =σ −T (2.5) 當物體以定速移動的情況下,由(2.5)式可知,物體所受的摩擦力大小為庫倫摩擦 力,因此利用 Dahl's model 可以對摩擦現象中的 pre-sliding displacement 現象及庫倫摩擦 力加以描述,但沒有包含對於 Stribeck effect 現象的描述,Canudas de Wit[2]等人經由結 合 Dahl's model 與 Stribeck effect 現象,並藉由假想一個狀態變數 z 建構出一個動態摩擦 力模型(LuGre model),利用這個模型可以對摩擦力的行為作完整的描述。其數學方程式 為 0 0 1 2 ( ) f v dz v z dt g v dz T z v dt σ σ σ σ ⎧ = − ⎪⎪ ⎨ ⎪ = + + ⎪⎩ (2.6) 2 ( / ) ( ) ( ) v vs fc fs fc g v =T + T −T e− (2.7) 其中 T 為最大靜摩擦力; fs v 為 Stribeck velocity。 s (2.7)式中的 ( )g v 型式主要是對於 Stribeck effect 現象進行修正,而(2.6)式中的 1dz dt σ 其功能為加強靜摩擦區的阻尼現象描述,而σ2v則是用來表現靜態摩擦力模型中的黏滯 摩擦,其中σ2為黏滯摩擦係數。
2.2 摩擦力的補償方式
摩擦力對系統所產生的影響,通常採用下列兩種方法進行補償,分別為 model-based 補償設計方式,以及 non-model-based 補償設計方式。所謂的 model-based 補償設計方式, 就是採用建立摩擦力對應模型對摩擦力進行計算加以補償,如利用古典靜態摩擦力模型 配合回授控制對系統所受的摩擦力進行補償,或是直接對系統提出動態摩擦力模型,並 以此模型來建立估測器進行對系統摩擦力的補償,此外還有如用模糊控制理論或是適應 性控制理論架構,對系統建立摩擦力對應模型來進行補償,如圖 2.4 所示, F 是系統所 遭遇的真實摩擦力,而Fˆ是由摩擦力模型所估測出的摩擦力,將Fˆ加進去系統的控制訊 號即可對摩擦力進行補償。 圖 2.4:model-based 摩擦力補償 對摩擦力進行補償的另外一種方式為 non-model-based 補償設計方式,其方式為不 對系統所受的摩擦力建立相對應的摩擦力模型,而單純的將系統所受的摩擦力視為一個 外在的干擾源進行補償,如一般最常見的 PID 回授控制補償方式,或是利用建立干擾觀 測器將系統所受到的摩擦力、負載擾動及系統中的各種不確定因素視為外在的干擾,再 經由干擾觀測器迴路進行補償[3][12],如圖 2.5 所示, ( )d k 為系統所受的外在干擾, ( )n k 為系統的量測雜訊。 圖 2.5:non-model-based 摩擦力補償2.3 系統的傾斜角度對對焦定位控制的影響
當滑動元件處於非水平狀態之下,滑動元件將會因為傾斜角度所產生的重力分力, 而產生向下滑動的現象,如圖 2.6 所示,因此在音圈馬達滑動元件呈非水平的狀態下進 行定位控制,就需要產生一控制力抵消重力分力對系統所造成的影響,當系統傾斜角度 在對焦的過程中發生持續性的改變,則抵消其影響的控制力也必須隨著重力分力的變化 進行調整。對於相機系統而言,由於拍攝時系統傾斜角度會隨著使用者的姿勢而有所改 變,故如何對重力分力的改變進行有效的補償,對於對焦定位的精準度有著很大的影響。 圖 2.6:系統傾斜角θ 所造成的重力下滑分力示意圖 在本研究中由於系統硬體存在加工上的不精確性,以及考慮系統在運作期間,系統 的摩擦力鑑別參數會受到系統傾斜角度的影響而發生改變,假如採用 model-based 的設 計對系統單獨建立摩擦力模型加以補償,在某些情況下反而容易造成系統控制上的不穩 定。故在本次研究中對系統摩擦力的補償採用 non-model-based 補償設計方式,其方式 為建立干擾觀測器將摩擦力視為系統所受的外在干擾因素進行補償;此外對於因傾斜角 度所導致的重力下滑分力變化,造成系統定位上的偏移,同樣可以利用干擾觀測器加以 抑制。2.4 音圈馬達介紹及高效益音圈馬達設計方式
本次研究中所採用的音圈馬達未來將應用於攜帶式相機系統中,因此本節中將對於 如何設計出一個高效率且省電的音圈馬達作介紹。音圈馬達為一種線性直流馬達(Linear Direct Current Motor,LDM),為利用通電線圈及永久磁鐵交互作用產生推力進行驅動的 固定行程致動器,早期音圈馬達的架構被應用於收音機的喇叭結構上,由於音圈馬達所 產生的推力大小與流經磁場的線圈電流成正比,故能達到良好的線性控制效果,此外音 圈馬達具有零磁滯、低電氣時間常數、低機械時間常數和具有高度的位置敏感度等特 性,由於上述的這些良好特性,使音圈馬達在許多精密伺服定位的地方獲得廣泛的應用。 音圈馬達的作用原理是根據勞倫斯定律(Lorentz Law)中所描述的力產生方式,當位 於磁場中的線圈,經由施加電壓而產生相對應的電流時,根據磁場與電流交互作用而產 生推力,其推力大小如式(2.8)所示: F =rILB (2.8) 其中 F 為作用於線圈上的推力; r 為線圈實際位於磁場作用的有效長度與導線總長度的比值; I 為線圈因端電壓所產生的電流大小; L 為導線的總長度;
B 為磁場的磁通密度(Magnetic Flux Density)。
