行政院國家科學委員會專題研究計畫 期中進度報告
虛擬實境之多媒體影音控制技術開發(1/3)
計畫類別: 個別型計畫
計畫編號:
NSC91-2213-E-009-145-執行期間: 91 年 08 月 01 日至 92 年 07 月 31 日
執行單位: 國立交通大學電機與控制工程學系
計畫主持人: 林進燈
報告類型: 精簡報告
報告附件: 出席國際會議研究心得報告及發表論文
處理方式: 本計畫可公開查詢
中
華
民
國 92 年 5 月 23 日
虛擬實境之多媒體影音控制技術開發(1/3)
計畫編號:NSC91-2213-E-009-145-執行期限:91.8.1-92.7.31
主持人:林進燈
國立交通大學
教授
執行機構:國立交通大學電機與控制工程研究所
一、前言
本計畫為「虛擬實境之多媒體影音控制技術開發」
,研發重點在於結合各種
電機資訊與人工智慧等科技,讓虛擬實境系統具備有智慧型的反應能力,研究的
方向有虛擬實境多媒體系統的影像控制、音訊控制與通訊等三項技術的開發與研
究。在本期的計畫中,就音訊控制技術開發的部份,包括「不特定語者語音辨識
系統核心辨識器」與「環場音效系統之研究」
,這裡將針對此兩項主題進行進度
報告。關於不特定語者語音辨識系統核心辨識器的部份,主要是研發一技術
---generalized common-vector (GCV) approach,以解決不特定語者辨識的問題,其
重點在於對語音特徵進行特徵分析(eigenanalysis),並去除語者相關的部份,同時
結合決策樹分析以解決前後音相關的問題。關於環場音效系統之研究,主要是探
討如何去模擬任一空間中音場之響應並研發相關技術,並將此一技術結合杜比
5.1 聲道系統,創造出虛擬的環場音響聆聽效果。以下將分別針對此二主題進行
說明
二、不特定語者語音辨識系統核心辨識器
Abstr actA new speech recognition technique is proposed for continuous speech-independent recognition of spoken Mandarin digits. One popular tool for solving such a problem is the HMM-based one-state algorithm. However, two problems existing in this conventional method prevent it from practical use on our target problem. One is the lack of a proper selection mechanism for robust acoustic models for speaker-independent recognition. The other is the information of intersyllable co-articulatory effect in the acoustic model is contained or not. In this paper, we adopt the principle component analysis (PCA) technique to solve these two problems. At first, a generalized common-vector (GCV) approach is developed based on the eigenanalysis of covariance matrix to extract an invariant feature over different speakers as well as the acoustical environment effects and the phase or temporal difference. The GCV scheme is then integrated into the conventional HMM to form the new GCV-based HMM, called GCVHMM, which is good at speaker- independent recognition. For the second problem, context-dependent model is done in order to account for the co-articulatory effects of neighboring phones. It is important because the co-articulatory effect for continuous speech is significantly stronger than that for isolated utterances. However, there must be numerous context-dependent models generated because of modeling the variations of sounds and pronunciations. Furthermore, if the parameters in those models are all distinct, the total number of model parameters would be very huge. To solve the problems above, the decision tree state tying technique is used to reduce the number of parameter, hence
reduce the computation complexity.
Intr oduction
Automatic speech recognition (ASR) is useful as a form of input. It is especially useful when someone's hands or eyes are busy. It also allows people with handicaps such as blindness or palsy to use computers. Because of the potential applications mentioned above, we attempt to develop a speaker-independent automatic speech recognition system for Mandarin digits.
In recent years, most automatic speech recognition technologies were based on the so-called Hidden Markov Models (HMM) and used the connected word pattern matching method to achieve continuous speech recognition. There exists many methods to solve the connected word
pattern-matching problem. One well-known method is called one-state algorithm. There are two problems in continuous speech recognition based on the one-stage algorithm, one is how to build a reference model to characterize the acoustic feature of speech signal, the other is the information of intersyllable co-articulatory effect in the acoustic model is contained or not.
