基於無線感測網路不規則訊號之凸包協助定位方法
A Convex Hull-Based Localization Scheme for Irregular Wireless Sensor
Networking Characteristics
許酉遠
紀光輝
江季翰
國立雲林科技大學電機工程所 國立雲林科技大學電機工程系 國立虎尾科技大學資訊工程系
g9612715@ yuntech.edu.tw [email protected] [email protected]
摘要―無線感測網路(Wireless Sensor Networks)應
用是重要的研究領域之一。許多應用包括環境監 控、事件偵測、路由探索、災害救援和物件追踨等 皆需得知實際位置的資訊,因此,定位技術是無線 網路的關鍵技術。現今的定位方法大多假設無線訊 號涵蓋範圍是理想且穩定的,然而無線訊號的傳送 過程中充滿許多變數和不可預期性,包涵訊號隨著 路徑衰減、地形、自然環境和人為障礙物等,皆有 可能造成訊號電磁波的吸收、反射、折射和繞射, 進而形成無線訊號功率的衰減,使得通訊涵蓋範圍 產生不規則的形狀。 行 動 節 點 協 助 定 位 (mobile anchor-assisted schemes)方法研究中,雖然無線感測網路多佈建於 寬廣的戶外空間,並假設行動定位節點皆能利用 GPS接收器來接收衛星的訊號,定出實際的位置, 然尚需面臨行動定位節點不停移動、通訊環境的障 礙物等因素。此外,行動定位節點在戶外空間移 動,容易造成封包遺漏。有鑑於此,本研究希望提 供一種較精確的戶外無線感測網路環境的定位方 法,相較於有範圍基礎(range-based)的定位方式, 我們不需依賴量測基準包括角度、距離、訊號強度 等來達到定位,以節省無線感測器能源的消耗,另 一方面,本研究將不規則訊號範圍視為非凸面的訊 號範圍,並以凸包(convex hull)演算法,來解決非 凸面的不規則訊號問題,以確保在戶外也有相當精 確的定位能力。
一、前言
無線感測網路(Wireless Sensor Networks)技 術日益進步,服務應用亦蓬勃發展,例如智慧家庭 應用,無線感測網路讓人們享有更安全、健康、便 利、舒適的生活型態與空間。在無線感測網路的應 用中,定位(Localization)技術一直是任何型態的無 線網路的必要機制。對於大多數無線感測網路的應 用而言,如何得知無線感測節點的位置是一個核心 議題,蓋因無線感測節點所收集的資料在傳送時, 通常需嵌入位置資訊,以便使用者能在眾多的資料 中萃取區所關注的資訊並增加資料的可利用度。例 如:假使在偵測森林火災的感測器網路中,若此無 線感測網路在開始監測前,能事先取得每一個感測 節點的位置資訊,當火災發生時,偵測到溫度升高 的感測器便可將警告訊息包含著感測器所在的地 理位置資訊立即傳送至後端的資料匯集點(Sink), 進而緊急通知消防隊至該地進行滅火,如此可有效 地減少因災害所造成的損失。 現 今 多 數 的 定 位 技 術 皆 是 採 用 訊 號 強 度 (Received Signal Strength Indication, RSSI)測距技 術來計算物體位置,雖然訊號強度測距技術可被廣 泛使用且具有低部署成本的特性,但是它存在著一 個眾所皆知的挑戰,在無線感測網路中訊號易受到 環境影響而訊號衰減,其中亦包含著雜訊(Noise), 而雜訊會導致訊號強度變的不穩定,致使測距結果 失敗。而在行動節點協助定位方法研究中,雖然無 線感測網路環境運用於寬廣的戶外,並假設行動定 位節點皆能利用全球定位系統接收衛星的訊號,定 出實際的位置,然而還面臨許多的問題,包括現實 環境中的無線不規則訊號、行動定位節點不停移 動、通訊環境的障礙物、訊號吸收或反射和無線通 訊自然衰減等,皆為行動節點協助定位方法不得不 面對的問題。 有鑑於此,本研究以最惡劣的無線感測網路 環境為前提,希望提供一個適用於各種戶外無線感 測網路環境的定位方法,本研究的方法搭配幾何中 的凸包(Convex-Hull)演算法,來解決非凸面的不規 則訊號,並以最小外接圓的定位方法來達到位置的 估測,進而提升定位準確率,另外本研究也試著做 定位次數的計算,以最符合收集的定位封包量來達 到定位的最佳效果,進而達到增進各項應用的效 益,並降低無線感測器能源的消耗。
二、文獻探討
