MILCOM 2004 - 2004 IEEE Military Communications Conference
SPT-BASED POWER-EFFICIENT TOPOLOGY CONTROL FOR WIRELESS
AD
HOC NETWORKS
Szu-Chi Wang David S.
L. Wei
Sy-Yen KuoDepartment of Electrical and Department of Computer and and Department of Electrical
Engineering Information Sciences Engineering
National Taiwan University Fordham University National Taiwan University
Taipei, Taiwan Bronx, New York Taipei, Taiwan
ABSTRACT
This paper presents a localized Shortest-Path- Tree (SPT) based algorithm to cope with the topology conirol problem in wireless ad hoc networks. Each mobile node determines its own transmission power based o n b on its local information. The proposed algorithm first
power conservation has been widely used as a primary control parameter in the design of the protocols for wireless ad hoc networks. Therefore, the problem of power-efficient topology control has been attracting more and more researchers from the areas of wireless networking.
constructs local SPTsJFom the initial graph, and then the total power consumption is further reduced by allowing each mobile node to search and excise the replaceable links individually, The constructed topology ensures
network connectiviv, and possesses several desirable energy-eflcient features:
I)
its power stretch factor is bounded and can be predetermined, 2) the power consumption is evenly distributed among the mobile nodes, and 3) its total power consumption is lower than that obtained fiomthe
best known algorithms. Theperformance improvements of ihe proposed algorithm
are
demonstruled through extensive simulations.I. INTRODUCTION
An ad-hoc network is an infrastructureless wireless network proposed as an alternative to cellular networks for use in areas where the existing communication infrastructure does not exist (e.g. due to an earthquake or - flood)-or the construction of a fixed infrastructure is inconvenient or impossible (e.g. on a battlefield or in space). In such
a network, each node is responsible for
serving not only as a user but also as a router. A wireless link between any two nodes can be established if the radio transmission range of each node can cover each other. In case of insufficient radio transmission range between the two nodes, multiple "hops" may be required, whereby intermediate nodes re-broadcast the messages until the destination node is reached. The reliance on wireless multi-hop communications to maintain connectivity among nodes adds new complexity on the design and operation of the network. The lack of a physical backbone infrastructure poses a strong need of topology control of the network. It has been shown that the performance of a protocol for an ad-hoc network canbe enhanced if the protocol is designed based on
overlaying a virtual infiastmcture on the ad-hoc network. Also, due to the finite power supply of a mobile node,
In this paper, we propose an algorithm for constructing energy-efricient topology for wireless ad hoc networks. A wireless ad hoc network can be modeled by a weighted directed graph
G
= (V, E ) , where V represents the set of all mobile nodes andE
represents the set of interconnections between mobile nodes. For each edge (U,v) E E, node v must be in the transmission range of node
U. We use lluvll to denote the Euclidean distance between
node U and node v . The weight of the edge ( U , v ) , denoted by w (U, v), can be formulated as t.lltavlla f rp(q v ) in the most widely-used power-attenuation model, where t is a
threshold related
to
thesignal-to-noise ratio at node
U, and a is a constant between 2 and 5 depending on the wireless transmission environment. The former part of the equation is typically called transmitter power and is the power consumed for transmitting signal from node u to node v. The remaining part is the power consumed at the receiver and is called receiver power. We assume that all receivers have the same power threshold for signal detection, and the value of t is thus an appropriateconstant. The sum of transmitter power and receiver
power is called transmission power in the rest of this paper. Throughout the paper, we use the terms link and edge interchangeably.
We assume that all the mobile nodes are distributed in a two-dimensional plane and each mobile node has a GPS receiver on board for acquiring its own location information. To begin with, all mobile nodes are operated at full transmission power and have the transmission radius equal to one unit by a proper scaling. Consequently, the resulting graph
G
can be modeled as a unit-disc graph (denoted as UDG (V)) and there is an edge between two nodes if and only if their Euclidean distance is at mostone.
We assume that UDG (V) is strongly connected, All of the mobile nodes have unique identifiers(ID)
numbered from 1 to N, where N =IVl.
Each mobile node can individually adjust its own transmission power, We also assume that omni-directional antennas are used by all of the mobile nodes to transmit and receive signals. Wireless ad hoc networks are power constrained, and it is thus undesirable to ask each mobile node to always transmit with maximum power. Otherwise, the total power consumption will often be unnecessarily high and the transmission interference will occur more frequently. In fact, it has been shown that mobile nodes expend most of
their power in communications [l]. As a result, each mobile node should adjust its transmission power to reduce its power consumption while still maintain network connectivity. Due to the inf’rastructureless nature of the ad hoc networks, to avoid flooding the network, it is preferred that the network topology can be constructed in a EocaZized manner. Stojmenovic et al. first give the definition of a localized algorithm [2]. A distributed power control algorithm is called localized if each node can decide its transmission power based only on the information of the nodes reachable in a small constant number of hops.
