Blind adaptive algorithm for demodulation of
DS/CDMA
signals with mismatch
H.-C.Hwang C.-H. Wei
Abstract: The minimum mean-squared error (MMSE) linear detector is known to be a near- far resistant strategy for direct-sequence code- division multiple access systems. The MMSE linear detector can be implemented adaptively by the MOE adaptation algorithm or the Griffiths’ adaptation algorithm, which utilises the desired signal vector for initial adaptation instead of training sequences. The performance loss caused by the imprecise knowledge of the desired signal vector is investigated. A new blind adaptive algorithm is presented to mitigate the effect of the mismatch caused by the timing error in acquisition. Several numerical results show that the new algorithm can provide a resistance to the effect of mismatch compared to the MOE and Griffiths’ algorithms.
1 Introduction
In direct-sequence code-division multiple access (DS/ CDMA) communication systems, each user transmits the symbol modulated upon a unique spreading sequence. The conventional matched correlator demod- ulates the transmitted symbol of a specific user by cor- relating the received signal with a synchronised replica of the spreading waveform of interest [l, 21. The opti- mal performance of reception can be achieved only when all spreading waveforms are orthogonal or only one user exists. However, the orthogonal property can- not be easily obtained, owing to random timing offsets between users in an asynchronous system. A nearby interfering user of large power will deteriorate the reception of the highly attenuated signal. The matched correlator is thus vulnerable to the so-called near-far problem, and the system capacity is limited by the mul- tiple access interference (MAI).
The minimum mean-squared error (MMSE) single- user detection technique [3, 41 is known to be an effec- tive strategy for mitigating the near-far problem by uti- lising the cyclostationarity of the highly structured MAI. This MMSE linear detector can be implemented by training sequences based adaptation algorithms [4] 0 IEE, 1999
IEE Proceedings online no. 19990284
DUI: 10.1049/ipcom: 19990284
Paper first received 27th November 1997 and in revised form 19th Octo- ber 1998
The authors are with the Department of Electronics Engineering and Center for Telecommunications Research, National Chiao Tung Univer- sity, Hsin-Chu, Tawian 300, Republic of China
or by the blind adaptation algorithms 15-81. The blind adaptation algorithms, the minimum output energy (MOE) algorithm and the Griffiths’ algorithm, utilise the desired signal vector instead of training sequences for initial adaptation. In the DS/CDMA communica- tion over the additive white Gaussian noise (AWGN) channel, the desired signal vector is merely the specific user’s spreading sequence, which is also required to implement the matched correlator.
Unfortunately, the perfect knowledge of the desired signal vector is not available when there is a timing error in acquisition. This mismatch will cause the MOE algorithm to adjust the linear detector in a wrong direction, such that the resultant detector will cause signal degradation and noise enhancement [5, 61. A constrained MOE (CMOE) algorithm [ 5 , 61 has been presented to solve this problem by introducing a con- straint on the norm of the tap-weight vector of the linear detector. Unfortunately, the Lagrange multiplier determining the constraint cannot be automatically decided to achieve a compromise between larger toler- ance to mismatch and interference suppression capabil- ity. In [7], the author proposed an inverse filtering method based on the MOE approach for blind demod- ulation of DYCDMA signals in the presence of multip- ath. Some additional constraints are made to reject other multipath components of the desired user in order to avoid the signal cancellation. However, the algorithm does not utilise the multipath diversity, which is commonly used to improve the performance of reception in the RAKE receiver.
In this paper, the effect of mismatch caused by the timing error on the MOE and Griffiths’ algorithms is investigated and compared. To mitigate the effect of mismatch, we present a new blind adaptive algorithm for near-far resistant DS/CDMA demodulation in the presence of timing error. The proposed receiver consists of three parallel Griffiths’ filters and the decision statis- tic is formed by linearly combining the output of the filters. In addition, the new algorithm can result in the estimation of the timing error adaptively, which can be useful for the tracking loop. The convergence speed of the Griffiths’ algorithm can be accelerated using a vari- able step-size scheme [9]. Thus, the new blind algorithm is useful in practice. In [lo, 111, authors developed the methods of near-far resistant estimation for the code timing. The emphasis of our paper, however, is the effect of the timing error on the near-far resistant demodulation.
