行政院國家科學委員會專題研究計畫 期中進度報告
子計畫二:智慧型生理訊號監控系統(1/3)
計畫類別: 整合型計畫 計畫編號: NSC93-2218-E-009-061- 執行期間: 93 年 10 月 01 日至 94 年 09 月 30 日 執行單位: 國立交通大學電機與控制工程學系(所) 計畫主持人: 楊谷洋 共同主持人: 林進燈 報告類型: 精簡報告 處理方式: 本計畫可公開查詢中 華 民 國 94 年 7 月 26 日
智慧型生理訊號監控系統
Intelligent Physiological Signal Monitoring System
摘
要
隨著生理感測技術及資訊科技的發展,生理感測器越來越輕便也更便宜,這 使得居家生理訊號監控及居家照護成為即將實現的目標。然而為達此目標,除了 生理感測器及生理訊號量測外,迫切需要且不可或缺的是建構一套智慧型生理訊 號監控系統可以自動處理、分析所量測的生理訊號,擷取具代表性的特徵訊號。 本年度我們建立一即時基於肌電波之虛擬義肢控制系統,只擷取一個肌電波的特 徵,以降低運算量,並利用指令轉換的技巧降低一般肌電義肢在控制上的疲勞 感,實現機電訊號控制機器的目標。此外我們亦開發一腦波訊號處理技術,利用 ICA 演算法有效去除腦波訊號中之雜訊成份,並實現於 OMAP 嵌入式系統,達 成生理訊號即時處理的目標。ABSTRACT
Today, advancements in sensor technology and information technology reduce the power consumption of the sensors and make the production cheaper. These trends make it possible to embed sensors in different places or objects at home to measure a wide variety of physiological signals. To achieve the goal of health monitoring or telemedicine in the home, in addition to sensors and measurements, an intelligent physiological signal monitoring system is required. In the first year of this project, we developed a new human-machine interface using the electromyography (EMG). A very simple structure is proposed to realize a real-time EMG-based control system for virtual prosthesis. Only one EMG feature is used such that the computational load can be reduced greatly. The techniques for deriving command from EMG to the machine are also proposed to relieve the user from fatigue. In addition, an electroencephalogram (EEG) artifact removal technique based on independent component analysis (ICA) has been developed and implemented on an OMAP embedded system. According to the experimental results, the proposed physiological signal processing technique can be realized in real-time for various applications.