當線圈的電流與磁場方向垂直,則根據佛來明左手定則(Fleming's Left Hand Rule) 可決定作用力的方向,即左手的食指方向代表磁通密度( B )的方向,而中指方向與線圈 電流( I )方向平行,則導線會因為電磁交互作用而產生平行於拇指的作用力( F )如圖 2.7 所示,由於一個音圈馬達系統的設計初期, L 與 B 的值已固定,在音圈馬達正常作用範 圍內 r 的比例關係亦保持不變,故唯一的可變量為電流( I ),由此可知推力( F )與線圈所 流經的電流成正比,故只要改變其電流的大小就可以對音圈馬達的作用力進行調整。
圖 2.7:佛來明左手定則 音圈馬達可分為旋轉型音圈馬達與線性式音圈馬達二種,本次研究中所採用的音圈 馬達為使用於自動對焦系統之定位馬達,故將其設計為線性式音圈馬達,其設計架構簡 單而且馬達特性線性度佳,在不需搭配額外的齒輪或是螺旋傳動軸情況下,響應速度較 快、噪音小且摩擦力小,由於將使用於手持系統中,故其設計除了響應速度外,還需要 對如何降低耗能加以設計,其設計結構圖如圖 2.8 所示,音圈馬達機構如圖 2.9 所示。 圖 2.8:音圈馬達結構圖
圖 2.9:音圈馬達機構 將線圈的直徑定義成φ,則音圈馬達的有效繞線匝數為: (lw) (lp) N round round φ φ ≈ ⋅ (2.9) 其中 l 為線圈厚度; w p l 為線圈有效長度。 自動對焦音圈馬達的設計主要取決於下列三項參數的表現 1.上升時間(t );2.電能消r 耗(E );3.效能轉換率(o η)。其中上升時間的長短影響對焦動作的執行效率,而電力消耗 率及系統效能轉換比關係著系統有效作用時間的長短,其數學關係方程式如下列所示 max 0 ( ) r t d =
∫
v t dt (2.10) 0 ( , ) tr ( ) ( ) o E γ φ =∫
i t V t dt (2.11) 2 0 ( , ) ( ) ( , ) ( , ) ( , ) r t o o E i t R dt E γ φ γ φ η γ φ γ φ − =∫
(2.12)其中 γ =lm/lw為磁鐵與線圈的寬度比例; v為音圈馬達滑動元件的速度; i 為線圈上的電流; V 為線圈的端電壓; R 為線圈的電阻值。 音圈馬達的動態方程式可以表示為下列方程式[5]: ( ) ( ) ( ) ( , ) ( , )di t v( , ) ( ) V t i t R L K v t dt γ φ γ φ γ φ = + + (2.13) ( ) ( , ) ( , ) ( ) m e L f L dv m B v t F F K i t F dt + = γ φ − = γ φ − (2.14) 其中 L 為線圈的電感值; v K 為電壓轉換參數; m為滑動元件的質量; m B 為阻尼參數; e F 為電磁力; L F 為系統負載; f K 為力轉換參數。
音圈馬達系統的電磁力(F )可利用馬克斯威爾應力法(Maxwell stress method)計算求e
得[4],由式(2.14)可知系統的力轉換參數(K )可表示為: f e f F K i = (2.15) 在 MKS 制的情況下K 與v K 相等。 f 線圈的電感值( L )[11]與電阻值( R )大小分別為:
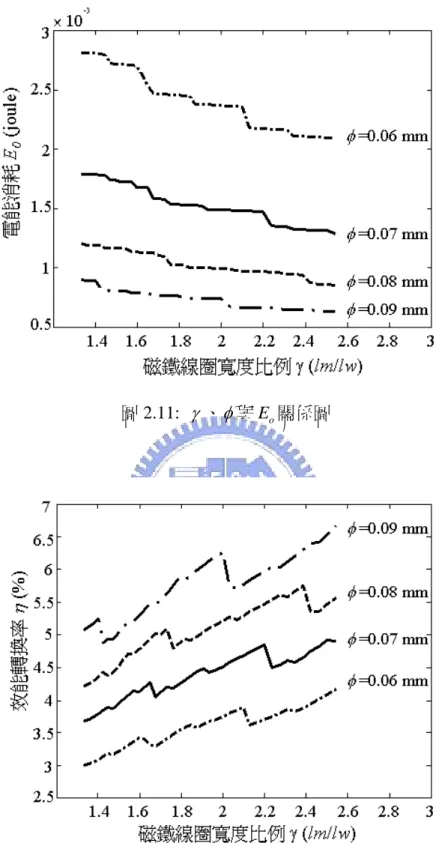
2 ( ) 2 ( ) ( ) W i i W i W i i L i − Δ − + + Δ = Δ (2.16) 2 ( ) 4 t Nl R ρ γ πφ = (2.17) 其中 W為磁功率; i Δ 為線圈電流變動。 根據上述方程式中可以發現系統參數的設計都與γ 與φ的變化有關,故要建立γ 及 φ與音圈馬達三項重要參數t 、r E 、o η的關係圖來選擇出適當的γ 與φ進行設計。在系 統質量(m)為 1.8g、最大電壓與電流限定值分別為 2.97V 與 30mA、B 為 0.005Nt/(m/s)、m 最大行程(dmax)設計為 5.21mm 及系統負載為 0.05gw 的情況下,可獲得γ 與φ變化與系 統的t 、r E 及o η關係圖如下列所示: 圖 2.10: γ 、φ與t 關係圖 r
圖 2.11: γ 、φ與E 關係圖 o
圖 2.12: γ 、φ與η關係圖
在考慮t 、r E 及o η相互匹配性後,選擇γ 為 2.5、φ為 0.07mm 來進行系統設計,系
表2.1:音圈馬達系統參數表 項目 模擬系統參數值 實測系統參數值 線圈電阻( R ) 34.8Ω 32.8Ω 線圈電感( L ) 1.3mH 1.2mH 力轉換參數( Kf ) 42.9gw A 42.3/ gw A / 線圈匝數(N) 288匝 288匝 滑動元件質量(m) 1.8g 1.8g 上升時間(t ) r 44.0ms 44.5ms 電力消秏(E ) o 3 1.3 10∗ − j 1.9 10∗ −3 j 效能轉換比(η) 4.9% 3.9%
第三章 音圈馬達系統控制原理介紹
本章將介紹音圈馬達系統的定位控制理論。音圈馬達的定位控制流程分為三個步驟: (1)初始化波形參數鑑別: 在對焦系統啟動時,需執行的步驟,透過此步驟,讓系統獲取當時狀態下磁性尺的 特性參數。提供位置計算演算法所需的波形參數進行位置計算。 (2)音圈馬達位置計算流程: 本研究採用磁性尺配合小型磁阻感測器當作音圈馬達的位置感測器,利用建立一套 位置計算演算法對獲得的感測訊號進行分析判斷,來獲得目前滑動元件所在的位置資 訊,利用此方式可以取代過去以昂貴的細分割晶片來進行位置計算。 (3)音圈馬達定位控制架構: 利用計算得到的位置資訊對滑動元件速度進行估算,透過位置及速度回授對音圈馬 達進行定位控制演算,由於對焦定位系統容易受外在的干擾因素造成位置的擾動,故本 研究利用建立干擾觀測器加上反積分終結器結合比例積分控制器來對系統進行控制,使 系統能有效的抑制外在擾動所造成的影響。3.1 音圈馬達波形參數鑑別