Hereafter we adopt several definitions given in [3]. Letf
be a complete transmission power assignment on V, and
Gf
be the associated communication graph. Clearly, Gf g G. The total power consumption off(denoted by tpcv))is defined as Au), where Au) is the minimum transmission power needed to reach all the neighbors of
U in GJ. Given a path
n(u,
v) from node U to node v inG>
it can be expressed as
n(u,
v) = V O Y I . . .Y ~ - I V ~ , where U = VO, v = vh. The path length of n ( u , v) (denoted byIn(u,
v){) is h. The transmission power of this path is defined asi=l
Given a communication graph
H,
the minimum-energypath between node U and node v, denoted by
nHmin(u,
v),is a path whose total power consumption is the minimum among all the paths that connect these two nodes in
H.
Let p d u , v ) stand for p(nHm(u, v)). The power stretch factor of the graph Gfwith respect to G is then defined asThe two most widely used energy conservation approaches in the literature are: (1) reducing the transmission power of each node; and (2) reducing the total power consumed by all nodes involved in one communication session. The latter can be achieved by preserving the minimum-energy paths of the given UDG
(V). However, these
two
approaches may offset each other, and a discussion of it canbe
found in [4]. Themajor concern of our work is to develop a localized topology control algorithm where each mobile node makes a decision about its transmission power based only on its local information. These locally made decisions collectively ensure global network connectivity and the network topology controIled by the transmission power of each mobile node must be energy-efficient. More precisely, the proposed algorithm should achieve the following objectives: (1) a complete transmission power assignment with low total power consumption; (2) a constant bounded power stretch factor.
The rest of this paper is organized as follows. Section I1 briefly introduces the related works, Section III describes
the ideas and properties of our algorithm. In Section
IV,
the superiority of our algorithm is demonstrated via simulations by comparing the energy-efficiency of the
constructed topologies of ours with others in terms of
several important metrics. We also propose an efficient way to deal with the node mobility in Section V. Finally conclusions are drawn in Section VI.
11. RELATED WORKS
In [SI Rodoplu and Meng described a distributed protocol for constructing a topology that guarantees preserving the minimum-energy path between every pair
of nodes that are connected in the original graph G. The
concept of veZuy region is first introduced in their paper. Recently, Li and Halpem [ 6 ] proposed a protocol based on results in [ 5 ] but performs better and is computationally simpler. In [7] Li
and
Wan proposed a distributed position-based protocol to construct an enclosuregraph
for conserving power inone
communication session. Their protocol is more efficient in time and space than [ 5 ] . All of these works focus on constructing a subgraph of G that includes the union ofall of the minimum-energy paths. Also, the problem of finding a complete transmission power assignment using some optimization criteria has been studied in (8, 9, 10,
171. However, the proposed approaches of transmission power assignment with objective of minimizing the total power consumption in [9, 10, 171 are all centralized and cannot be transformed to localized algorithms. The trade-off between sparseness and energy efficiency of the topology has been discussed in [3]. In [3] Li et al. studied the energy efficiency property of several well-known proximity graphs, such as the constrained Gabriel graph (denoted by GG (G)), the constrained relative neighborhood graph (denoted by RNG
(c)),
andthe constrained Yao graph (denoted by YGk (G‘)), over a (directed) graph G. They showed that the total power consumption of these geometric structures could be arbitrarily larger than the minimum total power needed to maintain the strong connectivity of the network.
Moreover, most of their works (e.g. [3, 113) assumed that receiver power is zero, which is not practical according to [ 121.
each link is attached a tug to describe its attribute in LL (U). Initially LL ( U ) contains all the edges of node U in UDG (V) and each link is tagged as regular. Then, we try Also, in the literature, the concept of visible
neighborhood, namely the topology view of each node based on its local information, has been introduced (see, e.g. [13, 14, 161). Ning Li et al. 1131 developed a topology control algorithm in which each node builds its local minimum spanning tree using the one-hop neighborhood information. The network topology derived by their algorithm has the following properties:
( I )
network connectivity is preserved, (2) node degree is bounded, and (3) all uni-directional links can be removed. It has been validated by simulations that their algorithm has advantages over[SI
and [IS]in
terms ofsome
metrics. In [16], Li proposed a localized algorithm to construct a subgraph of G whose total edge length is bounded by a constant multiplying by that of the minimum spanning tree. Unfortunately, it has been shown that the total power consumption of the constructed subgraph can be 0(IU?
larger than the optimal. Each algorithm in [13], [18] and [I61 cannot guarantee a constant bounded power stretch factor. The property of the (constant) bounded power stretch factor is desired for the applications sensitive to worst-case behavior of the topology control.111. OUR TOPOLOGY CONTROL ALGORITHM
A.
