國 立 交 通 大 學
機 械 工 程 學 系
博 士 論 文
地面反力與人體慣性參數之誤差
對步態分析結果的影響
Influence of Errors in Ground Reaction Forces and Segmental Inertial
Properties on the Calculated Variables in Human Gait Analysis
研 究 生:謝 宏 榮
指導教授:洪 景 華 教授
曾 錦 煥 教授
呂 東 武 教授
地面反力與人體慣性參數之誤差對步態分析結果的影響
Influence of Errors in Ground Reaction Forces and Segmental Inertial
Properties on the Calculated Variables in Human Gait Analysis
研 究 生:謝宏榮 Student:Hong-Jung Hsieh
指導教授:洪景華 Advisor:Ching-Hua Hung
曾錦煥
Ching-Huan Tseng
呂東武
Tung-Wu Lu
國 立 交 通 大 學
機 械 工 程 學 系
博 士 論 文
A ThesisSubmitted to Department of Mechanical Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Doctor of Philosophy
in
Mechanical Engineering
June 2011
Hsinchu, Taiwan, Republic of China
地面反力與人體慣性參數之誤差
對步態分析結果的影響
學生:謝宏榮 指導教授:洪景華 教授
曾錦煥 教授
呂東武 教授
國立交通大學機械工程學系
摘要
摘要
摘要
摘要
目前步態分析己被廣泛運用於人體神經骨骼肌肉系統疾病之診斷以及治療 的規劃與評估。而步態分析主要利用運動學、人體測計學與測力板資料間接求得 人體下肢各關節所承受之作用力。因此,測力板所量測力量與壓力中心是否精 準,人體測計學所提供各肢段之質量、質心與慣性矩是否準確,對於步態分析之 研究結果有極大的影響。本研究研製一台對固定式測力板作靜態、動態校正的校 正器,校正器重量輕、體積小且裝有移動輔助輪,所以可快速移至實驗室作現地 校正。校正器固定方式採用吸盤吸附在實驗室地板上因此架設容易,對實驗室建 築物無侵入式破壞。校正器在施力點定位與施力大小的控制是採用 PC-based 控 制器,所以準確性高且快速。本研究利用靜態校正測試作為類神經網路訓練資 料,並將測力板量測力量與壓力中心作修正補償,在垂直力方向其力量誤差平均 值百分比在校正前是 0.38%,校正後降為 0.00%;在壓力中心 X、Y 軸方向其位 置誤差平均值在校正前 1.37mm、1.15mm,校正後降為 0.02mm、0.04mm。在動 態校正方面,在垂直力方向其力量誤差平均值百分比在校正前是-0.19 %,校正 後降為-0.03 %;在壓力中心 X、Y 軸方向其位置誤差平均值在校正前-0.50mm、 0.95mm,校正後降為-0.01mm、-0.11 mm 。本研究利用測力板校正器對自行研 製可測力量跑步機施以垂直力負載校正,並運用類神經網路校正方法來修正跑步 機所量測的力量與壓力中心之誤差。在垂直力方向其力量誤差平均值百分比在校 正前是 0.82%,校正後降為 0.01%;在壓力中心 X、Y 軸方向其位置誤差平均值 在校正前 1.59mm、0.71mm,校正後降為 0.07mm、-0.06mm。目前人體測計學不論是利用屍體或侵入性的方法在道德上均不適合兒童,而 少數非侵入性方法則因操作不易、設備取得困難、成本過高等因素無法適用於例 行臨床步態分析實務與研究。所以本研究利用動作追蹤系統量測各肢段之空間位 置及測力板量測力量與壓力中心,再運用最佳化方法來建立個人化人體測計學資 料,其中包含各肢段之幾何模擬、各肢段之質量、質心與轉動慣量。本研究受試 者選取 12 位健康成人(24±2 yrs; 69±8 kg; 178±5 cm)及 20 位健康兒童(9±3 yrs; 31±10 kg; 130±9 cm)。在靜態量測時,雙腳站立於測力板上,且擺 20 種不同姿 勢;在動態測試時,受試者則採屈膝下彎動作。本研究方法將求得人體測計學資 料與 Dempster(1955)、Cheng (2000)人體測計學資料文獻值代入本研究中之人體 數學模型作比較。在靜態準確性之壓力中心評估方面,成人壓力中心誤差平均值 本研究方法小於 5mm 內,而文獻方法在 11mm~19mm 之間;兒童壓力中心誤差 平均值本研究方法小於 4mm 內,而文獻方法在 15mm~25mm 之間。在動態準確 性之壓力中心評估方面,成人壓力中心誤差平均值本研究方法為 9.4mm 內,而 文獻方法在 20.6mm~27.9mm 之間;兒童壓力中心誤差平均值本研究方法為 7.9mm 內,而文獻方法在 24.8mm~31.1mm 之間。在動態準確性之垂直方向地面 反作用力評估方面,本研究方法與文獻方法在成人與兒童垂直方向地面反作用力 之誤差平均值是相近的。本研究成功發展一套非侵入性、快速、低成本、準確且 適合各種體型、性別及年齡的活體個人化測計學資料測量方法,並用以建立我國 成人與 6~12 歲兒童人體測計學資料庫,包括各肢段質量、質量中心及轉動慣量 等資料,以供臨床步態及動作分析之需。 關鍵字:地面反作用力、測力板、壓力中心、校正器、測力跑步機、人體測計學
Influence of Errors in Ground Reaction Forces and Segmental Inertial
Properties on the Calculated Variables in Human Gait Analysis
Student: Hong-Jung Hsieh Advisors: Dr. Ching-Hua Hung
Dr. Ching-Huan Tseng
Dr. Tung-Wu Lu
Department of Mechanical Engineering
National Chiao Tung University
Abstract
Clinical gait analysis is the process of using quantitative information, including kinematic, kinetic and anthropometric data to aid in understanding the etiology of gait abnormalities. It has been widely used in the diagnosis of patients with neuromusculoskeletal pathology, subsequent planning and evaluation of treatment. In human motion analysis, the kinetic data are usually obtained from forceplates mounted on the ground. Therefore, in situ calibration of the forceplate is necessary to improve the accuracy of the measured ground reaction force (GRF) and center of pressure (COP). The current study developed a small device (160 x 88 x 43 cm) with a mass of 50 kg, equipped with auxiliary wheels and fixing suction pads for rapid deployment and easy set-up. A PC-based controller enabled quick movement and accurate positioning of the applied force to the calibration point. After correction by an artificial neural network (ANN) trained with the static data from 121 points, the mean errors for the vertical GRF were all reduced from a maximum of 0.38 % to less than 0.00 %. Those for the X and Y components of COP were all reduced from a maximum of about 1.37 and 1.15 mm to less than 0.02 and 0.04 mm, respectively. For dynamic calibration, the mean errors for the vertical GRF were reduced from a maximum of -0.19 % to less than -0.03 %, while those for the X and Y components of COP were reduced from a maximum of -0.50 and 0.95 mm to less than -0.01 and
-0.11 mm. The results suggested that the calibration device with the ANN method will be useful for obtaining more accurate GRF and COP measurements. Thereafter, the device was used to calibrate our newly developed instrumented treadmill to measure GRF on the treadmill during successive cycles of gait. By the same error analysis and neural network methods, the measured GRF and center of pressure (COP) can be calibrated to reduce the errors. The results of calibration indicated that mean errors for the vertical GRF from a maximum of 0.82 % to less than 0.01 %, while those for the X and Y components of COP were reduced from a maximum of 1.59 and 0.71 mm to less than 0.07 and -0.06 mm.
Correct anthropometric data is also needed for accurate calculation of the motion data. Currently, anthropometric data are mostly obtained from studies on adult cadavers because no data exist for the children between 6 to 12 years of age. However, methods using cadavers or invasive techniques are not suitable for children. Noninvasive methods are either too difficult or too expensive to be used routinely in clinical settings. The current study therefore aimed to develop a noninvasive, fast, cost-effective and accurate method for the estimation of the anthropometric data of subjects with different ages. We proposed an optimization-based, non-invasive, radiation-free method for estimating subject-specific body segment inertial properties (BSIPs) by using a motion capture system and two forceplates. Twelve healthy adult
subjects (24±2 y/o; 69±8 kg; 178±5 cm) and twenty children (9±3 yrs; 31±10 kg;
130±9 cm) were recruited in this study. Firstly, a three-dimensional custom-made
model of the human body was developed for the simulation of the segment geometry; the estimation of the mass, center of mass and second moment of inertia of the segments and the whole body. Then the subject was asked to stand in twenty different postures for static test, and to perform squatting for dynamic test. The static and dynamic tests were used to customize the model to the subject with optimization method, and the subject-specific anthropometric data were the calculated
commonly used predictive methods (Dempter, 1955 and Cheng ,2000) in terms of the errors of the calculated COP and ground reaction force (GRF) using the corresponding predicted BSIPs. During stationary standing postures, the mean COP errors were less than 4 and 5 mm for the child and adult groups respectively, while those from the existing comparative methods ranged from 11 to 19 mm and 15 to 25 mm for these two groups respectively. During dynamic activities, mean COP errors from the current method were less than 7.9 and 9.4 mm for the child and adult groups respectively, while those from the existing methods ranged from 24.8 to 31.1 mm and 20.6 to 27.9 mm for these two groups respectively. In evaluation of the accuracy in vertical GRF during dynamic test, the mean error of vertical GRF from the current method showed similar values to the existing methods. The results showed that the current method was capable of producing estimates of subject-specific BSIPs that predicted accurately the important variables in human motion analysis during static and dynamic activities. In conclusion, this optimization-based and accurate method was developed for the estimation of the anthropometric data of subjects with different age groups for clinical gait or motion analysis. Being non-invasive and using standard motion laboratory equipment, the current method would be useful for building up the anthropometric data of adults and children in Taiwan.