2 Theoretical background
2.
I Asynchronous DS/CDMAIn a DS/CDMA communication environment with K active users, the kth user transmits the antipodal 29
symbol bk[ll E {-1, +1} with amplitude A k as follows:
03
r k ( t ) = A k b k [ j ] S k ( t - j T b - ' T k ) C O S ( U c t
+
6 k )3 = - 0 0
(1)
where 0,. is the carrier frequency, Tb is the symbol interval, Zk is the time delay and 0, is the carrier phase
relative to the receiver. To share the same frequency spectrum, each user is assigned with a unique spreading waveform given by:
N - 1
s k ( t ) = a k [ n ] n ( t -
~ T c )
(2)n = O
where ak[n] E { + I , -1) is the nth element of the spread- ing sequence for the kth user and the chip waveform
n(t)
is usually a rectangular waveform of unit-ampli- tude and duration T,. In general, T, is assumed to beTbIN and N is the processing gain. The received signal
is then of the form r ( t ) = Z E l r k ( t )
+
x ( t ) where x ( t ) is AWGN.If the double frequency terms are ignored, the equiv- alent baseband sample at the output of the chip- matched filter can be expressed as:
K (m+l)T,
r [ m ] =
1
/
r k ( t ) ' 2cos(U,t)dt
+
z[m] ( 3 ) m T,where x[m] is the noise sample. Since E [O, Tb), the delay relative to the receiver can be written as Z~ = (ak
+
&)T,, where 0 5 n k I N - 1 is an integer and 6, E [0, 1). The samples within one observation interval of length Tb, [r[iNl,...,
r[(i+
l)N - 111, can thus beexpressed as a vector: k=l K r(j) b k [ j -
l]vL1
f b k [ j ] V t+
x ( j )(4)
k=l where V i 1 = A k{
( 1 - d k ) T F - n k a k+
b k T F - n k - l a k } v: = AI,{
(1 - G k ) T ; " a k+
G I , T G k + ' a k }and ak = [ak[O], a k [ l ] ,
...,
ak[N - l]lT. In the aboveexpression, x(i) is the AWGN vector and the terms cos(Ok) are absorbed into Ak. Note that TLn and TRn are the acyclic n-shift operators, which shift the ele- ments of a vector to left and right acyclically, respec- tively.
2.2
Equivalent channel model
Taking the first user to be the desired transmission (therefore, 2, = 8, = 0), it is convenient to describe the asynchronous
DSKDMA
channel by the following equivalent synchronous model as follows:L
r ( j ) = b l [ j ] A l U l
+
h [ j l A l U l+
x(j) (5)1=2
where bl[l'l is the desired symbol modulated by the desired signal vector u l , and bib], for 2 I
I
I L, are interfering symbols due to intersymbol interference and multiple-access interference and ul are the interference vectors modulating these symbols with amplitude A l . Note that, when z1 = 0, the desired signal vector is equal to the spreading sequence of the desired user, that is, u1 = a l .30
For this equivalent channel, the signal-to-noise ratio
(SNR) is defined as SNR = A1211u1112/s?, where
d
is the variance of AWGN samples. Since llu1112 depends onthe delay
r1,
for simplicity, we define the SNR to be the one corresponding to a symbol- and chip-synchronous system. That is, SNR = NA12/s?. Throughout all exper- iments in the subsequent Sections, each interfering user is assumed to have equal power and the near-far ratio (NFR) denotes the ratio of the power of each interfer- ing user to the power of the desired user.The MMSE linear detector_ demodulates the trans- mitted symbol of interest as bl[ll = sgn(wTr(i)), where the FIR filter w minimises the mean-squared error [3, 41 (MSE) between the desired symbol and the test sta- tistic as follows J = E{(b,b] - wrr(i))2}. Since the bits
bl[l'l are uncorrelated, the optimum tap-weight vector is given by
where
R
I= E{r(i)rT(i)} and p = E{blb]r(i)} = A l u l arethe correlation matrix of the received signal vectors and the cross-correlation between the desired symbol and the received signal vector, respectively. When the inter- ference is stationary, the correlation matrix R is posi- tive definite and nonsingular, and the optimum tap- weight vector is unique.