Observations
For simplicity, like those previous works, we first
assume that each node in the network is stationary. We then adapt our algorithm to the mobile environments in
Section V. Considering a complete transmission power assignment
f,
there is a tradeoff between tpcv) andpsfGJ
(G) ,
i.e., over reducing the transmission power of each individual node may diminish minimum-energy paths or vice versa. The problem of finding a complete transmission power assignment f whose total power consumption is the minimum among all of the complete transmission power assignments is usually called themin-total
assignment
problem. A similar problem is to find a solution that contains bi-directional links only. However, to the best of our knowledge, no localized algorithm for the above two problem has been given. Moreover, both problems are NP-Hard [8, 9, 171 and it is still an open question for the best approximation ratio in either case.Therefore, our algorithm is designed heuristically as follows. First, we construct an edge subgraph G ’ from G; G’ has a power stretch factor of one. The logical link set
of node U in G’ is denoted as LL ( U ) . We assume that
~~
to minimize the total power consumption as much as possible. The basic idea is to let each node excise some logical links of the subgraph while still keeps the power stretch factor being bounded by a constant cb. Unlike the algorithms proposed in [3], we do not aim to construct a topology that guarantees a constant bounded node degree (though our algorithm may generate such one) in this paper. The main reason is that, as shown in [3], a geometry structure with a constant bounded node degree may contain very limited minimum-energy paths between any two nodes. Our design goal is to preserve as many of these minimum-energy paths as possible. Moreover, as mentioned in [4], further eliminating edges may result in more congestion and hence worsen network throughput and fault tolerance in the long
run.
For each node U , since no global knowledge of the
network topology is available, each operation can only use the information from the nodes in its vicinity. Our solution is to let U construct a Iocal topology view LTY ( U , k) based on the location and logical link information
of the nodes within its k-hop neighborhood
The information about the one-hop neighbors can be obtained by using some form of beacon messages that are sent periodically and asynchronously by each node to declare its presence. To obtain the information of
hvo-hop neighbors, a common solution is that each node
attaches its own one-hop neighborhood information while sending the beacon messages. These two kinds of information have been extensively used to facilitate message routing and broadcasting in wireless ad hoc networks, and therefore, the cost of maintaining such information can be amortized. Similar idea can be generalized to gather k-hop,
k
> 2, neighborhood information. Note that in practice’ k shouId be small compared to network diameter D. The definition of LTV (U, k) is given as follows.DeBnition I (Local Toporogy fiew): The local topology view of node U , denoted by LTV (U, k) = (V’, E?, is a
subgraph of G such that (1) a node vi E V’ if the hop
distance between vi and U is no more than k; (2) an edge
(vi, vj) E
E’
if (vi, vi) ELL
(vi) and both vi and vj belongto
Y’.
The tag of each edge in E’ is also recorded.Suppose that a subgraph of G is associated with a transmission power assignment J For each node U , if a
logical link (U, U) satisfies the equation w ( U , v) =
f
(U),then (U, v ) is called a critical Zink of node U. Assume that
all critical links of U are excised. If LL ( U ) # 0, we define
ps(u) as
Mu)
-
f ’ ( u ) ) / a(u), where f ’ ( u ) is the transmission power needed to maintain the remaininglogical link(s) of node U, and .(U) is the number of
critical link(s) of node U ; otherwise, ps(u) = 0. The
priority of node U is a pair pri(u) = <ps(u), ID(u)>. Let pri(v1) = (ps(vl), I D I ) a n d p r (v2) = (PS(v2),
ID*).
Then,pri(v1) > pri(vz) if ps(v,) > p ~ ( v 2 ) , or ps(v1) = ps(v2) and ID1
ID&
B.
Two-Phase Localized AlgorithmThe proposed algorithm is composed of two phases, namely local shortest tree construction and path
seurch
replacement, These two phases are loosely coupled, i.e., the techniques introduced in each phase can be individually used in the design of any other topology control algorithm with proper modifications.Phase
I,,
Local Shortest Tree Construction: Theinformation needed in this phase by each node is the IDS and the locations of its one-hop neighbors, which can be easily gathered since we assume that initially each node sends a beacon message with its maximum transmission power. More precisely, such information is included in LTY (U, l), and the weight of each edge can thus be
derived, Note that the edge weight includes both transmitter power and receiver power between the two end nodes of the edge. Each node U applies Dijkstra's
algorithm independently to get the shortest-paths from the
source
node U to the other nodes in LTV (U, 1). As aresult, the Iocal shortest path tree of node U , denoted by LSPT (U), can be obtained. The direct children of node U,
DC
(U), is defined asDC
(U) = {v E V'I
h (LSPT ( U ) , v ) = l ) , where h (LSPT (U), U) is the height of a child nodev in LSPT (U). Node II then removes the logical link set
((U,
w)
I
w
e
DC
(U))from LL
(U).The topology
generated under the above descriptions is denoted asG'.
Sincefor
each node U, only the one-hop neighborhood information is available for constructing LSPT ( U ) , somelinks in' GI may be uni-directional. However, uni-directional links are unfavorable in wireless ad hoc networks. In [13, 151 it has been shown that network topologies free of mi-directional links are much more beneficial to MAC layer control mechanisms, link-Ievel acknowledgments and package transmissionsire- transmissions. Our solution to remove mi-directional links is simple: since
at
the end of phase I, all nodes are aware of the logical links of its one-hop neighbors, each node deletes its uni-directional links. The resulting topology is denoted as G". We will prove that G" not only preserves network connectivity but also preserves all minimum-energy paths of G in Section n1.D.Phase I], Path search replacement: At the beginning of
this phase, each node is assumed to perceive the logical link(s) of its one-hop neighbors. As a result, for each node U, LTV ( U , k) can be acquired by sending k-1 more
beacon messages. Node U then can further reduce its
transmission power by trying to eliminate the critical link(s) that are replaceable with alternative paths. That is, for each critical link ( U , v), node U tries to search another
path that reaches node v based on LTV (U,
k).