Keywords: Ground reaction force, forceplate, center of pressure, calibrator, instrumented treadmill, anthropometry
誌謝
誌謝
誌謝
誌謝
終於完成了博士論文,心中充滿感恩,感恩此段攻讀博士學位期間任何對 我助益的人、事、物。首先要感謝恩師 曾錦煥教授與 呂東武教授在課業上不 辭辛苦的指導及生活上的照顧,尤其是在 2001~2003 年間跟隨恩師 曾錦煥教授 到北、中、南各大專校院舉辦國科會小產學推動說明會,這期間更看到他懇切熱 誠待人及做事情認真負責的態度,是足為後學之學習典範。雖他已不在人世,謹 將此『最佳化實驗室』師門最後一位畢業生的論文獻給我永遠敬愛的恩師 曾錦 煥博士。今能完成博士論文,如沒有 呂東武教授毫不保留給予指導、經費贊助 及關懷鼓勵(當我有放棄念頭),我的博士論文是不可能完成,在此再一次感謝 呂東武博士。 感謝我另一位指導教授 洪景華博士,當『最佳化實驗室』師門失去大家 長曾老師時,洪老師伸出温暖雙手接納頓失依靠的我們,並且協助我們師門完成 學業。世人總是喜歡錦上添花,但洪老師雪中送炭的真心付出,更讓學生滿懷感 激。 感謝論文口試委員明新科技大學機械系蔡忠杓老師、台北醫學大學生理學 科陳祥和老師、交通大學機械系楊秉祥老師及國防大學理工學院機電能源航太工 程學系林聰頴老師撥冗參加學生博士學位考試,並給予學生論文上指正及寶貴的 建議。 我博士論文在實驗部份單靠我一人是不可能完成,所以要非常感謝台大醫 工所『骨科工程暨動作分析實驗室』師門秀真、聖昌、徹菖、昱琦及建今的協助。 而在交大修課期間感謝學弟嘉宏、大師明達、陽光給予我多方面協助,讓我在高 雄也能獲知系上一些訊息。感謝飛統自動化實業有限公司胡正陽經理在本論文製 作實驗設備上的協助。 最後,謹以本論文獻給我最敬愛的父母及二位哥哥,感謝他們在我求學過 程中不時給予關愛及鼓勵。感謝內人佩佩在我攻讀博士期間照顧兩個年幼的女兒 (宛兒與安兒)。
目錄
目錄
目錄
目錄
中文摘要………... 英文摘要……….……....….. 誌謝………... 目錄………....…...… 表目錄……….……….. 圖目錄………...……... 符號說明………...….…... 第一章 第一章 第一章 第一章 緒論緒論緒論緒論………...…. 1.1 動作分析簡介……….. 1.2 步態分析簡介……….. 1.3 測力板………...………... 1.4 類神經網路簡介……….………. 1.5 研究動機………...………... 1.6 測力板文獻回顧………..…… 1.7 人體測計學文獻回顧………...……….... 1.8 研究目的………... 第二章 第二章 第二章 第二章 測力板校正器系統測力板校正器系統………...………….測力板校正器系統測力板校正器系統 2.1 測力板力量力矩擷取與壓力中心計算…………..………… 2.2 測力板校正器設計………...…... 2.3 校正器施力計算………...…….…….. 2.4 I/O 介面卡與控制軟體……….. 2.5 校正器施力準確性評估………...…... 2.6 測力板校正步驟……….………. 2.7 類神經網路校正測力板量測誤差………...…... 2.7.1 類神經網路之拓樸構造………..… 2.7.2 類神經網路學習參數……….. 第三章 第三章 第三章 第三章 測力板靜態校正測力板靜態校正………測力板靜態校正測力板靜態校正 3.1 校正器硬體架設………..……… i iii vi vii x xiii xvii 1 1 3 6 7 8 9 10 11 13 13 15 18 19 22 23 26 26 29 30 303.2 靜態力量校正結果……….…. 3.3 靜態力量校正討論……….…………. 3.4 靜態壓力中心校正結果……….. 3.5 靜態壓力中心校正討論……….……….… 3.6 類神經網路應用討論……….…. 3.7 GRF 與 COP 對關節受力的影響……….… 第四章 第四章 第四章 第四章 測力板動態校正測力板動態校正測力板動態校正………...…測力板動態校正 4.1 已知動態施力下之力量校正………..……… 4.2 已知動態施力下之壓力中心校正……… 4.3 未知動態施力下之壓力中心校正………... 第五章 第五章 第五章 第五章 測力跑步機之校正測力跑步機之校正測力跑步機之校正測力跑步機之校正………..………...……… 5.1 測力跑步機的重要性………..… 5.2 測力跑步機設計………...…………... 5.3 測力跑步機量測力量與壓力中心計算……….……. 5.4 靜態校正與驗證實驗步驟……….. 5.5 靜態力量校正………..……….... 5-6 壓力中心校正………...………....……...… 5-7 力量與壓力中心驗證………..…. 第六章 第六章 第六章 第六章 人體測計學資料之建立人體測計學資料之建立人體測計學資料之建立………...……….…….人體測計學資料之建立 6.1 建立三維人體數學模型………..… 6.2 實驗材料與方法……….…. 6.3 應用最佳化方法求出人體各肢段之質量……….. 6.4 人體測計學資料建立與準確性之評估……….. 6.4.1 個人化人體測計學資料建立與準確性之評估……... 6.4.2 成人人體測計學資料建立與準確性之評估………... 6.4.3 兒童人體測計學資料建立與準確性之評估……..…. 31 39 40 44 45 48 50 50 54 55 63 63 64 67 69 70 72 75 79 79 81 83 85 85 91 94
7.1 結論………...…….. 7.2 未來展望………..… 參考文獻 參考文獻 參考文獻 參考文獻……….………...…... 100 101 102
表目錄
表目錄
表目錄
表目錄
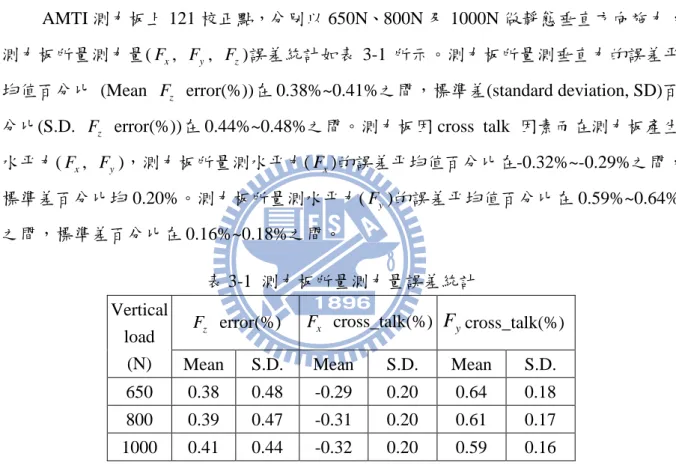
表 3-1 測力板量測力量誤差統計……….………..……. 表 3-2 運用類神經網路修正器將測力板量測力量大小誤差作修正補償…... 表 3-3 測力板所量測壓力中心誤差統計……….... 表 3-4 運用類神經網路修正器將測力板量測壓力中心誤差作修正補償…… 表 3-5 以 650N 及 1000N 為類神經網路學習資料其測力板量測 GRF 與 COP 誤差統計………..………...……….………..…… 表 3-6 測力板上 100 個檢驗點校正前力量與壓力中心之誤差統計…………. 表 3-7 測力板上 100 個檢驗點校正後力量與壓力中心之誤差統計…………. 表 3-8 測力板在校正前後所量測力量與壓力中心之數值……….... 表 3-9 測力板校正前後其人體踝關節、膝關節及髖關節所承受力矩大小比 較………...……… 表 4-1 測力板在已知動態遞增施力負載下,其力量實際值與量測值之比較.. 表 4-2 測力板在已知動態遞減施力負載下,其力量實際值與量測值之比較.. 表 4-3 測力板在已知動態遞增施力負載下,其力量校正後之比較……...…. 表 4-4 測力板在已知動態遞減施力負載下,其力量校正後之比較………..… 表 4-5 測力板在已知動態施力負載下,其力量經濾波及曲線擬合後之誤差.. 表 4-6 測力板在已知動態遞增施力負載下,其壓力中心誤差之比較……….. 表 4-7 測力板在已知動態遞減施力負載下,其壓力中心誤差之比較……….. 表 4-8 測力板在已知動態遞增施力負載下,其壓力中心校正後之比較…….. 表 4-9 測力板在已知動態遞減施力負載下,其壓力中心校正後之比較…..… 表 4-10 測力板在未知動態施力負載下,其壓力中心誤差之比較………....… 表 4-11 測力板在未知動態施力負載下,其壓力中心校正後之比較………… 表 4-12 校正器以不同動態施力速度作用於測力板其 COP 標準差之比較….. 表 4-13 測力板在未知動態施力負載下,在施力開始到達測力板垂直負載第 一高峰點前,其測力板垂直負載在 325N 以上所量測的壓力中心誤.. 表 4-14 測力板在未知動態施力負載下,從測力板垂直負載最後一個高峰點 到施力結束前期間,其測力板垂直負載在 350N 以上所量測的壓力 31 32 40 41 45 46 47 48 49 51 51 52 52 53 54 54 55 55 56 60 61 61表 5-1 測力跑步機量測力量誤差統計………..