Due to the first problem mentioned above, the one-state algorithm is sensitive to the reference patterns, and thus the choice of reference patterns is important. One well-known and widely used statistical method of characterizing the spectral properties of the frames of a speech pattern is the HMM approach. The better the HMM models the acoustic signals, the better performance the one-state algorithm can achieve. One of the most important issues of speaker-independent (SI) speech
recognition system is the estimation of robust speech model over different speakers. The statistical speech models for each phone unit of the recognition system should be estimated to cover the spectral variations in speech signal caused by intra-speaker differences. In this thesis, we propose a new
framework of HMM called generalized common-vector-based HMM (GCVHMM) as a reference for
speaker- independent automatic speech recognition.
For the second problem, context-dependent model is done in order to account for the co-articulatory effects of neighboring phones. It is important because the co-articulatory effect for continuous speech is significantly stronger than that for isolated utterances. However, there must be numerous context-dependent models generated because of modeling the variations of sounds and pronunciations. Furthermore, if the parameters in those models are all distinct, the total number of model parameters would be very huge. To solve the problems above, the decision tree state tying technique is used to reduce the number of parameter, hence reduce the computation complexity.
GCVHMM
The statistical speech models for each phone unit of the speaker-independent (SI) recognition system should be estimated to cover the spectral variations in speech signals caused by intra-speaker differences. Gülmezoðlu, et al. proposed a common vector approach (CVA) for SI isolated word recognition. In CVA, a common vector that represents common properties of one specific spoken word is obtained by estimating a common subspace. However, CVA needs the impractical assumption that the training data form a set of linearly independent vectors.
In this chapter, we generalize the CVA to relax its constrain and propose a new extension of HMM
called generalized common-vector- based HMM (GCVHMM). There are two phases in the GCVHMM,
extraction of robust features and estimation of HMM. In the first phase, a generalized CVA is developed based on the eigenanalysis of covariance matrix to extract an invariant feature, called generalized common vector (GCV). To relax the linearly independent assumption in the original CVA, we divide the eigenvalues of covariance matrix into two sets such that all the eigenvalues of the first set are greater than those of the second set. The common vector is obtained by projecting feature vectors on the subspace spanned by the eigenvectors whose corresponding eigenvalues are in the second set. In the second phase, the GCVs are used for the estimation of continuous observation density in HMM and form the so-called GCVHMM. In GCVHMM, in addition to the original elements of a traditional HMM,
a new element, GCV transformation matrix, is added to extract GCV from speech feature vectors.
Finally, a re-estimation algorithm based on Baum-Welch method to estimate all the parameters of GCVHMM is derived.
Str uctur e of GCVHMM
In this thesis, a N state, left-to-right continuous observation density HMM, denoted as Ω, is
considered. The initial probability for state i is denoted byδi =P(θ0=i), 1≤ i ≤N, and the transition
probability from state i to state j byai,j=P(θt= j|θt-1= i) for 1≤i, j≤N. Denote
{ }
1N i i
{ }
, , 1N i j i j
A= a = . For the calculation of the observation density in state i, denoted as bi(ot), for observation
ot, the generalized common vector of ot given the matrix transformation of generalized common vector
is first extracted. Then bi(ot) =P(ot|θt=i), 1≤i≤N assumed to be a mixture of Gaussians is then given
as
( )
, , 1 ( ) , 1 M i t i k i k t k b o c b o i N = =∑
≤ ≤where M is the mixture number, ci,k is the probability of mixture k in state i, and bi,k(o) is the gaussian
distribution given by 1 , , , , , , , 1 ( ) ( ) 2 , , 1 ( ) ( 2 ) t i k i k i k t i k i k s y y i k t D i k b o e η η π − − − Λ − = Λ
where Ds=D-Dg is the dimension of the extracted GCVyt,i,k from ot, yt,i,k is the GCV of ot for mixture k
in state i, and Λi,k and ηi,k are the covariance matrix and mean vector corresponding to mixture kin state
i, respectively. Λi,k is assumed to be diagonal, i.e.,
, ,1 , ,2 , , , 0 0 0 0 0 0 s i k i k i k i k D σ σ σ Λ = L L M M O M L so that -1 1 , 1 , , s D i k l σi k l − =
Λ =
∏
. The GCVyt,i,k from ot for mixture k in state i is defined as, , , ,t t i k i k o y =V where , , ,1, , ,2,..., , , s T i k i k i k i k D V = v v v
is matrix transformation of generalized common vector for mixturek in state i. For convenience in the
following derivation, we also define
, , ,
i k Vi k i k
η = µ
then we can write
(
)
, , , , , , , t i k t i k i k i k t i k z = y −η =V o −µ Denote{ }
1 N i i B= b = and Ω= {δ, A, B}.Reestimation algor ithm for the par ameter s of GCVHMM
For an observation sequence O= (o1, o2, … , oT) unobserved state sequence Θ = (θ0, θ1,θ2, … ,
θT), and unobserved mixture component sequence K= (k1,k2, … ,kT), the joint probability density of
P(O,Θ,K|Ω) is defined as
(
)
0 1, , , 1 , , | ( ) t t t t t t T k k t t P O K δθ aθ− θ θc bθ o = Θ Ω =∏
where T is the number of observation in O. It follows that the likelihood of O given Ω has the form
(
|)
( , , | )K
P O P O K
Θ
Ω =
∑∑
Θ Ωwhere the summations are over all possible state sequences and mixture component sequences.