2.1 無線感測網路定位方法 在目前無線感測網路定位方法中,首先會以 集中式定位方法和分散式定位方法做區分,集中式 的定位方法主要是以將所有可能幫助定位的資訊 不斷傳送到資料匯集點(Sink)或無線感測網路閘道 器(Wireless Sensor Network Gateway),如圖1所示,接著在利用資料匯集點或無線感測網路閘道器 的運算能力,來計算所有分佈的無線感測器的決對 位置,然而當數以千計的無線感測節點都需定位 時,會造成資料匯集點計算能力大大的消耗,如 MDS-MAP定位演算法[16],因而發展出分散式定 位方法。 圖 1 感測網路傳輸流程 分散式定位演算法為目前最常使用的定位方 式,分散式定位方法不需集中方式的計算,而依靠 每一個感測節點利用鄰近節點來估測節點本身的 位 置 [1] 。 此 方 法 大 致 分 為 三 大 類 : 範 圍 基 礎 (Range-Based)定位方法、無範圍基礎(Range-Free) 定 位 方 法 和 行 動 節 點 協 助 定 位 方 法 (Mobile Anchor-Assisted Schemes)。 範圍基礎(Range-Based)的定位方式 此方法是利用量測距離或是角度來計算估測 無線感測節點的位置,在範圍基礎(Range-Based) 的方法中,感測節點會搭配其它的硬體裝置,並透 過距離或角度來進行測量,最後利用三角定位或估 測方式來判斷本身節點的位置。此測量方法需透過 不同的測量基準來取得定位的資訊,例如:時間測 量法(TOA)[3],時間差(TDOA)[4],角度測量法 (AOA)[5],或接收強度訊號指標法(RSSI)[7]。然而 這些方法除了強度訊號指標法外,皆需搭配其它的 硬體裝置來達到定位,但對於講求低能源的無線感 測器來說,加裝硬體裝置反而造成能源上的消耗。 無範圍基礎(Range-Free)定位方式 無範圍基礎定位方法顧名思義用於寬廣的空 間且無地方上的限制,大部份無範圍基礎定位演算 法利用不停廣播已知座標的方式來達到定位,不需 在每個感測節點加裝額外的硬體裝置,只需要少部 份的已知座標或有加裝全球定位系統(GPS)感測器 及可。例如:Centroid是利用己知位置參考節點週 期性的廣播位置的封包,感測器收集且計算所有聽 到的參考點座標,將其重心為感測節點的位置 [8]。DV-Hop利用已知位置的參考節點到感測節點 的跳躍數(Hop Count)來推測平均一個跳躍的距 離,並廣播此資訊,當感測器收到廣播資訊後,藉 由參考點的跳躍數計算本身與參考點的距離,滿足 三個參考點以上的距離資訊,感測器便可估算出本 身的位置[9]。APIT是利用三角形的構成點,並搭 配GPS或其他方法獲得位置資訊,藉由定位裝置產 生的信標(Beacon),讓未知感測節點來判斷是否在 這些點形成的三角形內,利用這些三角形形成區域 的交集,來估算本身的位置,當未知感測節點在三 角形內時相對應的計數器加一,否則計數器減一, 當計數器數字為最大的區域即為其所估計自己所 在的區域,此區域的中心位置即為感測器估計所在 的 位 置 [10] 。 CAB(Concentric Anchor-Beacons , CAB)是利用傳送不同訊號強度的訊號,在判斷感 測節點是否位於交集區域,感測器藉由收到訊號強 度傳送的距離來估算出本身所在的區域,區域的中 心位置即為估計所在的位置。 然而以上的方法,皆需要依靠已知的固定感 測節點座標或有加裝全球定位系統(GPS)感測器, 如圖2所示,因此造成佈建無線感測網路環境硬體 成本始終居高不下,而為了降低更多硬體裝置成 本,後續許多學者提出以少量搭配全球定位系統的 可移動感測器來達到定位的功能,在此稱為行動節 點 協 助 定 位 方 法 (Mobile Anchor-Assisted Schemes)。 圖 2 固定感測節點和待定位節點 行 動 節 點 協 助 定 位 方 法 (Mobile Anchor-Assisted Schemes) 隨著無線行動感測器網路研究蓬勃發展,感 測器節點以自主性的感測並收集資訊的方法不勝 枚舉[13],因此在行動節點協助定位方法中,無線 感測網路環境是利用感測節點和行動參考節點所 構成,感測節點以不固定排列方式分布於感測區 域,每一個行動參考節點都有裝載全球定位系統並 能自由的移動,如圖3所示,現今已有許多學者設 計並實現此行動定位節點[12]。當行動定位節點移 動時,週期性的廣播本身的座標給鄰近的感測節 點,感測節點則利用收到行動參考節點送出的定位 封包計算出本身的估測位置。
圖 3 行動節點協助定位方法環境
2.2 行動節點協助定位方法文獻探討
RSSI Using Mobile Anchor
此方法[16]是利用行動定位裝置不斷發送位 置座標在散佈感測器的範圍裡面移動,當感測器接 收到行動定位裝置所發送的訊號時,藉由收到的訊 號強度(RSSI)判斷感測器和行動定位裝置發送訊 號的位置之間的距離,以行動定位裝置發送訊號的 位置為圓心,距離為半徑形成一個圓,當行動定位 裝置不斷的移動形成了許多的圓,則感測器以這些 圓的交集區域的中心位置為估測的定位位置,如圖 4所示。
圖 4 RSSI Using Mobile Anchor 示意圖
Mobile Anchor Points
此論文[19]以感測器和行動定位裝置的最大 通訊距離為圓的半徑,當感測器第一次收到行動定 位裝置傳來的訊息時,感測器會記錄訊息上的位置 為信標點(Beacon Point)和直到最後一個收到訊息 的位置座標當感測器記錄了三個以上的信標點 時,即可形成圓上兩條不平行的弦,兩條弦的中垂 線交點即為感測器估計所在的位置,如圖5所示。
圖 5 Mobile Anchor Points 示意圖[19]
Mobile Anchor Positioning