……….. 表 5-2 測力跑步機量測力量經校正後之誤差統計………...…………. 表 5-3 測力跑步機量測壓力中心誤差統計…... 表 5-4 測力跑步機量測壓力中心經校正後之誤差統計……….…... 表 5-5 測力跑步機量測力量與壓力中心誤差統計………...…………. 表 5-6 測力跑步機量測力量與壓力中心經校正後之誤差統計……….... 表 6-1 各肢段對應反光標記位置與計算體積所需幾何參數………...………. 表 6-2 本研究方法個人化各肢段密度與文獻人體測計學之比較……… 表 6-3 本研究方法與文獻人體測計學資料在個人化各種姿勢下其人體質心 位置計算值與量測值之誤差比較……….……….. 表 6-4 個人化人體測計學靜態動作之準確性評估……… 表 6-5 個人化人體測計學動態動作之準確性評估………..….. 表 6-6 12 位成人各肢段佔全身體重百分比(%)之平均值(標準差) 與文獻資 料之比較………...………. 表 6-7 12 位成人各肢段質心位置(%)之平均值(標準差)與文獻資料之比較... 表 6-8 12 位成人各肢段旋轉半徑之平均值(標準差)與文獻資料之比較…..… 表 6-9 12 位成人受試者作靜態動作準確性評估,人體質心位置計算值與量 測值之平均誤差(標準)……...…...……… 表 6-10 12 位成人人體測計學動態動作之準確性評估………... 表 6-11 20 位兒童各肢段佔全身體重百分比(%)之平均值(標準差) 與文獻資 料之比較………..……….……….... 表 6-12 20 位兒童各肢段質心位置(%)之平均值(標準差)與文獻資料之比較.. 表 6-13 20 位兒童各肢段旋轉半徑之平均值(標準差)與文獻人體測計學資料 之比較. …………..……….………..… 表 6-14 20 位兒童受試者作靜態動作準確性評估,人體質心位置計算值與量 測值之平均誤差(標準差)………....……… 表 6-15 20 位兒童人體測計學動態動作之準確性評估………..………… 表 6-16 人體靜態站立時在不同的人體測計學資料下比較下肢關節受力差 異………... 70 71 73 73 76 76 81 87 88 89 89 92 92 92 93 94 95 95 95 96 97 98
表 6-17 人體作屈膝下彎動作時在不同的人體測計學資料下比較下肢關節
圖目錄
圖目錄
圖目錄
圖目錄
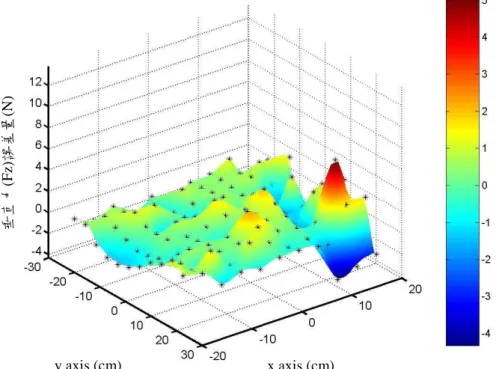
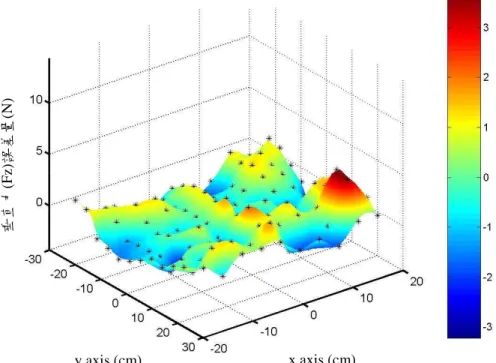
圖 1-1 評估人類動作的三步驟,測量與描述、分析以及評估[4]……... 圖 1-2 利用地面反作用力來評估正常與異常步態之間的差異[4]...…... 圖 1-3 步態週期時間示意圖[20]………...……….… 圖 1-4 三度空間步態分析攝影機[20]………...……….… 圖 1-5 地板反作用力與張闊肌膜肌(tensor fascia latae)之肌電圖關係……… 圖 1-6 測力板(Craik and Oatis ,1995)………...……… 圖 1-7 步行中的測力板量測資料[20]………..…………..… 圖 2-1 測力板校正器系統整體示意圖………...… 圖 2-2 測力板之尺寸 (一)……….. 圖 2-3 外力F v 作用在距離測力板原點P v 的位置………... 圖 2-4 校正器結構示意圖(一)……….…………...…………. 圖 2-5 校正器結構示意圖(二)………..…..…… 圖 2-6 測力板校正器實體照片圖………... 圖 2-7 校正器組成元件………...…….… 圖 2-8 校正器座標系統………...……… 圖 2-9 校正器施力計算符號說明………..………... 圖 2-10 校正器 I/O 介面運動卡……….. 圖 2-11 測力板力量擷取 A/D 介面卡………..… 圖 2-12 校正器控制人機介面………..…… 圖 2-13 測力板力量力矩擷取人機介面………..……… 圖 2-14 標準砝碼……..………...…… 圖 2-15 測力板校正點與檢驗點示意圖………...…...… 圖 2-16 校正器固定平台安裝方式……….…… 圖 2-17 神經元構造圖………..… 圖 2-18 二層回饋式類神經網路示意圖……….… 圖 3-1 校正器至針對實驗室測力板作現地校正………...……. 圖 3-2 測力板各校正點在垂直力(F ) 650N 施力下之力量誤差………….…z 圖 3-3 測力板各校正點在垂直力(F ) 650N 施力下校正後之力量誤差…….z 2 2 4 5 5 6 7 13 14 14 15 16 16 17 18 19 20 20 21 21 23 24 24 27 28 30 32 33圖 3-4 測力板各校正點在垂直力(Fz) 800N 施力下之力量誤差………... 圖 3-5 測力板各校正點在垂直力(Fz) 800N 施力下校正後之力量誤差…..… 圖 3-6 力板各校正點在垂直力(Fz) 1000N 施力下之力量誤差………... 圖 3-7 力板各校正點在垂直力(Fz) 1000N 施力下校正後之力量誤差…... 圖 3-8 測力板各校正點在垂直力(F ) 650N 施力下之水平力(z Fx)力量誤差.. 圖 3-9 測力板各校正點在垂直力(F ) 800N 施力下之水平力(z Fx)力量誤差.. 圖 3-10 測力板各校正點在垂直力(F ) 1000N 施力下之水平力(z Fx)力量誤.. 圖 3-11 測力板各校正點在垂直力(F ) 650N 施力下之水平力(z Fy)力量誤差 圖 3-12 測力板各校正點在垂直力(F ) 800N 施力下之水平力(z Fy)力量誤差 圖 3-13 測力板各校正點在垂直力(F ) 1000N 施力下之水平力(z Fy)力量誤 差………... 圖 3-14 測力板各校正點在垂直力(F ) 650N 施力下之 COP 誤差向量…….z 圖 3-15 測力板各校正點在垂直力(F ) 650N 施力下經校正後之 COP 誤差z 向量……... 圖 3-16 測力板各校正點在垂直力(F ) 800N 施力下之 COP 誤差向量….…z 圖 3-17 測力板各校正點在垂直力(F ) 800N 施力下經校正後之 COP 誤差z 向量……... 圖 3-18 測力板各校正點在垂直力(F ) 1000N 施力下之 COP 誤差向量……z 圖 3-19 測力板各校正點在垂直力(F ) 1000N 施力下經校正後之 COP 誤差z 向量……... 圖 4-1 砝碼座以 25.0 cm/sec 速度移動來遞減測力板負載………....… 圖 4-2 砝碼座以 25.0 cm/sec 速度移動來遞增測力板負載………... 圖 4-3 砝碼座以 7.5 cm/sec 速度移動來遞增測力板負載………. 圖 4-4、砝碼座以 7.5 cm/sec 速度移動來遞減測力板負載………. 圖 4-5 測力板在重負載下所量測力量……… 圖 4-6 測力板在重負載下之壓力中心 X 軸座標誤差量……… 圖 4-7 測力板在重負載下之壓力中心 Y 軸座標誤差量……… 圖 4-8 測力板在中負載下所量測力量……… 33 34 34 35 36 36 37 37 38 38 .41 42 .42 43 43 44 51 51 53 53 57 57 57