Given an observation sequence O, the objective is to maximize P(O|Ω) over all parameters inΩ. It
is, however, difficult to solve this problem by directly maximizing P O( |Ω) over Ω. In this following,
we shall use the EM algorithm to estimate the parameters of HMM. The EM algorithm is a two-step iterative procedure. In the first step, called the expectation step (E step), we compute the auxiliary function for the equation
( , ') ( , , | )log ( , , | ')
all all K
Q P O K P O K
Θ
ΩΩ =
∑∑
Θ Ω Θ ΩIn the second step, called the maximization step (M step), we find the value of Ω' that maximizes
Q(Ω,Ω'), i.e.,
'
arg max ( ,Q ')
Ω
It has been shown that if Q(Ω,Ω')≥Q(Ω,Ω), then P(O|Ω')≥P(O|Ω). Therefore, iteratively applying the E and M steps of equations guarantees monotonic increase in the likelihood. The iterations are continued until the increase in the likelihood is less than some predetermined threshold.
From the following decomposition: log ( , ,P O Θ K|Ω =')
0 1
' ' ' '
, , ,
1 1 1
log log log log ( )
t t t t t t T T T k k t t t t a c b o θ θ θ θ θ δ − = = = +
∑
+∑
+∑
it is straightforward to shown that Q(Ω,Ω') can be decomposed into a sum of four auxiliary functions:
{ }
' , 1 1 ( , ') ( , ') [ , ] i N N a i j j i Q Qδ δ Q a = = Ω Ω = Ω +∑
Ω{ }
' , 1 1 [ , ] j N M c j k k j Q c = = +∑
Ω ' , 1 1 ( , ) N M b j k j k Q b = = +∑∑
Ω where ' 0 1 ( , ') ( , , | ) log N i i K Qδ δ P Oθ i K δ = Ω =∑∑
= Ω{ }
' ' , 1 1 , 1 1 [ , ] ( , , , | )log i N T N a i j j t t i j j t K Q a = P Oθ− iθ j K a = = Ω =∑∑∑
= = Ω{ }
' ' , 1 , 1 1 [ , ] ( , , | )log j M T M c j k k t t j k k t Q c = P Oθ j k k c = = Ω =∑∑
= = Ω ' ' , , 1 ( , ) ( , , | )log ( ) T b j k t t j k t t Q b P Oθ j k k b o = Ω =∑
= = ΩThis implies that the four sets of parameters can be independently maximized. The maximization results of first three auxiliary functions are
0 ( , | ) ( | ) i P O i P O θ δ = = Ω Ω 1 1 , 1 1 ( , , | ) ( , | ) T t t t i j T t t P O i j a P O i θ θ θ − = − = = = Ω = = Ω
∑
∑
1 , 1 ( , , | ) ( , | ) T t t t j k T t t P O j k k c P O j θ θ = = = = Ω = = Ω∑
∑
Substituting the following decomposition
' ' 1 ' ' 1 ' , , , , , , , 1 1 log ( ) (2 ) log( ) 2 2 2 t t t t t t t t t t T s k t k t k k t k D bθ o =− π + Λθ − − zθ Λθ −zθ where ' ' ' ' ' ,t,t ,t,t t,t t,t( t,t) t k t k k k t k zθ =yθ −ηθ =Vθ o −µθ for log , ( ) tkt t
bθ o and differentiating it with respect to '
, j k µ and ' 1 , , j k l σ − ,, we obtain 1 , 1 ( , , | ) ( , , | ) T t t t t j k T t t t P O j k k o P O j k k θ µ θ = = = = Ω ⋅ = = = Ω
∑
∑
' 2 , , , 1 , , 1 ( , , | ) ( , , | ) T t t t j k l t j k l T t t t P O j k k z P O j k k θ σ θ = = = = Ω ⋅ = = = Ω∑
∑
where ' , , , t j k l z is the lth element of ' , , t j k z .To obtain the solution for v'j k l, , , which is the lth element of v'j k, :
' ' , ,, , , 1, 1 j k l j k l s v v = ≤ ≤l D the constrains ' ' , , , , , , 1 1 ( , 1) 2 s D i k l j k l j k l l v v ρ = −
∑
' , ' , , ( , ) 0 b j k j k l Q b v ∂ Ω = ∂ r we obtain , , , , , , , j k j k l j k l j k l R v =ε v where ' ' , , , 1 ( , , | )( )( ) T T j k t t t j k t j k t R P Oθ j k k o µ o µ = =
∑