在確立音圈馬達結構及其系統參數後,則要對其滑動元件進行定位控制,首先要利 用軟體式位置計算方式計算出滑動元件所在的位置資訊,再經由定位演算法則達成滑動 元件之定位。其中軟體式位置計算法則包含感測波形參數鑑別及音圈馬達位置計算流 程,圖 3.1 為系統進行感測波形參數鑑別流程示意圖,當啟動馬達定位流程後,首先產 生一個負向的推力使馬達移動到起始點,在偵測到起始點的光遮斷器遭觸發後,程式改 變驅動電壓使馬達產生正向的持續移動到聚焦行程的終止端點,並在移動的過程中對磁 阻感測器所回傳的訊號進行紀錄分析,藉由所獲得的訊號判別出系統的波形參數b 、A A X 、b 、B X ,再將馬達歸回到起始點,結束初始化波形參數鑑別流程。 B由於配置於滑動元件上的交互充磁磁條與固定住的磁阻感測器產生相對的移動,造 成磁阻感測元件所受的磁場強度產生變化,因此磁阻感測器的兩組輸出訊號,會產生週 期性訊號分別為正弦波訊號與餘弦波訊號,所產生的正弦波訊號與餘弦波訊號經過低通 濾波電路及主動式儀表放大器,將其高頻雜訊加以濾除並適當的將電壓準位調整至類比 數位轉換器(A/D Converter)輸入端可接受的電壓範圍,將類比訊號轉換成數位訊號, FPGA 晶片便可以獲得磁阻感測器所產生的訊號。在波形參數鑑別來回的移動過程中, FPGA 晶片對於抓取到的訊號振幅進行最大最小值判斷,再利用獲得的最大最小值關係 推算出正弦波與餘弦波的偏壓及振幅。 sin cos A A A B B B x b X x b X θ θ = + ⋅ = + ⋅ (3.1)
max( ) min( ) max( ) min( )
2 2
max( ) min( ) max( ) min( )
2 2 A A A A A A B B B B B B x x x x X b x x x x X b − + = = − + = = (3.2) 其中 x 為擷取的正弦訊號;A b 為正弦訊號偏壓;A X 為正弦訊號振幅; A B x 為擷取的餘弦訊號;b 為餘弦訊號偏壓;B X 為餘弦訊號振幅。 B 圖 3.1:系統參數鑑別示意圖
圖 3.2:系統參數鑑別流程圖 由於每一次重新進行馬達定位控制流程前便再次進行整個波形參數鑑別流程,因此 可以使b 、A X 、A b 、B X 這四個用來進行位置計算的波形參數值不會受到環境溫度變B 異而產生過大的改變。若b 、A X 、A b 、B X 這四個參數值是固定,而非採用在每次啟B 動定位控制流程前加以偵測,則容易因為環境溫度的變化使這四個參數值與原先設定的 值產生差異,對於系統造成更大位置估算上的誤差。 在建立系統的波形參數b 、A X 、A b 、B X 後,在進行定位控制的過程中 FPGA 晶B 片不斷擷取目前磁阻感測器的正弦波與餘弦波訊號經由式(3.3)和式(3.4)將其進行標準 化,使所擷取到的正弦波及餘弦波其範圍落在-1 及+1 之間。 ( ) ( ) A A NA A x n b x n X − = (3.3) ( ) ( ) B B NB B x n b x n X − = (3.4)
利用正弦波與餘弦波間波形相位相差 90 度的特性,我們可以將標準化磁阻感測訊 號分割為四個區間,如圖 3.3 所示,以正弦波與餘弦波發生交越情況的訊號大小值,作 為決定區塊分割的判別標準。 圖 3.3:區塊分割圖
( )
1/ 2
REGION 1
( )
1/ 2
REGION 2
( )
-1/ 2
REGION 3
( )
-1/ 2
REGION 4
NB NA NB NAx
n
x
n
x
n
x
n
≥
⇒
≥
⇒
≤
⇒
≤
⇒
3.2 音圈馬達位置計算
利用弦波訊號間的相對關係,可對滑動元件的位置進行估算,假設交互極性磁條的 充磁寬度(pole_pitch )為 0.88 mm,則自動對焦的可移動部份每移動一個區塊則代表實 際走了 0.22 mm,而在目前區塊中的移動量則採對弦波進行線性近似方式來計算,其線 性近似方式如下圖 3.4 所示。 圖 3.4:線性近似關係圖 (3.5)式為x 的1 sin波線性近似值 x1∈ −[ π/ 4,π/ 4] 1 sin( / 4) / 4 y π x π = (3.5) (3.6)式為x 的1 sin波區間的近似移動距離 x1∈ −[ π/ 4,π/ 4] 1 1 _ _ _ 8 _ 8 8 sin( / 4) 8 / 4pole pitch pole pitch pole pitch pole pitch
y y x
π π
= + = + (3.6)