W, = R - l p ( 6 )
2.3 Blind adaptation algorithms
The MOE and Griffiths' algorithms are the commonly used blind adaptation algorithms for near-far resistant demodulation. Their adaptation equations are described briefly below.
The MOE algorithm [ 5 , 61 decomposes the impulse response of a linear detector into the sum of two orthogonal components: w = u1
+
v, in which u1 is the matched filter corresponding to the desired user and vis an adaptive filter. The linear detector intends to min- imise the mean output energy:
M O E ( V )
=E
{
(wTr(j)I2}(7)
subject to ulTv = 0. Due to this constraint, the output energy due to the desired user is transparent to the choice of v, and the resultant detector is expected to suppress the interference while preserving the desired signal. To satisfy the constraint ulrv = 0, the stochastic gradient-descent adaptation rule must find the projec- tion of the gradient of the output energy on the linear subspace that is orthogonal to ul. The adaptation equa- tion is thus given by:
where p is the step size, z(i) = w(i)Tr(i) is the output of
the MOE receiver and
z M A )
= uITr(i) is the output of the matched correlator.The Griffiths' algorithm [8, 131 is an approximate implementation of the method of steepest descent like the least mean-squared (LMS) algorithm [ 141. Utilising the property of p = Alul and replacing the correlation matrix R with the instantaneous estimate r(i)rT(i) yield the adaptation equation given by:
where p is the step size and z(i> = wr(i)r(i) is the output of the detector. If the step size is sufficiently small [12], the Griffiths' algorithm will make the adaptive detector converge to w, = R-'ul, which is a scaled MMSE solu- tion. The scaling will not affect the binary decision of the transmitted symbol so the amplitude A l is not required to be estimated during the adaptation.
v ( j
+
1) = v ( j ) - w ( j ) [ r ( j ) - K w w U 1 1 (8)w ( j
+
1) = w(j)+
d u 1 -4 M j ) l
(9)3 Mismatch
We assumed in Section 2 that the desired signal vector is merely the spreading sequence of interest. This may not be true when there is a timing error in acquisition. The relationship between the timing error and the desired signal vector can be illustrated in Fig. 1. When the clock of the receiver leads that of the transmitted symbols by S1Tc (0 I
6,
I l), the desired signal vector can be expressed by:u 1 = (1 - &)a1
+
61TAal
(10) Alternatively, when the clock of the receiver lags behind by 6,TC (0 I 6, 5 l), the desired signal vector can be expressed by:u 1 = (1 - &)al
+
S1T;al (11)The desired signal vector is thus a linear combining of the spreading sequence of interest and its shift version. If al is used as the nominal desired signal vector, the mismatch causes the performance loss to the blind algorithms. bi ti-11 b, [il . . . - . - . . . . .
nt
... ...r - I
.. ..: c t . . . . . . . . signal ' ;ST,- tagging?t t t t t t . t t t
tt t t t
ST, ~ leading tt t t
t
t
t : t
t t t t t t t
Relationship between desired signal vector and timing error-?+
+ c
Fig. 1
The effect of mismatch on the MOE algorithm has been investigated in [5-71. Since the adaptive filter v is no longer orthogonal to the exact desired signal vector, minimising the output energy will cancel the desired signal and the interference together. The continuous adaptation for the tap-weight vector will cancel the desired signal completely. The CMOE algorithm is one of the effective strategies for solving this problem. The constrained MOE solution is given by:
wc =
(R
+
v I ) - ~ G ~
(12)
where U, is the nominal desired signal vector and v is the Lagrange multiplier for the constraint on llwc112.