We callsuch path the replacing path
o f
(U, v). The entire replacing path(s) of node U is denoted asRP
( U ) .Whenever a node U fmds that it has the highest priority
within its k-hop neighborhood and p s (U) > 0, it starts a
search for RP (U). The searching process is also based on Dijkstra's algorithm. After obtaining LTV ( U , k), node U
applies Dijkstra's algorithm on it to search for the shortest path I&-,,,,,,(tl, v). Note that all of the original
critical links of each node should be excluded during the searching process, which can be achieved by setting their edge weights to 00 temporally. Assume that the weights
of all shortest paths originated from U are stored in an array dist
[NJ
ordered by theIDS
of the destination nodes. Note that if a node v is unreachable from U in LTV (U,k),
then dist
[ID
(v)] = m. Node U saves the result by anID
list including all of the intermediate nodes of lIksmin(u, v). Let cb be a predetermined constant. I f no such path exists o r p ( l - I k m m i n ( ~ , v)) is more than cb times larger than
the weight of edge ( U , v), then the search process is
ended,
RP
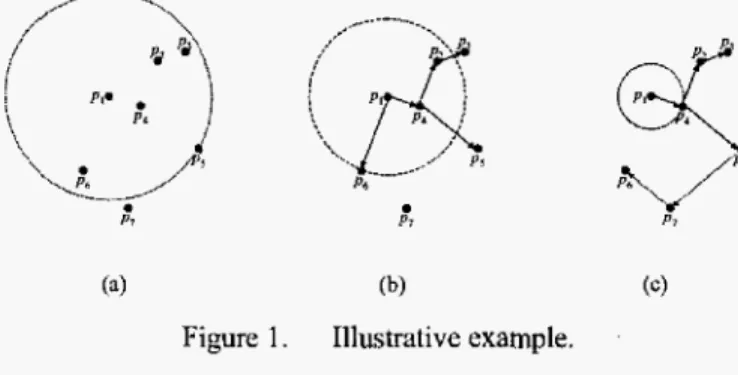
( U ) is set as an empty list, andps(u) is set to 0.Otherwise, IIk-mm(~, v) is the eligible replacing path of (U, v), and (U, v) can be excised. An example is illustrated in
Fig. 1. The gray line in Fig. l(a) is the transmission range of p r with full transmission power. AAer Phase I, the area covered by the dashed line in Fig. l(b) is the new transmission range ofpl, which is decided by LSPT @ I ) . After Phase 11, ifp, found an alternative path IT@,,
w@l, p6), then p1 can excise ( p r , pd). This way, the transmission range (and thus the transmission power) of
pl can be largely reduced, as shown in Fig. l(c).
If all critical link(s) of U can be excised, ps(u) is set to 0
and f ' ( u ) becomes the minimum operational power needed to cover the remaining logical link(s). That is, each node executes the search process at most once in Phase 11. Node U then disseminates its replacing path(s)
to its k-hop neighborhood by a notification message. The notification message is a tuple nm =
<id,
LL, Rp> that records theID,
logical links and replacing path(s) of the sender node, respectively. Each constituent link in the replacing path(s) is called as a replacing link. For each node U, ifit
is notified that its link (U, v)is
a replacing
link, the tug of ( U , U) is switched to replacing. For each
node w with ps(w) > 0, if w receives a notification message, it first checks if any of its critical link(s) is tagged as replacing. If so, w sets ps(w) to 0 and disseminates its new priority to its
k-hop neighborhood.
Otherwise, w updates LTV (w,k)
according to nm. I f wfound that its priority is the local maximum within its k-hop neighborhood, it starts to search the replacing path(s) of its critical link(s) following the above steps. Finally, after Phase 11, the transmission range of each node U can be decided to be the power level it needs to
reach its remaining logical links in the constructed topology. The constructed topology after Phase I1 is denoted as G"'.
/---+--\
__-.----._a
P, PI
x
(4 (b) (c)
Figure 1. Illustrative example.
C.