1 1 1 sin( / 4) 2 [sin( ) ] _ [ / 4, / 4] / 4 8 error D x π x pole pitch x π π π = − ⋅ ∈ − (3.7) 當磁條充磁間距越密集,則經由線性近似方式所計算出的實際位置將會更加準確。 當滑動元件位於起始點時,磁阻感測器所產生的兩個波型訊號的相對關係,並不會 恰好是位於所定義區間的起始點,因此在計算馬達實際位置的時候,會使計算出的位置 資訊產生偏移量,我們將此偏移量設定為P ,針對起始點位於不同的 REGION 狀態,OS 其滑動元件的P 可經由下列方程式求得 OS 1: _ 2 _ (0) 8 8 2 : _ 2 _ (0) 8 8 3 : _ 2 _ (0) 8 8 4 : _ 2 _ (0) 8 8 OS NA OS NB OS NA OS NB REGION pole pitch P pole pitch x REGION pole pitch P pole pitch x REGION pole pitch P pole pitch x REGION pole pitch P pole pitch x = + ⋅ ⋅ = − ⋅ ⋅ = − ⋅ ⋅ = + ⋅ ⋅ (3.8) 表3.1:區間判定及近似距離關係表 項目 判別方式 區間中近似距離 1 REGION ( ) 1/ 2 NB x n ≥ _ 2 _ ( ) 8 8 NA pole pitch pole pitch x n + ⋅ ⋅ 2 REGION ( ) 1/ 2 NA x n ≥ _ 2 _ ( ) 8 8 NB pole pitch pole pitch x n − ⋅ ⋅ 3 REGION ( ) -1/ 2 NB x n ≤ _ 2 _ ( ) 8 8 NA pole pitch pole pitch x n − ⋅ ⋅ 4 REGION ( ) -1/ 2 NA x n ≤ _ 2 _ ( ) 8 8 NB pole pitch pole pitch x n + ⋅ ⋅
在計算出起始位置的偏移量後,就可以經由計算已經過的區塊(pass_region)及目前 所在區塊中的近似位移,再與起始位置作比較,便可計算出目前滑動元件所在的位置 1 _ 2 ( ) _ ( ) 8 8 2 _ 2 ( ) _ ( ) 8 8 3 _ 2 ( ) _ ( ) 8 8 4 _ 2 ( ) _ 8 8 R NA OS R NB OS R NA OS R REGION pole pitch D n P pole pitch x n P REGION pole pitch D n P pole pitch x n P REGION pole pitch D n P pole pitch x n P REGION pole pitch D n P pole = + + ⋅ ⋅ − = + − ⋅ ⋅ − = + − ⋅ ⋅ − = + + ⋅ : : : : ( ) NB OS pitch x⋅ n −P (3.9) 其中 _ _ 4 R pole pitch P = ⋅pass region (3.10) 透過上述步驟即可計算出滑動元件的目前位置 ( )D n 。由於在每一次進行定位流程 前,便會重新計算並更新b 、A X 、A b 、B X 這四個參數值,因此環境溫度變化對於位B 置計算造成的誤差可以減至最小。而使用近似的線性方程式來計算移動位置,若磁條交 互充磁寬度為0.88mm,其線性近似方式計算位置所造成最大計算誤差約為 4.6 mμ ,而 累積誤差可以透過影像處理計算再回饋修正位移量,因此可以在適當的精度及軟硬體成 本之下達成良好的自動對焦目的。
圖 3.5:位置計算流程圖
3.3 音圈馬達定位控制架構
3.3.1 反積分終結器(Anti-windup)
致動器本身通常會有飽和(saturation)的非線性現象,例如馬達的輸出力矩有上限, 不論控制命令如何要求,其輸出力矩頂多只能維持在上限值,此時若使用積分控制器做 串聯控制,則可能產生積分終結的現象。當致動器的飽和現象產生時,使得真正進入系 統的控制力量小於控制器要求的力量,因此誤差修正的效果無法達到積分控制器預期完 成的目標,所以誤差的修正通常需要更長的時間,而在響應圖形上產生較大的過超量 (overshoot)或低超量(undershoot)。 改善積分終結現象的方法,通常是設計反積分終結器(Anti-windup)[13]。如圖 3.6 所示,當u 小於c umax時,控制器回授路徑不產生作用,當u 大於c umax時,控制器回授路 徑產生作用,降低積分器的輸入e,進而降低積分器的輸出u ,以抑制非線性飽和的產c生。積分器下端的迴路稱為 dead-zone nonlinearity,其斜率K 值通常必須夠大,使得反a 積分終結迴路能隨時有足夠的回授值來降低e,這樣的改善能有效地壓制上述因積分終 結所產生的過超量或低超量。 圖 3.6:反積分終結系統(Anti-windup) 為了程式實現上的便利性,圖 3.6 的反積分終結系統可以等效轉換成圖 3.7,其功能完全 一樣,但可以更容易實現, 圖 3.7:程式實現上所採用的反積分終結系統架構
3.3.2 干擾觀測器(Disturbance Observer)