Mobile Anchor Positioning簡稱MAP[1],此方 法利用兩個有相同半徑已知圓心座標的相交圓,估 算出兩個交叉點的座標。因此兩個圓弧中會有兩個 交點,接著依靠其它信標點利用距離小於半徑的方 式確認兩個交叉點的其中一個,另外此方法也可利 用其它已定位的無線感測器,來協助未知感測器定 位,進而加快定位所花費的時間。
圖 6 Mobile Anchor Positioning 示意圖[1]
Three Dimensional Localization Algorithm
此研究[20]以Mobile Anchor Points[19]定位 方法為基礎,利用自由空間方程式和位元錯誤率導 出信標點並非於圓周上論點,改善Mobile Anchor Points[19]定位方法,此方法假設行動定位節點路 徑為一直線,並找出最大訊號強度的信標點,當最 大訊號強度的信標點為最接近圓心的位置,利用兩 條路徑與最大訊號強度的信標點位置做垂直線,垂 直線交點及為未知節點的定位位置。
圖 7 Three Dimensional Localization Algorithm 示意 圖[20] 2.3 行動節點協助定位方法面臨問題 在行動節點協助定位方法研究中,雖然無線 感測網路環境在於寬廣的戶外,並假設行動定位節 點皆能利用全球定位系統(GPS)接收衛星的訊號, 定出實際的位置,然而除此之外還面臨許多的問 題: 通訊環境 在戶外無線訊號環境中,包含地形、大氣損 耗、建築物、山丘、樹木遮擋和人為障礙物等,皆
有可能造成對訊號電磁波的吸收或反射,進而造成 無線信號功率的衰減,如圖8所示,使得無線信號 的傳送充滿了變數和不可預期性。依據Ganggang Yu 學 者 提出以 Friis 自 由 空 間 方 程 式 (Friis Free Space Equation, FFSE) 和 位 元 錯 誤 率 (Bit-Error Rate, BER),利用數學公式導出自由空間的電波損 耗搭配移動中位元錯誤率,証明在戶外無線通訊是 無法理想的穩定且呈現圓形[15],另一方面,自由 空間方程式是以直視路線(Line of Sight,LOS)為考 量,在傳輸端與接收端假設無任何阻礙情況下作基 礎,另外也忽略環境障礙物對電磁波的吸收,因此 在戶外無線通訊除了自然衰減外,還包括障礙物對 電磁波的吸收和行動節點不停移動產生的位元錯 誤,這些皆有可能造成錯誤率的提升。 圖 8 通訊環境示意圖 不規則訊號 訊號不規則在無線通訊是不可乎略的問題, 現有大多數研究中都假設無線電涵蓋範圍是極度 理想且穩定的圓形形狀,然而在現實的狀況裡,無 線訊號的涵蓋範圍卻是極度動態且不規則的。在實 際的實驗根據中[14],Gang Zhou學者以Berkeley所 開發的MICA2感測器為例,經過角度和距離的實 際測量,以10英呎範圍在接收100信標(Beacon)的 實際測量中,訊號強度皆有所不同,如圖9所示, 另外其它的實驗中,不同的距離所接到的訊號得到 非相同的數據,接著在固定接收訊號強度-55.5 dBm和-59 dBm實驗中,所呈現的訊號範圍,如圖 10所示,由以上實驗數據結果得知,無線訊號在實 際的環境中為不規則跳動的。 圖 9 訊號強弱接收實驗[14] 圖 10 不同功率訊號實驗[14] 文獻總結 在 相 關 行 動 節 點 協 助 定 位 方 法 (Mobile Anchor-Assisted Schemes)研究中,各種定位方法皆 有利弊,如圖11所示,以Mobile Anchor Points [19] 和Mobile Anchor Positioning[1]講求快速的定位方 法,對於群體感測節點達到定位時間相當訊速, RSSI Using Mobile Anchor[16]利用訊號強度來增 進定位的準確度,然而利用訊號強度的方法運用於 戶外,面對各種戶外環境的不同,皆需做事先的測 量來換算距離,來達到增進的準確度,而Mobile Anchor Points與Mobile Anchor Positioning皆以通 訊範圍為圓的方式呈現,對於訊號不規則的環境中 大大影響定位的準確度,在 Three Dimensional Localization Algorithm[20]研究為目前最佳的定位 方式,但對於行動節點的移動方法只能直線的方式 行走,在障礙物林立的戶外空間中,簡直不可能成 立。 圖 11 無範圍基礎定位比較
三、研究方法