Heuristics to Improve the PerformanceIt's not hard to see that there is a tradeoff while searching for the relaying path(s), e.g. if some critical links of the nodes with lower priorities are chosen for composing the replacing paths of the nodes with higher priorities, the transmission power of those low-priority nodes cannot be reduced. However, if node U excludes all the critical
links in LTV ( U , k) while applying Dijkstra's algorithm,
the possibility of failing to find an eligible repiacing path will increase. We use a simple heuristic to firther decrease the total power consumption: for each link (vi, v,) in LTV (U,
k),
if ps(vi) = 0 or (vi, vj) is not a critical link of node vj, then we modify the weight of (vi, vi) by multiplying it by a dilution factor dfiv,), which is defined as 1+
@(vi) / &U)) before applying Dijkstra'salgorithm. If not all of the eligible replacing path(s) can be found, Dijkstra's algorithm is applied again on the original L W ( u , k). The remaining steps are the same as above. We
can
also extend cb to be a real number, e.g. 1.5, instead of using an integer constant such that more flexibility can be introduced while Phase 11 is applied. In fact, the experiment results proved that using 1 < cb < 2 can M h e r improve the power stretch factor at the cost of only a slight increase in total power consumption.D.
Properties of the Constructed TopologyWe prove some critical properties of the topology generated by our algorithm below. For clarification, we use wG(u, v ) to denote the weight of edge (U, v ) in G.
Lemma I : The minimum-energy path between any two nodes in G is preserved in GI.
Proof: For every node pair U and v , if (U, V ) E E and is
deleted after the construction of LSPT ( U ) , 3 a path
n(u,
v) in the initial LTY ( U , 1) such thatp(n(u, v)) < wG(u, v), Assume a deleted link ( U , v) exists in the
minimum-energy path
n,,,
of G. Since L W (U, 1) is a subset of G, I3(U, v ) should be included in G. If wereplace (U, v) with
I
I
in U,, then the transmission powerof the new path will be smaller than
II,,,,
and acontradiction is derived.
Lemma 2: The minimum-energy path between the two end nodes of each deleted link in
G'
is preserved in G".Pro08 We sort all the links that are deleted in the
uni-directional link removal procedure by the following rank formula: (ul,
v l )
> (uZ, v2) if wG(uI, vi) > wG(u2, v2),or wG(ul, V I ) = wG(u2, vz) and ID(u1) > ID(ul), or wG(uI,
v i ) = wG(u2, v2) and ID(ul) = ID(u2) and ID(vl) ID(v2). Since the order of link deletion does not change the resulting subgraph, without loss of generality, we assume that the links are deIeted according to their ranks in an ascending order. We prove by induction that GI1 preserves the minimum-energy path of each deleted link.
Basis: k = 1, Consider the first deleted link (U', v'),
clearly for node V I there is a path
n(v',
U') in LSPT (v')such that p(ll(vl, U')) < wG(vl, U ' ) . According to our
energy model wG(v', U') = wG(u', V I ) , and each link (uh, vh) that comprise II(v', U') must satisfy wc(uh, v? < y G ( u ' , V I ) . Therefore, each link that belongs to
n(v',
U ) is bi-directional and is preserved in G".
Induction: Assume Lemma 2 holds for all deleted
links (ui, vi)
I
i = 1, 2,...,
k-1. Now we prove thatLemma
2 also holds for edge
(d,
6.
Consider link (uk7 v?, clearly for nodefl
there is a path II(v', uk) in LSPT(U? that p(II(vk, U?) < wG(uk, v?. Similarly, each edge (U', vh) that comprise
II(vk,
u s must satisfy w'(u', v?< wG(uk, v?, and there are two cases:
Case I : (uh, vh) is bi-directional, as a result, (U', v') is
not deleted.
Case 2:
(d',
4)
is uni-directional, since wG(uh, v? <wC(uk, v?, the minimum-energy path between (uh, v?
is reserved, namely, there is a path n ( u h , )v' that is composed of bi-directional links and has the minimum total power consumption. It implies that the deletion
of (uk,
4
does not affect the minimum-energy path between node uk and node vk. 0'
Lemma 3: G" preserves the network connectivity of G.
Puoo$ Follows directly from Lemma 1 and Lemma 2, since the minimum-energy path between any two nodes is preserved in G". 0
Lemma 4: psfG,,[ (G) is bounded by cb.
Clearly, the power stretch factor of GI' is one. Consider each constituent link ( U , v ) of the minimum
-energy path, (U, v) can only be substituted by a replacing Proof
path
n(u,
v ) such thatp(H(u, v)) 5 cbwC(u, v). Since the end nodes of each replacing link is in the k-hop neighborhood of node U and will not begin their searchprocess until U fmishes its Phase 11. Moreover, each
repIacing link of U is marked by a replacing tag and will
not be excised in the future. As a result, the power stretch factor of G'" is at most cb times larger than G". 0
Theorem I : G"' preserves the network connectivity of G and has a constant bounded power stretch factor cb.
PruoJ Follows directly from Lemmas 1, 2, 3, and 4. 0
rv.