音圈馬達定位控制架構採用速度及位置回授控制為主體架構,在內迴圈中對速度進 行比例積分控制並加上反積分終結器使系統不發生飽和現象,並在外迴圈利用比例控制 器對馬達位置的響應效果進行調整,由於系統在行進的過程中會受到摩擦力及因傾斜角 度所產生的重力分力等外在干擾因素,造成系統定位產生較大的擾動現象,對於自動對 焦系統而言,過大的擾動將會造成成像品質的下降,故必須對系統所受到的外在擾動加 以抑制,因此在速度 PI 控制迴圈中加入干擾觀測器[3][12]對系統所受的外在干擾進行抑 制,將系統速度及位置控制迴圈中外在因素所造成的擾動近似消除,以減低外在干擾對 系統定位控制所產生的影響。其系統控制架構方塊圖如圖 3.8 所示。 圖 3.8:系統控制方塊圖 位置誤差 (rd −p)經過 P 控制器乘以一個K 的增益,再進入 PI 控制器附加反積分dp 終結器後經過飽和限制條件輸出控制力u,而真正進入音圈馬達的控制力ε則是控制器 輸出u、外在干擾d與干擾觀測器的估測ζ 的總和。而干擾觀測器主要的目的即是希望 透過控制器的輸出力量u及量測出來馬達的速度v可以估測出外在干擾的估測值ζ ,使 ζ 趨近於真正的外在干擾d,而將系統所受到的摩擦力及傾斜角變化的擾動加以消除, 使真正進入音圈馬達的控制力趨近於控制器的輸出。其中干擾觀測器架構方塊圖如圖 3.9 所示。 圖 3.9:干擾觀測器架構方塊圖[3] 其中 P 為標準平台; n d為系統干擾; δ 為系統量測雜訊; o d 為估測干擾 假設 ( )Q s 為 1 的情況下,圖 3.9 經由梅森增益公式可得系統的估測干擾為 ( ) 1 [1 ] ( ) ( ) n o P s d u d P s P s ζ = = − + δ+ (3.11) 而系統的轉移函數為 ( )(v=P s u−do+d)=P s un( ) − (3.12) δ 在P sn( )≈P s( )的情況下,由(3.11)式中可以發現干擾觀測器所估測的干擾(d )約略等於o 實際的系統干擾(d)加上系統量測雜訊(δ )所造成的影響,當P s 與n( ) P s 有差距的情況( ) 下,則干擾觀測器所估測的d 除了外在的干擾及雜訊外,還包括了因系統參數變異而產o 生的干擾。
在 ( )Q s 設計為 1 的情況下,干擾觀測器雖然對於系統干擾能加以抑制,但系統的高 頻量測雜訊,則會因為1/P 不為真分有理函數,而產生放大的現象,因此必須對n Q s 的( ) 型式進行設計。根據梅森增益公式可將系統的輸出v以(3.13)式的方式表示 ( )v=Guv s u⋅ +Gdv( )s d⋅ +Gδv( )s ⋅ (3.13) δ 其中 ( )Guv s 為系統輸入(u)至系統輸出(v)的轉移函數 ( ) ( ) ( ) ( ) ( ) ( ) ( ( ) ( )) ( ) n uv n n P s P s v s G s u s P s P s P s Q s ≡ = + − (3.14) ( ) dv G s 為系統干擾(d)至系統輸出(v)的轉移函數 ( ) ( )(1 ( )) ( ) ( ) ( ) ( ) ( ( ) ( )) ( ) n dv n n P s P s Q s v s G s d s P s P s P s Q s − ≡ = + − (3.15) ( ) v Gδ s 為系統量測雜訊(δ )至系統輸出(v)的轉移函數 ( ) ( ) ( ) ( ) ( ) ( ) ( ( ) ( )) ( ) v n n v s P s Q s G s s P s P s P s Q s δ δ − ≡ = + − (3.16) 在P sn( )≈P s( )的情況下由(3.14)式(3.15)式(3.16)式中可發現,在 ( )Q s 增益約為 1 的情況 下,Guv ≈P sn( )、Gdv ≈ 、0 Gδv ≈ − ,而在 ( )1 Q s 增益約為 0 的情況下,我們可以發現 ( ) uv G ≈P s 、Gdv ≈P s( )、Gδv ≈ ;因此可利用分析干擾雜訊的特性來對 ( )0 Q s 進行設計, 系統的干擾如摩擦力或是因傾斜角所產生的下滑力變化多為低頻干擾,因此在低頻的情 況下G 必須近似於 0,故dv Q s 增益大小需近似於 1,而系統的量測雜訊多為高頻的電氣( ) 雜訊,因此 ( )Q s 在高頻的增益需近似於 0,此外由於1/P s 不為真分有理函式,故n( ) Q s( ) 的相對階數必須高於或等於P s 的相對階數,避免造成高頻訊號的過度放大,由以上n( ) 敘 述 可 知 , ( )Q s 的 設 計 方 式 為 相 對 階 數 高 於 或 等 於 P s 相 對 階 數 的 低 通 濾 波 器n( ) (Low-pass filter)。
在本次研究中採用二階巴特渥茲濾波器(Butterworth filter)來對系統進行模擬及實 驗,其數學式為 2 1 ( ) ( ) 2 ( ) 1 Q s s s τ ξ τ = + + (3.17) 其中ξ為低通濾波器 ( )Q s 的阻尼比(damping ratio); 1/τ為低通濾波器 ( )Q s 的截止頻率(cut-off frequency)。 選擇ξ =0.707,則τ 即為(3.17)轉移函數的頻寬(bandwidth)。 而干擾觀測系統等效方塊圖如下圖 3.10 所示 圖 3.10:干擾觀測器等效方塊圖[3]
第四章 系統硬體架構規劃與設計
4.1 系統介紹
系統架構如圖 4.1 所示,由 FPGA 發展板、音圈馬達系統(VCM_SYSTEM)、外部電 路板(VCM_BOARD)所構成,其中音圈馬達系統包含音圈馬達線圈、滑動元件、交互充 磁磁條、磁阻感測器及光遮斷器,外部電路板包含數位轉類比電路(D/A Converter)、音 圈馬達驅動電路、磁阻感測訊號處理電路、光遮斷器訊號處理電路及類比轉數位電路 (A/D Converter)。 圖 4.1:系統架構連接示意圖4.2 FPGA 發展板介紹(Altera FPGA Development Board)
本實驗採用的 FPGA 發展板為 Altera 公司所推出的 FPGA Development Board,而此 發展板所使用的 FPGA 晶片型號為 Cyclone II EP2C35F672C6,這顆 FPGA 晶片是由 672 根腳位的 FineLine BGA 封裝而成,其詳細規格表如表 4.1 所示。