目 前 各 種 行 動 節 點 協 助 定 位 方 法 (Mobile Anchor-Assisted Schemes)研究中,少有研究針對不 規 則 訊 號 (Radio Irregularity) 提 出 較 好 的 定 位 方 式,本研究希望提出一種改進不規則訊號定位方 法,稱為A Convex Hull-Based Localization Scheme (ACHLS) , 主 要 考 量 可 種 不 規 則 訊 號 (Radio Irregularity)下的影響,改善不規則訊號導致定位準 確度大大降低的原因。 3.1 定位方法環境假設 本研究所提出定位方法的環境主要運用於戶 外空間,在感測節點方面主要由靜態無線感測器 (Static Sensor Node) 和 動 態 無 線 感 測 器 (Mobile Anchor)或稱為行動定位節點建構而成,靜態無線 感測器主要接收動態無線感測器發出定位封包 (Beacon Packet)和收集環境中的感測資料並加以轉 送,而動態無線感測器會以隨意的方式行走,如圖 12所示,並搭配衛星定位系統以無線感測網路環境 中發送目前定位的實際位置封包。 圖 12 通訊環境建置 在無線通訊訊號部份,為了符合實際通訊環 境,因此考量不規則訊號的問題,以不規則訊號模 型(Radio Irregularity Model)做為通訊環境的基礎 [14],不規則訊號模型依據不規則指數(Degree Of Irregularity,DOI)來定義不規則狀態,當不規則指 數愈高時,所呈現的訊號範圍更為崎嶇,如圖13 所示。 圖 13 不規則訊號範圍 而不規則訊號模型如方程式1所示,ri代表圓 的0到360度各角度的半徑,rmin為無線感測器通訊 的最小範圍,由於通訊環境的不可預期狀況加上行 動定位節點無法任意穿越障礙物的情況下,因此本 研究假設為0,rmax為無線感測器通訊的最大範圍, X代表-1到0之間的亂數,D代表不規則指數,然而 各角度間半徑不可超過半徑的最大值與最小值。
(
)
(
)
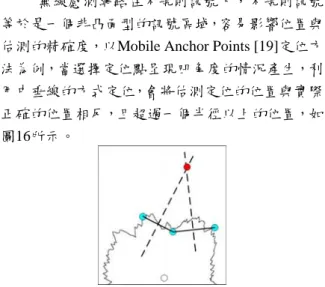
. , 360 0 0 , , 5 . 0 max min min max 1 max min r r r where i i if if D r r X r r r r i i i ≤ ≤ < < = ⎩ ⎨ ⎧ − ± + − ... (1) 3.2 行動定位點的選擇 在行動定位節點(Mobile Anchor)以不規則的 方式行走於無線感測網路的範圍中,當行動定位節 點接進靜態的無線感測器(Static Sensor Node)時, 靜態無線感測器會接收到動態無線感測器的廣播 定位封包(Mobile Beacons),如圖14定位封包所 示,並以行動定位節點的ID和時戳方式記錄各個時 間點,和行動定位節點所移動的情況。 圖 14 定位封包 當行動定位節點不斷移動和不斷廣播本身移 動節點的位置,同時靜態感測節點也不斷的接收行 動定位節點所發出的位置資訊,如圖15所示,隨著 不同的行動定位節點的ID分辦,以進入第一個定位 封包T0開始紀錄,隨著行動定位節點移動記錄著 T1、T2、T3 、T4 、T5和T6,當動態感測節點已 經離開靜態感測節點的範圍,靜態感測節點的還是 不斷的等待行動定位節點發送定位封包,直到超過 一個封包發送的時間間隔(Beacon Interval),靜態感 測節點及會抓取剛定位封包紀錄的頭與尾,也就是 第一個和最後一個定位封包的位置資訊(Anchor Points),直到下次行動定位節點接近時,紀錄的序 列會重新由零開始記算。 圖 15 選擇行動定位點 3.3 凸包協助方法無線感測網路在不規則訊號下,不規則訊號 等於是一個非凸面型的訊號區域,容易影響位置與 估測的精確度,以Mobile Anchor Points [19]定位方 法為例,當選擇定位點呈現凹角度的情況產生,利 用中垂線的方式定位,會將估測定位的位置與實際 正確的位置相反,且超過一個半徑以上的位置,如 圖16所示。
圖 16 Mobile Anchor Points 在不規則訊號範例 本研究以計算幾何(Computational Geometry) 中的Graham's Scan凸包演算法[21]來解決不規則 訊號下非凸面型訊號所造成的影響,Graham's Scan 演算法的時間複雜度只需O(n log n),也為Convex Hull演算法中較常使用的演算法,當行動定位節點 不斷的移動,靜態無線感測器接收的定位封包 (Anchor Points)愈來愈多,以收集來的定位封包 ( (Anchor Points)當作點集合Q{ Q1, Q2,…, Q11}, 如圖17所示。 圖 17 定位封包點集合 接著利用向量的方式將p0與X所交之夾角, 將Q所有定位封包點集合作由小到大排序,如圖18 所示,結果分別為P1, P2, … , P11,若角度相同 者,只取與P0最遠者。 圖 18 排序定位封包點集合 接下來根據Graham's Scan演算法方式計算 [21],如圖19所示,判斷每點的上一點和下一點的 角度為左轉或右轉,如圖20所示,直到不為左轉才 將點放入堆疊中。 Graham-Scan(Q) Input:平面上之點集合
Output:Q 之 Convex Hull:Stack S
1 P0 為 Q 中最低的點,及為 Y 座標最小點, 當相同時為 X 最小者; 2 Q 中剩下的點與 P0形成向量,與 X 所交之 夾角,由小到大排序,令其分別為 P1, P2, 等 , Pn,若角度相同者,只取 P0最遠者; 3 Push(p0, S); //S 為 Stack 4 Push(p1, S); 5 Push(p2, S); 6 for i ← 3 to m do