KEYWORD:Electromyogram (EMG), Electroencephalogram (EEG),
報告內容
隨著生理感測技術及資訊科技的發展,生理感測器越來越輕便也更便宜,這 使得居家生理訊號監控及居家照護成為即將實現的目標。然而為達此目標,除了 生理感測器及生理訊號量測外,迫切需要且不可或缺的是建構一套智慧型生理訊 號監控系統可以自動處理、分析所量測的生理訊號,擷取具代表性的特徵訊號。 本計畫第一年度我們建立一即時基於肌電波之虛擬義肢控制系統,並開發一 腦波訊號處理技術,利用 ICA 演算法有效去除腦波訊號中之雜訊成份,並實現 於 OMAP 嵌入式系統,研究方法與成果詳述如下。一、生理肌電波(EMG)訊號分析與研究
我們建立一即時基於肌電波之虛擬義肢控制系統,只擷取一個肌電波的特 徵,以降低運算量,並利用指令轉換的技巧降低一般肌電義肢在控制上的疲勞 感,實現機電訊號控制機器的目標。 1. 控制系統建立 我們計畫的系統以實現視覺回饋的義肢控制作為初步的目標,希望能找到簡 單的方法得到穩定的肌電波用以推動義肢,往後再逐一增加回授的資訊,如運動 狀態與力資訊等。系統架構如圖 1 所示,首先取得截肢者的肌電波,再透過雜訊 濾除單元濾除肌電波的雜訊,然後擷取肌電波的特徵並轉換為控制指令以控制虛 擬義肢,並透過視覺回饋的方式調整義肢的動作,而我們是以 Microsoft Virtual C++與 OpenGL API 來建構虛擬義肢,如圖 2 所示。 圖 1 基於肌電波之虛擬義肢控制系統架構圖 在系統的建構中,必須了解手部肌肉的功能、找到肌電訊號裡隱藏的雜訊、 萃取適當的特徵、建立肌電訊號與控制指令間轉換規則等;我們首先探討手部前 臂各肌肉的功能,藉以找出最適合的肌肉位置;接著討論 EMG 訊號的雜訊種類, 並使用適當的濾波器將雜訊濾除;然後進行特徵的萃取和 EMG 訊號與控制指令 間的轉換;再以實驗驗證所提系統的成效以及人類適應性等因素對系統正確率的 影響。 2. 肌電波訊號量測 在肌電波訊號量測的工作當中,首先必須選擇適當的肌肉作為肌電波的訊號 來源,確定好量測的肌肉之後,下一個步驟就是進行電極擺設的工作,因為電極 擺設的位置、方向與距離都會影響肌電訊號的量測。 由於我們的焦點是放在手指的伸展與屈曲,所以選定伸指肌的 EMG 訊號作 為判定手指伸展的指示,而手指屈曲的部分則選定屈指淺肌的 EMG 訊號,理由 視覺回饋 肌電波 量測單元 濾除雜 訊單元 特徵萃 取單元 人機介面 指令轉 換單元 虛擬義肢 (a)開啟狀態 (b)關閉狀態 圖 2 所設計之虛擬義肢是屈指深肌是屬於較深層的肌肉,而且我們使用的電極是屬於表面電極,在這種 情況下深層肌肉所量到的 EMG 訊號所包含的雜訊會比較多,因此轉而採用屬於 淺層的屈指淺肌作為判定手指屈曲的依據,但是雖然屈指淺肌擁有比屈指深肌較 多的優勢,但是根據我們實際實驗發現,由於屈指淺肌周圍分佈較多的肌肉群, 且所處的位置比較靠近肌腱附著區(myotendonous junction),所以在找尋屈指淺肌 的位置時必須嚴謹,因為如果位置有所偏差,就會造成 EMG 訊號的不正確;在 台灣大學機械所 Huang 和 Chen 的論文中[2],是使用伸指肌與屈指淺肌作為夾爪 的動作依據,然而事實上除了伸指肌與屈指淺肌的選擇之外,我們發現市面上的 肌電義肢在肌肉的選擇上與我們不同,例如 OTTO BOCK 與德林義肢採用的是 尺 側 屈 腕 肌 (Flexor Carpi Ulnaris) 與 橈 側 伸 腕 長 肌 (Extensor Carpi Radialis Longus),雖然這些肌肉最原始的作用是控制手腕的屈曲與伸展,而不是控制手 指的屈曲與伸展,然而這樣的做法事實上也並無不可,只是操作的直覺性沒那麼 好。 確定好量測的肌肉之後,接下來就是要進行電極擺設的工作,電極依外觀分 為兩種型式:圓形電極跟長條型電極,長條型電極在使用上需注意的事項較多, 例如電極本身的方向必須跟肌肉纖維呈垂直的狀態,而圓形電極則沒有這一方面 的顧慮。