表4.1:Cyclone II晶片規格
規格 Feature Cyclone II EP2C35F672C6
邏輯單元 Logic elements(Les) 33,216
M4K RAM blocks 105
總記憶體位元數 Total RAM bits 483,840
嵌入式乘法器 Embedded multipliers 35
鎖相迴路 PLLs 4
最大使用輸入/輸出接腳 Maximum user I/O pins 475
內部電壓 Internal supply voltage 1.5V
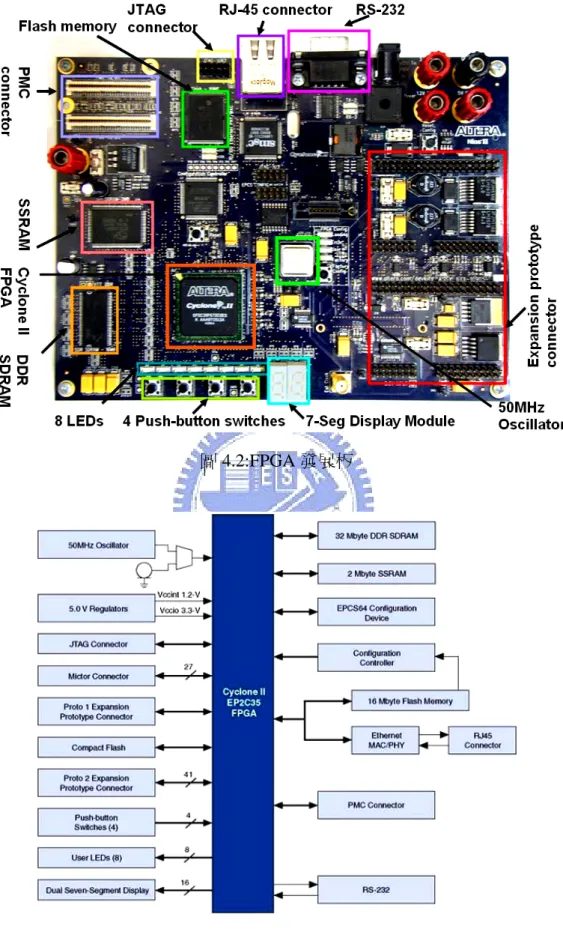
整塊 FPGA 發展板如圖 4.2 所示。除了 FPGA 核心晶片外,此發展板上還有其他的 周邊元件,包括了 16MBytes 的 Flash、2MBytes 的 synchronous SRAM、32MBytes 的 DDR SDRAM、一組 Compact Flash(CF)接頭及一塊 16MB 的 CF Card、一組 Mictor 接頭以搭 配選購的除錯模組、一組 Ethernet MAC/PHY 裝置用以透過網路做資料傳輸、一組 RS232 接頭可以連接序列埠、一組 JTAG 接頭載入埠、兩組共 82 根可規劃的 I/O 腳位、四顆按 鈕、八顆 LED、兩顆七段顯示器以及一個 50MHz 的石英震盪器,這些周邊元件對設計 者在驗證晶片功能及除錯上,提供了多種介面及解決方案,以利於減少晶片研發的時 間。其發展板上的電路架構圖如圖 4.3 所示。
圖 4.2:FPGA 發展板
4.3 音圈馬達系統
音圈馬達系統包含音圈馬達線圈及其滑動元件、交互充磁磁條、磁阻感測器及光遮 斷器,其示意圖如圖 4.4 所示。驅動音圈馬達線圈使滑動元件產生移動,藉由充磁磁條 移動所產生的磁場變化使磁阻感測器會產生一組正弦波與餘弦波的訊號,再將感測訊號 經由處理電路進行處理,而光遮斷器則是在波形參數鑑別過程中,用來判斷滑動元件是 否到達行進區間的端點,音圈馬達系統實際架構如圖 4.5 所示。 圖 4.4:音圈馬達結構示意圖 圖 4.5:音圈馬達實際結構4.3.1 磁阻感測器
目前常見的自動對焦系統對於對焦鏡片位置偵測方式大多採用下列所敘述的兩種 方式進行偵測:1.計數馬達轉動所產生的方波數;2.經由位置感測元件回傳訊號進行判斷。 傳統對焦系統所採用的對焦馬達多為步進馬達,對於步進馬達的位置偵測方式,可 以利用馬達的編碼器在運轉時所產生的方波訊號進行計數,利用計數所得到的值對應馬 達方波的週期,即可以獲得目前對焦元件所在的位置。而一些非步進式的對焦馬達系 統,如本次研究中所採用的音圈馬達系統,由於無法像步進馬達一樣在移動時產生方波 訊號來進行計數,故其位置計算方式要採用分析由位置感測元件所回傳的訊號,由於光 學尺的體積較大,無法有效的使用於手持相機系統中,故在本次研究中採用磁性尺配合 小型磁阻式感測器來作為位置感測元件,以下將對磁阻感測元件原理進行介紹。 磁阻感測器為使用磁阻效應元素來進行偵測磁力變化,主結構為兩個串聯的磁阻效 應元件,配合周邊電路進行感測電壓輸出,利用元素電阻值會隨著外在磁場強度變化而 產生改變,但與磁場的方向無關的物理特性來進行感測,如此便可以根據兩元件的電阻 值差異產生輸出電壓上的改變,來檢測出外在磁場強度的變化如圖 4.6。 圖 4.6:磁阻感測器示意圖 如果使兩個磁阻元件通過不同強度的磁場時,則兩個元件的電阻值將會產生差異, 而輸出電壓值也會隨著產生變化,當磁阻元件 1(MR1)通過的磁場大於磁阻元件 2(MR2) 則 MR1 電阻值大於 MR2,因此輸出電壓值下降,若 MR2 通過的磁場大於 MR1 則 MR2 的電阻值將會大於 MR1 使輸出電壓值上升如圖 4.7 所示。圖 4.7:磁阻感測器輸出大小關係 利用將四個磁阻元件間隔放置形成橋型電路,如圖 4.8 所示,藉由四個元件對於感 測目標的磁場強度變化,使感測器的兩個輸出電壓(V 及oA V )產生一組相位差為 90 度的oB 交錯弦波訊號如圖 4.10,利用這個方式可以將磁阻感測器用在計算感測目標的位置上。 圖 4.8:橋型磁阻感測器 圖 4.9:磁阻感測器架構
圖 4.10:橋型磁組感測器輸出波形
4.3.2 光遮斷器(SG-290)與比較器(LM339)
光遮斷器其主要功能為在波形參數鑑別過程中,判斷音圈馬達之滑動元件是否到達 行進區間之起點或終點,其型號為 SG-290,如圖 4.11。光遮斷器必須與比較器 LM339 搭配,產生數位的訊號以送回 FPGA 晶片進行判斷,當光遮斷器沒有物體遮住時,經過 比較器後的訊號為高準位 3.3V(High),當光遮斷器有物體遮住時,經過比較器後的訊號 為低準位 0V(Low),其電路接線如圖 4.12 所示。 圖 4.11:光遮斷器 SG-290圖 4.12:光遮斷器 SG-290 與比較器 LM339 電路接線圖
當滑動元件在光遮斷器起點和光遮斷器終點之間,則經比較器處理後的 SG_START 和 SG_END 訊號皆為高準位 3.3V(High),如圖 4.13(a)。當滑動元件在光遮斷器起點, 則經比較器處理後的 SG_START 訊號為低準位 0V (Low),SG_END 訊號保持在高準位 3.3V(High),如圖 4.13(b)。當滑動元件在光遮斷器終點,則經比較器處理後的 SG_END 訊號為低準位 0V (Low),SG_START 訊號保持在高準位 3.3V(High),如圖 4.14(a)。當滑 動元件從中間移動到光遮斷器起點,接著再移動到光遮斷器終點,最後再移回中間的波 形如圖 4.14(b)。