7 while (從 next-to-top(S) 到 top(S) 再到 pi 為右彎)
8 do Pop(S) ;
9 Push(pi, S);
10 return S;
圖 19 Graham's Scan 演算法 // isLeft(): tests if a point is Left|On|Right of an infinite line.
Input: three points P0, P1, and P2
Return: (P1.x - P0.x)*(P2.y - P0.y) - (P2.x - P0.x)*(P1.y - P0.y);
// if Return >0 for P2 left of the line through P0 and P1
// Return =0 for P2 on the line // Return <0 for P2 right of the line
圖 20 左右轉判斷演算法 最後利用Graham's Scan演算法找出最接近圓 周的定位封包的位置,並捨棄不準確的定位封包, 如圖21所示。 圖 21 Convex-Hull 選擇行動定位點 3.4 定位的計算 在利用Graham's Scan演算法找出最接近圓周 的定位封包,以達到更容易找出定位封包中點集合 的最大距離AB,捨棄許多不準確定位封包的尋 找,如圖22所示,並且所尋找出來的最大弦AB可
適為最接近實際感測節點位置中訊號圓的直徑,進 而可將不規則訊號所產生的定位誤差大大的減低。 圖 22 點集合找最大直徑 接著利用尋找出來的最大距離
AB
中,找出 最大距離的中點,接著利用最大距離的中點來從 Convex-Hull後點集合中找尋一定位點,而此定位 點與最長弦中點為最長者,如圖23所示。 圖 23 中點找尋最長的點 在尋找完距離最大距離和與最大距離中點的 最長線的第三點後,及可計算預估無線感測器的位 置,利用三角形外心的方式,以中垂線的方法估測 出位置的所在,如圖24所示,計算分別為 AD 與BD 兩條線中垂線LDA與LDB,最後中垂線交點及為估測 的無線感測器定位位置,如方程式2所示。 圖 24 定位計算 ). 2 / ) )(( ( ) 2 / ) )(( ( , , ), 2 / ) )(( ( ) 2 / ) )(( ( , , , ), * * /( ) * * ( ), * * /( ) * * ( : : D B D B D B D B DB D B DB D B DB D A D A D A D A DA D A DA D A DA DA DB DB DA DA DB DB DA DA DB DB DA DA DB DB DA DB DB DB DB DA DA DA DA y y y y x x x x c y y b x x a y y y y x x x x c y y b x x a where b a b a c a c a y b a b a b c b c x c y b x a L c y b x a L + − + + − = − = − = + − + + − = − = − = − − = − − = ⎩ ⎨ ⎧ = + = + . (2) 當最大的弦的中點與第三點的距離等於最大 弦的一半時,如圖25所示,利用外心的方法畫圓, 第三點必定為圓上的一點,並與最大弦呈九十度直 角三角形。 圖 25 中線等於半徑 當最大弦的中點與第三點的距離超過一半的 最大弦時,如圖26所示,所畫出的三角形必為銳角 三角形,利用外心的方式畫圓,圓心必為銳角三角 形的內部,且接近最大弦的中點。 圖 26 中線大於半徑 最後如圖27所示,當最大弦的中點與第三點 的距離小於一半的最大弦時,所畫出的三角形必為 鈍角三角形,利用外心的方式畫圓,圓心必為鈍角 三角形的外部,由這三張圖的推導可知,利用外心 畫出來的圓心,一定會包覆所有的Convex-Hull點 集合。圖 27 中線小於半徑
四、模擬結果
本 研 究 模 擬 的 環 境 為 行 動 定 位 節 點 在 500*500 m2中隨意的行走,而200個靜態感測器以 亂數的方式部屬於此範圍中,每個感測器的通訊半 徑為20公尺,並根據不同的訊號不規則指數來做為 實驗的數據。在系統環境中,預設參數如下: 1. 以不同的訊號不規則指數為模擬的代表,分 別為 DOI 0.03、DOI 0.05、DOI 0.1。 2. 利用方程式 3 算出平均定位的錯誤率,N 代 表靜態的感測節點個數,(Xei,Yei)為利用本演 算法所估測的定位位置,(Xi,Yi)為實際正確 的感測器位置,R 代表通訊半徑。 3. 以相同和不同的行動定位點個數來進行模 擬,。 4. 實驗的數據取五百次模擬之平均值為代表。 R N Yi Yei Xi Xei N i * ) ( ) ( Error on Localizati Average 1 2 2∑