無論是長條型電極還是圓型電極都必須遵守一個相同的原則,即兩個電 極的擺放位置必須跟肌肉成平行。兩電極間的擺放距離大約維持在一至兩公分之 間為佳,有些學者認為一公分左右的間距量測訊號的狀況最佳,有的則認為兩公 分才是最恰當的,似乎沒有一定的定論,端看使用的儀器跟量測的肌肉而有所差 異,但是可以確定的是每次量測 EMG 訊號時兩個電極的距離都必須維持一樣的 長度,因為不同的電極間距所量到的訊號是有差異的,唯有維持固定的間距才能 確保量到的 EMG 訊號是有效的[3,4]。還有必須注意電極間的間距也不適合過 小,在間距過小的情況下,一但遇到受測者有流汗的情形,即會造成導通現象, 會導致所量到的 EMG 訊號過小[3]。 最後電極在肌肉上的位置選擇部分,每一條肌肉皆分為四個區域,運動神經 區(innervation zone)、肌腱附著區(myotendonous junction)、側面邊緣區(lateral edge) 以及肌腹(belly),如果電極位置擺放在運動神經區和肌腱附著區的話,EMG 訊 號的大小跟頻率的分佈將會有扭曲的現象,如果電極的位置擺放在側面邊緣區, 將會有 crosstalk 的現象發生,也就是說所量得的訊號不只有我們想要的部分,可 能包含另外一個肌肉的 EMG 訊號,所以最正確的電極位置應該是放在肌腹。至 於接地電極擺放的原則較為單純,只要電極與皮膚的接觸良好,且盡量放在距離 量測電極遠一點的地方。 3. 濾波器設計 取得肌電波後,接著便是對肌電波進行濾除雜訊與萃取特徵的動作,然而在 進行這些動作之前,必須先了解正確與錯誤的肌電波,以及該用何種型式與參數 的濾波器濾除雜訊。以下為兩種肌電訊號量測時常出現的錯誤 EMG 訊號,圖 3(a) 是 60 赫茲的電源干擾訊號,這種訊號的干擾似乎是很難避免,根據我們的實驗, 每次都有這樣的干擾出現,在許多的 EMG 訊號控制的應用中,這是一個非常嚴 重的干擾,有些學者主張使用 60 赫茲的帶拒濾波器將此干擾濾除[5],而有些學 者認為 EMG 訊號的分佈範圍在 20 到 500 赫茲之間,而 50 到 150 赫茲是 EMG 訊號分部最密集的頻帶,如果使用 60 赫茲的帶拒濾波器將此干擾濾除很可能也 會將重要的訊號一併濾除[6]。圖 3(b)是人為移動的干擾,這也是一種很常見的干 擾源,主要的造成原因一種是電極滑動所造成的干擾現象,另一種則是電極導線
晃動所造成[6],雖然是常常會發生的干擾,但是這種人為的干擾卻相當好濾除, 原因是這種人為干擾訊號的頻率通常都不高,只要用截止頻率為 20 赫茲左右的 高通濾波器即可濾除[6,7]。 使用濾波器的目的是要將不要的雜訊濾除,並希望能夠用最小的濾波器階次 滿足特定的性能。濾波器主要可分為有限脈衝響應濾波器(FIR)和無限脈衝響應 濾波器(IIR),兩者最大的差別在於滿足相同的性能條件下無限脈衝響應濾波器 (IIR)所需的階數會比有限脈衝響應濾波器(FIR)低的多,故一般 EMG 訊號處理的 濾波器設計者皆使用無限脈衝響應濾波器(IIR),我們也是,然而在無限脈衝響應 濾波器(IIR)當中也有相當多種設計方法,不同的濾波器設計方法,具有不同的特 性,我們選擇使用 passband 具有最大平滑響應以及最小漣波的 Butterworth 濾波 器處理肌電波[4,5]。 在確定好所要使用的濾波器型式後,接下來要決定的是濾波器的參數,我們 所使用的濾波器有兩種:帶通濾波器和帶拒濾波器。選擇帶通濾波器的主要因素 是 EMG 訊號本身的頻率分佈範圍,大體而言,EMG 訊號皆分佈在 500 赫茲以 下,再加上必須濾除諸如電極鬆動的干擾之類的雜訊[6],一般而言皆將帶通濾 波器的通帶頻率設定為 30 至 500 赫茲左右, 5~800 赫茲、10~500 赫茲、20~500 赫茲、及 30~400 赫茲的通帶範圍也均有人提出 [5,6],不同的電極位置也會有些 許的差異。