圖 4-10 測力板在中負載下之壓力中心 Y 軸座標誤差量……….. 圖 4-11 測力板在輊負載下所量測力量………. 圖 4-12 測力板在輕負載下之壓力中心 X 軸座標誤差量………..… 圖 4-13 測力板在輕負載下之壓力中心 Y 軸座標誤差量……….… 圖 5-1 測力跑步機整體設計示意圖………. 圖 5-2 跑步機機構分解示意圖……… 圖 5-3 測力跑步機的各部元件名稱………. 圖 5-4 測力跑步機實體照片……… 圖 5-5 測力跑步機座標系統定義……… 圖 5-6 受試者踏在測力跑步機跑帶示意圖………. 圖 5-7 測力跑步機校正器之架設……… 圖 5-8 測力跑步機各校正點在垂直力(Fz) 140Kgw 施力下之力量誤差……. 圖 5-9 測力跑步機各校正點在垂直力(Fz) 140Kgw 施力下校正後之力量誤 差………... 圖 5-10 測力跑步機在 140Kgw 垂直負載下其各校正點 COP 誤差向量…… 圖 5-11 測力跑步機在 140Kgw 垂直負載下其各校正點 COP 校正後之誤差 向量………... 圖 5-12 測力跑步機各校正點在驗證負載 115Kgw 施力下之力量誤差…… 圖 5-13 測力跑步機各校正點在驗證負載 115Kgw 施力下校正後之力量誤差 圖 5-14 測力跑步機在驗證負載 115Kgw 作用下其各校正點 COP 誤差向量 圖 5-15 測力跑步機在驗證負載 115Kgw 作用下其各校正點 COP 校正後之 誤差向量………...………..……… 圖 6-1 人體十六連桿………...……… 圖 6-2 受試者貼反光標記之正視圖(a)、(b)與背視圖(c)………..… 圖 6-3 在靜態量測受測者在軀幹前後各加一塊側向滾輪擋塊……..………. 圖 6-4 受試者肩關節屈曲 30 度………..…… 圖 6-5 受試者肩關節外展 90 度………..…… 圖 6-6 髖關節外展 30 度………..… 圖 6-7 髖關節伸展 30 度……….. 58 59 59 59 64 64 65 65 67 67 69 72 72 74 74 77 77 78 78 80 81 83 86 86 86 86
圖 6-8 髖關節屈曲 30 度………..…….……… 圖 6-9 肩關節屈曲 90 度……….…..… 圖 6-10 個人化人體測計學在動態動作過程中 GRF 準確性評估….…………. 圖 6-11 個人化人體測計學在動態動作過程中 COP 準確性評估…………..… 87 87 90 91
符號說明
符號說明
符號說明
符號說明
R:測力板反力(Kgf) Wx:施力桿組重量 Wy:法碼組重量 W:支力臂重量 X:支力臂重心至支力臂旋轉軸距離 Xx:施力桿至支力臂旋轉軸距離 Y:法碼導柱中心至支力臂旋轉軸距離, δ:法碼組之重心偏移量 Load:量測之力量(N)、力矩(N-m) K:轉換常數(25) V:經放大器量測之電壓值 x P :測力板壓力中心相對測力板座標的 X 軸座標 y P :測力板壓力中心相對測力板座標的 Y 軸座標 z P :外力在測力板施力點至測力板座標(x,y)之垂直距離 x F 、Fy、F :由測力板測量元件所測得之外力分量 z x M、My、M:由測力板測得之外力對測力板原點造成的力矩分量 z pv:相對校正器座標系統的位置向量 q R :測力板座標系統與校正器座標系統所對應之座標軸夾角的方向餘弦組成 之旋轉矩陣 q pv :相對於測力板座標系統的位置向量 q ov :測力板座標系統的原點相對於校正器座標系統的位置向量 xF
:施力在 X 軸上之合力 yF
:施力在 Y 軸上之合力 zF
:施力在 Z 軸上之合力 za ya xa F F F , , :力規 a 量測之三軸正向力 zb yb xb F F F , , :力規 b 量測之三軸正向力zc yc xc F F F , , :力規 c 量測之三軸正向力 zd yd xd F F F , , :力規 d 量測之三軸正向力 x ∧ :測力跑步機所量測的壓力中心 X 軸座標 y ∧ :測力跑步機所量測的壓力中心 Y 軸座標 A:指力規 a 中心點沿著 x 軸方向至力規 b 中心點之距離一半 B:指力規 b 中心點沿著 y 軸方向至力規 c 中心點之距離一半 Z:指施力平面與力規平面座標之距離 R F v :受測者對測力板之施力。 R M v :受測者對測力板原點之力矩。 P v :受測者對測力板施力作用點的位置向量。 M :受測者質量。 gv :重力加速度。 i m :受測者第 i 肢段之質量。 i av :受測者第 i 肢段之加速度。 c rv :測力板原點至受測者質心位置向量。 i rv:受測者質心至第 i 肢段質心之位置向量。 i I :受測者第 i 肢段之質心慣性矩。 i αv :受測者第 i 肢段之質心角加速度。 j pv : 在第 j 個動作下測力板測得受測者壓力中心位置向量 j qv : 在第 j 個動作下受測者整體質心位置向量 ' j qv : 在第 j 個動作下受測者整體質心位置在垂直測力板投影點的位置向量 i d :第 i 個肢段密度 i V :第 i 個肢段體積 i j qv : 在第 j 個動作下第 i 個肢段的質心位置向量
第一章
第一章
第一章
第一章 緒論
緒論
緒論
緒論
1.1 動作分析簡介
動作分析簡介
動作分析簡介
動作分析簡介
人體做任何動作時是由神經來下達指令,再經由肌肉的收縮來帶動骨骼繞著關節來 旋轉,最後綜合各骨骼作動的結果以達到人體欲完成的動作目的。而人體在整個動作過 程當中,其人體內的神經、骨骼、肌肉及關節韌帶是須經高度的配合與協調才能完成, 但如其中有一環節出現問題,這會影響人體動作功能的表現。所以,人體動作分析 (movement analysis)的目的是探討人體內神經骨骼肌肉系統的作用原理,並將動作分析 的結果應用於正常人與病患在動作力學行為差異性的比較。 而動作分析的結果常以關節受力情形來加以評估,所以瞭解人體在運動的過程中其 肌肉收縮的力量大小是有必要的,但目前除了在人工關節上裝有侵入式量測裝置來測量 關節受力的特殊情況外[1~3],仍然無法以現有非侵入式的儀器設備直接測得人體肌肉收 縮力量及關節受力情形。因此,目前研究動作分析學者如何運用現有量測設備與生物力 學知識理論來精準計算人體關節受力仍是一大課題。 目前最常使用的動作分析方法是藉由人體在運動過程中量測地面之反作用力(ground reaction force, GRF)、壓力中心(center of pressure, COP) 及人體各肢段間相對運
動情形,再以人體結構模型並結合運動學(kinematics)與力動學(kinetics)等力學知識背景 而計算出關節所承受之作用力等資料,最後再使用記錄肌肉收縮時產生的肌電訊號之肌 電圖(electromyogram, EMG),以進一步瞭解人體運動時各肌群(muscle group)收縮作 用的情況。 人體動作分析的流程一般分為三大步驟如圖 1-1 所示[4]。第一個步驟是對人體運動 的觀察、量測、描述及監測變化。而為了提高測量數據的客觀性,一般可利用精準的量 測設備來進行定量測量,其觀察或量測之數據也必須經由數字或文字而描述記錄下來。 第二個步驟是針對測量後所記錄之數據加以進行分析。分析是以數學的運算將一組或各 種不同來源的資料整合再以動作分析者欲得數據形式呈現。而一般比較複雜的動作分析 則會建立人體肢段模型並配合人體測計學(anthropometry)、運動學、力動學等資料而 來進行生物力學分析。第三個步驟是針對評估分析後的結果給予合理的解釋與診斷。一
般診斷人體動作是否正常或異常的評估,最常採用的方法是首先建立正常人動作分析的 數據資料庫,再將欲評估之受試者以同樣動作分析而得之數據來加以相互比對如圖 1-2 所示[4]。當然,人體動作分析其病因診斷要更為正確,則必須配合人體動作測量技術的 發展與生物力學、解剖學、生理學等專業知識的建立才能達成。 Measur e Describe Analyze Previous Patient data Describe Monitor Analyze dragnose Data On normals Monitor Analyze dragnose Analysis On normals Data Dragnose Previous Patient analysis Data Assessment 圖 1-1 評估人類動作的三步驟,測量與描述、分析以及評估[4] 圖 1-2 利用地面反作用力來評估正常與異常步態之間的差異[4] body weight 100% normal Time V er ti ca l R ea ct io n F o rc e pathological
1.2 步態分析簡介
步態分析簡介
步態分析簡介
步態分析簡介
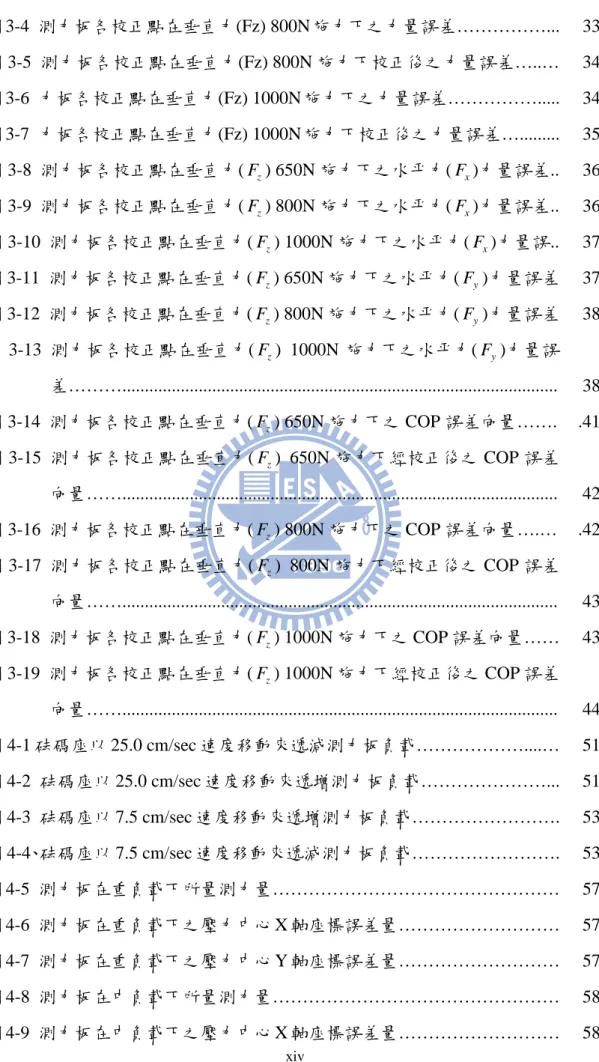