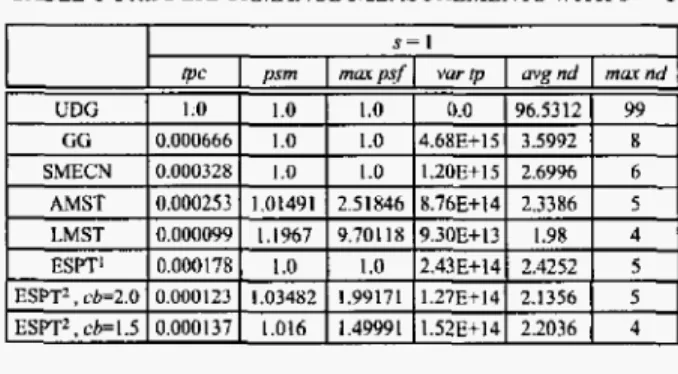
PERFORMANCE COMPARISONSVia simulations, we compared the performance of our algorithms with that of others in terms of total power consumption, power stretch factor, and the node degree of the constructed topologies. The experimental results are summarized in Table I - Table IV. Our algorithm is denoted as ESPT. For the sake of study, the fust phase
alone of our algorithm is denoted as ESPT', and the one that consists of both Phase I and Phase I1 is denoted as
ESPT2. The unit disk graph (denoted as UDG) is chosen
as a basis for comparison. We chose the algorithm proposed by Li and Halpem [ 6 ] (denoted by SMECN) since it performs significantly better than the one proposed by Rodoplu et al. [5] in terms of total power
consumption, and has a power stretch factor of one. Likewise, the constrained Gabriel graph (denoted by GG) outperforms those described in [3] in terms of both total power consumption and power stretch factor. It is thus chosen for comparison here. The algorithm proposed by
Li [16] (denoted as AMST) is based on the constrained relative
neighborhood
graph. However,Li's
paper offers only theoretical analysis without the experimental performance, and is of interest to us. The MST-based topology control algorithm proposed in [13] (denoted asLMST) is also chosen to compare because its total power
consumption is lower than that of SMECN (though its power stretch factor is larger). Our algorithm operated with a 5 4, k = 2, and cb = 1.5 and 2.0, respectively. So
as to have fair comparison, in SMECN each node was assumed to broadcast its neighbor discovery message (NDM) with the maximum operational power while
1 . psm is a modification of power stretch factor since most of the above topologies clearly have a power stretch factor bounded by a very small constant. This metric is more suitable to further evaluate the energy conservation for a communication session.
2. m m psf shapes the worst-case behavior of applications that operate over the constructed topology.
3. Due to the uniform power threshold in our model, we set 1 = 1 when counting transmission power for convenience.
gathering necessary local information. As for LMST, to balance the trade-off between tpc andpsm, we did not
incorporate the removal of mi-directional links.
We observe the following metrics of each constructed
topology
H:
(1) total power consumption associated withN
(denoted by tpc), (2) power stretch mean (denoted by psm), which is defined as psm = ( P H ( N . V ) ) , N Z ,1 (3)u,vsy P G ('3')
the maximum power stretch factor (denoted by WLW psd
observed throughout the experiment: (4) the variance of transmission power (denoted by var @I),~ (5) average node degree (denoted by avg mi), and (6) the maximum node degree observed throughout the experiment (denoted by m a nd). The last two metrics are chosen mainly for a better understanding of topology characteristics. The values of tpc, psm, var rp and avg nd are the average of 50 independent experimental results.
Be advised that tpc is normalized to lie in between 0.0 and 1.0 by dividing its values by the total power consumption of UDG The transmitter range
R is
fixed at 500 meters. The map sizes are equal to s x R by s xR,
for s = 1, 3, 5, 7; s directly relates to network density. The x and y coordinates of each node are selected atrandom in the interval [0, m], where m is the map size. The experiment was performed for N = 100.
From Table I - IV we observe that the topology constructed by our algorithm (ESPT'ESPT') has a tpc
much less than that of GG
and
SMECN in all cases, and the increase in the psm of ESPT' is almost negligibre, say less than 0.04. This means that the total power consumption can be decreased significantly while preserving most of the minimum-energy paths. As for thecomparison with LMST, first we consider denser
networks (see Table I - 11). The tpc values of our algorithm are slightly more than those of LMST. However, since the differences are relatively very small with respect to
UDG
we believe that our algorithm has advantages while considering other energy-efficiency metrics, such as psm and m a p s f , Note that since LMST does not take the power stretch factor into consideration, the subgraph generated by LMST might have very large mar psf (about 9 in this case), while our algorithm guarantees a bounded marpsf (1.5 and 2.0 in this case). For sparser networks (see Table 111-
IV), ESPT' can outperform LMST in both tpc and p ~ m . Albeit the marpsf of LMST is decreasing when s is increasing in our experiments, LMST does not provide a theoretical upper bound on the
m a
psf. Both ESPT' and ESPT2 have smaller tpc compared toA M S T
in all cases. Note that although the topology constructed by AMST tends tohave a small psm (but still larger than that of ours), its power stretch factor cm be as large as N-1 [16]. Clearly,
if the receiver power is a non-zero constant, the power stretch factor of LMST and AMST becomes even larger. Finally, it can also be observed that our algorithm performs well in var tp, especially in the case ~ ~ E S P T ’ with s > 1. Since, overall, our algorithm has edge on others in both summation and variance of transmission power, our algorithm can provide a better opportunity of avoiding node power depletion. The above experimental results also indicate that, if the source and destination nodes are randomly chosen, our algorithm effectively curtails both total power consumption and the variance of transmission power. In addition, with its small psm
and constrained max pJ we believe that the topology constructed by our algorithm can provide a base for power efficient communication operations, and thus can
prolong the node and network lifetime.