在實驗中,我們將五位實驗者實際所量到的 EMG 訊號分別進行 10~500、20~500、以及 30~400 赫茲的帶通濾波,實地觀察各個濾波器的輸出效 果,希望能找出適合我們的濾波器規格,典型的實驗結果如圖 4 所示,可以發現 EMG 訊號經過 30~400 赫茲的帶通濾波器濾波後所輸出的訊號干擾最少也最為 平穩。 在觀察圖 4 的輸出圖形時發現,雖然經過帶通濾波器濾波後的輸出訊號已經 有不錯的效果,但是 60 赫茲的交流雜訊依然存在,這種交流雜訊會影響我們對 Fire-Point 的判定,因此我們希望能夠用帶拒濾波器予以濾除,同樣地,我們使 用實驗的方法決定帶拒濾波器的頻率,實驗中對五位實驗者的 EMG 訊號分別使 用三種帶拒頻率:59~61、57~63、以及 55~65 赫茲,最後發覺選擇 55~65 赫茲 的帶拒濾波器效果最佳,交流雜訊的濾除效果最顯著,典型的實驗結果如圖 5 所示。 圖 4 經過帶通濾波器輸出波形圖 圖 5 經過帶拒濾波器輸出波形圖 圖 3 (a) 60 赫茲電源干擾的肌電波, 和(b) 人為移動干擾的肌電波 (b) 人為移動干擾的肌電波 (a) 60 赫茲電源干擾的肌電波
4. 指令轉換
經過雜訊濾除單元處裡後的肌電波必須再轉成義肢的控制指令,因此需再經 過一道手臂動作特徵萃取的程序,最後經過特徵萃取後的肌電波再經由指令轉換 單元轉成適當的指令,以驅動虛擬義肢,由於我們的目的只是藉由 EMG 訊號找 出肌肉動作與否,因此只擷取 IEMG (Integral of Electromyography)這個特徵。
在設計指令轉換單元時,為了能正確與輕鬆地控制虛擬義肢,我們在指令轉 換單元裡加入了兩個機制,第一個機制是消除來自其他肌肉的肌電波以及雜訊, 這一類的雜訊有兩種,第一種是指當我們進行手掌打開這個動作的時候,除了伸 指肌的 EMG 訊號外,有些時候屈指淺肌的 EMG 訊號也會有所變化,相反地, 當我們進行手掌關閉動作時,除了屈指淺肌的 EMG 訊號外,有時伸指肌的 EMG 訊號也會有所變化,如圖 6 所示,但這兩個訊號之間剛好呈現一個主從關係,即 主要肌肉的 IEMG 特徵會比較強,我們也是藉由這個關係將來自其它肌肉的肌電 波濾除。第二種雜訊指的是當進行某一個動作時,有時相對應的肌肉所產生的 EMG 訊號並非屬於單純地單一波峰訊號,如圖 7 所示,在這種情況下就很有可 能造成義肢的錯誤動作,此雜訊在我們多次的實驗當中可以發現幾乎是無法避免 的,並且很容易影響義肢動作的正確性,將它濾除是相當必要的,我們曾經使用 過兩種方法,第一種是增加動作偵測的臨界值門檻,因為通常這樣的干擾訊號跟 主要訊號比起來往往都會比較小,甚至是小很多,所以使用提高偵測門檻的方法 是可行的,但是這樣的方法有一個缺點,因為臨界值提高了,相對地使用者在控 制義肢的時候也必須使用較大的力量來驅動義肢,這會容易使得義肢的使用者有 疲勞的現象,因此我們改用另外一種方法,就是在不提高臨界值的情況下,當我 們偵測到第一個確定地動作訊號後,往後的一段時間內再出現的動作訊號我們會 將它忽略,這樣也可以避免義肢的錯誤動作,但是所謂的一段時間是多長呢?如 果取的太短將會失去我們所要的效果,相反地,如果這個區間取得太長,將會導 致義肢的靈敏性大大降低,在我們多次的實驗下,我們將這個時間區間定為 0.5 秒左右。 第二種機制是對指令的確認動作,伸指肌負責驅動義肢打開的動作,而屈指 淺肌則負責義肢的關閉,但如果伸指肌和屈指淺肌一有動作,義肢馬上就做出相 對應的動作,此控制機制雖然很直覺,卻很容易使得義肢產生錯誤動作,而且根 據重新義肢公司對義肢使用的的調查發現,在這樣的控制方式下對義肢作微調的 時候手部必須一直保持在出力狀態,使得手非常容易出現疲累的狀況,有很多重 新義肢公司的義肢使用者因為這個原因而放棄使用肌電義肢,重新選用其他型式 的義肢,如功能手;因此我們定義了三個指令:Stop、On、以及 Off,分別代表 〝允許義肢接受開啟或關閉的指令〞、〝夾爪開啟〞、以及〝夾爪關閉〞,以此對指 令進行確認,也就是說當第一次的伸指肌訊號進來時,並沒有辦法驅動義肢的開 圖 7 非單一波峰訊號 圖 6 來自其他肌肉的肌電波干擾