= = Ω − −It can be said that Rj,k characterizes the variations for mixture k in state j so that it plays the same
role as ΦX in previous section. Thus, the eigenvectors of Rj,k corresponding to the eigenvalues of
smallest Ds are selected to constitute the GCV matrix transformation for mixture k in state j.
A Hybr id Decision Tr ee
To overcome this limitation, we have introduced the integrated generalized common vector approach into the conventional HMM in chapter 3, which is better at speaker-independent recognition because of its ability to extract common invariant features over different speakers. Besides modeling acoustic parameters, most of the variations are due to consistent contextual effects in practice.
Therefore, we can focus our research on context-based information. Since the co-articulatory effect for continuous speech is significantly stronger than that for isolated utterances, it is important to study the modeling of context-dependent “subword” units. Here, “subword” means “Mandarin digits”, which indicate syllable equally.
The most important reason why we use the method of decision tree state tying is that the total number parameters in all models is prohibitively large. The computation complexity to train all these parameters would be intolerable. To reduce the total number of model parameters, one approach is to reduce the number of parameters in each model. The way of using continuous HMMs with tied parameters, parameter tying, reduces the parameter count while maintaining the model accuracy, and is popularly used in most ASR systems.
After incorporating common vector features mentioned with the structure of decision tree state tying, the decision tree algorithm should be modified as follows:
1. Locate a (small) set of left context digit syllable questions manually.
2. For each center Mandar in digit syllable p:
nEstimate all left context digit syllable GCVHMMs.
nFor each Markov state k in the model topology, classify all the k-th output distribution in all left
context digit syllables using a binary tree.
a)Put all the tr aining data in k-th state of all left context digit syllables into the r oot node.
b)Classify all the tr aining data by each question in the question set. Using the cluster ed
data to gener ate Gaussian distr ibution of common featur es by the method of GCVHMM intr oduced in Chapter 3. Then compute the likelihood of the par ent node fr om Equation (4.15): ( )
(
)
( )
, ( ) 1 1 ln 2 ln 2 S i k i t i L= − D + π + Λ ⋅∑∑
ϒ twher e DS and
Λ
i k, r epr esent the dimension and the covar iance matr ix of commonvector after the method of GCVHMM.
c)Split the node by each question in the question set. By splitting, some tr aining data that
come fr om the left context digit syllables which answer yes to the question go to the yes-child node; those which answer no to the no-child node. Then calculate the ever y likelihood of two child nodes. Finally, compute the likelihood incr ement by each question in the question set.
d)Find the best question in the question set by computing the most likelihood incr ement for
each of the newly cr eated childr en.