UDG GG
V.
DEALING
WITH MoBrLITYThe above discussions are all performed under ‘the assumption that every node is static. While taking node mobility into consideration, each node must be able to adjust its transmission power dynamically. An intuitive idea to achieve network reconfiguration is that all of the mobile nodes send beacon messages with full transmission power and
run
the proposed algorithm periodically. In this paper, we consider the case ofmodest movement of the nodes. With high mobility, basically a smaller k should be adopted in Phase I1 and the interval to send beacon messages should be very
pc psm marp$f v u r p uvgnd m a r e d
1.0 1.0 1.0 0.0 96.5312 99
0.000666 1.0 1.0 4.68E+15 3.5992 8
short. In fact, it will be extremely difficult for a topology control algorithm to even effectively guarantee network connectivity if the topology changes too fast.
On the other hand, the above-suggested idea may be too
costly in case of low mobility, As mentioned in previous works (e.g. [7]j, node movement can be viewed as two events, namely node addition and node deletion. Therefore, what we should solve turns out to be finding an efficient way to add a new node to and remove a node from the network. We assume that a moving node, say node v, broadcasts a node deletion notification before its movement and broadcasts its new position information to notify node addition at the end of each beacon interval, both with full transmission power. For node addition, if node U received the new node information from node v,
it re-decides LSPT (uj and checks if (U, vj is a logical
link of this new LSPT ( U ) . If yes, node U re-executes the
search process and updates its logical Iink(s); node U informs node v to add link (v, U ) if necessary. For node
deletion, consideration should be taken only if (U, v) is a logical link of node U. In this case, node U re-decides LSPT ( U ) and re-executes the search process; node U also
checks if ( U , v j is also a replacing link of some node; if
node U is aware of that the movement of node v will
break the repIacing path of some node w, then node U
informs node w to re-execute the search process and disseminates its new replacing path if there is one. It is not hard to see that node v only affects the logical link(s) of the nodes within its k-hop neighborhood.
UDG
TABLE I THE PERFORMANCE MEASUREMENTS WITH s = 1 TABLE 111 THE PERFORMANCE MEASUREMENTS WITH 3 = 5
s = I
I
s = 5r = 7
Ipc
I
psm1
muxpxfl vartpI
w g n dI
m a r n d1.0
I
1.0I
1.0I
0.0I
5.6392I
14SMECN 10.0003281 1.0
I
1.0 11.2OEt15I 2.6996I
6AMST 10.0002531 l.Ol491 12.51846 18.76E+141 2.3386
I
5LMST o.000099 1.1967 9.70118 9.30~+13 1.98 4 ESPTl 0.000178 1.0 1.0 2.438+14 2.4252 5 E S W , cb=2.0 0.000123 1.03482 1.99171 1.27E+14 2.1356 5 ESFT2,cb=1.5 0.000137 1.016 1.49991 1.52Ef14 2.2036 4 ESFT2,cb=2.010.000123 I 1.03482
I
1.99171 11.27E+l41 2.13561
ESFT2,cb=1.510.W01371 1.016 11.49991 11.52Ef141 2.20361
5 4TABLE I1 THE PERFORMANCE MEASUREMENTS WITH s = 3
I
I
s = 3I
LMSTI
0.10403I
1.03698 14.38495 19.96Et19I 2.1351
4 ESPT’ 10.12~6291 1.0I
1.0 11.08~t201 2.45I
5 ESPT2,cb=2.0 10.0862271 1.03671I
1.997t 16.S1E+19[ 2.1564I
ESPT*.cb=1.5 I 0.09287 1 1.01372 I 1.49999 \6.87E+191 2.2236 1 5 5TABLE IV THE PERFORMANCE MEASUREMENTS WITH s = 7
GG 10.3808771 1.0
I
1.0 ]3.46Et201 2.9548I
8Through our simulations, we observed that, in most
cases,
the average number of nodes affected by removingof
a relaying linkis
close to one, that is, the links that comprisedthe
replacing paths were sporadic and evenly distributed, Thus, at the beginning of each beacon interval, node U checks if there is a change in transmission radiusafter deciding the new logical links. If yes, node U updates
its critical link(s). If node U found that its ps value
becomes larger than 0, then it disseminates its new priority
and re-executes the search process. No recalculation is needed for node U if there is no node addition in its
one-hop neighborhood and no node deletion in its replacing path. The communications and computations of the reconfiguration process can thus be performed locally, which is preferred for wireless ad hoc networks.