啟動作,而是停止義肢的關閉動作,並且允許義肢接受新的動作指令,如果下一 個伸指肌的 EMG 訊號再進來時,義肢才會真的執行開啟的動作,此時使用者即 可將手臂放鬆,因為義肢會一直執行這樣的動作直到使用者的手臂作相反的動作 時,義肢才會停止,也就是說義肢會一直執行開啟的動作,直到下一個進來的訊 號是屈指淺肌的 EMG 訊號,此時才會進行停止義肢的開啟動作,並且允許義肢 的關閉動作,以此類推,此設計不但可以降低義肢誤動作的困擾,更可以改善在 義肢使用上使手臂疲勞的現象。 5. 實驗結果 國內肌電義肢使用者多為職業災害所導致的截肢者,因此以青壯年人為主, 且多為從事勞力與高危險性工作的男性,因此實驗探討 20~30 歲的男性使用所建 立系統的正確率以及人類適應性對正確率的影響。此實驗共計有五位 20~30 歲男 性實驗者,實驗規劃以練習時間區分,第一次實驗為實驗者經過五分鐘的練習後 進行實驗,目的在於驗證系統於該練習時間條件下的正確率。依此類推,每次增 加練習時間五分鐘,直至系統正確率已到達既定的 97%正確率後停止實驗,目的 在驗證訓練時間長短,亦即人類適應性,對系統正確率的影響。 每位實驗者依照同樣的要求,必須讓義肢做同樣的手掌開合動作,並紀錄手 掌的動作過程,依據上述三次實驗共計十五筆實驗的結果如表 1 與表 2 所示。由 表 1 的結果發現,當訓練時間由五分鐘增加為十分鐘,再陸續增加為十五分鐘 時,實驗者一、二、四、五的正確率皆隨著練習時間的增加而攀升,而整體平均 正確率也從 92%、96%增加至 98%,由此可知訓練時間也會影響動作的正確率, 訓練的時間較長者,義肢動作正確率也就越高,這是由於人類的適應性所造成, 肌電義肢使用越久,使用者對肌電義肢的適應性越高,正確率也就越高。 表 2 呈現五位實驗者分別於三次實驗的錯誤動作狀況,對於手掌關閉動作, 共有五次錯誤,手掌打開的動作有兩次錯誤,手掌關閉動作的錯誤明顯較手掌打 開動作為高,此問題正呼應先前所述,屈指淺肌周圍分佈較多的肌肉群,且所處 的位置比較靠近肌腱附著區,貼電極時若位置選擇有所偏差就會造成 EMG 訊號 的不正確。另一現象是實驗者連續做兩次相同動作(如連續兩次手掌開啟或關 閉),錯誤次數為四次,做不同動作(如手掌的動作由開啟轉關閉或關閉轉開啟), 錯誤次數為兩次,手掌連續做兩次相同動作的錯誤次數明顯偏高,原因應該是起 因於肌肉的疲勞現象,當肌肉持續收縮時,運動神經元需要時間恢復所導致系統 的動作錯誤。 表 1 五位實驗者於三次實驗的動作正確率 表 2 五位實驗者於三次實驗的動作 錯誤狀況 第一次 實驗 正確率 第二次 實驗 正確率 第三次 實驗 正確率 實驗者一 90% 100% 100% 實驗者二 90% 90% 100% 實驗者三 90% 90% 90% 實驗者四 90% 100% 100% 實驗者五 100% 100% 100% 平均正確 率 92% 96% 98% 手掌關閉的錯 誤次數 手掌開啟的錯 誤次數 5 2 連續動作的錯 誤次數 非連續動作的 錯誤次數 4 2
二、腦波訊號(EEG)分析與即時處理研究
我們已開發一腦波訊號處理技術,利用 ICA 演算法有效去除腦波訊號中之 雜訊成份,並實現於 OMAP 嵌入式系統,達成生理訊號即時處理的目標。
1. 獨立成分分析法(Independent Component Analysis)
◆ 獨立成分分析法
一個狹義的線性獨立成分分析模型基本定義,是使用統計上的潛在變數模型 (latent variables model) , 假 設 x 為 可 觀 察 到 的 n 個 獨 立 成 分 線 性 組 成 的
1, 2..., n x x x ,是線性獨立隨機變數sj的線性組合 1 1 2 2 ... j j j jn n x a s a s a s for all j ICA 演算法就是要盡可能的找到一組x = As的解,使成分s 之間盡可能的互i 為獨立。其中 x = As x:觀察到的隨機變數
x x1, 2...,xn
s :潛在變數(latent variables)成分
s1,...,sn