= − + − = .... (3) 4.1 定位準確度模擬 如圖28所示,為不規則指數0.03情況下,本 研 究 的 方 法 與 Mobile Anchor Points 及 Three Dimensional Localization Algorithm的定位方法做 比較,在一開始收集的行動定位點封包數量很少的 情況,本研究的方法和其它兩個方法不相上下,錯 誤率也都非常的高,但隨著定位點封包的數量愈來 愈多時,本研究的方法非常明顯的下降很多,也就 是 錯 誤率 變低 準 確率 變的 更 好, 而由 於 Mobile Anchor Points定位方法是根據任意三點求中垂線 的方法,因此倒置模擬的錯誤率不斷的上下跳動, 有時找到凸面訊號時,定位的位置也會在實際定位 點的通訊範圍內,否則就為通訊範圍外,進而錯誤 率就會變的非常的高,也較為不準確,另外Three Dimensional Localization Algorithm 在 錯 誤 率 方 面,在本摸擬的環境為行動定位點會亂機且隨機的 移 動 , 並 有 自 己 閃 避 的 功 能 , 使 得 Three Dimensional Localization Algorithm錯誤率也非常的高,雖然此方法是利用最大的訊號強度為依據, 照理說會最接近目標位置,但由於進入無線感測網 路的通訊範圍並非和最近的定位點呈直的關係,倒 置正確率也非常的低,如圖29所示,當收集到三百 個定位封包所平均下的準確度,當不規則訊號0.03 時,本研究的方法錯誤率遠遠的低於兩個方法。 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.91 1.1 1.2 1.3 1.4 1.5 3 5 7 9 11 13 15 17 19 21 23 25 27 29
Number Of Beacon Points
Av er ag e L o cal iz at io n er ro r (r ) Our Scheme Mobile Anchor Points Three Dimensional Localization Algorithm 圖 28 Doi 0.03 不規則訊號下定位模擬 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 A ve ra ge L oc aliz atio n E rro r (r) Mobile Anchor Points Three Dimensional Localization Algorithm Our Scheme 圖 29 Doi 0.03 每個定位封包平均錯誤率 在不規則訊號下0.05的情況下,如圖30所 示,隨著不規則指數的增加,在三個方法的定位錯 誤率也很明顯的增加,整體的錯誤率就像增加一 格,以Mobile Anchor Points定位方法還是一樣,上 下的不斷起伏,另外Three Dimensional Localization Algorithm方法中,錯誤率好像有顯少的降低,但 本研究的方法,雖然錯誤率很上提高,但與其它兩 個方法相比,還是少了很多,如圖31所示。 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1 3 5 7 9 11 13 15 17 19 21 23 25 27
Number Of Beacon Points
Av er ag e L oca liz ati on E rr or (r ) Our Scheme Mobile Anchor Points Three Dimensional Localization Algorithm 圖 30 Doi 0.05 不規則訊號下定位模擬 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 A ver ag e L oc al iza tio n Error (r) Mobile Anchor Points Three Dimensional Localization Algorithm Our Scheme 圖 31 Doi 0.05 每個定位封包平均錯誤率
最後在不規則訊號指數0.1的情況下,如圖32 所示,由於不規則訊號已經在非常糟糕的情況,本 研究的方法雖然一開始的定位錯誤率也非常的 高,但隨著靜態感測節點收集愈多的行動定位封 包,錯誤率也開始慢慢的降低,但由於訊號離非常 糟糕,Mobile Anchor Points定位方法的錯誤率也很 明顯的升高,甚至快接近一個半徑的距離,而在 Three Dimensional Localization Algorithm中,因為 訊號非常糟糕而倒至訊號的範圍比較小,進而提升 了此方法的準確率,這是模擬出與想像不一樣的情 況,雖然此方法降低了錯誤率,但與本研究的方法 相比,還是本研究的方法較為準確,如圖33為收集 三百個定位封包的平均每個封包的錯誤率。 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.91 1.1 3 6 9 12 15 18 21 24 27