Recall that, when the step size is sufficiently small [12], the Griffiths' algorithm will make the resultant detector converge to GG = R-'U1, where U, is the nomi- nal desired signal vector. As long as the nominal desired signal vector is not orthogonal to the true one, the desired signal will not be cancelled completely. Consider two special cases: single-user case and very strong interference case. When only one user exists, the converged demodulator can be expressed by WG = (1/ $)(Ul - hl) where
A
= UlTu1/(($/A12)+Iu112). The con- tribution of the desired user to the demodulator output is thus expressed as A1WGTu1 = 2 A 1 , which is always positive and large as long as U l and u1 have highly pos- itive correlation. When the interference level is very strong, the tap-weight vector of the converged demodu- lator is asymptotically orthogonal to the space spanned by the interference vectors [3]. The desired signal will not be cancelled if and only if the desired signal vector does not lie in the interference space.The performance loss caused by the timing error in acquisition to the blind algorithms can be investigated by examining the signal-to-interference ratio (SIR). The IEE Proc-Commun.. Vol. 146, No. 1, February 1999
SIR is the ratio of the desired signal power to the power sum of noise and MA1 at the output of the filter
w.
That is,Considering the leading case, the SIR values for the MMSE demodulator and the converged detectors via the CMOE and Griffiths' algorithms are shown in Fig. 2 as a function of the timing offset. The simula- tion parameters are K = 8, NFR = 10dB and SNR = 20dB. Each user is modulated by a unique Gold code sequence with code length N = 15, which is generated from a pair of polynomials gl(x) = 1
+
x
+
x4 and g 2 ( x ) = 1+
x3+
x4. As indicated from the plots, the timing error causes a significant performance loss to these blind algorithms, especially in the presence of large timing error. Consequently, a blind algorithm for near- far resistant demodulation is required, that also can mitigate the effect of timing error.IO,
timing offset, T,
Effect of mismatch against timing error Fig.2
0-0 MMSE bound
0-0 Griffiths' algorithm
0-0 CMOE algorithm
A-A CMOE algorithm
*-% CMOE algorithm
4 Model-based Griffiths' algorithm
When the timing error is introduced, the desired signal vector can be expressed in the form of eqn. 10 or eqn. 11. Under the timing error the resultant MMSE demodulator is thus given by:
WO = A1 ((1 - h ) W N
+
61WR)W O= A1 ((1 - & ) W N
+
& W L )(14)
(15)
or:
where w R = R-'Td al, wL = R-'TL1al and wN = R-'al. Following the structure of the MMSE demodulator, we propose a model-based Griffiths' algorithm (MBGA) demodulator, as illustrated in Fig. 3. The MBGA demodulator adopts three adaptive FIR filters in paral- lel, which are implemented by the Griffiths' algorithm using TR1al, TL1al, and a l , respectively, as the nominal desired signal vectors. If the step-size is sufficiently small [12], the three adaptive FIR filters will converge to w R , w L and w N , respectively. Furthermore, if the tim- ing error
6,
can be estimated and whether the receiver clock leads or lags behind the timing of the desired user 31can be decided, the new algorithm can result in the demodulator by linearly combining
wR
and w N or WLand wN
Fig. 3
demodulator Block diagrurn of model-bused Griffiths’ adaptation algorithm
The timing error can be estimated recursively via the Godard algorithm, which minimises the cost function given by:
(16)
where zR(i>, z,&) and zLQ) are the output values of wR(j), w d ) and wL(j), respectively. Note that aR(j) and
aL(j)
are the gain factors corresponding to the leading and lagging cases, respectively. Whether the receiver clock leads or lags behind the timing of the desired user can be decided by comparing the accumulated decision errors during the adaptation process. Table 1 presents the summary of the new blind adaptive algorithm.In the following simulations the simulation parameters are N = 15, K = 8, NFR = lOdB and SNR = 20dB. The delay
rl
of the desired transmission is selected for different simulation cases, while the delays Zk, k = 2,...,
8, are chosen randomly in [0, Tb) and then kept fixed.