,sj互為獨立 A: m n 常數aj所構成的混合矩陣(mixing matrix)。 獨立成分是潛在變數,無法直接由觀察得知,其中 A 矩陣也是未知,故 ICA 演算法便是利用觀察到的隨機向量x,將A和 s 估測出來。ICA 演算除了一些統 計獨立的假設之外,在使用時有一些限制需要注意: (1) 所有獨立成分sj都是非高斯分佈,這主要是根據中央極限定理(central limit theorem),非高斯分佈且互為獨立的隨機變數之和,其分佈會比任一獨立隨 機變數的分佈更接近於高斯分佈。ICA 利用此一定理做逆向思考,找出最 不是高斯分佈的成分,就最有可能是要找的獨立成分。 (2) 觀察到的混合訊號,其數目 m 最少要和獨立成分的數目 n 相同(mn)。在 m 之情形,n A的反矩陣不存在,而現今的 ICA 演算法 m n 在之下都不 成立。(3) A的行必須有完整秩(full column rank),可使矩陣A為非奇異,而x = As必 有解。
◆ 獨立成分分析演算法(ICA Algorithms)
ICA 性 質 與 ICA 的 目 標 函 數 以 及 演 算 法 有 關 。 目 標 函 數 需 有 一 致 性 (consistency),不管初值不何,最後都會收斂於同一點,且誤差最小。演算法必 需考慮到收斂速度穩定度。找出目標函數的方法很多,例如以高次統計為基礎的 峰態(kurtosis),及資訊理論(Information theory)中相互資訊(Mutual Information)的 觀念。ICA 利用資訊理論,將獨立成分之間相互資訊最小化為目標,與找非高斯 分佈的意義相當。為了找出目標函數,將此一觀念具體化,利用上面資訊理論的 相互資訊概念:相互資訊是個別變數不確定性和所有變數不確定性兩者之義,而 不確定性即為熵(Entropy),定義熵為H x :
1 2
2 1 , ..., log M M i i i H p p p c p p
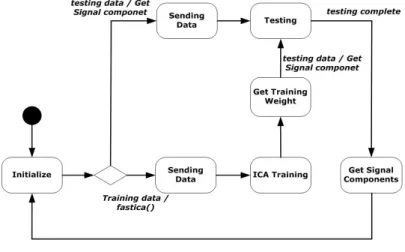
c is usually 1一般而言,常用的方式有:資訊最大法(information maximization approach) 和快速獨立分析法(FastICA)。在嵌入式單板中的實現,選用 FastICA,做為在單 板上實現的演算方式。 2. 腦波訊號處理嵌入式系統之設計 利用虛擬實境的技術,在不同的場景刺激下,經由腦波量測儀器測得受測者 的腦波訊號,接著做腦波訊號處理分析,擷取訊號特徵,將特徵訊號加以分類, 得到不同的輸出。由於整個分析訊號處理演算法的複雜,嵌入式單板勢必面臨大 量的特殊運算,但一方面希望在嵌入式單板上,保有 ARM 處理器的移植性,發 展性和作業系統的支援,另一方面,又希望加入 DSP 所擁有的優秀計算能力, 因此,採用德州儀器(TI)所發展出的新處理器 OMAP 嵌入式單板 Innovator Development Kit 為發展平台,設計一腦波訊號處理系統。 ◆ 設計功能規格與目的 本實驗未來目標設計是用於將腦波訊號處理的儀器微小化,甚至於攜於受測 者身上使受測者本身即可隨時讀取個人的腦波資料,亦或是將這個系統裝置結合 於不同的嵌入式系統產品中。根據目前分析的需求在其內部加入快速傅立葉轉換 (FFT)與獨立成分分析(ICA),最後將會加入腦波之分類與控制溝通之機制,做為 分析之人機介面。 ◆ 訊號分析處理方法 加入基本 FFT 的能力於腦波分析的嵌入式單板中,在腦波分析前便可利用 FFT 觀察腦波頻率的分佈。使得訊號除了時域的資訊外,更進一步的有頻域的資 訊。當然這樣是還不夠的,為了能更精確合理的解釋訊號,開始有了各種利用數 學機率統計的方式找出這些訊號的特徵,採用獨立成分分析法(ICA,Independent Component Analysis)作為腦波訊號特徵擷取方法。 ◆ 系統狀態設計 在整個腦波分析實驗中,在主要是以 ICA 為分析理論,找尋訊號的特徵, 將訊號原來的樣子還原。根據 ICA 所需的工作,將系統分成兩種處理狀態,分 別是 ICA training,訓練出 ICA 所要求的權重向量(Weight)的值。