Number Of Beacon Points
A ve ra ge L oc aliza tio n erro r(r) Our Scheme Mobile Anchor Points Three Dimensional Localization Algorithm 圖 32 Doi 0.1 不規則訊號下定位模擬 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 Average L ocali zati on Error (r) Mobile Anchor Points Three Dimensional Localization Algorithm Our Scheme 圖 33 Doi 0.1 每個定位封包平均錯誤率 4.2 凸包取點模擬 如圖34所示,為不規則訊號指數0.03情況下 摸擬凸包取點,在多邊形與外接圓關係下,隨著正 多邊形愈多面積會愈大,也會愈接近圓,而且所取 的凸包也會最多,因此在不規則訊號指數0.03的情 況下,相較於不規則訊號指數0.05和0.1最為接近 圓,在定位點隨著行動定位感測器的移動而增加, 利用本演算法篩選較為準確的定位點,捨棄不準確 的定位封包個數,從60個定位節點開始,選擇的定 位點開始緩慢的增加,到360個定位節點,選擇的 定位節點也不超過20個,因此由此模擬實驗可知, 在不規則訊號環境下,愈多的定位節點並非可增加 定位的準確率,如果隨著定位節點的增加,重新估 測定位的位置,只會造成感測器的能源耗損,不能 增加定位效益。 0 5 10 15 20 25 3 31 59 87 115 143 171 199 227 255 283 311 339
Number Of Beacon Points
Choosi ng Bea con Point s 圖 34 凸包取點模擬 4.3 不規則訊號指數模擬 在以相同26個的定位封包情況下,如圖35所 示,為根據不同的不規則訊號指數來摸擬,在 Mobile Anchor Points定位方法中,由於不規則訊號 愈高,所形成的凹面訊號會愈多,進而影響定位的 準確率,也隨著不規則指數愈高,定位的準確率也 愈來愈下降,另外在Three Dimensional Localization 定位方法,雖然不會隨著不規則指數的變化而產生 極大的影響,但也由於行動定位節點的不規則移動 和閃避障礙物的功能,倒置此方法的準確度一直呈 現不精確的狀況,雖然隨著不規則指數的變化,而 產生的訊號範圍縮小,但整體來看,錯誤率的下降 幅度並沒有差異非常的大,而本研究的方法雖然錯 誤率有隨著不規則指數的變化而產生影響,但起伏 是這三個方法中最小的,並且準確率也是最高的。 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 0.01 0.03 0.05 0.07 0.09 0.11 0.13 0.15 0.17 0.19 DOI(Degree Of Irregularity) Av erag e L o ca li zat io n E rr o r (r ) Our Scheme Mobile Anchor Points Three Dimensional Localization Algorithm 圖 35 不規則訊號指數模擬
五、結論
本論文主要探討無範圍基礎中的行動節點協 助定位方法,相較於範圍基礎的定位方法,本研究 的定位方法不需使用任何的量測基準包括角度、距 離、訊號強度等來達到定位,只需要少部份持有 GPS接收器的行動定位節點在無線感測網路分佈 範圍隨意行走及可,相較於其它行動節點協助定位 方法,本研究的方法不需限制行動定位節點的移動 方式。另一方面,本研究提出的方法以適用於無線 感測網路環境為考量,以各種不規則訊號指數來模 擬戶外空間所面臨的問題,並且沒有保證訊號範圍 一定能接收到通訊封包的假設為前提,利用凸點演 算法改善不規則訊號範圍造成定位錯誤的影響,最 後利用最小外接圓的方式來定出估測的位置。本論文希望提供一個適用於容易造成不規則訊號範圍 的戶外無線感測網路環境定位方法,改善現有大多 數的定位研究,以假設無線電涵蓋範圍是極度理想 且穩定的圓形形狀,並在摸擬指出,相較其它的方 法,在不規則訊號下定位更為精確。
誌謝
本研究由國家科學委員會計畫 NSC 98-2918-I-224- 001 及 NSC 98-2622-E-150-077-CC3 補助支持,特 此誌謝。六、參考文獻
[1]. W.-H. Liao and Y.-C. Lee, “A Lightweight Localization Scheme in Wireless Sensor Networks,” International Conference on Wireless and Mobile Communications (ICWMC 2006), Bucharest, Romania, July 29-31, 2006.