VI. CONCLUDING REMARKS
In this paper, we show how to construct and maintain an energy-efficient topology in wireless ad hoc networks in a distributed and localized manner. Our algorithm requires only local information for constructing and maintaining a topology on the given unit disk graph. The concept of k-redundant edges has been proposed by Li and Halpern
[ 6 ] . However, the algorithm in [6] deals with 2-redundant
edges only, The contributions of our algorithm are multi-fold. First, the approaches in Phase I figure out k-redundant edges for
k
2 2. That is, we can get a minimum-power topology with less total powerconsumption by a new approach that is totally different
from those given in [5, 61. Our algorithm is also simpler in computation than theirs. Second, the topology constructed after Phase II has several desirable features such as bounded power stretch factor, low total power consumption and smaIl variance of transmission power.
The simulation results show that our algorithm outperfoms others in terms of various important metrics. Third, our algorithm provides the flexibility of predetermining the power stretch factor of the derived subgraph. In summary, the proposed algorithm effectively and efficiently constructs a virtuaI backbone that can
support
energy-aware communication applicationsover
wireless ad hoc networks.
REFERENCES
[ I ] L. M. Feeney, M. Nilsson, “Investigating the Energy Consumption
of a Wireless Network Interface in an Ad Hoc Networking Environment,” IEEE INFOCOM2001, pp. 1548-1557,2001.
[2] I. Stojmenovic and X. Lin, “Power-aware Localized Routing in Wireless Networks,” IEEE International Parallef and Distributed Processing Symposium, 2000.
[3] X.-Y. Li, P.-J. Wan, Y. Wang, and 0. Frieder, “Sparse Power
Efficient Topology for Wireless Networks,” HZCSS, Hawaii, January 2002.
[4] R. Wattenhofer, L. Li, P. Bahl, and Y. M. Wang, “Distributed Topology Control for Power Efficient Operation in Multihop Wireless Ad Hoc Networks,” IEEE INFOCOM 2001, pp,
1388-1397, April 2001.
151 V. Rodoplu and T. H. Meng, “Minimum Energy Mobile Wireless Networks,” IEEE Journals an Selected Areas in Communications,
[6j E. Li and J. Nalpem, “Minimum Energy Mobile Wireless Networks Revised,” IEEE International Conference on
Communications (ICC 2004, June 200 1 .
[7] X.-Y. Li and P.-J. Wan, “Constructing Minimum Energy Mobile Wireless Networks,” ACM Symposium on Mobile Ad Hoc
Networking ond Computing (MobiHoc), Long Beach, California, October 2001,
[8] A. E. F. Clementi, P. Penna, and R. Silvestri, “On the Power Assignment Problem in Radio Networks,” Elecrrunic Culloquium
on Computational Complexiv (ECCC), 2000.
[9] L. Kirousis, E. Kranakis, D, krizanc, and A. Pelc, “Power Consumption in Packet Radio Networks,” Symposium an Theoretical Aspects of Computer Science (STACS), 1997.
[IOJG. Calinescu, I. Mandoiu, and A. Zelikovsky, “Symmetric Connectivity with Minimum Power Consumption in Radio Networks,” IFIP-TCS, 2002.
[ 111 X.-Y. Li, P.-J. Wan, W. Yu, “Power Efficient and Sparse Spanner for Wireless Ad Hoc Networks,” IEEE International Conference on Computer Communications and Networks (ICCCNOI), Scottsdale, Arizona, October 200 I ,
[12]J. A. S h e , G. de Veciana, “A Comprehensive Energy
Conservation Solution for Mobile Ad Hoc Networks,” IEEE International Conference on Communications (ICC 2002), New
York, April 2002.
[13]N. Li, J. Hou, and L. Sha, “Design and Analysis of an MST-Based
Distributed Topology Control Algorithm,” ZEEE ZNFOCOM 2003, June 2003.
[14]S. C. Wang, D. S. L. Wei, S. Y. Kuo, “A Topology Control
Algorithm for Constructing Power Efficient Wireless Ad Hoc Networks,” IEEE GLOBECOM 2003, December 2003.
[15] S. Narayanaswamy, V. Kawadia. R. S. Sreenivas, and P. R. Kumar, “Power Control in Ad-Hoc Networks: Theory, Architecture, Algorithm and Implcmentation of the COMPOW Protocol,” Proc. of European Wireless2002, Next Generation Wireless Networks: Technologies, Protocols, Services and Applications, pp. 156462, Florence, Italy, Febmary 2002.
[16]X.-Y. Li, “Approximate MST for UDG Locally,” 7’he Ninth International Computing and Combinatorics Conference
(COCOON2#03), July 25-28,2003, Big Sky, MT, USA.
[17]X. Cheng, B. Narahan, R. Simha, M. X. Cheng, and D. Liu, “Strong Minimum Energy Topology in Wireless Sensor Networks: NP-Completeness and Heuristics,” IEEE Trunsncfions on Mobile Computing, 2(3):248-256, July-September 2003.
[18]L. Li, J.Y. Ralpem, V. Bahl, Y.M. Wang and R. Wattenhofer, “Analysis of a Cone-Based Distributed Topology Control Algorithms for Wireless Multi-hop Networks”, Proc. ACM
Qmpasium on Principle of Distributed Computing (PUDCJ, 200 I . 17(8): 1333-1344, August 1999.