還有做資料的 testing,將混合的資料乘上所求得的矩陣,便可得訊號的特徵組成。圖 8 以中間 的決策點來分成這兩種處理狀態流程。 ◆ 系統架構設計 經過系統狀態設計之後,接下來便要對系統架構做個規劃。包括,接收提供 訊號原始資料,配置系統初始狀態,到 ICA Training 和求得訊號資料的成分等工 作。基於使用 OMAP 微處理器,同時擁有 ARM 和 DSP 的兩個架構,接下來便 是將工作適當的分配給兩個處理器使用。在工作的安排上,依運算的需要分成兩 個部分,一個部分是不需要大量運算,主要是做做資料接收傳送,以及操作介面 的安排,這個部分工作交由 ARM 處理,另一部分則是,只做 ICA 運算功能的部 分,交由運算能力強的 DSP 來處理。
圖 8 腦波分析系統狀態圖 3. 實驗結果 ◆ ICA 腦波訊號分離 ICA 正確性的測試中,進行 ICA 分離時,訊號選取其中一個做為參考用, 經過 ICA 分離出另一個訊號該有的成分。這裡選取需分離雜訊的腦波資料,做 分離測試。 實驗中選擇一眼動附近的腦波訊號,做為雜訊的參考依據,和一受眼動訊號 影響的腦波訊號一起經過 ICA 運算。其輸入訊號和運算的結果如圖 9,眼動雜 訊參考為第一個訊號,而第二個訊號則是受到眼動影響的腦波訊號,經 ICA 運 算結果,圖 9(b)中所得第一個訊號應該是去除眼動雜訊所留下腦波訊號的資訊。 ◆ 系統效能測試實驗 OMAP 和一般僅有 ARM 微處理器的嵌入式系統最大的不同在於其運算效能 能大幅度的提升。另一個特點是在 DSP 處理資料時,不會影響到 ARM 的部分, 此時 ARM 可以處理其他行程,和 DSP 做平行處理,對系統做一個效能測試比 較,讓具有 DSP 和不具有 DSP 的系統比較其中的效能差異度。 圖 9(b) 由 ICA 得到腦波的成分資料 圖 9(a) 輸入腦波測試訊號於 ICA
經 ICA 所得到的 ICA Components 腦波輸入訊號
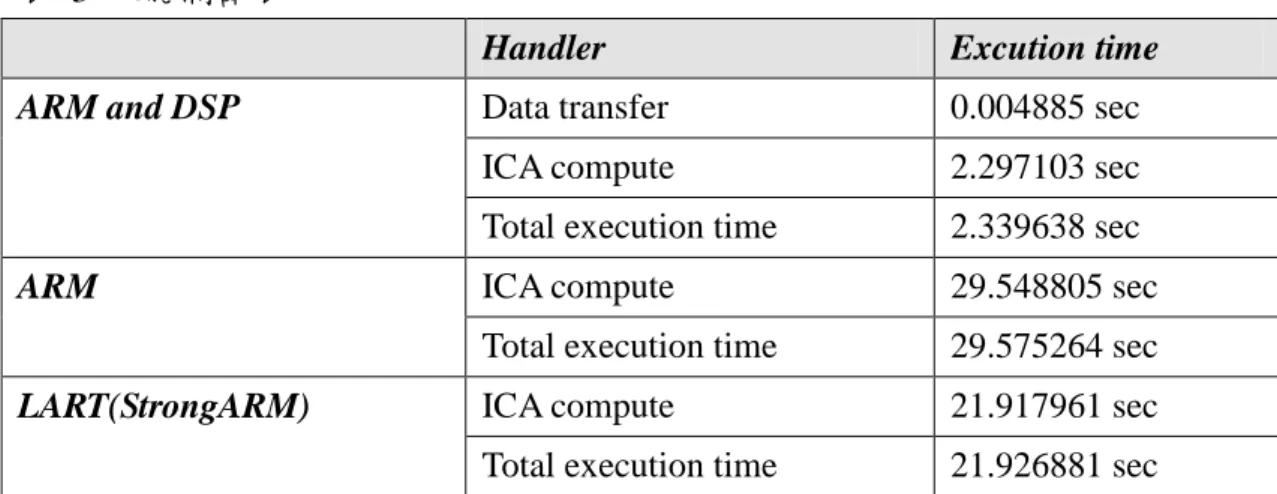
表 3 效能測試表
Handler Excution time
Data transfer 0.004885 sec ICA compute 2.297103 sec
ARM and DSP
Total execution time 2.339638 sec ICA compute 29.548805 sec
ARM
Total execution time 29.575264 sec ICA compute 21.917961 sec
LART(StrongARM)
Total execution time 21.926881 sec
在計算上 ICA 計算時間,和計算資料量和一開始所取的隨機矩陣有相當大 的關係,所以在測試中,輸入的隨機矩陣都是一樣的。表 3 為測試結果,ARM 和 DSP 處理 ICA 演算法平均時間為 2.297103 秒,比 ARM 的 29.548805 秒和 StrongARM 的 21.917961 秒分別快的有 9~11 倍不等的速度。
三、結論
本年度我們發展了基於肌電波之虛擬義肢控制系統,並在指令的轉換與確認 上加以設計,減輕使用者在肌電義肢控制上的疲勞感,並以實驗印證所發展系統 的可行性;實驗結果顯示,在足夠的訓練時間下,整體的動作正確率可達到 98%。 在系統的發展中,我們更了解肌電波的特性,因而提昇我們將肌電波應用在機器 臂與真實義肢上的可能性。此外,我們亦開發一腦波訊號處理技術,利用 ICA 演算法有效去除腦波訊號中之雜訊成份,並實現於 OMAP 嵌入式系統,和一般 的腦波分析運算系統相比,大幅縮小系統的體積以及耗電量。由於 OMAP 中含 有 ARM 與 DSP 雙核心處理器,且經由實際驗證其運算效能與一般僅有 ARM 微 處理器的嵌入式系統比較,有大幅度的提升。參考文獻
[1] R. Reiter, “EineneueElektrokunsthand,”Grenzgebiete der Medizin, Vol. 1, no. 4, pp. 133-135. 1948.