Third States of * - 0 Question 1 Question 2 Question 3 Yes Yes Yes No No No 4 - 0 5 - 0 9 - 0 silence - 0 6 - 0 8 - 0 1 - 0 3 - 0 7 - 0 0 - 0 2 - 0 4 - 0 1 - 0 8 - 0 etc. .... Third States of 0 Second States of 0
First States of 0 Fourth States of 0 Fifth States of 0
GCVHMM of digit syllable "0"
Mandar in Digits Recognition Exper iments
The speech data used in our experiments are the set of continuous Mandarin digits. We use a speech database from 20 persons including 10 males and 10 females. Each one speaks 10 times of each
Mandarin digit. The recording sampling rate is 8kHz and stored as 16-bit integer. Balanced Cor por a
Digit Model Decision Tree State Tying Based on GCVHMMs GCVHMMs HMM 0 91.667 83.333 58.333 1 61.111 27.778 0.000 2 61.538 53.846 76.923 3 100.000 89.474 100.000 4 83.333 50.000 50.000 5 100.000 94.118 100.000 6 60.000 30.000 0.000 7 100.000 46.154 7.692 8 86.667 40.000 60.000 9 100.000 69.231 23.077 Aver age 84.432 58.393 47.603
Unbalanced Cor por a Digit Model Decision Tree State Tying Based on GCVHMMs GCVHMMs HMM 0 75.610 65.854 53.659 1 66.522 76.087 28.261 2 72.727 54.545 54.545 3 84.091 56.818 90.909 4 93.182 100.000 88.636 5 81.818 97.727 95.455 6 75.556 51.111 80.000 7 95.455 100.000 95.455 8 93.182 77.273 90.909 9 90.909 95.455 95.455
Average 82.9052 77.487 76.419 Balanced Tr ee Digit Model Balanced Decision Tree State Tying Based on GCVHMMs Unbalanced Decision Tree State Tying Based
on GCVHMMs 0 75.610 51.220 1 66.522 34.783 2 72.727 63.636 3 84.091 68.182 4 93.182 86.364 5 81.818 77.273 6 75.556 64.444 7 95.455 88.636 8 93.182 77.273 9 90.909 90.909 Aver age 82.9052 70.272 Conclusion
To consider the contextual effects of continuous speech that play an important role in Mandarin, we combine a method of the Decision Tree State Tying with GCVHMM. The balanced corpora mean that the count of females and males in the database are equivalent entirely. It shows 26.039% improvement when we replace GCVHMM with Decision Tree State Tying based on GCVHMM. Nevertheless, if the database is unbalanced, the performance comparison shows 5.4% improvement by employing the Decision Tree State Tying based on GCVHMM. To overcome leaving the major part of models behind in the unbalanced tree, we modify the tree as the balanced tree. We can find that the results show 12.6332% improvement by employing the balanced decision tree state tying based on GCVHMM.
二、環場音效系統之研究
Abctract
The earliest multichannel reproduction system format was brought up for theatre by Dolby Liboratories Inc in 1950s. The main difference between the conventional stereo (two or three dimension) and multichannel sound system is the setup of surround sound channel. The main purpose of surround channel is to produce the effect of liveness, sense of envelopment, and wide spatiality.
We generate different quality of audio sound sources by a room effect emulator, and then turn the conventional stereo into 5.1 channel sound system by a modified Dolby Surround decoder. We further introduce the concept of room effect impulse response in different room-dimension, and use
multi-bands equalizer to generate many kinds of music impression for the multichannel sound system. The total system is a 5.1 channel Multi-band room effect emulator. By the system, we can get a full and a live listening experience.
Introduction
Today, 5.1 channels reproduction system have been frequently used in cinema or home video. One of our purpose is to turn a convention stereo sound into a 5.1 channel sound.