[2]. K. Kim and W. Lee, “MBAL: A Mobile Beacon-Assisted Localization Scheme for Wireless Sensor Networks,” International Conference on Computer Communications and Networks (ICCCN 2007), pp. 57—62, 2007.
[3]. B. H. Wellenhoff, H. Lichtenegger, and J. Collins, Global Positioning System: Theory and Practice, Fourth Edition, Springer Verlag, 1997.
[4]. N. B. Priyantha, A. Chakraborty, and H. Balakrishnan, “The Cricket Location-Support System,” ACM/IEEE MobiCom 2000, pp. 32—43, Boston, MA, August 2000.
[5]. D. Niculescu and B. Nath, “Ad Hoc Positioning System (APS) Using AoA,” IEEE INFOCOM, 2003. [6]. D. Niculescu, “Positioning in Ad Hoc Sensor
Networks,” IEEE Networks, Vol. 18, No. 4, pp. 24—29, July 2004.
[7]. P. Bahl and V. Padmanabhan, “RADAR: An In-Building RF-Based User Location and Tracking System,” IEEE INFOCOM 2000, Tel-Aviv, Israel, March 2000.
[8]. N. Bulusu, J. Heidemann, and D. Estrin, “GPS-less Low Cost Outdoor Localization for Very Small Devices,” IEEE Personal Communications Magazine, October 2000.
[9]. D. Niculescu and B. Nath, “Ad-Hoc Positioning System,” IEEE GlobeCom, November 2001.
[10]. T. He, C. Huang, B. Lum, J. Stankovic, and T. Adelzaher, “Range-Free Localization Schemes for Large Scale Sensor Networks,” in Proc. of ACM MobiCom, San Diego, CA, USA, Sept. 2003. [11]. V. Vivekanandan, V.W. Wong, “Concentric Anchor
Beacon Localization Algorithm for Wireless Sensor Networks”, IEEE Transactions on Vehicular Technology, Vol. 56, pp. 2733—2744, Issue 5, Sept. 2007.
[12]. J.-P. Sheu, K.-Y. Hsieh and P.-W. Cheng, “Design and Implementation of Mobile Robot for Nodes Replacement in Wireless Sensor Networks,” Journal of Information Science and Engineering, Vol. 24 No. 2, pp. 393—410, March 2008
[13]. J. Friedman, D. Lee, I. Tsigkogiannis, P. Aghera, A. Dixit, D. Levine, D. Chao, A. Kansal, W. Kaiser, and M. Srivastava, “Ragobot: A New Hardware Platform for Research in Wireless Mobile Sensor Networks,”
International Conference on Distributed Computing in Sensor Systems, pp.412—412, 2005
[14]. G. Zhou, T. He, S. Krishnamurthy, and J. Stankovic, “Impact of Radio Irregularity on Wireless Sensor Networks,” In Proc. the Second International Conference on Mobile Systems, Applications, and Services (MobiSys), June 2004.
[15]. G. G. Yu, F. Q. Yu, and L. Feng,“ A Localization Algorithm Using a Mobile Anchor Node Under Wireless Channel“, In Proc. 2007 IEEE International Conference on Robotics and Biomimetics, December 2007
[16]. Y. Shang, W. Ruml, and Y. Zhang, “Localization from Mere Connectivity”, In Proc. 10th Annual International Conference on Mobile Computing and Networking, 2003.
[17]. Y. Shang and W. Ruml, “Improved MDS-based Localization”, IEEE INFOCOM 2004, Hong Kong, March 2004.
[18]. M. L. Sichitiu and V. Ramadurai, “Localization of wireless sensor networks with a mobile beacon,” Center for Advances Computing Communications, North Carolina State Univ., Tech. Rep. TR-03/06, Jul. 2003.
[19]. K.-F. Ssu, C.-H. Ou, and H. C. Jiau, “Localization with Mobile Anchor Points in Wireless Sensor Networks,” IEEE Trans. Vehicular Technology, Vol. 54, No.3, May 2005
[20]. G. Yu , F. Yu, L. Feng, “A Three Dimensional Localization Algorithm Using a Mobile Anchor Node under Wireless Channel”, IEEE World Congress on Computational Intelligence (WCCI), 2008
[21]. Graham's Scan,
http://softsurfer.com/Archive/algorithm_0109/algorit hm_0109.htm