圖 4.13: (a)滑動元件位於光遮斷器起點與終點之間的波形 (b)滑動元件位於光遮斷器起點的波形
圖 4.14: (a)滑動元件位於光遮斷器終點的波形
4.4 音圈馬達外部電路(VCM_Board)
4.4.1 數位轉類比電路(D/A Converter AD5445)與放大器 TL084
數位轉類比電路(D/A Converter)的主要功能是接收來自於 FPGA 晶片運算過後的數 位控制訊號,並轉換為類比控制訊號輸出至音圈馬達驅動電路,其 IC 型號為 AD5445, 是一顆具有高頻寬且精度為 12 位元的並列式數位類比轉換 IC,其電源供應範圍為 2.5V 至 5.5V,參考電壓範圍可達-10V 至+10V,資料的讀取與傳輸為並列形式,是一顆易於 使用的並列介面(Parallel interface)數位類比轉換 IC,其與外部電路連接示意圖如圖 4.15 所示,AD5445 搭配 TL084 的電路接線圖如圖 4.16 所示。
圖 4.15:AD5445 電路連接示意圖
AD5445 共有 20 個 Pin 腳,圖 4.17 為 AD5445 腳位與功能方塊圖,各腳位的說明如 表 4.2 所示。
圖 4.17:AD5445 腳位與功能方塊圖
表4.2:AD5445各腳位功能表
Pin No. Mnemonic Description
1 IOUT1 DAC current output.
2 IOUT2 DAC analog ground.
3 GND Ground pin.
4-15 DB11-DB0 Parallel data bits 11 to 0.
16 CS Chip select input. Active low.
17 R/W Read/Write.
18 VDD Positive power supply input.
19 VREF DAC reference voltage input terminal.
20 RFB DAC feedback resistor pin.
AD5445 是 12 位元的數位類比轉換 IC,其輸出電壓及參考電壓與輸入數值資料的 關係式為: 1 1 1 ( / 2 ) 2 ( ) 2 n
OUT REF REF
n REF n V V D V D V − − − = ⋅ − − = ⋅ (4.1)
其中 D 為輸入數值資料,D=0 ~ 4095(12-bits),n=12,所以式(4.1)可寫為 2048 ( ) 2048 OUT REF D V =V ⋅ − (4.2) 表4.3:AD5445數位類比轉換表
Digital Input Analog Output(V)
1111 1111 1111 +VREF(2047 / 2048)
1000 0000 0000 0
0000 0000 0001 −VREF(2047 / 2048)
0000 0000 0000 −VREF(2048 / 2048)
AD5445 資料的讀取為並列形式,其時序圖如圖 4.18 所示,動作說明如下:
1. 當 CS 腳位與 R/W 腳位同時為 low 準位時,AD5445 開始讀取並列資料(Parallel data) 並將資料寫入 Input Latch。
2. 當 CS 腳位為 low 準位,R/W 腳位為 high 準位時,AD5445 讀取 DAC 暫存器內容值 並轉換成類比輸出。 圖 4.18:AD5445 控制時序圖 在實際電路功能的驗證上,將 DA 的控制程式載入 FPGA 晶片中,利用 QuatusII 的 SignalTapII 功能將輸出至 DA 的 cmd_out 訊號(弦波)抓回來,其數值如圖 4.19 所示。將 輸出至 DA 的 cmd_out 數值作圖,如圖 4.20(a)所示。利用示波器量測 DA 轉換後的類比 輸出波形,可以觀察到 DA 電路確實可以把數位的弦波訊號轉換成類比訊號,如圖 4.20(b) 所示。可以驗証 DA 電路的功能及控制程式皆正確。
圖 4.19:輸出至 AD5445 的數位訊號 圖 4.20: (a)將輸出至 AD5445 的數值作圖 (b)示波器量測 AD5445 轉換後的類比訊號
4.4.2 音圈馬達驅動電路-放大器(OPA177)與緩衝器(BUF634)
由於數位轉類比電路(D/A Converter)轉換後的類比控制訊號為提供控制電壓的大 小,但卻無法產生足夠的電流對音圈馬達線圈進行推動,因此利用將放大器設計為電壓 追隨器的形式,再透過能產生大電流輸出的緩衝器(BUF634)產生足夠的驅動電流,對音 圈馬達線圈架構進行驅動,其電路示意圖如圖 4.21 所示,其電路接線圖如圖 4.22 所示。 但為了避免驅動電壓過大造成音圈馬達燒毀,因此在程式設計中加入限壓條件判定以確 保馬達不致損毀。 圖 4.21:音圈馬達驅動電路示意圖圖 4.22:音圈馬達驅動電路接線圖
4.4.3 類比轉數位電路(A/D Converter AD7896)
類比轉數位電路(A/D Converter)主要功能是將經過位準調整後的磁阻感測器訊號進 行類比輸入,並轉換為可被 FPGA 晶片讀取的數位值,其 IC 型號為 AD7896,是一顆取