To many people, the term surround implies that something new has been added to a stereo [1] audio
signal something requiring more than two speakers for reproduction. In 1970’s, Dolby Stereo was established as a stereophonic reproduction system having from three to as many as six channels of sound to enhance the action and drama of theatrical presentations in ways only approached by two-channel systems. The most obvious feature of Dolby Stereo is that an additional channel of sound is reproduced along the sides and back of the theatre to "surround" the audience with sound. Dolby
incarnations, and more usually, with a centre or ‘dialogue’ channel. These four channels are encoded down to two recorded or transmission channels, and decoded in the cinema for playback. In the mid 1980’s a consumer version of the Dolby Stereo format was developed, called Dolby Surround. One of the main works is to study Dolby surround and generate stereo surround, and then a modified structure,
a 2- to- 5.1 channel sound system, is built. [3][4]
In this thesis, we propose a 5.1 channel Multi-band room effect emulator with friendly control
interface. In order to get different music quality, we introduce the concept of room simulation and
equalizers into a 5.1 channel sound system.
About room simulation, the impulse response is the result of the many reflections of a sound that occur in a room, and consist in three part, direct signal, early reflections, and fused reflections. The first software implementations of room simulation algorithms were carried out in 1961 by Schroeder. Then an extension of the Schroeder algorithm was by Moorer in 1978. A reverberator introduces a spatial dimension to a piece of recorded sound, which means that it can be used to model a specific acoustic environment in which to affect a dry unaltered signal. Long reverberation times provide the feeling of a large hall, while short reverberation times give the impression of smaller rooms. By a reverberator, we will get a fuller listening experience with spatiality. We referred the structure of Moorer’s reverberator
using FIR and IIR filters to make artificial reverberation called a Reverberator. An example impulse
response for a room is depicted in Fig 1.
Fig 1 Ideal impulse response of an acoustic room.
As for an equalizer, it offers the capability of both compensating for defects and fine tuning the system. With an equalizer, certain frequency ranges can be either increased or cut. Referring to a
software Winamp, we design a 10-band equalizer to control how finely the frequency pattern can be
amplified or attenuated, and we setup several selective modes for selection. At last, we use the concept of fuzzy logic in user interface.
Modified Surround Sound Decoder
The block diagram in Fig 2 shows how the decoder works. The Lt input signal passes unmodified
and becomes the left output. The Rt input signal likewise becomes the right output. Lt and Rt also carry the center signal, so it will be heard as a "phantom" image between the left and right speakers, and sounds mixed anywhere across the stereo soundstage will be presented in their proper perspective.
The L-R stage in the decoder will detect the surround signal by taking the difference of Lt and Rt, then passing it through a 7 kHz low-pass filter, a delay line, and complementary Dolby noise reduction. The surround signal will also be reproduced by the left and right speakers, but it will be heard
out-of-phase, which will diffuse the image.
Fig 2 Surround decoder block diagram
We modified the mono Dolby surround decoder into a simplified surround sound decoder for
generating stereo surround, which is shown in Figure 3. As the definition of surround sound described
above, this channel is just to present the reverberant effect and feeling of ambiance, but not to present location of sound sources. The terms L-R and R-L referred to Dolby Surround Decoder are to reduce the contents of front channel but not entirely (called leakage). In addition, surround sound sources, L-R and R-L, are out of phase with each other, so the surround channels will diffuse the image in surround
sound field. We also use the blocks, Audio Time Delay and 7 kHz Low-Pass Filter, which are described
above to make surround sounds more difficult to localize.
the usage of centre channel of cinema reproduction system, the bandwidth of the Band-pass filter is ranging from 20Hz to 20kHz (bandwidth of vocal).
will be introduced in Chapter 4. In the next chapter, we shall first describe the basic theory of room effect and basic components of an artificial reverberator.
Fig 3 Simplified Surround decoder.
Artificial Reverberator
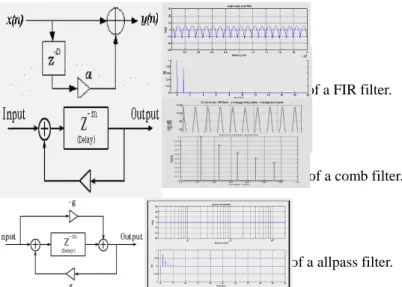
The inverse comb filter (FIR), comb filter (IIR) and all-pass filter (IIR) are the basic structures (Fig 4) that have been combined in different ways in an attempt to imitate the effects of various rooms.