32
Table 2 shows the SIR values of the matched correla- tor, the MMSE demodulator and the inverse filtering demodulator [7] for different q . The inverse filtering demodulator w is designed to minimise the mean out- put energy subject to Cw = f, where C = [7‘,’a1 al TR1aIlT and
f
= [0 I 0IT. The cosine of the angle betweenuI
and u l , denoted by K, is used to indicate how close the nominal desired signal vector is to the exact one.Table 2: SIR of the matched correlator, the inverse filter- ing demodulator and the MMSE demodulator for differ- ent z,
0.0 1.0000 0.80 11.44 15.86 0.15 0.9854 -1.73 10.00 13.57 0.30 0.9170 -4.44 8.25 10.66 0.40 0.7512 -6.58 6.04 7.23
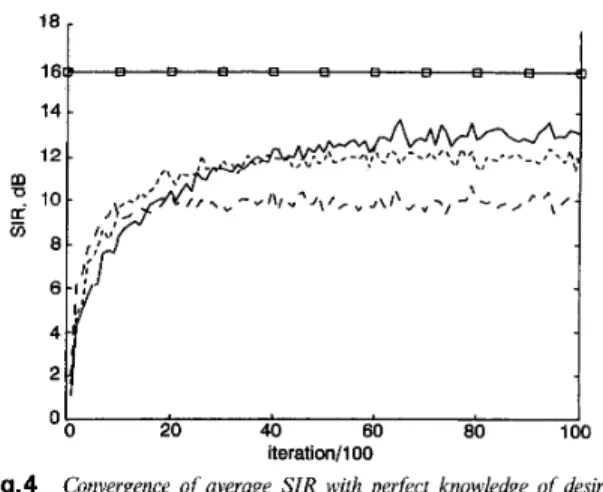
The first experiment demonstrates the trajectory of the averaged SIR values against time when the perfect knowledge of the desired signal vector is acquired (that is, z1 = 0.0). The averaged SIR at the jth iteration is calculated by:
where the subscript ‘r’ denotes the particular run and the number of runs is M = 500. The plots in Figs. 4
and 5 show that both the MOE and the Griffiths’ algo- rithms are expected to adapt the detector close to the MMSE solution under no mismatch.
I
o b 20 40 60 80 100
iteration/l 00 Fig.4
signal vector,for MOE algorithm
M MMSE bound
~ stepsize = 0.0008 ~~~~ stepsize = 0.0016
_ _ _ stepsize = 0.0032
Convergence of average SIR with perfect knowledge of desired
The second experiment demonstrates the convergence trajectory of the averaged SIR values against time under mismatch due to the imperfect timing synchroni- sation. The Lagrange multiplier used for the con- strained MOE algorithm is
v
= 0.1. The plots in Figs. 6-8 show that the MOE algorithm fails to imple- ment the demodulator in the presence of large timing error. The output SIR decreases to an unacceptabletive to the MMSE bound. The MBGA demodulator can provide the significant improvement in output SIR over all other adaptation algorithms. Due to the misad- justment in adaptive implementation, there is some per- formance loss in the MBGA demodulator compared to the MMSE bound. However, the SIR of the MBGA is always larger than that of the inverse filtering demodu- lator. The trajectory of the estimated timing offset is shown in Fig. 9. 8
-
“ -1 1 - --
0‘ I 0 20 40 60 80 100 iteration/100Convergence of average S I R with perfect knowledge of desired
Fig.5
signal vector for Griffiths ’ algorithm U 4 MMSE bound
~ stepsize = 0.0008
_ _ _ _ stepsize = 0.0016
_ _ _ stepsize = 0.0032
iterationsll00
Fig.8 Convergence of average S I R for dgerent blind algorithms in presence OJ mismatch for z, = 0.45Tc
0 4MMSE bound MGBA, __ constrained MOE _ _ _ Griffiths’ _ _ - - MOE
“t
I
ft’
Nj !