樣快速且精度為 12 位元的串列式類比數位轉換 IC,類比轉數位之轉換速率為100KHz(每
秒 10 萬筆資料),其類比輸入範圍為 0V 至VDD,轉換時間為 8 sμ ,資料的讀取與傳輸為
串列形式。
AD7896 共有 8 個 Pin 腳,圖 4.23 為 AD7896 腳位與功能方塊圖,各腳位的說明如 表 4.4 所示。其電路接線如圖 4.24 所示。
圖 4.24:AD7896 電路接線圖
表4.4:AD7896各腳位功能表
Pin No. Mnemonic Description
1 V IN Analog input.The analog input range is 0V to VDD.
2 VDD Positive supply voltage. 2.7V to 5.5V.
3 AGND Analog ground.
4 SCLK Serial clock input.
5 SDATA Serial data output.Serial data from AD7896 is provided at this output.
6 DGND Digital ground.
7 CONVST Convert start.Edge-triggered logic input.
8 BUSY The BUSY pin is used to indicate when the part is doing a
由於 AD7896 是 12 位元的類比數位轉換 IC,因此若類比輸入範圍為 0V 至 3.3V, 轉換後的數位值其每一位元約為 0.806mV(3.3V/4096),表 4.5 為 AD7896 之類比數位轉 換表。
表4.5:AD7896類比數位轉換表
Analog Input Code Transition
3.299194V 111...110 to 111...111 3.298389V 111...101 to 111...110 3.297583V 111...100 to 111...101 0.002417V 000...010 to 000...011 0.001611V 000...001 to 000...010 0.000806V 000...000 to 000...001
AD7896 的轉換動作首先為對類比訊號進行取樣(High Sampling Performance),其時 序圖如圖 4.25,詳細的動作說明如下:
1. 控制 CONVST 訊號由 High 變 Low 產生負緣觸發以驅動 AD7896 開始轉換。
2. BUSY 由 Low 變 High 代表 AD7896 開始轉換,轉換時間為 8 sμ ,轉換完畢後 BUSY
由 High 變 Low。
3. 轉換完成後,輸入 16 個方波至 SCLK 使 AD7896 內部配合時序輸出 12bits 資料。
圖 4.25:Timing Operation Diagram for High Sampling Performance
當 轉 換 完 成 後 , AD7896 即 開 始 以 串 列 形 式 讀 取 轉 換 後 的 數 值 資 料 (Data Read Operation),其時序圖如圖 4.26,動作說明如下:
1. SCLK 共 16 個方波,分成前 4 個方波及後 12 個方波兩部份,前 4 個方波為接收資 料的準備時間,送出 4 個 0。
2. 後 12 個方波則是 SDATA 於每個方波週期送出一個位元資料,由 MSB 先傳。 3. 其餘時刻輸出腳位的狀態為 Tri-State。
圖 4.26:Data Read Operation
在實際電路功能的驗證上,將 AD 的控制程式載入 FPGA 晶片中,以示波器量測 AD7896 的訊號,可以看到當 CONVST 訊號發生負緣觸發時,BUSY 訊號即正緣觸發, 開始進行轉換的動作,如圖 4.27(a)所示。接著利用訊號產生器輸入一大小為 400mv~3V, 頻率為 200Hz 的弦波至 AD7896 的類比輸入腳位V 。如圖 4.27(b)所示。利用 QuatusIIIN 的 SignalTapII 功能將 AD 轉換後的訊號抓回來,其數值如圖 4.28 所示。將 AD 轉換後 的數值作圖,可以觀察到 AD 電路確實可以把類比的弦波訊號轉換成數位訊號,如圖 4.29 所示。可以驗証 AD 電路的功能及控制程式皆正確。 圖 4.27: (a)CONVST 與 BUSY 腳位的電壓波形 (b)訊號產生器輸入至 AD7896 的弦波波形
圖 4.28:AD7896 轉換完成的數位訊號數值 0 100 200 300 400 500 600 500 1000 1500 2000 2500 3000 3500 4000 samples va lu e AD data 圖 4.29:將 AD7896 轉換完成後的數值做圖
4.5 磁阻感測訊號處理電路(MR_Signal_Processing Circuit)
4.5.1 低功率儀表放大器(INA322)與放大器(OPA4364)
磁阻感測訊號處理電路主要是對磁阻感測器的輸出訊號進行調整及濾波,先將感測 器的輸出訊號與其輸出偏壓進行比較,將訊號的偏壓位準調整至 1.6V,經由放大及濾波 電路,濾除其高頻雜訊並放大訊號的振幅,再經由位準的調整使其放大後訊號的範圍介 於 0.5V 與 2.7V 之間符合類比轉數位電路(AD7896)可接受的類比輸入電壓範圍,其電路 架構如圖 4.30,利用此處理電路可以調整感測訊號的偏壓位準及振幅大小並濾除高頻雜 訊。其中 INA322 為低功率消耗儀表放大器,其放大倍率可經由外接電阻搭配進行決定。圖 4.30:感測訊號處理電路
綜合以上各部份電路的功能與驗證,音圈馬達系統其外部電路板的電路設計圖如圖 4.32 所示,電路佈線(PCB Layout)圖如圖 4.33 所示,實際外部電路板如圖 4.34 所示,實 際的系統硬體架構如圖 4.35 所示
圖 4.33:音圈馬達外部電路佈線圖(PCB Layout)

![圖 2.2:摩擦力區間與速度關係圖[1] 在實際的物體運動過程中所受到的摩擦力現象,遠比古典靜態摩擦力模型單純的由 黏滯摩擦以及動靜摩擦力組合的行為還來的複雜許多,因此許多的學者透過觀察及記錄 摩擦現象的變化提出能夠描述這些現象的數學模型[2][7][8],(2.3)式是摩擦力與位移之 間的遲滯關係,如圖 2.3 所描述的現象與物體處於靜摩擦力區間時所產生的 pre-sliding displacement 現象近似[7]。 [1 sgn( )]ff fcdTTdxT vσ α=− (2.3) 其](https://thumb-ap.123doks.com/thumbv2/9libinfo/8757191.207196/22.892.338.599.119.334/在實際力組合及記摩擦現象變化提出能夠描述這些現象模型現象近似.webp)