[2] H. P. Huang and C. Y. Chen, “Development of a Myoelectric Discrimination System for a Multi-DegreeProstheticHand,”IEEE Int. Conf. on Robotics & Automation, pp. 2392-2397, 1999.
[3] D.Gordon and E.Robertson,“Electromyography:Recording,”Biomechanics Laboratory, School of Human Kinetics, University of Ottawa, Ottawa, CANADA, 2004.
[4] C. J. D. Luca, “The Use of Surface Electromyography in Biomechanics,” NeuroMuscular Research Center, Boston University, 1993.
[5] H.P.Huang,Y.H.Liu,L.W.Liu,and C.S.Wong,“EMG Classification for Prehensile Posture Using Cascaded Architecture of Neural Networks with Self-Organizing Maps,”IEEE Int. Conf. on Robotics & Automation, pp. 1497-1502, 2003.
[6] C.J. D. Luca, “Surface Electromyography: Detection and Ecording,” DelSys Incorporated, 2002.
[7] C. P. Fermo, C. V. D. Vincenzo, T. F. Bastos-Filho, and V. I. Dynnikov, “Developmentofan AdaptativeFramework fortheControlofUpperLimb Myoelectric Prosthesis,”IEEE/EMBS Int. Conf., pp. 2402-2405, 2000.
[8] T. Kobayashi and K. Takahashi, Linux DSP Gateway Specification Rev2.0, Nokia Corporation, November 13 2003.
[9] Innovator Development Kit for the OMAP Platform User’s Guide (SPRU667), Texas Instruments.
[10] Innovator Development Kit forthe TexasInstrumentsOMAP™ PlatformDeluxe ModelUser’sGuide, Texas Instruments.
[11] TMS320 DSP/BIOS User’s Guide Rev B(SPRU423B), Texas Instruments. [12] TMS320C55x Optimizing C/C++ Compiler User’s Guide Rev E(SPRU281E)
Texas Instruments.
[13] Code Composer Studio Getting Started Guide Rev C(SPRU509C), Texas Instruments.
[14] A. Rubini and J. Corbet, Linux Device Driver 2ndEdition, O’Reilly, June 2001. [15] K. Yaghmour, Building Embedded Linux Systems, O’Reilly, April 2003.
[16] W. R. Stevens, Advanced Programming in the UNIX Environment, Addison-Wesley, June 1992.
[17] K. A. Robbins and S. Robbins, UNIX Systems Programming-Communication, Cocurrency, and Threads, Prentice Hall, 1996.
[18] A. A. Khan, Practical Linux Programming:Device Driver, Embedded Systems, and the Internet, Charles River Media, 2002.
[19] A. Silberschatz, P. B. Galvin, and G. Gagne, Operation System Concept, John Wiley & Sons, 2003.
[20] A. Hyvärinen and E. Oja, Independent Component Analysis : A Tutorial Neural Networks, Vol. 13, no. 4-5, pp. 411-430, 2000.
[21] G. Booch, J. Rumbaugh, and I. Jacobson, The Unified Modeling Language User Guide, 張裕益譯,UML 使用手冊,臺北縣:博碩文化,2001。
[22] W. Wolf, Computers as Components : Principles of Embedded Computing System Design, Morgan Kaufmann, 2001.
[23] A. V. Oppenheim, R. W. Schafer, and J. R. Buck, Discrete-Time Signal Processing Second Edition, Prentice Hall, 1999.
[24] TI OMAP™ Platform,http://focus.ti.com/omap/docs/omaphomepage.tsp
[25] rrload Bootloader,http://www.ridgerun.com/bsp/rrload.html
[26] Neuro Scan,http://www.neuro.com/
[27] 廖志昇,”虛擬實境動態模擬系統之即時嵌入式控制單板研製”,國立交通大 學,碩士論文,民國九十一年。
[28] 陳建宏,”虛擬實境動態模擬器之嵌入式即時控制系統”,國立交通大學,碩 士論文,民國九十二年。