走路是人日常生活中最頻繁的動作之一,從走路步態的變化中,可以發現許多在臨 床上有意義的資訊,來提供醫師或復健師對病情研判。所以步態分析(gait analysis)是以 定量研究方法來探討人體步行時,人體各肢段與關節間的運動學與力動學關係。藉由步 態週期(gait cycle)中獲得之足部所受地面之反作用力、壓力中心、各肢段間相對運動情 形,與關節所承受之作用力等資料,來評估正常人與病患間在力學行為上的差異,進而 與人工植入物、輔具設備等醫療技術相配合。目前步態分析應用已非常廣泛,例如在骨 科疾病治療前後的偵測及評估[5][6];在神經學上,它可以用來測量特殊肢體活動、抓 握能力及特殊步態來分析神經病變病患的特性及治療效果的追蹤[7~11];在復健上,它 可以作為治療診斷、治療評估及恢復狀態衡量的參考[12~15];在義肢裝具上,可作為協 助設計、測試及義肢或輔具適應情形的輔助[16~19]。 由於每一個人的動作有快慢之分,所以在步態分析中會以每一個人在每一次的動作 中化為百分比來加以描述。所以步態週期為步態分析中將動作定成一個週期來探討。依 1992 年 Perry[20]定義一個步態週期可劃分成兩大部分,分別是站立期(stance phase) 與擺盪期(swing phase),如圖 1-3 所示[20]。所以透過正常人與病患等受試者在步態 週期進行中針對每個步態時期的功能做探討,其中可以很容易發現相異之處。例如腦性 麻痺的病患在觸地初期就經常無法以腳跟觸地,而在每個步態分期過程中關節角度變化 也不一樣[21]。因此正常人與病患經由步態分析結果的比較,是很容易發現相異之處, 進而可作為病情診斷以及治療的規劃與評估之依據。圖 1-3 步態週期時間示意圖[20]
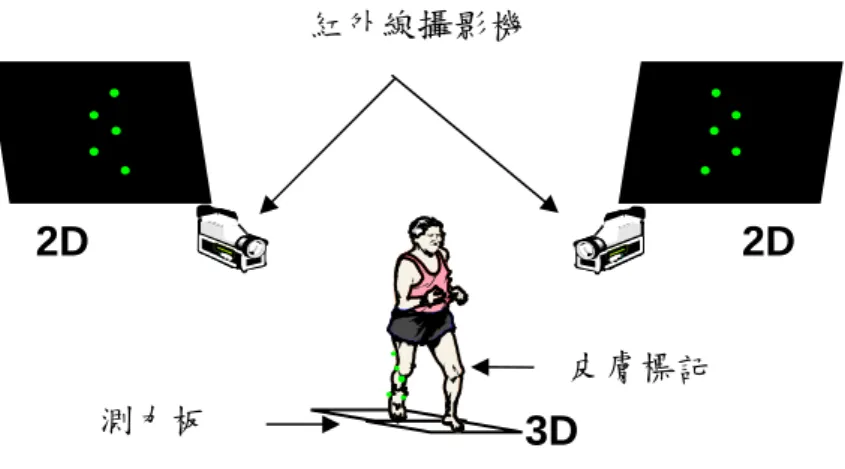
為了計算步態分析中人體關節所承受之作用力,目前研究常透過紅外線攝影機
(infrared video camera)、測力板(force plate)及肌電圖儀等儀器設備而取得計算關節所承
受之作用力的相關資料。紅外線攝影機是捕捉貼在人體皮膚上紅外線感光球標記 (markers)在空間中的位置,而每一顆皮膚標記必須至少有兩台紅外線攝影機同時捕捉到 空間的位置,才能準確定出每一顆皮膚標記的三維座標位置,如圖 1-4 所示[20]。測力 板則是提供人體步態分析中足部踏在地面反作用力及壓力中心的資訊 如圖 1-4 所示 [20]。肌電圖儀是利用當人體肌肉收縮時所產生之電位差變化來獲知肌群運作情形,有 助於臨床病因的解釋,如圖 1-5 所示。
2D
3D
2D
紅外線攝影機 測力板皮膚標記
皮膚標記 圖 1-4 三度空間步態分析攝影機([20]圖 1-5 地板反作用力與張闊肌膜肌(tensor fascia latae)之肌電圖關係
G ro u n d R ea ct io n F o rc e ( N ) E M G a m p li fi er o u tp u t ( N )
(a) SLS SLS
DLS
1.0 BW
0.5 BW
Time (sec)
(b)
0 2
4 6
1000 800 600 400 200 0 1 0 -11.3 測力板
測力板
測力板
測力板
由於目前尚無儀器設備可直接量測人體肌肉作用時的力量大小,因此想要瞭解人體 運動時肌力大小與作用方式則必須透過作用於人體上的外力來進行推算分析。因此測力 板是目前在步態分析實驗中量測足部的地面反作用力及壓力中心最常使用儀器設備如 圖 1-6 所示。
圖 1-6 測力板(Craik and Oatis ,1995)
一般進行步態分析實驗時,都會要求受試者雙腳必須各踩在一塊測力板上而走過測 力板。當足部施力於測力板表面上時,測力板下的各處感測器會量測各方向所受之力 量,再經數學式子計算出雙腳分別所受地面反作用力及壓力中心,研究者再透過各肢段 間相對運動情形及逆向動力學(inverse dynamics)與人體力學模型進而計算出人體肢段與 關節受力大小。目前市面測力板量測力量感測器有應變計(strain gage)和壓電材料 (piezoelectric material)兩種。 應變計型測力板是藉由應變計本身的變形來反求作用力的大小。而此型測力板需要 有足夠的作用時間讓應變計變形,因此當測力板受到較輕微或較快速的作用力作用時,
些特殊材料具有變形後會造成內部電流量改變的特性,透過所測得之電流改變量來反推 壓電材料所受的作用力。而此型測力板施於壓電材料上的作用力不能持續太久,因壓電 材料產生之電流量將會隨時間而減小,而影響量測力量的準確性。 一般人體在作臨床動作分析時,其足部作用於測力板作用力速度是不會太快且也不 會持續作用於測力板上,因此 AMTI 所生產應變計型測力板與 Kistler 所生產壓電材料型 測力板在臨床動作分析上均可使用。圖 1-7 為步態分析實驗中,測力板所測得之地面反 作用力資料。另外,測力板為了降低測量上誤差,在測力板的結構上以材質堅硬且重量 重來設計,以提高測力板的剛性(stiffness)[22] 及自然頻率。 圖 1-7 步行中測力板所量測之地面反作用力資料[20]
1.4 類神經網路簡介
類神經網路簡介
類神經網路簡介
類神經網路簡介
近十年來,由於電腦的計算能力大幅增加,使得人工智慧科學突飛猛進,其中藉由 模仿人類細胞學習特性的人工智慧(artificial intelligence)網路,類神經網路(artifical neuralnetwork)正受到熱烈的討論與歡迎重視。類神經網路具備有辨別、分類、學習等功能,
且因類神經網路的特殊架構,所以常應用於處理非線性系統鑑別和控制問題上,而且有 很好的表現[23~27]。
由於倒傳式類神經網路(backpropagation neural network)的學習效果較其他學習類 神經網路為佳,所以在人工智慧與訊號處理中已被廣泛使用[28~30]。至於傳統的回饋式 類神經網路由於其學習效果過於緩慢,使得在學習過程往往需要耗費許多時間,才能達 到學習效果[31]。一般影響學習速度之學習參數有神經網路的種類、神經網路的層數、 神經元(neuron)個數、學習速率(learning rate)、動量(momentum)、轉移函數(transform function)、權衡值的初始值的範圍,及有無正規化選擇和正規化範圍(minMax table)設 定,所以如何提供一組最佳學習參數組合,而讓毫無經驗的使用者,不必花費很多時間 去揣摩這些學習參數的組合及設定值,可說是當務之急。
1.5 研究動機
研究動機
研究動機
研究動機
步態分析己被廣泛運用於神經骨骼肌肉系統疾病之診斷以及治療的規劃與評估,更 是各式骨科植入物、矯具、輔具以及復健器材之研發極為重要的依據與工具。步態分析 主要利用運動學與測力板資料而間接求得人體各肢段關節所承受之力量、力矩大小。因 此,測力板所量測作用力數據是否精準及作用點計算出的位置是否有所偏誤,對於步態 分析之研究結果有極大的影響[32]。一般測力板固定於地面以避免測力板受力時因產生 振動而造成量測數據錯誤。測力板出廠前會由製造廠商完成校正後才交由使用者使用。 而一般力規( load cell)每經一段時間均須作校正,測力板上的力規感測器也不例外。因 此,發展適合在實驗室針對固定的測力板是否準確性的校正器是極為必要。 另外,為了精確計算人體各肢段關節所承受之力量與力矩大小,其正確人體模型建 立是必需的[33]。而模型的建立是需要人體各肢段之質量、質心及轉動慣量等參數,而 這些資料是須由人體測計學的方法量測與計算所提供。因此,1996 年 Kingma[34]指出 除了改進實驗器具的精確性可降低實驗誤差,更應該注意人體測計學輸入的資料正確 性,因有時人體測計學資料造成的誤差會大於實驗器具量測之誤差,所以在提供人體力實務與研究所需之人體測計學資料多數來自於成人之研究[35~39],僅有極少部份研究提 供了 0~2 歲幼兒資料 [40],而 6~12 歲兒童的人體測計學資料則完全付之闕如。即使動 作異常如腦性麻痺之兒童(多為 6~12 歲)一直是臨床步態分析之大宗,目前各商業步 態分析系統及國內外步態分析實驗室均以成人廻歸資料(如 Dempster’s Coefficients)外 插而得數學模型所需之輸入參數。此作法主要是因為缺乏 6~12 歲兒童資料,因為不論 是利用屍體或侵入性的方法在道德上均不適合兒童,而少數非侵入性方法則因操作不 易、設備取得困難、成本過高等因素無法適用於例行臨床步態分析實務與研究。因此急 需發展一套可個人化且非侵入性、快速、低成本、準確且適合各種體型、性別及年齡的 活體量測資料之測量方法,並用以建立成人與 6~12 歲兒童人體測計學資料庫,包括各 肢段質量、質量中心及轉動慣量等資料,以提供臨床步態及動作分析之需。