Fig 5 shows the basic structure of an aitificial reverberator by Schroeder.
(a) The structure, time, and frequency domain of a FIR filter.
(b) The structure, time, and frequency domain of a comb filter.
(c) The structure, time, and frequency domain of a allpass filter. Fig 4 Basic components of an artificial reverberator.
Fig 5 Schroeder’s reverberator.
The eigenfrequencies of rooms have a rapid decay for high frequencies. [5][6] A
frequency-dependent reverberation time can be implemented with a low-pass filter. Thus Moorer (1978) suggested a modified comb filter with a lowpass filter in feedback loop to take frequency-dependent
decay into consideration (Fig 5).
Fig 6 Modified comb filter with Frequency-dependent decay. M Z− + X + X 1 − Z X(n) Y(n) a g
11 Ref_S cale : Reverberation length
BW : Bandwidth of LP D el2 : First reflection arrive tim e
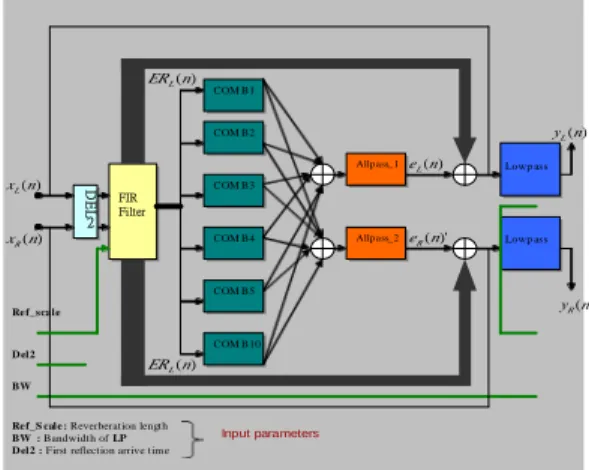
FIR Filter COM B10 COM B2 COM B3 COM B4 COM B5 Allp ass_1 Allp ass_2 COM B1 Lowp ass Lowp ass D E L 2 Ref_sca le BW D el2 ) (n eL )' (n eR ) (n xR ) (n xL ) (n yL ) (n ERL ) (n ERL ) (n yR Input parameters L o w -p a ss Ban k2 Ban k1
Ban k3 Par allel
All pass Filter 1 F IR Yl 1 W 2 W 3 W
According to the concept described above, we use an FIR filter to model early reflections, and an IIR filter that consist of 10 modified comb filters and 4 cascade allpass filters to model the late reflections (Fig 7).
Fig 7 Modified Moorer’s reverberator.
In Fig 7, the generated reverberant signals
e
L(
n
)
ande
R(
n
)
are added to the direct signals (x
L(
n
)
andx
R(
n
)
) and early reflections (ER
L(
n
)
andER
R(
n
)
), and the output signals are:)
(
n
y
Lx
L(
n
)
+ER
L(
n
)
+e
L(
n
)
.)
(
n
y
Rx
R(
n
)
+ER
R(
n
)
+e
R(
n
)
. : means that signal path the lowpass filterThe input of the room simulation is the mono signal
x
R(
n
)
andx
L(
n
)
respectively. Thesetwo mono input signals are added to the left and the right room signals after going through a delay line
Del2, and then go through another delay line (FIR Filter). The total sum of the early reflections made
by FIR Filter then goes to parallel circuit of comb filters and cascade allpass filters which implements
subsequent reverberation [6].
In order to obtain a high quality spatial impression, it is necessary to decorrelate the room signals
)
(
n
e
L +ER
L(
n
)
ande
R(
n
)
+ER
R(
n
)
.10-band Equalizer
Referring to the principles of critical bands [9] and Q equalizer design (1), we design a 10-band
equalizer in one octave (Table 1).
Q = fcentre / Bandwidth (1)
Frequency (Hz) Frequency (Hz)
Band
Low High Width Band
Low High Width
0 0 50 50 5 800 1600 800
1 50 100 50 6 1600 3600 1600
2 100 200 100 7 3600 7200 3600
3 200 400 200 8 7200 14400 7200
4 400 800 400 9 14400 22050 7650
Table 1 The low, high, and width frequencies of each band of the proposed 10-band equalizer
10
1
~
W
W
are the input weightings of the 10-bands equalizer, and we can change the weightingof every signal band to generate different kind of music impressions.