6 4 0 20 40 60 80 100 iteration/l 00Convergence of average SIR for dflerent blind algorithms in
Fig.6
presence of mismatch for Z,= 0.15Tc 0-0 MMSE bound MGBA __ constrained MOE _ _ _ Griffitbs’ MOE _ _ _ _ 1 2 d 10 I 20 40 60 80 100 iteration/lW Fig.7
presence of mismatch for z, = 0.30Tc -0 MMSE bound
_ _ _ MGBA,
__ constrained MOE
_ _ _ Griffiths’
Convergence of average S I R for dflerent blind algorithms in
MOE _ _ _ _
level after a large number of iterations. The CMOE and the Griffiths’ algorithms are robust against the effect of the mismatch in comparison with the MOE algorithm. However, their performance is worse rela- IEE Proc.-Commun., Vol. 146, No. 1, February 1999
I
20 40 60 80 100
-0.2 1 0
iterationdl 00
Trajectory of estimated riming offset by MBGA demodulator
Fig.9
~ timing offset = O.IST,
_ _ _ - timing offset = 0.30T‘
_ _ _ - timing offset = 0.4STc
6 Conclusion
In this paper, the performance of the MOE and the Griffiths’ algorithms was investigated and compared. The CMOE and the Griffiths’ algorithms are robust against the effect of mismatch in adaptation of the receiver, compared to the MOE algorithm. A new blind adaptive algorithm was proposed to mitigate the effect of mismatch caused by the timing error in synchronisa- tion. The new algorithm can provide a significant improvement in the output SIR over the Griffiths’ algorithm and modified MOE algorithms. The timing error is also estimated adaptively and the estimation can be used for further improving the accuracy in syn- chronisation.
7 Acknowledgment
This work is supported by the National Science Coun- cil of Republic of China under grant NSC-86-2221-E-
009-053.
8 References
1
2 3
ZIEMER, R.E., and PETERSON, R.L.: ‘Digital communications and spread spectrum systems’ (Macmillan, New York, 1985) PROAKIS, J.G.: ‘Digital communications’ (McGraw-Hill, New York, 1995, 3rd edn.)
MADHOW, U,, and HONIG, M.L.: ‘MMSE interference sup- pression for direct-sequence spread-spectrum CDMA’, IEEE
Trans. Commun., 1994, 42, (12), pp. 3178-3188
4 MILLER, S.L.: ‘An adaptive direct-sequence code-division multi- ple-access receiver for multiuser interference rejection’, ZEEE
Trans. Commun., 1995, 43, (2/3/4), pp. 1746-1755
HONIG, M.L., MADHOW, U,, and VERDU, S.: ‘Blind adap- tive interference suppression for near-far resistant CDMA’. Pro- ceedings of 1994 IEEE Globecom, Globecom’94, San Francisco, 6 HONIG, M.L., MADHOW, U,, and VERDU, S.: ‘Blind adap- tive inultiuser detection’, ZEEE Trans. In$ Theory, 1995, 41, (4), pp. 944960
5
CA, 1994, pp. 379-384
7 TSATSANIS, M.K.: ‘Inverse filtering criteria for CDMA sys- tems’, IEEE Trans. Signal Process., 1997, 45, (I), pp. 102- 112
8 ZECEVIC, N., and REED, J.H.: ‘Blind adaptation algorithms for direct-sequence spread spectrum CDMA single-user detec- tion’. Proceedings of 1997 IEEE Vehicular technology conference, VTC’97, Phoenix, AZ, USA, 1997, pp. 2133-2137
9 HWANC;, H.C., and WEI, C.H.: ‘Adaptive variable step-size Griffiths’ algorithm for blind demodulation of DS/CDMA sig- nals’, submitted to IEIEC Trans. Commun., 1998,
10 SMITH, R.F., and MILLER, S.L.: ‘Code timing estimation in a near-far environment for direct-sequence code-division multiple- access’. Proceedings of 1994 IEEE Military Comm., Milcom’94, Fort Monmouth, NJ, USA, 1994, pp. 47-51
11 STROM. E.G., PARKVALL, S., MILLER, S.L., and OTTER- STEN, B.E.: ‘Propagation delay estimation in asynchronous direct-sequence code-division multiple access systems’, IEEE Trans. Commun., 1996, 44, (l), pp. 84-93
12 GRIFFITHS, L.J.: ‘A simple adaptive algorithm for real-time processing in antenna arrays’, Proc IEEE, 1969, 57, (lo), pp. 1696-1704
13 TREICHLER, J.R., JOHNSON, C.R., and LARIMORE, Jr. M.G.: ‘Theory and design of adaptive filters’ (John Wiley & Sons, New York, 1987)
14 HAYKII‘J, S.: ‘Adaptive filter theory’ (Prentice-Hall, N.J., 1991, 2nd edn.)