1.6 測力板文獻回顧
測力板文獻回顧
測力板文獻回顧
測力板文獻回顧
目前已有多位學者積極研究發展適合在實驗室現地(in situ)直接校正測力板準確性 的校正設備[41~44]。1997 年 Gill[43] 等人設計一台對實驗室建築物無侵入式破壞的測 力板校正器,以槓桿原理產生靜態垂直力並施以測力板(AMTI)校正點(121 點)上,比較 壓力中心實際值、量測值及力量實際施力值、量測值之差異。但 Gill[43] 等人只做靜態 垂直力施力於測力板測試,無動態測試,對測力板量測誤差沒有提供校正方法,且校正 器重量太重(約重 400Kgw)、體積龐大(1.71×1.54×0.8 m),搬移費力、費時;校正器施力 桿對每一點校正點(121 點)移位採手動控制,因此定位準確性差、移位速度較慢。1996 年 Hall[42]等人設計二台對實驗室建築物有侵入式破壞的測力板(Kistler)校正器,其中一 台作靜態垂直力校正,另一台作靜態水平力校正。測力板經靜態垂直力校正、水平力校 正後而求得校正矩陣(Cross-sensitivity matrices)。 測力板量測之力量、力矩經校正矩陣 修正後可得較準確力量量測值及壓力中心位置。Hall[42]等人只做靜態垂直力施力於測 力板測試,無動態測試,校正器架設須破壞實驗室建築物且須注意架設安全問題,所以 架設時間較長;校正器重量太重、體積龐大,搬移費力、費時;校正器結構必須堅固, 以確保施力之穩定性及準確性;校正器在每一校正點作移位時採人力控制,因此定位準 確性差、移位速度較慢;校正矩陣是由局部校正點求得,因測力板量測力量及壓力中心 位置與對測力板施力點位置有相當大的關係[41][43],所以求出校正矩陣適用範圍受到 限制。1990 年 Bobbert[41] 等人設計一台對實驗室建築物無侵入式破壞的測力板(Kistler)校正器。對測力板施以靜、動態垂直力,探討壓力中心量測值、實際值差異。靜態壓力 中心校正點共 117 點,靜態壓力中心校正方法採多項式方程式。動態壓力中心校正點共 2 點,以大、小幅度動態垂直力施力於測力板,發現測力板在受力在 1000N 以上時壓力 中心較穩定,而當測力板受力未段且在 500N 以下時壓力中心較不穩定。Bobbert[41] 等 人只做靜、動態垂直力於測力板壓力中心測試,無測力板量測力量校正;校正器在每一 校正點作移位時採手動控制,因此定位準確性差、移位速度較慢。 由以上數位學者研究結果可發現發展適合在實驗室針對測力板是否準確性的校正 器是有所必要的。但這些校正器裝置 Bobbert[41] 等人只能做靜態、動態量測壓力中心 測試校正,Hall[42]等人、Gill[43] 等人只能做靜態量測力量、壓力中心測試校正,且這 些校正器裝置有架設、操控、定位準確、搬移及校正花費時間等問題。
1.7 人體測計學文獻回顧
人體測計學文獻回顧
人體測計學文獻回顧
人體測計學文獻回顧
由於東、西方人之體型相差甚大,所以在各國研究學者針對自己國人所做之人體測 計資料,包括人體各肢體之質量、質量中心及轉動慣量等資料也不盡相同[35][36][45]。 而引用國內外人體測計學資料文獻時,須特別注意人體體型、性別及年齡等差異所造成 之誤差,尤其是在文獻研究範圍以外的人所預估之人體作量測學資料[46]。目前西方人 人體測計學資料大部分都由屍體直接量取[36][37][47]。此量測方法因屍體取得不易,所 以運用於 6~12 歲兒童量測,一般較不能接受。而 2000 年 Cheng[35] 等人利用核磁共振 影像(magnetic resonance imaging, MRI)技術掃瞄人體各肢體斷層之幾何組織,藉由文獻 中已知之骨骼、肌肉、內臟及血管等密度,經重疊、累積計算出人體各肢體之質量、質 量中心及轉動慣量。而此量測方法可個人化量測人體測計資料,但成本較高、量測時間 較久。1980 年 Hatze[48]將成年人人體分成十七段肢體,建立人體測計學資料之數學模 型,並由人體直接量測數學模型之幾何輸入參數。由於 Hatze[48]所發展人體測計學資料 之數學模型,主要的對象是成年人,因此 1992 年 Schneider[40]等人對此數學模型稍作 修正,以量測 0~2 歲幼兒人體測計學資料,並以最佳化方法來調整各肢體之密度,使得 修正後之 Hatze 數學模式計算值與實際體重誤差為最小值。而此量測方法對於相同類型 體型之人體,可快速運用內插法來量測,但對於數學模型以外之體型、年齡及性別,其測計學資料是不可行。1994 年鄭誠功[49]等人建立人體二維動態八連桿生物力學模型, 並利用影像運動分析系統及測力板等設備,以人體各肢體之質量比例、重心位置距離遠 端佔長度的百分比及轉動慣量為最佳化方法之設計變數,並以生物力學模型計算得腳底 的受力與合力位置,和測力板所測量之腳底反力與合力位置的誤差最小為目標函數。此 研究方法,準確計算出人體各肢體之質量比例及在矢狀面(sagittal plane)之重心位置和轉 動慣量。其受測者量測平均結果與西方從屍體量測值資料只有 4%左右之差。惟人體運 動除於矢狀面外,常包括冠狀面(coronal plane)及橫斷面(transverse plane)之動作分量,是 以有考慮三維分析之必要。1995 年 Kingma[50]等人提出當人體四肢保持垂直於測力板 位置時,軀幹以三種不同的角度彎曲之站姿下,利用最佳化方法在測力板壓力中心與人 體質量中心垂直投影測力板位置之誤差最小為目標函數,求得人體軀幹之質量中心位 置。並以測力板反力對人體質量中心做力矩與人體角動量之變化是否一致,作為軀幹質 量中心位置之驗證。此研究方法可依個人之體型、性別及年齡來建立個人化之人體測計 資料,並且以人體動態方式作準確性之評估。但此研究方法是假設人體四肢肢段在不變 的質量、質量中心情形下,以軀幹肢段質心位置為最佳化方法之設計變數,而來決定人 體質心位置。雖軀幹肢段質心位置的決定影響人體質心位置甚大,如四肢肢段也能精準 計算出各肢段之質量及質心,相信對於臨床步態分析定能提供更精準的人體測計資料。 由以上文獻研究方法可知,目前如何建立一套可個人化且非侵入性、快速、低成本、準 確且適合各種體型、性別及年齡的活體測計學資料(in vivo anthropometric data)測量方 法,並用以建立成人與 6~12 歲兒童人體測計學資料庫,包括各肢段質量、質量中心及 轉動慣量等資料,是目前臨床步態分析極重要且迫切的研究課題。
1.8 研究目的
研究目的
研究目的
研究目的
本研究目的一是設計、製作一台可對固定式測力板量測力量及壓力中心作靜態、動 態校正且具有操作容易、省力、省時、輕量化、精準高、攜帶性方便、架設容易、對實 驗室建築物無侵入式破壞等特性的新型測力板校正器,並且利用類神經網路針對非線性 系統具有良好的學習適應性之特性,可將測力板量測力量及壓力中心做修正補償。並應 用本研究測力板校正器對自行研製測力跑步機作校正,以提供需要作長時間、長距離且 連續重複動作的步態分析之用。本研究目的二是發展一套個人化且非侵入性、快速、低成本、準確且適合各種體型、 性別及年齡的活體測計學資料測量方法。利用動作追蹤系統量測各肢段之空間位置及測 力板量測力量與壓力中心,再運用最佳化方法來建立個人化人體測計學資料,以建立我 國成人及 6~12 歲兒童人體測計學資料庫,包括各肢段質量、質量中心及轉動慣量等資 料,以供臨床步態及動作分析之需。
第二章
第二章
第二章
第二章 測力板校正器系統
測力板校正器系統
測力板校正器系統
測力板校正器系統
本論文測力板校正器系統包含校正器、測力板、I/O 介面及 PC-Based 控制器,如 圖 2-1 所示。首先由 PC-Based 控制器下達校正器各運動軸位移、速度指令,經運動卡 (motion Card)及步進馬達驅動器來控制校正器各運動軸步進馬達旋轉。校正器各運動軸 編碼器(encoder)將各運動軸確實位置回傳給 PC-Based 控制器。而測力板所量測到的力 量與力矩經放大器及類比/數位轉換卡(AD Card) 回傳給 PC-Based 控制器。本研究測力 板校正器系統是與台大醫工所博士班陳聖昌共同開發研究。 三組步進馬達 驅動器 6個通道放大器 運動卡 (ADLINK) A/D (NI) 校正器 測力板 擷取測力板 力量、 力矩訊號 驅動校正器 三軸步進馬達 三組編碼器 控制器 個人電腦 圖 2-1 測力板校正器系統整體示意圖2.1 測力板力量力矩擷取與壓力中心計算