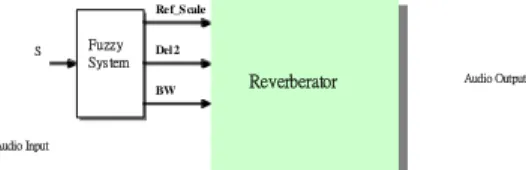
Reverberator Fuzzy System Fuzzy System Ref_S cale Del 2 BW Audio Input Audio Output S Fuzzy Inference System Lo-Freq Mid-Freq Hi-Freq 1 W 2 W 3 W 10 W Mode
Fig 8 The proposed multi-bands room effect simulator.
Fuzzy User Interface
We introduce the concept of fuzzy logic to generalize the input variables of the proposed
Multi-Bands Room Effect Eimulator, and build a fuzzy control system as a friendly interface.
the input parameters of the Multi-band room effect simulator can be further divided into two groups.
One group is for the decision of room_size, (Fig 9) and the other is for the decision of music
impressions. (Fig 10)
Fig 9 Fuzzification of the input parameters to the reverberator.
Fig 10 Fuzzy user interface for deciding the band weighting
Experimental Results and Conclusions
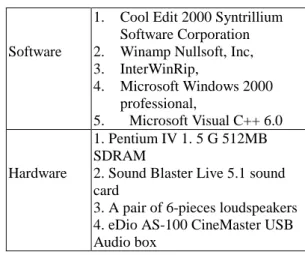
All the experiments were carried out in a general listening room. A PC based operation system
with a set of 5.1 channel sound system is required. The detail are listed in Table 2 below. Then we let
ten classmates grading (1 to 10) the sound effects generated by other room effect generators, and all the users are told the basic theory about room effect at first.
In this thesis, we implement a room effect generator in Visual C++ in a simple way, and then apply it into a 5.1 channel sound system. There are three main problems to be focused on in the future research:
Table 2 Environment requirement. 1. How to reduce the computation loading of FIR filter.
2. No ability to eliminate metallic sound effect.
3. The usage of Late Low-pass Filter is improper.
4. How to extract the vocal signal for the center channel.
One of the main problems is about the possibility of real-time processing. This is because that, in our structure, we use a high order FIR filter (more than 2000 orders) to model the early reflection segment, and it would take too much execution time for computing output signal. Lowering FIR order or developing another novel
structure will be an important job for real-time realization.
Another problem is about metallic sound effect in long reverberation time. Basically, the
Multi-Bands Room Effect Simulator won’t generate additional metallic sound effect in longer
reverberation time. The only case is that, if the original music was heard a little metallic somewhere, the effect still exist in the outputs of the simulator. In other words, the simulator has no ability to eliminate metallic sound effect. For this reason, we can further investigate the way to eliminate metallic sound.
Except to enhance rapid decay for high frequencies, the usage of Late Low-Pass filter is to add
the feeling of listening position from the stage. The more distant listeners sat, the deeper audio signal they heard. However the usage of enhancing rapid decay for high frequencies is not correct; it
suppresses eigenfrequencies of high frequencies unnaturally. Therefore, the late lowpass filter is
improper for acoustic effect of real situation. Thus we could find another way to model this feature. At last we can further investigate how to extract vocal signal from music in advance, and then we can use a Vocal Signal Extraction System to replace the block, Band-pass filter, to generate the center channel of our 2-to-5.1 channel sound system
Software
1. Cool Edit 2000 Syntrillium
Software Corporation
2. Winamp Nullsoft, Inc,
3. InterWinRip, 4. Microsoft Windows 2000 professional, 5. Microsoft Visual C++ 6.0 Hardware 1. Pentium IV 1. 5 G 512MB SDRAM
2. Sound Blaster Live 5.1 sound card
3. A pair of 6-pieces loudspeakers 4. eDio AS-100 CineMaster USB Audio box