測力板力量力矩擷取與壓力中心計算
測力板力量力矩擷取與壓力中心計算
測力板力量力矩擷取與壓力中心計算
測力板力量力矩訊號經放大器放大後輸入電腦,放大器對Fx、Fy、F 及z M 增益Z 值(Gain)設定為 4000,Mx和My擷取增益值設定為 2000,而輸出電壓值均在±10.0V 之 間。其輸出電壓值與量測力量力矩關係如式子(2.1)所示。 Load=K×V (2.1) Load:量測之力量(N)、力矩(N-m) K:轉換常數(力量為 145.602,力矩為 291.204)V:經放大器量測之電壓值,範圍在±10.0V 之間
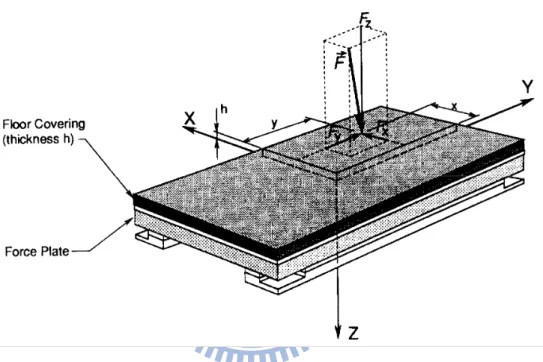
本研究測力板的尺寸規格長 508mm、寬 464mm(Advanced Mechanical Technology
INC., MA. OR6-7-1000),屬於應變計測力板。測力板座標系統定義以測力板中心為原
點,短軸為 X 軸方向、長軸為 Y 軸方向,如圖 2-2 所示。假設一外力F v 作用在距離測 力板原點P v 的位置如圖 2-3 所示,由測力板測量元件所測得之外力分量及外力對測力板 原點造成的力矩分量而求得測力板壓力中心位置,公式如下所示。 圖 2-2 測力板之尺寸 F v
p
v
圖 2-3 外力F v 作用在距離測力板原點P v 的位置 z y x z x F M F P P = − (2.2)z y z x y F F P M P = + (2.3) x P:外力F v 作用點的壓力中心相對測力板座標系統的 X 軸座標 y P :外力F v 作用點的壓力中心相對測力板座標系統的 Y 軸 z P :外力在測力板施力點至測力板座標系統 XY 平面之垂直距離 x F 、Fy、F :由測力板測量元件所測得之外力z F v 的分量 x M、My、M:由測力板測量元件所測得之外力對測力板原點造成的力矩分量 z
2.2 測力板校正器設計
測力板校正器設計
測力板校正器設計
測力板校正器設計
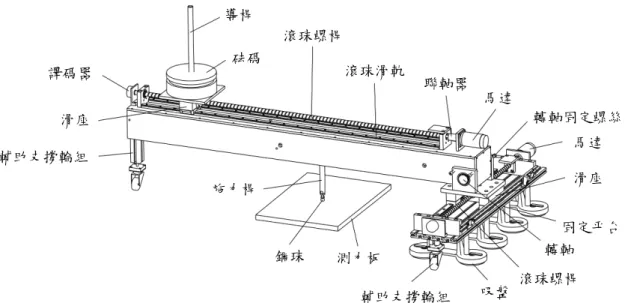
本研究校正器主要由固定平台、一支力臂、一砝碼座及一施力桿組組合而成,如圖 2-4、2-5、2-6 所示。校正器作用力是利用槓桿原理讓砝碼重力經支力臂產生放大作用, 此設計可減輕校正器本體重量。校正器固定於實驗室地板採工業級吸盤吸附方式,所以 校正器安裝快速且對實驗室建築物無侵入式破壞。校正器各運動軸採步進馬達驅動,速 度位置控制採 PC-Bascd 控制器可準確、快速控制施力桿組到達校正點。利用支力臂上 方滾珠螺桿組驅動砝碼座位置來對測力板校正點作靜態、動態之施力。 圖 2-4 校正器結構示意圖(一) 砝碼座 砝碼 支力臂 施力桿組 測力板 固定平台圖 2-5 校正器結構示意圖(二) 圖 2-6 測力板校正器實體照片圖 本研究校正器總重 50Kgw,尺寸長 1.6m、寬 0.88m、高 0.43m,以下針對校正器組 成模組之規格、組件及功能作介紹,如圖 2-4、2-5、2-7 所示: 施力桿組 固定平台 支力臂 砝碼 砝碼座
圖 2-7 校正器組成元件
1. 固定平台規格、組件:採用鋁擠型作為平台主體的固定底板,在固定底板底部安裝
八個吸盤, 吸盤規格(suction lifter, carrying capacity approximate 40Kgw, Bohel,
Germany),吸盤功能是將測力板校正器能快速定位固定於校正現地,且對實驗室建
築物無侵入式破壞。固定底板近二端的輔助支撐輪設計是方便於校正器進行搬移。 而在固定底板上方裝設有一滾珠螺桿組,其功能是移動支力臂,行程為 706mm,該 滾珠螺桿組包括一步進馬達(step motor ,TECD、二相、6V 、1.88A、全步 1.8 度
/1Pulse)、一滾珠導螺桿(ball screws,節距 0.5 cm)、二組線性滑軌(linear guideway)、
滑座(slide table)及一編碼器(encoder, 4000 Pulse/1 rev)。
2. 支力臂規格、組件:其一端以轉軸樞設在該固定平台的滑座(slide table)上,而該
支力臂另一端則裝設有一輔助支撐輪方便於校正器進行搬移,在該支力臂上、下相 對各置設有一滾珠螺桿組,該滾珠螺桿組包括一步進馬達(step motor )、一滾珠導螺 桿(ball screws,節距 0.5 cm)、二組線性滑軌(linear guideway)、滑座(slide table)及 一編碼器(encoder, 4000pluse/1 轉)。支力臂上的滾珠螺桿組功能是移動砝碼座,可移 動行程為 1300mm,支力臂下的滾珠螺桿組功能是移動砝碼座施力桿組,可移動行 程為 550mm。
3. 砝碼座:安裝於支力臂上方滑座上,在砝碼座中央另設有一導柱,該導柱用以輔助
套設砝碼之用。
4. 施力桿組:軸承(ball bearing)、一施力桿(loading bar)及鋼珠。該施力桿一端裝
導桿 砝碼 滾珠螺桿 滾珠滑軌 聯軸器 馬達 轉軸固定螺絲 馬達 滑座 固定平台 轉軸 滾珠螺桿 吸盤 輔助支撐輪組 測力板 鋼珠 施力桿 輔助支撐輪組 滑座 譯碼器
設萬向軸承(universal bearing),且萬向軸承定位於該支力臂的下方滑座。而該施力桿 另一端裝設鋼珠,且鋼珠與施力桿連接的距離可彈性調整以利架設支力臂與測力板 平面保持平行。
2.3 校正器施力計算
校正器施力計算
校正器施力計算
校正器施力計算
首先定義校正器座標系統如圖 2-8 所示,固定平台上滾珠導螺桿軸方向為 X 軸,支 力臂上方滾珠導螺桿軸方向為上 Y 軸,支力臂下方滾珠導螺桿軸方向為下 Y 軸。當校 正器固定平台復歸機械原點時固定平台上滾珠導螺桿軸(即支力臂上旋轉軸)與支力臂上 方滾珠導螺桿軸之交點為校正器座標系統原點。 圖 2-8 校正器座標系統 校正器施力計算首先調整施力桿長度使得支力臂與測力板平面平行,平行度以水平 儀量測。校正器施力於測力板公式如式子(2.4)所示,其中符號說明如圖 2-9 所示。 R= [W×X+ Wx×Xx +Wy× ( Y +δ)]/ Xx (2.4) R:測力板反力(Kgw) Wx:施力桿組重量 1.74Kgw(滑動平台(0.76Kgw)+固定塊(0.37Kgw)+施力桿 (0.61Kgw)) 固定平台 機械原點 X 軸 下丫軸 施力桿 支力臂 上 Y 軸 機械原點 下 Y 軸 機械原點W:支力臂重量(扣除施力桿組重量(1.74Kgw)及砝碼組滑動平台+砝碼平台重
量(2.71Kgw))
X:支力臂重心至支力臂旋轉軸距離
W*X:由線性迴歸(Linear Regression Eqution)求得 1624.5Kgw-cm
Xx:施力桿至支力臂旋轉軸距離,由支力臂下滾珠螺桿組中編碼器取得 Y:砝碼導柱中心至支力臂旋轉軸距離,由支力臂上滾珠螺桿組中編碼器取得 δ:砝碼組重量(滑動平台+砝碼平台+砝碼)之重心偏移量,由線性迴歸 (Linear Regression Eqution)求得-0.238cm 圖 2-9 校正器施力計算符號說明
2.4 I/O 介面卡與控制軟體
介面卡與控制軟體
介面卡與控制軟體
介面卡與控制軟體
校正器 I/O 介面卡採用運動卡(motion card) (ADLINK Technology Inc. , PCI-8134,
Motion Control Card)如圖 2-10 所示,測力板力量擷取採 A/D 卡(National Instruments, PCI-6036E, A/D, Single 16 channel, 16bit, ±10V, 1.25 MS/s 取樣率) 如圖 2-11 所示。
Y Wy Wx R Xx X W
圖 2-10 校正器 I/O 介面運動卡
圖 2-11 測力板力量擷取 A/D 介面卡
校正器各運動軸控制、測力板力量力矩擷取及人機介面程式均以 Visual Basic6.0 程式語 言撰寫如圖 2-12 及、2-13 所示。
圖 2-12 校正器控制人機介面
以下為人機介面畫面功能說明: 校正器控制人機介面功能
1. 校正器三軸運動軸步進馬達位置控制可選擇手動/自動模式及復歸模式。
2. 在不同控制模式均可設定各軸步進馬達的啟動、最高速度。
3. 各軸步進馬達採 S 形速度曲線(S-curve velocity profile)控制,可避免校正器振盪,運
動軸運動較為圓滑快速且定位準確[51][52]。 4. 利用校正器座標系統與測力板座標系統座標轉換,使得校正器座標系統與測力板座 標系統安裝時不一定要平行而能使施力桿可快速、準確到達測力板校正點。所以, 本研究校正器固定平台安裝可以快速定位。以下為座標轉換公式說明: q q q
p
o
R
p
v
=
v
+
v
(2.5) qR
=[xˆ
qyˆ
q](2.6)
p
v
:相對校正器座標系統的位置向量 qR
:測力板座標系統與校正器座標系統轉換矩陣 qp
v
:相對於測力板座標系統的位置向量 qo
v
:測力板座標系統的原點相對於校正器座標系統的位置向量 5. 應用校正器施力於測力板公式,並由已知的預施於測力板力量大小、施力桿位置及 砝碼重量(一般選擇單一個砝碼),進而計算出上 Y 軸砝碼座位置。 6. 具有緊急停止功能。 測力板力量力矩擷取人機介面功能 1. 可選擇單一/連續訊號擷取。 2. 擷取訊號可選擇電壓或力量力矩顯示。 3. 可設定連續訊號擷取時間,並計算出擷取各通道力量力矩訊號平均值及標準差。 4. 可計算出測力板壓力中心位置及與施力桿施力點位置之誤差量。2.5 校正器施力準確性評估
校正器施力準確性評估
校正器施力準確性評估
校正器施力準確性評估
本研究為了確定校正器施力於測力板的準確性,以下為校正器施力準確性之實驗步1. 訂製標準砝碼 1、2、5、10、20Kgw:以黃銅製作圓柱體砝碼,並以德和 ADW-40K 電子桌秤檢測(Resolution,1g),其砝碼重量誤差在±1g 內。
圖 2-14 標準砝碼
2. 以標準砝碼校正測力板:分別將 10、20、30、40、50、60、70、80、90、100Kgw (公
差± 1g)砝碼放在測力板中心處,以 Linear Regression Eqution 修正。式子(2.7)為砝碼 重量(Kgw)與測力板垂直力量測值(N)之關係:
砝碼重量(Kgw)=(測力板量測值(N)+0.0442)/9.7512 (2.7)
3. 以測力板校正校正器:將校正器施力桿移至測力板中心處,砝碼座移至距離支力臂
旋轉軸 100cm 處 ,砝碼座分別放置 5、10、15、20、25、30、35、40Kgw 砝碼,以
Linear Regression Eqution 修正。式子(2.8)為校正器砝碼座距離支力臂旋轉軸 100cm
處,校正器施力於測力板之計算值與砝碼組重量之關係: 校正器施力計算值(Kgw)=35.73602 + 2.0877×砝碼組重量(Kgw) (2.8) 4. 校正器施力準確性評估:砝碼座移至距離支力臂旋轉軸 90、100、110cm 處 ,砝碼 座分別放置 5、10、15、20、25、30、35、40Kgw 砝碼做驗證,其測力板量測值與 校正器施力計算值之誤差平均值 5.2g、標準差 27.57g。
2.6 測力板校正步驟
測力板校正步驟
測力板校正步驟
測力板校正步驟
本研究分別以靜態、動態垂直力施於測力板校正點,並記錄力量力矩、壓力中心之 量測值與實際值。以下為靜態、動態校正實驗步驟: 靜態校正實驗步驟1. 首先將測力板量測力量放大器開機 10 分鐘。 2. 將測力板長、短邊均分 12 等分,其長、短邊等分線交叉點為測力板校正點如圖 2-15 所示,圓點實心為 ANN 學習校正點共 121 點, 三角形空心為 ANN 學習後檢驗點 共 100 點。 406mm 3. 將校正器固定平台移至測力板長邊外側地板後(測力板 X 軸正方向)如圖 2-16 所示, 拆除固定平台兩端輔助支撐輪並按下固定平台吸盤把手,使得校正器固定於測力板 旁之地板上。安裝時校正器座標系統與測力板座標系統不一定要平行。 圖 2-16 校正器固定平台安裝方式 圖 2-15 測力板校正點與檢驗點示意圖
4. 調整支力臂端輔助支撐輪高度使得支力臂與測力板平面保持平行。 5. 操作校正器控制人機介面使得校正器固定平台、支力臂上之滾珠螺桿組作機械原點 動作。 6. 更換施力桿組上之鋼珠為角錐形的指示棒(指示座標功能),並利用校正器固定平台、 支力臂上之編碼器量測出測力板長、短邊三個端點(P1、P2、P3)相對校正器座標系 統之座標,如圖 2.16 所示。 7. 更換施力桿組上之角錐形指示棒為鋼珠後,調整施力桿組高度讓鋼珠與測力板接觸 後再將支力臂端輔助支撐輪拆除,此時須再確認支力臂與測力板平面保持平行。 8. 在校正器控制人機介面輸入相關控制參數,如步進馬達速度設定、測力板欲校正點 點數、施力桿欲移至校正點。 9. 每次更換新的校正點時,測力板須空載,並按下測力板量測力量放大器歸零鈕 (Offest)。 10.力量訊號擷取頻率每一 channel 120 筆/秒,擷取時間 2 秒,對測力板量測之力量、力 矩取平均值(average values) 11.施力桿施力於測力板校正點順序是先從上而下、由左至右。 12.操作校正器控制人機介面使得施力桿快速、準確到達測力板校正點。 13.校正器施力桿在測力板欲校正點分別施力 650N、800N 及 1000N 等垂直力量,並記 錄測力板力量、力矩六軸量測值。 14.為了讓施力桿快速、準確施力於校正點上,砝碼選擇某範圍的整數值(1 ~ 59Kgw), 並操作人機介面使得校正器砝碼座迅速到達施力桿欲產生某力量之位置,而砝碼座 至支力臂旋轉軸之距離範圍在 90cm~110cm。 15.依據測力板力量、力矩六軸量測值計算校正器施力桿壓力中心位置。 動態校正實驗步驟 1. 校正器安裝定位、測力板力量、力矩訊號擷取與靜態校正測試相同。 2. 測力板動態校正點在測力板中心點。 3. 力量訊號擷取頻率每一 channel 1000 筆/秒。 4. 校正器施力桿在校正點施力大小分為已知與未知。 (1) 已知施力大小:施力桿垂直作用於測力板校正點上。透過校正器控制人機介面
使砝碼座從機械原點出發,砝碼座上放置 20Kgw 砝碼,並分別以 7.5cm/sec、 25.0cm/sec 速度來回移動 100cm 來改變施力桿施力大小值。 (2) 未知施力大小:施力桿垂直施力於測力板校正點上,以一位約重 60Kgw 的年輕 男人以一支腳完全承重踏在砝碼座上,另一支腳踏在測力板外的平台上(此平台 高度與砝碼座高度等高),以左、右腳輪流方式分別踏在砝碼座與平台上,共 4 次。透過人機介面使得砝碼座移動不同三個位置,而使得施力桿垂直施力分別 在 800N~1400N、650N~800N 及 450N~650N 之間。由於施力桿施力於測力板的 初、未期階段所量測壓力中心較不穩定[41][[53],所以本研究以施力桿開始施力 到達測力板垂直負載第一高峰點後至最後第一高峰點,作為實際壓力中心與量 測壓力中心誤差平均值與標準差統計。
2.7 類神經網路校正測力板量測誤差
類神經網路校正測力板量測誤差
類神經網路校正測力板量測誤差
類神經網路校正測力板量測誤差
一般測力板出廠前會由製造廠商完成校正後並提供一組校正矩陣作為測力板量測 力量力矩校正之用。由於測力板量測力量及壓力中心位置與對測力板施力點位置有相當 大的關係[41][43],而此校正矩陣一般是由局部校正點求得,所以此校正矩陣適用範圍 也受到限制。所以,本研究欲以類神經網路針對測力板量測力量、壓力中心作全面性校 正。2.7.1 類神經網路之拓樸構造
類神經網路之拓樸構造
類神經網路之拓樸構造
類神經網路之拓樸構造
類神經網路之拓樸構造是以處理單元(processing element)為結點(vertex),以加 權有向邊(weighting directed edge)連接各結點的有向圖(directed graph)。神經元構造一般如圖 2-17 所示[54],圖中 y1,y2、、、yn是神經元接受訊號的來源,各訊號經過 加權神經鍵後匯聚於神經元中,神經元利用其內的轉移函數整合所有輸入訊號後,得到 其輸出值。神經元訊號處理的數學模式為: i j j ij j w y u =
![圖 1-3 步態週期時間示意圖[20]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8386182.178445/24.892.208.758.128.705/圖13步態週期時間示意圖2.webp)